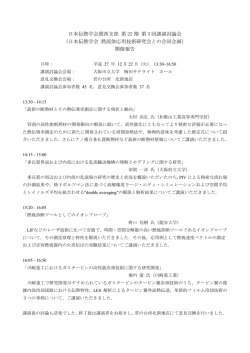
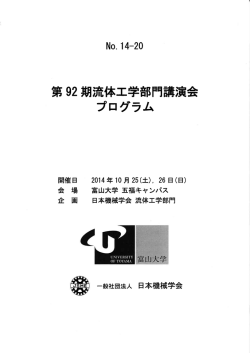
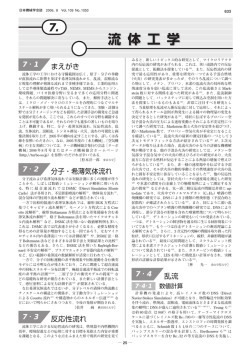
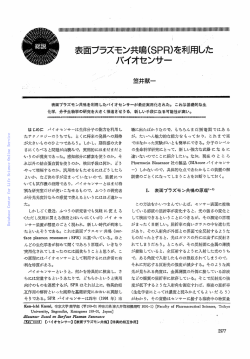
ながれ 20(2001) 83 83 91. 〔特集〕小さなスケールの熱・流れ現象 マイクロ流れの速度場計測 Flow Field Measurement of Micro Flows ∗ 横国大・工 西 野 耕 一† Koichi NISHINO 1 えば,高分子溶液における壁面近傍の高分子吸着 はじめに 層の影響 4),界面動電現象をもたらす壁面上の電 「マイクロ流れ」とは,その代表寸法が表面張 気二重層の影響 5))がマイクロ流れでは顕在化す 力の影響が現れる数ミリ以下の流れを指し,ミリ る,などを理由とする.そのため,マイクロ流れ オーダからサブミクロンオーダまでの寸法が主 の速度場を直接測定することの重要性が再認識さ たる対象である 1) .このような小さな流れは,マ れつつあり,調査研究が進められている 6). イクロマシン周囲や内部の流れ,マイクロデバイ 本稿では,マイクロ流れの速度場計測について ス(例えば,マイクロチャネル・マイクロヒート 最近の研究・開発動向ならびに関連技術について パイプ・マイクロリアクタ・マイクロ化学分析シ 述べる. ステム・インクジェットノズルなど)の内部の流 れ,多孔質体・積層体内部の流れ,微小界面近傍 の流れ(例えば,液膜・液滴・気泡・結晶の周囲 2 計測要求と種類 マイクロ流れの速度場計測への要求をまとめる あるいは内部の流れ) ,生物や生命工学(例えば, と以下のようになる. 微生物・昆虫・毛細血管・DNA 解析のための毛 管電気泳動)における流れ,などに見られる.特 1)空間分解能が高いこと:一般に測定対象の代 表寸法の 1/100∼1/10 が分解できる空間分解能が に,近年の半導体製造技術をベースにした微細加 必要である.具体的には,センシング体積の寸法 工技術の長足の進歩は,µm オーダの流体機械や を数 10 nm∼数 10 µm に抑えなければならない. 流体センサの製作を可能にし,それらを用いた流 市販品では,熱線・熱膜流速計(HWA/HFA)の 体制御への検討が進んでいる 2, 3). 極小プローブの長さが数 100 µm,レーザドップ このようなマイクロ流れは,低レイノルズ数の ラ流速計(LDV)の短焦点距離レンズ使用の場合 層流条件であっても,流れ場を解析的・数値的に で測定体積が直径数 10 µm× 長さ数 100 µm であ 作動 求めることが困難なことが多い.それは,1) り,どちらも空間分解能は充分でない. 流体が高分子や添加剤を含んだ非ニュートン流 2)非挿入・非侵襲であること:センサ挿入によっ 体であったり,粒子・結晶・気泡・液滴・生物細 て速度場が乱されることのないよう,非挿入型 微細加 胞などを含む混相流であることが多く,2) であることが求められる.また,高出力のレーザ 工技術の種類によっては流路に加工屑や凝固物 ビームを絞って照射する場合,それによる流体加 が残り,平滑流路とは様相を全く異にすることが 熱あるいは壁面加熱の影響を考慮する必要があ 物理化学的あるいは電気化学的効果(例 あり,3) る. 3)簡単な測定原理に基づく直接測定であること: ∗ 〒240-8501 横浜市保土ヶ谷区常盤台 79-5 速度以外の物理量を測定し,それから間接的に速 † E-mail: [email protected] 度を求める方法では,その測定原理が必ずしもマ 84 マイクロ流れの速度場計測 イクロ流れに適用できるとはかぎらない.従っ メラを用いると,画素分解能は金属/生物顕微鏡 て,できるだけ簡単な測定原理に基づく直接測定 で 0.1 µm,実体顕微鏡で 0.3 µm となり,上述の が望ましい. 空間分解能の要求範囲に収まる. 4)非ニュートン流体や混相流に適用できること: 像平面上でのトレーサ粒子像の大きさ de は, 上述したように,マイクロ流れでは非ニュートン トレーサ粒子の投影サイズと撮影光学系の回折限 流体や混相流であることが多く,そのような流れ 界とによって定まり,次式で与えられる 7). 場への適用性が望まれる. 