博 士 論 文
終端コスト関数を用いた安定化モデル予測制御に関する研究
主任指導教員
藤田 政之 教授
金沢大学大学院 自然科学研究科
機能開発科学専攻 電子科学講座
学籍番号 0223022202
河合 康典
2005 年 1 月
c 2005 by Yasunori Kawai
Copyright c
2005
Yasunori Kawai
All rights reserved
要旨
本研究では, 終端コスト関数を用いた安定化モデル予測制御を考える. そこで, 終端コス
ト関数の構成法とその終端コスト関数を用いたモデル予測制御によるシステムの安定性を
示す.
はじめに, 一般的な線形時変システムに対して出力フィードバックによるロバストモデル
予測制御を考える. 出力フィードバックコントローラを構成するためには, 2 本のリカッチ
微分方程式それぞれに対して終端不等式条件が必要となる. そこで, 従来研究において提案
されている終端不等式条件を特別な場合として含む 2 本の一般化終端不等式条件を提案す
る. そして, 一般化終端不等式条件を用いて構成される終端重み関数を用いたロバストモデ
ル予測制御問題に対して, コントローラを提案し, 閉ループ系の指数安定性と L2 ゲインに
関する有界実性を示す. 特に, 平方完成に基づくブロック対角行列を用いた手法が重要な役
割を果たしている. 最後に, 提案したロバストモデル予測制御を用いて数値例を示し, その
有効性を検証する.
次に, 自己スケジューリングパラメータを持つ線形システムに対するモデル予測制御を
考える. 自己スケジューリングパラメータを持つ線形システムでは, スケジューリングパ
ラメータが非有界である hidden loop 問題 を考慮することが重要である. そこで, hidden
loop 問題を考慮した control Lyapunov 関数の構成法を提案する. そして, 提案する control
Lyapunov 関数を終端コスト関数として用いたモデル予測制御を用いてシステムの安定性を
示す. さらに, 飛行船システムに適用して, 定置制御のシミュレーションと実験をおこない,
有効性を検証する.
最後に, 受動性を有するロボットシステムに対するモデル予測制御を考える. 受動性を有
するロボットシステムでは, 解析的な Lyapunov 関数が提案されている. そこで, Lyapunov
関数をモデル予測制御の終端コスト関数として適用することを提案し, ロボットシステムの
Lyapunov 関数を control Lyapunov 関数とするための条件を示す. そして, 受動性に基づく
ロボット制御において従来研究で提案されている手法に対して, control Lyapunov 関数を終
端重み関数としたモデル予測制御によりシステムの安定性を示す. さらに, 提案したモデル
予測制御を SICE-DD アームに適用して, 定置制御と追従制御のシミュレーションと実験を
おこない, 有効性を検証する.
i
目次
第1章
序論
1
1.1 研究の背景と動機 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1.2 従来研究 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
1.3 研究の目的 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
1.4 論文構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
第2章
線形時変システムのロバストモデル予測制御
11
2.1 はじめに . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 問題設定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3 一般化終端不等式条件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4 ロバストモデル予測制御の安定性 . . . . . . . . . . . . . . . . . . . . . . . . 21
2.5 例題 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.6 おわりに . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
第3章
自己スケジューリングパラメータを持つ線形システムのモデル予測制御
38
3.1 はじめに . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.2 問題設定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.3 モデル予測制御の安定性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.4 飛行船システム . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.5 シミュレーション . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.5.1
コントローラシンセシス . . . . . . . . . . . . . . . . . . . . . . . . .
47
3.5.2
シミュレーション結果 . . . . . . . . . . . . . . . . . . . . . . . . . .
47
3.6 制御実験 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.6.1
実験環境 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
52
3.6.2
実験結果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
53
3.7 おわりに . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
目次
ii
第4章
受動性を有するロボットシステムのモデル予測制御
57
4.1 はじめに . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.2 問題設定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.3 モデル予測制御の安定性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.3.1
方法 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
60
4.3.2
方法 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
62
4.3.3
方法 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
64
4.4 シミュレーション . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.4.1
定置制御 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
4.4.2
追従制御 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
70
4.5 制御実験 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4.5.1
実験環境 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
74
4.5.2
定置制御 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
75
4.5.3
追従制御 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
79
4.6 おわりに . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
第5章
結論
83
5.1 本研究での成果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
5.2 今後の課題 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
付 録 A 線形時不変システムに対する H∞ 制御
86
A.1 H∞ 制御問題 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
A.2 T の導入 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
A.3 コンローラの再構成
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
A.4 証明 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
A.4.1 閉ループシステム . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
A.4.2 補足計算 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
A.4.3 証明 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
謝辞
104
参考文献
105
本研究に関する発表論文
113
iii
図目次
1.1 Robust control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
1.2 Equilibrium point . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
1.3 Equilibrium state . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
1.4 Model predictive control . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
1.5 Optimal control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
1.6 Model predictive control . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
2.1 Terminal cost funtion for the problem . . . . . . . . . . . . . . . . . . . . . . 14
2.2 Relation between M and F
. . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.3 Relation between M and F
. . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.4 Relation between T and G . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.5 Property of M . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.6 Property of T . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.7 Relation between M̂ and F
. . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.8 Relation between T̂ −1 and G−1
. . . . . . . . . . . . . . . . . . . . . . . . . 27
2.9 Responce to the disturbance (solid: γ = 0.9, dashed: γ = 1.5, dot-dashed:
γ = 1.9) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.10 Responce to the disturbance (solid: T = 0.1 [s], dashed: T = 0.05 [s], dotdashed: T = 0.15 [s]) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.11 Responce to the disturbance (solid: T0 = 0.1 [s], dashed: T0 = 0.05 [s],
dot-dashed: T0 = 0.15 [s]) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.12 Responce to the disturbance (solid: T = T0 = 0.1 [s], dashed: T = T0 = 0.05
[s], dot-dashed: T = T0 = 0.15 [s]) . . . . . . . . . . . . . . . . . . . . . . . . 35
3.1 System with the scheduling parameter . . . . . . . . . . . . . . . . . . . . . 38
3.2 System with the self-scheduling parameter . . . . . . . . . . . . . . . . . . . 38
3.3 Unmanned blimp system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
図目次
iv
3.4 Image from the camera in Fig. 3.3 . . . . . . . . . . . . . . . . . . . . . . . . 45
3.5 Model of the blimp in the image plane . . . . . . . . . . . . . . . . . . . . . 45
3.6 Regulation problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.7 Trajectory of x1 − x2 (solid: Model predictive control(T = 0.1 [s]), dashed:
Model predictive control (T = 1 [s]), dot-dashed: Optimal control)
. . . . . 49
3.8 States (solid: Model predictive control (T = 0.1 [s]), dashed: Model predictive control (T = 1 [s]), dot-dashed: Optimal control) . . . . . . . . . . . . . 50
3.9 Control input (solid: Model predictive control (T = 0.1 [s]), dashed: Model
predictive control (T = 1 [s]), dot-dashed: Optimal control) . . . . . . . . . . 51
3.10 Unmanned blimp system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.11 Trajectory of x1 − x2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.12 States . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.13 Control inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.1 SICE-DD arm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.2 Schematic diagram of the two-link direct drive manipulator . . . . . . . . . . 59
4.3 SICE-DD arm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
4.4 Block diagram of passivity-based control (Method 1) . . . . . . . . . . . . . 61
4.5 Block diagram of model predictive control (Method 1) . . . . . . . . . . . . . 61
4.6 Block diagram of passivity-based control (Method 2) . . . . . . . . . . . . . 63
4.7 Block diagram of model predictive control (Method 2) . . . . . . . . . . . . . 63
4.8 Block diagram of passivity-based control (Method 3) . . . . . . . . . . . . . 64
4.9 Block diagram of model predictive control (Method 3) . . . . . . . . . . . . . 65
4.10 Regulation problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.11 Method 1 (solid: T = 0.05 [s], dashed: T = 0.1 [s], dot-dashed: T = 0.5 [s]) . 67
4.12 Method 2 (solid: T = 0.05 [s], dashed: T = 0.1 [s], dot-dashed: T = 0.5 [s]) . 68
4.13 Method 3 (solid: T = 0.05 [s], dashed: T = 0.1 [s], dot-dashed: T = 0.5 [s]) . 69
4.14 Tracking problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4.15 Method 2 (solid: T = 0.05 [s], dashed: T = 0.1 [s], dot-dashed: T = 0.5 [s]) . 72
4.16 Method 3 (solid: T = 0.05 [s], dashed: T = 0.1 [s], dot-dashed: T = 0.5 [s]) . 73
4.17 Experimental Environment . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4.18 Method 1 (solid: T = 0.05 [s], dashed: T = 0.1 [s], dot-dashed: T = 0.5 [s],
dot: Passivity-based control) . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
v
4.19 Method 2 (solid: T = 0.05 [s], dashed: T = 0.1 [s], dot-dashed: T = 0.5 [s],
dot: Passivity-based control) . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
4.20 Method 3 (solid: T = 0.05 [s], dashed: T = 0.1 [s], dot-dashed: T = 0.5 [s],
dot: Passivity-based control) . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.21 Method 2 (solid: T = 0.05 [s], dashed: T = 0.1 [s], dot-dashed: T = 0.5 [s],
dot: Passivity-based control) . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
4.22 Method 3 (solid: T = 0.05 [s], dashed: T = 0.1 [s], dot-dashed: T = 0.5 [s],
dot: Passivity-based control) . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
A.1 H∞ control problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
A.2 Closed loop system Tzw . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
A.3 Closed loop system Tzw . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
表目次
vi
表目次
3.1 Parameter values of the blimp . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.2 Values of the cost function . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.1 Values of the cost function . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.2 Values of the cost function . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
1
第 1章
序論
1.1
研究の背景と動機
実システムに対する制御系設計では, 理想的な制御対象の数学モデルを導出し, その数学
モデルに対して制御系が構成される. しかし, 一般的に扱う実システムは非線形システムで
あることから, 系統的な制御系設計をおこなうことは困難である. そこで, 従来研究ではシ
ステムの平衡点に着目し, その平衡点近傍における線形時不変システムを導出し, その線形
時不変システムに対して制御系設計がおこなわてきた.
1980 年代から 1990 年代前半にかけて線形時不変システムに対するロバスト制御が確立さ
れた (図 1.1). 線形時不変システムに対するロバスト制御では, 制御対象の不確かさを考慮
することに重点が置かれ, 制御対象の不確かさや外乱などに対してロバストな安定性が必要
であることが示された. さらに, ロバスト安定性を保証した上で制御性能までを保証するロ
バスト性能の重要性も示された. このように, 制御系設計をおこなう際には制御対象を数学
的にモデリングした理想的な数学モデルだけでなく, 実システムに存在する様々な不確かさ
を考慮することが重要であることが認識された. ロバスト制御は, 現在においても多くの実
システムに適用されており, 最も実際に役立つ制御の 1 つであると考えられる.
しかし, 線形時不変システムから構成される制御系は, 平衡点近傍の局所的な範囲に対し
てのみ有効であり, 平衡状態が一定 (図 1.2) とみなすことができるシステムにしか有効でな
い. 実際の実システムでは, 平衡点ではなく平衡状態が変化 (図 1.3) したり, または多数存
在することがある. このような場合には, 平衡点近傍における線形時不変システムではなく,
非線形システムに対する制御系設計が重要となる.
そこで 1990 年代半ばから, 線形時不変システムで考えられてきたロバスト制御がより一
般的な非線形システムにも応用され始めた. このことは, ロバスト制御の動機でもあるよう
に, 理想的な数学モデルだけでなく, 実システムに存在する様々な不確かさを考慮すること
第 1 章 序論
2
∆
w
z
G
u
y
K
図 1.1: Robust control
Output
Equilibrium State
Output
Equilibrium Point
t [s]
t [s]
図 1.2: Equilibrium point
図 1.3: Equilibrium state
が重要であることを多くの工学者が認識したためであると考えられる. しかし, 非線形シス
テムに対するロバスト制御問題は, 解となる条件は提案されているものの, 実際に解くこと
は困難である. 現在においても, 特別な非線形システムにしか解かれていなく, 一般的な非
線形システムに対しては, 近似的な方法を用いることしかおこなわれていない.
非線形システムに対するロバスト制御が困難である理由は, 線形システムに対するロバ
スト制御が理論的な安定性を保証している線形システムの最適制御を発展した結果となっ
ているのに対して, 非線形システムの最適制御は安定性が保証されていないからである. こ
のことは, 非線形システムの最適制御問題の解が変分法を基にした Euler-Lagrange 方程式
を解くことで与えられ, 動的計画法に基づく Hamilton-Jacobi-Bellman 方程式を解くこと
によって与えられていないからである. Hamilton-Jacobi-Bellman 方程式は, 状態フィード
バックとして解が与えられ, 初期値に依存しないコントローラを構成することができるため,
安定性の議論がおこなうことができるが, 一般的に解くことは困難である. それに対して,
Euler-Lagrange 方程式は解くことができるが, 開ループの制御入力が求まるため, 初期値に
依存した解となり, 安定性を理論的に考えることはできない.
よって, 理論的に安定性を保証した非線形システムに対する最適制御を研究することによ
り, 非線形システムに対するロバスト制御につながっていくことが期待できる. そこで, 本
1.1. 研究の背景と動機
3
研究では理論的に安定性を保証する非線形システムに対する最適制御をおこなうために, モ
デル予測制御 (Model Predictive Control) または receding horizon 制御 (Receding Horizon
Control) と呼ばれる制御手法を導入する.
モデル予測制御とは, 次のような制御手法である. これを図 1.4 を用いて示す. 現在時刻
t から有限時間先の t + T までにおいて最適な制御入力列とその予測値を求める. そして得
られた最適な入力列の中で最初の制御入力 u(t) のみを現在時刻 t において入力する. 次の時
刻では, 再び現在時刻の状態を初期値として現在時刻 t から有限時間先の t + T までにおい
て最適な制御入力列とその予測値を求め, その中で最初の制御入力 u(t) のみを入力する. さ
らに次の時刻では, 同様な手順を繰り返していく. 各時刻においては, 開ループの最適制御
問題を解いているが, 各時刻において初期値をフィードバックして考えていることから, 開
ループ系から閉ループ系にすることができる (図 1.5, 1.6).
reference
predictive output
output
predictive input
control input u(t)
t
t+T
reference
output
predictive output
predictive input
control input u(t)
t+T
t
reference
output
t
predictive output
predictive input
control input u(t)
t+T
図 1.4: Model predictive control
モデル予測制御を用いることで, 従来からおこなわれてきた最適制御を発展させるように,
理論的な安定性を保証する非線形最適制御を構築することが期待される. 特に, 近年のコン
ピュータの進歩によりオンラインで非線形最適制御問題を解くことが可能となっている. ま
第 1 章 序論
4
r
Optimal
Control
u
Plant
x
図 1.5: Optimal control
r
Model
Predictive
Control
u
Plant
x
図 1.6: Model predictive control
た, 非線形最適制御問題を扱うことができるソフトウェアも多く開発されている. このよう
に非線形最適制御は, 理論的な進展のみならず実際に役立つソフトウェアの開発も含めて今
後はさらに発展することも期待される.
1.2
従来研究
本節では, はじめに非線形システムのロバスト制御が動機付けられた線形時不変システム
のロバスト制御の背景となる従来研究について簡単に紹介する. 次に, 非線形システムのロ
バスト制御を構成するために必要となる安定性を保証するモデル予測制御の従来研究につ
いて紹介する. 最後に, ロバスト性を考慮したロバストモデル予測制御の従来研究について
紹介する.
線形時不変システムのロバスト制御
1960 年代に Kalman によって, 線形時不変システムに対する最適制御理論となる LQ 制
御が提案された. 1960–1970 年にかけて LQG 制御, のちに H2 最適制御と呼ばれる制御が提
案された [2]. しかし, 航空機 F-8C に LQG 制御を用いたところ, よい結果を得ることはで
きなかった [3]. その原因として, LQG 制御には LQ 制御で保証できるような安定余裕がな
いことが示された [15]. この結果, 1980 年代ではモデルの不確かさが問題となり, Zames に
よってロバスト制御が提案され, Doyle らによって H∞ 制御が確立された [16]. また, Doyle
らによって H∞ 制御だけでは考慮されていなかった性能について構造化特異値 µ を用いる
ことにより, ロバスト安定性を保証した上でさらに性能までを保証するロバスト性能の重要
性が示された. 1990 年代では, H∞ 制御, µ-シンセシスに代表されるロバスト制御が多くの
実システムに適用されて成功を収めた.
線形時不変システムのロバスト制御の制御系設計をおこなうためのソフトウェアとして
Robust Control Toolbox [14] と µ-Analysis and Synthesis Toolbox [7] が知られている. ま
た, 上記の Toolbox ではリカッチ方程式を用いていたのに対して, リカッチ不等式を用いた
線形行列不等式 (Linear Matrix Inequality: LMI) による LMI Toolbox [20] がある. 近年,
1.2. 従来研究
5
これら 3 つの Toolbox は統合され Robust Control Toolbox (ver. 3) [8] となっている.
モデル予測制御 (Receding Horizon 制御)
はじめて安定性を保証したモデル予測制御について議論されたのは, Kleinman [35] や
Thomas [70] である. 無限ホライズンの開ループの最適制御問題を解くことは実用的ではな
いため, 有限ホライズンで近似することをおこなった. Kleiman は, 線形システムの有限ホ
ライズンのエネルギーを最小にする制御を考え, 最適なコントローラは有限時間の可制御性
グラミアンを用いたコントローラで構成できることを示した. また, 可制御性グラミアンの
逆行列を用いて Lyapunov 関数を構成した. また, Thomas は有限ホライズンの LQ 制御を
考え, システムの状態に関する終端拘束条件 x(t + T ) = 0 を意味する無限ホライズンの終端
コスト関数を用いた. このことは, コントローラの構成に必要となるリカッチ微分方程式の
解に終端条件 M(t + T ) = 0 を与えることにより実現している. しかし, これらの方法は発
展することはなかったが, 無限ホライズンの LQ 制御に対する方法を与えた.
Kwon ら [37, 38] は, より一般的な LQ 制御を有限ホライズンで解いている. 安定性を保
証するための終端拘束条件を意味する終端条件 M(t + T ) = 0 を用いている. これらの研究
から, 終端拘束条件を用いて安定性を保証することができることが示された. このとき以来,
モデル予測制御は多変数の拘束のある化学プラントに対して基本的な制御手法となり, 多く
のシステムで用いられている [21, 44]. しかし, 近年になるまでモデル予測制御が適用可能
なシステムは, そもそも安定なプラントであり, 整定時間が非常に長いシステムに限られて
いた.
モデル予測制御の安定性に関する研究として, 大きな転換となった研究に Chen ら [12] の
研究がある. 文献 [12] では, 終端拘束条件を用いたとき, 連続なシステムに対して拘束がな
いモデル予測制御の安定性を Lyapunov 関数を用いて示している. この後, Keerthi ら [31]
は拘束がある離散時間の非線形システムに終端拘束条件を用いたモデル予測制御の安定性
を Lyapunov 関数を用いて示した. このとき以来, モデル予測制御の安定性を保証するため
に Lyapunov 関数を用いるようになり, 90 年代には, モデル予測制御の安定性を保証するい
くつかの方法が提案された. これらの方法のいくつかは, 安定性を保証するために終端拘束
条件を用いている. 連続システムに関しては, Mayne ら [43] の研究がある. しかし, 終端拘
束条件は, 有限ホライズンの最適問題において計算的には不可能となる場合が多い. そこで,
Michalska ら [45] によって終端拘束条件が緩和された. これまでの終端拘束条件では, ホラ
イズンの最後で状態が平衡点に到達することを拘束していたが, 平衡点の近傍の領域に入る
ことを要求する終端拘束集合によって, 閉ループシステムの安定性を保証することができる
ことを提案した. ただし, 一度, 状態が平衡点近傍の領域に入れば, コントローラをローカル
第 1 章 序論
6
な線形コントローラに切り換えている. この方法はデュアルモードとして知られている. 同
様の方法は, Sznaier ら [65] によっても提案されている.
その他に重要な方法として, Bitmead ら [11] の方法がある. 文献 [11] では, 拘束のない線
形システムの閉ループシステムを保証するために終端コスト関数を用いている. 終端に拘束
条件を課すことはなく, コントローラはオフラインで計算される. Rawlings ら [59] は, 入力
に拘束のある安定な線形システムについておこなった. 終端コスト関数として, 制御入力を
加えないで無限時間応答のコストを用いている. 異なった方法としては, 終端コスト関数に
加えてさらに終端拘束条件を用いる方法である. Parisini ら [54] や Chen ら [13] は非線形シ
ステムに対して適用しており, 2 次形式の終端コスト関数 ax(t + T )P x(t + T ) を用いてい
る. ここで, a > 0 であり P は正定行列である.
近年, Magni ら [42] や De Nicolao ら [48] は, それぞれ離散時間システム, 連続時間システ
ムに対してモデル予測制御の安定性を 2 次形式ではない終端コスト関数を用いて証明して
いる. この終端コスト関数は, もし, ローカルで安定なコントローラがホライズン後で適用
されたときのコストを表している. ローカルな線形コントローラは, ローカルな指数安定性
を保証しており, 線形コントローラの許容領域は初期時刻からホライズン後で到達できるく
らい十分大きいとしている. さらに, ホライズンの最後で状態は平衡点近傍に到達すること
ができることを仮定しているため, 状態の不等式拘束条件を課している.
非線形システムの大域的安定を保証するモデル予測制御の方法として Primbs ら [57, 58]
の研究がある. この方法では, 最初に大域的な control Lyapunov 関数 (Control Lyapunov
Function) [64] を見つけることによって大域的に安定な制御を実現する. ここで, control
Lyapunov 関数は入力のあるシステムに対する Lyapunov 関数である. 一度, 大域的な control
Lyapunov 関数が得られれば, 閉ループの安定性は control Lyapunov 関数の時間微分をト
ラジェクトリに沿っておこなった場合に負となるような状態の拘束と, control Lyapunov 関
数の値が control Lyapunov 関数から導かれるコントローラを用いた場合よりも大きくする
拘束条件を課すことにより保証される. この方法は, 大域的な安定性が終端拘束条件を加え
なくても保証されること示している. ただし, 大域的な control Lyapunov 関数を求める方
法は難しい. また, この方法では 2 つのステップに分けている. 最初のステップは, control
Lyapunov 関数を見つけることである. 次のステップは, モデル予測制御に control Lyapunov
関数を用いることである. そして, その手法を Caltech Ducted Fan と呼ばれる実験機に適
用している [76].
Control Lyapunov 関数を用いたモデル予測制御として Jadbabaie ら [26, 27] の研究があ
る. 特別なクラスの control Lyapunov 関数を用いることで, 非線形システムに対するモデル
予測制御の安定性を発展させている. これは, オフライン計算で得られる control Lyapunov
1.2. 従来研究
7
関数を終端コスト関数として用いることで, 終端拘束条件または終端不等式条件を課すこと
なく安定性を保証することを示している. このように, 終端に拘束条件を課さないために計
算時間を大幅に軽減することができるため, 実システムに対しても適用しやすくなる. 特に,
無限ホライズンのときにかかるコストを終端コスト関数を用いて, control Lyapunov 関数で
近似していることが特徴である. そして, その手法を Caltech Ducted Fan に適用している
[28].
さらに, 同様な手法として以下の 2 つがあげられる. Bhattacharya ら [10] は, F-16 Aircraft
に適用している. 特徴は, 非線形システムをスケジューリングパラメータを持つ線形シス
テムとして表し, control Lyapunov 関数に基づくコントローラを用いて, あらかじめシステ
ムを安定化してからモデル予測制御を用いている. また, Sznaier ら [66] は平衡点近傍まで
は, control Lyapunov 関数を終端コスト関数としたモデル予測制御を用いて, 平衡点近傍で
は control Lyapunov 関数に基づくコントローラに切り替えている. 上記で述べた Primbs,
Jadbabaie, Bhattacharya, Sznaier らの手法では, モデル予測制御で必要となる非線形最適
化問題と解くためのソフトウェアとして NPSOL [22] や RIOTS [61, 62] を用いている.
線形時変システムに対するロバストモデル予測制御 (Receding Horizon H∞ 制御)
線形時変システムに対するロバスト制御における研究では, 最大原理を用いた Tadmor
[67] の研究と LQ 微分ゲームを用いた Limebeer ら [41] の研究がある. また, Uchida ら [74]
は, H∞ 制御問題のなかで過渡状態の応答を考えるために有限時間の H∞ 制御問題を考えて
いる. このことにより, 外乱抑制問題だけでなく, 初期状態の不確かさについても考慮する
ことができている. また, 特徴として平方完成 [72] の基に議論されている.
さらに近年では, LMI を用いた線形時不変システムに対する H∞ 制御 [19, 52] を基に線
形時変システムに応用した研究として Dullerud ら [17, 18] の手法がある. この手法では,
linear operator inequalitis によって表される線形時変システムにより解を与えている. さら
に, 文献 [17] を拡張した研究として Pirie ら [55] は, 時変の摂動があるシステムに対する問
題を扱っている.
しかし, これまでの線形時変システムに対するロバスト制御では, ある有限区間でしか議
論されていないため, ある時間区間でしか実システムに適用することができない. そこで,
線形時変システムに対するロバスト制御をモデル予測制御に発展させることで, 有限区間
に固定しなくても安定性を保証するロバスト制御を実現することができる. 線形時変シス
テムに対するロバスト制御をモデル予測制御に発展させた制御をロバストモデル予測制御
(receding horizon H∞ 制御) と呼んでいる.
連続な線形時変システムに対するモデル予測制御を用いたロバスト制御では, はじめに
第 1 章 序論
8
Tadmor [68] がおこなった. 文献 [68] では, コントローラを構成するために必要となるリカッ
チ微分方程式の解に終端拘束条件を課している. この拘束条件は, 状態に x(t + T ) = 0 と同
様の拘束条件を課したことに等しい. また, 状態フィードバック, 出力フィードバックにつ
いて議論されている.
次に, Lall ら [39, 40] は, 2 次形式の終端コスト関数 xP (t)x を用いている. この P (t) はリ
カッチ微分不等式から得られる解であり, コントローラを構成するために必要となるリカッ
チ微分方程式の境界条件でもある. このリカッチ微分不等式を与えることは, ホライズン後
に状態がある領域に収まる拘束を課していることになる. 特徴として, 平方完成に基づいた
議論がされており, 状態フィードバック, 出力フィードバックについて議論されている.
さらに, Kim ら [34] は, Lall らの提案したリカッチ終端不等式条件を含んだ一般的なリ
カッチ終端不等式を提案している. そして, この条件の下で安定性を保証している. ただし,
状態フィードバックの場合においてのみ議論されている.
1.3
研究の目的
本研究では, 特別な非線形システムに対する理論的な安定性を保証したモデル予測制御を
考える. 従来研究では, 各時刻で解かなければならない最適制御問題に対して, 安定性を保
証するために終端拘束条件または終端コスト関数を用いている. そこで, 本研究では計算コ
ストの面から終端拘束条件よりも終端コスト関数を用いた最適制御問題を扱っていくこと
を考える. そこで, 特別なクラスの非線形システムに対して安定性を保証するモデル予測制
御を構築するために, 終端コスト関数の構成法について提案する. そして, その終端コスト
関数を用いたモデル予測制御により安定性を保証することができることを示す. 本研究で
は, 次の非線形システムについて考える.
