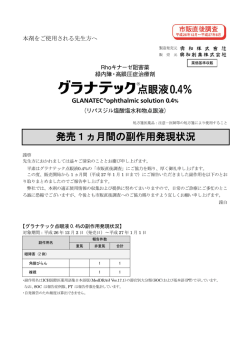
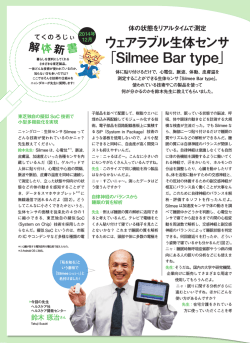
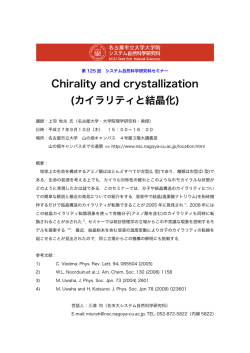
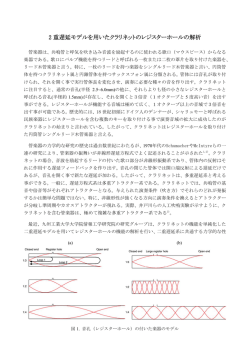
論文 HEV/EV向けリチウムイオン電池の充電率とパラメータの同時推定 State of Charge and Parameter Estimation of Lithium-ion Batteries for HEVs and EVs 馬場 厚志 * 板橋 欣之介 * 寺西 望 * 枝本 吉広 * Atsushi Baba Kinnosuke Itabashi Nozomu Teranishi Yoshihiro Edamoto 長村 謙介 * 丸田 一郎 ** 足立 修一 *** Kensuke Osamura Ichiro Maruta Shuichi Adachi Abstract This paper discusses the accuracy of the simultaneous state of charge (SOC) and parameter estimation method of the batteries for hybrid electric vehicles (HEVs) and electric vehicles (EVs) use. Although it is important to determine the battery aging, to control the charging and the discharging, and/or to maintain battery fault detections, the accuracy of the parameter estimation has not been thoroughly discussed. To address this issue, physico-chemical study using simultaneous state and log-normalized parameter estimation of batteries is provided in this paper. The proposed method is verified by performing a series of experiments using an EV. Key Words : EV and HV System, State of Charge (SOC), Unscented Kalman Filter (UKF), State of Health (SOH), Diffusion Coefficient, Arrhenius Equation (A3) 1. は じ め に 方法 (7),忘却要素付きの逐次最小二乗法を用いた方法 (8) リチウムイオン電池は,ハイブリッド自動車(Hybrid などがある. Electric Vehicle, 以 下 HEV) や 電 気 自 動 車(Electric これらの電池の SOC とパラメータの推定法を評価す Vehicle, 以下 EV)などの電動車に搭載されるようにな るうえで課題となるのが,パラメータ推定精度の評価方 り,重要性を増してきている.リチウムイオン電池に蓄 法である.SOC の場合には,実際の電池を使った実験で えられた電気エネルギーを効率的かつ安全に使用する上 も,条件を整えることにより“真値”とみなしてよい参 で必要不可欠な技術が“電池マネジメント”である (1), (2) . 照値を得ることができるので,真値からの誤差として推 電池マネジメントにおける中心的課題は,電池の充電 定精度を議論できる.しかし,パラメータについてはそ 率(State Of Charge, 以下 SOC)とパラメータの逐次的 のような“真値”を得ることができないので,別の方法 な推定である.SOC を正確に推定することで,運転者 が必要になる. に正しい電池残量の情報をリアルタイムに提供できる . この課題に対して,従来は, 一方の電池の“パラメータ”とは電池の健全度(State ① 経験的に妥当な推定値になっているか評価する (1), (8) Of Health, 以下 SOH)や内部抵抗,電池内の電気化学反 ② 電池モデルを真として,その電池モデルのパラメー (3) 応の時定数などのことである.