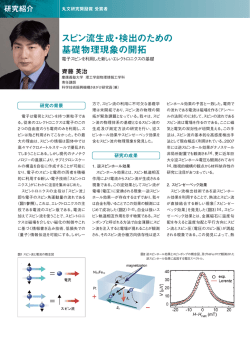
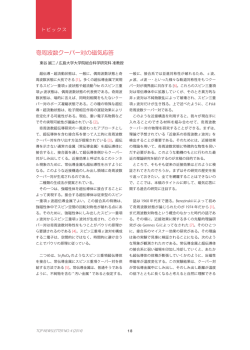
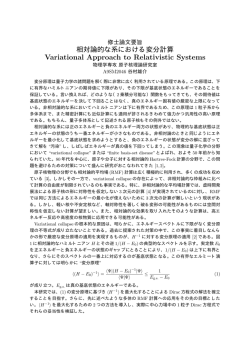
修士論文 集光レーザー場を用いた メソスケール非平衡系の創出 原田崇広 京都大学大学院理学研究科 物理学・宇宙物理学専攻 化学物理・生命物理 吉川研究室 2003 年 1 月 30 日 目次 第 1 章 序論 1.1 研究背景 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2 本論文の構成 . . . . . . . . . . . . . . . . . . . . . . . . . 1 1 3 第 2 章 光学的熱ラチェットにおける増幅された揺らぎと応答の関係 2.1 はじめに . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2 実験系について . . . . . . . . . . . . . . . . . . . . . . . . 2.2.1 使用した実験装置 . . . . . . . . . . . . . . . . . . . 2.2.2 ビーム走査の方法について . . . . . . . . . . . . . . 2.2.3 光学ポテンシャルのデザイン . . . . . . . . . . . . 2.2.4 ポテンシャルを揺する . . . . . . . . . . . . . . . . 2.2.5 測定方法 . . . . . . . . . . . . . . . . . . . . . . . . 2.3 実験結果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.3.1 実験系の特性 . . . . . . . . . . . . . . . . . . . . . 2.3.2 ポテンシャルを揺すった場合 . . . . . . . . . . . . 2.3.3 温度の効果 . . . . . . . . . . . . . . . . . . . . . . 2.3.4 電気的負荷をかけた場合の振舞い . . . . . . . . . . 2.3.5 流体力学的負荷をかけた場合の振舞い . . . . . . . 2.3.6 揺らぎと応答係数の関係 . . . . . . . . . . . . . . . 2.4 数値シミュレーション . . . . . . . . . . . . . . . . . . . . 2.4.1 モデルについて . . . . . . . . . . . . . . . . . . . . 2.4.2 計算結果 . . . . . . . . . . . . . . . . . . . . . . . . 2.5 考察 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.5.1 揺らぎと応答:実験結果の解釈 . . . . . . . . . . . 2.5.2 他のラチェットモデルの場合 . . . . . . . . . . . . . 2.5.3 理論的考察 . . . . . . . . . . . . . . . . . . . . . . 2.5.4 生物物理学的意義 . . . . . . . . . . . . . . . . . . . 2.6 結論と展望 . . . . . . . . . . . . . . . . . . . . . . . . . . 7 7 9 9 10 13 15 17 17 17 21 21 27 28 30 33 34 36 45 45 46 48 50 52 1 第3章 光学トラップ場におけるリン脂質チューブ揺動運動の数理モ デル はじめに . . . . . . . . . . . . . . . . . . . . . . . . . . . . 実験系について . . . . . . . . . . . . . . . . . . . . . . . . 結果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 数理モデルの構成 . . . . . . . . . . . . . . . . . . . . . . . 結論と展望 . . . . . . . . . . . . . . . . . . . . . . . . . . 56 56 57 58 58 68 第4章 4.1 4.2 4.3 4.4 4.5 4.6 4.7 光学モーターの運動モードスイッチング はじめに . . . . . . . . . . . . . . . . . . . 実験系について . . . . . . . . . . . . . . . 結果 . . . . . . . . . . . . . . . . . . . . . 理論的解析 . . . . . . . . . . . . . . . . . 考察 . . . . . . . . . . . . . . . . . . . . . 結論と展望 . . . . . . . . . . . . . . . . . 付録 散乱と粘性抵抗のモーメントの計算 4.7.1 らせん型誘電体の配置 . . . . . . . 4.7.2 散乱力の計算 . . . . . . . . . . . . 4.7.3 粘性抵抗力の計算 . . . . . . . . . . 4.7.4 入射光強度と回転各速度の関係 . . 72 72 73 74 76 80 81 84 84 84 85 86 第5章 まとめと今後の展望 3.1 3.2 3.3 3.4 3.5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88 2 概要 生命の活動、特に細胞内の現象を考えようとする時に重要になるのは nm から µm、msec から sec、数 kB T から数百 kB T という時空間・エネルギースケールだろう。生命現象 の本質を非線形・非平衡過程として捉えようとする立場からは、こうしたスケールの非 平衡系の特性を理解することが極めて重要である。しかし従来の非線形・非平衡系の研 究は専らよりマクロな系について行われてきており、上述したスケールにおける非平衡 開放系の研究はこれから重要な研究テーマとなると考えられる。 ところで集光レ−ザー光線によって微小誘電体をトラップする技術は光ピンセットと して実用化されているが、そこでは集光レーザーは専ら静的なポテンシャル場を作るた めだけに利用されている。しかし光の散乱や溶媒を局所的に加熱する効果などを考えれ ば、集光レーザーは決して静的なポテンシャル場を作るだけではなく、系にエネルギー を供給する手段として利用できることが分かる。つまりサブ µm から µm サイズの誘電 体を非接触に拘束し、同時にエネルギーの流入出を維持することができる集光レーザー 場は、小さなスケールの非平衡系を研究するために優れたツールを提供してくれるので ある。 本論文では以上のような観点から、集光レーザー場を用いて構築したいくつかの µm スケールの非平衡系について論じる。 まず集光レーザーを用いた熱ラチェット系の構築について述べる。集光したレーザー 光線のビームウェストを高速走査することによって、光学ポテンシャル場のプロファイ ルをデザインすることができる。この方法を用いて、非対称なノコギリ歯形の周期ポテ ンシャルを形成し、トラップした微小粒子のブラウン運動を解析した。その結果粒子の 運動は、熱平衡条件下では等方的であるが、ポテンシャルを周期的に揺すった場合には 特定の方向へ進む確率が増えていることが分かった。さらにこの系において、粒子に外 力を及ぼしたときの応答と、粒子の運動の揺らぎの関係を解析し、粒子の移動度と拡散 係数が比例するという結果を得た。この結果から、揺動散逸定理が非平衡定常状態にあ る熱ラチェット系においても成立している可能性について議論する。 次に集光レーザー場上でのリン脂質チューブの自発的揺動運動について述べる。µm サイズのリン脂質のチューブ状構造物を、二本に分裂した近赤外レーザー光線によりト ラップすると、チューブが二本のビームの間を往復運動するという現象が見いだされた。 この振動現象は近赤外レーザーが溶媒である水に吸収されることにより起こる局所加熱 によってチューブが異方的に膨張し、光学トラッピングを不安定化することによって生 じていると考えられる。この考えに基づいて、現象を再現することのできる最も簡単な モデルの構成を述べる。 最後に集光レーザーによって駆動される光学モーターの運動制御について述べる。集 光したレーザー光線を µm サイズの誘電体物質に照射するとき、物体には引力的なト ラップ力と共に光の散乱による散乱力がはたらく。この時、物体の形状に左右性(カイ ラリティ)があると、トラップされた微小物体が散乱力によって特定の方向に回転する ことがある。本章では、同一の形状をした物体であっても、物体内で集光点の位置を変 えることによって、その回転方向を制御することができるということを、らせん形をし た微小誘電体(アフリカツメガエル精子染色体)を用いた実験により明らかにする。ま た物体が回転するメカニズムとその方向を制御する方法について理論的に考察する。 第 1 章 序論 生命システムに出会えばそれが生命システムであると認めることはで きるが、それがなんであるかを語ることはできないという事実を受け入れ ざるをえなかった。生命システムの特徴として、再生産、遺伝、成長、被 刺激性などを数え挙げることはできるが、このリストはどれほどの長さ が必要で、いつになれば完成するのだろうか。リストの完成を知るために は、生命システムとは何かを知る必要があるが、それはそもそもこのリス トを作成することによって答えようとした問いなのである。 − H. R. マトゥラーナ [1] 1.1 研究背景 生命とは何か?生きている状態とは生きていない状態と何が違うのか? この問いについては有史以来、数多くの人々がそれぞれに思索を巡ら し、様々な観点から意見が出されてきた。その観点とは宗教であり、哲 学であり、文学であり、また科学であったが、このように我々の存在の根 幹に関わる重要な問題についてある特定の立場から決定的な解答が出さ れるということはあり得ないから、これは当然であろう。 いっぽう物理学は 16 世紀におけるその成立以後、物質存在の基礎を理 解するための唯一の客観的手段として飛躍的な発展を遂げてきたが、で は物理学は上の問いに対してどのように取り組んできただろうか?生命 に関わる物理サイドからの取り組みとしてまず始めに挙げるべきなのは N. Bohr、M. Delbruck に始まる生物物理学の流れであろう。ここでその すべてを review することは到底できないが、生命の物質的基盤を要素還 元的に徹底的に調べあげるという方法論は、今日のゲノム、プロテオー ムプロジェクトに至るまで大きな成果を上げてきている。また今後もそ の重要性は変わるところはないであろう。しかし一方、こうした要素還元 主義では捉えきれない生命の側面に着目し、非平衡開放系として生命を 捉えようとする立場がある。E. Schrödinger は一見生命が、熱力学第二法 則に従って熱的な死へと向かうのを回避しているように見えるのは、負 のエントロピーを食べているからであると指摘した [2]。また I. Prigogine 1 は、系が熱平衡から遠く離れた場合には熱力学的状態の他に自発的な時 空間構造を持つ新しい状態が生まれることを指摘し、それを平衡状態に おける構造とは区別するために散逸構造と名付けた [3]。Prigogine は化学 反応等の単純な物理系に留まらず、細胞、生態系、社会など広範な系を視 野に入れた議論を展開し、後の非線形・非平衡系研究の多彩な展開に繋 がっている。このように生命現象を非線形・非平衡過程として捉えようと する立場から行われている研究には心臓の拍動 [4, 5]、概日性周期 [6, 7]、 遺伝子発現の制御 [8, 9]、形態形成 [10, 11]、神経発火 [12] や脳の情報処 理 [13] など挙げだしたらきりがない。 ところで、生命の活動、特に細胞内の現象を考えようとする時に重要 になるのは nm から µm、msec から sec、数 kB T から数百 kB T というメソ スコピックな時空間・エネルギースケールだろう1 。生命現象の本質を非 線形・非平衡過程として捉えようとする立場からは、こうしたスケール の非平衡系の特性を理解することが極めて重要である。ところが従来の 非線形・非平衡系の研究はもっぱらよりマクロな系について行われてき ており、メソスケールにおける実験はほとんど例がない。しかし例えば、 非線形非平衡の実験系として最もポピュラーな Belousov-Zhabotinsky 反 応では系の小スケール化に伴って定性的に異なった振舞いが現れること が明らかにされるなどしており [14]、メソスコピックな非平衡開放系の研 究はこれから重要な研究テーマとなると考えられる。 近年のナノテクノロジーの発展に伴い、上記スケールの系を直接扱う ための実験手段が色々提供されてきているが、その中でも集光レ−ザー 光線によって微小誘電体をトラップする技術は光ピンセットとして実用化 され、様々な研究に用いられている。例えば DNA やタンパク等の生体高 分子の折り畳み構造を調べる [15, 16]、生体分子モーターの力学的挙動を 単分子観測する [17, 18]、コロイド間にはたらく引力を測定する [19]、あ るいはメソスケールにおけるエントロピー生成を測定する [20] などであ る。そこでは集光レーザーは専ら静的なポテンシャル場を作るためだけに 利用されているが、しかし光の散乱や溶媒を局所的に加熱する効果など を考えれば、集光レーザーは決して静的なポテンシャル場を作るだけで はなく、系にエネルギーを供給する手段として利用できることが分かる [21, 22, 23, 24]。サブ µm から µm サイズの誘電体を非接触に拘束し、同 時にエネルギーの流入出を維持することができる集光レーザー場は、小 1 メソスコピックという言葉は二種類の文脈で使われる。一方は量子効果が効いてく るような巨視系という意味であり、もう一方は古典的であっても揺らぎの効果が大きく 効いてくるような微視系という意味である [27]。ここでは後者の意味で用いている。 2 さなスケールの非平衡系を研究するために優れたツールを提供してくれ るのである。 