• 線形時変システム
• 自己スケジューリングパラメータを持つ線形システム
• 受動性を有するロボットシステム
非線形システムを変化する平衡状態の周りで線形化すると線形時変システムとなる. そこ
で, 線形時変システムに対して安定性を保証するモデル予測制御を提案する. 特に, 終端コ
スト関数の構成法を提案する. また, 従来研究と比較して, より一般的な線形時変システム
に対して考えているため, 理論的にも進展しており, 実システムにも適用することが可能で
ある. さらに, 状態フィードバックだけでなく, 出力フィードバックを扱っているため, これ
1.4. 論文構成
9
までの条件を特殊な場合として含む終端コスト関数を構成するための条件を提案している.
従来研究との関連性としては, Uchida ら [74] を基に, Lall ら [39, 40] の条件を特殊な場合と
して含む研究となり, Kim ら [34] の研究を出力フィードバックに展開した研究である.
非線形システムの中には, 非線形システムをスケジューリングパラメータを持つ線形シス
テムとして記述することが可能なクラスがある. スケジューリングパラメータを持つ線形シ
ステムとすることで, 線形時不変システムよりも大域的なシステムの特性を表すことができ
る. しかし, 多くの場合にはスケジューリングパラメータがシステムの状態の 1 部であるこ
とが多い. このため, スケジューリングパラメータの許容領域が事前に分かっていないため,
理論的な保証が崩れる hidden loop 問題を考慮することが重要である. そこで, スケジュー
リングパラメータがシステムの状態の 1 部である自己スケジューリングパラメータを持つ
線形システムに対するモデル予測制御を考える. そして, hidden loop 問題を考慮した終端
コスト関数の構成法を提案する. この研究は, 文献 [5] の特別な場合をモデル予測制御に発
展させた位置づけとなっている. さらに, 飛行船システムを自己スケジューリングパラメー
タを持つ線形システムと表現することで, 実システムによる検証をおこなう.
受動性を有する非線形システムの 1 つとしてロボットシステムが知られている. 受動性を
有するロボットシステムでは, 解析的な Lyapunov 関数が得られている. そこで, ロボット
システムに対してモデル予測制御を考え, 解析的な Lyapunov 関数を終端コスト関数として
用いることで安定性を保証したモデル予測制御を提案する. さらに, SICE-DD アームと呼
ばれる標準的な Direct-Drive-Arm に対して, 提案したモデル予測制御を適用して検証をお
こなう.
1.4
論文構成
本論文の構成は次の通りである.
2 章では, 一般的な線形時変システムに対して出力フィードバックによるロバストモデル
予測制御を考える. 出力フィードバックコントローラを構成するためには, 2 本のリカッチ
微分方程式それぞれに対して終端不等式条件が必要となる. そこで, 従来研究において提案
されている終端不等式条件を特別な場合として含む 2 本の一般化終端不等式条件を提案す
る. そして, 一般化終端不等式条件を用いて構成される終端重み関数を用いたロバストモデ
ル予測制御問題に対して, コントローラを提案し, 閉ループ系の指数安定性と L2 ゲインに
関する有界実性を示す. 特に, 平方完成に基づくブロック対角行列を用いた手法が重要な役
割を果たしている. 最後に, 提案したロバストモデル予測制御を用いて数値例を示し, その
有効性を検証する.
10
第 1 章 序論
3 章では, 自己スケジューリングパラメータを持つ線形システムに対するモデル予測制御
を考える. 自己スケジューリングパラメータを持つ線形システムでは, スケジューリングパ
ラメータが非有界である hidden loop 問題 を考慮することが重要である. そこで, hidden
loop 問題を考慮した control Lyapunov 関数の構成法を提案する. そして, 提案する control
Lyapunov 関数を終端コスト関数として用いたモデル予測制御を用いてシステムの安定性を
示す. さらに, 飛行船システムに適用して, 定置制御のシミュレーションと実験をおこない
有効性を検証する.
4 章では, 受動性を有するロボットシステムに対するモデル予測制御を考える. 受動性を有
するロボットシステムでは, 解析的な Lyapunov 関数が提案されている. そこで, Lyapunov
関数をモデル予測制御の終端コスト関数として適用することを提案する. そして, ロボットシ
ステムの Lyapunov 関数を control Lyapunov 関数とするための条件を示す. そして, 受動性
に基づくロボット制御において従来研究で提案されている手法に対して, control Lyapunov
関数を終端重み関数としたモデル予測制御によりシステムの安定性を示す. さらに, 提案し
たモデル予測制御を SICE-DD アームに適用して, 定置制御と追従制御のシミュレーション
と実験をおこない有効性を検証する.
5 章では, 本研究についてまとめ, 今後の課題について述べる.
11
第 2章
線形時変システムのロバストモデル予測
制御
2.1
はじめに
本研究では, 安定性を保証する非線形システムのモデル予測制御を考える. そこで, 本章
では線形システムのシステム行列が時間に依存する線形時変システムを考える. この線形時
変システムは, 目標軌道の周りで制御対象である非線形システムを線形化することにより導
出される. 従来研究においても, 線形時変システムに対する安定性を保証したモデル予測制
御が考察されており [44], 安定性だけでなくロバスト性も考慮したロバストモデル予測制御
(receding horizon H∞ 制御) に関する研究 [34, 40, 68] もおこなわれている.
線形時変システムに対する出力フィードバックによるロバストモデル予測制御のコント
ローラは, 2 本のリカッチ微分方程式とその終端条件から求まる解を用いて構成される. 終
端条件は安定性と密接に関係するので, ロバストモデル予測制御では終端条件の決定方法に
ついて研究がおこなわれている. 従来研究では, 終端条件をゼロとする手法 [68] やそれを緩
和した終端不等式条件を用いる手法 [40] が提案されている. さらに, 文献 [34] ではこの終端
不等式条件を特別な場合として含む終端不等式条件を提案している. 一方, 文献 [40, 68] で
は状態フィードバックと出力フィードバックを扱っているが, 文献 [34] は状態フィードバッ
クのみを取り扱っている. また, これらの従来研究では対象システムに直交条件などが仮定
されており, 実システムに適用することが困難である.
本章では, 直交条件を仮定しない一般的な線形時変システムに対して, 出力フィードバッ
クによるロバストモデル予測制御問題について考える. 出力フィードバック問題において
は, 2 本のリカッチ微分方程式それぞれに対して終端不等式条件が必要となるが, 文献 [40]
において提案された終端不等式条件を特別な場合として含む 2 本の一般化終端不等式条件
第 2 章 線形時変システムのロバストモデル予測制御
12
を提案し, その性質を示す. 次に, 提案した一般化終端不等式条件を用いたロバストモデル
予測制御問題について考察し, コントローラの導出をおこない, 閉ループ系の指数安定性と
L2 ゲインに関する有界実性を示す. ここでは, 文献 [72, 74] で提案されたブロック対角行列
を用いた手法が重要な役割を果たしている. 最後に, 提案した一般化終端不等式条件を用い
て構成されるコントローラによる数値例を示し, その有効性を検証する.
本章は, 次のように構成されている. はじめに, 2 節ではロバストモデル予測制御問題が定
式化されている. 次に 3 節では, 本章で提案する一般化終端不等式条件を与え, その性質を
示す. そして, その条件を用いてロバストモデル予測制御によるコントローラを導出し, 閉
ループ系の安定性とその L2 ゲインの有界性を 4 節で示す. 5 節では例題を与え, 本章で提案
した一般化終端不等式条件の有効性を確認し, 最後に結論を述べる.
2.2
問題設定
本章では, t ∈ [0, ∞) において次式で定義される連続時間線形時変システム
ẋ(t) = A(t)x(t) + B1 (t)w(t) + B2 (t)u(t), x(0) = 0
z(t) = C1 (t)x(t) + D11 (t)w(t) + D12 (t)u(t)
(2.1)
y(t) = C2 (t)x(t) + D21 (t)w(t) + D22 (t)u(t)
を考える. ここで, x(t) ∈ Rn は状態, u(t) ∈ Rm2 は制御入力, y(t) ∈ Rp2 は観測出力,
w(t) ∈ Rm1 は外乱, z(t) ∈ Rp1 は被制御量とする. また, A(t) ∈ Rn×n , B1 (t) ∈ Rn×m1 ,
B2(t) ∈ Rn×m2 , C1 (t) ∈ Rp1 ×n , C2(t) ∈ Rp2 ×n , D11 (t) ∈ Rp1 ×m1 , D12 (t) ∈ Rp1 ×m2 , D21 (t) ∈
Rp2 ×m1 , D22 (t) ∈ Rp2 ×m2 は, t ∈ [0, ∞) において連続な時変行列であり, 次の仮定を満足す
るものとする. また, 本章では特に明示する必要がない場合は引数 t を省略する.
(A2.1) : (A, B2) は可安定, (C2 , A) は可検出である.
(A2.2) : (A, B1) は可制御, (C1 , A) は可観測である.
(A2.3) : D11 = 0 である.
(A2.4) : D22 = 0,
D12 =
0
I
および D21 =
0 I
である.
注意 2.1 仮定 (A2.1) は安定化コントローラが存在するために必要な条件であり, 仮定 (A2.2)
はコントローラを構成するために用いるリカッチ微分方程式の正定解が存在するための条件
2.3. 一般化終端不等式条件
13
である [73]. また, 一般的な H∞ 制御問題を微分ゲーム問題としてとらえた場合, 仮定 (A2.3)
により鞍点解の解釈が可能となる [78]. 仮定 (A2.4) は一般性を失うことがない条件である.
特に仮定 D22 = 0 の場合, D22 = 0 の場合に構成されるコントローラを K とすると, D22 を
用いることにより新たに K(I + D22 K) で構成される [23].
このシステム (2.1) 式に対して, 出力フィードバックによるロバストモデル予測制御問題
を考える. 本章で扱う出力フィードバックロバストモデル予測制御問題は, 各時刻 t におい
て以下の微分ゲーム問題の解となり, かつ閉ループ系の指数安定性と L2 ゲインが γ 以下と
なることを保証する出力フィードバックコントローラを求めることである.
inf
sup
u w,x(t−T )
0
2
−γ x(t − T0) H(t − T0 )x(t − T0)
t+T
+
z(s) z(s) − γ 2w(s) w(s) ds + x(t + T )F (t + T )x(t + T )
(2.2)
t−T0
ここで, t は現在時刻, T ≥ 0 は予測のホライズン, T0 ≥ 0 は推定のためのホライズンである.
また, t0 ∈ [−T0, 0] において x(t0) = 0 とすると, H(t − T0) > 0 (t ∈ [0, ∞)) は時刻 t − T0 に
おける状態の不確かさを表す重み行列, F (t + T ) > 0 (t ∈ [0, ∞)) は時刻 t + T における終
端コスト関数の重み行列を表している.
注意 2.2 文献 [40] においても同様な問題を考えている.
定義 2.1 L2 ノルム ( · 2)
2 乗可積分空間 L2 ノルムを表し, 次式で定義する.
x2 =
2.3
0
∞
1
2
x(t) dt
2
,
x ∈ L2
(2.3)
一般化終端不等式条件
本節では, ロバストモデル予測制御の研究において従来から用いられていた終端不等式条
件を特別な場合として含む一般化終端不等式条件を提案する.
終端不等式条件は, ロバストモデル予測制御において閉ループ系の安定性を保証するため
の重要な条件であり, 具体的には, コントローラを構成するために必要となるリカッチ微分
方程式の初期値を決定するための条件である. この終端不等式条件は, 時刻 t における微分
ゲーム問題 (2.2) 式の値を J ∗ とすると, 図 2.1 に示すように端点における状態のコストを決
定するための条件である.
第 2 章 線形時変システムのロバストモデル予測制御
14
−γ 2 x(t − T0) H(t − T0)x(t − T0)
x(t + T )F (t + T )x(t + T )
J∗
t − T0 t
t+T
図 2.1: Terminal cost funtion for the problem
ロバストモデル予測制御では, 各時刻で有限ホライズンのロバスト制御 (H∞ 制御) を適用
し, それを各時刻ごとに繰り返す. 本章では, 無限ホライズンの問題
∞
J1 =
z(s)z(s) − γ 2 w(s)w(s) ds
(2.4)
t
を有限ホライズンの問題として取り扱うために, 終端コスト関数が重要な役割を果たす. こ
れは, 以下のように考えれば理解できる. (2.4) 式を展開すると
t
J1 = −
(z(s) z(s) − γ 2w(s) w(s))ds
t−T0
t+T
+
2
(z(s) z(s) − γ w(s) w(s))ds +
t−T0
∞
(z(s)z(s) − γ 2 w(s)w(s))ds
(2.5)
t+T
が得られ, (2.5) 式の第 1 項は過去の状態のコストであり, 第 3 項を終端コストと考えれば,
各時刻で考える有限ホライズンの問題は次式で与えられる.
J2 = −γ 2x(t − T0) H(t − T0 )x(t − T0)
t+T
z(s)z(s) − γ 2 w(s)w(s) ds + x(t + T )F (t + T )x(t + T )
+
(2.6)
t−T0
ここで, J1 ≤ J2 のときには時刻 t + T 以降でシステムを安定化する際にかかるコストを考慮
しているために, 有限ホライズンを繰り返しておこなうモデル予測制御においてシステムを
安定化することができる. ただし, この終端コストを大きく見積もり過ぎると, 過大な入力
を用いてシステムを安定化しようとするために適切でない. よって, この終端コストを適切
に決定できれば, 安定性を保証することだけでなく, 適切な入力を与えることができる. さ
らに, 出力フィードバックロバストモデル予測制御の場合, 2 本のリカッチ微分方程式それ
ぞれに対する終端不等式条件が必要となることが重要である.
終端不等式条件を用いた従来研究では, コントローラの構成に用いるリカッチ微分方程式
に基づいた不等式条件が提案されている [40]. しかし, この条件が厳しいため, 条件を緩和
する必要がある. 以下では, 出力フィードバックロバストモデル予測制御において, 文献 [40]
で提案されている終端不等式条件を含む一般化終端不等式条件を提案する. はじめに, 1 本
目のリカッチ微分方程式に対する一般化終端不等式条件とその性質を示す.
2.3. 一般化終端不等式条件
15
定理 2.1 L(t) ∈ Rm2 ×n (t ∈ [0, ∞)) が与えられたとき, 次の一般化終端不等式条件を満た
す解 F (t) > 0 (t ∈ [0, ∞)) が存在すると仮定する.
Ḟ + F (A − B2 L) + (A − B2 L) F + γ −2 F B1B1 F + (C1 − D12L) (C1 − D12 L) ≤ 0
(2.7)
このとき, 区間 [t1, t2], 境界条件 M(t2 ) = F (t2) のもとで, 以下のリカッチ微分方程式
−1
−1
−Ṁ = M A − B2 (D12 D12 ) D12 C1 + A − B2 (D12D12 ) D12 C1 M
−1
−1
C1
D12 ) B2 − γ −2 B1 B1 M + C1 I − D12 (D12
D12 ) D12
−M B2 (D12
(2.8)
の解 M > 0 は次の条件を満たす.
M(t) ≤ F (t),
∀
t ∈ [t1, t2]
(2.9)
証明 不等式 (2.7) 式は次のように変形することができる.
−1
−1
Ḟ + F A − B2 (D12
D12 ) D12
C1 + A − B2 (D12
D12 ) D12
C1 F
−1
−1
−2
−F B2 (D12 D12 ) B2 − γ B1 B1 F + C1 I − D12 (D12 D12 ) D12 C1 ≤ −∆F
(2.10)
ここで, ∆F は次式で与えられる.
−1 ∆F = (D12
D12 ) L − (F B2 + C1 D12 ) (D12
D12 )
D12 ) L − (F B2 + C1 D12 )
(D12
(2.11)
はじめに, (2.8) 式を用いて関数 xMx の時間微分を区間 [t, t2] で積分すると, M(t2) = F (t2)
から
t2
x(t) M(t)x(t) = −
t
の関係が導出される. このとき,
d
ds
d (x Mx) ds + x(t2) F (t2)x(t2)
ds
(x Mx) ds は以下のように計算される.
(2.12)
第 2 章 線形時変システムのロバストモデル予測制御
16
d (x Mx) = ẋMx + x Ṁx + xMx
dt
= (Ax + B1 w + B2 u) Mx + xṀ x + x M (Ax + B1w + B2 u)
= xAMx + wB1 Mx + u B2 Mx + xṀx + x MAx + x MB1 w + xMB2 u
= x Ṁ + MA + AM x − γ 2 w − γ −2 B1 Mx w − γ −2 B1 Mx
+γ 2w w + γ −2 xMB1 B1 Mx − z z + z z + uB2 Mx + x MB2 u
= x Ṁ + MA + AM + γ −2 MB1 B1 M x + γ 2w w − z z
−γ 2 w − γ −2 B1 Mx w − γ −2 B1 Mx
+ (C1 x + D12 u) (C1x + D12 u) + uB2 Mx + x MB2 u
= x Ṁ + MA + AM + γ −2 MB1 B1 M x + γ 2w w − z z + xC1 C1x
−γ 2 w − γ −2 B1 Mx w − γ −2 B1 Mx
−1
D12 )
+ u + (D12D12 ) (D12 C1 + B2 M) x (D12
−1
· u + (D12
D12 ) (D12
C1 + B2 M) x
−1
C1 + B2 M) (D12
D12) (D12
C1 + B2 M) x
−x (D12
= x Ṁ + MA + AM + γ −2 MB1 B1 M + C1 C1
−1
− (D12
C1 + B2 M) (D12
D12 ) (D12
C1 + B2 M) x
+γ 2w w − z z − γ 2 w − γ −2 B1 Mx w − γ −2 B1 Mx
−1
+ u + (D12D12 ) (D12 C1 + B2 M) x (D12
D12 )
−1
D12 ) (D12
C1 + B2 M) x
· u + (D12
−1
−1
D12 ) D12
C1 + A − B2 (D12
D12 ) D12
C1 M
= x Ṁ + M A − B2 (D12
−1
−1
−2
−M B2 (D12 D12 ) B2 − γ B1 B1 M + C1 I − D12 (D12 D12 ) D12 C1 x
+γ 2w w − z z − γ 2 w − γ −2 B1 Mx w − γ −2 B1 Mx
−1
D12 )
+ u + (D12D12 ) (D12 C1 + B2 M) x (D12
−1
· u + (D12
D12 ) (D12
C1 + B2 M) x
(2.13)
ここで, リカッチ微分方程式 (2.8) 式, 最適な制御入力 u = − (D12
D12 )
−1
(D12
C1 + B2 M) x,
最悪外乱 w = γ −2 B1 Mx を用いて (2.12) 式を展開すると次式が導出される.
t2
z(s) z(s) − γ 2 w(s) w(s) ds + x(t2) F (t2)x(t2)
x(t) M(t)x(t) =
(2.14)
t
次に, 一般化終端不等式条件 (2.10) 式を用いて関数 xF x の時間微分を区間 [t, t2] で積分し,
2.3. 一般化終端不等式条件
17
−1
最適な制御入力 u = − (D12
D12 ) (D12
C1 + B2 F ) x, 最悪外乱 w = γ −2 B1 F x を用いると
t2
x(t) F (t)x(t) =
z(s) z(s) − γ 2 w(s) w(s) + x(s)∆F (s)x(s) ds + x(t2) F (t2)x(t2)
t
(2.15)
が導出される. よって, x∆F x ≥ 0 より任意の t ∈ [t1, t2] に対して, 次式の関係が成立する.
x(t)M(t)x(t) ≤ x(t)F (t)x(t)
(2.16)
ゆえに, 次の条件を満たす.
M(t) ≤ F (t),
∀
t ∈ [t1, t2]
(2.17)
✷
ここで, 定理 2.1 を 1 次元で解釈すると, 図 2.2 のように描くことができる. すなわち, 終
端不等式条件から求められた解をリカッチ微分方程式の終端条件としたとき, 逆時間に解く
リカッチ微分方程式の解のトラジェクトリは終端不等式条件の解のトラジェクトリで抑え
られている. また, F (t2) と M(t1 ) の関係を 2 次元で解釈するために x = [ x1 x2 ] とした
ときの関数 x(t1) M(t1)x(t1) と x(t2) F (t2)x(t2) をあるレベルで切ったときの断面は図 2.3 の
ように描くことができる. 図 2.3 は有限時間先において状態が収束する領域を与え, その領
域に収まるような現在時刻における状態の領域を与えている.
x2
x(t2)F (t2)x(t2)
F
0
M
t1
t2
t
図 2.2: Relation between M and F
x1
x(t1) M(t1 )x(t1)
図 2.3: Relation between M and F
注意 2.3 文献 [34] においても一般化終端不等式条件が提案されているが, 対象システムに
直交条件が仮定されている. しかし, 本章で対象とするシステムは直交条件を仮定していな
いため, 文献 [36] の平方完成を用いた直接的な手法を用い, 一般化終端不等式条件を文献 [34]
と同様の過程を経て導出している. よって, 本章で提案する一般化終端不等式条件 (2.7) 式
は, 文献 [34] で提案されている一般化終端不等式条件を一般化した条件である.
第 2 章 線形時変システムのロバストモデル予測制御
18
D12 )
さらに, 一般化終端不等式条件 (2.7) 式の L を L = (D12
−1
(B2 F + D12
C1) に置き換
えたとき
−1
−1
D12 ) D12
C1 + A − B2 (D12
D12 ) D12
C1 F
Ḟ + F A − B2 (D12
−1
−1
−2
−F B2 (D12 D12) B2 − γ B1B1 + C1 I − D12 (D12 D12 ) D12 C1 ≤ 0 (2.18)
が導かれる. この不等式 (2.18) 式は, 文献 [40] で提案されている条件であることから, 一般化
終端不等式条件 (2.7) 式は文献 [40] で提案されている条件を含んでいることがわかる. よっ
て, 本章で提案した一般化終端不等式条件は, 文献 [34, 40] の結果を拡張した条件である.
次に, 2 本目のリカッチ微分方程式に対する一般化終端不等式条件を示し, リカッチ微分方
程式と一般化終端不等式条件の間の関係を導出する. ここで, 以下で用いる新たな記号 M̃(t)
を定義する. 区間 [t1, t2], 境界条件 M(t2 ) = F (t2) であるリカッチ微分方程式 (2.8) 式の解を
M(t, t2, F (t2)) と表し M̃(t) := M(t, t2, F (t2)) と定義する.
定理 2.2 K(t) ∈ Rn×p2 (t ∈ [0, ∞)) が与えられたとき, 次の一般化終端不等式条件を満たす
解 G(t) > 0 (t ∈ [0, ∞)) が存在すると仮定する.
−Ġ + G A + γ −2 B1B1 M̃ + K C2 + γ −2 D21B1 M̃
+ A + γ −2 B1 B1 M̃ + K C2 + γ −2 D21 B1 M̃ G
−1
M̃ B2 + C1 D12 G
D12 )
+γ −2 G M̃B2 + C1D12 (D12
+ (B1 + KD21 ) (B1 + KD21 ) ≤ 0
(2.19)
このとき, 区間 [t1, t2], 境界条件 T (t1) = G(t1 ) のもとで, リカッチ微分方程式
−2
B1B1 M̃
B1 D21
−1
(D21 D21
)
−2
D21 B1 M̃
C2 + γ
Ṫ = T A + γ
−
−1
C2 + γ −2 D21B1 M̃ T
+ A + γ −2 B1 B1 M̃ − B1 D21
(D21 D21
)
−1
C2 + γ −2 D21 B1 M̃ (D21 D21
C2 + γ −2 D21 B1 M̃
)
−T
−1
−2
T
M̃B2 + C1D12 (D12 D12 )
M̃ B2 + C1 D12
−γ
−1
(D21D21
) D21 B1
+B1 I − D21
(2.20)
の解 T > 0 は次の条件を満たす.
T (t) ≤ G(t),
∀
t ∈ [t1, t2]
(2.21)
2.3. 一般化終端不等式条件
19
証明 一般化終端不等式条件 (2.19) 式から次式が導かれる.
−1
C2 + γ −2 D21 B1 M̃
(D21 D21
)
−Ġ + G A + γ −2 B1 B1 M̃ − B1 D21
−2
−1
−2
+ A + γ B1B1 M̃ − B1 D21 (D21 D21 )
C2 + γ D21 B1 M̃ G
−1
C2 + γ −2 D21 B1 M̃
)
−G C2 + γ −2 D21B1 M̃ (D21 D21
−1
−2
M̃B2 + C1 D12 (D12 D12)
M̃B2 + C1 D12
−γ
G
−1
(D21 D21
) D21 B1 ≤ −∆G
+B1 I − D21
(2.22)
ここで, ∆G は次式で与えられる.
−1
−2
−1
∆G = K + B1D21 (D21 D21 ) + G C2 + γ D21 B1M̃ (D21 D21 )
)
(D21 D21
−1
−2
−1
(2.23)
· K + B1D21 (D21D21 ) + G C2 + γ D21 B1 M̃ (D21D21 )
はじめに, システム (2.1) 式と最適なコントローラから構成する状態を xc とおく. そして,
M̃ と T , M̃ と G から PT , PG をそれぞれ次式のように与える.
M̃
0
M̃
0
, PG =
PT =
2 −1
2 −1
0 γ T
0 γ G
(2.24)
次に, 関数 xc PT xc , xc PG xc の時間微分を区間 [t1, t] で積分すると, 関数 xc PT xc , xc PG xc に関
してそれぞれ次の関係が導出される.
t
(−z(s) z(s) + γ 2 w(s) w(s))ds + xc (t1 )PG (t1 )xc (t1)
xc (t) PT (t)xc (t) =
xc (t)PG (t)xc (t) =
t
1t
t1
(2.25)
(−z(s) z(s) + γ 2 w(s) w(s) − xc G−1 ∆G G−1 xc )ds + xc (t1) PG (t1)xc (t1)
(2.26)
よって,
xc (t)PT (t)xc(t) ≥ xc (t) PG (t)xc(t)
(2.27)
PT (t) ≥ PG (t)
(2.28)
であることから
が導かれる. ここで, PT と PG は対角行列であり, PT と PG の成分 M̃ が同じであることから
T −1 ≥ G−1
(2.29)
第 2 章 線形時変システムのロバストモデル予測制御
20
である. ゆえに, 定理 2.1 と同様の議論から
T (t) ≤ G(t),
∀
t ∈ [t1, t2]
(2.30)
✷
を導くことができる.
注意 2.4 定理 2.2 の証明は, 次節の定理 2.3 で用いる平方完成の性質 [72, 74] を参考にする
とよい.
ここで, 定理 2.2 を 1 次元で解釈すると, 図 2.4 のように描くことができる. すなわち, 終
端不等式条件から求められた解をリカッチ微分方程式の初期条件としたとき, リカッチ微分
方程式の解のトラジェクトリは終端不等式条件の解のトラジェクトリで抑えられている. 2
次元での解釈は 2.4 節にて示す.
