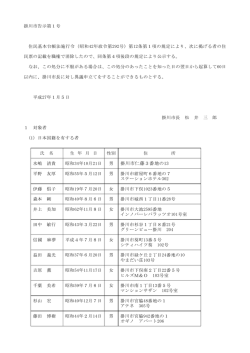
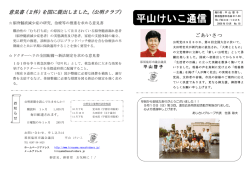
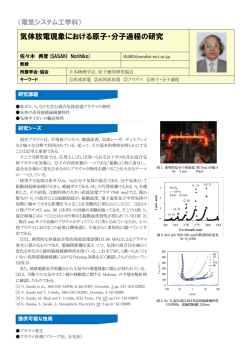
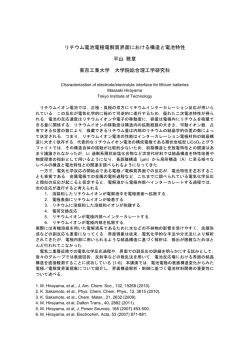
研究課題: 超精密位置決め用空気圧サーボ軸受アクチュエータの基礎特性の把握 報告者:同志社大学 理工学部 准教授 平山朋子 報告日:2008(平成 20 年)6 月 30 日 1. 本研究の意義・特色 近年,半導体製造装置などの一部の特殊な機械において位置決め要素の更なる高精度化 が望まれており,その要求精度は数 nm にも達している.現在,超精密位置決め要素として は圧電素子型アクチュエータの使用が最も一般的であるが,小型で高剛性という特長を持 つ反面,脆さ,劣化,ヒステリシスの発生,熱ドリフトなど,多くの問題を抱えているの も事実である.一方,サーボ弁を用いて空気圧をアクティブに制御する「空気圧サーボア クチュエータ」が提案,開発され,新しい位置決め要素として注目を集めているものの, これらは多ループの高速デジタル制御系を組む必要があり,構成機器に高いダイナミック レンジを要求するという課題がある. そこで本研究では,生来より剛性を有する空圧要素として「静圧軸受」に着目し,静圧 軸受と空気圧サーボ技術を組み合わせた「超精密位置決め用空気圧サーボ軸受アクチュエ ータ」の実現を目指すこととした.圧電素子に比べ,静圧軸受は,ドリフトやヒステリシ スを生むような不確定な要因が少なく,また,適当な剛性を有していることから,弁,軸 受部等,個別の特性を精度良く把握し,各々の性能を高めるよう検討を重ねれば,簡便な 制御で高い位置決め性能を発揮し得ると考える.本申請課題では,そのアクチュエータの 基礎特性を詳細に把握することを目的とした. 今まで,多くの超精密位置決めアクチュエータが提案されているが,サブナノメートル オーダの分解能で実用化に至っている位置決め機構は,未だごく僅かである.本申請課題 で提案する空気圧サーボ軸受アクチュエータは従来にない構造であり,静圧軸受の高剛性 を活かした新しいアクチュエータである.具体的な産業応用としては,半導体製造装置, 超精密除振台等が挙げられ,近年の空気圧駆動そのものへの期待も相俟って,時代に即し た独創的なテーマであると考える. 2. 実施した研究の具体的内容,結果 2.1 アクチュエータの構造と動作原理 本研究で提案する空気圧サーボ軸受アクチュエータの基本構成を図 1 に示す.右端に取 り付けられた空気圧サーボ弁は圧力制御弁であり,静圧スラスト軸受への供給圧力 p c (以 後,制御圧力と呼ぶ)を変化させることができる.軸受すきま内で発生する圧力分布を積 分した量が,スプールの軸方向駆動力 f s である. f s は pc と軸受すきま h の関数であり,釣 合力 f b ≡ ab ⋅ pb が f s と釣り合う位置 y (= h) までスプールは移動する.したがって,サーボ 1/7 弁によって pc を精密に変化させれば,微小な変位応答 y を得ることができる.なお,静圧 軸受には,表面絞り形を採用している.その理由としては,①すきま内流れの過程で空気 を絞るため,自成絞りやオリフィス絞りに比べて,駆動体に微振動(ノイズ)を与えにく い,②将来,アクチュエータの長ストローク化のために,スラスト軸受を多連型構造とす る場合の適合性を見据えて,の 2 点である. Clearance h Output: Force f Aerostatic thrust bearing Air supply Actuated spool pc m Displacement Ab ( y = h) qin Volume V Exhaust Servo valve Load pressure pb 図 1 空気圧サーボ軸受アクチュエータの構造 このように,静圧軸受をアクチュエータとして働かせるにあたり,軸受部を制御対象と して評価する必要がある.そこで,次章にて,軸受部のシステム表現について検討した. 2.2 軸受部のシステム表現 本研究では,軸受部の入出力特性を,図 2 に示すような 4 端子回路論に基づく無次元ダ イアグラムを用いて表す.これは,構成要素内部の物理的プロセスを,軸受の入出力端子 対(位差量/流通量)の関係として捉え直すことに他ならない.この関係をアドミッタン スマトリクスを用いて表すと,以下のようになる.なお,本表現は,他の機器との接続を する場合等,必要に応じて,インピーダンスマトリクスや伝達マトリクスに容易に変換す ることができる. Qc Y11 = Fs Y21 Y12 Pc 0 + − Y22 H − Fb Input Across variables (1) Output Pc H Controlled pressure − Y12 1 YZ −Y22 Y11 Y21 − Fb Qc Through variables Servo valve 1 YL Fs Bearing Load 図 2 軸受部の入出力特性 本研究では,各構成アドミッタンス Yij を動作点近傍で線形化し,軸受に関わる物理関数 2/7 として表現することとした.