これらのパラメータは劣 化診断や充放電制御,故障検知などに用いられ,電池を タが推定できるかどうかを評価する (7), (9) ③ 温度一定や SOC 一定などのパラメータが変化しない 安全に使用するために必要な要素である. 条件下でインピーダンス測定などを行い,その値を 電池の SOC とパラメータを逐次的に推定する方法に 真値として評価する (7), (10), (11) ついて,さまざまな研究や開発が行われてきた.たと ④ UKF などで算出される分散の推定値を評価する (6) えば,カルマンフィルタを用いた方法 (4), (5) や拡張カル などの方法でパラメータ推定精度の議論がなされてき マンフィルタや無香料カルマンフィルタ(Unscented た.しかし,時々刻々と変化していくパラメータの推定 Kalman Filter, 以下 UKF)などの非線形カルマンフィ 精度を示すことは一般に難しい問題であった. ルタを用いた方法 (1), (6) ,適応デジタルフィルタを用いた 公益社団法人 自動車技術会の許可を得て自動車技術会論文集Vol.46, No.1より転載 本論文では,筆者らが提案する対数化 UKF による電 * 電子事業本部 パワーエレクトロニクス設計グループ ** 京都大学 *** 慶應義塾大学 67 CALSONIC KANSEI TECHNICAL REVIEW vol.12 2016 池の SOC とパラメータの同時推定法 (6) のパラメータの 推定精度について議論する.その際,パラメータ推定精 度を評価する方法として,リチウムイオンの拡散係数と パラメータ(内部抵抗)の温度依存性を用いる方法を提 Fig. 1 Battery Model 案する.一般にリチウムイオンの拡散係数は,電気化学 値とみなして推定精度を評価することができる.また, 電池の内部抵抗の温度依存性は既知であるので,逐次推 定された内部抵抗がそのような温度依存性にしたがった 時間変化をしているかを評価することで,精度を論じる OCV [V] の実験による測定が行われているので,その測定値を真 4 3.5 3 0 ことができる. 20 40 60 SOC [%] 80 100 Fig. 2 SOC-OCV Characteristics 本論文の構成を以下に示す.まず,筆者らが提案する 対数化 UKF による電池の SOC とパラメータの同時推定 法について述べる.本推定法の特徴は,拡散現象を考慮 した電池等価回路モデルを用いていることとパラメータ の対数を取って推定する対数化 UKF を用いていること にある.つぎに本論文で提案するパラメータ推定精度を Fig. 3 Battery Model with n-th Foster’s Circuit 評価する方法について,対数化 UKF によるパラメータ 推定精度の検証を例にとって議論する.提案法の有用性 開始時刻,SOC(t0) は時刻 t0 秒における SOC である.さ は,EV を用いた延べ 126 時間の走行実験のデータを用 らに SOH は新品時の満充電容量と現在の満充電容量の いて示す. 比で表される量である. 内部インピーダンスは電解質内のイオンの泳動過程と 2.対数化 UKF による電池のパラメータと状態の 電極と電解質の界面での電子の授受を行う電荷移動過 程,界面でのイオンの拡散過程の三つの要素に分けられ 同時推定 る.泳動過程はオーム抵抗であり,電荷移動過程は時定 2.1. 拡散現象を考慮した電池モデル 電池の状態推定のための一般的なモデルを図 1 に 数数ミリ秒~数百ミリ秒,拡散過程は時定数数秒~数千 示 す. こ の モ デ ル で は, 開 回 路 電 圧(Open Circuit 秒のダイナミクスである. の二つの 本論文ではサンプリング周期を 1 秒に設定する関係か 要素を考える.前者は電気化学的平衡状態における電極 ら,電荷移動過程は泳動過程と同じく抵抗で近似できる の電位差であり,後者は電気化学反応の反応速度によっ ものとし,ダイナミクスとしてイオンの拡散過程のみを て決まるインピーダンスである. 考慮する.このとき,内部インピーダンスを Voltage, 以下 OCV)と内部インピーダンス OCV と SOC のあいだには,SOC-OCV 特性と呼ばれ る電極材料によって決まる非線形な一対一の対応関係が あり,これは電池の温度や劣化に依存しないことが知ら れている (7), (12) .SOC-OCV 特性の一例を図 2 に示す.本 論文ではこの特性を OCV( ) = と関数 OCV 0 + √ tanh √ (3) と表現する.ただし,s はラプラス演算子である.