G
T
t1
t2
t
図 2.4: Relation between T and G
また, 一般化終端不等式条件 (2.19) 式において, K を B1D21
+ G C2 + γ −2 D21 B1 M̃ に
置き換えることによって次式が導出される.
−1
C2 + γ −2 D21 B1 M̃
(D21 D21
)
−Ġ + G A + γ −2 B1 B1 M̃ − B1 D21
−2
−1
−2
C2 + γ D21 B1 M̃ G
+ A + γ B1B1 M̃ − B1 D21 (D21 D21 )
−1
C2 + γ −2 D21 B1 M̃
)
−G C2 + γ −2 D21B1 M̃ (D21 D21
−1
−2
M̃B2 + C1 D12 (D12 D12)
M̃B2 + C1 D12
−γ
G
−1
(D21 D21
) D21 B1 ≤ 0
+B1 I − D21
(2.31)
この不等式条件は, 文献 [40] で提案されている条件である. したがって, 提案した一般化終
端不等式条件 (2.19) 式は, (2.31) 式を含んでいることがわかる. したがって, 提案した終端
不等式条件は文献 [40] の条件を拡張した条件である. なお, 文献 [34] では状態フィードバッ
ク問題のみを扱っているため, リカッチ微分方程式 (2.20) 式に対する一般化終端不等式条件
は考察されていない.
2.4. ロバストモデル予測制御の安定性
21
ロバストモデル予測制御の安定性
2.4
本節では, 2.3 節で提案した一般化終端不等式条件を用いてロバストモデル予測制御によ
る出力フィードバックコントローラを導出し, システム (2.1) 式と提案する出力フィードバッ
クコントローラからなる閉ループ系が指数安定であり, その L2 ゲインが γ 以下であること
を示す.
はじめに, 2 つの補題を示す. これらの証明は, 文献 [40] と同様であるため本章では簡単に
示す.
補題 2.1 区間 [t, t + T ] において, 各 t ≥ 0 に対して境界条件 M(t + T ) = F (t + T ) の偏微
分方程式
∂
M(t, t + T, F (t + T ))
∂t
−1
D12) D12
C1
= M(t, t + T, F (t + T )) A − B2 (D12
−1
+ A − B2 (D12
D12 ) D12
C1 M(t, t + T, F (t + T ))
−1
−M(t, t + T, F (t + T )) B2 (D12
D12 ) B2 − γ −2 B1 B1 M(t, t + T, F (t + T ))
−1
C1
D12 ) D12
(2.32)
+C1 I − D12 (D12
−
に対する有界な解 M(t, t + T, F (t + T )) > 0 は, 次の関係を満たす.
∂
M(t, t + T, F (t + T )) ≤ 0
∂(t + T )
(2.33)
ここで, 境界条件 F (t + T ) は t ∈ [0, ∞) に対して, (2.7) 式の有界な解 F (t + T ) > 0 で与え
られる.
証明 すべての区間 t3 ≥ t2 ≥ t1 ≥ 0 に対して, 偏微分方程式 (2.32) の解は以下の性質を持
つ [40].
(i) : M(t1 , t2, M(t2 , t3, F )) = M(t1, t3 , F )
(ii) : F > 0 =⇒ M(t1 , t2, F ) > 0
−1
D12) D12
C1 > 0 =⇒ M(t1, t2, F ) > 0
(iii) : C1 I − D12 (D12
(iv) : F1 ≥ F2 ≥ 0 =⇒ M(t1 , t2, F1) ≥ M(t1 , t2, F2 )
このとき, すべての t ≤ t3 に対して次の関係が成立する.
M(t, t3, F (t3)) ≤ F (t)
(2.34)
第 2 章 線形時変システムのロバストモデル予測制御
22
また, すべての t2 ≤ t3 において
M(t2 , t3, F (t3)) ≤ F (t2)
(2.35)
が成立する. ここで, 上記の性質 (iv) を適用すると次の関係が導かれる.
M(t1 , t2, M(t2 , t3, F (t3))) ≤ M(t1, t2, F (t2))
(2.36)
さらに, 上記の性質 (i) を用いると
M(t1, t3, F (t3)) ≤ M(t1 , t2, F (t2))
(2.37)
が得られる. これを図 2.5 に示す. したがって,
∂
M(t, t + T, F (t + T )) ≤ 0
∂(t + T )
(2.38)
✷
を満たす.
M(t1, t2 , F (t2))
M(t1 , t3, F (t3))
0
t1
t2
t3
t
図 2.5: Property of M
補題 2.2 区間 [t − T0, t + T ] において, 次式で定義する
M̂ := M(t, t + T, F (t + T ))
(2.39)
を用いて各 t ≥ 0 に対して境界条件 T (t − T0) = G(t − T0) の偏微分方程式
∂
−1
C2 + γ −2 D21 B1 M̂
(D21 D21
)
T̂ = T̂ A + γ −2 B1B1 M̂ − B1 D21
∂t
−1
C2 + γ −2 D21B1 M̂ T̂
+ A + γ −2 B1 B1 M̂ − B1 D21
(D21 D21
)
−2
−1
−2
C2 + γ D21 B1 M̂
−T̂
C2 + γ D21 B1 M̂ (D21 D21)
−1
−2
T̂
M̂B2 + C1D12 (D12 D12 )
M̂ B2 + C1 D12
−γ
−1
(D21D21
) D21 B1
+B1 I − D21
(2.40)
2.4. ロバストモデル予測制御の安定性
23
に対する有界な解 T̂ := T (t, t − T0, G(t − T0)) > 0 は, 次の関係を満たす.
∂
T̂ ≥ 0
∂(t − T0 )
(2.41)
ここで, 境界条件 G(t − T0 ) は, t ∈ [0, ∞) に対して (2.19) 式の有界な解 G(t) > 0 で与えら
れる.
証明 すべての区間 t3 ≤ t2 ≤ t1 ≥ 0 に対して, 偏微分方程式 (2.40) の解は以下の性質を持
つ [40].
(i) : T (t1, t2, T (t2, t3, G)) = T (t1, t3 , G)
(ii) : G > 0 =⇒ T (t1, t2, G) > 0
−1
(D21 D21
) D21 B1 > 0 =⇒ T (t1, t2, G) > 0
(iii) : B1 I − D21
(iv) : G1 ≥ G2 ≥ 0 =⇒ T (t1, t2, G1 ) ≥ T (t1, t2, G2 )
このとき, すべての t ≥ t3 に対して次の関係が成立する.
T (t, t3, G(t3 )) ≤ G(t)
(2.42)
T (t2, t3, G(t3 )) ≤ G(t2 )
(2.43)
また, すべての t2 ≥ t3 において
が成立する. ここで, 上記の性質 (iv) を適用すると次の関係が導かれる.
T (t1, t2, T (t2, t3, G(t3 ))) ≤ T (t1, t2, G(t2 ))
(2.44)
さらに, 上記の性質 (i) を用いると
T (t1, t3, G(t3 )) ≤ T (t1, t2, F (t2))
(2.45)
が得られる. これを図 2.6 に示す. したがって,
∂
T (t, t − T0 , G(t − T0 )) ≥ 0
∂(t − T0)
を満たす.
(2.46)
✷
上記で示した補題 2.1, 2.2 は, 予測または推定のための有限ホライズン T , T0 によるリカッ
チ微分方程式の解の性質が示されている. このような特性を用いることにより, 以下の主要
結果を導くことができる.
第 2 章 線形時変システムのロバストモデル予測制御
24
T (t1, t2, G(t2 ))
T (t1, t3 , G(t3))
−T0
t3
t2
t1
t
図 2.6: Property of T
定理 2.3 次の条件 (B2.1), (B2.2) を仮定する.
(B2.1) : 一般化終端不等式条件 (2.7) 式の有界な正定解によって与えられる F (t + T )
を境界条件とするリカッチ微分方程式 (2.8) 式の解 M̂ が区間 [t − T0 , t + T ] において
存在する.
(B2.2) : 一般化終端不等式条件 (2.19) 式の有界な正定解によって与えられる G(t − T0)
を境界条件とするリカッチ微分方程式 (2.20) 式の解 T̂ が区間 [t − T0, t] において存在
する.
このとき, システム (2.1) 式に対して次に示すモデル予測制御による出力フィードバッ
クコントローラ (2.47) 式が存在し, このコントローラは閉ループ系を指数安定にする.
x̂˙ = Âx̂ + B2 u + B̂ (y − C2x̂) ,
x̂(0) = 0
u = Ĉ x̂
(2.47)
ここで,
 = A + γ −2 B1 B1 M̂ − γ −2 B̂D21 B1 M̂
−2
−1
(D21 D21
)
B̂ = B1 D21 + T̂ C2 + γ D21 B1M̂
−1
D12 )
C1
B2 M̂ + D12
Ĉ = − (D12
(2.48)
(2.49)
(2.50)
である.
証明 w(t) = 0 のとき, 閉ループ系の状態を xc = [ x (x − x̂) ] と定義し, コントローラ
(2.47) 式とシステム (2.1) 式の閉ループ系を考える.
ẋc = Ac xc
(2.51)
2.4. ロバストモデル予測制御の安定性
ここで, Ac は以下で与えられる.
25
Ac =
A + B2 Ĉ
−B2Ĉ
A − Â
 − B̂C2
(2.52)
このとき, 補題 2.2 で定義されている M̂ および T̂ の時間微分が
∂ M̂
∂ M̂
dM̂
=
+
dt
∂t
∂(t + T )
(2.53)
dT̂
∂ T̂
∂ T̂
=
+
dt
∂t
∂(t − T0 )
(2.54)
で与えられる. M̂ は
dM̂
∂ M̂
∂ M̂
=
+
(2.55)
dt
∂t
∂(t + T )
−1
−1
˙
M̂ = −M̂ A − B2 (D12 D12 ) D12 C1 − A − B2 (D12 D12 ) D12C1 M̂
−1
−1
C1
+M̂ B2 (D12
D12 ) B2 − γ −2 B1B1 M̂ − C1 I − D12 (D12
D12 ) D12
+
∂ M̂
∂(t + T )
(2.56)
を満足することから次式が導出される.
−1
−1
˙
M̂ + M̂ A − B2 (D12
D12 ) D12
C1 + A − B2 (D12
D12 ) D12
C1 M̂
−1
−1
C1
D12) B2 − γ −2 B1 B1 M̂ + C1 I − D12 (D12
D12 ) D12
−M̂ B2 (D12
−
∂ M̂
=0
∂(t + T )
(2.57)
一方, T̂ に関して次式が導出される.
∂ T̂
∂ T̂
dT̂
=
+
dt
∂t
∂(t − T0)
˙
−1
(D21 D21
)
C2 + γ −2 D21 B1 M̂
T̂ = T̂ A + γ −2 B1 B1 M̂ − B1 D21
−2
−1
−2
C2 + γ D21 B1 M̂ T̂
+ A + γ B1 B1M̂ − B1D21 (D21 D21 )
−1
C2 + γ −2 D21 B1 M̂
)
C2 + γ −2 D21 B1 M̂ (D21 D21
−T̂
−1
−2
T̂
M̂ B2 + C1 D12 (D12 D12 )
M̂B2 + C1 D12
−γ
+B1 I −
D21
−1
(D21 D21
)
D21 B1 +
∂ T̂
∂(t − T0)
(2.58)
第 2 章 線形時変システムのロバストモデル予測制御
26
よって, T̂ は以下の関係を満たす.
˙
−2
−1
−2
−T̂ + A + γ B1B1 M̂ − B1D21 (D21 D21 )
C2 + γ D21 B1 M̂ T̂
(D21 D21 )−1 C2 + γ −2 D21B1 M̂
+T̂ A + γ −2 B1 B1 M̂ − B1 D21
−2
−1
−2
−T̂
C2 + γ D21 B1M̂ (D21 D21 )
C2 + γ D21 B1 M̂
−1
D12 )
M̂ B2 + C1D12 T̂
− γ −2 M̂B2 + C1 D12 (D12
∂
−1
(D21 D21
) D21 B1 +
+B1 I − D21
T̂ = 0
(2.59)
∂(t − T0)
ここで, 次の関数を定義する.
V (xc , t) = xc P̂c xc
ただし, xc , P̂c はそれぞれ
xc =
x
x − x̂
(2.60)
, P̂c =
M̂
0
0
γ 2T̂ −1
(2.61)
である. ここで, (2.61) 式で用いた P̂c は文献 [72, 74] で提案されているブロック対角行列で
あり, これをモデル予測制御に適用しているところに本手法の特徴がある. リカッチ微分方
程式の解 M̂ , T̂ は, F (t + T ) と G(t − T0) が有界であることおよび予測ホライズン T ≥ 0 と
推定ホライズン T0 ≥ 0 が有限であることから有界である. それゆえに, 各時刻 t ∈ [0, ∞)
ごとに α1 xc 2 ≤ V (x, t) ≤ α2 xc 2 を満たす正の定数 α1 > 0, α2 > 0 が存在する. また,
(2.60) 式をシステム (2.1) 式の解軌道に沿って時間微分し, (2.57) 式と (2.59) 式を用いると次
式が成立する.
˙
V̇ (xc , t) = ẋc P̂c xc + xc P̂c xc + xc P̂c ẋc
˙
= (Ac xc ) P̂c xc + xc P̂c xc + xc P̂c (Ac xc )
˙
= ẋc P̂c + Ac P̂c + P̂c Ac
∂
M̂
0
xc
< xc ∂(t+T )
∂
−1
T̂
0
∂(t−T0)
(2.62)
ここで, 補題 2.1, 2.2 を用いることにより, (2.62) 式は α3 > 0 を用いて
V̇ (xc , t) ≤ −α3 xc 2
(2.63)
と表すことができる. よって, 各時刻 t ∈ [0, ∞) において次の条件が満足される.
α1 I ≤ P̂c ≤ α2 I
(2.64)
˙
P̂c Ac + Ac P̂c + P̂c ≤ −α3I
(2.65)
2.4. ロバストモデル予測制御の安定性
27
よって, 文献 [32] より閉ループ系は指数安定である. なお, 本定理で保証される安定性は指
✷
数安定性であり, 一様指数安定性 [60] は保証されない.
注意 2.5 定理 2.1 と定理 2.2 から F と M̂, G と T̂ には, M̂ ≤ F , T̂ ≤ G の関係があること
がわかる. F と G は, 無限ホライズンで考える不等式条件の有界な解であり, 各 t ≥ 0 にお
いて上式が満足されるので, T と T0 が有限であれば M̂ と T̂ の有界性は保証される.
定理 2.3 では, システムの状態と推定誤差からなる関数 (2.60) 式を定義し, P̂c は対角行列
(2.61) 式で与えられていることから, 図 2.7, 2.8 のように関数 (2.60) 式を分けて考えること
ができる. すなわち, 図 2.7 は現在の状態の領域に対して, T 時間先の状態の領域がその中に
含まれることを示し, 図 2.8 は T0 時間前の状態に対して, 現在の状態の領域がその中に含ま
れることを示している. よって, x M̂x, (x − x̂)T̂ −1 (x − x̂) からなる関数を用いて安定性を
示すことができる.
x2
x2 − x̂2
x(t + T ) F (t + T )x(t + T )
x(t)T̂ −1 (t)x(t)
0
x1
0
x(t)M̂(t)x(t)
x1 − x̂1
x(t − T0) G−1 (t − T0)x(t − T0)
図 2.7: Relation between M̂ and F
図 2.8: Relation between T̂ −1 and G−1
次に, 定理 2.3 で提案したモデル予測制御による出力フィードバックコントローラがロバ
ストモデル予測制御の出力フィードバックコントローラであることを示す.
定理 2.4 システム (2.1) 式およびモデル予測制御による出力フィードバックコントローラ
(2.47) 式からなる閉ループ系の L2 ゲインは γ 以下である. すなわち, 次の条件を満足する.
z22 − γ 2w22 ≤ 0
(2.66)
証明 システム (2.1) 式, モデル予測制御による出力フィードバックコントローラ (2.47) 式
からなる閉ループ系を構成する.
ẋc = Acxc + Bc w
z = Cc x c
(2.67)
(2.68)
第 2 章 線形時変システムのロバストモデル予測制御
28
ここで, Ac , Bc , Cc は閉ループシステムのシステム行列であり, 以下で与えられる.
A + B2 Ĉ −B2Ĉ
Ac =
A − Â Â − B̂C2
B1
Bc =
B1 − B̂D21
Cc = C1 + D12 Ĉ −D12 Ĉ
(2.69)
(2.70)
(2.71)
このとき, 提案した正定行列 P̂c が次の条件を満たすことに注意する [72, 74].
˙
P̂c + P̂c Ac + Ac P̂c + γ −2 P̂c Bc Bc P̂c + Cc Cc
˙
−1
−1
M̂ + M̂ A − B2 (D12 D12 ) D12 C1 + A − B2 (D12 D12 ) D12 C1 M̂
D12 )−1 B2 − γ −2 B1 B1 M̂ + C1 I − D12 (D12
D12 )−1 D12
C1
−M̂ B2 (D12
=
0
0
˙ −1
−2
−1
−2
T̂ T̂ T̂ + A + γ B1 B1 M̂ − B1 D21 (D21 D21 )
C2 + γ D21 B1M̂ T̂
γ T̂
+T̂ A + γ −2 B1 B1 M̂ − B1 D21
(D21 D21)−1 C2 + γ −2 D21 B1 M̂
−1
−2
−2
−T̂
C2 + γ D21 B1 M̂ (D21 D21 )
C2 + γ D21 B1 M̂
−1
−2
M̂B2 + C1D12 (D12 D12 )
M̂ B2 + C1 D12 T̂
−γ
−1
−1
+B1 I − D21 (D21 D21 ) D21 B1 T̂
∂ M̂
0
∂(t+T )
=
(2.72)
˙
˙
∂ T̂
−1
T̂
0
γ 2 T̂ −1 T̂ T̂ −1 T̂ + T̂ − ∂(t−T
0)
2
−1
ここで, 以下の関係が成立することに注意する.
˙
˙
T̂ T̂ −1 T̂ + T̂ = 0
= dtd T̂ −1T̂ T̂ −1
∵ =⇒ T̂˙ −1 = T̂˙ −1 + T̂ −1 T̂˙ T̂ −1 + T̂˙ −1
˙
˙
=⇒ T̂ −1 + T̂ −1 T̂ T̂ −1 = 0
d −1
T̂
dt
(2.73)
2.4. ロバストモデル予測制御の安定性
よって, 正定行列 P̂c が以下の条件を満足する.
29
˙
P̂c + P̂c Ac + Ac P̂c + γ −2 P̂c Bc Bc P̂c + Cc Cc =
∂
M̂
∂(t+T )
0
0
∂ T̂
T̂ −1
−γ 2T̂ −1 ∂(t−T
0)
≤0
(2.74)
このとき, 次の条件が導出される.
∞ d
2 xc P̂c xc + z z − γ w w dt
dt
0
∞
˙
ẋc P̂c xc + xc P̂c xc + xc P̂c ẋc + z z − γ 2w w dt
=
0 ∞ ˙
2 =
(Ac xc + Bc w) P̂c xc + xc P̂c xc + xc P̂c (Ac xc + Bc w) + (Cc xc ) (Cc xc ) − γ w w dt
0 ∞ ˙
2 =
xc P̂c + P̂c Ac + Ac P̂c + Cc Cc xc − γ w w + w Bc P̂c xc + xc P̂c Bc w
0 ∞ ˙
=
xc P̂c + P̂c Ac + Ac P̂c + Cc Cc xc
0
2
−2 −2 −2 w − γ Bc P̂c xc + γ xc P̂c Bc Bc P̂c xc dt
−γ w − γ Bc P̂c xc
∞ ˙
xc P̂c + P̂c Ac + Ac P̂c + γ −2 P̂c Bc Bc P̂c + Cc Cc xc
=
0
2
−2 −2 −γ w − γ Bc P̂c xc
w − γ Bc P̂c xc
dt
(2.75)
(2.75) 式は L2 ノルムを用いると次のように変形される.
−xc (0) P̂c (0)xc (0) + z22 − γ 2 w22
2 ∞
≤ −γ 2 w − γ −2 Bc P̂c xc +
xc
2
0
∂
M̂
∂(t+T )
0
0
∂ T̂
T̂ −1
−γ 2T̂ −1 ∂(t−T
0)
xc dt
(2.76)
ここで, xc (0) = 0 である. したがって, (2.74) 式から次の条件が導出される.
z22 − γ 2w22 ≤ 0
(2.77)
✷
定理 2.3 においても, (2.74) 式のような対角行列により, (2.74) 式が成立していることに注
意する. このように, 閉ループシステムの安定性および L2 ゲインの有界性に関しても, 本章
で示す対角行列 P̂c を用いて示すことができている.
本章では, 一般化終端不等式条件を提案し, 提案した一般化終端不等式条件を用いたロバ
ストモデル予測制御による出力フィードバックコントローラを導出して閉ループシステム
の安定性と有界実性を示したが, 改めて一般化終端不等式条件の解釈を与える. 定理 2.1 で
第 2 章 線形時変システムのロバストモデル予測制御
30
提案した一般化終端不等式条件 (2.7) 式の L を L = B2 F + D12
C1 に置き換えたときに従来
の結果に一致することを示した. このことは, 出力フィードバックコントローラ (2.47) 式の
フィードバックゲイン Ĉ と等しいことから, フィードバックゲインが存在する範囲を拡大し
ていると理解することができる. また, K を B1 D21
+ G C2 + γ −2 D21 B1 M̂ に置き換えた
とき, 従来の結果に一致することを示した. このことは, 出力フィードバックコントローラ
(2.47) 式の推定誤差のフィードバックゲイン B̂ と等しいことから, 推定誤差のフィードバッ
クゲインが存在する範囲を拡大していると理解することができる.
2.5
例題
本節では, 提案した手法を用いることによりその有効性を示す. (2.1) 式で表される連続時
間線形時変システムを考え, 各システム行列は以下で与えられるとする [1].
0 1 + 0.5 sin t
1 + 0.1 cos t
, B2 (t) =
A(t) =
−2
−3
0
0.1 + 0.03e−t 0
1 0
, C1 =
B1 (t) =
1
0
0 1
0
C2 = [ 1 0 ], D12 = , D21 = [ 0 1 ]
1
(2.78)
定理 2.3 を用いて, ロバストモデル予測制御による出力フィードバックコントローラを構
成する. このとき, 設計パラメータ L, K はそれぞれ L = [ 0.1 0.1 ], K = [ 0 0 ] とした.
計算手順を以下に示す.
[step 1] : システム行列 A, B1, B2 を時間に依存する項としない項に分ける.
B1 = B10 + e−t · B11
A = A0 + sin t · A1,
B2 = B20 + cos t · B21
ここで,
A0 =
B11 =
である.
0
1
−2 −3
0.03 0
0
0
, A1 =
, B20
(2.79)
0 0.5
, B10 =
0.1 0
0 0
1
1
0.1
= , B21 =
0
0
0
2.5. 例題
31
[step 2] : 求める一般化不等式条件の解 F , G の形式をそれぞれ F = F0 + e−t F1,
G = G0 + e−t G1 と与える.
[step 3] : 一般化終端不等式条件 (2.7) 式, (2.19) 式を線形行列不等式 (Linear Matrix
Inequality: LMI) に変形する. そして, 時変のパラメータ sin t, cos t, e−t の上下限値を
考慮することにより, 有限個の LMI として解く手法 [4, 6] を用いて, (2.7) 式の解を求
める.
[step 4] : 求めた F を用いてリカッチ微分方程式 (2.8) 式の解 M̂(t) を求める.
[step 5] : M̂(t) を用いて一般化終端不等式条件 (2.19) 式を解き, 求まった G を用いて
リカッチ微分方程式に対する解 T̂ (t) を求める.
[step 6] : M̂(t), T̂ (t) を用いて (2.47) 式より出力フィードバックコントローラを構成
する.
[step 7] : [step 4]∼[step 6] を, 各時刻ごとに繰り返す.
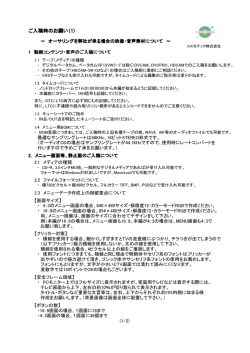
本章では, 時刻 t = 1 において大きさが 1, 時間幅 0.1 [s] のパルス状の外乱 w1 を加えた場
合の応答を確認した. このとき得られたシミュレーション結果を図 2.9–2.12 に描く.
図 2.9 では, γ の値を γ = 0.9, γ = 1.5, γ = 1.9 とした場合の外乱応答をそれぞれ実線, 破
線, 鎖線で示す. 図 2.9 より, 外乱抑制が達成されていることを確認することができる. また,
制御入力 u では γ による応答の違いを確認することができる. しかし, 状態 x1, x2 について
は, γ の変化により違いはあるものの, 大きな変化は見られなかった.
図 2.10 は, 予測ホライズン T の値を T = 0.1 [s], T = 0.05 [s], T = 0.15 [s] とした場合の
外乱応答をそれぞれ実線, 破線, 鎖線で示す. 図 2.11 は, 推定ホライズン T0 の値を T0 = 0.1
[s], T0 = 0.05 [s], T0 = 0.15 [s] とした場合の外乱応答をそれぞれ実線, 破線, 鎖線で示す. 図
2.12 は, 予測ホライズン T と推定ホライズン T0 の値を T = T0 = 0.1 [s], T = T0 = 0.05 [s],
T = T0 = 0.15 [s] とした場合の外乱応答をそれぞれ実線, 破線, 鎖線で示す. 図 2.10-2.12 よ
り, 外乱抑制が達成されていることを確認することができる. また, Tf , T0 が短い方が外乱
抑制についてはよい性能を持つことが, 制御入力 u において確認することができる.
シミュレーション結果から, 本章で提案した一般化終端不等式条件を用いたコントローラ
(2.47) 式によって閉ループシステムの安定性と外乱抑制が達成されていることを確認するこ
とができる. また, 予測または推定ホライズンが短い方が外乱抑制に関する性能はよいこと
が確認できる.
