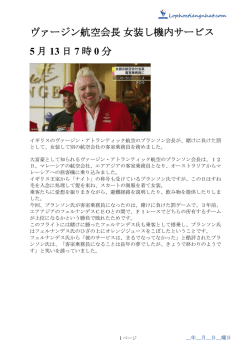
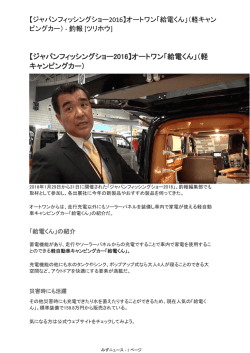
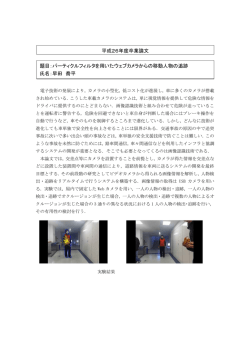
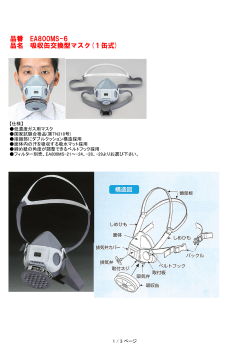
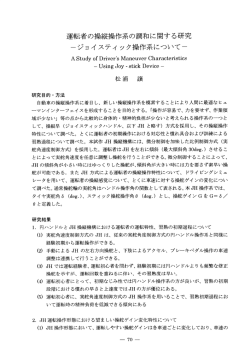
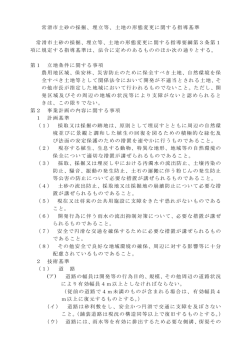
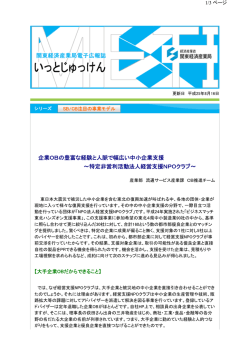
036-041_A05.qx 2002.2.21 4:38 PM ページ 36 論文・報告 RoboCopterの自律飛行についての研究 Research Surrounding Autonomous Flight of the RoboCopter 宮森 剛 Gou MIYAMORI 赤坂 剛史 Takeshi AKASAKA 中村 優 Masaru NAKAMURA 川田工業㈱航空・機械事業部 製品開発部技術開発課 川田工業㈱航空・機械事業部 製品開発部技術開発課 川田工業㈱航空・機械事業部 製品開発部生産技術課課長 無人ヘリコプタが災害監視活動に代表される広い範囲にわたるミッションを遂行するためには,ヘリコプ タの自律飛行制御技術が重要になる。本研究では大型産業用無人ヘリコプタであるRoboCopterの自律飛行 制御の実現を目的として,制御システムの開発を行っている。ヘリコプタは速度や高度変化により特性が 大きく変化してしまうため扱いが難しい。しかし,飛行条件をホバリング周りに限定すれば,線形近似が 適用でき扱いが簡単になることから,前年度はRoboCopterのシステム同定試験を行い,ホバリング周りの 数学モデルを求めた。ここでは前年度に得られた数学モデルを用いて制御系を設計し飛行試験を行ったの で,その内容と結果について報告するものである。 キーワード:RoboCopter,飛行試験,自律飛行 1.はじめに 2.座標系 従来,無人ヘリコプタは農業分野において主として農 使用する座標系を図1に定義する。ここでは機体固定 薬の散布などに使用されることが主流であった。ここで 座標系(X B,Y B,Z B)と地球固定座標系(X E,Y E,Z E)を定 はオペレータと呼ばれるラジコン操縦者が機体姿勢を目 義する。 視で確認しながら操縦を行っており,飛行範囲もオペレ 機体固定座標系 ータから半径200 m程度の円内という狭い領域に限られ 機体重心を原点とし,機体前方にXB軸,下方にZB軸を たものであった。ところが近年の無線技術の向上により, とる右手直交座標系 特定小電力無線電波を使用して半径数kmといった比較 地球固定座標系 的広い範囲において機体をコントロールすることが可能 となってきている。昨今では火山災害などの現場におけ 地上における特定の固定点を原点とし,東方向にXE軸, 鉛直上方にZE軸をとる右手直交座標系 る無人ヘリコプタの活躍も報告されている。無人ヘリコ プタが災害監視活動に代表される広い範囲にわたるミッ ションを遂行するためには,オペレータの目視によらな い自律飛行制御技術が重要になる。 YB 本 研 究 で は 当 社 保 有 の 大 型 無 人 ヘリコプタである RoboCopterの自律飛行制御系の開発を行ってきた。前年 度は制御系設計を行うためにRoboCopterのシステム同定 試験を行い,ホバリング周りでの数学モデルを構築した。 今年度はそのモデルを利用して制御系の設計および飛行 試験を行ったので,その内容と結果について報告する。 XB ZE ZB 図1 36 川田技報 Vol.21 2002 YE 機体固定座標系と地球固定座標系 XE 036-041_A05.qx 2002.2.21 4:38 PM ページ 37 3.飛行制御システム 4.制御系設計 図2にRoboCopterの制御システムのブロック線図を示 図3a),3b)に飛行制御系のブロック線図を示す。こ す。機体の操縦にはラジコン操縦者によるラジコン操縦 こではサイクリック前後,サイクリック左右,コレクテ モードと,制御コンピュータによる自動制御モードの2 ィブ,ヨーの各軸の間のカップリングは考慮しない構造 つのモードがある。ラジコン操縦者はプロポ上のスイッ となっている。図3a)は機体の水平位置を制御するため チを切り替えることで,この2つのモードを任意に切り の位置制御系である。機体の水平面内の移動制御にサイ 替えることができる。