本論文では以上のような観点から、集光レーザー場が形成する µm ス ケールの非平衡系についてのいくつかの実験的、理論的研究について述 べる。 1.2 本論文の構成 本論文は大きく分けて3つの部分から成る。 まず第 2 章では集光レーザーを用いた熱ラチェット系の構築について述 べる。集光したレーザー光線のビームウェストを高速走査することによっ て、光学ポテンシャル場のプロファイルをデザインすることができる。こ の方法を用いて、非対称なノコギリ歯形の周期ポテンシャルを形成し、ト ラップした微小粒子のブラウン運動を解析した。その結果粒子の運動は、 熱平衡条件下では等方的であるが、ポテンシャルを周期的に揺すった場 合には特定の方向へ進む確率が増えていることが分かった。さらにこの 系において、粒子に外力を及ぼしたときの応答と、粒子の運動の揺らぎ の関係を解析し、粒子の移動度と拡散係数が比例するという結果を得た。 また Langevin 方程式による数値計算によっても以上の結果を再現するこ とができた。この結果から、揺動散逸定理が非平衡定常状態にある熱ラ チェット系においても成立している可能性について議論する。 次に第 3 章においては、集光レーザー場上でのリン脂質チューブの自発 的揺動運動について述べる [25]。µm サイズのリン脂質のチューブ状構造 物を、二本に分裂した近赤外レーザー光線によりトラップすると、チュー ブが二本のビームの間を往復運動するという現象が見いだされた。この 振動現象は近赤外レーザーが溶媒である水に吸収されることにより起こ る局所加熱によってチューブが異方的に膨張し、光学トラッピングを不 安定化することによって生じていると考えられる。この考えに基づいて、 現象を再現することのできる最も簡単なモデルの構成を述べる。 次に第 4 章で集光レーザーによって駆動される光学モーターの運動制 御について述べる [26]。集光したレーザー光線を µm サイズの誘電体物質 に照射するとき、物体には引力的なトラップ力と共に光の散乱による散 乱力がはたらく。この時、物体の形状に左右性(カイラリティ)がある と、トラップされた微小物体が散乱力によって特定の方向に回転するこ とがある。本章では、同一の形状をした物体であっても、物体内で集光 3 点の位置を変えることによって、その回転方向を制御することができる ということを、らせん形をした微小誘電体(アフリカツメガエル精子染 色体)を用いた実験により明らかにする。また物体が回転するメカニズ ムとその方向を制御する方法について理論的に考察する。 最後に第 5 章において以上の研究のまとめを与え、今後の展望につい て述べる。 4 関連図書 [1] H. R. マトゥラーナ, F. J. ウ゛ァレラ, オートポイエーシス−生命シ ステムとはなにか 河本英夫 訳 (国文社, 1991). [2] E. シュレーディンガー, 生命とは何か−物理的に見た生細胞−, 岡小 天, 鎮目恭夫 訳 (岩波新書, 1951). [3] G. Nicolis and I. Prigogine, Self-Organization in Nonequilibrium Systems (John Wiley & Sons, New York, 1977). [4] Y. Soen, N. Cohen, D. Lipson, and E. Braun, Phys. Rev. Lett. 82, 3556 (1999). [5] Theory of Heart, edited by L. Glass, P. Hunter, and A. McCulloch (Springer-Verlag, New York, 1990). [6] D. Whitmore, N. S. Foulkes, and P. Sassone-Corsi, Nature 404, 87 (2000). [7] A. Goldbetter, Biochemical Oscillations and Cellular Rhythms (Cambridge University Press, 1996). [8] M. B. Elowitz and S. Leibler, Nature 403, 335 (2000). [9] H.Hirata, S.Yoshiura, T.Ohtsuka, Y.Bessho, T.Harada, K.Yoshikawa, and R.Kageyama, Science 298, 840 (2002). [10] A. Turing, M. Phil. Trans. R. Soc. B 237, 37 (1952). [11] S. Kondo and R. Asai, Nature 376, 765 (1995). [12] A. L. Hodgkin and A. F. Huxley, J. Physiol. 117, 500 (1952). [13] The Handbook of Brain Theory and Neural Networks, edited by M. A. Arbib (MIT Press, 2003). 5 [14] R. Aihara and K. Yoshikawa, J. Phys. Chem. A 105, 8445 (2001). [15] C. Bustamante, J. F. Marko, E. D. Siggia, and S. Smith, Science 265, 1599 (1994). [16] M. S. Z. Kellermayer, S. B. Smith, H. L. Granzier, and C. Bustamante, Science 276, 1112 (1997). [17] 柳田敏雄, 生体分子モーター (岩波書店, 2002). [18] K. Svoboda, C. F. Schmidt, B. J. Schnapp, and S. M. Block, Nature 365, 721 (1993). [19] J. C. Crocker, J. A. Matteo, A. D. Cinsmore, and A. G. Yodh, Phys. Rev. Lett. 82, 4532 (1999). [20] G. M. Wang, E. M. Sevick, E. Mittag, D. J. Searles, and D. J. Evans, Phys. Rev. Lett. 89, 050601 (2002). [21] H. Mayama, S. M. Nomura, H. Oana, and K. Yoshikawa, Chem. Phys. Lett. 330, 361 (2000). [22] N. Magome, H. Katahata, M. Ichikawa, S. -i. M. Nomura, and K. Yoshikawa, Phys. Rev. E 65, 045202 (2002). [23] M. Ishikawa, H. Misawa, N. Kitamura, R. Fujisawa, and H. Masuhara, Bull. Chem. Soc. Jpn. 69 59 (1996). [24] S. Juodkazis, N. Mukai, R. Wakaki, A. Yamaguchi, S. Matsuo, and H. Misawa, Nature 408, 178 (2000). [25] S. -i. M. Nomura, T. Harada, and K. Yoshikawa, Phys. Rev. Lett. 88, 093903 (2002). [26] T. Harada and K. Yoshikawa, Appl. Phys. Lett. 81, 4850 (2002). [27] 川崎恭治, 非平衡と相転移−メソスケールの統計物理学− (朝倉書店, 2000). 6 第 2 章 光学的熱ラチェットにおけ る増幅された揺らぎと応 答の関係 どうぞまああなた御自身の天のことを考えてごらんなさい。あなたの 宮殿を支えている両極は煙り立っております。あの両極が焼け落ちれば、 宮殿はつぶれなければなりません。アトラスはもう弱って、やっと持ちこ たえているのでございます。 −ギリシャ神話 [1] 2.1 はじめに 生細胞が活動している nm∼µm スケールの常温水溶液環境は非常に大 きな揺らぎに支配された世界である。コロイド粒子のブラウン運動 [2] は このスケールになって初めて顕在化してくる現象であり、かつてはそれ が生命の本質であると考えられた時代もあった。そして現代では実際に、 遺伝子発現 [3] やイオンチャネルの開閉 [4] に伴う膜電位の揺らぎ [5]、そ して分子機械の動作など、本質的に揺らぎに支配された現象が生命の活 動に重要な役割を果たしていることが分かってきている。特に生体分子 モーターについては、筋肉の研究を含めると既に 100 年以上の歴史があ りさまざまな研究が行われてきたが、その動作原理は未だによく分かっ ていない。そしてかつては決定論的であると思われていた分子モーター の動作が実は非常に大きな揺らぎの中で行われていることが近年の研究 で明らかになってきた [6, 7]。 こうした研究の流れと相まって熱ラチェットと呼ばれる一群のモデルが 近年良く研究されてきている [8]。熱ラチェットとは 1. 大きな熱揺らぎに晒された物体が、 2. 空間的に非対称性な条件(ポテンシャル)下に置かれ、 7 3. 特定の方向性を持たないエネルギー(仕事)を入力された時に、 4. 空間的に特定の方向に移動する確率が増える メカニズムであると特徴付けられる。研究の歴史を遡ると、Curie による 対称性の議論にその原型を見ることができるが [9]、より直接的な形とし ては Feynmann が彼の講義の中で熱力学第二法則を説明するために使用 した爪車の思考実験が有名である [10]。Feynmann 以降しばらく顧みられ ることはなかったが、生体分子モーターと関連づけた Magnasco の仕事 [11] 以降多くの物理学者から関心が持たれ、以来数多くの論文が発表され ている。 これまで行われてきた研究は、様々なバリエーションの熱ラチェットモ デルについて、発生する確率流はどのような向きと大きさを持つかとい うものが殆どである [12]。周期的な力 [11]、ポテンシャルの変形 [13]、有 色ノイズ [14, 15]、温度勾配 [16]、化学反応 [17] 等が検討され、いずれの 場合にも駆動力は対称であっても系に有限の確率流が生じることが確認 されている。実験的にも微小流路 [18]、光ピンセット [19]、微小電極 [20] などを用いて実現されているが、これらは全て文献 [13] で扱われているよ うなポテンシャルの変形を利用している(flashing ratchet と呼ばれる)。 また熱ラチェットをエンジンとして見た場合、その効率を求めるためのエ ネルギー論なども展開されてきている [21, 22]。 このようにこれまでの研究では平均の確率流に関する議論に重点が置 かれており、系の運動の揺らぎに関する議論はまだ十分に行われていな い。しかし生体分子モーターがわれわれの興味を惹き付けるのは、それ が大きな揺らぎの中でもなおちゃんと作動していると言う点であり、生 物がこのように大きな揺らぎをわざわざ利用しているのは何故かという 疑問があるからである。 こうした点に着目し、われわれは走査型ピンセットと微小ポリスチレ ンビーズを用いて実際に熱ラチェットを構築し、駆動力としてラチェット 全体を揺すった場合の粒子の運動の揺らぎと系の力学的特性との関係を 調べた。その結果今回構築した熱ラチェット系において、一定の確率流が 存在するような非平衡定常状態においても、熱揺らぎと力学的応答との 間に一対一の比例関係が成立することを見いだした。また有限の温度で 確率流が最大になる確立共鳴現象が起こることも観測した。 本論文ではこうした一連の実験について述べ、また確率微分方程式を 用いた Monte-Carlo シミュレーションによって実験結果を再現できること 8 を示す。さらに揺動散逸定理との関係について考え、非平衡な熱ラチェッ ト系において揺動散逸定理が成立している可能性について議論する。 2.2 実験系について 2.2.1 使用した実験装置 実験には自作の走査型光ピンセットシステムを使用した。光学系の概略 を図 2.1 に示す。Nd3+ : YAG レーザー(Millennia IR, cw in TEM00 mode, 波長 1064nm, Spectra Physics)を倍率 2 倍のガリレオ式ビームエキスパ ンダー(焦点距離-50mm と 100mm)を経て φ3mm とした後、2次元音 響光学回折器(2DS-50-30-1.06, Brimrose)に導入し、その一次回折光を 倍率 2 倍のケプラー式テレスコープ(焦点距離 120mm と 250mm)を経 て、倒立型落射蛍光顕微鏡(TE-300, Nikon)に導入し、油浸対物レンズ (Nikon Plan Fluor, 100×, Numerical Aparture 1.30)を用いて集光した。 AOD の駆動には純正のドライバー(Acousto Optic Driver, Brimrose)を 使用し、波形発生装置(1946, NF Electronic Instruments)を用いて駆動 信号を入力した。 試料は直径 200nm のカルボキシル基修飾−蛍光ポリスチレンビーズ (Fluorspheres, Molecular Probes)を体積比 2 × 10−6 : 1 で溶媒(H2 O 或 は 1×TAE 緩衝液)中に分散したものを使用した。サンプルは 2 枚のカ バーガラス(30 × 40 × 0.17mm3 と 24 × 24 × 0.17mm3 , Matsunami)間 に環状に切り抜いた両面テープ(NW-15, ニチバン)をスペーサーとして 挟み、その中に 5µl の試料を入れ、周りをマニキュアで覆った(図 2.1 参 照)。このプレパレーション方法によって試料の蒸発等に伴う対流をほぼ 完全に抑えることができる。 サンプルの温度は特に断らない限り室温(21±1◦ C)に保って実験した。 ただし 2.3.3 節で述べる実験では自作の顕微鏡用熱浴と循環恒温槽(Multi Temp III, Pharmacia Biotech)を用いて温度を管理した。 ビーズの電気泳動には顕微鏡上型電気泳動槽(オーダーメイド、日本 エイドー製作)と電源装置(Bipolar Power Supply 4010, NF Electronic Instruments)を用いた。また 2.3.5 節と 2.3.6 節の実験ではビーズに流体力 学的負荷をかけるために、上記サンプルは自動 XY ステージ(BIOS-201T, シグマ光機)上に設置した。 