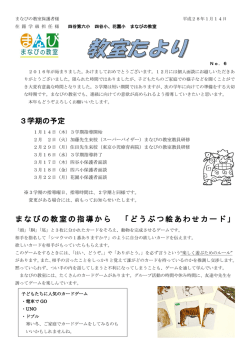
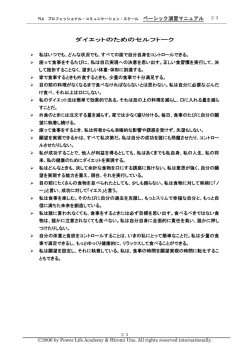
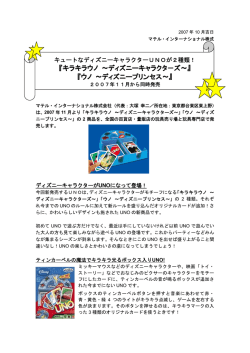
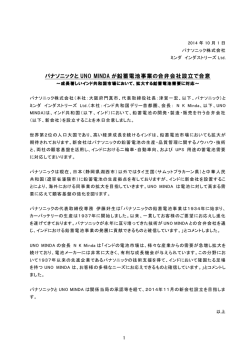
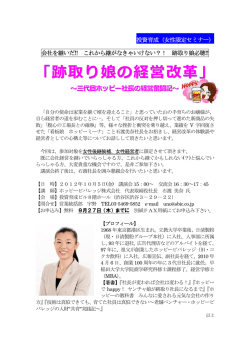
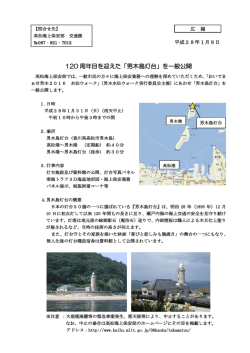
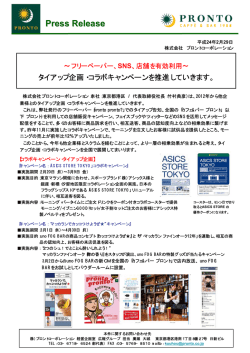
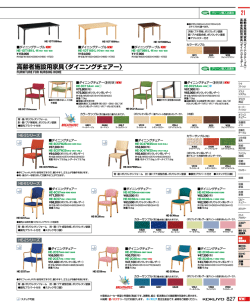
労働科学 4 6巻 9 号( 1 9 7 0 ) (5 2 5) J .S c i e n c eofL a b o u rVol. 4 6 , No. 9 UDC 159.98:656.613:6 1 4 . 8 0 2 操船技能の解析的アプローチ* 善行料 森 清 A NANAL YSTICAL APPROACH INTO THESHIP MANOEUVERING SKILL申 By Yo s h i y u k iMORIKIYO料 Thepurposeo ft h ep r e s e n ti n v e s t i g a t i o ni st oa n a l y z et h es h i pmanoeuverings k i l lfrom t h eviewp o i n to fthei n f o r m a t i o np r o c e s s i n gabout t h emanoeuvering work a tan a v i g a t i o n b r i d g e . I nt h i s paper i sd e s c r i b e d an a n a l y s t i c a l method a p p l i e dthemanoeuveringworki n f e r r yb o a t so fJapanNationalR a i l w a y . The i n f o r m a t i o ni sd e f i n e da st h ep o s s i b l ee v e n t s which a r ei n f l u e n t i a l on d e c i s i o n si nt h e manoeuvering work. Theo b s e r v a t i o n a lmethod hasbeend e v e l o p e d . I ti n v o l v e st h er e c o r d i n g so fcommunications ( v e r b a li n f o r m a t i o n s ) , and samples o b t a i n e d were a n a l y z e dby t h e methodo fl i n ka n a l y s i s . Thecommunicationl i n k s a r egiveni nFigure l ( a ) ( d ) . The f l o wo fi n f o r m a t i o nt r a n s m i t t e dfrommant omanshowed s i m p l e rp a t t e r n sthant h o s eo fac a r g oandtankeri nt h ep r e v i o u ss t u d y . Thei n d i v i d u a lc l i f f e r e n c e si nt h ei n f o r m a t i o np r o c e s s i n ga r e found i n t e r r e l a t i o n s h i p sbetween t h ei n f o r m a t i o n c o n t e n t sandtimes e r i e so ft h ef l o wo fi n f o r m a t i o n( F i g u r e2 ) . Threed i f f e r e n ti n d i c e sa sf o l l o w sseemedt obe a v a i l a b l et oc h a r a c t e r i z ea s p e c t so fi n f o r m a t i o np r o c e s s i n g aboutt h emanoeuveringwork: ( 1 ) Informationd e n s i t y ; Thisindexi sd e f i n e da st h e amount o fi n f o r m a t i o nt r a n s - a p i d 紗 i nt h ei n f 0 1 ’ mationp r o c e s s m i t t e d per