機体にはレーザを用いた対地高度 クリック2軸(前後,左右)アクチュエータを使用する。 計,姿勢角や姿勢角速度,加速度を計測するための慣性 指令は地球固定座標系におけるXE,YEにて与える。フィ 測定装置などのセンサ類が搭載されている。また,姿勢 ードバックされる観測量は,GPSにより計測された位置, 安定用のASE(Attitude Stability Equipment),位置や対地 速度および慣性測定装置により計測されたロール,ピッ 速度を計測するためのGPS受信機,制御計算コンピュー チ姿勢角である。位置・速度については,指令値と観測 タ,地上基地局との通信用のデータリンクモデムなども 量との偏差量を機体固定座標系に変換したものを制御偏 搭載されている。GPSはリアルタイムキネマティック方 差としており,機体固定軸XB方向の偏差に対してサイク 式のものを採用し,精度は公称値で20 cm,更新周期は リック前後軸を,YB方向の偏差についてサイクリック左 最大で5 Hzである。データリンクモデムは指令や機体の 右軸をそれぞれ制御している。 状態などを通信するための回線(2.4 GHz帯)とディフ ァレンシャルGPS補正情報通信用の回線(400 MHz帯) ここで地球固定座標系から機体固定座標系への座標系 の変換には下式を用いた。 の2回線装備されている。基地局は指令送信や状態監視 を行うためのノートPCやディファレンシャルGPS基地局 xB 受信機,データリンクモデムから構成される。その他, yB = cos Ψ xE cos Ψ -sin Ψ yE sin Ψ (1) エンジン回転数を一定に維持するようスロットルを制御 するエンジン回転数ガバナも搭載されている。またアク チュエータとしてコレクティブ軸(主として上昇・降下 を制御),サイクリック2軸(主として前後・左右の移動 制御),ヨー軸(主として機首方位を制御),スロットル 軸(エンジンスロットルを制御)の合計5軸が搭載され ている。 ここでΨは機首方位(真北を0°とし時計方向に正)で ある。 図3a)においてKpos,Kvel,Kattはそれぞれ位置,速度, 姿勢角についてのゲインである。 制御計算周期は20 Hzで行うが,GPSから出力される 位置・速度の更新周期は5 Hzである。よって,位置・速 度情報については更新されない間をゼロ次ホールドで補 間した。 データ リンク モデム DGPS 補正情報 対地高度計 気圧高度計 GPS受信機 データ リンク モデム 慣性 測定装置 制御計算 コンピュータ コレクティブ軸アクチュエータ 姿勢安定 増強装置 切り替え信号 ラジコン 受信機 サイクリック横軸アクチュエータ サイクリック縦軸アクチュエータ ヨー軸アクチュエータ エンジン 回転センサ 図2 RPM ガバナ スロットル軸アクチュエータ 飛行制御システム 37 036-041_A05.qx 2002.2.21 4:38 PM ページ 38 位置 位置指令 − + 微分 座標 変換 位置 ゲイン + − 座標 変換 + + − 速度 ゲイン ヘリコプタ 姿勢角 姿勢 ゲイン 対地速度 図3a)位置制御系 高度 高度指令 − + 高度 コントローラ ヘリコプタ 方位指令 + − 方位 コントローラ 方位角 図3b)方位・高度制御系 ヨー軸,ヒーブ軸は前年度のシステム同定試験結果よ 15 り求めたモデルにもとづいて図3b)のようなH∞コント 10 ローラを設計し実装した。このうち,高度についてはレ 5 Y(m) 用している。 Start Point ▲ Aim Point ーザ対地高度をフィードバックして制御を行っている。 また方位は慣性測定装置により計測される絶対方位を使 ○ 0 −5 5.飛行試験 − 10 あらかじめ決められた軌跡上を,指定した速度で飛行 するようプログラムした指令情報を機上コンピュータに − 15 −5 0 5 搭載し,飛行試験を行った。位置制御系における各ゲイ ンは実際に飛行させながら調整した。ここでは調整後の, 10 15 20 25 X(m) 図4 横進飛行試験軌跡 主としてサイクリック左右・前後軸による位置制御系の 評価を行うため,横進飛行,前進飛行をそれぞれ実施し, 図5におけるシミュレーションモデルは,前年度の同 制御系の調整・評価を行った。また,円周軌道パターン 定試験より求めたホバリング時におけるピッチ姿勢角に についての試験も行ったので,以下にその結果を示す。 ついての単入力単出力モデルと積分器を組み合わせたモ なお,ここでは軌跡図を地球固定座標系にて表す。 