以上の要求を全て満たす測定手法は現時点では 見当たらない.これまでに提案・開発されている 手法は次のように分類される. 1)マイクロ PIV(microPIV) :標準的な流体計測 手法として普及しつつある PIV(particle image velocimetry)をマイクロ流れの速度場計測に適用 したもの. de = M 2 d2p + da2 (1) ここで,M は撮影光学系の横倍率,d p は粒子径, da は回折によるエアリディスク直径である.レ ンズ収差のない理想的な撮影光学系では da は次 式で与えられる. da = 2.44λ(1 + M)F (2) 2)分子マーカを利用するもの:蛍光染料,燐光 染料,フォトクロミック(光互変性)染料などの ここで,λ は照明光(= 散乱光)の波長,F は撮影光 分子マーカを利用して,可視化と画像処理によっ 学系の F 値である.平行レーザビームをレンズで て速度場測定を行うもの. 絞る場合は M = 0 としてよいので,da = 2.44 λF 3)その他の方法:NMR(nuclear magnetic resonance)やマイクロセンサを利用するもの. となる.これは,LDV における最小スポット径 マイクロ流れの測定に多く使われている方法は 短焦点レンズを用いた場合でも F = 20 ∼30 と と 2) である.本稿では,1) と 2) の方法に 上の 1) なるため,da = 25∼38 µm である(ここで,λ = については短く紹介 ついて比較的詳しく述べ,3) 514.5 nm:Ar イオンレーザの緑色ビームを仮定). するに留める. 光学的には,入射ビーム径を広げることによって 3 測定手法の実際と応用例 を与える式である 8).LDV では,F 値の小さな F 値を下げ,最小スポット径を縮小させることが 可能であるが,それは同時にフリンジ本数の減少 3.1 マイクロ PIV PIV とは,流れ場に投入した微小トレーサ粒子 を招くため実用的でない. の動きを解析することによって速度分布を測定す イズ 6.7 µm の CCD 素子(素子幅 8.7 mm,セル る手法である.標準的方法では,ダブルパルスの 数 1,300)で撮影する場合について,式(1)を用 シート光で流れ場を照明し,シート光面内の速度 いてトレーサの粒子径・粒子像径・分解能の関 実体顕微鏡を用いて,視野幅 300 µm をセルサ 2 成分を測定する.トレーサ粒子の動きが局所の 係を求めた結果を表 1 に示す.ここで,F = 1.8 流体速度と同一であると仮定できれば,撮影され (あるいは,開口数 NA = n/2F = 0.278.ただ たトレーサ粒子の動きから流体速度とその二次元 し,媒質の屈折率 n = 1),λ = 532 nm(Nd: 分布を知ることができる. YAG レーザの第 2 高調波)を仮定し,横倍率は M = 8.7 mm/300 µm = 29 である.この例から わかるように,粒子径 1 µm 以下では,回折限界 PIV の視野範囲を顕微鏡を用いて微小化したも のがマイクロ PIV である.視野幅は,金属/生物 顕微鏡では 100 µm 程度,実体顕微鏡では 300 µm 程度にまで縮小できる.PIV システムで標準的に 用いられる 1, 000 × 1, 000 画素オーダの CCD カ に起因するエアリディスク直径が粒子像径を実質 的に決めており,粒子像径は実際の粒子の大きさ には依存しない. 85 西野耕一 表1 トレーサの粒子径・粒子像径・分解能の関係 粒子径:d p[µm] (粒径パラメータ:α) Md p[µm] da[µm] 粒子像径:de[µm] 粒子像径/セルサイズ 分解能:de /M[µm] 表2 0.1 0.2 0.5 1.0 2.0 5.0 (0.6) (1.2) (3.0) (5.9) (11.8) (29.5) 2.9 5.8 14.5 29.0 58.0 145 70.1 ← ← ← ← ← 70.2 70.3 71.6 75.9 91.0 161.1 10.5 10.5 10.7 11.3 13.6 24.0 2.4 2.4 2.5 2.6 3.1 5.6 ブラウン運動による水中での粒子の拡散速度 d p[µm] 0.1 0.2 0.5 1.0 2.0 5.0 ∆t = 16.7 ms vD[µm/s]for ∆t = 16.7 ms vD[µm/s]for ∆t = 10 µs 0.38 23 920 0.27 16 650 0.17 10 410 0.12 7.2 290 0.083 5.1 210 0.053 3.2 130 x2[µm]for 粒子からの散乱光強度は,粒子径が照明光の波 時間間隔である 16.7 ms を仮定し,20˚C の水中で 長より小さい範囲では d6p に比例し,それより粒 の平均移動距離とそれを時間間隔で除した拡散速 子径が大きくなると d2p に比例する 8, 9) .