使用した蛍光ポリスチレンビーズは紫外励起すると青色の蛍光を発す 9 る。ビーズの運動は落射蛍光顕微鏡に取り付けた SIT カメラ(浜松ホト ニクス)により撮影し、ビデオレコーダ(WVD-9000, Sony)で記録した 後、画像解析(Cosmos, LIBRARY)した。またレーザー光強度は顕微鏡 入射直前においてレーザー光強度計(1z01500, OPHIR)により測定した。 2.2.2 ビーム走査の方法について 強く集光されたレーザー光線が微小誘電体に及ぼす光学ポテンシャル は、通常ビームウエストの位置を中心とするガウス型のプロファイルで 近似される [23]。これに対しビームを高速で走査することにより、微小誘 電体に及ぼす光学ポテンシャルのプロファイルをデザインすることがで きる(2.2.3 節参照)。そのために、ここでは顕微鏡の焦点面上でビーム ウェストの位置を高速で操作する方法について述べる。 ビームの偏向には音響光学回折器(AOD)を使用した。AOD は光学結 晶(TiO2 )に超音波をかけて定在波を発生させ、その疎密波を回折格子 として利用することにより、Brag 回折によって入射光を偏向させる。こ の時、結晶にかける超音波の波長を変化させることによって偏向角を変化 させることができるため、ガルバノメータースキャナ等の機械駆動型の ビーム偏向装置に比べて高速でビームを偏向することが可能である。今 回実験に使用した AOD ではアクセス時間(最大振れ角(約 50mrad:今 回の光学系では顕微鏡焦点面上で約 40µm)だけ動かすのに要する時間) は約 10µsec である。この偏向速度は今回の実験に十分である。 AOD で偏向したビームを対物レンズの焦点面上で走査するために図 2.2 に示すようなビーム移送系を構築した [24]。使用した対物レンズは無限遠 補正光学対物レンズであり、対物レンズの後方焦点にガウシアンビーム のビームウェストが一致するようにビームを入射すると、焦点面上に次 のビームウェストをつくることができる。さらに同後方焦点を中心とし てビームを偏向することによって、焦点面上でビームウェストを走査す ることが可能になる。そのためには AOD の位置にビームウェストを持っ て来ておき、そこから2枚の共役レンズ系によってビームウェストを対 物レンズの後方焦点に移せばよい [25]。これにより AOD でビームを偏向 すると対物レンズの後方焦点を中心としてビームを偏向でき、対物レン ズの焦点面上でビームを走査することができる。 10 sample 5µL sealing slide glass cover glass spacer PREPARATION L STAGE OBJ L M Nd:YAG LASER L AOD DM DM L Marcury Lamp M WAVE GENERATOR Monitor SIT CAMERA M VIDEO RECORDER 図 2.1: 使用した実験装置の概略図とサンプルプレパレーション法。OBJ、 DM、M、L はそれぞれ対物レンズ、ダイクロイックミラー、ミラー、レ ンズを表す。レーザーから出射したレーザー光線はビームエキスパンダー で拡げられ、音響光学回折器 (AOD) で回折された後、リレーレンズ系を 経て対物レンズに入射し、集光される。サンプルは落射蛍光顕微鏡で蛍 光観察する。顕微鏡に取り付けた SIT カメラで撮像し、ビデオで録画し た後、画像解析する。またサンプルは厳重にシーリングすることによっ て、溶液の対流を防ぐ。 11 φ6 L L φ3 AOD DM f=250 f=120 図 2.2: ビーム走査のための光学系の構築。対物レンズの後焦点と AOD の中心の位置が2枚の球面凸レンズ系によって共役になるように配置さ れている。これにより AOD でビームを振ると、対物レンズの後焦点を中 心にしてビームを振ることができ、対物レンズの焦点面上でビームウェ ストを動かすことができる。 12 2.2.3 光学ポテンシャルのデザイン 上述の光学系を用いてレーザー光線のビームウェストを対物レンズ焦 点面上で走査した。そこでポリスチレンビーズをトラップすると、レー ザー光の入射強度とビームウェストの走査速度に応じて、次のように異 なる振舞いをすることが知られている [26]。まず、走査速度が遅い場合に はビーズはビームウェストの走査にほぼ追随して動く。ところがビーム ウェストの走査速度が、走査方向へのトラップ力の大きさとビーズが周 囲の溶媒から受ける Stokes 抵抗力の釣り合いで決定される閾値以上に速 くなると、ビーズはビームウェストの走査に追随することができなくな り、トラップから離脱してしまう。しかしビームウェストが周期軌道に 沿って走査されている場合にはトラップから離脱したビーズがブラウン 運動によって遠くへ逃げてしまう前に、再びビームウェストがやって来 てトラップされる場合がある。この時ビーズは光学トラップへの捕捉・脱 離を繰り返しながら、走査軌道方向には揺さぶられ、走査軌道と垂直な 方向にはトラップされているという状態になる。そして更に走査速度が 速くなると、ビーズはビームウェストの動きを殆ど感じなくなり、ただ 走査軌道に沿って連続なポテンシャルがあるかのように振舞う。言い換 えるとビーズは走査軌道に一次元的に補足され、軌道方向には自由にブ ラウン運動するという状態になる。 一般に、ビーズが光の波長に比べて小さい時(Rayleigh 領域)には、 ビーズが感じるポテンシャルはレーザー場の強度 I(x, t) と次のように関 係づけられる [23]。 I(x, t) V (2.1) U(x, t) = −χ 2c ここで χ、V 、c はそれぞれビーズの溶媒に対する比誘電率、体積、そし て光速である。そのためビームウェストが高速で走査されている場合に は、ビーズはビームウェストの動きを平均した光強度分布に比例するポ テンシャルを感じて運動することになる。このポテンシャル U(x) は、走 査するビームウェストの位置を X(t) として、 U(x)dx ∝ dt = (Ẋ)−1 · dx (2.2) と表される。このことから、軌道に沿ってビームウェストの走査速度を 変化させることで、軌道上の平均光強度に変化をつけることができ、様々 なポテンシャルプロファイルを形成することが可能になる。そこで今、次 13 式に示すような分布の周期的な光学ポテンシャル(図 2.3)を形成するこ とを考える。 2U0 U0 (x mod L) (2.3) U(x) = x+ 3x0 3 U U0 U0/3 0 L x 図 2.3: ノコギリ歯形周期ポテンシャルのデザイン。 まず一周期分について考えると、式 (2.2) と式 (2.3) を X について解 いて、 t (2.4) X(t) = L( 1 + 8 − 1) τ を得る。ここで L はポテンシャルの周期、τ は1周期分走査するのに要す る時間である。つまり式 (2.4) に従ってビームを直線的に走査すれば、図 2.3 のようなポテンシャルプロファイルを形成することができる。図 2.3 のプロファイルを数周期分並べるには単純に式 (2.4) を繰り返して走査す れば良い。 また、実際にはビームウェストを直線軌道に沿って往復で走査するた め、行きは式 (2.4) に従って、帰りは式 (2.4) を X(τ − t) と置き換えたも ので走査する。このようにビームウェストを往復で走査することは、単 にビームウェストを一筆描きで走査するためだけでなく、 (十分高速で走 14 査しているとは言え)ビーズがビームウェストの走査に追随してドリフ トが起こってしまうことを防ぐために必要である。 実験には、以上の方法によって次表に示す二つの条件で、ノコギリ歯 形周期ポテンシャルをデザインして用いた。 表 2.1: 実験で用いた光学ポテンシャルの条件 ラチェット数 1 周期の長さ 走査周波数 入射光強度 (µm) (Hz) (W) A B 12 18 2.5 2.5 300 300 0.8 0.8 ここで用いた入射光強度と走査周波数の条件下では、ビーズはビーム ウェストの走査に追随することなく、あるポテンシャル中を一次元的に ブラウン運動することが確かめられた(2.3.1 節参照)。この時ビーズの ブラウン運動を解析することにより、実際に形成されたポテンシャルは 図 2.4 のようになっていることが分かった。図 2.3 のデザインに比べて形 がなまっているのは、AOD の偏向速度の限界とレーザー光の回折限界の 効果であると考えられる。 2.2.4 ポテンシャルを揺する 2.2.3 節で述べたポテンシャルプロファイルは、AOD による走査の起点 を動かすことによって全体的に並進運動させることができる。今回の実 験では、ノコギリ歯形周期ポテンシャル中にトラップされたビーズに周 期的外力を加えるために、ポテンシャル全体を正弦波で走査軌道方向に 揺すった1(図 2.5)。ポテンシャルを揺する振幅を変化させ、周波数は実 験全体を通じて 10Hz に固定した。この周波数は、ポテンシャルを形成す るためのビームウェストの走査周波数 300Hz よりも十分小さいので、揺 することによってポテンシャルの形状が乱れることはないと判断した。 1 正確には、揺すっている時点で “ポテンシャル” ではないのだが、以下でも便宜上 “ ポテンシャル” という言葉を使う。“光強度分布” と読みかえていただくと良い。 15 U (arb.unit) 0.0 0.5 1.0 1.5 2.0 2.5 x (µm) 図 2.4: 実際に形成されたノコギリ歯形ポテンシャル。φ200nm の蛍光ポ リスチレンビーズのブラウン運動を追跡し、存在位置の確率分布 P (x) か ら U(x) ∝ − log P (x) によってポテンシャルを計算した。横軸は位置、縦 軸はポテンシャルの相対的な大きさを表す。 16 U(x, t) = U(x - A sin ωt) A sin ωt 図 2.5: ポテンシャルを揺する方法の模式図。ビームウェストを高速走査 して描いた光学ポテンシャル全体を正弦波で平行に揺する。 2.2.5 測定方法 今回の実験ではポテンシャル場中におけるポリスチレンビーズの運動 の統計的性質を調べるために、次のような方法で測定を行った(図 2.6)。 1. まず、点トラップによって1個のビーズをトラップする。 2. ある時刻(t = 0 sec)にビームウェストの走査を開始し、その位置 を中心としてノコギリ歯形周期ポテンシャルを形成する。 3. 一定時間後(一部を除き t = 2 sec)にビーズが何周期目のラチェッ トに移動したかを計測する(途中でビーズがトラップから離脱して しまった場合はカウントしない)。 4. 以上の測定を多数のビーズ(≥ 100)について行う。 2.3 2.3.1 実験結果 実験系の特性 まず上述したノコギリ歯形ポテンシャル上におけるビーズの運動につ いて述べる。ここからの実験には表 (2.2.3) の条件 A を用いている。また ビーズは H2 O 中に分散させた。 17 t<0 t = 0 sec -4 -3 -2 -1 0 1 2 3 4 t = 2 sec -4 -3 -2 -1 0 1 2 3 4 図 2.6: ポテンシャル中のビーズ運動の測定方法。最初にビーズを点トラッ プしておき、ある瞬間からビームウェストの走査を開始する。それから 2 秒経った後のビーズの位置を(ポテンシャルの周期単位で)計測する。 この測定を多数のビーズについて繰り返す。 18 ノコギリ歯形ポテンシャル上のビーズはビームウェストの走査方向に 1次元的に拘束されてブラウン運動する。この時ビーズは主にポテンシャ ルの谷底付近に滞在しているが、時折、そこを逃れて隣の谷に跳び移っ ていく様子が観測された。図 2.7 にいくつかのビーズの軌道の時系列を 示す。 12.5 10.0 7.5 x (µm) 5.0 2.5 0.0 -2.5 -5.0 -7.5 -10.0 -12.5 0 1 2 t (sec) 3 4 図 2.7: ノコギリ歯形ポテンシャルにトラップされたビーズの運動の例。 横軸にビームウェストの走査を始めてからの時間、縦軸に変位を示す。ま たポテンシャルの谷のおおまかな位置を点線で示す。 ひとつ一つのビーズの軌道は図 2.7 に示すようにランダムであるが、 2.2.5 節で述べたようにして、多数の粒子について一定時間後の変位のヒ ストグラムを取ると、図 2.8 に示すようにガウス型の分布になる。この時 分布の中心は、ほぼ中央のラチェットに一致する2 。ポテンシャルを揺すっ 2 厳密に言うと AOD の特性や、光学系のミラー・レンズ等の配向によって走査領域 内にビーム強度のムラができてしまうため、分布の中心がずれる場合がある。そのため、 分布の中心が中央のラチェットに一致するように光学系を調整し、その条件を固定して 以下の実験を行っている。 19 Freqency 40 30 20 10 0 -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 x (steps) 図 2.8: 周期ポテンシャルの中心から出発したビーズの 2 秒後の変位分布。 横軸には移動したステップ数をとった。 20 ていない条件下では、系は熱平衡状態にあると考えられるので3 、この結 果は妥当である。この条件で実験系の調整はうまく行っていると判断し、 以下の実験に進んだ。 2.3.2 ポテンシャルを揺すった場合 次にポテンシャルを揺すった場合について述べる。2.2.4 節で述べた方 法により、ノコギリ歯形ポテンシャル場を走査方向に沿って周期的に揺 すった場合のビーズの運動を観測した。1次元的に拘束されたビーズの 運動は図 2.9 に示すように、ひとつ一つに関してはやはりランダムである が、多数のビーズの変位分布をとると、図 2.10 に示すように、その平均 位置が中央のラチェットよりずれることが分かった。 図 2.11 にポテンシャルを揺する振幅を変えていった時の、各場合にお けるビーズの変位分布を示す。この図から分かるように、どの場合も分 布はガウス型で近似することができるが、その平均位置と分布の幅は振 幅に依存して変化している。 ここで分布の平均位置をビーズを走らせた時間(2sec)で割ったものを 平均移動速度として定義する。 x(t) (2.5) t この時、振幅に対する平均移動速度の変化は図 2.12 のようになる。その 結果、振幅が小さいときは平均移動速度は殆ど 0 であるが、振幅が大き くなってくると平均移動速度が有限の正の値を持ってくる。そして振幅 がもっと大きくなり、ポテンシャルの周期に近くなってくると平均移動 速度は再び減少することが分かった。 