右辺 第一項の R0 は泳動過程と電荷移動過程の抵抗であり,右 辺第二項はワールブルグインピーダンスと呼ばれる拡散 (SOC( )) (1) 本モデルでは SOC を次式のように現在の電池の残容 量と満充電容量(Full Charge Capacity)の比として定 義する. 1 FCC0 ⋅ SOH 過程のインピーダンスである.ただし,Rd はワールブル グインピーダンスの低周波極限(ω→ +0)であり,拡散 で表すことにする. SOC( ) = SOC( 0 ) + ( )= t t0 ( )d (2) 抵抗と呼ぶ.また,τd は拡散の速度を意味し,拡散の時 定数を表す.さらに Rd とτd を用いて,拡散容量 Cd を = (4) と定義する.このワールブルグインピーダンスの特徴は 45°の位相遅れをもつことである. ただし,i(t)は時刻 t 秒における充放電時の電流であり, (3) 式のワールブルグインピーダンスはそのままでは 充電する方向を正とする.また,FCC0 は新品時の電池 扱いにくいので,等価回路を用いて近似する方法がいく の満充電容量で単位は C(クーロン)である.t0 は推定 つか提案されている (13).本論文では, 68 HEV/EV 向けリチウムイオン電池の充電率とパラメータの同時推定 ( )= のように ∞ Σ =1 (5) +1 を無限級数の和で近似する方法を採用 する.ただし, = = 2 (6) 8 (2 − 1)2 (7) 2 Table 1 Specifications of EV Used in Experiments Curb weight Seating capacity Electric motor Battery -Total voltage -Number of cells 1520 kg 5 80 kW, 280 Nm 24 kWh lithium-ion battery 360 V 192 cells 以下に対数化 UKF による電池の状態とパラメータの である.(5) 式は無限次元のモデルであるので,実用上 同時推定の適用方法を示す.対数化 UKF では,システ は適切な次数 n で打ち切ることになる. ムの未知パラメータを対数化した上で状態変数に加えた 次数 n としたワールブルグインピーダンスを含む電池 拡大系を構成して推定する.すなわち,拡大系の状態変 の等価回路モデルを図 3 に示す.図の等価回路モデルで, 数zを 時刻 t での状態変数 x を ( ) = [SOC( ) 1( ) … ( )]⊤ (8) として,入力 u(t)= i(t),出力 y(t)= v(t)とする. ただし,v1(t)~ vn(t)はそれぞれ添字に対応したコ ンデンサでの電圧降下,i(t)は回路全体を流れる電流, v(t)は回路全体の電圧降下である.このとき,図 3 の モデルの状態空間表現は, ̇( ) = ( )= ( )+ ( ) ) )+ ( SOC( OCV ⊤ となる.ただし, = diag �0, − 1 1 1 ,…,− 1 1 FCC0 ⋅ SOH 1 = [0 1 … 1]⊤ =� … ( )+ 1 1 0 ( ) � ⊤ � (9) (10) (11) (12) (13) である.また,Cn と Rn を (6),(7) 式のようにおいた. 新品時の満充電容量 FCC0 は既知量であるので,この 電池モデルの未知パラメータは SOH, R0, Rd, Cd である. 本論文では簡単のため SOH については既知量として扱 うことにすると,未知パラメータベクトルθは, =[ となる. 0 ]⊤ (14) ⊤( ⊤( ) )]⊤ (16) ]⊤ ln ]⊤ (17) (18) として推定する.ただし,未知パラメータθについて対 数を取ったθ L を =[ = [ln 0 0 ln と定義する.このとき,拡大系モデルは, ̇( ) = ( )=ℎ � � ( ), ( ) � ( ), ( ) � (19) (20) となる.ただし, � ( ), ( )� ⎡ ⎤ FCC0 ⋅ SOH ⎢ ⎥ 2 2 ⎢ 1 ⎥ − + ⎢ 4 exp � exp � + � �⎥ ⎢ ⎥ ⋮ =⎢ ⎥ (2 − 1)2 2 2 ⎢− ⎥ + exp � + � �⎢ ⎢ 4 exp � ⎢ ⎥ 0 ⎢ ⎥ 0 ⎣ ⎦ 0 ℎ � ( ), ( )� = OCV (SOC) + 1 + ⋯ + + exp � 0 � (21) (22) とおいた.この拡大系モデルをオイラー法やルンゲクッ タ法などを用いて離散化し,UKF を用いて推定する (14). 2.2. 対数化 UKF による SOC とパラメータの同時推定 筆者らが提案する対数化 UKF は,未知パラメータの 対数化を行う方法である.