表 1 に 度 vD を評価すると表 2 のようになる.例えば,粒 は,粒子径と照明光の波長との比である粒径パラ 子径 1.0 µm の粒子の拡散速度は 7.2 µm/s と小さ メータ α = πd p /λ を含めた.粒子と作動流体の い.しかし,式 (3) よりわかるように,vD ∝ 1/∆t1/2 屈折率比にも依存するが,散乱光強度は α < 1 で であり,測定される拡散速度は時間間隔の減少と は d6p に比例し,α > 10 では d2p に比例すると考 えてよい.このことは,表 1 の粒子径 2.0 µm 以 下(α ≤ 11.8)の粒子では粒子径の減少とともに ともに増加することに注意する必要がある.表 2 には,∆t = 10 µs に対する拡散速度を含めた. 式(2)は,シート光厚みの評価にも適用でき, 散乱光強度が急速に低下することを意味してお その最小厚みは LDV における最小スポット径と り,明るく鮮明な粒子像を撮影する上での障壁と 同程度(数 10 µm)となる.この厚みは,通常の なる.また,そのような小粒径範囲では粒子径の 速度場計測では充分に薄いと取り扱って差し支 わずかな分散が散乱光強度の大きなバラツキをも えないが,マイクロ流れ(特に,代表寸法が数 たらすため,粒子径分散の小さなトレーサ粒子を 100 µm 以下)では「充分に薄い」とすることは 選定する必要がある. できない.従って,何等かの方法で視野奥行き方 粒子が小さくなると,ブラウン運動の影響が表 向の位置決めを行う必要が生じる.位置決めの方 面化するとの問題にも注意を払う必要がある.ブ 被写界深度を限定すること,2) 三次 法として,1) ラウン運動による粒子の平均移動距離 元測定を行うことが提案されている. 式で与えられる x2 = x2 は次 10) Meinhart ら 11)は,顕微鏡を用いたマイクロ PIV における粒子の被写界深度 ∆z を与える次式 . 2kT ∆t 3πµd p (3) ここで,k はボルツマン定数,T は流体温度,∆t は 拡散時間,µ は流体の粘性係数である.∆t は PIV を提案した. ∆z = 3 nλ 2.16 d p nλ ne +d p (4) + + tan θ NA2 NA · M NA2 ではダブルパルス照明の時間間隔に対応する.今, ここで,e は撮像素子の分解能(=CCD 素子では 時間間隔として通常の CCD カメラのフィールド セル間隔),θ は粒子が対物レンズに張る円錐の 86 マイクロ流れの速度場計測 表 3 トレーサ粒子の被写界深度 0.1 0.2 0.5 粒子径:d p[µm] Case 1: n = 1.0, λ = 532 nm NA = 0.275 Case 2: n = 1.5, λ = 532 nm NA = 1.4 図1 3nλ/NA2[µm] 2.16nd p /NA[µm] ∆z[µm] 3nλ/NA2[µm] 2.16nd p /NA[µm] ∆z[µm] ← 1.6 22.9 ← 0.46 1.8 21.1 0.79 22.0 1.2 0.23 1.5 ← 3.9 25.5 ← 1.2 2.9 1.0 ← 7.9 30.0 ← 2.3 4.5 2.0 ← 15.7 38.8 ← 4.6 7.8 5.0 ← 39.3 65.4 ← 11.6 17.8 被写界深度限定型マイクロ PIV システム 14) 頂角の 1/2 である.右辺第 1 式第 1 項は回折に よる被写界深度 12)を表し,第 2 項は幾何光学的 図2 「被写界深度限定型マイクロ PIV」による マイクロチャネル層流の測定結果 14) な被写界深度を表す.一般に,幾何光学的な被 写界深度は 2(1 + M)neF/M 2 で与えられるが 13), この表の結果より,1) 実体顕微鏡を用いた Case 1 F = n/2NA と M 1 の関係を用いることによ の右辺第 2 式は,理 り上式の表現となる.