またグラフからポテンシャルを揺すっている場合には、平衡状態に比 べて分布の分散が大きくなっていることが分かる。 v= 2.3.3 温度の効果 次にポテンシャルを揺すった状態での平均移動速度と系の温度との関 係について調べた。本実験は熱浴を倒立顕微鏡ステージ上のサンプルに 3 勿論使用している近赤外レーザー光によって溶媒である H2 O が局所的に加熱され る効果があり、そうした非平衡性が効いてくる現象もあるが [27]、今回の実験条件下に おいて温度感受性の蛍光色素で温度上昇を見積もった結果、ビームウェスト付近に著し い温度上昇は認められなかった。 21 12.5 10.0 7.5 x (µm) 5.0 2.5 0.0 -2.5 -5.0 -7.5 -10.0 -12.5 0 1 2 t (sec) 3 4 図 2.9: ノコギリ歯形ポテンシャルを揺すった場合のビーズの運動の例。 横軸にビームウェストの走査を始めてからの時間、縦軸に変位を示す。ま た揺すっていない状態でのポテンシャルの谷の位置を点線で示す。揺す る振幅はポテンシャル周期の 0.36 倍、周波数は 10Hz である。 22 25 Freqency 20 15 10 5 0 -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 x (steps) 図 2.10: ポテンシャルを揺すった場合の、中心から出発して 2 秒後のビー ズの位置の分布。横軸は移動したステップ数を表す。揺する振幅はポテ ンシャル周期の 0.36 倍、周波数は 10Hz である。 23 50 40 50 A=0.00 40 30 30 20 20 10 10 0 40 0 A=0.10 40 30 30 20 20 10 10 0 Freqency 40 A=0.36 A=0.40 0 A=0.20 A=0.50 40 30 30 20 20 10 10 0 A=0.26 0 A=0.60 40 40 30 30 20 20 10 10 0 0 A=0.30 40 -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 x (steps) 30 20 10 0 -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 x (steps) 図 2.11: 各振幅に対する、中心から出発して 2 秒後のビーズの位置の分 布。横軸にはビーズが移動したステップ数を表し、各分布図の左肩には ポテンシャルを揺する振幅を示す。 24 <v> (steps / sec) 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0.0 -0.1 0.0 0.1 0.2 0.3 0.4 0.5 0.6 A (1/L) 図 2.12: ポテンシャルを揺する振幅に対するビーズの平均速度のプロッ ト。横軸にポテンシャルの周期を単位とする振幅の大きさ、縦軸に平均 移動速度を示す。 25 直接載せ、サンプルの裏側に熱電対を当てて温度をモニターしながら行っ た。2.3.2 節において最大の移動速度を示した条件(振幅:ポテンシャル 周期の 0.36 倍)に条件を固定し、温度コントローラを用いて温度を変化 させた場合の平均移動速度を調べた結果を図 2.13 に示す。図から分かる ように、室温(21 ± 1 ℃)での実験に比べて、5 ± 1 ℃の低温や、41 ± 1 ℃の高温では平均移動速度が低下することが示された。また、高温にな るほど分散が大きくなっていることも分かる。 <v> (steps / sec) 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0.0 0 5 10 15 20 25 30 35 40 45 T (oC) 図 2.13: ポテンシャルを揺すった状態における平均移動速度と温度の関 係。横軸に温度、縦軸に平均移動速度を示す。ポテンシャルを揺する振 幅はポテンシャル周期の 0.36 倍、周波数は 10Hz に固定している。 26 2.3.4 電気的負荷をかけた場合の振舞い 前節まではノコギリ歯形周期ポテンシャル上にビーズをトラップして、 ポテンシャルを周期的に揺すった場合、ビーズのブラウン運動に方向性が 現れて一方向に進む確率が高くなるということを見た。ではこの時ビー ズを一方向に動かしている力の大きさはどの程度か、あるいは一方向に 進むビーズはどの程度の仕事をすることができるかという疑問が湧いて くる。それに答えるため、ビーズの平均的な移動方向とは逆向きに一定 の外力を加えた場合のビーズの平均移動速度の変化を調べた。ビーズに 加える外力として、まず初めに静電気力を選んだ。一連の実験で使用し ているビーズは表面がカルボキシル基修飾されているため、水溶液環境 中では負に帯電している。そのため外から一様な電場をかけることによ り、ブラウン運動しているビーズに一様な大きさの外力を加えることが できる。これを利用して、ビーズの平均移動方向とは逆向きの電場をか けた時のビーズの平均移動速度の応答を調べた。 図 2.14 に実験装置の概略を示す。ノコギリ歯形ポテンシャルと平行に 電場をかけることができるよう、電極が配置してあり、直流電源装置を 用いて電極間に定電圧をかけた。電極間の距離は約 4.0cm である。本実 験ではビーズを分散させる溶媒として、これまで用いていた超純水の代 わりに 1×TAE 緩衝液を用いた。 ポテンシャルを揺する条件は振幅をラチェット間隔の 0.36 倍に固定し た。またサンプルプレパレーションにはガラスを用いているため、定電 圧をかけた場合に電気浸透流の効果 [28] が無視できないが、全ての測定 をガラス面直上の同じ位置で行っているため、電気浸透流の大きさも揃っ ていると考えられる。 図 2.15 に実験結果を示すが、外から加えた電圧に対して平均移動速度 がほぼ線形に減少するという結果が得られた。即ち、大きな外力をかけ るとビーズは外力と同じ向きに流されるが、外力がある有限の値におい てビーズの平均移動速度が 0 になり(ストール状態)、それよりも小さな 外力に対してはビーズは外力に逆らって移動することが分かった。また、 かかっている静電気力の大きさに平均移動速度を掛けたものが仕事率に なるが、このグラフから仕事率は電場の二次の関数になり、ある電場の 大きさにおいて最大値をとることが分かる。 27 DC VOLTAGE - - - - - - 図 2.14: 顕微鏡上型電気泳動装置の模式図。 2.3.5 流体力学的負荷をかけた場合の振舞い 2.3.4 節において、小さな電場に対してはビーズは静電気力に逆らって 動くことができることが示された。言い換えると、本系は光学的なエネ ルギーを静電気的なエネルギーに変換する微小機械であると見なすこと ができる。 この系の力学的特性を考えようとすると、外力に対する系の応答をよ り詳細に調べる必要がある。しかし 2.3.4 節の実験系では、緩衝液の電解 に伴い、ビーズに及ぼされる外力の大きさが経時的に変化したり、発熱 による熱対流が発生したりするため、長時間安定に実験することができ ない。また電気浸透流などの不確定要素もあることとから、実験を数多 く行って統計的データを得る際に支障がある。そこでこの困難を解決す るために、ビーズに及ぼす負荷を電気的なものから流体力学的なものへ と変更した。 光学ポテンシャルとビーズの系(実験室系)に対して周囲の溶媒を一定 速度で流すことにより、トラップされているビーズには溶媒による Stokes 抵抗力を及ぼすことができる4 。この方法では実験系が安定しているとい 4 この場合には負荷に逆らって移動してもビーズのした仕事は全て周りの溶媒に散逸 28 <v> (steps / sec) 0.6 0.4 0.2 0.0 -0.2 -0.4 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 E (V / cm) 図 2.15: 電気的な負荷に対する平均移動速度の変化。横軸はかけた電場 の強さ、縦軸は平均移動速度を表す。ポテンシャルは周期の 0.36 倍の振 幅、10Hz の周波数で揺すっている。 29 う点に加え、ビーズにかかる力の大きさの見積りが容易であるという利 点もある。溶媒の粘性率を η 、ビーズの半径を a、溶媒の流速を vL とす る時、Stokes 抵抗力の大きさは FL = 6πηavL で与えられる。実験では光 学系を固定し、サンプルプレパレーションを顕微鏡のステージごと一定 速度で動かすことでビーズに流体力学的負荷をかけた。この実験では溶 媒を再び H2 O に戻した。 図 2.16 に、ポテンシャルを揺する振幅がラチェット間隔の 0.40 倍の場 合の、溶媒の速度とビーズの平均移動速度の関係を示す。この場合にも 電気的負荷の場合と同様、周りの溶媒の速度に対して平均移動速度が線 形に減少するという結果を得た。 2.3.6 揺らぎと応答係数の関係 2.3.2 節で指摘した通り、ポテンシャルを揺すった状態の変位分布も平 衡状態(振幅 0)と同様ガウス分布をしているが、その分布の幅は平衡状 態と比較して増大している。この分布の幅から粒子の実効的な拡散係数 は次のようにして定義される。 D= [x(t) − vt − x(0)]2 2t (2.6) ここで v は式 (2.5) で定義される平均移動速度、t はビーズを走らせた時 間(2sec)である。つまり実効的な拡散係数が、平衡状態に比べて増大し ていると言える。 そこで、この効果と流体力学的負荷に対する粒子の応答との関係を調 べた。実験ではポテンシャルを揺する振幅をラチェット間隔の 0、0.20、 0.26、0.40 倍にした4つの場合について、2.3.5 節で述べた方法により、流 体力学的負荷をかけていった時のビーズの変位分布を調べた。ここでは より詳細に分布の幅の議論をするためにラチェットの数を増やし、空間を より広く取った(表 (2.2.3) の条件 B)。その結果、各場合について図 2.17 に示すような結果を得た。 図 2.17 の各直線の傾きから、外力に対する粒子の応答係数(移動度) が次式のように定義される。 ∂v µ= ∂FL A (2.7) されてしまうので、熱力学的な仕事をしているとは言えないが、ここからは外力に対す る系の力学的応答に着目したいので、その点は問題にしない。 30 FL (fN) 0.0 1.9 3.8 5.7 7.5 9.4 11.3 13.2 15.1 0.0 0.2 0.4 0.6 0.8 1.0 <v> (steps / sec) 1.0 0.8 0.6 0.4 0.2 0.0 -0.2 -0.4 -0.6 1.2 1.4 1.6 VL (µm/sec) 図 2.16: 流体力学的負荷に対する平均移動速度の変化。横軸は溶媒を動 かす速度、縦軸は平均移動速度を表す。また、Stokes の公式から見積もっ た流体力学的負荷の大きさを上に示す。ポテンシャルは周期の 0.40 倍の 振幅、10Hz の周波数で揺すっている。 31 FL (fN) 0.0 4.7 9.4 18.8 A=0.00 0.4 <v> (steps / sec) 14.1 0.0 9.4 0.2 0.0 0.0 -0.2 -0.2 -0.4 -0.4 14.1 18.8 A=0.26 0.4 0.2 -0.6 4.7 -0.6 0.0 0.5 1.0 1.5 2.0 0.0 4.7 9.4 14.1 18.8 A=0.20 0.4 0.2 0.0 0.0 -0.2 -0.2 -0.4 -0.4 -0.6 -0.6 0.5 1.0 1.5 2.0 0.5 1.0 1.5 2.0 0.0 4.7 9.4 14.1 18.8 A=0.40 0.4 0.2 0.0 0.0 0.0 0.5 1.0 1.5 2.0 VL (µm/sec) 図 2.17: 各振幅における、流体力学的負荷に対する平均移動速度の応答。 横軸は溶媒を動かす速度と Stokes 抵抗力、縦軸は平均移動速度を表す。 また各グラフの右肩にはポテンシャル周期を単位とした、揺すりの振幅 を示す。周波数は 10Hz である。 32 そこで各振幅における移動度と、負荷がない状態での実効的な拡散係数 との関係をプロットした結果を図 2.18 に示す。すると振り幅が大きくな るにつれて実効的な拡散係数が大きくなり、それに伴ってビーズの移動 度も増大するという結果を得た。そして両者の関係は図に示すようにほ ぼ線形であることが分かった。 0.30 µ( µm / sec fN ) 0.25 0.20 0.15 0.10 0.05 0.00 2.0 2.2 2.4 2.6 2 2.8 3.0 3.2 3.4 D (µm / sec) 図 2.18: 揺すられたノコギリ歯形ポテンシャル中を運動するビーズの拡 散係数と移動度の関係。図 2.17 の実験結果から、各振幅において、負荷 を掛けていない状態での拡散係数と、負荷をかけた時の移動度の関係を プロットした。横軸に拡散係数、縦軸に移動度を示す。 2.4 数値シミュレーション 本節では、2.3 節で示した実験結果を数値シミュレーションによって再現 することを試みる。2.3 節の実験はビーズをひとつ一つ数える実験であっ たため、時間・体力等の都合により見ることのできるサンプル数に限界が あるが、そこで得られた実験結果を再現できるようなモデルを構築できれ 33 ば、その点を補ってより詳しい解析が可能になる。このような考えのもと、 ビーズの運動を過減衰 Langevin 方程式(あるいは等価な Fokker-Planck 方程式)によってモデル化し、数値的な解析を行った。 2.4.1 モデルについて 水溶液中で集光レーザー場にトラップされたビーズ等の微小誘電体の 運動は、次のような Langevin 方程式、 (x,t) γ ẋ = − ∂U∂x − FL + ξ(t), ξ(t) = 0, ξ(t)ξ(t) = 2Mδ(t − t ) (2.8) あるいは等価な Fokker-Planck 方程式 ∂ ∂ 1 P (x, t) = ∂t ∂x γ ∂U(x, t) ∂ P (x, t) + FL + M ∂x ∂x (2.9) によって記述できると考えられる。ここでパラメータ γ 、M はそれぞれ微 小誘電体の粘性係数と熱揺動力の大きさであり、FL は光学ポテンシャル 以外の外力、ξ(t) は白色ガウスノイズである。また U(x, t) は微小誘電体と 集光レーザー光の相互作用として発生する光学ポテンシャルである。これ は以下のように正当化できる。実験では水溶液中に分散した半径 100nm のビーズを用いた。