minute, andcanbeusedi nt h ee v a l u a t i o no fr i n g . The r e s u l t s obtained on i n f o r m a t i o nd e n s i t ya r eshowni nTable 1 , 2 and3 . These v a l u e sshowhigherl e v e lwhilee i ; i t e r i n gt h ep o r t . ( 2 ) R a t i oo fa u x i l i a r y i n f o r m a t i o nr e t r i e v a l ; This index i sd e r i v e dby d i v i d i n gt h e amounto fa u x i l i a r y i n f o r m a t i o n ( i n p u ti n f o r m a t i o n s ) byt h o s et r a n s m i t t e d( o u t p u ti n f o r m a t i o n s ) from t h ec a p t a i n . This indexcang i v e ameaningfulli n d i c a t i o no fu n c e r t a i nり ande x t e n s i - v e n e s si nt h ei n f o r m a t i o ns o u r c e s . Ther e s u l t so b t a i n e da r eshown i n Table 4 , 5 and 6 . I t i si n d i c a t e di nt h et a b l e st h a tt h es c o r e so ft h i sindexa r e higherwhilen a v i g a t i n g . Figure 3 ( 1) 一 (4 ) show t h er e l a t i o n between t h i s index and the degree o fe x p e r i e n c eo ft h es h i p manoeuverer. Someproblemswerep o i n t e do u tt obesubmittedt od i s c u s s i o n s . *この研究は昭和 4 3 , 44年度,文部省科学研究費「一般研究」によっておこなわれたものの一部である。 料 労 働 科 学 研 究 所 ・ 労 働 心 理 学 研 究 部 ・ 労 働 心 理 学 第 1研究室 L a b .o fP s y c h o l o g y( I ) ,D i v i s i o no fP s y c h o l o g y ,I n s t i t u t ef o rS c i e n c eo fL a b o u r (526) ( 3 ) Ratio o fs e l f r e t r i e v a lo f information; The r a t i oo f output i n f o r m a t i o nt ot h e sumo foutput andi n p u ti n f o r m a t i o ni sc a l l e dt h es e l f r e t r i e v a lo fi n f o r m a t i o ni n d e x . This i t n e s soft h ei n f o r m a t i o nr e t r i e v a l . R e s u l t so b t a i n e d concerning indexi susedt odeterminef t h e index a r e shown i n Table 7 , 8 and 9 . Someo ft h er e s u l t sshowhigherl e v e l swhile e n t e r i n gthep o r t . I . はじめに 船舶を船橋で操縦するさいに必要な技能の特色を,狩 動作完了の報告を含むフィードパック情報と考えられる ので,一つの情報とみなした。操船中の私語は情報とは 考えない。 里 子 1) は海難経験に関する調査から次のように記述して I I .調査 いる。「情報の収集,綜合判断及び意思決定にわたって 時間的制約があり,且つ試行錯誤が許されないところ が,他の高度の技能に比して際立った特性である」。そ して,操船者の知識とか経験にもとづく予測機能が情報 の収集,綜合判断,意思決定に大きな要因として作用し ていると述べている。さらに,この予測を修正したり, 綜合判断を適正ならしめる方法として,船橋にいる他者 からの適切な報告および助言が有効であることを認めて 1 (\ る 。 操船技能の性質を解明していくためのアプローチには A . 対象 今回の調査では連絡船を対象としたが,それは下記の ような理由によった。 ( 1)短期間に集中的に多くの資料が収集できる。 ( 2)短期間に調査を集中するため,海象,気象等の条 件を比較的斉一に保つことができる。 ( 3)同じ港での出入港資料がいくつかとれるので,地 理的条件が同じ場合の船種別,規模別の資料の比較が容 易である。 いくつかの方法があると思われる。一つは運行中の船舶 ( 4 )操船者は毎日同じ港を出入するため,港に対する が危機的状況に直面したさいに,操船技能がもっとも特 慣れがあり,状況に対する適応度をあまり考慮する必要 徴的にうき彫りされてくるであろうという仮定のもと がない。 に,海難事故のケースを調査する方法で,記述的アプロ 実際に調査を行った航路は宇高航路と青函航路の二つ ーチとでもいえる方法である。また,操船技能に関連が の航路で,計38航海の資料が得られた。宇高航路では出 あると考えられる人間の機能の側面をテストによって測 港から入港 FIE までを連続記録,青函航路では離岸か 定する方法がある。これはテスト的アプローチである。 ら船長の降橋までを出港時, S / Bから F/E までを入港 さらにもう一つの方法は,実際の船橋作業を観測,分析 時として記録した。 し,外界と操船者との関与の仕方などから技能を分析す る,いわば解析的アプローチの方法である。 二つの航路での出入港時の船の動きは次のとおりであ る 。 この報告は第 3のいわゆる解析的アプローチの方法に 宇高航路:高松出港時は入船の状態で着岸している船 関するものである。しかし,この報告が操船技能の解明 をひき出し,港内で回頭する。宇野入港時は入船の状態 にまでたちいたっていないのは,解析的アプローチがま で入港する。同出港時は回頭して出港。高松港入港は入 だ緒についたばかりであるため,現段階では方法そのも 船の状態で着岸する。 のの吟味が重ねられなければならないからである。 青函航路:函館港出港時は出船の状態で着岸している このアプローチの最初の試みについては,すでに報 船をそのままの形で出港させる。青森港入港は港内で回 告 2)した。主たる方法は,出入港時の船橋において,取 頭し,出船の状態にして着岸する。青森出港はそのまま り交された言語情報を聴取,記録することである。ここ 出港。函館入港時は港内で回頭し,出船の状態で着岸す でいう言語情報とは,操船に必要なすべての情報を指 る 。 す。ただし,ある情報の単なる復唱は除外した。例え B . リンク・アナリシス ば,船長から「ハード・ポート」という操舵命令が出た 記録された言語情報をその流れの方向(誰から誰に) とする。これは一つの情報と数えられるが,そのあとで と頻度について整理する。 操舵手は直ちにこれを復唱する。この復唱は情報とはみ 新鋭外航船の結果は先に報告した。そこで、は,操船補 なさない。舵をハード・ポートにしたあと,操舵手はも 助者に対する命令系統はパイロットと船長の二系統にな う一度「ハード・ポ}ト」という。これは船長に対して り,情報のネットワークが複雑になっていること, ま ( 527) ③ ⑭ CAPTAIN ⑩ 日 図1 ( ・a ) 青森入港時 図1 ( ・c ) 高松から宇野へ航行中 F i g .1 ( ・a ) A r r i v a la tAomori time; 1 7 5 8∼1 8 1 5 ( 司 1 0messages → 5messages → 1message) ⑤ k ろ ) / F i g .1 ( ・c ) VoyagefromTakamatsut oUno time; 6 3 1∼7 1 5 ⑭ 仰山\ 半~PTAI ⑩ ⑨ ① 図1 ( ・b ) 青森出港時 F i g .1 ( ・b ) DeparturefromAomori time: 1 9 1 0∼l9l6 図1 -( d ) 高松から宇野へ航行中 F i g .1 ( ・d ) VoyagefromTakamatsut oUno time; 2 3 0 3∼2 3 4 5 (528) た,補助者の人員の配置が情報のネットワークをかなり 調査の対象になった連絡船はいくつかの点において商 の程度,規定していることがわかった。タンカーのよう 船とは事情がことなっている。その一点は,大部分の船 な巨大船の場合3)には情報の中継の行われることが多い が旋回性能をよくするためにパウ・スラスタ}を装備し こともわかった。 図 1( 一a) ∼ (b)はこの調査によって得られた結果の例 である。 ていることである。この装置は着岸・離岸操船のさいに, 船速がなくても横方向推力の出せるもので,船体の停止 状態で最大の回頭効果があり,これらの性能は連絡船の 図 1-(a)は青函航路8000トン級客船の青森港入港時の 操船にとってはうってつけのものである。このパウ・ス 結果である。先にも記したように,この入港時の操船は ラスターに関する情報が商船の場合とはちがって新たに 回頭しながら接岸するという複雑なものである。図の 加わった情報であるが,実際には船長がみずからパウ・ 01 は船橋のコントロール・スタンドの前に配置し, 主 スラスターを操作する場合が多いので,情報として記録 として船長からの船の速度に関する情報を受け取り,速 できないこともあった。