式 (4) では回折による被写界深度の影響が大きいこと, 2)一方,油浸式対物レンズを用いた Case 2 では 想物点からの位置ずれによって粒子像の輝度が 回折の影響は相対的に小さく,微小粒子(例えば, 1/10 に低下するまでの範囲を被写界深度と定義 した場合のもので,第 3 項は粒子径そのものが被 d p ≤ 0.2 µm)を使用すれば被写界深度を充分に 浅く(例えば,∆z ≤ 1.8 µm)できること,など 写界深度に含まれることを表す. が読み取れる. の右辺第 2 式を用いて,被写界深度を評価 式 (4) そのような, 「被写界深度限定型マイクロ PIV シ した結果を表 3 に示す.Case 1 は表 1 と同じ撮影 ステム」を図 1 に,それによるマイクロチャネル層 系に対するもので,M = 29,n = 1.0,λ = 532 nm, 流の測定結果 14)を図 2 に示す.落射型蛍光顕微 NA = 0.275,e = 6.7 µm に対する結果である. 一方,Case 2 は油浸式対物レンズを使用した金属 鏡(epi-fluorescent microscope)を用い,M = 60, /生物顕微鏡による撮影系に対するもので,視野 幅 100 µm,M = 8.7 mm/100 µm = 87,n = 1.5, NA = 1.4 に対する結果である(その他のパラメー タは Case 1 と同じ) .Case 2 は光学顕微鏡で達成 できる最大倍率,最大開口数に近い条件である. なお,NA n tan θ の近似関係式を用いた. NA = 1.4 の油浸式対物レンズ(ただし,水に対す る実効開口数は 1.23)で撮影を行う.照明は波長 532 nm,出力 1 mJ の Nd:YAG パルスレーザで行 い,1, 300 × 1, 030 × 12bit の冷却型 CCD カメラ で撮影する.トレーサ粒子は比重 1.055,粒子径 100∼300 nm のポリスチレン蛍光粒子で,最適励 起波長 540 nm,ピーク蛍光波長 570 nm である. 87 西野耕一 図 4 暗視野法による強磁性微粒子のブラウン運 動の可視化と PTV 測定 16) 図3 マイクロ PIV によるインクジェットプリンタ のヘッド内部の速度場測定結果 15) 流れ場は 30 µm × 300 µm × 25 mm のガラス製矩 200 nm 程度の水ベース強磁性微粒子のブラウン 運動を可視化し,粒子個々の動きを追跡する PTV (particle tracking velocimetry)によって定量化し た結果である 16).撮影は生物顕微鏡と油浸式暗 形チャネルで,作動流体は水である. 蛍光粒子が照明光に対して透明であれば,蛍光 強度は蛍光染料の分子数に比例するので,d3p められている.図 4 は,暗視野法を用いて粒径 視野コンデンサレンズを用いて行われ,1/30 s 間 に 隔で撮影されたデジタル画像より粒子挙動の解析 比例することになる.この粒子径依存性は,上述 が行われている.図中の幾つかの白塊がそれぞれ した散乱光強度の粒子径依存性(∝ 強磁性微粒子で,そこから放射状にランダムに伸 d6p )より緩 やかで,粒子径が小さい範囲では有利である.ま びている矢印が測定された速度ベクトルを表す. た,蛍光のみを通過させる光学フィルタを用いる 視野奥行き方向の位置決めを行う別原理の方法 ことにより,照明光からの反射や迷光を除去でき は三次元測定である.2 台以上の CCD カメラを るとの利点もある.図 2 の結果は,チャネル側壁 用いたステレオ撮影(あるいは多眼撮影)によっ 近傍の測定領域(100 µm × 100 µm)の一部を拡 て対象物の視野奥行き方向位置を知ることがで 大したもので,FFT ベース相互相関 PIV によっ き,トレーサ粒子個々の動きを追跡する PTV と て 13.6 µm × 0.9 µm∼13.6 µm × 4.4 µm の空間分 組み合わされる 17).視野奥行き方向位置の測定 解能で速度分布が得られている.測定結果は層流 精度は,2 台の CCD カメラを用いた場合,それら 解と良好に一致することが報告されている. の光軸間角度を 2θ とすると,|σz /σ x | = 1/ tan θ マイクロ PIV の実際的な適用例として,イン で与えられる 18).