このビーズの質量は m = 4.2 × 10−15 g、粘性係数は γ = 1.9 × 10−6 g/sec であるので緩和時間は m/γ = 2.2 × 10−9 sec となる。 一方我々はせいぜい数十 msec のオーダーの運動を問題にしているので慣 性の効果はほとんど効いてこない。したがってビーズの運動は過減衰の Langevin 方程式 (2.8) もしくは等価な Smoluchowski 方程式 (2.9) で記述 できるとしてよい。 通常の光ピンセットでは U(x, t) としてガウス型分布を採用するが、今 考えている系ではレーザー光を、ビーズの運動に比べて高速で走査する ことで図 2.4 のようなポテンシャルが形成されている。このポテンシャル プロファイルを簡単に、 U0 − 1−x x (1 − x0 ≤ x ≤ 0) 0 (x mod 1) U(x) = U0 x (0 ≤ x ≤ x0 ) x0 (2.10) と近似した(図 2.19)。ここではポテンシャルの間隔を単位長さにとって ある。 34 U U0 1-x0 O x0 1 図 2.19: シミュレーションに使用したポテンシャルプロファイル。ポテン シャルの周期を単位長さにとった。 35 x また実験では光強度のプロファイルを走査方向に沿って正弦波で揺すっ た。この効果を取り入れるために、ポテンシャル U(x, t) は U(x, t) = U(x − A sin ωt) (2.11) のように時間に依存するとする。A、ω はそれぞれポテンシャルを揺する 振幅と角周波数である。 以下の計算には次のようなパラメータの値を採用した。∆t は数値計算 の時間刻みである。 U0 0.1 表 2.2: 計算に使用した各パラメータ値。 x0 γ M A ω FL ∆t 0.8 1 0 ∼ 0.08 0 ∼ 0.5 0.3 -0.1 ∼ +0.1 10−3 数値計算には Monte-Carlo 法を用いた。原点を初期位置として Langevin 方程式 (2.8) の陽的な積分(105 ステップ)を多数回 (≥ 103 ) 繰り返して、 最終的な粒子位置の分布をとった。Langevin 方程式を解くことで、等価 な Fokker-Planck 方程式 (2.9) を解く場合に問題になる境界条件の影響を なくすことができ、計算時間を短縮することがでる。特に今回はラチェッ ト間隔程度の空間スケールで粗視化した情報を得たいので、103 回程度の 試行によって統計的に安定な結果を得ることができる。 2.4.2 計算結果 上述のモデルによる数値計算の結果を以下に示す。 計算例 図 2.20 に式 (2.8) を積分した場合の粒子の軌道の例をいくつかの場合に ついて示す。パラメータは M = 0.02、FL = 0 に固定した。その結果図 2.7 に示す実験結果とよく似た軌道を再現できることが分かった。またポ テンシャルを振らない条件下(A = 0)で、一定時間後の粒子変位の分布 をとると、正負どちらの方向へ向かう確率も等しくなり、原点(粒子の 初期位置)を中心とするガウス型分布をとることが分かった(図 2.21)。 36 5 4 3 2 x 1 0 -1 -2 -3 -4 -5 0 20000 40000 60000 80000 100000 time steps 図 2.20: 平衡状態においてポテンシャル中をブラウン運動する粒子の軌 跡の例。横軸は時間、縦軸には粒子の変位を示す。 37 Frequency 500 400 300 200 100 0 -10 -8 -6 -4 -2 0 2 4 6 8 10 x (steps) 図 2.21: 平衡状態において原点から出発した粒子の一定時間後(105 ∆t) の変位分布。横軸は粒子の変位を表す。 38 揺すりの効果 式 (2.11) によってポテンシャルを揺すった場合の、ブラウン粒子の変位 分布を図 2.22 に示す。また、粒子の平均移動速度の振幅に対するプロッ トを図 2.23 に示す。この場合も図 2.12 の実験結果を再現しており、ある 振幅で正方向の確率の流れが最大になることが分かった。また振幅が大き くなると分布の幅も大きくなると言う実験の傾向も再現されている。デー タは示さないが、ポテンシャルを揺すっている状態でも分布の幅は時間 の 1/2 乗にスケールすることも確認した。 温度の効果 Langevin 方程式 (2.8) 中のパラメータ M は熱揺らぎの大きさを表して いるが、この値は(第2種)揺動散逸定理によって系の温度と結びつい ている [29] M = γkB T (2.12) ことから、系の温度を変化させることは M の値を変化させることに対応 する。 図 2.24 に M を 0 から 0.08 まで変化させた場合の平均移動速度の変化 を示す。他のパラメータは A = 0.4、FL = 0 に固定した。その結果、あ る有限の温度において平均移動速度が最大値を取るという結果が得られ、 実験で見られた傾向を再現している。ただし、実験で 280K 程度の温度で も平均速度が低下していたのは溶媒である水の物性(273K で凍る)が影 響していると考えられる。 この現象は、ある有限な大きさのノイズが系の振舞いをエンハンスす るという意味で一種の確率共鳴 [30] であると言える。 外力の影響 次にブラウン粒子に一定の大きさの外力をかけた場合の系の振舞いを 見る。実験では外力として静電気力と流体力学的力を与えたが、Langevin 方程式の枠内で定式化する場合には両者は特に区別されずに、定数値の 外力項 FL として現れる。ここで、外力が静電気力の場合には FL = qE − 6πηaveo 、流体力学的力の場合には FL = 6πηav である。q 、E 、η 、a、veo 、 v はそれぞれブラウン粒子の電荷、外部電場、溶媒の粘性率、粒子の半 径、電気浸透流の流速、そして周りの溶媒の流速を表す。 39 600 600 500 A=0.00 500 400 400 300 300 200 200 100 100 0 0 Frequency 500 A=0.10 500 400 400 300 300 200 200 100 100 A=0.20 500 400 400 300 300 200 200 100 100 0 0 500 A=0.50 0 0 500 A=0.40 A=0.60 -10 -8 -6 -4 -2 0 A=0.30 2 4 6 8 10 x (steps) 400 300 200 100 0 -10 -8 -6 -4 -2 0 2 4 6 8 10 x (steps) 図 2.22: 各振幅における、原点から出発した粒子の一定時間後(105 ∆t) の変位分布。横軸は粒子の変位を表し、各分布図の左肩にはポテンシャ ルを揺する振幅を示す。 40 <v> (10-5 steps / ∆t) 2.5 2.0 1.5 1.0 0.5 0.0 0.0 0.1 0.2 0.3 0.4 0.5 0.6 A (1/L) 図 2.23: ブラウン粒子の平均速度とポテンシャルを揺する振幅の関係。横 軸はポテンシャルを揺する振幅、縦軸には平均移動速度を示す。 41 <v> (10-5 steps / ∆t) 3.5 3.0 2.5 2.0 1.5 1.0 0.5 0.0 0.00 0.02 0.04 0.06 0.08 M 図 2.24: ポテンシャルを揺すった状態におけるブラウン粒子の平均速度 と温度の関係。横軸には熱ノイズ強度、縦軸には平均移動速度を示す。ポ テンシャルを揺する振幅は A = 0.4 に固定してある。 42 <v> (10-5 steps / ∆t) 図 2.25 に M = 0.02、A = 0.4 に固定した場合の、外力に対する平均移 動速度の変化を示す。その結果、外力が小さい間は外力に逆らった動き が見られるが、外力の増加とともに平均速度は線形に減少し、ストール 状態(平均移動速度 0)を経て、外力と同じ向きの運動へと転じることが 分かった。この結果は実験で得られている結果を、静電気力と流体力学 的力の両方の場合について再現している。 また変位分布の幅は加える外力の大きさには殆ど依らないことも分か った。 2 1 0 -1 -2 -3 0.00 0.01 0.02 0.03 0.04 FL 図 2.25: 負荷をかけた場合のブラウン粒子の平均速度の変化。横軸には 負荷の大きさ、縦軸には平均移動速度を示す。ポテンシャルを揺する振 幅は A = 0.4 に固定してある。 43 揺らぎと力学的応答の関係 最後にポテンシャルを揺すった場合に見られる実効的な拡散係数の増 加と、外力に対する応答の関係について調べた。温度を M = 0.02 に固定 し、ポテンシャルの振り幅 A を 0 から 0.5 まで変化させて、各場合につい て加える外力の大きさを変化させていく。そして得られた応答直線から 移動度(式 (2.7))を計算し、それと実効的な拡散係数(式 (2.6))との関 係をプロットしたものを図 2.26 に示す。図に示されている通り、拡散係 数と移動度が線形に対応していることが分かった。 1.2 1.0 µ 0.8 0.6 0.4 0.2 0.0 0.00 0.01 0.02 0.03 D 図 2.26: 揺すられたノコギリ歯形ポテンシャル中を運動するビーズの拡 散係数と移動度の関係に関するシミュレーション結果。各振幅において、 負荷をかけていない状態での拡散係数と、負荷をかけた時の移動度の関 係をプロットした。横軸に拡散係数、縦軸に移動度を示す。 44 2.5 2.5.1 考察 揺らぎと応答:実験結果の解釈 2.3 節の実験と 2.4 節の結果をまとめると次のようになる。まず粒子の 平均移動速度は、ラチェットの制御パラメータ A と外力 F に対して、 v(A, F ) = v0 (A) + µ(A)F (2.13) という関係にあることが分かった。但し v0 (A) は外力がない場合の速度、 µ(A) は移動度であり、どちらも A に依存する。また粒子の分布の幅から 実効的な拡散係数は十分大きな t について D(A) = (x(t) − vt − x(0))2 2t (2.14) によって定義され、これも A に依存して変化する。そして移動度と拡散 係数の間に D(A) − D0 = α(µ(A) − µ0 ) (2.15) という比例関係があることが分かった。ここで D0 ≡ D(0)、µ0 ≡ µ(0) は 平衡状態における拡散係数と移動度であり、α は A によらない正定数で ある。 さて、系が平衡状態にある時は拡散係数と移動度の間にはよく知られ た(第1種)揺動散逸定理(Einstein の関係)が成立する [2, 29]。 D0 = µ 0 k B T (2.16) これは粒子がノコギリ歯形の周期ポテンシャル中にある場合でも、D0 と µ0 が十分長時間の平均として定義されていれば、ポテンシャルの形状等 には一切よらずに成立する。 従ってこの関係と実験の結果 (2.15) を併せて D(A) = α(µ(A) − µ0 ) + kB T µ0 = αµ(A) + (kB T − α)µ0 (2.17) となる。ここで仮に µ(A) が 0 であるような状況を考えると、その場合に は粒子の拡散は起こらない筈なので、D(A) も 0 になる。従って式 (2.17) の定数項は 0 で α = kB T となり、結局 D(A) = µ(A)kB T 45 (2.18) を得る(実際に図 2.26 ではそのようになっている)。式 (2.18) は制御パラ メータ A を含んでおり、ポテンシャルを揺すっている非平衡定常状態に おいても成り立つ。式 (2.16) と比較してみると、この関係は揺動散逸定 理の自然な拡張になっていることが分かる。 揺動散逸定理は、揺らぎの大きさが外力に対する応答と等しいことを 示す極めて重要な定理である。平衡状態近傍における線形応答の領域に 関しては久保により一般的に証明され [29]、詳細釣り合いを満たす非平衡 系(例えばレーザー発振)への拡張は Agarwal[31] によって行われた。そ れに対し熱ラチェットのように平衡から遠く離れた系においても揺動散逸 定理が成り立つかについてはこれまで知られていなかったが5 、今回の結 果(式 (2.18))は、非平衡定常状態にある熱ラチェット系においても(少 なくとも今の系では)揺動散逸定理が成立しているということを示唆し ている。 2.5.2 他のラチェットモデルの場合 本論文で扱った、ポテンシャル自体を揺するという方法は熱ラチェット のメカニズムとしてはこれまであまり議論されてこなかった。これは恐 らく解析的な取り扱いの難しさに起因しているのだが、それでは 2.5.1 節 で見たような揺らぎと応答の関係は他の熱ラチェットモデルにおいても成 立しているだろうか?それを見るためにここでは flashing ratchet[13] と 呼ばれているポピュラーなメカニズムについても検証する。 flashing ratchet とは、ブラウン粒子が複数の内部状態をとり、その状 態によって感じる周期ポテンシャル(うち少なくとも1つは非対称)が 変化するというメカニズムである。最も簡単な場合では2状態を用意し、 状態1では平坦なポテンシャル (= 0)、状態2では図 2.19 のような非対 称周期ポテンシャル U(x) を感じて熱揺動の中で運動しているという状況 を考える。ここでは文献 [13] に従い、2状態間をある遷移確率 Ω12 、Ω21 で確率的に遷移するとする。粒子の確率分布に関する Fokker-Planck 方程 式は次のようになる。 ∂ P − ∂t 2 ∂ ∂ 1 P − ∂x FL γ ∂t 1 ∂U (x) ∂ 1 + FL ∂x γ ∂x ∂ + M ∂x P = −Ω12 P1 + Ω21 P2 1 ∂ + M ∂x P2 = +Ω12 P1 − Ω21 P2 (2.19) ここで P1 (x, t) と P2 (x, t) はそれぞれ状態1と2にある粒子の存在確率分布 5 文献 [32] では「成り立たない」と述べられている。 46 を表す。他のパラメータの意味はこれまでと同じである。このモデルでも詳 細釣り合いを破るような Ω12 と Ω21 の条件下(Ω12 /Ω21 = exp(−U(x)/kB T )) では一方向に有限の確率流が生じることが知られている。 そこでこのモデルにおいて 2.4.2 節と同じように、拡散係数と外力に対 する応答を調べた。遷移確率は定数で Ω12 = Ω21 = Ω であるとし、様々 な Ω の値について、外力 FL に対する平均移動速度の応答と、FL = 0 に おける拡散係数との関係を見た。パラメータは 2.4 節で用いたのと同じで ある。結果を図 2.27 に示すが、図の通り拡散係数と移動度が線形に対応 している。