すなわち,ある未知パラメー タ X を推定する代わりにそのべき指数 Z を推定する. たとえば,ネイピア数を底として, = exp ( )=[ 3.パラメータ推定精度についての考察 3.1. EV を用いた走行実験 1 台の EV を用いて,21 回,延べ 126 時間の走行実験 を行った.表 1 に実験に用いた EV の諸元を示す.これ らの実験では温度や SOC,SOH などさまざまな条件下 (15) での電池の充放電が含まれるよう走行した. と表される Z を推定する.この方法にはつぎの三つの効 実験に用いた EV に搭載されるリチウムイオン電池 果が期待できる (6). は,正極はマンガン系材料,負極はグラファイトで構 1. UKF の計算における数値的安定性が向上する. 成されている.また,新品時の満充電容量は 65.6Ah で 2. パラメータ推定値が必ず正になる. あ る. な お, こ こ で 単 位 Ah は 電 荷 量 の 単 位 で あ り, 3. 実電池のパラメータ(内部抵抗)の分布に近くなる. 1Ah=3600C である. 69 200 100 0 -100 -200 0 4.2 Temperature [oC] SOC [%] Voltage [V] Current [A] CALSONIC KANSEI TECHNICAL REVIEW vol.12 2016 100 200 300 400 500 = diag(10−4 , 10−5 , … , 10−5 , 10−6 , 10−6 , 10−8 ) = 0.3 4 4 0|0 = diag(0.1, 10 , … , 10 , 1, 3, 10) 600 4 ̂ 0|0 3.8 3.6 0 100 75 50 25 0 0 40 100 200 300 400 500 600 初期値 100 200 300 400 500 600 0|0 SÔC( 0 ) ⎡ ⎤ ⎡ 0.927 ⎤ 0 ⎢ ⎥ ⎢ 0 ⎥ ⋮ ⎢ ⎥ ⎢ ⋮ ⎥ 0 ⎥= =⎢ 0 ⎢ ln ̂ 0 ( 0 ) ⎥ ⎢⎢−7.18⎥⎥ ⎢ ⎥ ̂ ⎢ln ( 0 )⎥ ⎢−7.25⎥ ⎣ ln ̂ ( 0 )⎦ ⎣ 11.3 ⎦ はシステム同定の結果 (15) から決めた.SÔC (t0) についてのみ,推定開始時刻 t0 にしたがって値を変えた. また,r は電流センサの精度を参考に,Q, 0|0 は各状 態変数のおおまかなオーダをもとに選定した.離散化は, 20 0 Battery Temp. Outside Temp. -20 0 100 200 300 400 Time [min] 500 600 Fig. 4 Time History of Current, Voltage, SOC and Temperature. 4 次のルンゲクッタ法を用いて,サンプリング周期 1 秒 で行った. ワールブルグインピーダンスの近似の次数 n を 1 から 8 まで変えて,それぞれの場合について上記の 181 回の 推定を行った.そのうち,n= 2 ~ 4 の場合の結果を図 5 ~ 7 に示した.これらの図では,181 回の推定それぞ 走行実験によって得られたデータの一例として,図 4 れの SOC 推定値の誤差の二乗平均平方根(Root Mean に SOH = 1 とみなしてよい新車を用いた実験によって Square Error, RMSE)とパラメータ推定値 得られた電流と全セルの平均電圧の波形,SOC の真値, の最終値を図示した.また,181 回の推定結果のうち外 そして電池の平均温度と外気温を示す.急速充電を繰り れ値を除外して計算した平均値も図示した. 返しながら,高速道路や山岳路を 10 時間走行した際の まず,SOC 推定値の RMSE を見ると,どの場合でも 波形である. 初期 SOC にはほとんど依存しないことがわかる.また, 0 , d , τd パラメータ推定値の最終値を見ると,どの次数でも R0 3.2. パラメータ推定値の統計的検証に基づく次数決定 が最もばらつきが小さく,Rd , τd の順にばらつきが大き 対数化 UKF による推定の次数を決定するために図 4 くなっていくことがわかる.特にτd は次数によっては中 の実験データに対して,推定の開始時刻 t0 を 0 分から 央値付近から外れる場合が多い.これらの結果から近似 360 分まで 2 分刻みで変えて推定を行い,パラメータ推 の次数と推定結果のばらつきの間に関係があることがわ 定値の最終値を評価した.