デルを使用した。位置指令に対してはおおむね1 m以内 (1) 横進飛行 の誤差範囲に収まっていることがわかる。しかしロール ここではサイクリック左右軸の制御に関して評価する 姿勢角,速度や制御入力については収束が悪く,シミュ ため,図4に示すように機首方位をほぼ北に向けた状態 レーションの結果との間に開きがある。速度については で,飛行開始地点(0,0)より東方向(XE+方向)に20 m 最大速度時にオーバーシュートが1 m/s出ており,停止後 移動させた。移動速度は最大で2.5 m/sとした。図4にお も,収束性が悪い。図6,7にこの時の高度制御,前後軸 いて矢印は機首方位を示し,破線で囲まれた円内はロー (南北方向)制御の様子を示す。横運動と前後運動およ タ円内であることを示す。図5に東西方向位置,ロール び上下運動が相互に影響し合っていることがわかる。前 姿勢角,東西方向速度およびサイクリック左右軸に対す 後軸とのカップリングの原因のひとつとしては,図4の る入力の実験結果についてシミュレーション結果とあわ 軌跡からわかるように機首方位が指定した移動方向に対 せて示す。 して直交していないことが挙げられる。 38 川田技報 Vol.21 2002 036-041_A05.qx 2002.2.21 4:39 PM ページ 39 (2) 前進飛行パターン ョン結果とあわせて示す。図9においてシミュレーショ ここではサイクリック前後軸の制御に関して評価する ン結果に現れるオーバーシュートは,実験結果では現れ ため,図8に示すような軌跡を飛行させた。ここでは飛 ていないことがわかる。また,制御偏差についても,2 m 行開始地点(0,0)より北方向(YE+方向)に30 m移動 以内に収まっていることがわかる。速度についてはシミ させた。移動速度は最大で4.0 m/sとした。図9に南北方 ュレーション結果ほどのオーバーシュートはなく,収束 向位置,ピッチ姿勢角,南北方向速度およびサイクリッ が良い。図10,11に高度制御および左右軸制御につい ク前後軸に対する入力の実験結果についてシミュレーシ て示す。前述した横進飛行時の結果と同様,左右軸の収 20 10 指令値 0 20 15 10 40 50 60 70 5 0 −5 − 10 0 10 20 30 40 50 60 70 6 4 指令値 実験結果 シミュレーション結果 2 0 −2 10 0.5 0 − 0.5 −1 − 1.5 −2 − 2.5 −3 シミュレーション結果 実験結果 0 20 1 制御入力(V) 30 ピッチ姿勢角(deg) 10 30 40 50 60 70 南北方向速度(m/s) 東西方向速度(m/s) ロール姿勢角(deg) 0 南北方向位置(m) 実験結果 30 0 10 20 30 40 50 60 70 0 10 20 30 40 50 60 70 0 10 20 30 40 50 60 70 0 10 20 30 40 50 60 70 1 0 −1 −2 −3 −4 −5 0.6 0.4 0.2 0 − 0.2 − 0.4 − 0.6 実験結果 シミュレーション結果 0.5 0 − 0.5 −1 0 10 20 30 40 50 60 70 制御入力(V) 東西方向位置(m) 束性が悪い。 シミュレーション結果 0.4 0.2 0 − 0.2 時間(sec) 図5 時間(sec) 横進飛行試験結果とシミュレーション結果の比較 図7 6 4 30 ○ 2 0 制御入力(V) 横進飛行時の前後軸方向の運動 8 0.6 0.4 0.2 0 − 0.2 − 0.4 − 0.6 − 0.8 Start Point ▲ Aim Point 0 10 20 30 40 50 60 70 Y(m) 対地高度(m) 10 20 10 0 0 10 20 30 40 50 60 70 −20 −10 0 図6 横進飛行試験時の高度制御結果 10 20 X(m) 時間(sec) 図8 前進飛行試験軌跡 39 036-041_A05.qx 2002.2.21 4:39 PM ページ 40 20 実験結果 10 20 30 15 50 60 シミュレーション結果 実験結果 10 40 5 0 −5 − 10 0 10 20 6 30 40 50 60 シミュレーション結果 指令値 4 実験結果 2 0 −2 0 10 20 30 40 50 60 シミュレーション結果 3 2 実験結果 1 東西方向速度(m/s) ピッチ姿勢角(deg) 南北方向速度(m/s) 10 ロール姿勢角(deg) 0 0 