従って 2.5.1 節で見たような揺らぎと応答の関係は、今回の実 験系特有のものではないことが分かった。 0.7 0.6 0.5 µ 0.4 0.3 0.2 0.1 0.0 0.000 0.005 0.010 0.015 D 図 2.27: Flashing ratchet モデルにおける拡散係数と移動度の関係。遷移 確率をいろいろ変化させ、負荷をかけていない状態での拡散係数と、負 荷をかけた時の移動度の関係をプロットした。横軸に拡散係数、縦軸に 移動度を示す。 47 2.5.3 理論的考察 これまでの結果は以下のように解釈できる。まず、揺らぎと応答に関 する式 (2.18) の関係は、ラチェットのメカニズムの詳細にはあまり依存し ないと考えられる。従って、ある程度系を粗視化した現象論的なモデルを 出発点にとって考えるべきである。元々の系は Fokker-Planck 方程式(式 (2.9) 或は式 (2.19))で記述されるものであるが、ポテンシャルの周期 L と、その長さの拡散時間 L2 /D0 よりも十分大きなスケールで系を粗視化し て眺めた場合、粗視化された確率分布 P は実効的な速度 v(A, F ) と拡散係 数 D(A) をもって伝播するガウス型の波束のように振舞うことが実験から 分かる。従って粗視化された確率分布は次の粗視化された Smoluchowski 方程式に従うと考えられる6 。 ∂ ∂ ∂ P(x, t) = −µ(A)(F0 (A) + F ) + D(A) P(x, t) ∂t ∂x ∂x (2.20) ここで、v0 (A) = µ(A)F0 (A) と書き直した。−F0 (A) はラチェットの確率の 流れを 0 にするような外力の大きさ(stopping force)に等しい。式 (2.19) で外力のない場合については、v0 (A)、D0 (A) が摂動計算によって元の方 程式から求められている [33](これを式 (2.9) の場合に明示的にやるのは 難しい)。 このように粗視化した後、v0 (A) や µ(A)、D(A) 等の項の物理的な意味 をいったん忘れて式 (2.20) の数理的な構造に着目する。するとこの方程 式は potential 条件を満たすことが知られているので [34]、熱力学的極限 (境界 ±∞)では詳細釣り合いを満たす定常解 Pst = Ne µ(F0 +F ) x D (2.21) を持つ。平衡状態で µF0 = 0 の場合にはこれは明らかに Boltzmann 分布 F x に一致し、Peq = Ne kB T となる。ここでその類推で、µF0 = 0 であって も Boltzmann 分布 PB = Ne F0 +F kB T x (2.22) が成り立つと仮定すると、直ちに D(A) = µ(A)kB T 6 (2.23) 同様に、粗視化された Kramers 方程式から議論を始めることもできるが、その際も 本質的に必要な仮定は同じであり、同じ結論を得ることができる。 48 を得る。 逆に式 (2.23) が成り立っているとすると式 (2.22) の成立が言えるので、 式 (2.23) と式 (2.22) は等価である。つまり熱ラチェット系は詳細釣り合い を著しく破った非平衡系であるが、熱力学極限において十分時間が経っ た後には詳細釣り合いが成立すると仮定すると、実験結果(式 (2.23))か ら、結果として Boltzmann 分布(式 (2.22))が言えるのである。 式 (2.22) が意味するところについてもう少し議論しておく。Einstein の 揺らぎの現象論 [35] によれば、式 (2.22) は系の実効的な熱力学ポテンシャ ルが Φ = −(F0 (A) + F )x (2.24) と書けることを意味している。F0 (A) は保存力ではなく、系の非平衡性に よってエネルギー散逸の結果生じる力であるので、本来このような力は 熱力学ポテンシャルには入らない。それがこのような形で実効的なポテ ンシャルに寄与するのは、系を粗視化したことの帰結である。 物理学において自然を記述する際には、階層性を正しく認識すること が極めて重要である。ミクロからマクロへと至る一番下の階層では、系 の微視的な運動は(古典/量子)Liouville 方程式によって記述される。こ れをうまく縮約することによって Langevin 方程式で記述されるメソスコ ピックな階層へと上がれることは森によって示された [29]。普通はここ から更に上がることによって巨視的な変数で記述される階層(平衡/非 平衡熱力学)へと到達するが、今扱っている熱ラチェット系ではこの間 にもう一つの階層−粗視化した Smoluchowski 方程式 (2.20) が成立する階 層−が存在する。そして Langevin 方程式の階層では熱力学ポテンシャル が存在せず、系は平衡から遠く離れているように見えるが、粗視化した Smoluchowski 方程式の階層ではこの非平衡性が一見消えてしまい、平衡 系と類似した取り扱いによって揺動散逸定理が成立することが分かる。 ここから実効的な熱力学ポテンシャルに “非平衡力”F0 (A) が寄与する ことは次のようにして解釈できる。まず初めに実験で負荷を与えるため に用いた Stokes 抵抗力について考えてみよう。微視的な Liouville 方程式 はガリレオ変換に対して不変であるが、粗視化した結果 Langevin 方程式 や Fokker-Planck 方程式はガリレオ変換に対して不変でなくなっている。 そのため実験室系以外の慣性系から系を眺めると新しい力(Stokes 力)が 生じるように見え、この力は Hamiltonian で書けるような保存力と区別 がつかない。これは溶媒分子の運動を粗視化した結果である。これと同 様にして、Langevin 方程式の階層では “非平衡力” のようなものはポテン 49 シャルの形に書くことはできないが、粗視化した Smoluchowski 方程式の 階層に上がって見ると “非平衡力”F0 (A) は、またも Hamiltonian で書け るような保存力と区別がつかなくなり、熱力学ポテンシャルに含まれて しまうのである。 2.5.4 生物物理学的意義 2.1 節で見たとおり、熱ラチェットは揺らぎの大きな非平衡系における エネルギー変換の特性という物理的なコンテクストでの研究の他に、生 体分子モーターのモデルとしても考えられてきている。この背景には、ア クチン−ミオシン系、マイクロチューブル−キネシン・ダイニン系など の生体分子モーターの1分子観察の実験が進み、分子モーターの動作が 非常に確率的であると分かって来たことがある [36, 6, 7]。そこで、熱ラ チェット系を生体分子モーターのモデルとして捉えた場合に、本論文で示 したような揺らぎと応答の関係が生物物理学的に何を意味するかについ て論じる。ここでは筋肉収縮の機構となっているアクチンーミオシン系 について考えよう。 日常生活において手で物を持ち、一定の高さに支えておくと手が疲れ てエネルギーを使うことはよく経験する(図 2.28)。物の高さは殆ど変化 していないのだから手は物に仕事をしていないのにエネルギーが使われ ているのは何故であろうか。 一般に、熱ラチェット系を熱機関と見なし、入力したエネルギーの内力 学的な仕事として使われたエネルギーの割合をその効率として定義する とき、外から加える負荷が小さいときは有限の効率 (> 0) を持つが、ちょ うど平均移動速度が 0 になるような負荷を加えた場合(ストール状態)に はその効率は 0 になる。この時入力したエネルギーは全て熱として散逸 してしまう [21]。 では生物はどうしてそのようなムダをしているのだろうかという疑問 が残るが、それに対する答えが本論文で示した(拡張された)揺動散逸 関係にあるのではないだろうか。つまり、効率の点から言うとストール 状態は非常に無駄であるが、系にエネルギーを注入することによって熱 揺らぎを増幅し、それに伴って外力に対する応答係数を大きくしている のではないだろうか。言い換えると、止まっている状態でもエネルギー を使うというムダと引き換えにして、次に動く時に鋭敏に応答すること ができるという状態を作り出していると言える。このトレードオフの土 50 あ∼ しんど 図 2.28: 天空を支えるアトラス。われわれの筋肉は仕事をせずに物を支 えているだけでもエネルギーを消費する。 51 台となっているのが熱ラチェット系において成立する揺動散逸関係である と考えられる。 2.6 結論と展望 本論文では、集光レーザーを操作することでノコギリ歯形の光学ポテ ンシャルを作って微小な誘電体ビーズをトラップし、ポテンシャルを周 期的に揺すった場合のビーズの振舞いを実験的に調べた。その結果、揺 すり方を大きくするに伴い、ビーズのブラウン運動に方向性が生じるこ とを観測した。また温度を変化させることによって確率共鳴現象を観測 した。さらに外力を加えた場合の応答について調べ、ビーズの拡散係数 と外力に対する応答係数が比例するという関係が成立していることを見 いだした。 さらに、ここで扱った実験系に対応する Langevin 方程式を導き、数値 的に解くことによって実験結果を定性的に再現することができた。 以上の結果は、揺動散逸定理が非平衡定常状態にある熱ラチェット系に おいても成立することを示している。簡単な考察から、揺らぎと応答に ついて成り立つこのような関係は、系をポテンシャル周期に対して十分 粗視化した極限で成立するものであることが分かった。その結果、粗視化 した Smoluchowski 方程式へと縮約することが可能なクラスの熱ラチェッ ト系では普遍的に Einstein の関係(式 (2.23))が成立していることが示 唆される。そのために熱ラチェットのメカニズムに課される条件は何か? また Langevin 方程式に対する森の方法のように、系統的に縮約を行う方 法があるか?という問題は今後に残された課題である。 52 関連図書 [1] T. ブルフィンチ, ギリシア・ローマ神話, 野上弥生子 訳 (岩波書店, 1984). [2] A. Einstein, Investigations on the Theory of the Brownian Motion, edited by R. Fürth, transl. by A. D. Cowper (Dover, 1956). [3] M. B. Elowitz, A. J. Levine, E. D. Siggia, and P. S. Swain, Science 297, 1183 (2002). [4] B. Hille, Ion Channels of Excitable Membranes, Third Edition (Sinauer Associiates, Inc., 2001). [5] F. Buchholtz, N. Schinor, and F. W. Schneider, J. Phys. Chem. B 106, 5086 (2002). [6] 柳田敏雄, 生体分子モーター (岩波書店, 2002). [7] Y.Okada, and N. Hirokawa, Science 283, 1152 (1999). [8] ”Ratchets and Brownian Motors: Basics, Experiments, and Applications”, Appl. Phys. A 75 (August 2002). [9] P. Curie, J. Phys. (Paris) III 3, 343 (1894). [10] R. P. ファインマン, R. B. レイトン, M. サンズ, ファインマン物理 学 II 光 熱 波動, 富山小太郎訳 (岩波書店, 1968). [11] M. O. Magnasco, Phys. Rev. Lett. 71, 1477 (1994). [12] F. J ülicher, A. Ajdari, and J. Prost, Rev. Mod. Phys. 69, 1269 (1997). [13] R. D. Astumian and M. Bier, Phys. Rev. Lett. 72, 1766 (1994). 53 [14] C. R. Doering, W. Horsthemke, and J. Riordan, Phys. Rev. Lett. 72, 2984 (1994). [15] Laura Ibarra-Bracamontes and Victor Romero-Rochin, Phys. Rev. E 56, 4048 (1997). [16] Y. M. Blanter and M. Büttiker, Phys. Rev. Lett. 81, 4040 (1998). [17] M. O. Magnasco, Phys. Rev. Lett. 72, 2656 (1994). [18] J. Rousselet, L. Salome, A. Ajdari, and J. Prost, Nature 370, 446 (1994). [19] L. P. Faucheux, L. S. Bourdieu, P. D. Kaplan, and A. J. Libchaber, Phys. Rev. Lett. 74, 1504 (1995). [20] J. S. Bader, R. W. Hammond, S. A. Henck, M. W. Deem, G. A. McDermott, J. M. Bustillo, J. W. Simpson, G. T. Mulhern, and J. M. Rothberg, Proc. Natl. Acad. Sci. U.S.A. 96, 13165 (1999). [21] K. Sekimoto, J. Phys. Soc. Jpn. 66, 1234 (1997). [22] H. Kamegawa, T. Hondou, and F. Takagi, Phys. Rev. Lett. 80 5251 (1998). [23] T. Tlusty, A. Meler and R. Bar-Ziv, Phys. Rev. Lett. 81, 1738 (1998). [24] K. Svoboda, and S. M. Block, Annu. Rev. Biophys. Struct. 