第二点は連絡船は陸上の列車ダ 度制御に関係ある機器の操作に当る。また,船橋にあっ イヤと合わせて運航されるので,運航時刻はきわめて制 て船長の操船を補佐する意味でそれぞれの持場との連絡 約をうけている点にある。このため,船の進行と運行ダ に当る。三等航海士または二等航海士がこの部署に配属 イヤとの関係を示す情報が新たに加わる。 される。 Q/M1 は船長からの船の方向に関する情報を受 以上の 1 1 種の情報の中で,もっとも基本的でかつ重要 け取り,操舵の任に当る。 0 2 , Q/M2は外界の情況を逐 な情報 4種 (1 ,4 ,2 , 6)をとりだし,船橋での実際の情 時船長に報告する役目をになっている。 報の流れを時系列的に示したのが図 2である。青森港入 図をみてもわかるように情報の流れの中心は船長にあ 港時に船長に入ってきた情報,船長から出た情報のみに り , 01 は情報の中継的な役割を果している O 情報の頻 ついて示したものである。 4種の情報のうち, 1の操舵 度からみれば,船長から 01への船の速度に関する情報 に関する情報と 4のパウ・スラスターの操作等に関する が多い。これは固定物(岸壁)に近づくさいの速度制御の 情報をまとめて,船のコースに関する情報とした。 困難さを示すものといえよう。図 1( 一b)は同じ船が約 1 図 2-(a)( b)はともに 8000トン級客船が日中に同じ港 時間後に青森港を出港するさいの結果である。情報総数 にはいるときの結果である。(a)の場合は船長経験 9年 , のちがいが非常に大きい。また情報の流れもきわめて単 ( b)の場合は船長経験 8年で経験年数からみても同じ程 品屯になっている。 度である。しかし 情報の流れを時系列にみてみると,か J 図 1( 一c )( d)は宇高航路での高松出港時からあとの航 なりの差異がみられる。「入港 S / B J情報が発せられた 行中の結果である。( c)は早朝,(d)は真夜中の航行によ 時刻でもすでに 4 . 5 分の差がみられる。「 s t o pengine」 の るものであるが,夜間航行では航海士官からの他船に関 情報が初めて発せられた時刻で約 3分の差がある。この する情報が非常に多く出ている。この時間帯は航路を横 ように,( a)ではかなりの時間的余裕をもって操船してい 切る船舶が多いことにもよるが,外界の情報の収集が夜 るように見受けられるが,( b)の場合には短時間のうち 間にはきわめて困難になるため,操船者にとっては補助 に操船を完了するような型である。したがって,(b)で 情報が必要になってくることを示すものである。 J C . 情報の内容と時系列パターン 資料の整理にさいし,情報を次のような種類に分類し T こ は接岸していくにしたがって情報の流れは次第に頻繁に なってきている。このように情報の流れの時系列ノfター ンは操船者によってかなりの差異があることがわかる。 このことは操船技術の面には次のようなかたちで、あらわ O 1 操舵に関する情報 2 速度に関する情報 3 他船に関するすべての情報 れる。( a )( b)の操船命令をこまかく対比していけば明ら かになることであるが,(b)の方が船速の一回の制御量 が大きい結果となっている。船の制御回数は(a )( b)とも 4 パワ・スラスターの操作等に関する情報 にほとんど変らない。これはある地点からある地点まで 5 タグボートに関する情報 船を動かすにはほぼ一定数の操作が必要で、あることを示 6 固定物(例えば岸壁)との距離に関する情報 し,いわば標準作業的なものがすでに設定されていると 7 出入港作業に伴なう人員配置に関する情報 みることができる。一定標準作業をちがった時間内で、完 了しようとすれば,制御量を変える以外にはない。(b ) の方が制御量の大きいのはこのような理由によるものと 思われる。情報処理における個人差の問題としての意味 )は 3000トン級の貨物 を考えさせられる事柄である。( c 8 係船に関する情報 9 海象,気象に関する情報 10 運行ダイヤに関する情報 11 船のコンディションその他の情報 (5 2 9 ) 1 q 1 8 S / B 1 7 1 6 I S " 14 。 + , , I 1 3 コ 1 2 E 1 1 C : . ・ . . . 己 1 0 . . . . J C f コ 〉 〈 : ( ι 8 巴 ;~ 7 ・ ト , ー O 6 |凶 亘 : , ト ー ヲ 4 3 2 。 2 草 ι 1 ff 1 ~ 長 言 百 1 5 5 ’ 咽 、 , se x p e r i e n c e; 9 Y e a r si ncaptam’ moo∼ Time; 、 、b r (a) 8 ∼ lQOO (C) 1 1 2 0 0 図 2 入港時における操船情報の流れ F i g . zTheFlowo fManoeuveringInformationswhileEnteringPortf o rA r r i v a l (530) 表 1 情報密度;宇高航路 のあと,船の速さは次第に制御されてくるが,情報に示 Table 1 InformationDensity; (Uno-TakamatsuL i n e ) された所定の速さにいたるまでの経過を逐次,船長に報 告する。