第 2 章 線形時変システムのロバストモデル予測制御
32
0.06
0.1
0.08
0.06
x2
x1
0.04
0.02
0.04
0.02
0
0
−0.02
−0.02
0 1 2
4
6
8
−0.04
0 1 2
10
4
t [s]
1.5
x 10
8
10
−3
0.1
0.08
1
0.06
x2
0.5
u
6
t [s]
0
−0.5
0.02
0
−1
−1.5
0 1 2
0.04
−0.02
4
6
t [s]
8
10
−0.04
−0.02
0
0.02
0.04
0.06
x1
図 2.9: Responce to the disturbance (solid: γ = 0.9, dashed: γ = 1.5, dot-dashed: γ = 1.9)
2.5. 例題
33
0.06
0.1
0.08
0.06
x2
x1
0.04
0.02
0.04
0.02
0
0
−0.02
−0.02
0 1 2
4
6
8
−0.04
0 1 2
10
4
t [s]
1.5
x 10
8
10
t [s]
−3
0.1
0.08
1
0.06
x2
0.5
u
6
0
−0.5
0.02
0
−1
−1.5
0 1 2
0.04
−0.02
4
6
t [s]
8
10
−0.04
−0.02
0
0.02
0.04
0.06
x1
図 2.10: Responce to the disturbance (solid: T = 0.1 [s], dashed: T = 0.05 [s], dot-dashed:
T = 0.15 [s])
第 2 章 線形時変システムのロバストモデル予測制御
34
0.06
0.1
0.08
0.06
x2
x1
0.04
0.02
0.04
0.02
0
0
−0.02
−0.02
0 1 2
4
6
8
−0.04
0 1 2
10
4
t [s]
1.5
x 10
8
10
t [s]
−3
0.1
0.08
1
0.06
x2
0.5
u
6
0
−0.5
0.02
0
−1
−1.5
0 1 2
0.04
−0.02
4
6
t [s]
8
10
−0.04
−0.02
0
0.02
0.04
0.06
x1
図 2.11: Responce to the disturbance (solid: T0 = 0.1 [s], dashed: T0 = 0.05 [s], dot-dashed:
T0 = 0.15 [s])
2.5. 例題
35
0.06
0.1
0.08
0.06
x2
x1
0.04
0.02
0.04
0.02
0
0
−0.02
−0.02
0 1 2
4
6
8
−0.04
0 1 2
10
4
t [s]
1.5
x 10
8
10
t [s]
−3
0.1
0.08
1
0.06
x2
0.5
u
6
0
−0.5
0.02
0
−1
−1.5
0 1 2
0.04
−0.02
4
6
t [s]
8
10
−0.04
−0.02
0
0.02
0.04
0.06
x1
図 2.12: Responce to the disturbance (solid: T = T0 = 0.1 [s], dashed: T = T0 = 0.05 [s],
dot-dashed: T = T0 = 0.15 [s])
第 2 章 線形時変システムのロバストモデル予測制御
36
なお, 本章で扱うことができるシステムは, sin(t), cos(t), e−t のような有界で十分に滑ら
かな時変系に限られることはない. しかし, 数値例の一般化終端不等式条件を解く際に有限
個の LMI として解く手法を適用しているため, 有界な関数でないと有限個の LMI として解
くことができない. 有限個の LMI として解く手法は, スケジューリングパラメータを持つ線
形システムに対する研究で用いられた手法であり, パラメータが有界な線形時変システムで
は有限個の LMI として解くことが可能である. また, 本章で取り扱った数値例は, 時不変 +
時変パラメータ変動を有するシステムとみなすこともできる. そこで, 以下に示すようにシ
ステムパラメータを考慮すると, 文献 [33] の手法に基づいてコントローラを設計することが
可能である.
A(t) =
B2 (t) =
B1 (t) =
0
1
+ ∆(t)
0 0.5
−2 −3
0 0
1
0.1
+ ∆(t)
0
0
0.115 0
0.015 0
+ ∆(t)
1
0
0
0
(2.80)
(2.81)
(2.82)
|∆(t)| ≤ 1
しかし, 文献 [33] に基づいた手法では, γ = 0.9 においてコントローラを求めることができな
かった. このことから, 本節で取り扱った線形時変システムに対しては本提案手法は有効で
あることがわかる.
注意 2.6 本章で提案した一般化終端不等式条件にはパラメータ L と K が含まれているが,
L と K は構成されるコントローラの性能に大きく影響するために設定に注意する必要があ
る. なお, L と K の最適(もしくは準最適)な設定方法については今後の課題である.
注意 2.7 本章では, LMI を用いることにより一般化終端不等式条件の解を求めている. し
かし, 文献 [40] で提案されている終端不等式条件 (2.18) 式, (2.31) 式の場合, F −1 , G−1 を考
慮して解くために, [step2] で示したような LMI を用いた手法を適用できなく, その計算が困
難である. よって, 計算の容易性の観点からも本稿で提案した一般化終端不等式条件は有効
である.
2.6. おわりに
2.6
37
おわりに
本章では, 直交条件を仮定しない線形時変システムに対して出力フィードバックによるロ
バストモデル予測制御問題を考察した. はじめに, ロバストモデル予測制御では, 安定性を
保証するために重要な役割を果たす一般化終端不等式条件を提案した. そして, 提案した一
般化終端不等式条件を用いたロバストモデル予測制御により出力フィードバックコントロー
ラを提案し, 閉ループ系の安定性とその L2 ゲインが有界であることが保証されることを示
した. 最後に, 提案した手法を用いた設計例を示し, その有効性を示した.
問題点は, 設計パラメータである L と K, 予測ホライズン T , 推定ホライズン T0 の設計が
系統的にできないことである. また, これらの設計パラメータによる制御系の安定性と性能
に関する影響についても考えなくてはならない. さらに, オンライン計算でコントローラを
構成するための計算時間がかかるため, 計算時間の低減が必要である.
38
第 3 章 自己スケジューリングパラメータを持つ線形システムのモデル予測制御
第 3章
自己スケジューリングパラメータを持つ線
形システムのモデル予測制御
3.1
はじめに
本研究では, 安定性を保証する非線形システムのモデル予測制御を考える. そこで, 本章
では, 自己スケジューリングパラメータを持つ線形システムを考える. 自己スケジューリン
グパラメータを持つ線形システムとは, 線形システムのように表現できるシステム行列の中
に変化するパラメータが含まれており, そのパラメータはシステムの状態の 1 部であるとい
う特別な非線形システムである. 図 3.1 は, スケジューリングパラメータを持つ線形システ
ムを表している. スケジューリングパラメータが外部から発生していることに注意する. 一
方, 図 3.2 は, 自己スケジューリングパラメータを持つ線形システムを表している. このよう
に自己スケジューリングパラメータを持つ場合は, スケジューリングパラメータが非有界で
あるため hidden loop 問題を考慮しなければならない.
Scheduling Parameter
Scheduling
Parameter
Plant
Plant
図 3.1: System with the scheduling pa- 図 3.2: System with the self-scheduling
rameter
parameter
従来研究では, hidden loop 問題を考慮したモデル予測制御の研究はおこなわれていない
が, 安定性についての研究はおこなわれている. 最初の手法は, 終端拘束条件を用いる方法
である [43]. しかし, 終端拘束条件は最適制御問題を解く際に非常に複雑になることから, 終
3.1. はじめに
39
端コスト関数を用いた手法が提案され, 終端コスト関数を用いた有限時間最適制御問題を考
えている [48]. また, 最近では control Lyapunov 関数を終端コスト関数として用いる手法が
提案されている. この手法の利点は, LMI を解くことで容易に終端コスト関数を設計するこ
と, 終端拘束条件を用いた最適制御問題と比較して計算量が軽減されることである. 終端コ
スト関数を control Lyapunov 関数としたモデル予測制御は, 航空機のような高速なダイナ
ミクスを持つ非線形システムに適用されている [10, 28, 66].
本章では, 自己スケジューリングパラメータを持つ線形システムに対するモデル予測制御
を考える. そこで, hidden loop 問題を考慮した control Lyapunov 関数の構成法を提案する.
そして, 提案する control Lyapunov 関数を終端コスト関数として用いたモデル予測制御を
用いてシステムの安定性を示す. さらに, 提案する安定性を保証したモデル予測制御を飛行
船に適用する.
飛行船は, ホバーリングを容易におこなうことができ, 燃料の節約, 騒音がないなどの利
点があるため, 近年, 無人の飛行船を用いて広告や大気の解析, 環境の観察などに用いられ
ている. また, さらには成層圏プラットフォーム計画では無人飛行船を用いて高速の通信,
環境や交通量, 自然災害などのリモートセンシングに用いられることが進んでいる. 無人飛
行船システムを構築するためには, 飛行船の位置と姿勢を正確に得ることが重要である. 本
章では, 室内での実験環境を考えるためにカメラを用いて飛行船の位置を観測する. 本章で
考える無人飛行船システムを図 3.3 に描く. このように視覚情報をフィードバックする視覚
フィードバックを用いている [25]. 視覚フィードバックに関する最近の研究では, 手先にカ
メラが取り付けられたロボット [30] や飛行船にカメラを搭載したシステムなどがある [77].
はじめに, 提案する飛行船システムは自己スケジューリングパラメータを持つ線形システム
として表す. 次にそのシステムに対して control Lyapunov 関数を構成する. そして, control
Lyapunov 関数を終端コスト関数として用いたモデル予測制御を用いて, 定置制御のシミュ
レーションをおこない, その特徴について考察する. 最後に実験結果を示す.
本章の構成は以下のようである. 2 節では問題設定をおこなう. 3 節では, 安定性を保証す
る control Lyapunov 関数の設計方法を提案し, 提案する control Lyapunov 関数を用いたモ
デル予測制御の安定性を示す. 4 節では, 飛行船システムを自己スケジューリングパラメー
タを持つ線形システムとして表す. 5 節では, 飛行船システムに対する control Lyapunov 関
数の構成方法について示し, シミュレーション結果についてまとめる. 6 節では, 実験環境に
ついて説明し, 実験結果についてまとめる. 最後に結論を述べる.
第 3 章 自己スケジューリングパラメータを持つ線形システムのモデル予測制御
40
Camera
Image
Blimp
図 3.3: Unmanned blimp system
3.2
問題設定
本章では, 次式で定義される自己スケジューリングパラメータを持つ線形システム
ẋ = A(θx(x))x + B(θx(x))u
θx (x) = hx
(3.1)
を考える. ここで, x ∈ Rn , u ∈ Rm , h ∈ R1×n はそれぞれ状態, 制御入力, 定数行列を表す.
自己スケジューリングパラメータ θx は, 状態 x の線形結合で与えられるので hx はスカラー
である. また, 行列 A(θx(x)), B(θx(x)) は次のように与えられる.
A(θx(x)) = A0 + a1(θx (x))A1 + · · · + ara (θx (x))Ara
B(θx(x)) = B0 + b1 (θx(x))B1 + · · · + brb (θx (x))Brb
(3.2)
ここで, ai , bj : R → R (i = 1, · · · , ra , j = 1, · · · , rb ) は連続な関数であり, Ai, Bi は定数行
列である.
システム (3.1) 式に対して, モデル予測制御問題を考える. 現在時刻 t, 状態 x(t) における
制御入力は, 時間区間 [t, t + T ] で下記を満たす最適な制御入力列をオンラインでもとめ, そ
の中で最初の制御入力のみを用いる.
t+T
(x(τ )Qx(τ ) + u(τ )Ru(τ )) dτ + V (x(t + T ))
min
u(·)
(3.3)
t
ここで, t は現在時刻, T > 0 は予測ホライズン, Q と R は重み行列, V (x(t + T )) はホライ
ズンの最後の時刻における終端コスト関数を表す. 結果として得られた制御入力は, 新しい
3.3. モデル予測制御の安定性
41
状態に更新されるまで入力される. これらを繰り返すことによりフィードバック制御のよう
になる.
また, 本章で用いる control Lyapunov 関数の定義は次のように与えられる.
定義 3.2 Control Lyapunov 関数
C 1 かつ正定な関数 V : Rn → R+ が次式を満たす
inf V̇ (x, u) + x Qx + u Ru ≤ 0
(3.4)
u
3.3
モデル予測制御の安定性
終端コスト関数を用いたモデル予測制御問題に対して, 終端コスト関数の設計法は非常に
重要である. なぜなら, 安定性は適当な終端コスト関数を用いた場合に保証されるからであ
る [44]. 近年, control Lyapunov 関数が終端コスト関数として用いられている. 非線形システ
ムに対して control Lyapunov 関数を構成する方法は, 文献 [76] に示されており, Quasi-LPV
法が知られている. quasi-LPV 法は, 非線形システムをスケジューリングパラメータをもつ
線形システムとして近似する方法である. 文献 [10, 28, 66] では, control Lyapunov 関数は
quasi-LPV 法を用いて構成されている.
ここで, 本章で考える自己スケジューリングパラメータを持つ線形システムは quasi-LPV
表現に近いことに注意する. しかし, 自己スケジューリングパラメータを持つ線形システム
に対して, 従来研究と同様に文献 [75] に基づいた quasi-LPV 法を適用することは難しい. な
ぜなら, 状態の関数は非有界であるからである. それゆえに, 自己スケジューリングパラメー
タを持つ線形システムに対する control Lyapunov 関数の設計手法を提案する.
定理 3.5 Pu > 0 が与えられたとき, 次の不等式条件
A(θx)P (θx ) + P (θx )A(θx)
W (θx) R1/2 P (θx )Q1/2
+B(θx )W (θx) + W (θx ) B(θx)
R1/2W (θx )
−I
0
0
−I
Q1/2P (θx )
P (θx ) W (θx)
W (θx)
Pu
∀
<0
(3.5)
>0
(3.6)
x ∈ {x|xP (θx )−1 x ≤ c}
を満たす正定対称行列 P (θx ), 行列 W (θx) が存在するならば, 次の状態フィードバックを用
第 3 章 自己スケジューリングパラメータを持つ線形システムのモデル予測制御
42
いた閉ループシステムは安定である.
u(t) = W (θx)P (θx )−1 x
(3.7)
ここで, 制御入力は次の条件を満たす.
U = {u|uPu−1 u ≤ c}
(3.8)
証明 正定関数 V を control Lyapunov 関数と仮定して, 次式のようにおく.
V = xP (θx )−1 x
(3.9)
正定関数 (3.9) 式をシステムと制御入力 (3.7) からなる閉ループ系にそって時間微分したと
き, 評価関数 (3.3) 式のコスト関数から以下の関係が導出される.
V̇ + xQx + u Ru = ẋP −1 x + x P −1 ẋ + xQx + uRu
= (Ax + Bu) P −1 x + x P −1 (Ax + Bu) + x Qx + uRu
= xAP −1 x + u B P −1 x + x P −1 Ax + x P −1 Bu + x Qx + u Ru
= xAP −1 x + W P −1 x B P −1 x + x P −1 Ax + x P −1 B W P −1 x
+xQx + W P −1 x R W P −1 x
= xP −1 (AP + P A + BW + W B + W RW + P QP ) P −1 x
(3.10)
また, AP + P A + BW + W B + W RW + P QP は, LMI 条件 (3.5) を用いると以下の関係
を満たす.
AP + P A + BW + W B + W RW + P QP
1/2
−I 0
R W
= (AP + P A + BW + W B ) − W R1/2 P Q1/2
1/2
Q P
0 −I
−1
1/2
−I 0
R W
= (AP + P A + BW + W B ) − W R1/2 P Q1/2
Q1/2P
0 −I
1/2
1/2
PQ
AP + P A + BW + W B W R
1/2
=
(3.11)
<0
R W
−I
0
0
−I
Q1/2P
よって, 以下の条件を満たす.
V̇ + x Qx + u Ru < 0
(3.12)
3.3. モデル予測制御の安定性
43
また, P は正定対称行列であるから V > 0 である.
一方, LMI 条件 (3.6) を用いることにより, 次の条件が得られる.
P W
>0
W Pu
P − W Pu−1 W > 0
P −1 P P −1 − P −1 W Pu−1 W P −1 > 0
x P −1 x − x P −1 W Pu−1 W P −1 x > 0
xP −1 x − u Pu−1 u > 0
(3.13)
よって, 以下の関係を満たす.
c ≥ x P −1 x > uPu−1 u
(3.14)
ゆえに, 閉ループシステムは次の許容領域に対して安定である.
X = {x|xX −1 x ≤ c}
(3.15)
✷
注意 3.8 定理 3.5 の LMI 条件において, スケジューリングパラメータの微分値は考慮され
ていない. もし, スケジューリングパラメータの微分値を考慮する control Lyapunov 関数
を構成するならば, スケジューリングパラメータの微 分値に関する許容領域を考慮しなけ
ればならない. なぜなら, スケジューリングパラメータの微分値は制御入力に依存するから
である.
定理 3.5 から, LMI 条件 (3.5), (3.6) の解を用いて control Lyapunov 関数は次のように構
成される.
V (θx (x(t + T ))) = x(t + T )P (θx(x(t + T )))−1x(t + T )
(3.16)
このとき, control Lyapunov 関数 (3.16) を用いて, モデル予測制御の安定性を保証するこ
とができる. 安定性について以下の定理が成立する.
定理 3.6 (3.3) 式の評価関数に対して, (3.16) 式で与えた終端コスト関数 V (x(t + T )) を用
いたモデル予測制御を考える. このとき, システムの平衡状態は安定である.
証明 J ∗ が (3.3) 式の最適解であるとする. そこで, J ∗ が control Lyapunov 関数とみなす
ことができることで安定性を示す [27]. 区間 [t, t + T + δ] で準最適な制御則を以下のように
第 3 章 自己スケジューリングパラメータを持つ線形システムのモデル予測制御
44
与える.
ũ := u∗[t,t+T ] + uk[t+T ,t+T +δ]
(3.17)
J ∗ と J において次のような関係が導かれる.
t+T
∗
∗
x Qx∗ + u∗ Ru∗ dτ + V (x∗(t + T ))
J (t) =
t
t+δ
t+T +δ ∗
∗
∗
∗
xk Qxk + uk Ruk dτ
=
x Qx + u Ru dτ + J (t + δ) −
t
t+T
∗
+V (x (t + T )) − V (x (t + T + δ))
k
(3.18)
最適値の特性 J ∗ ≤ J から, 最適値を J で置き換えて, 両辺を δ でわり, δ → 0 とすると次
式となる.
J ∗(t + δ) − J ∗(t)
≤ V̇ (x∗ (t + T )) + xk Qxk + uk Ruk − x∗ Qx∗ + u∗ Ru∗
δ→0
δ
(3.19)
lim
ここで, J ∗ は C 1 であるならば, 次式のように書くことができる.
J˙∗(t) ≤ − x∗ Qx∗ + u∗ Ru∗ + x∗ Qx∗ + uk Ruk + V̇
(3.20)
ここで, V が control Lyapunov 関数であることを用いると
J˙∗ (t) ≤ 0
(3.21)
が成立する. よって, J ∗ は control Lyapunov 関数とみなすことができ, 安定性が保証され
✷
る.
3.4
飛行船システム
本章で考える飛行船システムを図 3.3 に示す. カメラは, 飛行船の上部に固定している. カ
メラから得られる画像を図 3.4 に示す. ここで, 2 つの大きさの異なる特徴点を飛行船の上
部に見ることができる. これらの特徴点を用いて, 飛行船の位置と回転は飛行船にセンサを
取り付けなくても得ることができる.
本章では, 飛行船のモデルを図 3.5 のように考える. ここで, 飛行船は水平な平面内を動
くとして垂直に動かないとする. 図 3.5 において, x1, x2 , θ は飛行船の重心における位置と
回転を表している. また, 飛行船に働く力は f1 , f2 , f3 であり, 各プロペラによって起こると
して, それらのプロペラは, 重心から距離 d, l の位置にそれぞれ取り付けられている. この
3.4. 飛行船システム
45
図 3.4: Image from the camera in Fig. 3.3
x2
f2
d
l
(x1 , x2 )
θ
f1
d
f3
x1
図 3.5: Model of the blimp in the image plane
ように, プロペラによって働く力は水平方向に作用して, 垂直方向には作用しない. m と J
は, 飛行船の重量, 慣性モーメントをそれぞれ表している. ここで, 各パラメータ d, l, m, J
を表 3.1 に示す.
問題を簡単化するためにいくつかの仮定をおく.
(A3.1) : 飛行船は剛体である.
(A3.2) : 飛行船は, ローリング, ピッチングがなく, 垂直方向には動かない.
(A3.3) : 飛行船は風に影響しない.
46
第 3 章 自己スケジューリングパラメータを持つ線形システムのモデル予測制御
表 3.1: Parameter values of the blimp
Symbol
Value
Unit
d
6.3 × 10−2
[m]
l
2.3 × 10−1
[m]
m
7.5 × 10−2
[kg]
J
3.5 × 10−3
[kg·m2]
このとき, 画像平面における飛行船のダイナミカルモデルは次のように表される.
mẍ1 = f1 cos θ + f2 cos θ + f3 sin θ
mẍ2 = f1 sin θ + f2 sin θ − f3 cos θ
(3.22)
J θ̈ = d(f1 − f2 ) + lf3
そこで, スケジューリングパラメータを θ とすると, 飛行船のモデルは次式のような自己ス
ケジューリングパラメータを持つ線形システムとして表すことができる.
ẋ(t) = Ax + B(θx (x))u
θx (x) = hx
(3.23)
ここで, 状態 x と制御入力 u は x = [ x1 x2 θ ẋ1 ẋ2 θ̇ ], u = [ f1 f2 f3 ] とする.
また, システム行列 A, B(θx (x)), h は次のように与えられる.
0
0
0
0 0 0 1 0 0
0
0 0 0 0 1 0
0
0
0
0 0 0 0 0 1
0
0
, B(θx(x)) =
A=
cos θ cos θ sin θ
m
0 0 0 0 0 0
m
m
sin θ sin θ
θ
m
0 0 0 0 0 0
− cos
m
m
l
h
− Jh
0 0 0 0 0 0
J
J
,
h=[ 0 0 1 0 0 0 ]
上記のシステム (3.23) は, 自己スケジューリングパラメータ θ を持つ線形システムであるた
め, 2 節で提案した手法を用いることができる. 以下の節では, 飛行船システムにモデル予測
制御を適用した結果を示す.
3.5. シミュレーション
3.5
3.5.1
47
シミュレーション
コントローラシンセシス
飛行船システムに対してモデル予測制御を適用する. はじめに, 定理 3.5 を用いて control
Lyapunov 関数を構成することで終端コスト関数を設定する. このとき, 設計パラメータは
Q, R, Pu , c は次のように与える.
Q = diag([10 10 100 1 1 1])
(3.24)
R = diag([1 × 106 1 × 106 1 × 106 ])
(3.25)
Pu = diag([0.00882 /c 0.00882 /c 0.00592 /c])
c = 100
(3.26)
(3.27)
LMI 条件 (3.5) と (3.6) を解くことにより, 正定対称行列 P (θx ) を求めることができる. この
とき, 終端コスト関数 V (x(t + T )) は次式で与えられる.
V (x(t + T )) = x(t + T )P (θx (x(t + T )))−1x(t + T )
(3.28)
ただし, 無限次元の LMI 条件 (3.5), (3.6) を有限次元の LMI 条件にする手法 [4, 6] を用い
ており, 計算可能な問題となっていることに注意する. 特に本章では, 正定対称行列 P (θx (x))
と行列 W (θx (x)) は有限でアフィンなパラメトリゼーションを用いていることに注意する.
P (θx (x)) = P0 + θP1
W (θx (x)) = W0
3.5.2
(3.29)
(3.30)
シミュレーション結果
本節ではシミュレーション結果を示す. 制御目的は, 以下の初期状態から平衡状態に安定
化する定置制御である. これを図 3.6 に示す.
初期状態 : [ x1(0) x2 (0) θ(0) ẋ1 (0) ẋ2(0) θ̇(0) ] = [ −0.35 −0.35 π/2 0 0 0 ]
平衡状態 : [ x1 x2 θ ẋ1 ẋ2 θ̇ ] = [ 0 0 0 0 0 0 ]
最適な制御入力を求めるための最適化は 0.001 [s] ごとに実行されるとする. また, シミュ
レーションのサンプリング時間も 0.001 [s] とする. 本章では, モデル予測制御で用いる最適
化のソフトウェアとして C/GMRES [49, 50] を用いた.
48
第 3 章 自己スケジューリングパラメータを持つ線形システムのモデル予測制御
x2
−0.35
x1
Desired Condition
−0.35
Initial Condition
図 3.6: Regulation problem
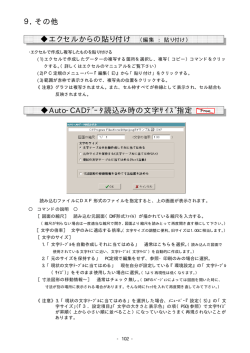
予測ホライズンの長さを変えたモデル予測制御と最適制御を用いた場合のシミュレーショ
ン結果を図 3.7–3.9 に示す. 図 3.7 は, x1 − x2 のトラジェクトリを示し, 図 3.8–3.9 は状態と
制御入力を表している. 実線, 破線は, それぞれホライズン T = 0.1 [s], T = 1 [s] のモデル
予測制御, 鎖線は最適制御を表している.
シミュレーション結果から, モデル予測制御によるコントローラと最適制御コントローラ
はシステムを安定化することができている. ただし, モデル予測制御によるコントローラで
は, ホライズンの長さを増やすにつれて最適制御のトラジェクトリに近づいている. また,
モデル予測制御と最適制御のコストに関する性能を次の指標 J を用いて評価した結果を表
3.2 に示す.
80
J=
(xQx + u Ru) dt
(3.31)
0
表 3.2 から次のことがわかる. 最適制御から得られたコストは, モデル予測制御よりも小さ
い. モデル予測制御の場合では, ホライズンを T = 1 [s] から T = 0.1 [s] に減らしていくと
コストは増えていく. このように, ホライズンの長さは, モデル予測制御の性能に重要な役
割を果たすことがわかる.
このように, モデル予測制御は最適制御と比べて, より短いトラジェクトリを得られるこ
とがわかる. しかし, コストに関する性能をみると, モデル予測制御は最適制御よりも大き
なコストがかかることがわかる.
3.5. シミュレーション
49
0
x2 [m]
−0.1
−0.2
−0.3
−0.35
−0.4
−0.5
−0.35
−0.2
−0.1
0
0.1
x1 [m]
図 3.7: Trajectory of x1 − x2 (solid: Model predictive control(T = 0.1 [s]), dashed: Model
predictive control (T = 1 [s]), dot-dashed: Optimal control)
表 3.2: Values of the cost function
Method
Cost
Model predictive control T = 0.1 [s]
79.2
Model predictive control T = 1 [s]
67.9
Optimal control
65.9
第 3 章 自己スケジューリングパラメータを持つ線形システムのモデル予測制御
50
0
0.1
0.05
−0.2
ẋ1 [m/s]
x1 [m]
−0.1
−0.3
−0.4
−0.5
0
20
40
60
0
−0.05
−0.1
0
80
20
t [s]
−0.1
ẋ2 [m/s]
x2 [m]
60
80
60
80
0.1
−0.2
−0.3
20
40
60
0.05
0
−0.05
0
80
20
t [s]
40
t [s]
2
0.2
1.5
0
1
θ̇ [rad/s]
θ [rad]
80
0.15
0
0.5
0
−0.5
0
60
t [s]
0.1
−0.4
0
40
20
40
60
80
t [s]
−0.2
−0.4
−0.6
0
20
40
t [s]
図 3.8: States (solid: Model predictive control (T = 0.1 [s]), dashed: Model predictive
control (T = 1 [s]), dot-dashed: Optimal control)
3.5. シミュレーション
51
0.01
0.04
0.03
f2 [N]
f1 [N]
0.005
0
0.02
0.01
0.005
−0.01
0
0
20
40
60
80
−0.01
0
t [s]
20
40
60
80
t [s]
0.02
f3 [N]
0
−0.02
−0.04
−0.06
0
20
40
60
80
t [s]
図 3.9: Control input (solid: Model predictive control (T = 0.1 [s]), dashed: Model predic-
tive control (T = 1 [s]), dot-dashed: Optimal control)
52
3.6
3.6.1
第 3 章 自己スケジューリングパラメータを持つ線形システムのモデル予測制御
制御実験
実験環境
本章では, 図 3.10 に示すような自動飛行船実験システムを考えた. 以下に詳細を示す.