23, 247 (1994). [25] B. E. A. Saleh and M. C. Teich, Fundamentals of Photonics (John Wiley & Sons, inc, 1991). [26] L. P. Faucheux, G. Stolovitsky, and A. Libchaber, Phys. Rev. E. 51, 5239 (1995). [27] S. -i. M. Nomura, T. Harada, and K. Yoshikawa, Phys. Rev. Lett. 88, 093903 (2002). [28] 本田進, 寺部茂 編, キャピラリー電気泳動 (講談社サイエンティフィ ク, 1995). 54 [29] 戸田盛和, 久保亮五 編, 岩波講座:現代物理学の基礎6−統計物理学 (岩波書店, 1972). [30] L. Gammaitoni, P. Hänggi, P. Jung, and F. Marchesoni, Rev. Mod. Phys. 70, 223 (1998). [31] G. S. Agarwal, Z. Physik 252, 25 (1972). [32] 太田隆夫, 非平衡系の物理学 (裳華房, 2000). [33] T. Harms and R. Lipowsky, Phys. Rev. Lett. 79, 2895 (1997). [34] H. Risken, The Fokker-Planck Equation: Methods of Solution and Applications (Springer-Verlag, Berlin, 1989). [35] L. E. Reichl, A Modern Course in Statistical Physics (John Wiley & Sons, Inc., 1998). [36] T.Yanagida, T.Arata, and F.Oosawa, Nature 316, 366 (1985). 55 第 3 章 光学トラップ場における リン脂質チューブ揺動運 動の数理モデル 哲学は私たちの眼前に絶えず広がっている宇宙というこの巨大な書物 の中に書かれている。しかし、この書物は、それが書かれている言葉を理 解し文字を読むことをまず最初に学ばなければ理解され得ないのである。 − G. ガリレイ [1] 3.1 はじめに 生命現象に目を向ければ、そこには多くの振動現象が溢れている。代 表的な例としては心臓の拍動、呼吸、代謝、概日性周期、神経細胞の発 火などがあるだろう。こうした生物振動の多くは単一細胞のレベルにお いて既に見ることができる。 一方、非生物界においても古くから様々な振動現象が知られており、 1970 年代頃から活発になってきた非平衡開放系の研究の対象となって来 た。電気回路、流体、化学反応等はその代表的な例である。ところがこ うした非生物系で知られている非線形振動現象はマクロなスケール(> mm)におけるものが殆どであり、細胞と同程度のスケール(≤ µm)で 起こる非線形振動の例はこれまであまり知られていない。しかし例えば非 線形振動の実験系としてよく研究されてきている Belousov-Zhabotinsky 反応では系の小スケール化に伴って mm 程度のサイズから定性的に異なっ た振舞いが現れることが明らかにされるなどしており [2]、さらに小さな µm 程度のスケールにおける非線形振動の特性を明らかにすることは重要 な課題である。 最近になって我々のグループでは集光したレーザー光線と誘電体物質 との相互作用によって µm スケールにおいて自律的振動現象が起こると 56 いうことを見い出してきている。眞山らはポリエチレングリコールと塩 を含む溶媒中に分散させた長鎖 DNA 分子を近赤外集光レーザー光線に よりトラップすることで、DNA 分子が自律的に凝縮−脱凝縮を繰り返す という現象を発見した [3]。また馬籠らは溶媒中に分散させたサブ µm 径 のラテックスビーズに集光レーザー光線を照射すると多数のビーズが凝 集−発散を繰り返すという現象を発見し、解析している [4]。こうした系 では従来知られている非線形振動の実験系を単純にスケールダウンする だけでは実現することが難しい µm∼サブ µm スケールの非平衡自己組織 化現象を詳細に調べることが可能になるので、µm スケールの非平衡系の 特性を実験的に調べることができ、細胞レベルの生命現象のメカニズム の解明に寄与することができると期待される。本稿では、集光レーザー 光線を用いた µm スケールの非平衡自己組織化現象のもう一つの例であ る、リン脂質チューブの自発的揺動運動について述べる1 。リン脂質は生 体膜を構成する両親媒性分子であり、水溶液中では分子同士が疎水基を 接してミセル、小胞などの構造を形成する。我々はチューブ状の多層膜 小胞をある条件で集光レーザー光線によりトラップすると、チューブが 光軸にそって配向し、さらに光軸のまわりで揺動運動を行なうという現 象を見い出している [5]。本章ではそのメカニズムを考察し、現象を再現 する簡単な数理モデルの構成について述べる。 3.2 実験系について リン脂質チューブは巨大リポソームの調整法である静置水和法 [6] を改 変して得た。egg-yolk PC あるいは dioleoyl-phosphatidylcholine 10mM を 含む CHCl3 /MeOH 溶液を直径1 mm のガラス細管内に入れ、真空中で 6時間乾燥させてガラス管内壁に脂質の薄膜を形成した。その後ガラス 管内に緩衝液(HEPES 10mM, MgCl2 10mM, pH = 7.1)を入れ、室温で 10 分置いた後、内容物をスライドガラス上に押し出した。この方法によ り直径 1 ∼ 3µm の多層膜(ミエリン鞘 [7])のチューブ状構造物を得た。 光学系は Nd3+ : YAG レーザー(SL902T, cw in TEM00 mode, 波長 1064 nm, Spectron)を倒立顕微鏡(TE-300, Nikon)に導入し、対物レ ンズ(Nikon Plan Fluor, 100×, Numerical Aparture 1.30)により集光し て試料に照射した。レーザー光線の空間プロファイルはビームアナライ 1 本章で述べられている実験は全て、共同研究者である野村 M. 慎一郎博士によるも のです。筆者は主に解析とモデル構築・解析を担当しました。 57 ザー(13KP503, Melles Griot KK)で測定した。実験は全て室温 26 ± 1 ℃で行った。脂質チューブの運動は CCD カメラ(CS8210, Tokyo Electric Industry)で撮影しビデオ録画したものを画像解析(Cosmos, LIBRARY) した。 本実験ではビームの空間プロファイルを通常の TEM00 モードより改変 している。対物レンズに入射する前の光線をミラーを使って 2 × 10−5 rad だけ傾けると、対物レンズの特性により光線が図 3.1 に示すように 2 本に 分裂する。この状態で脂質チューブをトラップするとチューブの一端が焦 点に固定され、残りの部分が光線に沿って図 3.1 に示すように配向する。 この条件で実験を行った。 3.3 結果 レーザー光線によりトラップされたリン脂質チューブは、その一端が 焦点に固定され残りの部分は光軸に沿って配向する。配向したリン脂質 チューブは光軸のまわりで図 3.2 に示すような揺動運動を行った。このよ うなチューブの運動において、焦点面に射影したチューブの角度の時系列 を各ビーム強度について図 3.3 に示す。この時系列に見られるようにビー ム強度が大きくなるにつれて揺動運動の周期が短くなり、また乱雑さが 増していることが分かる。平均周波数と入射ビーム強度の関係は図 3.4 に 示すように線形になった。 3.4 数理モデルの構成 リン脂質と集光レーザー光線との電磁相互作用は、µm サイズの誘電体 と光の電磁場との相互作用の問題と考えられる。この種の問題は物体が光 線の波長に比べて非常に小さい場合(Rayleigh 領域)は単一の誘起ダイ ポールと電磁場の相互作用として、逆に物体が波長よりも非常に大きい場 合(Mie 領域)では幾何光学の問題として扱うことができるため、比較的 簡潔に理解できる [8]。今の場合には誘電体の大きさが光の波長(1064nm) と同程度であるため、多数の誘起ダイポールによる散乱光の干渉の効果 が無視でず、厳密な取り扱いが非常に困難になる。それでもビームが非常 に強く集光されていることから Rayleigh 領域に類似した取り扱いが可能 58 図 3.1: 実験で使用した光学系の一部と、トラップされるリン脂質チュー ブの模式図。焦点の上方で測定したレーザー強度の空間プロファイルも 示す。文献 [5] より改変。 59 図 3.2: 揺動運動するリン脂質チューブの明視野顕微鏡像。左上から横向き に1秒毎のスナップショットを示す。ビームは紙面手前側から入射してお り、最左上のコマの矢印の位置に焦点がある。入射ビーム強度は 100mW である。 60 θ (rad) 2.0 2.0 1.5 1.5 1.0 1.0 0.5 0.5 0.0 0.0 -0.5 -0.5 -1.0 -1.0 -1.5 50W -2.0 2.0 0 10 20 30 40 50 60 70 80 90 100 110 120 -1.5 2.0 1.5 1.5 1.0 1.0 0.5 0.5 0.0 0.0 -0.5 -0.5 -1.0 -1.0 -1.5 100W -2.0 0 10 20 30 40 50 150W -2.0 0 10 20 30 40 -1.5 60 190W -2.0 60 50 0 10 20 30 40 50 60 t (sec) y θ x 図 3.3: 焦点面に射影したチューブの配向角の時系列。角度 θ は下の模式 図のように定義し、図 3.2 のような画像について各時刻で θ を計算した。 各グラフの右下に入射光の強度を示す。 61 1.4 1.2 ν (Hz) 1.0 0.8 0.6 0.4 0.2 0.0 40 60 80 100 120 140 160 180 200 P (mW) 図 3.4: チューブ揺動運動の平均周波数と入射ビーム強度の関係。横軸は 入射光強度、縦軸は揺動の周波数を表す。 62 になる [9]。それによると誘電体と集光レーザー光線との相互作用により、 U =− −1 0 I(x, y, z) dV 2c (3.1) というポテンシャルが発生する。ここで と 0 はそれぞれ誘電体と溶媒 の誘電率、c は光速、I(x, y, z) は局所的な光強度で、積分は誘電体の占め る体積全体について行う。今の場合、ビームは図 3.1 のような強度分布を 持っているので I(x, y, z) は、 2((x − tan βz)2 + y 2 ) I(x, y, z) = C(z)P exp − w02 + tan2 ζz 2 2 ((x + tan βz)2 + y 2) + exp − (3.2) w02 + tan2 ζz 2 C(z)−1 = π(w02 + tan2 ζz 2 ) と近似することができる。上式で β は 2 本のビームがそれぞれ光軸とな す角度、ζ はそれぞれのビームの集光角、w0 は焦点における最小ビーム 径を表す。ここでチューブの運動を最も簡単にモデル化するために、連 続的に曲がるチューブの代りに 1ヶ所で折れ曲がることのできる棒を考え る(図 3.5)。 z R φ θ l d0 ρ 図 3.5: 1折点連結剛体棒モデルの模式図。 このモデルでは棒は長さ l、直径 R、端から d0 のところで折れ曲がる ことができる。一端は原点(ビーム焦点に対応)に固定され、z 軸(光軸 63 に対応)に対して θ だけ傾いている。また折点における折れ角を φ とす る。このような棒が式 (3.3) で表されるような光の場の中に置かれた場合 のポテンシャルエネルギーを式 (3.1) から計算することができて、図 3.6 に示すような θ と φ の関数になる。図 3.6 より、θ、φ があまり大きくな いところではこの関数形を簡単に U(θ, φ) = P a 4 θ0 2 θ − θ + bθφ 4 2 (3.3) と近似することができる。 さて、チューブがここで求めたようなポテンシャル中で運動している というだけでは、エネルギーの散逸によってポテンシャルの極小に対応 する配向に落ち着いてしまうので、実験でみられたような振動は起こり 得ない。振動が起こるためにはエネルギーの注入を伴う何らかの非平衡 性が必要になる。 今の系の場合それはレーザー光線が溶媒を局所的に過熱することによ る温度効果であることが以下のようにして分かる。この系で用いている レーザーの波長は 1064nm であるが、これは H2 O の O-H 伸縮振動の 3 倍 波に相当するため、溶媒が光を吸収して加熱される。これに対して D2 O では誘電率などの物性は H2 O と同じであるが、波長 1064nm には吸収が ないためビームにより加熱されない [10]。そこでリン脂質チューブを D2 O 中に分散させ、上と同様の実験をおこなったところチューブの自発的揺 動運動は起こらなかった。従ってチューブの揺動運動には溶媒によるレー ザー光の吸収の効果が効いていることが示唆される。 次に実際に溶媒がどの程度加熱されているのかを Eu-TTA 錯体 [11] を 用いて調べた。Eu-TTA は燐光を発する物質であるが、温度が上昇する とその燐光の強度が落ちるという性質がある。これを利用して、文献 [5] に述べられている方法により Eu-TTA 錯体を埋め込んだジャイアントリ ポソームを調製し、このリポソームをトラップすることで焦点付近の温 度上昇を測定した。測定結果は図 3.7 のようになり、焦点部では約 1µm の範囲で約 10 ℃の温度上昇が認められた。 ここで測定された温度分布を簡単に近似すると、 ρ2 z2 T (ρ, z) = κP exp −2 2 − 2 2 ρ0 z0 + TR となる。さらに、1 折点モデルの折点における温度は、 d2 d2 T (θ) = κP exp −2 20 sin2 θ − 2 20 cos2 θ + TR ρ0 z0 64 (3.4) θ (π rad) U (fJ) -0.4 -0.2 0.2 0.4 θ (π rad) U (fJ) -0.4 -0.2 -0.2 0.2 0.4 -0.2 -0.4 φ=0 rad φ=0.3π rad -0.6 -0.6 -0.8 -0.8 -1 θ (π rad) U (fJ) -0.4 -0.2 0.2 0.4 -0.4 -0.2 -0.4 φ=0.4π rad 0.4 -0.4 -0.6 -0.8 -0.8 θ (π rad) U (fJ) -0.2 0.2 -0.2 -0.6 -0.4 θ (π rad) U (fJ) -0.2 φ=0.1π rad -0.4 0.2 0.4 -0.2 φ=0.2π rad -0.4 -0.6 -0.8 図 3.6: 1接点剛体棒モデルにおいて各折れ角 φ に対する光学ポテンシャ ルの計算結果。