この報告はフィードパックとしての性質をもつ もので,これをいまフィードパック情報という。( C) の 場合にこのフィードパック情報が多量にでているが,そ 剛 E 報 社 忠 醤 臣 ト同 詰 句 凸 ω ♀4 の理由には次のようなことが考えられる。第一点はター 〉 じ ミ捜 U 産 骨 国 同 . 骨 υ ω 口 ;ロ 同 g がかかる。したがって機関の働きの時間的経過を知ると 件ヲ いう意味においても多くの情報を必要とする。第二点は 。 z a fs 担 E ー 当 r 1 f J1 主 額 型 畦 吋 自 : ロ 小 ' i A 1 6 B C 1 1 D 1 8 E F 1 2 1 3 8 G 2 . 4 2 . 8 2 . 5 2 . 6 2 . 8 2 . 0 3 . 8 2 . 0 3 . 3 ビン機関であるために,所定の速さにいたるまでに時間 地 経験年数に関係がありそうである。経験の浅い場合に 1 . 01 . 62 . 8 0.9 . 13 0 . 84 . 10 . 83 . 4 2 . 15 . 46 i g h t . 32 . 72 . 8 n 1 . 43 . 82 . 5 0.7 5 . 0 . 2 12 . 5 2 . 55 3 . 6 5 . 4 2 . 24 . 62 . 14 i g h t . 52 . 5 n . 9 1 . 80 . 52 1 . 05 . 42 . 20 . 5 3.4 は,自己の感覚器官からいろいろな情報を幅広く集める ことができないため,他からの補助的な情報の必要がで てくるのではないかと思われる。フィードパック情報は この補助的な情報という意味をもつものである。( C )に 示した例が以上のどちらの理由によるものであるかを速 断することはできないが,経験年数との関係も重要なポ イントであると考えられる。 D. 情報処理の指標 いままで、は’情報を定性的に扱ってきたが,情報は定量 表 2 情報密度におけるサイン・テストの結果;宇高航路 Table2 Summaryo fSignTesti nI n f o r m a t i o nD e n s i t y ; (Uno・TakamatsuL i n e ) 。 口 ω 4 口 E 。 口 j 歯 ∞ ロ j 製 逗J ~ 1 → 〆 ~哩 4 戸 E r o 促 ~ ロ ; H i 之 r 日戸 小;¥I 明 山 r f鴨 石 “ . 白 』 ト 日 戸 { 量 ト百 TakamatsuDep. 高松出港 Takamatsu → Uno 高松→宇野 UnoA r r i v . 宇野入港 P<. 0 1 1 P<. 05 P<. 0 Uno出 D港 e p . P<. 0 1 宇野 Uno → Takamatsu 宇野→高松 TakamatsuA r r i v . 高松入港 P<. 02 P<. 0 1 P<. 0 1 P<. 02 P<. 02 P<. 01 P<. 02 船(タービン機関)で操船者の経験年数は 1年未満であ 的に取扱うことのできる利点もそなえている。以下は今 る。もっとも特徴的なことは,船の速さに関するフィー 回考案した情報処理に関係のある指標について記す。 ドパック情幸民が多いということである。ここでいうフィ 1 . 情報密度 ードパック情報とは次のようなものである。船長がその 操船者としての船長を中心にした船橋における情報の 時の情況にしたがって船あしを落すために船速の制御に 流れを考えてみると,情報には船長に向って入ってくる 関する情報を発したとする。コントローノレスタンド前に 情報(入力情報)と,船長から発せられる情報(出力情報) いる操船補助者は機器を情報のとおりに操作をする。そ の二種類がある。この二種類の情報の総計を操船所要時 (531) 表 3 情報密度;青函航路 Table3 I n f o r m a t i o nD e n s i t y (Aomori-HakodateL i n e ) 表 4 補助情報検索比;宇高航路 Table4 R a t i oo fAux-informationR e t r i e v a l ; (Uno・TakamatsuL i n e ) 主 義 訴 吐 摺 錨 u 阜 託 ~ ω i ~~ 凶 H ~ 同 口 邑 υ ω 関. S J K L M N 器 題 国 ヨ 誕 ヨ 4 自 54 百 ー 出 苫 む え 同 P C : 口 甘 H I ]g 凸 企 a / 円 。 8 9 9 1 0 4 . 1 4 . 7 4 . 8 4 . 1 6 2 . 4 1 . 8 。 。 。 規 様 : ! く 津 岳~戸捜 酔 犠 司 5 . 8 4 . 7 3 . 2 5 . 6 5 . 8 2 . 0 5.4 6 . 5 5 . 7 5 . 1 4 . 8 3.7 2 . 9 3 . 2 表 i t 右 ω 己 若 誕 者 戸 困 1 / く f 百→ 3 . 6 6 . 0 7 . 0 6 . 5 3 . 5 4 . 1 ~ 。 