このとき,各アドミッタンスを伝達関数として捉えれば,図 2 はシグナルフロー線図として取り扱うことができる.なお,各アドミッタンスの関数表現 の導出において,本研究では,森によって提案された集中定数化モデルを導入した.これ は,軸受のすきま内における流れの抵抗や気体の圧縮効果を絞り部等に集中させて取り扱 うとする「集中定数化の概念」と,すきま内の圧力分布は動的変化に対して平衡状態の関 数形を変えないとする「準静的変化の仮定」に基づいている.集中定数化モデルを適用す れば,軸受剛性や減衰係数を簡易的に求め得るだけではなく,動作点近傍における軸受の 動的挙動を伝達関数として表すことができ,制御系を検討する場合等に良好な見通しが得 られると考えた. 表面絞り形軸受への集中定数化モデルの導入においては,絞り溝部外径 R1 での圧力 Pr を 集中定数パラメータの一つとして取り扱う必要がある.一般的な表面絞り形軸受と言えば, 図 3 左に示すように,軸受面に半径方向への多数の細溝を設けた形式,すなわち,周方向 に丘/溝が存在するものが多いが,本研究では,これを,図 3 右に示すような,等価なポ ケット深さを有するポケット付き軸受と置くものとした.なお,これによって導出したア ドミッタンス Yij に関しては,著者発表文献 2)を参照されたい. groove 2 Rs 2 R1 2 R0 2 Rs 2 R1 2 R0 H H Pc P Pc at groove P Pr Pa at ridge Rs δ eq Pc δ R1 R0 R Pa Rs R1 R0 R 図 3 表面絞り型軸受と等価溝深さポケット軸受モデル 2.3 プロトタイプアクチュエータの性能 プロトタイプアクチュエータを試作し,性能評価を試みたところ,以下に示すような結 果が得られた.はじめに,軸受すきまを 7µm とした状態を中心とし,軸受への供給圧力を 可変とするサーボ弁への入力電圧を変化させ,アクチュエータのヒステリシスを測定した (図 4).これより,オープンループ駆動であっても軸受アクチュエータのヒステリシスは ほとんどなく(20nm 以下),良好な位置再現性を有していることが確認できた.また,オ ープンループで 5nm ステップ駆動を行ったときの結果の一例を図 5 に示す.これより,位 3/7 置の明確な切り替えが見られ,位置分解能は 5nm 以下であると言える.また,図 5 より, 静止時での駆動体の微小振れ(ノイズ)はほとんどなく(1nm 程度),高い位置安定性を実 現できることも見て取れる.周波数応答試験を行ったところ,数 100Hz に共振点らしきも のがやや見受けられるものの基本的には典型的な 1 次遅れ系の応答を示し,極めて安定な アクチュエータであることが確認できた. 駆動体変位 h [µm] 10 9 基準給気圧 = 0.3 MPa 基準すきま = 7 um 8 7 6 5 < 20nm 4 3 -0.3 -0.2 拡大 -0.1 0 0.1 0.2 0.3 入力電圧 [V] 図 4 アクチュエータの繰り返し応答性 駆動体変位 h [µm] 7.010 7.005 7.000 6.995 6.990 6.985 0 2 4 6 8 時間 [s] 図 5 アクチュエータのステップ応答(ステップ高さ=5nm) 2.4 まとめ 超精密位置決めを実現する新しいアクチュエータシステムとして「空気圧サーボ軸受ア クチュエータ」を提案し,その基本特性を調べた.本研究で得られた結論を以下に示す. (1) 空気圧サーボ弁によって静圧軸受部への供給圧力を制御し,超精密位置決めを実現す る新しいアクチュエータの基本構成と動作原理を示した.また,アクチュエータを構 成する各要素間の物理プロセス(シグナルフロー)を,4 端子回路論に基づくダイア グラムによって示した. (2) 「集中定数化モデル」を導入することにより,ダイアグラム内の全てのアドミッタン 4/7 スを関数表現し,システムの動的特性を明らかにした. (3) 得られたシステム表現に基づき,アクチュエータの定格推力・流量,剛性,減衰係数・ 安定性,応答を調べた.その結果,表面絞り形静圧軸受はアクチュエータの構成要素 として極めて安定に作動し,超精密位置決めに適しているであろうことを示した. (4) プロトタイプアクチュエータを用いて動作安定性を確認したところ,オープンループ 駆動であってもヒステリシスは極めて少なく,また,5nm ステップの応答も極めて安 定的に実現できることが分かった. 3. 本研究を実施したグループに属する主な研究者の氏名・役職名 平山朋子(同志社大学 理工学部 准教授):研究代表者 松岡 敬(同志社大学 理工学部 教授) 4. 