ここで,σ x は画素分解能で定 クジェットプリンタのヘッド内部の流速測定結 まる面内方向位置の測定精度,σz は視野奥行き 果 15)を図 3 に示す.幅約 50 µm のノズルに流入 方向位置の測定精度である.例えば,光軸間角度 する非定常流を測定したもので,インクが噴出す が 60 deg のとき |σz /σ x | = 1.7 であり,この比は る直前の流速分布である.トレーサ粒子として直 光軸間角度の減少とともに急増する. 径 700 nm のポリスチレン蛍光粒子を使用し,視 図 5 は,2 台のテレビカメラを用いた「ステレオ 野サイズは 200 µm × 175 µm,被写界深度は 8∼ 撮影型マイクロ PIV システム」である 19).光軸 10 µm である.表 3 の Case 2 と比較して被写界 間角度は 60 deg で,視野幅は約 3 mm である.通 深度が大きいのは,撮影箇所までの作動距離を大 常の CCD カメラ(768×494×8bit)を使用し,画素 きくする必要から開口数を 0.6 としているためで 分解能は 3.9 µm である.作動流体は水,チャネル ある. 幅は 2 mm,チャネル中心流速は 4.7 m/s,それら 被写界深度を限定する他の顕微鏡撮影方法と に基づくレイノルズ数は Rec = 9, 760 である.ト して,暗視野法や共焦点法などがあり,検討が進 レーサ粒子の三次元位置測定の不確かさ(95 %包 88 マイクロ流れの速度場計測 3.2 分子マーカ利用の方法 マイクロ流れは,界面動電現象(electrokinetic phenomenon)が 関 与 す る 電 気 浸 透(electroosmosis)や電気泳動(electrophoresis)において も見られる.特に,ゲノム科学では,DNA 解析 に使われる毛管電気泳動流の特性の実験的把握が 望まれている 22).そのような系では,流れ場に 強い電界を印可するため,帯電したトレーサ粒子 に作用する電気泳動力によって,トレーサ粒子と ステレオ撮影型マイクロ PIV システム 19) 図5 周囲流体との間に大きなスリップ速度が発生し 得る 5).その他にも,局所速度勾配が粒子に与え る流体力,温度勾配による熱泳動力,上述したブ ラウン運動など,トレーサ粒子挙動の解釈を複雑 化する複数の要因が存在する.そのため,蛍光染 料,燐光染料,フォトクロミック(光互変性)染 料などの分子マーカを利用した速度場測定手法が 検討されている. 分子マーカで速度分布を可視化・測定するため には,細いレーザビームあるいは薄いレーザシー トで分子マーカを含む流体を照射し,それによっ て発色した流体塊の移動を追跡する.この場合の 空間分解能は,レーザビームあるいはシートの最 小(最薄)部の厚みと,前述した被写界深度とに マイクロチャネル乱流の乱れ度の 3 成分 19) 図6 よって規定される.毛管電気泳動流への適用で は,曲率を有する毛管流路(直径 100 µm 程度) 括度)は,流れ方向 2.1 µm,壁垂直方向 3.7 µm, への光学的アクセスを確保する必要上,理想的な スパン方向 1.9 µm,それぞれの方向の速度測定 油浸式顕微鏡で実現されるような大きな開口数 の不確かさは 220 mm/s,350 mm/s,200 mm/s と による顕微鏡撮影は難しく,従って被写界深度は 評価されている.これらの速度測定の不確かさ 20 µm 程度となることが報告されている 5, 23). の 1/2 は(不確かさが正規分布に従う場合の標準 トレーサ粒子と対比して,分子マーカの使用で 偏差に相当する) ,摩擦速度(= 260mm/s)のそ 問題となるのが分子拡散によるマーカの「ぼやけ」 れぞれ 42 %,67 %,38 %となる.壁垂直方向の である.今,拡散係数 = 10−5 cm2 /s,拡散距離 = 不確かさが大きいのは,その方向が視野奥行き方 向に一致しているからである.図 6 は測定され 50 µm(= 毛管流路半径)を仮定すると,拡散時 間は 2.5 s となる.従って,毛管流路半径に比べ た速度変動 3 成分の rms 値の分布である.文献 てマーカのぼやけを小さく抑えるためには,拡散 データ 20, 21) と比較して,1) 流れ方向成分 (u ) と 時間を 250 ms 程度(= 10 %)以下とすることが はレイノルズ数の違いを考慮 スパン方向成分 (w ) 望まれる.