天井に取り付けられたカメラ (TINY-3H2, RF Systems) から得られた画像は, 画像処理
ボード (PicPort-Color,Leutron) を通してホストコンピュータに送られる. 送られた画像は,
画像処理ソフト (HALCON, MVTec) を用いて処理され, 飛行船の 2 つの特徴点を抽出して,
飛行船の位置と姿勢を求める. 得られた飛行船の位置と回転は, digital signal processing
(DSP) ボード (DS1102, dSPACE) に送られる. DSP には, A/D 変換, D/A 変換などが含ま
れた多機能処理ボードである. 前節で設計されたコントローラは MATLAB の SIMULINK,
Real-Time Workshop で C 言語にコーディングされ, DSP とのインターフェイスソフトウェ
ア ControlDesk を用いて実装される. DSP 上で計算された制御入力は, D/A 変換されて送
信機に送られる. 送信機では無線で飛行船上にあるモータに命令値をおくることで飛行船が
制御される.
Camera
Blimp
Image
PicPort
HALCON
DS1102
Simulink
ControlDesk
図 3.10: Unmanned blimp system
3.6. 制御実験
3.6.2
53
実験結果
モデル予測制御を用いた制御実験を示す. 制御目的は, 前節のシミュレーションと同様で
ある. ここで, 初期状態は次のように与える.
初期状態 : [ x1(0) x2(0) θ(0) ẋ1 (0) ẋ2 (0) θ̇(0) ]
= [ −0.34 −0.30 1.62 −2.1 × 10−2 8.5 × 10−3 −2.0 × 10−2 ]
最適な制御入力は, 0.033 [s] ごとに更新される. これは, カメラから得られる画像を処理す
るサンプリング時間が 0.033 [s] であることから決定している. シミュレーションと同様に,
最適化のソフトウェアとして C/GMRES を用いている.
ホライズン T = 0.1 [s] の場合のモデル予測制御を用いた場合の実験結果を図 3.11–3.13
に示す. 図 3.11 は, x1 − x2 のトラジェクトリを描いており, 図 3.12–3.13 は状態と制御入力
を描いている. 実験結果から, control Lyapunov 関数を終端コスト関数として用いたモデル
予測制御を用いてシステムを安定化できていることがわかる. この実験では, 飛行船が微風
による影響を受けるため, 同じ環境でホライズンを変えた実験をおこなうことは困難である
ため, 1 つの場合について示している.
このように, 自己スケジューリングパラメータを持つ線形システムに対するモデル予測制
御を用いて, 実システムに対しても安定性が保証されることを確認することができた. 問題
点としては, 平衡状態近傍において収束がよくないことである.
0.2
0.1
x2 [m]
0
−0.1
−0.2
−0.3
−0.4
−0.6
−0.4
−0.2
0
0.2
x1 [m]
図 3.11: Trajectory of x1 − x2
0.4
第 3 章 自己スケジューリングパラメータを持つ線形システムのモデル予測制御
54
0.4
0.4
0.2
0
ẋ1 [m/s]
x1 [m]
0.2
−0.2
−0.4
0
20
40
60
0
−0.2
−0.4
0
80
20
0.4
0.6
0.2
0.4
0
−0.2
−0.4
0
20
40
60
80
60
80
60
80
t [s]
ẋ2 [m/s]
x2 [m]
t [s]
40
60
0.2
0
−0.2
0
80
20
t [s]
40
t [s]
2
1
0.5
θ̇ [rad/s]
θ [rad]
1
0
−1
0
20
40
60
80
0
−0.5
−1
0
t [s]
20
40
t [s]
図 3.12: States
55
0.4
0.6
0.2
0.4
0
0.2
f2 [N]
f1 [N]
3.6. 制御実験
−0.2
−0.4
0
0
−0.2
20
40
60
80
−0.4
0
t [s]
f3 [N]
0.1
0
−0.1
20
40
40
t [s]
0.2
−0.2
0
20
60
80
t [s]
図 3.13: Control inputs
60
80
第 3 章 自己スケジューリングパラメータを持つ線形システムのモデル予測制御
56
3.7
おわりに
本章では, 自己スケジューリングパラメータを持つ線形システムに対してモデル予測制御
を考えた. また, 飛行船システムは, 自己スケジューリングパラメータを持つ線形システム
と記述することが可能であることからその適用をおこなった.
特に, 自己スケジューリングパラメータを持つ線形システムに対して control Lyapunov 関
数を構成するための設計手法を提案した. そして, モデル予測制御の安定性を保証するため
に, control Lyapunov 関数を終端コスト関数として用いるモデル予測制御を考えて安定性を
示した. 定置制御に対するシミュレーション結果では, モデル予測制御を用いてシステムを
安定化できることを示した. また, 最適制御と比較すると, 速応性についてはよい結果を得
ることができた. しかし, コストに関して比較してみると, 最適制御と比較してモデル予測
制御はコストが大きくなることがわかった. 最後に, 飛行船システムを用いて提案したモデ
ル予測制御の安定性を確認した.
問題点は, ホライズンと安定性や性能との関係が導かれていないため, ホライズンの設計
に対する系統的な方法がないことである. また, 平衡状態近傍における収束性を改善するこ
とである.
57
第 4章
受動性を有するロボットシステムのモデル
予測制御
4.1
はじめに
本研究では, 安定性を保証する非線形システムのモデル予測制御を考える. そこで, 本章
では, 受動性を有するロボットシステムのモデル予測制御を考える. ロボット制御では受動
性に基づく手法が知られており, ロボットシステムの構造的な特性を用いている [9, 29]. こ
の手法は, 受動性と呼ばれる性質を用いて制御目的が達成するようなロボットシステムの
エネルギー関数を形成することである. 従来研究において, いくつかの手法が知られている
[53, 63, 69].
従来研究では, 安定性を保証するために終端拘束を用いた手法 [43, 45], 終端コスト関数を
用いた手法 [27, 48] が提案されているが, 計算量の問題から終端拘束よりも終端コスト関数
を用いた手法が多く用いられている. 特に, 終端コスト関数として適当な control Lyapunov
関数により, モデル予測制御の安定性が保証されることが知られている. この方法を用いた
応用例として, Caltech Ducted Fan に対する研究 [76] や F-16 Aircraft に対する研究 [10] が
あげられる.
本章では, ロボットシステムに対するモデル予測制御を考える. あらかじめ解析的に得ら
れているロボットシステムの Lyapunov 関数を control Lyapunov 関数として扱うことがで
きるための条件を提案し, モデル予測制御の終端コスト関数として適用する. そこで, 受動
性に基づくロボット制御における従来研究で提案されている 3 つの手法について, それぞれ
の Lyapunov を用いたモデル予測制御の安定性を示す. そして, 提案したモデル予測制御を
図 4.1 の SICE-DD アームに適用する. 制御目的として定置制御と追従制御を考え, 受動性
に基づく制御とモデル予測制御との比較をおこなう. 本章で提案する手法を用いることによ
第 4 章 受動性を有するロボットシステムのモデル予測制御
58
り, 他の受動性を有するシステムの制御, 例えば視覚フィードバック制御などにもモデル予
測制御を適用することができることが期待される.
本章の構成は以下のとおりである. 2 節では, 問題設定をおこなう. 3 節では, モデル予測
制御の安定性を示す. 4 節では, 定置制御と追従制御に対するシミュレーション結果につい
てまとめる. 5 節では, 実験環境についてまとめ, 定置制御と追従制御に対する実験結果を示
す. 最後に結論を述べる.
図 4.1: SICE-DD arm
4.2
問題設定
本章では, 次式で表される n 自由度のロボットダイナミクスを考える.
M(q)q̈ + C(q, q̇)q̇ + g(q) = τ
(4.1)
ここで,q, q̇, q̈ ∈ Rn はそれぞれの各関節の角度, 角速度, 角加速度を表し, τ ∈ Rn は入力
トルク, M(q) ∈ Rn×n は正定な慣性行列, C(q, q̇)q̇ ∈ Rn は遠心力 · コリオリ力項, g(q) ∈ Rn
は重力項を表す. ロボットダイナミクスにおいて行列
Ṁ(q) − 2C(q, q̇)
(4.2)
は歪対称行列となる性質がある [51]. この特徴は, ロボットダイナミクスにおいて入力 τ と
出力 q̇ の間に受動性が成り立つことである.
本章の場合, 図 4.2, 4.3 に示すように n = 2 を考え, ロボットダイナミクスの各要素は次
4.2. 問題設定
59
のように与えられる.
M(q) =
C(q, q̇) =
M1 + M2 + 2R cos q2 M2 + R cos q2
M2 + R cos q2
M2
−Rq̇2 sin q2 −R(q̇1 + q̇2) sin q2
Rq̇1 sin q2
0
ここで, M1 , M2 , R は以下のとおりである.
M1 = m1r12 + m2l12 + I1 = 6.5240 × 10−1
M2 = m2r22 + I2 = 3.7900 × 10−2
R = m2l1 r2 = 4.1400 × 10−3
y
r2
q2
l2
r1
q1
x
l1
図 4.2: Schematic diagram of the two-link
図 4.3: SICE-DD arm
direct drive manipulator
システム (4.1) に対してモデル予測制御を考える. モデル予測制御では, 各 δ 秒ごとに次
の評価関数を最小化する最適入力を求める.
t+T
J=
l(x, u)dτ + V (x(t + T ))
(4.3)
t
ここで, t は現在時刻, T は予測ホライズン, l(x, u) は性能指標を表す正定な関数, V (x(t+T ))
は終端コスト関数を表している. ただし, x はシステムの状態を表すため問題設定に依存す
る. 初期状態 x(t) を用いて得られた最適な制御入力 u∗(t) が δ 秒間システムに入力され, 次
の時刻 t + δ では状態 x∗(t + δ) が得られる. これを初期状態として得られる最適な制御入
力 u∗(t + δ) を入力するというように, これらを繰り返すことにより制御をおこなう.
第 4 章 受動性を有するロボットシステムのモデル予測制御
60
4.3
モデル予測制御の安定性
モデル予測制御の安定性に関する従来研究において, 最初の方法として終端拘束条件 [43],
終端拘束不等式条件が知られている [45]. しかし, 終端拘束条件がある最適制御問題は計算
量の問題から高速性が難しく, 終端コスト関数を用いた最適制御問題によりモデル予測制御
の安定性が示されている [48]. 他の方法として, 最初に大域的な control Lyapunov 関数を見
つけることによって安定な制御則が保証される上で, control Lyapunov 関数を終端コスト
関数として用いている [27, 76]. ここで, 本章で扱う control Lyapunov 関数とは次のよう
に定義される.
定義 4.3 Control Lyapunov 関数
C 1 かつ正定な関数 V : Rn → R+ が次式を満たす
inf V̇ (x, u) + l(x, u) ≤ 0
u
(4.4)
しかし, ロボットシステムの Lyapunov 関数は制御問題の設定により, いくつかの手法が
提案されている [53, 63, 69]. ゆえに, 本稿ではこれらの Lyapunov 関数を用いたモデル予測
制御の安定性を示す. 以下では, 3 つの手法について考える.
4.3.1
方法 1
Takegaki ら [69] の制御則は次のように与えられる.
τ = g(q) − Kp1 e + u,
Kp1 > 0
(4.5)
ここで, e := q − qd , qd は目標角度である.
q̇d = 0 を仮定すると, (4.1) 式と (4.5) 式からなるシステムの Lyapunov 関数は
1
1
V1 = q̇ M(q)q̇ + eKp1 e
2
2
(4.6)
で与えられる. (4.2) 式の特性を用いると (4.6) 式の時間微分は次式となる.
1
V̇1 (t) = q̇ M(q)q̈ + q̇ Ṁ (q)q̇ + eKp1 ė
2
1
(∵ q̇d = 0)
= q̇ (u − Kp1 e − C(q, q̇)q̇) + q̇ Ṁ(q)q̇ + e Kp1 q̇
2
1 = q̇ u + q̇ Ṁ (q) − 2C(q, q̇) q̇ − q̇ Kp1 e + eKp1 q̇
2
= q̇ u
(4.7)
4.3. モデル予測制御の安定性
61
このとき, 受動性に基づく制御では u = −Kd1 q̇ (Kd1 > 0) とすることにより安定性を示し
ている (図 4.4). 本章では, 図 4.5 に示すモデル予測制御を用いて安定性を示す. ここで, 次
の定理が導かれる.
u
qd
−
e
+
Kp1
−
Kd1
+ +
Robot
Dynamics
+
.
q
q
g(q)
図 4.4: Block diagram of passivity-based control (Method 1)
qd
− e
+
Model
Predictive
Control
u+
Kp1
+
−
+
Robot
Dynamics
.
q
q
g(q)
図 4.5: Block diagram of model predictive control (Method 1)
定理 4.7 性能指標 l(x, u) と終端コスト関数 V1 (x(t + T )) が次のように与えられるとする.
l(q̇, u) = q̇ Q1 q̇ + u R1 u
1
1
V1 (q̇, e) = q̇ M(q)q̇ + e Kp1 e
2
2
(4.8)
(4.9)
ただし, Q1 と R1 は Q1 − 14 R−1
1 ≤ 0 を満たす. このとき, 制御則 (4.5) において u にモデル
予測制御を用いた場合, 安定性が保証される.
証明 以下の関係式から関数 (4.9) 式が control Lyapunov 関数であることが導かれる.
l(q̇, u) + V̇1 (q̇, e) = q̇ Q1q̇ + uR1 u + q̇ u
−1
q̇ + u + (1/2)R−1
= q̇ Q1 − (1/4)R−1
1
1 q̇ R1 u + (1/2)R1 q̇
(4.10)
第 4 章 受動性を有するロボットシステムのモデル予測制御
62
ここで, J ∗ が (4.3) 式の最適解であるとする. そこで, J ∗ が control Lyapunov 関数とみな
すことができることで安定性示す [27]. 区間 [t, t + T + δ] で準最適な制御則を以下のように
与える.
ũ := u∗[t,t+T ] + uk[t+T ,t+T +δ]
(4.11)
J ∗ と J において次のような関係が導かれる.
t+T
∗
l(q̇ ∗, u∗)dτ + V1 (q̇ ∗(t + T ), e∗(t + T ))
J (t) =
t
t+δ
t+T +δ
∗
∗
=
l(q̇ , u )dτ + J (t + δ) −
l(q̇ k , uk )dτ
t
∗
∗
t+T
+ V1 (q̇ (t + T ), e (t + T )) − V1 (q̇ k (t + T + δ), ek (t + T + δ))
(4.12)
最適性により J ∗ ≤ J から最適値を J で置き換えて, 両辺を δ でわり, δ → 0 とすると次式
となる.
J ∗(t + δ) − J ∗ (t)
≤ V̇1 (q̇ ∗(t + T ), e∗(t + T )) + l(q̇ k , uk )dτ − l(q̇ ∗, u∗)
δ→0
δ
lim
ここで, J ∗ は C 1 であるならば, 次式のように書くことができる.
∗
∗
∗
˙
J (t) ≤ −l(q̇ , u ) + l + V̇1 (q̇ ∗(t + T ), e∗(t + T ), uk )dτ
よって, J ∗ は control Lyapunov 関数とみなすことができ, 安定性が保証される.
4.3.2
(4.13)
(4.14)
✷
方法 2
Paden ら [53] は次に示す制御則を提案している.
τ = M(q)q̈d + C(q, q̇)q̇d + g(q) − Kp2 e + u,
Kp2 > 0
(4.15)
ここで, e := q − qd であり, qd, q̇d, q̈d は目標角度, 目標角速度, 目標加速度をそれぞれ表す.
Lyapunov 関数は
1
1
V2 = ėM(q)ė + eKp2 e
2
2
(4.16)
で与えられ, その時間微分は次のように導かれる.
1
V̇2 (t) = ėM(q)ë + ėṀ(q)ė + e Kp2 ė
2
1
= ė (u − Kp2 − C(q, q̇)ė) + ėṀ(q)ė + e Kp2 ė
2
1
= ė u + ė Ṁ (q) − 2C(q, q̇) ė − ėKp2 e + eKp2 ė
2
= ė u
(4.17)
4.3. モデル予測制御の安定性
63
受動性に基づく制御では u = −Kd2 ė (Kd2 > 0) と与えることにより安定性を示している (図
4.6). 本章では, 図 4.7 に示すようにモデル予測制御を用いて安定性を示す. このとき, 方法
1 と同様に以下の定理が成立する.
..
qd
.
qd
qd
.
− e
e
+
Kd2
−
+
−
+
Kp2
Robot
Dynamics
.
q
q
.
..
M(q)qd+C(q,q)qd+g(q)
図 4.6: Block diagram of passivity-based control (Method 2)
..
qd
.
qd
qd
.
− e
e
+
Model
Predictive
Control
+
−
+
Kp2
+
Robot
Dynamics
.
q
q
.
..
M(q)qd+C(q,q)qd+g(q)
図 4.7: Block diagram of model predictive control (Method 2)
定理 4.8 性能指標 l(x, u) と終端コスト関数 V2 (x(t + T )) が次のように与えられるとする.
l(ė, u) = ėQ2ė + u R2u
1
1
V2 (ė, e) = ėM(q)ė + eKp2 e
2
2
(4.18)
(4.19)
ここで, Q2 と R2 は Q2 − 14 R−1
2 ≤ 0 を満たす. このとき, 制御則 (4.15) において u にモデ
ル予測制御を用いた場合, 安定性が保証される.
証明 定理 4.7 と同様に導くことができる.
第 4 章 受動性を有するロボットシステムのモデル予測制御
64
4.3.3
方法 3
Slotin ら [63] が提案した制御則は次式で与えられる.
τ = M(q)q̈r + C(q, q̇)q̇r + g(q) − Kp3 e + u,
Kp3 > 0
(4.20)
ここで, e := q − qd , q̇r := q̇d − Λe, s := q̇ − q̇r であり, Λ は正定行列である.
また, Lyapunov 関数を次式で与える.
1
1
V3 = s M(q)s + eKp3 e
2
2
(4.21)
(4.21) 式の時間微分は次式のように導かれる.
1
V̇3 (t) = s M(q)ṡ + sṀ (q)s + eK3 ė
2
1
= s (u − C(q, q̇)s − Kp e) + sṀ (q)s + eKp ė
2
1
= s u + s Ṁ (q) − C(q, q̇) s − s Kp3 e + e Kp ė
2
= s u − (ė + Λe) Kp3 e + eKp ė
= s u − eΛKp3 e
(4.22)
よって, 受動性に基づく制御では u = −Kd3 s (Kd3 > 0) と与えることで安定性を保証して
いる (図 4.8). ここでは, 図 4.9 に示すようにモデル予測制御を用いて安定性を保証する. 方
法 1, 2 と同様に以下の定理が成立する.
..
qd
.
qd
qd
−
+
.
e
e
s
Kd3
Kp3
−
−
+
+
Robot
Dynamics
.
..
M(q)qr+C(q,q)qr+g(q)
Λ
Λ
図 4.8: Block diagram of passivity-based control (Method 3)
.
q
q
4.4. シミュレーション
..
qd
.
qd
qd
−
+
.
e
65
e
Model
Predictive
Control
Kp3
+
−
+
Robot
Dynamics
+
.
q
q
.
..
M(q)qr+C(q,q)qr+g(q)
Λ
Λ
図 4.9: Block diagram of model predictive control (Method 3)
定理 4.9 性能指標 l(x, u) と終端コスト関数 V3 (x(t + T )) が次のように与えられていると
する.
l(e, s, u) = eQ31e + sQ32s + u R3 u
1
1
V3 (e, s) = s M(q)s + eKp e
2
2
(4.23)
(4.24)
ここで, Q31, Q32, R3 が Q31 − ΛKp3 ≤ 0, Q32 − 14 R−1
3 ≤ 0 を満たす. このとき, 制御則 (4.20)
において u にモデル予測制御を用いた場合, 安定性が保証される.
証明 定理 4.7 と同様に導くことができる.
4.4
シミュレーション
本節では, 4.3 節で提案したモデル予測制御をシミュレーションにより検証する. モデル
予測制御は, 最適化ソフトウェア C/GMRES [49] を用いた. 定置制御と追従制御について
考え, 安定性とホライズンの長さによる影響, コストに関する性能について, 3 つの方法を比
較する.
4.4.1
定置制御
定置制御では, ロボットアームの角度を以下の初期状態から目標状態に制御する制御問題
を考える (図 4.10)
各方法について, 設計パラメータは次のように設計した.
第 4 章 受動性を有するロボットシステムのモデル予測制御
66
Desired condition
π/4
初期状態 : q1 (0) = q2(0) = 0 [rad],
q̇1 (0) = q̇2(0) = 0 [rad/s]
目標状態 : qd1 = qd2 = π/4 [rad],
q̇d1 = q̇d2 = 0 [rad/s]
Initial condition
π/4
図 4.10: Regulation problem
• 方法 1: Kp1 = diag([30 10.5]), Q1 = diag([4 0.9]), R1 = diag([0.06 0.2])
• 方法 2: Kp2 = diag([30 10.5]), Q2 = diag([4 0.9]), R2 = diag([0.06 0.2])
• 方法 3: Kp3 = diag([30 20]), Q31 = diag([1 0.1]), Q32 = diag([4 1]),
R3 = diag([0.06 0.2]), Λ = diag([0.1 0.01])
シミュレーション結果を図 4.11–4.13 に示す. ここで, 実線, 破線, 鎖線はそれぞれホライズ
ン T = 0.05 [s], T = 0.1 [s], T = 0.5 [s] のモデル予測制御を表している. これらの図より,
すべての方法に対して安定性が保証されていることを確認することができる. また, ホライ
ズン時間により性能が異なっている. 2 軸のトラジェクトリは, ホライズン時間が短い場合
の方が, 短い軌道を描いていることがわかる.
次に, 次式で定義されるコスト
2
l(x, u)dt
(4.25)
0
を表 4.1 に示す. 表 4.1 より, ホライズンの長さが増加するとコストは次第に減っていくこ
とが確認できる. このように, ホライズンの長さは性能に何らかの影響を表すことがわかる.
表 4.1: Values of the cost function
Horizon Time Method 1 Method 2
Method 3
T = 0.05 [s]
12.5
12.5
15.5
T = 0.1 [s]
12.2
12.2
15.2
T = 0.5 [s]
11.9
11.9
14.3
4.4. シミュレーション
67
2.5
4
3
q̇2 [rad/s]
q̇1 [rad/s]
2
1.5
1
0.5
0
2
1
0
−0.5
−1 −0.785−0.6 −0.4 −0.2
0
0.2
−1 −0.785−0.6 −0.4 −0.2
0.2
0.2
0
0
−0.2
−0.4
−0.6
−0.8
0
−0.2
−0.4
−0.6
0.5
1
1.5
−0.8
0
2
0.5
t [s]
q̇2 [rad/s]
q̇1 [rad/s]
2
1.5
2
1.5
2
3
1
0
2
1
0
0.5
1
1.5
−1
0
2
0.5
t [s]
1
t [s]
5
5
0
0
−5
u2 [N]
u1 [N]
1.5
4
2
−10
−5
−10
−15
−20
0
1
t [s]
3
−1
0
0.2
e2 [rad]
e2 [rad]
e1 [rad]
e1 [rad]
0
0.5
1
t [s]
1.5
2
−15
0
0.5
1
t [s]
図 4.11: Method 1 (solid: T = 0.05 [s], dashed: T = 0.1 [s], dot-dashed: T = 0.5 [s])
第 4 章 受動性を有するロボットシステムのモデル予測制御
68
2.5
4
3
ė2 [rad/s]
ė1 [rad/s]
2
1.5
1
0.5
0
2
1
0
−0.5
−1 −0.785−0.6 −0.4 −0.2
0
0.2
−1 −0.785−0.6 −0.4 −0.2
0.2
0.2
0
0
−0.2
−0.4
−0.6
−0.8
0
−0.2
−0.4
−0.6
0.5
1
1.5
−0.8
0
2
0.5
t [s]
ė2 [rad/s]
ė1 [rad/s]
2
1.5
2
1.5
2
3
1
0
2
1
0
0.5
1
1.5
−1
0
2
0.5
t [s]
1
t [s]
5
5
0
0
−5
u2 [N]
u1 [N]
1.5
4
2
−10
−5
−10
−15
−20
0
1
t [s]
3
−1
0
0.2
e2 [rad]
e2 [rad]
e1 [rad]
e1 [rad]
0
0.5
1
t [s]
1.5
2
−15
0
0.5
1
t [s]
図 4.12: Method 2 (solid: T = 0.05 [s], dashed: T = 0.1 [s], dot-dashed: T = 0.5 [s])
4.4. シミュレーション
69
2.5
4
3
s2 [rad/s]
s1 [rad/s]
2
1.5
1
0.5
0
2
1
0
−0.5
−1 −0.785−0.6 −0.4 −0.2
0
0.2
−1 −0.785−0.6 −0.4 −0.2
0.2
0.2
0
0
−0.2
−0.4
−0.6
−0.8
0
−0.2
−0.4
−0.6
0.5
1
1.5
−0.8
0
2
0.5
t [s]
s2 [rad/s]
s1 [rad/s]
2
1.5
2
1.5
2
3
1
0
2
1
0
0.5
1
1.5
−1
0
2
0.5
t [s]
1
t [s]
5
5
0
0
−5
u2 [N]
u1 [N]
1.5
4
2
−10
−5
−10
−15
−20
0
1
t [s]
3
−1
0
0.2
e2 [rad]
e2 [rad]
e1 [rad]
e1 [rad]
0
0.5
1
t [s]
1.5
2
−15
0
0.5
1
t [s]
図 4.13: Method 3 (solid: T = 0.05 [s], dashed: T = 0.1 [s], dot-dashed: T = 0.5 [s])
第 4 章 受動性を有するロボットシステムのモデル予測制御
70
4.4.2
追従制御
本節では, ロボットアームの角度を以下の初期状態から目標軌道に追従させる制御問題を
考える (図 4.14)
初期状態 : q1(0) = q2 (0) = 0 [rad],
q̇1(0) = q̇2 (0) = 0 [rad/s]
π
目標状態 : qd1 = qd2 = sin(πt) [rad],
4
π2
cos(πt) [rad/s]
q̇d1 = q̇d2 =
4
π/4
π/4
Initial condition
図 4.14: Tracking problem
また, 設計パラメータは次のように設定する.
• 方法 2: Kp2 = diag([30 10.5]), Q2 = diag([2 1]), R2 = diag([0.1 0.2])
• 方法 3: Kp3 = diag([30 20]), Q31 = diag([2 1]), Q32 = diag([0.1 1]),
R3 = diag([0.1 0.2]), Λ = diag([0.1 0.1])
シミュレーション結果を図 4.15–4.16 に示す. ここで, 実線, 破線, 鎖線はそれぞれホライ
ズン T = 0.05 [s], T = 0.1 [s], T = 0.5 [s] のモデル予測制御を表している. これらの図より,
すべての方法に対して安定性が保証されていることを確認することができる. また, ホライ
ズン時間により性能が異なっている. 1, 2 軸のトラジェクトリは, ホライズン時間が短い場
合の方が, 短い軌道を描いていることがわかる.