この方法により,異なる初期 かるので,ここから最適な近似の次数を決定することが 条件下から始め,同一の条件下で終了する 181 通りの場 できる. 合の推定結果が得られた.電池の温度などが同一の条件 つぎに定量的に理解するために近似の次数 n と 181 回 下で推定を終了しているので,パラメータ推定値の最終 の推定結果の平均値と標準偏差の関係を図 8 に示す.こ 値は理想的には 181 通りで一致するべきである.実際に の図から,まず,SOC の推定精度は n= 3 ~ 6 でほとん はばらつきを持ってしまうが,そのばらつきが十分小さ ど変わらないことが確認できる.また,R0 については, ければ,精度の高いパラメータ推定ができていると結論 どの次数でもばらつきは小さく,よく推定できていると づけられる.ここで,推定開始時刻を変えることにより, いえる.最後に Rd とτd については,n= 3 の場合にばら 推定を行う時間が最長 10 時間から最短 4 時間まで変わ つきが最小となり,最もよく推定できている.以上のこ ることになるが,最短 4 時間の場合でも推定値の収束に とから,最も信頼度の高い推定値を得られるのは,ワー かかる時間に対して十分な長さを確保していると考えら ルブルグインピーダンスの近似次数を n= 3 とした場合で れる. あると結論づけられる.以下では,この次数を用いて推 UKF では設定パラメータとして,システム雑音の共 定精度について論じる. 分散行列 Q,観測雑音の分散 r,拡大系状態変数の推定 値の初期値 0|0 ,初期共分散行列 0|0 を設定する.これ らは調整パラメータの性格が強く,設定には試行錯誤が 必要になる.以下に UKF の設定値を示す. 70 5 -3 d 0.5 R0 [ Ω] SOC RMSE [%] 5 0 0 50 100 Initial SOC [%] x 10 0.5 0 0 50 100 Initial SOC [%] d 1 0.5 1000 τ [s] d R [ Ω] 1.5 x 10 -3 0 0 50 100 Initial SOC [%] -3 R0 [ Ω] 0 1 2 3 4 5 6 7 8 Order, n 500 0 1 2 3 4 5 6 7 8 Order, n Fig. 8 Relationship Between the Order n and Statistics of Each Estimates, Circle Markers Indicate Average, and Triangle Markers Indicate ± 1 Sigma Range. 拡散の時定数の推定値 ̂ が妥当な値であることを確か めるために,物理化学の実験によって測定されているリ チウムイオンの拡散係数と比較する.ここで,拡散係数 D と拡散の時定数τd の間には, Fig. 6 Relationship Between Initial SOC and Each Final Estimates in Case of n = 3, Markers Indicate Each Final Estimates, and Lines Indicate Trimmed Mean of them. 1 1000 検証 0 50 100 0 Initial SOC [%] 10 x 10 0.5 0.5 500 0 50 100 0 Initial SOC [%] 0.5 3.3. リチウムイオンの拡散係数を用いた推定精度の 1000 τ [s] d R [ Ω] x 10 1 -3 0 100 50 0 Initial SOC [%] 0 50 100 0 Initial SOC [%] 1.5 x 10 x 10 0 1 2 3 4 5 6 7 8 Order, n d Rd [ Ω] d R0 [ Ω] SOC RMSE [%] Fig. 5 Relationship Between Initial SOC and Each Final Estimates in Case of n = 2, Markers Indicate Each Final Estimates, and Lines Indicate Trimmed Mean of them. 1 0 1 2 3 4 5 6 7 8 Order, n 1 0 100 50 0 Initial SOC [%] 10 5 1.5 500 0 100 50 0 Initial SOC [%] -3 1 10 -3 1000 τ [s] d R [ Ω] 0.5 0.5 0 100 50 0 Initial SOC [%] 0 100 50 0 Initial SOC [%] -3 