出 三 是 器 誕 時ト 百 回 国 g 同 詰 ロ : h 周 凸 ω4 t ~ ~ f a耐 1 卑 主 型 4 主 : 【 A 1 6 B C 1 1 D 1 8 E F 1 2 1 3 G 8 ザ=吋自; 2 . 4 2 . 8 2 . 5 2 . 6 2 . 8 2 . 0 3 . 8 2 . 0 〈 〉 何 H 者 乏 ル別 2 地 召 S 。 E日戸 4 歯 ト 4 ぷ 胃 : ヨ促 卑 提 F く | t , h 1 . 01 . 62 . 80 . 9 3.2 . 13 . 10 . 8 3.4 0 . 84 i g h t 2 . 15 . 32 . 72 . 46 . 8 n 1 . 43 . 82 . 50 . 75 . 0 2 . 55 . 22 . 5 3 . 6 5 . 4 2 . 24 . 62 . 52 . 14 . 5 night . 9 0 . 82 . 41 . 80 . 52 3. 3 1 .0 5. 4 12. 2 0. 5 1 3. 4 5 補助情報検索比におけるサインテストの結果;宇高航路 Table5 Summaryo fSignTesti nt h eRatioo fAux-informationR e t r i e v a l ; (Uno・TakamatsuL i n e ) r f 口 。 S 民 i猷 凸 ロ E n ~~可d 怒 主J ~ 1 正 哩 己 昔~ T 話 : 1 ト a 手 g i 虫 戸 j 之 醐 2 { 歯 恥 日 戸 地 迫 小 量 { ' i t g ~ ; ヨ ロ 二 弱 者 世 i 卑 山 TakamatsuDep. 高松出港 Takamatsu → Uno 高松→宇野 UnoA r r i v . 宇野入港 P<. 0 1 P<. 0 1 P<. 0 1 U野 no 出D 港 e p . 宇 Uno → Takamatsu 宇野→高松 TakamatsuA r r i v . 高松入港 P<. 02 P<. 02 P<. 0 1 P<. 0 1 P<. 02 P<. 02 P<. 02 P<. 02 聞で、割ったものを情報密度とする。ここでは 1分聞に交 ために決めた便宜的なものである)で,この間に 1 5 秒に わされた情報数として表わした。表 1は宇高航路の結果 1回の割合で情報は流れていることになる。出港の所要 である。表 2はサイン・テストによる検定の結果を示 時間は平均約 1 6 . 5 分間で,この聞におよそ 2 3 秒に 1回の す。とれらの表からもわかるように,入出港時の港によ 割合で情報は流れている。航行中の所要時間は約4 3 . 5分 る差異はない。情報密度の高い順に示すと次のようにな 間で, 45秒に 1回の割合となっている。この結果から, る 。 入港時に情報密度の高いことがわかる。表 3は青函航路 入港時>出港時>航行中 入港の所要時間は平均約 9分間(この値はこの調査の の結果である。入出港による差はなく,出港時は平均 1 5 秒に 1回,入港時は平均1 2 秒に 1回の割で情報が流れて ¥532) 表 6 補助情報検索比;青函航路 Table6 Ratioo fAux”informationR e t r i e v a l; (Aomori-HakodateL i n e ) ARRIVAL 句 u “ q 何 国 ~ s 誕 主 宣 : f − 出 告 苦 回 国 。 H I J 6 3 . 2 1 . 6 2 . 0 2 . 6 2 . 2 4 . 1 1 . 2 1 . 3 1 . 7 2 . 0 3 . 1 2 . 0 2 (4) t : , . 0 。 A 0 冒E qu 司 ’ 。 。 h 。 1 0 8 2 4 6 8 X 1 0 3 ! GROSS TONNAGE 色 ,A 6 YEARS OF CAPTAINS EXPERIENCE A 6 0 4 ’ ' n﹃ JH4 ﹀同何回L F 白同 ZOHF4 F何回HIHD4 ﹄ODHUF4珂 冨再O 0 A t ; . (3) DEPARTURE 6 ム 0 QUAAAEUA 2.4 1 . 8 3 . 7 2 . 9 3 . 2 d製 君 困 ベ 事 官」選宮温 − 2 . 9 1 . 8 1 . 7 1 . 9 2 . 8 : 4 ロ 。 H 恥 塑 τ e 0 quqA 。 。 。 2 . 8 2 . 1 2.5 2.9 〈 与 〉 ド4 • 山司﹀同H同L F同国 EDH 4再出O﹄ZHl阿国4hooHFH4同 K L M N 七 ロ 。 日 君 主 捜 T 蝶 く 。 凸 ω4 。 A n﹃ 8 9 9 1 0 ド じ 〉. 。 0 冒・ 耳 同 鑑 C 型 L 何 ’ 耳 ロ 4 ~ 2 o 司A 口 ω4 qu H4 ﹀同H出U F同 岡 田OHbF4属国口品同HlHD4hDOHUF4同 。 目“ω虫~ ~ U 試 皐 n﹃ 主 社 義 t : , . 図 3( 1 )( 4 ) 補助情報検索比と船長経験年数, 総トン数との関係(ム函館港 HakodateO青森 港 Aomori) ー (4 ) R e l a t i o no f Ratioo f Aux・i n f o r F i g . 