次に, 次式で定義されるコスト
4
l(x, u)dt
0
(4.26)
4.4. シミュレーション
71
を表 4.2 に示す. 表 4.2 より, ホライズンの長さが増加するとコストは次第に減っていくこ
とを確認することができる. このように, 追従制御の場合においてもホライズンの長さは性
能に何らかの影響を表すことがわかる.
表 4.2: Values of the cost function
Horizon Time Method 2 Method 3
T = 0.05 [s]
3.19
6.31
T = 0.1 [s]
3.19
6.39
T = 0.5 [s]
3.20
6.60
第 4 章 受動性を有するロボットシステムのモデル予測制御
1
1
0
0
ė2 [rad/s]
ė1 [rad/s]
72
−1
−2
−3
−0.3
−1
−2
−0.2
−0.1
0
−3
−0.04 −0.03 −0.02 −0.01
0.1
e1 [rad]
0
0
e2 [rad]
e1 [rad]
0.01
−0.01
−0.1
−0.02
−0.2
−0.3
0
−0.03
1
2
3
4
−0.04
0
1
t [s]
1
1
0
0
−1
−2
−3
0
3
4
3
4
3
4
−1
−2
1
2
3
−3
0
4
1
t [s]
2
t [s]
15
10
10
u2 [N]
15
5
0
−5
0
2
t [s]
ė2 [rad/s]
ė1 [rad/s]
0.01
e2 [rad]
0.1
u1 [N]
0
5
0
1
2
t [s]
3
4
−5
0
1
2
t [s]
図 4.15: Method 2 (solid: T = 0.05 [s], dashed: T = 0.1 [s], dot-dashed: T = 0.5 [s])
73
1
1
0
0
s2 [rad/s]
s1 [rad/s]
4.4. シミュレーション
−1
−2
−3
−0.3
−1
−2
−0.2
−0.1
0
−3
−0.04 −0.03 −0.02 −0.01
0.1
e1 [rad]
0
0
e2 [rad]
e1 [rad]
0.01
−0.01
−0.1
−0.02
−0.2
−0.3
0
−0.03
1
2
3
4
−0.04
0
1
t [s]
1
1
0
0
−1
−2
−3
0
3
4
3
4
3
4
−1
−2
1
2
3
−3
0
4
1
t [s]
2
t [s]
15
10
10
u2 [N]
15
5
0
−5
0
2
t [s]
s2 [rad/s]
s1 [rad/s]
0.01
e2 [rad]
0.1
u1 [N]
0
5
0
1
2
t [s]
3
4
−5
0
1
2
t [s]
図 4.16: Method 3 (solid: T = 0.05 [s], dashed: T = 0.1 [s], dot-dashed: T = 0.5 [s])
第 4 章 受動性を有するロボットシステムのモデル予測制御
74
4.5
制御実験
本節では, 図 4.1 に示す SICE-DD アームを用いてモデル予測制御の安定性を検証し, 受
動性に基づく制御との比較をおこなう.
4.5.1
実験環境
本章では, 図 4.17 に示すようなシステムを用いている. 以下に詳細を示す.
ロボットマニピュレータは, Control Box からの入力トルクによって動作する. ロボッ
トマニピュレータの関節角度は, DS3001(エンコーダ) に送られ, その関節角度をもとに
DS1005(DSP) でモデル予測制御により制御入力を求める. 制御入力を DS2101(D/A 変換)
を通して Control Box に送られる. そして, Control Box で制御入力をトルクに変換してロ
ボットに送られることで制御されている. ホストコンピュータでは, モデル予測制御をする
ためのプログラムを simulink により構成して, DS1003 に送る役割をしている.
Torque J
Angle q
Control Input
DS1005
DS3001
DS2101
DS4001
Emergency Signal
Control Box
Host Computer
図 4.17: Experimental Environment
4.5. 制御実験
4.5.2
75
定置制御
4.4 節のシミュレーションと同様に, ロボットアームの角度を以下の初期状態から目標状
態に制御する制御問題を考える.
初期状態 : q1(0) = q2 (0) = 0 [rad], q̇1(0) = q̇2 (0) = 0 [rad/s]
目標状態 : qd1 = qd2 = π/4 [rad], q̇d1 = q̇d2 = 0 [rad/s]
各設計パラメータは次のように与える.
• 方法 1:
(モデル予測制御)
Kp1 = diag([30 10.5]), Q1 = diag([4 0.35]), R1 = diag([0.05 0.3])
(受動性に基づく制御)
Kp1 = diag([30 10.5]), Kd1 = diag([4.6 0.7])
• 方法 2:
(モデル予測制御)
Kp2 = diag([30 10.5]), Q2 = diag([4 0.35]), R2 = diag([0.05 0.3])
(受動性に基づく制御)
Kp2 = diag([30 10.5]), Kd1 = diag([4.6 0.7])
• 方法 3:
(モデル予測制御)
Kp3 = diag([30 11]), Q31 = diag([1 0.1]), Q32 = diag([4 0.35])
R3 = diag([0.05 0.3]), Λ = diag([0.1 0.01])
(受動性に基づく制御)
Kp3 = diag([30 10.5]), Kd1 = diag([4.6 0.7])
図 4.18–4.20 は, 実験結果を示しており, 実線, 破線, 鎖線はそれぞれホライズン T = 0.05
[s], T = 0.1 [s], T = 0.5 [s] のモデル予測制御, 点線は受動性に基づく制御を表している. モ
デル予測制御を用いて, ロボットシステムを安定にすることができていることがわかる. ま
た, ホライズン T による性能の影響を確認することができる. 一方, 受動性に基づく制御と
比較した場合, モデル予測制御を用いた方が短いトラジェクトリを描いていることがわかる.
しかし, モデル予測制御も受動性に基づく制御も定常偏差をなくすための調整をおこなうこ
とが必要である. 特に, 制御入力がゼロに収束していないのは, 定常偏差が残っているため
である.
第 4 章 受動性を有するロボットシステムのモデル予測制御
5
10
4
8
q̇2 [rad/s]
q̇1 [rad/s]
76
3
2
1
6
4
2
0
0
−1
−1 −0.785−0.6 −0.4 −0.2
0
0.2
−1 −0.785−0.6 −0.4 −0.2
0.2
0.2
0
0
−0.2
−0.4
−0.2
−0.4
−0.6
−0.6
−0.8
−0.8
−1
0
0.5
1
1.5
−1
0
2
0.5
5
10
4
8
3
2
1
2
1.5
2
1.5
2
6
4
0
0.5
1
1.5
2
0
0.5
t [s]
1
t [s]
30
20
15
u2 [N]
20
u1 [N]
1.5
2
0
10
0
−10
0
1
t [s]
q̇2 [rad/s]
q̇1 [rad/s]
t [s]
−1
0
0.2
e2 [rad]
e2 [rad]
e1 [rad]
e1 [rad]
0
10
5
0
0.5
1
t [s]
1.5
2
−5
0
0.5
1
t [s]
図 4.18: Method 1 (solid: T = 0.05 [s], dashed: T = 0.1 [s], dot-dashed: T = 0.5 [s], dot:
Passivity-based control)
77
5
10
4
8
ė2 [rad/s]
ė1 [rad/s]
4.5. 制御実験
3
2
1
6
4
2
0
0
−1
−1 −0.785−0.6 −0.4 −0.2
0
0.2
−1 −0.785−0.6 −0.4 −0.2
0.2
0.2
0
0
−0.2
−0.4
−0.2
−0.4
−0.6
−0.6
−0.8
−0.8
−1
0
0.5
1
1.5
−1
0
2
0.5
5
10
4
8
3
2
1
2
1.5
2
1.5
2
6
4
0
0.5
1
1.5
2
0
0.5
t [s]
1
t [s]
30
20
15
u2 [N]
20
u1 [N]
1.5
2
0
10
0
−10
0
1
t [s]
ė2 [rad/s]
ė1 [rad/s]
t [s]
−1
0
0.2
e2 [rad]
e2 [rad]
e1 [rad]
e1 [rad]
0
10
5
0
0.5
1
t [s]
1.5
2
−5
0
0.5
1
t [s]
図 4.19: Method 2 (solid: T = 0.05 [s], dashed: T = 0.1 [s], dot-dashed: T = 0.5 [s], dot:
Passivity-based control)
第 4 章 受動性を有するロボットシステムのモデル予測制御
5
10
4
8
s2 [rad/s]
s1 [rad/s]
78
3
2
1
6
4
2
0
0
−1
−1 −0.785−0.6 −0.4 −0.2
0
0.2
−1 −0.785−0.6 −0.4 −0.2
0.2
0.2
0
0
−0.2
−0.4
−0.2
−0.4
−0.6
−0.6
−0.8
−0.8
−1
0
0.5
1
1.5
−1
0
2
0.5
5
10
4
8
3
2
1
2
1.5
2
1.5
2
6
4
0
0.5
1
1.5
2
0
0.5
t [s]
1
t [s]
30
20
15
u2 [N]
20
u1 [N]
1.5
2
0
10
0
−10
0
1
t [s]
s2 [rad/s]
s1 [rad/s]
t [s]
−1
0
0.2
e2 [rad]
e2 [rad]
e1 [rad]
e1 [rad]
0
10
5
0
0.5
1
t [s]
1.5
2
−5
0
0.5
1
t [s]
図 4.20: Method 3 (solid: T = 0.05 [s], dashed: T = 0.1 [s], dot-dashed: T = 0.5 [s], dot:
Passivity-based control)
4.5. 制御実験
4.5.3
79
追従制御
4.4 節のシミュレーションと同様に, ロボットアームの角度を以下の目標軌道に追従させ
る制御問題を考える.
初期状態 : q1(0) = q2 (0) = 0 rad, q̇1(0) = q̇2(0) = 0 rad/sec
π
π2
目標軌道 : qd1 = qd2 = sin(πt) rad, q̇d1 = q̇d2 =
cos(πt) rad/sec
4
4
各設計パラメータは以下のようにした.
• 方法 2:
(モデル予測制御)
Kp2 = diag([60 20]), Q2 = diag([0 0 4 0.35]), R2 = diag([0.05 0.3])
(受動性に基づく制御)
Kp2 = diag([30 10.5]), Kd2 = diag([2 0.7])
• 方法 3:
(モデル予測制御)
Kp3 = diag([70 30]), Q31 = diag([1 0.1]), Q32 = diag([4 0.35]),
R3 = diag([0.05 0.3]), Λ = diag([0.1 0.01])
(受動性に基づく制御)
Kp3 = diag([30 20]), Kd3 = diag([5 1])
実験結果を図 4.21–4.22 に示す. ここで, 実線, 破線はそれぞれホライズン T = 0.05 [s],
T = 0.1 [s] のモデル予測制御, 点線は受動性に基づく制御を表している. 図より安定性を保
証することができている. しかし, ホライズン T = 0.05 [s], T = 0.1 [s] の場合では, 大きな
違いが見られなかった. また, 受動性に基づく制御と比較すると偏差の大きさにおいて性能
がよいとはいえない.
第 4 章 受動性を有するロボットシステムのモデル予測制御
80
2
0
ė2 [rad/sec]
ė1 [rad/sec]
1
−1
−2
−3
−0.3 −0.2 −0.1
0
0.1
0.2
0
−2
−4
−0.3 −0.2 −0.1
0.3
0.3
0.3
0.2
0.2
0.1
0
−0.2
−0.2
2
3
−0.3
0
4
1
t [s]
2
3
4
3
4
3
4
t [s]
1
2
0
ė2 [rad/s]
ė1 [rad/s]
0.3
0
−0.1
1
0.2
0.1
−0.1
−0.3
0
0.1
e2 [rad]
e2 [rad]
e1 [rad]
e1 [rad]
0
−1
0
−2
−2
−3
0
1
2
3
−4
0
4
1
t [s]
t [s]
300
30
20
u2 [N]
u1 [N]
200
100
0
−100
0
2
10
0
−10
1
2
t [s]
3
4
−20
0
1
2
t [s]
図 4.21: Method 2 (solid: T = 0.05 [s], dashed: T = 0.1 [s], dot-dashed: T = 0.5 [s], dot:
Passivity-based control)
4.5. 制御実験
81
2
0
s2 [rad/sec]
s1 [rad/sec]
1
−1
−2
−3
−0.3 −0.2 −0.1
0
0.1
0.2
0
−2
−4
−0.3 −0.2 −0.1
0.3
0.3
0.3
0.2
0.2
0.1
0
−0.2
−0.2
2
3
−0.3
0
4
1
t [s]
2
3
4
3
4
3
4
t [s]
1
2
0
s2 [rad/s]
s1 [rad/s]
0.3
0
−0.1
1
0.2
0.1
−0.1
−0.3
0
0.1
e2 [rad]
e2 [rad]
e1 [rad]
e1 [rad]
0
−1
0
−2
−2
−3
0
1
2
3
−4
0
4
1
t [s]
t [s]
300
30
20
u2 [N]
u1 [N]
200
100
0
−100
0
2
10
0
−10
1
2
t [s]
3
4
−20
0
1
2
t [s]
図 4.22: Method 3 (solid: T = 0.05 [s], dashed: T = 0.1 [s], dot-dashed: T = 0.5 [s], dot:
Passivity-based control)
第 4 章 受動性を有するロボットシステムのモデル予測制御
82
4.6
おわりに
本章では, 受動性を有するロボットシステムに対するモデル予測制御を考えた. 特に, 受
動性に基づく制御において提案されている Lyapunov 関数をモデル予測制御の終端コスト
関数として用いた. この提案した手法は, 受動性を有する他のシステムに対しても有効であ
ることが期待される. 次に, 従来研究で提案されている 3 つの方法に対して, 安定性を保証
するための条件を示した. そして, 安定性を保証したモデル予測制御を SICE-DD アームに
適用して定置制御と追従制御に対するシミュレーション結果と実験結果を示した. これらか
ら, 提案するモデル予測制御は安定性を保証することができることを確認することができた.
しかし, ホライズンを長くするにつれて安定性が損なわれる結果となった.
問題点としては, ホライズンの長さと安定性, 性能に関する関係について考えなくてはな
らないことがあげられる.
83
第 5章
結論
5.1
本研究での成果
本研究では, 特別なクラスの非線形システムに対して安定性を保証するモデル予測制御を
考えた. そして, 終端コスト関数の構成法を提案し, その終端コスト関数を用いたモデル予
測制御によるシステムの安定性を示した.
2 章では, 直交条件を仮定しない線形時変システムに対して出力フィードバックによるロ
バストモデル予測制御を考えた. はじめに, ロバストモデル予測制御では, 安定性を保証す
るために重要な役割を果たす一般化終端不等式条件を提案した. そして, 提案した一般化終
端不等式条件を用いたロバストモデル予測制御による出力フィードバックコントローラを
提案し, 閉ループ系の安定性とその L2 ゲインが有界であることが保証されることを示した.
最後に, 提案した手法を用いた設計例を示し, その有効性を示した.
3 章では, 自己スケジューリングパラメータを持つ形システムに対してモデル予測制御を
考えた. 終端コスト関数を構成するために, hidden loop を考慮した control Lyapunov 関
数を用いて, その設計手法を提案した. そして, モデル予測制御の安定性を保証するために,
control Lyapunov 関数を終端コスト関数として用いるモデル予測制御を考えて安定性を示
した. また, 飛行船システムを自己スケジューリングパラメータを持つ線形システムと記述
し, モデル予測制御の適用をおこなった. 定置制御に対するシミュレーションと実験により,
システムを安定化できることを示した. また, 最適制御と比較すると, 速応性についてはよ
い結果を得ることができた. しかし, コストが大きくなることがわかった.
4 章では, 受動性を有するロボットシステムに対してモデル予測制御を考えた. 特に, 受動
性に基づく制御において提案されている Lyapunov 関数をモデル予測制御の終端コスト関
数として用いた. この提案した手法は, 受動性を有する他のシステムに対しても有効である
ことが期待される. 次に, 従来研究で提案されている 3 つの方法に対して, 安定性を保証す
第 5 章 結論
84
るための条件を示した. 安定性を保証したモデル予測制御を SICE-DD アームに適用して定
置制御と追従制御に対するシミュレーション結果, 実験結果を示した. これらより, 提案す
るモデル予測制御は安定性を保証することを確認することができた.
5.2
今後の課題
本研究では, 特別なクラスの非線形システムに対して安定性を保証するモデル予測制御を
考え, 終端コスト関数の構成法を提案した. ところが, 各章に共通する問題点として,
• 設計パラメータホライズンの系統的な設計方法
• 設計パラメータによる制御系の安定性と性能に関する影響
があげられる. よって, モデル予測制御をより系統的な制御系設計法とするために, ホライ
ズンについて着目していかなければならない.
一方, 本研究で提案した終端コスト関数を用いた安定化モデル予測制御は次のような研究
につながることが期待される.
• モデル予測制御を用いた軌道生成問題への応用
• 受動性を有する視覚フィードバック制御への応用
• SOS (Sum of Squares) を用いたモデル予測制御
• ネットワークを介したシステムに対するモデル予測制御
以下に, 各項目に対する説明を示す.
本研究では, モデル予測制御をシステムの安定化のために用いて制御することを考えてき
た. オンラインで有限時間の最適制御問題を時間経過と共に繰り返して解くことによって最
適な制御入力と状態のトラジェクトリを求めることができるが, 最初の制御入力のみを用い
てきた. つまり, 最適な状態のトラジェクトリは使わずにいる. そこで, 様々な拘束条件の
もとで目標点に到達することではなく, 目標に到達するまでの軌道を与えることにより, 階
層的な構造を持つ制御系設計をおこなうことが期待される. このことに関係する研究として
Milan ら [46, 47] らの研究がある.
受動性を有する非線形システムに応用する研究として視覚フィードバック制御 [30] への
応用が考えられる. 人間が目から得られる情報を基に何らかの最適軌道を描きながら, 手足
を制御するような視覚フィードバックシステムにモデル予測制御を用いることで, 性能の改
善が期待できる.
5.2. 今後の課題
85
非線形システムの中には, 多項式で記述することが可能なシステムがある. このようなシ
ステムに対して, SOS (Sum of Squares) を用いた control Lyapunov 関数を用いることによ
り, より保守的でない終端コスト関数構成することが期待される. SOS に関する研究では,
Lyapunov 関数の構成法 [56] や吸収領域の解析 [24, 71] などがある.
ネットワークを介したシステムではむだ時間が存在する. よって, このむだ時間を考慮し
た終端コスト関数を提案して, モデル予測制御を用いることで性能を改善することが期待さ
れる.
付録A
86
線形時不変システムに対する H∞ 制御
付 録A
線形時不変システムに対する H∞ 制御
本章では, 線形時不変 (Linear Time Invariant:LTI) システムに対する H∞ 制御問題とその解
について示す. なお, 本章では, 十分条件についての証明を平方完成を用いた手法により示
す. また, 文献 [36] では, γ = 1 の特殊な場合のみを扱っているが, 本章では γ = 1 という仮
定を緩和した場合において示す.
A.1
H∞ 制御問題
図 A.1 の G に示すような次の LTI システムを考える.
ẋ = Ax + B1 w + B2 u
z = C1x + D11 w + D12 u
(A.1)
y = C2x + D21 w + D22 u
ただし, 以下の条件を仮定する.
• (A, B2 ) は可安定, (C2 , A) は可検出
• (A, B1 ) は可制御, (C1 , A) は可観測
• D11 = 0
0,
• D22 =
D12 =
0
I
および D21 =
0 I
である.
ここで, w → z への閉ループ伝達関数を Tzw (s) を書く. Tzw (s) は, 図 A.2 において破線で囲
むようなシステムを表し, 図 A.3 のように入力 w, 出力 z となるシステムとなる.
A.1. H∞ 制御問題
87
w
z
G
u
y
K
図 A.1: H∞ control problem
w Tzw
z
G
u
w
y
K
z
Tzw
図 A.3: Closed loop system Tzw
図 A.2: Closed loop system Tzw
このとき, 以下で示す H∞ 制御問題を考える.
問題 A.1 H∞ 制御問題
ある指定した γ ∈ R に対して, 閉ループ系を内部安定とし, かつ
Tzw ∞ < γ
(A.2)
を満たすコントローラが存在するかどうか判定し, 存在する場合はそのようなコントローラ
を求めよ.
上記の問題に対して, 一般的に以下の定理が成立する.
定理 A.10 Tzw ∞ < γ を満たす許容コントローラが存在することの必要十分条件は, 以下
の条件が満たされることである.
• 次のリカッチ方程式を満たす M > 0 が存在する.
−1
D12 )
B2 (D12
D12
C1
−1
B2 (D12
D12 )
D12
C1
+ A−
M
M A−
−1
−1
−M B2 (D12
D12) B2 − γ −2 B1B1 M + C1 I − D12 (D12
D12 ) D12
C1 = 0
(A.3)
付録A
88
線形時不変システムに対する H∞ 制御
• 次のリカッチ方程式を満たす P > 0 が存在する.
−1
−1
(D21 D21
) C2 P + P A − B1 D21
(D21 D21
) C2
A − B1 D21
−1
−2 −1
−P C2 (D21 D21) C2 − γ C1C1 P + B1 I − D21 (D21 D21 ) D21 B1 = 0
(A.4)
• M と P は以下の関係を満たす
γP −1
I
I
γM
−1
>0
(A.5)
さらに, 上記の条件が成立するときに 1 つのコントローラは以下で表される.
x̂˙ = Ax̂ + γ −2 B1 B1 M x̂ + B2 u
−1
−1
(P C2 + B1D21
) (D21 D21
) D21B1 M x̂
−γ −2 I − γ −2 P M
−1
−1
+ I − γ −2 P M
(P C2 + B1D21
) (D21 D21
) (y − C2 x̂)
D12 )
u = − (D12
−1
(D12
C1 + B2 M) x̂
(A.6)
(A.7)
上記の定理に対する証明をおこなうために, 後ほど証明で用いる以下の有界実補題を紹介
する [79].
補題 A.3 有界実補題
Ac Bc
に対して, 次の条件は等価である.
γ > 0, Tzw (s) =
Cc 0
• Tzw ∞ < γ
• 次式を満たす Pc ≥ 0
Pc Ac + Ac Pc + γ −2 Pc Bc Bc Pc + Cc Cc = 0
が存在し, Ac + γ −2 Bc Bc Pc が虚軸上に固有値をもたない.
証明 文献 [79] を参照.
注意 A.9 上記の補題は, Tzw ∞ < γ という条件を代数的な条件
Pc Ac + Ac Pc + γ −2 Pc Bc Bc Pc + Cc Cc = 0
に置き換えることができる.
(A.8)
A.2. T の導入
A.2
89
T の導入
定理 A.10 を示すために, (A.3) 式の解 M と (A.4) 式の解 P から構成される新たな変数 T
を定義する.
−1
T = I − γ −2 P M
P
(A.9)
このとき, T は次の性質を持つ.
−1
(D21 D21
)
C2 + γ −2 D21 B1 M
T A + γ −2 B1 B1 M − B1 D21
−1
+ A + γ −2 B1 B1 M − B1 D21
(D21 D21
)
C2 + γ −2 D21B1 M T
−1
−T C2 + γ −2 D21 B1 M (D21 D21
)
C2 + γ −2 D21 B1 M
−1
− γ −2 (MB2 + C1 D12 ) (D12
D12 ) (MB2 + C1 D12 ) T
−1
+B1 I − D21 (D21 D21 ) D21 B1 = 0
(A.10)
以下では, (A.10) 式が成立することを示す.
はじめに, (A.4) 式に左右から P −1 をかける.
−1
−1
(D21 D21
) C2 + A − B1D21
(D21D21
) C2 P −1
P −1 A − B1 D21
−1
−1
−C2 (D21 D21
) C2 + γ −2 C1 C1 + P −1 B1 B1 − B1 D21
(D21 D21
) D21 B1 P −1 = 0
(A.11)
((A.4) 式 − γ −2 × (A.3) 式) を計算すると
−1
−1
P −1 A − B1 D21
(D21 D21
) C2 + A − B1D21
(D21D21
) C2 P −1
−1
−1
−C2 (D21D21
) C2 + γ −2 C1 C1 + P −1 B1 B1 − B1D21
(D21D21
) D21 B1 P −1
−1
−1
−2
M A − B2 (D12
−γ
D12 ) D12
C1 + A − B2 (D12
D12 ) D12
C1 M
−1
−1
D12 ) B2 − γ −2 B1 B1 M + C1 I − D12 (D12
D12 ) D12
C1 = 0
− M B2 (D12
(A.12)
となり, 式展開する.
−1
−1
−1
−1
−1
P A−P
B1 D21 (D21 D21 ) C2 + A P − B1 D21 (D21 D21 ) C2 P −1
−1
−1
−C2 (D21 D21
) C2+γ −2 C1 C1 + P −1 B1 B1 − B1 D21
(D21D21
) D21 B1 P −1
−1
−1
−2
−2
−2 −2
−γ MA + γ M B2 (D12 D12) D12 C1 − γ A M + γ
B2 (D12 D12 ) D12 C1 M
D12 )
+γ −2 MB2 (D12
−1
B2 M − γ −4 MB1 B1 M−γ −2 C1 C1 + γ −2 C1 D12 (D12
D12 )
−1
D12
C1 = 0
(A.13)
付録A
90
線形時不変システムに対する H∞ 制御
γ −2 C1 C1 が消され, (P −1 − γ −2 M) に注意して式をまとめる.
P −1 − γ −2 M A + A P −1 − γ −2 M
−1
−1
−1
−P −1 B1 D21
(D21 D21
) C2 − B1 D21
(D21 D21
) C2 P −1 − C2 (D21D21
) C2
−1
+ P −1 − γ −2 M B1 B1 − B1D21
(D21D21
) D21 B1 P −1 − γ −2 M
−2 −1
−1
B1 B1 − B1D21 (D21 D21 ) D21B1 M
+γ P
−1
(D21 D21
) D21B1 P −1
+γ −2 M B1 B1 − B1D21
−1
−γ −4 M B1 B1 − B1 D21
(D21 D21
) D21 B1 M
−1
−1
+γ −2 M B2 (D12
D12 ) D12
C1 + γ −2 B2 (D12
D12 ) D12
C1 M
D12 )
+γ −2 MB2 (D12
−1
B2 M − γ −4 MB1 B1 M + γ −2 C1 D12 (D12
D12 )
−1
D12
C1 = 0
(A.14)
T −1 = (P −1 − γ −2 M) であることを用いて式をまとめる.
−1
T −1 A + A T −1 + T −1 B1B1 − B1 D21
(D21 D21
) D21 B1 T −1
−1
−1
−P −1 B1 D21
(D21 D21
) C2 + γ −2 P −1 B1 B1 − B1 D21
(D21 D21
) D21 B1 M
−1
−1
−2
−1
− B1 D21 (D21 D21 ) C2 P + γ M B1 B1 − B1 D21 (D21 D21) D21 B1 P −1
−4
−1
−1
−γ M B1B1 − B1 D21 (D21 D21 ) D21 B1 M − C2 (D21 D21
) C2 − γ −4 MB1 B1 M
−1
−1
+γ −2 M B2 (D12
D12) D12
C1 + γ −2 B2 (D12
D12 ) D12
C1 M
+γ −2 MB2 (D12
D12)
−1
B2 M + γ −2 C1 D12 (D12
D12 )
−1
D12
C1 = 0
(A.15)
上のアンダーライン部は P −1 でまとめることができる. また, 下のアンダーライン部は 2 次
形式でまとめることができる.