x 10 1.5 1 -3 τ [s] 0 5 x 10 SOC RMSE [%] 1 10 R [ Ω] SOC RMSE [%] HEV/EV 向けリチウムイオン電池の充電率とパラメータの同時推定 500 0 0 50 100 Initial SOC [%] Fig. 7 Relationship Between Initial SOC and Each Final Estimates in Case of n = 4, Markers Indicate Each Final Estimates, and Lines Indicate Trimmed Mean of them. = 2 (23) の関係がある (3). ただし, δはネルンストの拡散長であり, 拡散が起きている範囲を示す.一般にリチウムイオン電 池内部のリチウムイオンの拡散は電極間の長さと等しく なると考えられるので,δ =10 ~ 100 μ m 程度を見積 もればよい.よって,ワールブルグインピーダンスの近 似次数が n= 3 の場合の ̂ の平均値 89.7 秒を用いて拡散 係数 D を計算すると,D= 1.12 × 10 -12 ~ 1.12 × 1-10 m2/s となる.一方,リチウムイオンの拡散係数の測定値は文 献 (16), (17), (18) によれば,D= 1 × 10-14 ~ 1 × 10-10 m2/s といっ た範囲の値であるので,両者は良い一致をみせている. このことから,対数化 UKF によって推定された拡散の 時定数は物理化学的にも妥当な値であるといえる. 3.4. 内部抵抗の温度依存性を用いた推定精度の検証 内部抵抗の推定値が妥当な値であることを確かめるた めにその温度依存性が反応速度論と一致するか検証す る.図 4 に示したように走行実験の際の電池の温度は一 定ではないので,温度の変化にともなって,内部抵抗も 変化していると考えられる.ここで,一般に電池の内部 抵抗 X はつぎのアレニウスの式に従った温度依存性を 示すことが知られている (19), (20), (21). ( )= exp �− ℜ � (24) 71 CALSONIC KANSEI TECHNICAL REVIEW vol.12 2016 3.5. 対数化 UKF を用いた EV 用システム -5 提案法を用いて EV 用の電池マネジメントシステムを ln R0 -5.5 構築した.その際に SOC 推定精度を確認した結果を図 -6 10 に示す.SOC 推定値の真値からの誤差の RMSE を計 -6.5 算すると 2.54% となり,従来システム (5) の 3 ~ 8% 程度 と比べて精度が向上した. -7 また,電池マネジメントを行うには,SOC の他,SOH や入出力可能パワー(State Of Power, 以下 SOP)の情 -7.5 報が必要になる.これらは,電池の電圧や電流,温度, -8 3 3.6 3.4 1/T [K-1] 3.2 SOC,パラメータを用いて算出することができる (1), (2), (3). 4 3.8 x 10 -3 このため,SOC やパラメータの推定精度が高い提案法は, Fig. 9 Arrhenius Plot of the internal Resistance Estimated by the Log-Normalized UKF. Dashed Line Indicates an Example of the Arrhenius Type Temperature Dependence. SOC [%] 100 の目的をより高いレベルで実現することができた. 4. お わ り に 本論文では,筆者らが提案した対数化 UKF による電 池の SOC とパラメータの同時推定法のパラメータ推定 50 0 0 SOH や SOP の精度向上にも貢献し,電池マネジメント 精度を評価した.特にその評価方法として,電気化学の Estimated True 100 200 300 400 Time [min] 500 600 Fig. 10 SOC Estimation Result. 実験によるリチウムイオンの拡散係数の測定値を真値と みなす方法と,推定したパラメータ(内部抵抗)の温度 依存性がアレニウスの式に従うかどうかを見る方法の二 つを提案した.これらの方法を用いて,実際に対数化 ただし,Λは頻度因子(温度に無関係な定数),Ea は活 UKF によって EV を用いた走行実験データからパラメー 性化エネルギー,𝔑 は気体定数,T は電池の絶対温度で タ推定ができるか示した.また,提案する対数化 UKF ある.