一方,1 mm/s 以下の極低速流である すると妥当に一致すること,2) 一方,壁垂直方向 毛管流を測定するためには,観察時間をできるだ は上述の不確かさの影響で一致が劣るこ 成分 (v ) け長く設定して,マーカの移動距離を大きくする と,が示されている. ことが望まれる. 89 西野耕一 3.3 その他の方法 1)NMR を 用 い る 方 法:NMR あ る い は MRI (magnetic resonance imaging)は水素原子核ス ピンをマーカとする方法で,温度場・速度場の 測定に向けた開発が進められている 25).可視光 に対して不透明な物体の内部を測定できる利点 を有する.理想的条件では,10 µm 程度の空間分 解能で,流速を数 µm/s の精度で測定できるとさ れる 26).そのような NMR を電気浸透流に適用 した報告が既になされており 26, 27),内径 800 µm の塩化ビニル製円管の水流を測定し放物型速度分 図7 かご化蛍光染料を用いた毛管内流の速度分布の 布が精度良く把えられている 27). 可視化(分子マーキング後の 99 ms の画像) 2)X 線を用いる方法:X 線に対して異なる吸収 (上)静圧駆動流の速度分布, (下)電気浸透流 の速度分布 23) 約 1 µm)を作動流体として,内径 640 µm の円管 そのような観察時間に対する要求を満たすも のとして, 「かご化蛍光染料(caged fluorescent dye)」を利用する方法が提案されている 特性を有する油滴−水エマルジョン(油滴径は 23, 24) . 流れを測定した報告がなされている 28).通常の PIV と同様のダブルパルス照明を X 線で照射し, 透過光画像を解析する方法である.NMR と同様 この蛍光染料は,通常は蛍光を阻害する化合物に に不透明物体の内部を測定できるとの利点を有す 取り囲まれているため非蛍光性であるが,紫外線 る. 照射などによって化合物が光分解されると蛍光性 3)マイクロセンサを用いた方法:半導体製造技 を取り戻し(換言すると,分子マーキングされ) , 術を利用して製作したマイクロ熱線流速センサ 適当な励起光の照射によって強い蛍光を発する が報告されている 29).ポリシリコン製のワイヤ ようになる.この特性を利用することによって, は,全長が 10∼160 µm,矩形断面が 1 × 0.5 µm 長い毛管流路の途中の測定個所で流体に分子マー である.センサそのものは µm サイズであるが, キングを施し,流体とともに移動するマーカを サポートやハーネスの微細化が難しいとの課題が 蛍光として観察することが可能になる.図 7 は, ある. この方法を用いて,内径 100 µm の融解石英製毛 管内の速度場を可視化した結果 23)である.図中 4 まとめ の「99」は,撮影がマーキング後の 99 ms に行わ マイクロ流れの速度場計測について最近の研 れたことを意味する.図 7(上)の静圧駆動され 究・開発動向ならびに関連技術についてまとめ る場合,放物型速度分布の Hagen-Poiseuille 流が た.はじめに述べたように,マイクロ流れでは, 形成されていることがわかる.実際,この画像か これまで通常サイズの流れで無視されていた要 ら速度分布を求めたところ放物型分布とよく一 因が顕在化する可能性がある.そのため,たとえ 致することが示されている.一方,図 7(下)は 連続体として取り扱える条件であっても,通常サ 200 V/cm の電界印可によって生じた電気浸透流 イズの流れで得られた知見をマイクロ領域にそ を可視化したもので,管路断面にわたって一様な のまま外挿できない場合がある.その例として, 速度分布が形成されていることがわかる. マイクロ流れにおける圧力損失が N-S 方程式に よる解析結果と有意に異なるとの報告がなされて いる 30, 31).本稿で説明した速度場計測の各手法 90 マイクロ流れの速度場計測 は,そのようなマイクロ流れの特性をつきとめる 上で重要な役割を演じるものと考えられる. ブック(朝倉書店, 1994)98-99. 13)三宅和夫 : 幾何光学(共立出版, 1979)74-76. 