−1
−C2 (D21 D21
)
−1
−1
B1 B1
B1D21
−1
(D21D21
)
D21 B1
T −1
A+AT +T
−
−1
+P −1 γ −2 B1 B1 M − B1 D21
(D21 D21
)
C2 + γ −2 D21 B1 M
−1
−2
−1
−2
P
C2 + γ D21 B1 M
+ γ B1 B1M − B1D21 (D21D21 )
T
−1
C2 − 2γ −4 MB1 B1 M + γ −4 MB1 D21
(D21 D21
)
D12 )
+γ −2 (MB2 + C1 D12 ) (D12
−1
(MB2 + C1 D12 ) = 0
−1
D21 B1 M
(A.16)
A.2. T の導入
91
P −1 でまとめてある部分を (P −1 − γ −2 M) でまとめる.
−1
T −1 A + A T −1 + T −1 B1 B1 − B1 D21
(D21 D21 ) D21 B1 T −1
−1
+ P −1 − γ −2 M γ −2 B1 B1 M − B1D21
(D21D21
)
C2 + γ −2 D21 B1 M
−1
(D21 D21
)
C2 + γ −2 D21 B1 M
+γ −2 M γ −2 B1B1 M − B1D21
−1
−1
(D21 D21
)
+ γ −2 B1 B1 M − B1 D21
C2 + γ −2 D21 B1 M
P − γ −2 M
−2
−2
−1
−2
+ γ B1 B1 M − B1 D21 (D21 D21 )
γ M
C2 + γ D21 B1M
)
−C2 (D21 D21
−1
C2 − 2γ −4 MB1 B1 M + γ −4 MB1 D21
(D21 D21
)
D12 )
+γ −2 (MB2 + C1 D12 ) (D12
−1
−1
D21 B1 M
(MB2 + C1 D12 ) = 0
(A.17)
T −1 = (P −1 − γ −2 M) であることを用いて式をまとめる.
−1
T −1A + AT −1 + T −1 B1 B1 − B1D21
(D21D21
) D21 B1 T −1
−1
+T −1 γ −2 B1 B1 M − B1 D21
(D21 D21
)
C2 + γ −2 D21 B1 M
−4
−2
−1
−2
+γ MB1 B1 M − γ M B1D21 (D21 D21 )
C2 + γ D21 B1 M
−1
−1
−2
+ γ −2 B1 B1 M − B1 D21
(D21 D21 )
T
C2 + γ D21 B1 M
−4
−2
−1
−2
+γ MB1 B1 M − γ
M
B1 D21 (D21 D21 )
C2 + γ D21 B1 M
)
−C2 (D21 D21
−1
C2 − 2γ −4 MB1 B1 M + γ −4 MB1 D21
(D21 D21
)
+γ −2 (MB2 + C1 D12 ) (D12
D12 )
−1
−1
D21 B1 M
(MB2 + C1 D12 ) = 0
(A.18)
T −1 でまとめる. また, γ −4 MB1 B1 M は打ち消される.
−2
A+γ
T
−
C2 + γ D21 B1 M
−1
−1
(D21 D21
)
T
C2 + γ −2 D21 B1 M
+ A + γ −2 B1 B1 M − B1 D21
−1
−γ −2 M B1D21
(D21D21
)
C2 + γ −2 D21 B1 M
−1
−γ −2 B1 D21
(D21 D21
)
M
C2 + γ −2 D21 B1 M
−1
−2
B1 B1 M
−C2 (D21 D21
)
−1
B1D21
−1
(D21 D21
)
C2 + γ −4 MB1 D21
(D21 D21
)
−1
−1
D21 B1 M
D12) (MB2 + C1 D12)
+γ −2 (MB2 + C1 D12) (D12
−1
−1
B1 B1 − B1 D21 (D21 D21 ) D21 B1 T −1 = 0
+T
(A.19)
付録A
92
線形時不変システムに対する H∞ 制御
アンダーライン部を展開する.
−1
−2
−1
−2
T
A + γ B1 B1M − B1D21 (D21 D21 )
C2 + γ D21 B1 M
−1
−1
(D21 D21
)
T
+ A + γ −2 B1 B1 M − B1 D21
C2 + γ −2 D21 B1 M
C2 − γ −4 MB1 D21
(D21 D21
)
−1
D21 B1 M
D21 B1 M − γ −4 MB1 D21
(D21 D21
)
−1
D21 B1
−γ −2 MB1 D21
(D21D21
)
−γ −2 C2 (D21 D21
)
−C2 (D21 D21
)
−1
−1
−1
C2 + γ −4 MB1 D21
(D21 D21
)
−1
D21 B1 M
−1
+γ −2 (MB2 + C1 D12) (D12
D12) (MB2 + C1 D12)
−1
+T −1 B1 B1 − B1 D21
(D21 D21
) D21 B1 T −1 = 0
(A.20)
アンダーライン部をまとめる.
−1
(D21 D21
)
C2 + γ −2 D21 B1 M
T −1 A + γ −2 B1 B1 M − B1D21
−1
−2
−1
−2
T
C2 + γ D21 B1M
+ A + γ B1 B1 M − B1 D21 (D21 D21 )
−γ −2 MB1 D21
(D21D21
)
−C2 (D21 D21
)
−1
−1
C2 − γ −2 C2 (D21 D21
)
C2 − γ −4 MB1 D21
(D21 D21
)
−1
−1
−1
D21 B1 M
D21 B1 M
+γ −2 (MB2 + C1 D12) (D12
D12) (MB2 + C1 D12)
−1
+T −1 B1 B1 − B1 D21
(D21 D21
) D21 B1 T −1 = 0
(A.21)
アンダーライン部をまとめる.
−1
T −1 A + γ −2 B1 B1 M − B1D21
(D21 D21
)
C2 + γ −2 D21 B1 M
−1
−2
−1
−2
T
+ A + γ B1 B1 M − B1 D21 (D21 D21 )
C2 + γ D21 B1M
−1
− C2 + γ −2 MB1 D21
)
(D21 D21
C2 + γ −2 D21 B1 M
−1
+γ −2 (MB2 + C1 D12) (D12
D12) (MB2 + C1 D12)
−1
+T −1 B1 B1 − B1 D21
(D21 D21
) D21 B1 T −1 = 0
T −1 を左右からかけるようにまとまる.
−1
(D21D21
)
C2 + γ −2 D21 B1 M T
T −1 A + γ −2 B1 B1 M − B1D21
−1
(D21 D21
)
+T A + γ −2 B1 B1 M − B1 D21
C2 + γ −2 D21 B1 M
−1
−T C2 + γ −2 MB1 D21
)
(D21 D21
C2 + γ −2 D21 B1 M
−1
−2
− γ (MB2 + C1 D12) (D12D12 ) (MB2 + C1 D12) T
−1
+ B1 I − D21
(D21 D21
) D21 B1 T −1 = 0
(A.22)
(A.23)
A.3. コンローラの再構成
93
よって, T は次式を満たす.
−1
T A + γ −2 B1 B1 M − B1 D21
(D21 D21
)
C2 + γ −2 D21 B1 M
−1
+ A + γ −2 B1 B1 M − B1 D21
(D21 D21
)
C2 + γ −2 D21B1 M T
−1
)
C2 + γ −2 D21 B1 M
−T C2 + γ −2 D21 B1 M (D21 D21
−1
−2
− γ (MB2 + C1 D12 ) (D12 D12 ) (MB2 + C1 D12 ) T
−1
+B1 I − D21
(D21 D21
) D21 B1 = 0
A.3
(A.24)
コンローラの再構成
定理 A.10 で与えたコントローラ (A.6), (A.7) は, リカッチ方程式 (A.3) の解 M とリカッ
チ方程式 (A.4) の解 P から構成されている. そこで, リカッチ方程式 (A.3) の解 M とリカッ
チ方程式 (A.10) の解 T を用いてコントローラを再構成する.
−1
T = I − γ −2 P M
P
であることから (I − γ −2 P M)
−1
は次式の関係を満たす.
また, 同様に (I − γ −2 P M)
I − γ −2 P M
−1
(A.25)
I − γ −2 P M
−1
= T P −1
(A.26)
は次式の関係を満たす.
−1
−1 = I − γ −2 P M
I − γ −2 P M + γ −2 P M
−1
= I + γ −2 I − γ −2 P M
PM
= I + γ −2 T M
(A.27)
付録A
94
線形時不変システムに対する H∞ 制御
はじめに, コントローラ (A.6) を上記の関係を用いて変形する.
x̂˙ = Ax̂ + γ −2 B1 B1 M x̂ + B2 u
−1
−1
(P C2 + B1 D21
) (D21 D21
) D21 B1 M x̂
−γ −2 I − γ −2 P M
−1
−1
+ I − γ −2 P M
(P C2 + B1 D21
) (D21 D21
) (y − C2 x̂)
= Ax̂ + γ −2 B1 B1 M x̂ + B2 u
−1
−1
−γ −2 I − γ −2 P M
P C2 (D21 D21
) D21 B1 M x̂
−1
−1
B1 D21
(D21 D21
) D21B1 M x̂
−γ −2 I − γ −2 P M
−1
−1
P C2 (D21 D21
) (y − C2 x̂)
+ I − γ −2 P M
−1
−1
B1D21
(D21 D21
) (y − C2 x̂)
+ I − γ −2 P M
= Ax̂ + γ −2 B1 B1 M x̂ + B2 u
−1
) D21 B1 M x̂
−γ −2 T C2 (D21 D21
−1
(D21 D21
) D21 B1 M x̂
−γ −2 I + γ −2 T M B1 D21
−1
) (y − C2 x̂)
+T C2 (D21 D21
−1
(D21 D21
) (y − C2x̂)
+ I + γ −2 T M B1 D21
= Ax̂ + γ −2 B1 B1 M x̂ + B2 u
−1
) D21 B1 M x̂
(D21 D21
−γ −2 T C2 + I + γ −2 T M B1 D21
−1
) (y − C2 x̂)
(D21 D21
+ T C2 + I + γ −2 T M B1 D21
= Ax̂ + γ −2 B1 B1 M x̂ + B2 u
−1
(D21 D21
+ T C2 + γ −2 D21 B1 M
) D21 B1 M x̂
−γ −2 B1D21
−1
+ B1D21
+ T C2 + γ −2 D21 B1 M
) (y − C2x̂)
(D21 D21
−2
−2
−2
−1
B1 D21 + T C2 + γ D21 B1 M
(D21 D21 ) D21 B1 M x̂
= A + γ B1 B1 M − γ
−1
+B2u + B1 D21
(D21D21
+ T C2 + γ −2 D21 B1 M
) (y − C2 x̂)
(A.28)
よって, コントローラは
x̂˙ = Âx̂ + B2 u + B̂ (y − C2 x̂)
(A.29)
u = Ĉ x̂
(A.30)
A.4. 証明
95
ここで, Â, B̂, Ĉ は以下で与えられる.
 = A + γ −2 B1B1 M − γ −2 B̂D21 B1 M
−1
+ T (C2 + γ −2 D21B1 M) (D21 D21
)
B̂ = B1D21
D12 )
Ĉ = − (D12
−1
(B2 M + D12
C1 )
である.
A.4
証明
本節では, 定理 A.10 について十分性の証明を示す. リカッチ方程式 (A.3) とリカッチ方程
式 (A.10) が成立するとし, そのときのコントローラが (A.29), (A.30) 式で与えるとして, 有
界実補題の (A.8) 式が成立することを示す.
A.4.1
閉ループシステム
図 A.2 に示す閉ループシステム Tzw (s) の状態を [ x (x − x̂) ], 入力を w, 出力を z と
する. はじめに閉ループシステム Tzw (s) の状態空間表現を示す.
ẋ は次のように変形することができる.
ẋ = Ax + B1w + B2u
= Ax + B1w + B2Ĉ x̂
= Ax − B2 Ĉ (x − x̂) + B2 Ĉx + B1 w
= A + B2Ĉ x − B2 Ĉ (x − x̂) + B1 w
(A.31)
次に ẋ − x̂˙ は次のように変形することができる.
ẋ − x̂˙ = (Ax + B1 w + B2 u) − Âx̂ + B2 u + B̂ (y − C2x̂)
= Ax + B1 w − Âx̂ − B̂y + B̂C2 x̂
= Ax + B1 w − Âx̂ − B̂ (C2 x + D21 w) + B̂C2 x̂
= A − B̂C2 x + −Â + B̂C2 x̂ + B1 − B̂D21 w
= A − B̂C2 x − −Â + B̂C2 (x − x̂) + −Â + B̂C2 x + B1 − B̂D21 w
= A − Â x + Â − B̂C2 (x − x̂) + B1 − B̂D21 w
(A.32)
付録A
96
線形時不変システムに対する H∞ 制御
最後に, z は次のように変形することができる.
z = C1 x + D12u
= C1 x + D12Ĉ x̂
= C1 x − D12 Ĉ (x − x̂) + D12 Ĉx
= C1 + D12Ĉ x − D12Ĉ (x − x̂)
(A.33)
よって, (A.31) 式, (A.32) 式, (A.33) 式から閉ループシステムは次のようにまとめることが
できる.
ẋc = Acxc + Bc w
z = Cc x c
ここで, Ac , Bc , Cc は次のように与える.
A + B2 Ĉ −B2Ĉ
Ac =
A − Â Â − B̂C2
B1
Bc =
B1 − B̂D21
Cc = C1 + D12 Ĉ −D12 Ĉ
A.4.2
(A.34)
(A.35)
(A.36)
(A.37)
(A.38)
補足計算
ここでは,
Pc Ac + Ac Pc + γ −2 Pc Bc Bc Pc + Cc Cc
(A.39)
を求めるための準備をおこなう. ここでは, Pc , Ac , Bc , Cc を次のように定義する.
Pc(1,1) Pc(1,2)
A
B
Ac(1,2)
, Ac := c(1,1)
, Bc := c(1) , Cc := Cc(1) Cc(2)
Pc :=
Pc(2,1) Pc(2,2)
Ac(2,1) Ac(2,2)
Bc(2)
(A.40)
Pc Ac は次のように計算される.
Pc(1,1) Pc(1,2)
Ac(1,1) Ac(1,2)
Pc Ac =
Pc(2,1) Pc(2,2)
Ac(2,1) Ac(2,2)
Pc(1,1)Ac(1,1) + Pc(1,2)Ac(2,1) Pc(1,1)Ac(1,2) + Pc(1,2)Ac(2,2)
=
Pc(2,1)Ac(1,1) + Pc(2,2)Ac(2,1) Pc(2,1)Ac(1,2) + Pc(2,2)Ac(2,2)
(A.41)
A.4. 証明
97
また, Ac Pc = (Pc Ac ) であることから次のように計算される.
Pc(1,1)Ac(1,1) + Pc(1,2)Ac(2,1)
Pc(2,1)Ac(1,1) + Pc(2,2) Ac(2,1)
Ac Pc = (Pc Ac ) =
Pc(1,1)Ac(1,2) + Pc(1,2)Ac(2,2)
Pc(2,1)Ac(1,2) + Pc(2,2) Ac(2,2)
(A.42)
次に, Pc Bc Bc Pc = (Pc Bc ) (Bc Pc ) であることから, Pc Bc と Bc Pc は次のように計算される.
Pc(1,1) Pc(1,2)
Bc(1)
Pc(1,1)Bc(1) + Pc(1,2)Bc(2)
=
(A.43)
Pc Bc =
Pc(2,1) Pc(2,2)
Bc(2)
Pc(2,1)Bc(1) + Pc(2,2)Bc(2)
(A.44)
Bc Pc = (Pc Bc ) =
Pc(2,1) Bc(1) + Pc(2,2)Bc(2)
Pc(1,1)Bc(1) + Pc(1,2)Bc(2)
よって, Pc Bc Bc Pc は
Pc(1,1)Bc(1) + Pc(1,2) Bc(2)
Pc Bc Bc Pc =
Pc(2,1)Bc(1) + Pc(2,2) Bc(2)
·
Pc(2,1)Bc(1) + Pc(2,2)Bc(2)
Pc(1,1) Bc(1) + Pc(1,2) Bc(2)
Pc(1,1) Bc(1) + Pc(1,2) Bc(2) Pc(1,1)Bc(1) + Pc(1,2)Bc(2)
= Pc(2,1) Bc(1) + Pc(2,2) Bc(2) Pc(1,1)Bc(1) + Pc(1,2)Bc(2)
Pc(1,1)Bc(1) + Pc(1,2) Bc(2) Pc(2,1) Bc(1) + Pc(2,2) Bc(2)
(A.45)
Pc(2,1)Bc(1) + Pc(2,2) Bc(2) Pc(2,1) Bc(1) + Pc(2,2) Bc(2)
最後に, Cc Cc は次のようになる.
C Cc(1) Cc(1)Cc(2)
C
Cc Cc = c(1) Cc(1) Cc(2) = c(1)
Cc(2)
Cc(2)
Cc(1) Cc(2)
Cc(2)
(A.46)
付録A
98
線形時不変システムに対する H∞ 制御
よって, 以上をまとめると Pc Ac + Ac Pc + γ −2 Pc Bc Bc Pc + Cc Cc は次のようになる.
Pc Ac + Ac Pc + γ −2 Pc Bc Bc Pc + Cc Cc
Pc(1,1)Ac(1,1) + Pc(1,2)Ac(2,1) + Pc(1,1)Ac(1,1) + Pc(1,2)Ac(2,1)
+γ −2 Pc(1,1)Bc(1) + Pc(1,2)Bc(2) Pc(1,1) Bc(1) + Pc(1,2) Bc(2) + Cc(1)
Cc(1)
=
Pc(1,1)Ac(1,2) + Pc(1,2)Ac(2,2) + Pc(2,1) Ac(1,1) + Pc(2,2) Ac(2,1)
−2
+γ
Pc(1,1)Bc(1) + Pc(1,2)Bc(2) Pc(2,1)Bc(1) + Pc(2,2)Bc(2) + Cc(1)Cc(2)
Pc(1,1)Ac(1,2) + Pc(1,2)Ac(2,2) + Pc(2,1) Ac(1,1) + Pc(2,2)Ac(2,1)
+γ −2 Pc(1,1)Bc(1) + Pc(1,2)Bc(2) Pc(2,1)Bc(1) + Pc(2,2) Bc(2) + Cc(1)
Cc(2)
Pc(2,1)Ac(1,2) + Pc(2,2)Ac(2,2) + Pc(2,1) Ac(1,2) + Pc(2,2)Ac(2,2)
+γ −2 Pc(2,1)Bc(1) + Pc(2,2)Bc(2) Pc(2,1)Bc(1) + Pc(2,2) Bc(2) + Cc(2)
Cc(2)
(A.47)
A.4.3
証明
以下では, Pc Ac + Ac Pc + γ −2 Pc Bc Bc Pc + Cc Cc の (1, 1) 項, (2, 2) 項, (1, 2) 項について具
体的に導出する.
ここで, Pc を次のように与える.
Pc =
M
0
0
γ 2 T −1
(A.48)
はじめに, (1, 1) 項を導出する.
(1, 1) 項 = Pc(1,1) Ac(1,1) + Pc(1,2) Ac(2,1) + Pc(1,1)Ac(1,1) + Pc(1,2)Ac(2,1)
+γ −2 Pc(1,1)Bc(1) + Pc(1,2)Bc(2) Pc(1,1)Bc(1) + Pc(1,2) Bc(2) + Cc(1)
Cc(1)
(A.49)
Pc(1,2) = 0, Pc(2,1) = 0 より次式となる.
(1, 1) 項 = Pc(1,1)Ac(1,1) + Pc(1,1)Ac(1,1) + γ −2 Pc(1,1) Bc(1) Pc(1,1)Bc(1) + Cc(1)
Cc(1)
= Pc(1,1)Ac(1,1) + Ac(1,1)Pc(1,1) + γ −2 Pc(1,1)Bc(1) Bc(1)
Pc(1,1) + Cc(1)
Cc(1)
(A.50)
A.4. 証明
99
(A.36), (A.37), (A.38), (A.48) を代入する.
C1 + D12 Ĉ
(1, 1) 項 = M A + B2Ĉ + A + B2 Ĉ M + γ −2 MB1 B1 M + C1 + D12Ĉ
= M A + B2Ĉ + A + B2 Ĉ M + γ −2 MB1 B1 M
C1 + Ĉ D12
D12Ĉ
+C1 C1 + C1 D12 Ĉ + Ĉ D12
(A.51)
(A.31) 式を用いて Ĉ に代入する.
−1
(1, 1) 項 = M A − B2 (D12
D12 ) (B2 M + D12
C1 )
−1
+ A − B2 (D12 D12 ) (B2 M + D12 C1 ) M
+γ −2 MB1 B1 M + C1 C1 − C1 D12 (D12
D12 )
−1
(B2 M + D12
C1 )
−1
C1) (D12
D12 ) D12
C1
− (B2 M + D12
−1
−1
+ − (D12D12 ) (B2M + D12 C1) D12 D12 − (D12 D12 ) (B2 M + D12 C1 )
(A.52)
各項を展開する.
−1
B2 (D12
D12 )
D12
C1
−1
− MB2 (D12
(1, 1) 項 = M A −
D12 ) B2 M
−1
−1
D12 ) D12
C1 M − MB2 (D12
D12 ) B2 M
+ A − B2 (D12
+γ −2 MB1 B1 M + C1 C1
−C1 D12 (D12
D12 )
−MB2 (D12
D12 )
−1
−1
B2 M − C1 D12 (D12
D12 )
−1
D12
C1
D12
C1 − C1 D12 (D12
D12 )
−1
D12
C1
−1
+ (B2 M + D12
C1 ) (D12
D12 ) (B2 M + D12
C1 )
−1
−1
D12 ) D12
C1 − MB2 (D12
D12 ) B2 M
= M A − B2 (D12
−1
−1
D12 ) D12
C1 M − MB2 (D12
D12 ) B2 M
+ A − B2 (D12
(A.53)
+γ −2 MB1 B1 M + C1 C1
B2 M − C1 D12 (D12
D12 )
−1
D12
C1
−1
D12
C1 − C1 D12 (D12
D12 )
−1
D12
C1
−1
B2 M + MB2 (D12
D12 )
−C1 D12 (D12
D12 )
−MB2 (D12
D12 )
+MB2 (D12
D12 )
+C1 D12 (D12
D12 )
−1
−1
−1
B2 M + C1 D12 (D12
D12 )
D12
C1
−1
D12
C1
(A.54)
付録A
100
=M A−
−1
B2 (D12
D12 )
D12)
−MB2 (D12
−1
D12
C1
+ A−
線形時不変システムに対する H∞ 制御
−1
B2 (D12
D12 )
D12
C1
M
B2 M + γ −2 MB1 B1 M + C1 C1 − C1 D12 (D12
D12 )
−1
−1
−1
D12
C1
(A.55)
D12 ) D12
C1 + A − B2 (D12
D12 ) D12
C1 M
= M A − B2 (D12
−1
−1
−M B2 (D12
D12 B2 ) − γ −2 B1 B1 M + C1 I − D12 (D12
D12 ) D12
C1
(A.56)
よって, リカッチ方程式 (A.3) を用いることにより (1, 1) 項 = 0 であることがわかる.
次に, (2, 2) 項を導出する.
(2, 2) 項 = Pc(2,1)Ac(1,2) + Pc(2,2)Ac(2,2) + Pc(2,1) Ac(1,2) + Pc(2,2)Ac(2,2)
+ Pc(2,1)Bc(1) + γ −2 Pc(2,2)Bc(2) Pc(2,1)Bc(1) + Pc(2,2) Bc(2) + Cc(2)
Cc(2)
(A.57)
Pc(1,2) = 0, Pc(2,1) = 0 より次式となる.
(2, 2) 項 = Pc(2,2) Ac(2,2) + Ac(2,2)Pc(2,2) + γ −2 Pc(2,2) Bc(2)Bc(2)
Pc(2,2) + Cc(2)
Cc(2) (A.58)
(A.36), (A.37), (A.38), (A.48) を代入する.
(2, 2) 項 = γ 2 T −1 Â − B̂C2 + γ 2 Â − B̂C2 T −1
−D12 Ĉ
+γ −2 γ 2 T −1 B1 − B̂D21 B1 − B̂D21
γ 2T −1 + −D12Ĉ
(A.59)
(A.31) 式, (A.31) 式を用いて, Â, Ĉ に代入する.
2 −1
−2
−2
A + γ B1 B1 M − γ B̂D21 B1 M − B̂C2
(2, 2) 項 = γ T
+γ 2 A + γ −2 B1 B1 M − γ −2 B̂D21 B1 M − B̂C2 T −1
2 −1
+γ T
B1 B1 − B1 D21 B̂ − B̂D21B1 − B̂D21D21 B̂ T −1
−1
−1
+ − (D12
D12 ) (B2 M + D12
C1) D12
D12 − (D12
D12 ) (B2 M + D12
C1 )
(A.60)
= γ 2T −1 A + γ −2 B1B1 M − B̂ C2 + γ −2 D21 B1 M
−1
T
+γ 2 A + γ −2 B1 B1 M − B̂ C2 + γ −2 D21 B1 M
2 −1
B1 B1 − B1 D21 B̂ − B̂D21B1 − B̂D21D21 B̂ T −1
+γ T
+ (B2 M + D12
C1) (D12
D12 )
−1
(B2 M + D12
C1 )
(A.61)
A.4. 証明
101
(A.31) 式を用いて B̂ に代入する.
(2, 2) 項 = γ 2 T −1 A + γ −2 B1 B1 M
−1
C2 + γ −2 D21 B1 M
+ T (C2 + γ −2 D21B1 M) (D21 D21
)
− B1D21
+γ 2 A + γ −2 B1B1 M
−1
−1
+ T (C2 + γ −2 D21B1 M) (D21 D21
)
T
C2 + γ −2 D21 B1 M
− B1D21
+γ 2 T −1B1 B1 T −1 − γ 2 T −1B1 D21
B̂ T −1
−γ 2T −1 B̂D21B1 T −1 + γ 2 T −1B̂D21D21
B̂ T −1
−1
+ (B2 M + D12
C1 ) (D12
D12 )
(B2 M + D12
C1 )
(A.62)
さらに, (A.31) 式を用いて B̂ に代入して, 各項をまとめると以下のようになる.