したがって,対数化 UKF で推定した内部抵抗が を用いた電池マネジメントシステムにおいて,高精度な アレニウスの式に従った指数関数的な変化をするかどう SOC 推定ができていることを確認した. かを検証すればよい. 図 9 に 21 回の走行実験における延べ 126 時間のデー 参 考 文 献 タを用いて,対数化 UKF で SOC とパラメータを同時推 (1) G. L. Plett: Extended Kalman filtering for battery の関 management systems of LiPB-based HEV battery 係を示す.また,破線でアレニウスの式に従う温度依存 packs. Part 1. Background, Journal of Power Sources, 定した際の電池温度(測定値)と抵抗の推定値 0 性の一例を示した.ただし,21 回のそれぞれの推定が収 Vol. 134, No. 2, p. 252-261 (2004) 束する途中のパラメータ推定値は温度依存性とは無関係 (2) L. Lu, X. Han, J. Li, J. Hua and M. Ouyang: A のものと考えられるので,推定開始から 30 分間の推定 review on the key issues for lithium-ion battery 値については図から取り除いている. management in electric vehicles, Journal of Power 図 9 を見ると,いくつかの例外を除いて,アレニウ Sources, Vol. 226, p. 272-288 (2013) スの式に従った温度依存性が推定できていることがわ (3) 廣田 幸嗣,足立 修一(編著),出口 欣高,小 かる.いくつかの例外のうち,図中で横に伸びている線 笠原 悟司(著):電気自動車の制御システム 電 については,充電器につないだ充電中の条件下であっ 池・モータ・エコ技術,東京,東京電機大学出版局, た.充電中は一定電流が流れ,入力の PE(persistently 2009,207p. exciting)性が失われているので,推定はできていない (4) 馬場 厚志,足立 修一:シリーズカルマンフィル ものと考えられる.また,図中で縦に伸びている線につ タ法を用いた二次電池の充電率推定,電気学会論文 いては,SOC が 90% 以上や 20% 以下といった条件下で 誌(D),Vol. 132,No. 9,p. 907-914 (2012) あった.これらの領域では内部抵抗が大きくなることが (2) (5) 枝本 吉広,馬場 厚志,寺西 望,板橋 欣之介, 知られており ,その点を考慮すれば妥当な結果である 長村 謙介,丸田 一郎,足立 修一:HEV/EV 向 といえる.以上のことから,対数化 UKF によってパラ け電池の充電率推定,自動車技術会学術講演会前刷 メータを逐次的に推定できていると結論づけられる. 集,No. 45-13,p. 1-4 (2013) 72 HEV/EV 向けリチウムイオン電池の充電率とパラメータの同時推定 (6) 馬場 厚志,足立 修一:対数化 UKF を用いたリチ analysis of lithiated graphite anodes, Journal of ウムイオン電池の状態とパラメータの同時推定,電 The Electrochemical Society, Vol. 150, No. 3, p. 気学会論文誌 (D) , Vol. 133, No. 12, p. 1139-1147 (2013) A374-A384 (2004) (7) 湯本 大次郎,中村 英夫,廣田 眞由美,越智 (19)P. Rong and M. Pedram: An analytical model 徳昌:適応デジタルフィルタ理論を用いた電池内部 for predicting the remaining battery capacity of 状態量の推定手法,自動車技術会論文集,Vol. 35, lithium-ion batteries, IEEE Transactions on Very No. 3,p. 91-96 (2004) Large Scale Integration (VLSI) Systems, Vol. 14, No. (8) H. Xiaosong, S. Fengchun, Z. Yuan, and P. Huei: 5, p. 441-451 (2006) Online estimation of an electric vehicle