3( 1) mationR e t r i e v a lt oYearso fCaptain’ sExperience andGrossTonnage 司 4 sノ , 、 、1i /T 、 ‘ 2 6 8 1 0 YEARS OF CAP!AINB EXPERIENCE 『 いる。 2 . 補助情報検索比 4 することは,船の規模がある程度以上に大きくなった場 3 2 0 I : : , , 。 合には不可能である。そこで先に述べた入力情報が必要 0 4凸 A A a o o o H4﹀同H岡 山F 同 回 目OHUF4 再出口﹄同HIHP4hooHF4 出 − 操船者が操船に必要なすべての情報をただ一人で収集 になってくる。実際には, 3/0,σ Mが船橋にいて船長 の操船を補佐し, また贈では C/0が,艇では 2 / 0がそ れぞれ必要な情報を船橋に送る。いま,船長に向けられ て発せられる』情報の一つ一つを補助情報(入力情報も同 じ意味で用いられる)と名づけることができる。船長が 操船命令(出力情報)を出すさいには,自分の感覚器官 (2) ・ 2 4 6 GROSS TONNAGE 8 X1 0 3 t を通して入ってくる情報と,補助情報を参考にした上で、 その状況に応じた情報を出すのである。その場合,船長 に入ってくる補助情報のすべてが,現在の状況に対応す るために必要なものばかりとは限らない。数分後に必要 (533) 表 9 自己検索率;青函航路 Table9 R a t i oo fS e l f r e t r i e v a lo fInformat i o n ; (Aomori-HakodateL i n e ) 表 7 自己検索率;宇高航路 Table7 Ratioo fS e l f r e t r i e v a lo fI n f o r m a t i o n; (Uno・TakamatsuL i n e ) 主 義 唱 卑 ~C吋ロ-コ日h目 j。 吋 〉 : ・ ' 脚 之 " 戸 2歯 { 小 1 6 B C 1 D 1 8 1 1 2 1 3 8 皐 U ~ g J ; Eぷ~ 捜 司 同 15 一 A E F G 〈 〉 H ト• 凸 ω4 社 醤 誕 ト ー モ ; 苫 凶 苫 ロ ~ f 端 卑 に # 吋 白 . ) . . . b 』 40.9 3 1 . 0 42.9 9 .32 5. 74 4 .4 3 8 . 9 3 3 . 3 44.8 3 i g h t 34.9 1 7 . 8 47.9 40.72 8 . 35 4 . 1n 43.9 3 3 . 9 44.1 43.23 4 . 253.3 3 3 . 3 1 8 . 4 36.7 4 . 1 30.2 2 2 . 9 50.0 4 H I J K 38.5 3 41.4 3 . 3 39.5 39.0 2 2 . 01 8 . 047.2n i g h t 54.2 45.53 3 . 35 1 . 4 iI 高 c i . 曜 醐 声 E • ,j~自 " 宮 苦 ; 誕 様 : く 日 。 4 ロ 司 塑 長 刊i ! I : j i イ 同 号 汽 き ベ 捜 壊 困 25.9 45.7 2 3 . 8 4 2 . 9 3 8 . 9 3 6 . 5 34.2 3 7 . 1 2 8 . 6 3 3 . 1 2 7 . 6 2 5 . 6 26.7 3 3 . 3 2 4 . 1 21.3 3 3 . 3 26.2 3 2 . 3 9 1 0 6 4ロ~ 凸 3 5 . 1 8 9 N 7. 0 51.2 4 46.0 3 8 . 6 1 3 7 . 547.9 題 担 世 品 国 。 。 。 。 L M r f 〈 〉 与 ト ィ . 2 9 . 6 3 5 . 7 3 0 . 9 1 9 . 7 25.4 23.6 表 8 自己検索率におけるサイン・テストの結果;宇高航路 Table8 Summary o fSignTesti nS e l f r e t r i e v a lo fI n f o r m a t i o n;(Uno・TakamatsuL i n e ) ~。 ~ 凸 f r j υ ロ コ 司 ~ 京 逼J ~斗哩 J , ' I ャ 同 臣 官 司 峠 1 b記 1 : i 〈 何 〉 1 i 之 日 戸 歯 { ト 軒 山 1 / 唱 主 山 ヰ ・ 口。, 』 6: ト 昔 H 雪 目 ロ 組 阻 卑 ベ ¥ i TakamatsuDep. 高松出港 Takamatsu → Uno 高松→宇野 UnoA r r i v . 宇野入港 P<. 0 1 P<. 0 1 P<. 0 1 UnoDep. 宇野出港 Uno→ Takamatsu 宇野→高松 TakamatsuA r r i v . 高松入港 P<. 02 P<. 0 2 P<. 02 P<. 0 1 P<. 0 1 となるであろう情報も含まれているであろうし, P<. 02 また この指標は情報源の範囲が広いときなどに,その数値が 2 , 3の補助情報の蓄積が一つの意思決定に必要なもの 大きくなり,その意味では,操船に必要な情報検索の多 となることもある。