14) C. D. Meinhart, S. T. Wereley & J. G. Santiago : 引 用 文 PIV measurements of a microchannel flow, Exper- 献 1)芹澤昭示, 他 6 名 : 特集「マイクロチャンネル内の 流動と熱伝達」, 日本機械学会誌 102-964(1999) 183-189. iments in Fluids 27(1999)414-419. 15) C. D. Meinhart & H. Zhang : The flow structure inside a microfabricated inkjet printhead, J. Mi- 2) C.-M. Ho & Y.-C. Tai : Review: MEMS and its applications for flow control, Trans. ASME, J. Fluids Eng. 118(1996)437-447. 3) C.-M. Ho & Y.-C. Tai : Micro-electro-mechanicalsystems(MEMS)and fluid flows, Annual Review of Fluid Mechanics 30(1998)579-612. 4) H. Muller-Mohnssen, H. P. Lobl & W. Schauerte : Direct determination of apparent slip for a ducted flow of polyacrylamide solutions, J. Rheology 31 (1987)323-336. croelectromechanical Systems 9-1(2000)67-75. 16)木倉宏成・橘俊英・松崎充男・有冨正憲・小林勇 二・中谷功 : 磁性流体中の強磁性微粒子の熱挙 動, 磁性流体連合講演会講演論文集, 筑波(2000) 49-50. 17) K. Nishino, N. Kasagi & M. Hirata : Threedimensional particle tracking velocimetry based on automated digital image processing, Trans. ASME, J. Fluids Eng. 111(1989)384-391. 18)可視化情報学会 PIV ハンドブック編集委員会 編 : 5) J. A. Taylor & E. S. Yeung : Imaging of hydro- PIV ハンドブック(森北出版, 2001)発行予定. dynamic and electrokinetic flow profiles in capil- 19)鳥居薫・西野耕一 : マイクロ流れの 3 次元計測技 laries, Analytical Chemistry 65-20(1993)2928- 術の開発, マイクロマシン技術に関する研究助成 2932. 第 4 回研究成果報告書,(財)マイクロマシンセン 6)(財)マイクロマシンセンター : マイクロチャンネ ター(1998)75-82. ルの応用技術に関する調査研究(調査研究部会委 20) J. Kim, P. Moin & R. Moser : Turbulence statistics , 平成 12 年度「マイクロマシン 員長 : 井上剛良) in fully developed channel flow at low Reynolds 技術への他分野萌芽技術の適用に関する研究」報 number, J. Fluid Mech. 177(1987)133-166. 告書 本編(2001)発行予定. 21)西野耕一・笠木伸英 : 三次元画像処理流速計によ 7) R. J. Adrian : Particle-imaging techniques for experimental fluid mechanics, Annual Review of Fluid Mechanics 23(1991)261-304. 8)日本機械学会, 技術資料「流体計測法」,(1985) 142-158. 機械学会論文集 56-525(1990)1338-1347. 22)例えば, J. A. Taylor & E. S. Yeung : Axial- beam laser- excited fluorescence detection in capillary electrophoresis, Analytical Chemistry 64-15 9)粉体工学会編 : 粒子径計測技術(日刊工業新聞社, 1994)123-143. (1992)1741-1744. 