制御入力(V) 東西方向位置(m) 指令値 30 0 −1 − 0.5 −1 − 1.5 0 10 20 30 40 50 0 10 20 30 40 50 60 0 10 20 30 40 50 60 0 10 20 30 40 50 60 0 10 20 30 40 50 60 4 3 2 1 0 −1 −2 0.6 0.4 0.2 0 − 0.2 − 0.4 0.2 0 − 0.2 − 0.4 −2 −3 0 0.4 制御入力(V) 南北方向位置(m) シミュレーション結果 60 時間(sec) 時間(sec) 図11 前進飛行試験時の左右軸方向の制御結果 図9 前進飛行試験結果とシミュレーション結果の比較 指定軌跡 30 10.5 ② 飛行軌跡 10 20 9.5 9 0 10 20 30 40 50 60 Y(m) 対地高度(m) 11 10 ① 制御入力(V) 0.6 ③ 0.4 0.2 0 0 ④ − 0.2 − 0.4 − 0.6 0 0 10 20 30 40 50 20 30 X(m) 時間(sec) 図10 10 60 図12 円周軌跡飛行試験 前進飛行試験時の高度制御結果 の正方形に内接する円上を3周したのち(図中②,③) (3) 円周パターン 飛行開始地点である(0,0)に帰還するよう(図中④) ここでは円周を描くような飛行軌跡を設定し飛行試験 軌跡を指定した。また飛行中は高度を一定に保ち機首方 を行った。円周飛行は位置指令のほかに方位指令も組み 位は進行方向を向くように位置指令と同期した方位指令 合わせた飛行になる。図12では指定軌跡と実際に飛行し を与えて制御した。このときの速度,高度,方位を図13 た軌跡を示す。(0,0)より北上し(図中①)30 m四方 に示す。 40 川田技報 Vol.21 2002 前後軸方向速度(m/s) 036-041_A05.qx 2002.2.21 4:39 PM ページ 41 6.まとめ 3 2 ここではRoboCopterの位置制御系の設計・試験・調整 1 の結果を示した。指定された軌跡上を位置精度2 m程度 0 で飛行することができたが,とくに左右方向の速度安定 −1 左右軸方向速度(m/s) 0 20 40 60 80 100 120 140 160 ては,より安定な制御系を開発していくとともに,応答 1.5 1 0.5 0 − 0.5 −1 − 1.5 −2 特性の向上を図ることで,より大きな速度を与えた飛行 試験を行っていく予定である。 参考文献 0 20 40 60 80 100 120 140 160 対地高度(m) 1)宮森,中村,鈴木,足立,橋本,瀬川:大型産業用 無人ヘリコプタの自律飛行に関する研究,第38回飛行機 18 シンポジウム講演集,pp.105-108,2000. 17.5 17 2) S.Hashimoto, T.Ogawa, S.Adachi, A.Tan and 16.5 16 G.Miyamori:System Identification Experiments on a Large- 15.5 Scale Unmanned Helicopter for Autonomous Flight,Proc.of 15 0 20 40 60 80 100 120 140 160 IEEE International Conference on Control Applications (CCA2000),pp.850-855,2000. 1000 機首方位(deg) 性に改善の余地があるものと思われる。今後の課題とし 800 600 400 200 0 − 200 0 20 40 60 80 100 120 140 160 時間(sec) 図13 速度・高度・機首方位 この図において速度は機体固定軸のXB成分とYB成分に 分けて示す。前後軸方向の速度は指定速度2 m/sにほぼ一 定に保持されている。一方,左右軸方向の速度には試験 開始初期において大きな乱れがあるが,円周軌道に乗っ た後は,横滑りもほとんどないことがわかる。ただし, 前後軸に比較して振動が持続するような状態であったと いえる。高度については,一定周期(50 sec程度)で上 下に±1 m程度の幅で振動していることがわかる。また, 方位は円周飛行中は指定した方位に対して偏差なく追従 していたことがわかる。軌跡のずれは最大で2 mである が,図より東側の円弧軌跡において決まったずれがある ことがわかる。この原因は主として東からの一定風によ る外乱であると考えられる。 41
© Copyright 2026 Paperzz