船長はたえず入ってくる補助情報と 様性を示す指標と考えることができる。表 4は宇高航路 現在の船の状況を対応づけながら操船命令を出していく の結果で,表 5は検定の結果を示したものである。補助 のである。そうした意味では,たえず補助情報の検索を 情報検索比の大きい順に示すと, 行っているわけである。ここでいう補助情報検索比とい 航行中>出港中>入港中 うのは,船長が一つの出力情報を出す場合に,補助情報 となる。これは先にも触れたように,航海中は順調であ がどれだけ入ってくるかということを示すものである。 れば出力情報がきわめて少なし入力情報の蓄積が多く (534) なるためである。また夜間の航行中は多くなる傾向があ る 。 最後に,この解析法のこれからの発展のためと,操船 技能へのアプローチへの今後解決さるべき問題点を指摘 表 6は青函航路の結果である。入出港による差は見出 しておく。 されない。図 3は船長経験年数あるいは総トン数と補助 1 . 情報の内容分析を詳細に進めること。操船の状況 情報検索比の関係を示したものである。図 3( 1 )( 2) は に慣れてくるほど,伝達される情報にこまかな内容の指 出港時,図 3 ( 3 )( 4 )は入港時の結果である。入港時には 定のない場合がある。つまり操船者が補助者にこまかな 経験年数が多いと,補助情報検索比が小さくなる傾向が 操船命令をあたえないで,ごく大ざっぱな命令をあたえ 見られる。また,総トン数が小さいと補助情報検索比が て操作をまかせるような場面がしばしばみられる。操船 大きくなる傾向が認められた。 3400トン級の船長の経験 システムがもとからそうなっておれば問題はないが,任 年数はすべて一年未満であるため,補助情報検索比の大 意にシステムを変換することは,情報の伝達にあいまい きくなる理由が,経験の不足によるのか,あるいは船の さを増すことになり,処理の上で誤謬を生ずることにな 種類あるいは規模によるものか判然としない点はある りかねない。またときには操船命令の訂正とか補正,さ が,検索の多様性が認められることは事実である。 らには忘却による確認などが認められることがある。こ 3 . 自己検索率 れらの情報の発生過程と内容分析を進めていくととは, 操船者はすくなくとも出力情報の数だけは情報の検索 海難におけるヒューマン・ファクターの一面を明らかに を行っているはずである。その他に感覚器官等から入っ するために重要なことであろう。 てくる情報の検索ももちろん行われているが、それはこ 2 . ここに記された解析法は主としてマン・マン・シ のような調査の方法では知るよしもない。出力情報とし ステムのなかで適用されるものであるが,マン・マシン て出された情報の数だけはすくなくとも意思決定がおこ ・システムにも適用できるよう解析法を発展させていく なわれているはずであり,このことがもっとも確からし ことが望ましい。そうすれば一般産業にも適用できるで いことである。これをいま自己検索と呼ぶ。自己検索率 あろう。計器からの情報の収集,機器への情報の伝達に とは,入出力情報の中で占める自己検索の割合というこ 関する解析法を早急に開発する必要がある。 とで示され出力情報を入力情報と出力情報の合計で除し 3 . 例えば情報処理に関する指標と生体負担に関する た値の百分率で表すものとする。この指標は操船に必要 指標との関係をなんらかのかたちで明らかにしておく必 な情報検索の適合性を示すものであるともいえる。 要がある。このことは,情報処理に関する指標を意味づ 表 7は宇高航路の結果で,表 8はその検定の結果を示 ける上でも必要なことであり,将来,「労働」を情報処理 したものである。自己検索率の大きい順は補助情報検索 的な観点から捉えようとするときにはきわめて重要な知 比とは逆で, 見となるであろう。 入港時>出港時>航行中 (この調査は同僚の飯田裕康氏, 吉竹博氏, 海上労研 となる。入港の場合には自分で情報を検索し,意思決定 の大橋信夫氏らと共に行ったもので,その資料をもとに をする割合がもっとも多いことを示している。表 9は青 筆者がまとめたものである)。 函航路の場合であるが,入出港による差は見出されなか 参考文献 った。 I I I . おわりに 言語を手掛りにした解析法にはいくたの難点と限界が ある。入出力の関係から人間の行動の機構をアプローチ しようとするいわゆるブラックボックスの考え方に共通 な欠点を克服することはここでも困難であった。乱暴と も思える仮定があまりにも多すぎた。このことは情報処 理の指標についてもいえることである。 1 )狩野広之:海上衝突事故の心理的側面の考察, 海上労働科学研究会報 6 9号 , 1 9 7 0 . 2)森清善行:外航船乗組員における労働負担( i l l ) , 労働科学, 4 3( 4 ) ,2 5 2 2 5 4 ,1 9 6 7 . )海上労働科学研究所:操船技術構造に関する研 3 究,第 5報,「IV超大型船における操船作業の 実態調査(第 1報 )J , 656 7 ,1 9 6 8 . (受付: 1 9 7 0年 5月 7日 )
© Copyright 2026 Paperzz