Lithium- (20)L. Serrao, Z. Chehab, Y. Guezennee and G. Rizzoni: Ion battery using recursive least squares with An aging model of Ni-MH batteries for hybrid forgetting, Proceedings of American Control electric vehicles, 2005 IEEE Conference in Vehicle Conference 2011, p. 935-940 (2011) Power and Propulsion, p. 78-85 (2005) (9) R. Restaino and W. Zamboni: Rao-Blackwellised (21)M. Cugnet, J. Sabatier, S. Laruelle, S. Grugeon, B. Particle Filter for Battery State-Of-Charge and Sahut, A. Oustaloup and J.-M. Tarascon: On lead- Parameters Estimation, 39th Annual Conference of acid-battery resistance and cranking-capability the IEEE Industrial Electronics Society, p. 6783-6788 estimation, IEEE Transactions on Industrial (2013) Electronics, Vo. 57, No. 3, p. 909-917 (2010) (10)J. Kim and B. H. Cho: Pattern Recognition for Temperature- Dependent State-of-Charge/Capacity Estimation of a Li-ion Cell, IEEE Transactions on Energy Conversion, Vol. 28, No. 1, p. 1-11 (2013) (11)D. Andre, C. Appel, T. Soczka-Guth, D. U. Sauer, Advanced mathematical methods of SOC and SOH estimation for lithium-ion batteries, Journal of Power Sources, Vol. 224, p. 20-27 (2013) (12)Y. Hu and S. Yurkovich: Battery cell state-of-charge estimation using linear parameter varying system techniques, Journal of Power Sources, Vol. 198, p. 338-350 (2012) (13)E. Kuhn, C. Forgez, P. Lagonotte and G. Friedrich: Modelling Ni-mH battery using Cauer and Foster structures, Journal of Power Sources, Vol. 158, No. 2, p. 1490-1497 (2006) (14)足立 修一,丸田 一郎:カルマンフィルタの基礎, 東京,東京電機大学出版局,2012,228p. (15)川口 貴弘,丸田 一郎,馬場 厚志,足立 修一: 拡散現象を考慮した電気自動車用二次電池の連続 時間システム同定,計測自動制御学会論文集,Vol. 49,No. 7,p. 670-677 (2013) (16)金村 聖志:高性能リチウムイオン電池開発最前線 : 5V 級正極材料開発の現状と高エネルギー密度化へ の挑戦,東京,エヌ・ティー・エス,2013,342p. (17)P. Yu, B. N. Popov, J. A. Ritter and R. E. White: Determination of the lithium ion diffusion coefficient in graphite, Journal of Electrochemical Society, Vol. 146, No. 1, p. 8-14 (1999) (18)M. W. Verbrugge and B. J. Kochb: Electrochemical 73
© Copyright 2026 Paperzz