−1
(2, 2) 項 = γ 2 T −1 A + γ −2 B1 B1 M − B1 D21
(D21 D21
)
C2 + γ −2 D21 B1 M
−2
−1
−2
C2 + γ D21 B1M
− T C2 + γ D21 B1 M (D21 D21 )
−1
+γ 2 A + γ −2 B1 B1 M − B1D21
(D21D21
)
C2 + γ −2 D21 B1 M
−1
−2
−1
−2
− T C2 + γ D21 B1 M (D21 D21 )
T
C2 + γ D21 B1M
+γ 2 T −1B1 B1 T −1
2 −1
−2
−1
−γ T B1 D21 B1 D21 + T (C2 + γ D21 B1M) (D21 D21 )
T −1
−1
−γ 2 T −1 B1 D21
+ T (C2 + γ −2 D21 B1 M) (D21 D21
) D21 B1 T −1
−1
+γ 2 T −1 B1D21
+ T (C2 + γ −2 D21B1 M) (D21 D21
)
· B1D21
+ T (C2 + γ −2 D21B1 M) T −1
+ (B2 M + D12
C1) (D12
D12 )
−1
(B2 M + D12
C1 )
(A.63)
付録A
102
線形時不変システムに対する H∞ 制御
−1
= γ 2 T −1 A + γ −2 B1 B1 M − B1 D21
(D21 D21
)
C2 + γ −2 D21B1 M
−1
)
C2 + γ −2 D21 B1 M
−γ 2 C2 + γ −2 D21 B1 M (D21 D21
−1
−1
+γ 2 A + γ −2 B1 B1 M − B1 D21
(D21 D21
)
T
C2 + γ −2 D21 B1 M
−1
C2 + γ −2 D21 B1 M
−γ 2 C2 + γ −2 D21 B1 M (D21 D21
)
+γ 2 T −1B1 B1 T −1
−γ 2T −1 B1 D21
(D21 D21
)
−1
D21 B1 T −1 − γ 2 T −1B1 D21
(D21 D21
)
(D21 D21
)
−γ 2T −1 B1 D21
−1
D21 B1 T −1 − γ 2 (C2 + γ −2 D21B1 M) (D21 D21
)
−1
D21 B1 T −1
+γ 2 T −1B1 D21
(D21 D21
)
+γ 2 (C2 + γ −2 D21 B1 M) (D21 D21
)
+γ 2 T −1B1 D21
(D21 D21
)
−1
(C2 + γ −2 D21 B1 M)
−1
D21
B1 T −1
D21 B1 T −1
(C2 + γ −2 D21 B1 M)
)
+γ 2 (C2 + γ −2 D21 B1 M) (D21 D21
−1
−1
C1 ) (D12
D12)
+ (B2 M + D12
−1
−1
(C2 + γ −2 D21 B1 M)
(B2 M + D12
C1 )
(A.64)
式整理をおこなうと以下のようになる.
−1
(2, 2) 項 = γ 2 T −1 A + γ −2 B1B1 M − B1 D21
(D21 D21
)
C2 + γ −2 D21 B1 M
−1
−1
+γ 2 A + γ −2 B1 B1 M − B1 D21
(D21 D21
)
T
C2 + γ −2 D21B1 M
+γ 2 T −1 B1B1 T −1 − γ 2T −1 B1 D21
(D21 D21
)
−γ 2 (C2 + γ −2 D21 B1 M) (D21 D21
)
−1
−1
D21 B1 T −1
(C2 + γ −2 D21 B1 M)
−1
+ (B2 M + D12
C1) (D12
D12 ) (B2 M + D12
C1 )
(A.65)
−1
(D21 D21
)
C2 + γ −2 D21 B1 M
= γ 2 T −1 A + γ −2 B1B1 M − B1 D21
−1
−1
(D21 D21
)
T
C2 + γ −2 D21B1 M
+γ 2 A + γ −2 B1 B1 M − B1 D21
−1
+γ 2 T −1 B1 I − D21
(D21 D21
) D21 B1 T −1
−γ 2 (C2 + γ −2 D21 B1 M) (D21 D21
)
−1
−1
(C2 + γ −2 D21 B1 M)
C1) (D12
D12 ) (B2 M + D12
C1 )
(A.66)
+ (B2 M + D12
−1
(D21 D21
)
C2 + γ −2 D21 B1 M
= γ 2 T −1 T A + γ −2 B1B1 M − B1 D21
−1
+ A + γ −2 B1 B1 M − B1 D21
(D21 D21
)
C2 + γ −2 D21 B1 M T
−1
−T C2 + γ −2 D21 B1 M (D21 D21
)
C2 + γ −2 D21 B1 M
−1
−2
− γ (MB2 + C1 D12 ) (D12 D12 ) (MB2 + C1 D12 ) T
−1
+B1 I − D21
(D21 D21
) D21 B1 T −1
(A.67)
A.4. 証明
103
よって, リカッチ方程式 (A.10) を用いることにより (2, 2) 項 = 0 であることがわかる.
最後に, (1, 2) 項を導出する. (2, 1) 項は (1, 2) 項の対称であるので, (1, 2) 項から (2, 1) 項
も同時にわかる.
(1, 2) 項 = Pc(1,1)Ac(1,2) + Pc(1,2)Ac(2,2) + Pc(2,1) Ac(1,1) + Pc(2,2)Ac(2,1)
+γ −2 Pc(1,1)Bc(1) + Pc(1,2)Bc(2) Pc(2,1)Bc(1) + Pc(2,2) Bc(2) + Cc(1)
Cc(2)
(A.68)
Pc(1,2) = 0, Pc(2,1) = 0 より次式となる.
(1, 2) 項 = Pc(1,1)Ac(1,2) + Ac(2,1)Pc(2,2) + γ −2 Pc(1,1)Bc(1) Pc(2,2) Bc(2) + Cc(1)
Cc(2)
(A.69)
(A.36), (A.37), (A.38), (A.48) を代入する.
2
(1, 2) 項 = M −B2 Ĉ + γ A − Â T
−D12 Ĉ
+ C1 + D12 Ĉ
−1
+ MB1 B1 − B̂D21
T −1
(A.70)
(A.31) 式を用いて Â に代入する.
(1, 2) 項 = −MB2 Ĉ + γ 2 −B1 B1 M/γ 2 + B̂D21 B1 M/γ 2 T −1
+MB1 B1 − B̂D21 T −1 − C1 D12 Ĉ − ĈD12 D12 Ĉ
(A.71)
(A.31) 式を用いて Ĉ に代入する.
(1, 2) 項 = −MB2 Ĉ − MB1 B1 − B̂D21 T −1
+MB1 B1 − B̂D21 T −1 − C1 D12 Ĉ − (B2 M + D12
C1) Ĉ
=0
(A.72)
よって, (1, 2) 項 = 0, (2, 1) 項 = 0 であることがわかる.
したがって,
Pc Ac + Ac Pc + γ −2 Pc Bc Bc Pc + Cc Cc = 0
(A.73)
が成立する. ゆえに, 有界実補題 A.3 から定理 A.10 の十分性を証明することができた.
104
謝辞
謝辞
本研究を進めるにあたり, 学士から博士後期課程までの 6 年間, 暖かい指導と様々な機会
を与えてくださった金沢大学 藤田政之 教授に心より深く感謝いたします. ならびに, 多く
の御指導と助言をいただきました長岡技術科学大学 滑川徹 助教授, 金沢大学 東剛人 助手
に深く感謝いたします.
本論文をまとめるにあたり御指導いただきました金沢大学 伊藤俊次 教授, 木村春彦 教授,
村本健一郎 教授, 山根智 教授に心から感謝いたします.
ドイツ留学の際には, 研究から生活までお世話なった Wuppertal 大学 Bernd Tibken 教
授に感謝いたします. また, Dr. Kamil Fatih Dilaver と Dr. Ossama Hachicho をはじめと
する Tibken 教授の研究室メンバーにも大変お世話になり感謝しています.
そして, 日頃から様々なご協力をいただいた (株)IMV の 内山泰宏 氏, 法政大学 河合宏之
氏, ならびに, 内藤浩之 氏, 向井正和 氏をはじめとする藤田研究室のメンバーに感謝します.
最後に, これまでの研究生活を可能にし, 暖かく見守っていただいた両親, 兄弟に深く感
謝します.
105
参考文献
[1] F. Amato, M. Mattei and A. Pironti, “Guaranteeing Cost Strategies for Linear
Quadratic Differential Games under Uncertain Dynamics,” Automatica, vol. 38, no.
3, pp. 507–515, 2002.
[2] M. Athans, “The Role and Use of the Stochastic Linear Quadratic Gaussian Problem
in Control Systems Design,” IEEE Trans. on Automatic Control, vol. 16, no. 12, pp.
529–552, 1971.
[3] M. Athans, D. Castanon, K. Dunn, C. S. Greene, W. H. Lee, N. R. Sandell, Jr. and
A. S. Willsky, “The Srochastic Control of the F-8C A-rcraft using a Multiple Model
Adaptice Control (MMAC) Method – Part1: Equilibrium Flight,” IEEE Trans. on
Automatic Control, vol. 22, no. 5, pp. 768–780, 1977.
[4] 東, 渡辺, 内田, “不確かなパラメータとスケジューリングパラメータを持つ線形システム
に対するロバスト H∞ 制御,” システム制御情報学会論文誌, vol. 11, no. 6, pp. 297–305,
1998.
[5] 東, 渡辺, 内田, “自己スケジューリングパラメータを持つ線形システムの準大域的な L2
ゲイン解析,” システム制御情報学会論文誌, vol. 12, no. 11, pp. 639–646, 1999.
[6] T. Azuma, R. Watanabe, K. Uchida and M. Fujita, “A New LMI Approach to Analysis of Linear Systems Depending on Scheduling Parameter in Polynominal Forms,”
Automatisierungstechnik, vol. 48, no. 4, pp. 199–204, 2000.
[7] G. J. Balas, J. C. Doyle, K. Glover, A. Packard and R. Smith, µ-Analysis and Synthesis
Toolbox Use’s Guide, The MathWorks, Inc. , 1993.
[8] G. J. Balas, R. Chiang, A. Packard and M. Safonov, Robust Control Toolbox Use’s
Guide, The MathWorks, Inc. , 2004.
参考文献
106
[9] H. Berghuis and H. Nijmeijer, “A Passivity Approach to Controller-Observer Design
for Robots,” IEEE Trans. on Robotics and Automation, vol. 9, no. 6, pp. 740–754,
1993.
[10] R. Bhattacharya, G. J. Balas, M. A. Kaya and A. Packard, “Nonlinear Receding Horizon Control of an F-16 Aircraft,” Journal of Guidance, Control, and Dynamics, vol.
25, no. 5, pp. 924–931, 2002.
[11] R. R. Bitmead, M. Gevers and V. Wertz, Adaptive Optimal Control, Prentice Hall,
1990.
[12] C. Chen and L. Shaw, “On Receding Horizon Feedback Control,” Automatica, vol. 18,
pp. 349–352, 1982.
[13] H. Chen and F. Allogower, “A Quasi-Infinite Horizon Nonlinear Model Predictive Control Scheme with Guaranteed Stability,” Automatica, vol. 34, no. 10, pp. 1205–1217,
1998.
[14] R. Y. Chiang and M. G. Safonov, Robust Control Tollbox Use’s Guide, The MathWorks,
Inc. , 1988.
[15] J. C. Doyle, “Guaranteed Margins for LQG Regulators,” IEEE Trans. on Automatic
Control, vol. 23, no. 4, pp. 756–757, 1978.
[16] J. C. Doyle, K. Glover, P. P. Khargonekar and B. A. Francis, “State-Space Solutions
to Standard H2 and H∞ Control Problems,” IEEE Trans. on Automatic Control, vol.
34, no. 8, pp. 831–847, 1989.
[17] G. E. Dullerud and S. Lall, “A New Approach for Analysis and Synthesis of TimeVarying Systems,” IEEE Trans. on Automatic Control, vol. 44, no. 8, pp. 1486–1497,
1999.
[18] G. E. Dullerud and F. Paganini, A Course in Robust Control Theory, Springer-Verlag,
2000.
[19] P, Gahinet and P. Apkarian, “A Linear Matrix Inequality Approach to H∞ Control,”
International Journal of Robust and Nonlinear Control, vol. 4, pp. 421–448, 1994.
107
[20] P, Gahinet, A. Nemirovski, A. J. Laub and M. Chilali, LMI Control Toolbox Use’s
Guide, The MathWorks, Inc. , 1995.
[21] C. E. Garcia, D. M. Prett and M. Morari, “Model Predictive Control: Theory and
Practice – a Survey,” Automatica, vol. 25, no. 3, pp. 335–348, 2004.
[22] P. E. Gill, W. Murray, M. A. Saunders and M. H. Wright, User’s Guide for NPSOL
5.0: a Fortran Package for Nonlinear Programming, Stanford University, 1998.
[23] K. Glover and J. C. Doyle, “State-space Formulae for All Stabilizing Controllers that
Satisfy an H∞ -norm Bound and Relations to Risk Sensitivity,” Systems and Control
Letters, vol. 11, no. 3, pp. 167–172, 1988.
[24] O. Hachicho and B. Tibken, “Estimating Domains of Attraction of a Class of Nonlinear
Dynamical Systems with LMI Methods based on the Theory of Moments,” Proc. of
41th IEEE Conference on Decision and Control, pp. 3150-3155, 2002.
[25] S. Hutchinson, C. D. Hager and P. I. Corke, “A Tutorial on Visual Servo Control,”
IEEE Trans. on Robotics and Automation, vol. 12, no. 5, pp. 651–669, 1996.
[26] A. Jadbabaie, “Receding Horizon Control of Nonlinear Systems: A Control Lyapunov
Function Approach,” Ph.D. Thesis, California Institute of Technology, 2000.
[27] A. Jadbabaie, J. Yu and J. Hauser, “Unconstrained Receding-horizon Control of Nonlinear Systems,” IEEE Trans. on Automatic Control, vol. 46, no. 5, pp. 776–783, 2001.
[28] A. Jadbabaie and J. Hauser, “Control of a Thrust-vectored Flying Wing: a Receding
Horizon – LPV Approach,” International Journal of Robust Nonlinear Control, vol. 12,
pp. 869–896, 2002.
[29] A. Jaritz and M. Spong, “An Experimental Comparison of Robust Control Algorithms
on a Direct Drive Manipulator,” IEEE Trans. on Control Systems Technology, vol. 4,
no. 6, pp. 627–640, 1996.
[30] H. Kawai, S. Izoe and M. Fujita, “A Passivity Approach to Vision-based Dynamical
Control of Robots with Nonlinear Observer,” Control Problems in Robotics, A. Bicchi,
H. I. Christensen and D. Prattichizzo (Eds.), Springer-Verlag, pp. 199–213, 2003.
参考文献
108
[31] S. Keerthi and E. Gilbert, “Optimal Infinite-horizon Feedback Laws for a General Class
of Constrained Discrete-time Systems: Stability and Moving-horizon Approximations,”
Journal of Optimization Theory and Applications, vol. 57, pp. 265–293, 1988.
[32] H. K. Khalil, Nonlinear Systems, Macmillan (1992).
[33] P. P. Khargonekar, I. R. Petersen and K. Zhou, “Robust Stabilization of Uncertain
Linear System: Quadratic Stabilizability and H∞ Control Theory,” IEEE Trans. on
Automatic Control, vol. 35, no. 9, pp. 356–361, 1990.
[34] K. B. Kim, T. Yoon and W. H. Kwon, “Stabilizing Receding Horizon H∞ Controls for
Linear Continuous Time-Varying Systems,” IEEE Trans. on Automatic Control, vol.
46, no. 8, pp. 1273–1279, 2001.
[35] D. L. Kleinman, “An Easy Way to Stabilieze a Linear Constant System,” IEEE Trans.
on Automatic Control, vol. 15, pp. 692, 1970.
[36] 児島, 藤田, 内田, 示村, “線形 2 次形式微分ゲームと H∞ 制御–平方完成を用いた直接的
アプローチ–,” 計測自動制御学会論文集,vol. 28, no. 5, pp. 570–577, 1992.
[37] W. H. Kwon and A. E. Pearson, “A Modified Quadratic Cost Problem and Feedback
Stabilization of a Lienar System,” IEEE Trans. on Automatic Control, vol. 22, no. 5,
pp. 838–840, 1977.
[38] W. H. Kwon, A. N. Bruckstein and T. Kailath, “Stabilizing State Feedback Design
via the Moving Horizon Method,” International Journal of Control, vol. 37, no. 3, pp.
631–643, 1983.
[39] S. Lall and K. Glover, “A Game Theoretic Approach to Moving Horizon Control,”
Advances in Model-Based Predictive Control, D. W. Clarke (Eds.), Oxford University
Press, pp. 131–144, 1994.
[40] S. Lall, “Robust Control Synthesis in the Time Domain,” Ph.D. Thesis, Cambridge
University, 1995.
[41] D. J. N. Limebeer, B. D. O. Anderson, P. P¿ Khargonekar and M. Green, “A Game
Theoretic Approach to H∞ Control for Time-Varying Systems,” SIAM Journal on
Control and Optimization, vol. 30, no. 2, pp. 262–283, 1992.
109
[42] L. Magni and R. Sepulchre, “Stability Margins of Nonlinear Receding-horizon Control
via Inverse Optimality,” Systems and Control Letters, vol. 32, no. 4, pp. 241–245, 1997.
[43] D. Q. Mayne and H. Michalska, “Receding Horizon Control of Nolinear Systems,” IEEE
Trans. on Automatic Control, vol. 35, no. 7, pp. 814–824, 1990.
[44] D. Q. Mayne, J. B. Rawlings, C. V. Rao and P. O. M. Scokaert, “Constrained Model
Predictive Control: Stability and Optimality,” Automatica, vol. 36, no. 6, pp. 789–814,
2000.
[45] H. Michalska and D. Q. Mayne, “Robust Receding Horizon Control of Constrained
Nonlinear Systems,” IEEE Trans. on Automatic Control, vol. 38, no. 11, pp. 1623–
1633, 1993.
[46] M. B. Milam, “Real-Time Optimal Trajectory Generation for Constrained Dynamical
Systems,” Ph.D. Thesis, California Institute of Technology, 2003.
[47] R. M. Murray, J. Hauser, A. Jadbabaie, M. B. Milan, N. Petit, W. B. Dunbar and
R. Franz, “Online Control Customization via Optimization-Based Control,” SoftwareEnabled Control, T. Samad and G. Balas (Eds.), IEEE Press, pp. 149–174, 2003.
[48] G. De Nicolao, L. Magni and R. Scattolini, “Stabilizing Receding-horizon Control of
Nonlinear Time-varying Systems,” IEEE Trans. on Automatic Control, vol. 43, no, 7,
pp. 1030–1036, 1998.
[49] T. Ohtsuka, “A Continuation/GMRES Method for Fast Computation of Nonlinear
Receding Horizon Control,” Automatica, vol. 40, no. 4, pp. 563–574, 2004.
[50] 大塚, “非線形最適フィードバック制御のための実時間最適化手法,” 計測と制御, vol. 36,
no. 11, pp. 776–783, 1997.
[51] R. Ortega and M. W. Spong, “Adaptive Motion Control of Rigid Robots: a Tutorial,”
Automatica, vol. 25, no. 6, pp. 877–888, 1989.
[52] A. Packard, “Gain Scheduling via Linear Fractional Trandformation,” Systems and
Control Letters, vol. 22, pp. 79–92, 1994.
[53] B. Paden and R. Panja, “Globally Asymptotically Stable PD+ Controller for Robot
Manipulators,” Internatinal Journal of Control, vol. 47, no. 6, pp. 1697–1712, 1988.
参考文献
110
[54] T. Parisini and R. Zoppoli, “A Receding-horizon Regulator for Nonlinear Systems and
a Neural Approximation,” Automatica, vol. 31, no. 10, pp. 1443–1451, 1995.
[55] C. Pirie and G. E. Dullerud, “Robust Controller Synthesis for Uncertain Time-Varying
Systems,” SIAM Journal of Control and Optimization, vol. 40, no. 4, pp. 1312–1331,
2002.
[56] S. Prajna, A. Papachristodoulou and P. A. Parrilo, SOSTOOLS: Sum of Squares Optimization Toolbox for MATLAB Use’s Guide, 2002.
[57] J. A. Primbs, V. Nevistic and J. C. Doyle, “A Receding Horizon Generalization of
Pointwise Min-Norm Controllers,” IEEE Trans. on Automatic Control, vol. 45, no. 5,
pp. 898–909, 2000.
[58] J. A. Primbs, “Nonlinear Optimal Control: A Receding Horizon Approach,” Ph.D.
Thesis, California Institute of Technology, 1999.
[59] J. B. Rawlings and K. R. Muske, “The Stability of Constrained Receding Horizon
Control,” IEEE Trans. on Automatic Control, vol. 38, no. 10, pp. 1512–1516, 1993.
[60] W. Rugh, Linear System Theory, Prentice-Hall, 1996.
[61] A. L. Schwartz, “Theory and Implementation of Numeriocal Methods based on RungeKutta Integration for Solving Optimal Control Problems,” Ph.D. Thesis, University of
California at Berkeley, 1996.
[62] A. L. Schwartz, E. Polak and Y. Chen, A Matlab Toolbox for Solving Optimal Control
Problems, 1997.
[63] J. J. Slotine and W. Li, “On the Adaptive Control of Robot Manipulators,” International Journal of Robotics Research, vol. 6, pp. 49–59, 1987.
[64] E. D. Sontag, “A ’Universal’ Construction of Artstein’s Theorem on Nonlinear stabilization,” Systems and Control Letters, vol. 13, no. 2, pp. 117–123, 1989.
[65] M. Sznaier and M. J. Damborg, “Heuristically Enhanced Feedback Control of Constrained Discrete-time Linear Systems,” Automatica, vol. 26, no. 3, pp. 521–532, 1990.
[66] M. Sznaier and J. Cloutier, “Model Predictive Control of Nonlinear Parameter Varying Systems via Receding Horizon Control Lyapunov Functions,” Nonlinear Predictive
111
Control –Theory and Practice–, B. Kouvaritakis and M. Cannon (Eds.), The Institution
of Electrical Engineers, pp. 81–106, 2001.
[67] G. Tadmor, “Worst-case Design in the Time Domain: the Maximum Principle and the
Standard H∞ Problem,” Math. Control Signals Systems, vol. 3, pp. 301–324, 1989.
[68] G. Tadmor, “Receding Horizon Revisited: An Easy Way to Robustly Stabilize an LTV
System,” Systems and Control Letters, vol. 18, no. 4, pp. 285–294, 1992.
[69] M. Takegaki and S. Arimoto, “A New Feedback Method for Dynamic Control of Manipulators,” ASME Journal of Dynamic Systems, Measurement, and Control, vol. 102,
pp. 119–125, 1981.
[70] Y. A. Thomas, “Linear Quadratic Optimal Estimation and Control with Receding
Horizon Control,” Electronic Letters, vol. 11, pp. 19–21, 1975.
[71] B. Tibken and K. F. Dilaver, “Computation of Subsets of the Domain of Attraction
for Polynomial Systems,” Proc. of 41th IEEE Conference on Decision and Control, pp.
2651-2656, 2002.
[72] K. Uchida and M. Fujita, “On the Central Controller: Characterizations via Differential
Games and LEQG Control Problems,” Systems and Control Letters, vol. 13, no. 1, pp.
9–13, 1989.
[73] 内田,藤田, “H∞ 制御理論とゲーム理論,” 計測と制御,vol. 29, no. 2, pp. 136–141,
1990.
[74] K. Uchida and M. Fujita, “Finite Horizon H∞ Control Problems with Terminal Penalties,” IEEE Trans. on Automatic Control, vol. 37, no. 11, pp. 1762–1767, 1992.
[75] F. Wu, Hua Xin Yang, A. Packard, G. Becker, “Induced L2 -Norm Control for LPV Systems with Bounded Parameter Variation,” International Journal of Robust Nonlinear
Control, vol. 6, pp. 983–998, 1996.
[76] J. Yu, A. Jadbabaie, J. Primbs and Y. Huang, “Comparison of Nonlinear Design Techniques on a Model of the Caltech Ducted Fan,” Automatica, vol. 37, no.12, pp. 1971–
1978, 2001.
参考文献
112
[77] H. Zhang and J. P. Ostrowski, “Visual Motion Planning for Mobile Robots,” IEEE
Trans. on Robotics and Automation, vol. 18, no. 2, pp. 199–208, 2002.
[78] K. Zhou, “On the Parametrization of H∞ Controllers,” IEEE Trans. on Automatic
Control, vol. 37, no. 9, pp. 1442–1446, 1992.
[79] K. Zhou and J. C. Doyle, Essentials of Robust Control, Prentice-Hall, 1998.
113
本研究に関する発表論文
• 研究論文
[1] 河合, 東, 藤田, “一般化終端不等式条件を用いた線形時変システムに対する出力フィー
ドバック Receding Horizon H∞ 制御,” 計測自動制御学会論文集, vol. 40, no. 6, pp.
656–663, 2004.
• 国際会議
[2] Y. Kawai, T. Azuma and M. Fujita, “Comparison of Stabilizing Receding Horizon
Control on a Direct Drive Manipulator,” Proc. of 16th IFAC World Congress on
Automatic Control, Prague, Czech Republic, July 2005. (to appear)
[3] Y. Kawai, H. Hirano, T. Azuma and M. Fujita, “Visual Feedback Control of an
Unmanned Planar Blimp System with Self-scheduling Parameter via Receding Horizon
Approach,” Proc. of 2004 IEEE International Conference on Control Applications,
pp. 1603–1608, Taipei, Taiwan, Sep. 2004.
[4] H. Hirano, Y. Kawai and M. Fujita, “Automated Driving for an Experimental Vehicle
using Visual Feedback Control,” Proc. of 42nd SICE Annual Conference, pp. 674–
679, Fukui, Japan, Aug. 2003.
[5] Y. Kawai, S. Kitagawa, S. Izoe and M. Fujita, “An Unmanned Planar Blimp on Visual
Feedback Control : Experimental Results,” Proc. of 42nd SICE Annual Conference,
pp. 680–685, Fukui, Japan, Aug. 2003.
[6] Y. Kawai, T. Azuma and M. Fujita, “Stabilizing Receding Horizon H∞ Control for
LTV Systems using Extended Terminal Inequality Conditions,” Proc. of 41st IEEE
Conference on Decision and Control, pp. 3452–3457, Las Vegas, Nevada, Dec. 2002.
[7] Y. Kawai, T. Azuma and M. Fujita, “Output Feedback Design for LTV Systems via
Stabilizing Receding Horizon H∞ Control with a Terminal Penalty,” Proc. of 40th
本研究に関する発表論文
114
IEEE Conference on Decision and Control, pp. 4298–4299, Orlando, Florida, Dec.
2001.
[8] H. Kawai, Y. Kawai and M. Fujita, “Visual Feedback Control of Planar Manipulators
Based on Nonlinear Receding Horizon Control Approach,” Proc. of 2001 American
Control Conference, pp. 763–768, Arlington, Virginia, June 2001.
• 国内会議
[8] 河合康典, 東剛人, 藤田政之, “SICE-DD アームによる安定性を保証した非線形 Receding
Horizon 制御,” 第 33 回 SICE 制御理論シンポジウム 資料, 浜松, pp. 265–268, Nov.
2004.
[9] 河合康典, 藤田政之, “一般化終端不等式条件を用いた Receding Horizon H∞ 制御,”
SICE 第 2 回 制御部門大会 資料, 千葉, pp. 363–366, May 2002.
[10] 河合康典, 藤田政之, “LTV システムにおける出力フィードバック Receding Horizon
H∞ 制御の安定性に関する一考察,” 第 30 回 SICE 制御理論シンポジウム 資料, 別府,
pp. 215–218, Nov. 2001.
[11] 藤田政之, 河合康典, “Control Lyapunov 関数を用いたマニピュレータの Receding
Horizon 制御に関する一考察,” 第 39 回 SICE 学術講演会予稿集, 飯塚, 106A-1, Aug.
2000.
© Copyright 2026 Paperzz