23) P. H. Paul, M. G. Garguilo & D. J. Rakestraw : 10)流れの可視化学会編 : 新版「流れの可視化ハンド ブック」(朝倉書店, 1986)158-164. 11) C. D. Meinhart, S. T. Wereley & M. H. B. Gray : Volume illumination for two-dimensional particle image velocimetry, る二次元チャネル乱流の乱流統計量の測定, 日本 Measurement Science and Technology 11(2000)809-814. 12)田幸敏治・辻内順平・南茂夫 編 : 光測定ハンド Imaging of pressure- and electrokinetically driven flows through open capillaries, Analytical Chemistry 70-13(1998)2459-2467. 24) W. R. Lempert, K. Magee, P. Ronney, K. R. Gee & R. P. Haugland : Flow tagging ve- locimetry in incompressible flow using photoactivated nonintrusive tracking of molecular mo- 91 西野耕一 tion(PHANTOMM), Experiments in Fluids 18 (1995)249-257. 25)小川邦康・當房誠・入口紀男・平井秀一郎・岡崎 健 : 磁気共鳴イメージングによる温度・流れ場の 同時計測法の開発, 日本機械学会論文集 65-636 (1999)2791-2798. 26) B. Manz, P. Stilbs, B. Jonsson, O. Soderman & P. T. Callaghan : NMR imaging of the time evolution of electroosmotic flow in a capillary, J. Physical Chemistry 99-29(1995)11297-11301. 27) D. Wu, A. Chen & C. S. Johnson : Flow imaging Wildes & J. Dunsmuit : An investigation of microstructure and microdynamics of fluid flows in MEMS, Proc. ASME Aerospace Division AD-52 (1996)789-795. 29) F. Jiang, Y.-C. Tai, C.-M. Ho & W. J. Li : A micromachined polysilicon hot-wire anemometry, Proc. Solid-State Sensor and Actuator Workshop, Hilton Head, South Carolina(1994)264-267. 30) J. Pfahler, J. Harley & H. Bau : Liquid transport in micron and submicron channels, Sensors and Actuators A21-A23(1990)431-434. by means of 1D pulsed-field-gradient NMR with 31) T. Hasegawa, M. Suganuma & H. Watanabe : application to electroosmotic flow, J. Magnetic Anomaly of excess pressure drops of the flow Resonance, Series A 115(1995)123-126. through very small orifices, Physics of Fluids 9-1 28) A.-M. Lanzillotto, T.-S. Leu, M. Amabile, R. (1997)1-3.
© Copyright 2026 Paperzz