研究実施時期 2007 年(平成 19 年)1 月中旬 ~ 2008 年(平成 20 年)3 月末日 5. 本研究に関連して発表した主な論文等 【論文(査読付き)】 1) Study on Reduction of Nano-Fluctuations of Aerostatic Bearing with Surface Restriction, T. Kitagawa, T. Matsuoka, T. Hirayama, R. Mizuno, M. Kadotani, H. Danjyo, K. Sasaki and H. Yabe, Int. J. of Surface Science and Technology (2008) in printing. 2) 超精密位置決め用空気圧サーボ軸受アクチュエータ(第 1 報)-システム表現に基づく アクチュエータの基本特性の提示, 平山朋子, 佐々木勝美, 矢部寛, 精密工学会誌 (2008) in printing. 3) 超精密位置決め用空気圧サーボ軸受アクチュエータにおける微小振れに関する研究, 北 川貴一, 平山朋子, 松岡敬, 角谷雅人, 檀上弥輝, 佐々木勝美, 矢部寛, 同志社大学理工 学研究報告, Vol. 48, No. 4 (2008) pp. 234-240. 【国際会議(査読付き) 】 4) Pneumatic Servo Bearing Actuator for Ultraprecise Positioning: Part 1, Tomoko Hirayama, Takakazu Kitagawa, Masato Kadotani, Hiroki Danjyo, Takashi Matsuoka, Katsumi Sasaki, Hiroshi Yabe, Proceedings of 23rd ASPE Annual Meeting and 12th ICPE (2008). 5) Pneumatic Servo Bearing Actuator for Ultraprecise Positioning - Basic Performances of Prototype Model, Tomoko HIRAYAMA, Katsumi SASAKI, Ryota MIZUNO, Takakazu KITAGAWA, Masato KADOTANI, Takashi MATSUOKA, Hiroshi YABE, Proc. of STLE/ASME International Joint Tribology Conference (2007) CD-ROM. 6) New Actuator for Nano Motion Using Active-Controlled Aerostatic Bearing, R. Mizuno, T. Kitagawa, M. Kadotani, T. Hirayama, T. Matsuoka, K. Sasaki, Proc. of Viennano'07 (2007) pp. 5/7 169-174. 【解説記事】 7) 静圧気体軸受を用いた超精密位置決め機構(仮題), 平山朋子, 設計工学会誌 (2008) in printing. 8) 静圧気体軸受による非接触搬送機構(仮題), 平山朋子, 油空圧技術 (2008) in printing. 9) 超精密機器における動圧/静圧軸受の設計と技術動向, 平山朋子, 精密工学会誌 (2008) in printing. 10) 静圧気体軸受とその応用, 平山朋子, 佐々木勝美, フルードパワーシステム, Vol. 38, No. 2 (2007) pp. 46-50. 6. 内外における関連研究の状況 静圧軸受を用いた超精密位置決め機構として,過去にいくつか提案されているものもあ るが,軸受への供給圧力を直接変化させ,超精密位置決めを実現させているものは見当た らない.その状況は現在でも変わらないが,本研究の実施および公開により,圧電素子に よる位置決め実現が困難であったメーカーからの問い合わせが急増した.近年,クリーン, かつ,安定なことから,空気圧駆動そのものへの期待も高まっており,時代に即したテー マとであると考えている. 7. 今後の発展に対する希望 本研究で得た知見を活かし,現在は, ① クローズドループ制御によるドリフトや外乱の防止 ② 最小位置決め分解能を得るための軸受形状の最適設計 に取り組んでいる. なお,今年度後期には,図 6 に示すような,6 つの軸受アクチュエータから成る超精密位 置決めテーブルの作成も検討しており,一層の使用用途の拡大を期待している. 6/7 測定・制御機器 X 軸 ACT 干渉計 駆動テーブル Y レーザー ヘッド X ビームスプリッタ Y 軸 ACT (回転防止のため 4 機設置) (a) 上面図 静圧テーブル(給気,吸引により,剛性を確保. ) ACT 同士を対向させるため,押付圧は不要 図 6 提案する超高精度 XY テーブルの基本構造 7/7
© Copyright 2026 Paperzz