各グラフの横軸は配向角 θ、縦軸はポテンシャルエネル ギーを表し、左側に折れ角 φ の値を示す。 65 図 3.7: Eu-TTA 色素法により測定したレーザー光焦点付近での温度プロ ファイル。横軸はビームウェストからの距離、縦軸には燐光強度の減少 を示す。燐光強度の減少は温度上昇に対応する。文献 [5] より引用。 1 d2 1 = κP exp −2 20 exp −2d20 2 − 2 sin2 θ + TR (3.5) z0 ρ0 z0 θ2 κ exp −2 2 + TR (3.6) θ1 と書くことができる。 最後にチューブの弾性の効果を考える。振動現象をモデル化するため には最低 2 次元の力学系が必要である。この系のように、µm スケールの 水溶液環境中で sec の時間スケールの運動が起こっている場合には、慣 性に比べて溶液の粘性の効果が非常に大きいため、運動方程式の慣性項 が落ちる。そのためこのような系で振動が起きるためにはチューブの配 向角 θ の他に最低もう一つ変位の自由度が必要である。実験で見られる チューブの運動には必ずチューブの曲がりが伴っていることから、メモ リーとしての曲がりの効果を簡単な形でモデルに取り入れれば良いと考 えられる。実際に、チューブが曲がることが重要であることを確認する ため、チューブと同じような大きさの微小なガラス棒をトラップする実 験を行った。このガラス棒はリン脂質チューブと同じように光軸に沿っ てトラップされるが、硬いので折れ曲がることはない。結果として、ガ ラス棒は自発的揺動運動を起こさなかったので、チューブが曲がるとい う効果が効いていることが分かる。 66 曲がりが起こる理由としては次のように考えられる。ビームの焦点付 近では図 3.7 のような温度勾配が形成されているので、光軸に沿って配向 しているリン脂質チューブの両側面において温度が異なると考えられる。 そのためチューブの両側面における熱膨張に差が生じ、チューブが曲が るものと考えられる。このことを 1 折点連結剛体棒モデル内で定式化す ると、次のようになる。棒の折点での温度は式 (3.6) で与えられるが、折 点の両側面での温度差は ∆T (θ) = T (θ + ∆θ) − T (θ − ∆θ) (3.7) となる。この温度差により棒が折点で曲がるので、曲がり φ に対する弾 性復元力の平衡点がシフトすることになる。従って棒の曲がりに対する 弾性復元力は、 F (θ, φ) = −χ∆T (θ) − ηP φ (3.8) と書ける。ここで χ はチューブの熱膨張率、η は弾性率である。 以上を総合すると、1 折点モデルに対する発展方程式は (θ,φ) τ1 θ̇ = − ∂U∂θ τ2 φ̇ = − ∂U (θ,φ) + F (θ, φ) ∂φ (3.9) という形式から、 τ1 θ̇ = −P (aθ3 − θ02 θ + bφ) τ2 φ̇ = −P bθ (3.10) (θ+∆θ)2 (θ−∆θ)2 − exp −2 θ2 + ηφ − P χκ exp −2 θ2 1 1 で与えられることになる。 以下で方程式 (3.10) の解の構造を調べる。パラメータがいくつかある が、その値によって相空間の構造は次の 3 つに分けられる。 I. 不動点 3 つ (θ, φ) = (0, 0), (±θA , ±φA )(ただし |θA | > 0)に不動点を 持ち、(0, 0) が鞍点、(±θA , ±φA ) が沈点になる。この場合、解は初 期条件によって (±θA , ±φA ) のどちらかに吸い込まれてしまい振動 は起こらない。 II. 不動点 5 つ (θ, φ) = (0, 0), (±θA , ±φA ), (±θB , ±φB )(|θB | > |θA | > 0)に不動点を持ち、(0, 0) が湧点、(±θA , ±φA ) が鞍点、(±θB , ±φB ) が沈点になる。この場合でも初期条件により (±θB , ±φB ) のどちら かに吸い込まれてしまう。 67 III. 不動点 1 つ (θ, φ) = (0, 0) に不動点があり、不安定渦点になってい る。この場合は外側にリミットサイクル解が存在する。 各場合について適当なパラメータをとり、4 次の Runge-Kutta 法により 積分した結果と、nullcline を含む相空間の様子を図 3.8 に示す。 III のパラメータ領域ではリミットサイクル振動の周期はビーム強度 P に比例する。これは方程式 (3.10) の右辺が P に比例しているため、P を 変化させることは時間スケールを線形に取り直すことに対応するためで ある。 以上の結果を物理的に解釈すると、次のようになる。パラメータ領域 III になるためにはパラメータが次の条件を満たしていれば良い。 ∆θ2 η 2 8χκ ∆θ exp −2 > (3.11) θ +b 2 2 θ1 θ1 b 0 1 (θ1 + ∆θ)2 1 3 2 bθ1 + χκ exp −2 (aθ − θ0 θ1 ) > b 1 η θ12 (θ1 − ∆θ)2 − exp −2 (3.12) θ12 これは一見複雑であるが、∆θ ∝ チューブ径、η ∝ チューブの弾性率、χ ∝ チューブの熱膨張率であるので、これらに着目すると比較的簡潔に解釈 できる。第一式が成立するためにはチューブ径は温度上昇領域の大きさ よりも小さく、チューブが温度効果で曲げられる位柔らかく、熱膨張率が 十分大きい必要がある。また第二式が成立するためにはチューブ径は両 側面で十分な温度差がつく位太く、光との電磁相互作用に抗するだけの 弾性率があり、熱膨張率が十分大きい必要がある。これらの条件が満た されていれば、チューブと光の電磁相互作用のポテンシャルが局所的な 温度効果によって不安定化され、振動が起こると解釈することができる。 3.5 結論と展望 本稿では集光レーザー光線を使って非平衡開放条件をつくり出し、µm スケールの非平衡現象を起こすことができる新しい実験系の一つとして、 リン脂質チューブの自発的揺動運動について述べ、そのメカニズムを考 察し、現象を再現する最も簡単なモデルの構成について述べた。今後こ うした実験系についての知見は µm スケールで起こる様々な生命現象の メカニズムに光を当てることになると期待される。 68 I.3 0.8 trajectry n.c. of θ n.c. of φ 0.4 1 0 θ 0.6 2 φ -A 0.2 O 0 +A -1 -0.2 -2 -3 -1 -0.5 0 θ 0.5 II.4 2 1 -B 4 6 2 4 6 2 4 6 t 8 10 8 10 8 10 θ 1 +A 0.5 O 0 0 -1 -0.5 -A -2 φ -1 +B -3 -1.5 -1.5 -1 -0.5 0 0.5 θ III.3 1 1.5 2 -2 0 t 0.8 trajectry n.c. of θ n.c. of φ φ 0.6 2 φ 2 1.5 1 -4 -2 -0.6 0 2 trajectry n.c. of θ n.c. of φ 3 φ φ -0.4 0.4 1 0.2 O 0 0 -0.2 -1 -0.4 -2 -3 -1 θ -0.6 -0.5 0 θ 0.5 1 -0.8 0 t 図 3.8: 1折点モデルの発展方程式の3種類の特徴的な解。左側は相空間 の構造で、緑の破線が θ の nullcline、青の破線が φ の nullcline、赤の実線 が原点の傍から出発した解の軌道を表す。O、±A、±B は不動点を表す。 右側は左側で書かれた軌道についての θ と φ の時系列で、赤実線が θ、青 破線が φ の時間発展を表す。 69 ただし現段階では現象を大胆に粗視化したモデリングであることは否 定できない。本稿のはじめに述べた µm スケールで特異的に起こりうる 諸効果を明示的にとり込んでいる訳ではないので、たとえば図 3.3 に見ら れるようなビーム強度に依存して振動の不規則性が変化するという現象 などは無視されている。このような現象の本質を説明するためには、非 平衡条件下で起こる揺らぎをきちんと特徴付けることや、チューブの運 動の自由度をもっとたくさん考慮する必要があると思われるが、これら は今後のチャレンジングな課題である。 70 関連図書 [1] O. Gingerich, ガリレオは海王星をみていた, 吉仲正和 訳, p63 (日経 サイエンス社, 1988). [2] R. Aihara and K. Yoshikawa, J. Phys. Chem. A 105, 8445 (2001). [3] H. Mayama, S. M. Nomura, H. Oana and K. Yoshikawa, Chem. Phys. Lett. 330, 361 (2000). [4] N. Magome, H. Katahata, M. Ichikawa, S. -i. M. Nomura and K. Yoshikawa, Phys. Rev. E, 65, 045202 (2002). [5] S. -i. M. Nomura, T. Harada and K. Yoshikawa, Phys. Rev. Lett. 88, 093903 (2002) [6] N. Magome, T. Takemura, and K. Yoshikawa, Chem. Lett. 205 (1996). [7] K. Mishima and K. Satoh, Forma 4, 103 (1989). [8] K. Svoboda and S. M. Block, Annu. Rev. Biophys. Biomol. Struct. 23, 247 (1990). [9] T. Tlusty, A. Meller and R. Bar-Ziv, Phys. Rev. Lett. 24, 1738 (1998). [10] M. Ishikawa, H. Misawa, N. Kitamura, R. Fujisawa, and H. Masuhara, Bull. Chem. Soc. Jpn., 69, 59 (1996). [11] O. Zohar et al., Biophys. J. 74, 82 (1998). 71 第 4 章 光学モーターの運動モー ドスイッチング 職業的な関心事が何であろうと、いまや転換の時代に立っているのだ という感慨から我々は逃れることはできない。この転換の時代とは、環境 の建設的な変革が要求されている時代である。我々は新しい資源を発見し 探索せねばならず、環境をより良く理解せねばならず、また、自然との間 に、より破壊的でない共存を達成せねばならないのである。 − I. プリゴジン [1] 4.1 はじめに 近年、マイクロファブリケーション技術の発達により、マイクロメート ルスケールにおいて様々な形状の物体を加工・製造することが可能になっ て来ているが、そうした技術の応用としてマイクロメーターのスケール でその運動方向や速度を制御できるモーターを構築することは重要な課 題である。過去 20 年において、集光したレーザービームの集光点付近に マイクロメートルサイズの微小誘電体をトラップして操作する技術が確 立され、光ピンセットと呼ばれている。そこで光ピンセットによってた だ単に物体をトラップするだけでなく、トラップされた物体に回転運動 を行わせることが試みられてきた。1980 年に Ashkin は円偏光したビー ムを用いて浮遊させた物体に回転運動を起こすことを提案した [2]。その 後この方法によって実際にガラスやテフロン等の微小粒子 [3]、カルサイ ト等の複屈折物体など [4] に回転運動を誘起できることが示されている。 また Luguerre-Gaussian ビームを用いて物体をトラップすることにより、 ビームの持つ軌道角運動量によって物体を回転させる方法も提案されて いる [5]。 これらは光の持つ角運動量を物体に移送するという方法であったが、一 方、光の散乱によってカイラルな形状をした物体にトルクを与えるとい う方法も研究されて来ている [6, 7]。形状のカイラリティのために、光の 72 散乱によりトラップされた物体にトルクが生じ、集光点の周りで回転運 動を行うのである。この方法によれば簡単な光学系で安定なトラップが 可能であり、高速な回転運動をさせることができる。しかしながらこれ まで、このスキームによる物体の回転方向は物体の形状によって一意的 に決まってしまうと考えられており、その回転方向を制御することはで きていなかった。 本論文ではあるカイラルな形状をした微小誘電体をトラップする際に、 トラップの中心位置を制御することによって物体の運動方向を時計回り /反時計回りの両方向に制御できることを示し、そのメカニズムを考察 する。 4.2 実験系について 実験ではカイラルな形状をした微小誘電体として、アフリカツメガエ ル精子染色体を用いた(図 4.1)。これは直径約 1µm、全長約 20µm でちょ うど一巻き分のらせん形をしており、ほぼ形状の揃ったものを大量に得る ことができる。染色体は文献 [8] に述べられている方法により調製した。 光トラップの中心位置を制御するために、直径 2µm のポリスチレンビー ズを染色体に取り付けた。ビーズのついた染色体をトラップする時、こ れがトラップの中心としてはたらく。ビーズを染色体に取り付けるため に、染色体の懸濁液とカルボキシル基修飾された直径 2µm のビーズ(米 国 Molecular Probes 社より購入)の懸濁液を数比が約 1:1 になるように 混合し、室温にて 1 時間程度、震盪した。この過程で1つの染色体当り 平均1個のビーズがついた(染色体−ビーズ複合体:CBC)。ビーズは染 色体の様々な場所につくので、実験の際にその中から任意に CBC を選び 出して使用した。レーザー照射による熱対流を回避するために、CBC は D2 O 中に分散させた。これは D2 O が、使用している Nd:YAG レーザーの 波長 1064nm に吸収を持たないためである [9]。 レーザーは Nd3+ : YAG レーザー(SL902T, Spectron 社)を TEM00 モー ドにて発振させて使用した。波長は 1064nm である。レーザー光線はビー ムエキスパンダーにて拡大され、連続式 ND フィルターによって減光し た後、倒立顕微鏡(TE-300, Nikon)に導入した。導入するレーザーの強 度は連続式 ND フィルターによって調節した。この方法により変化させ たビーム強度範囲(4∼80mW)にわたって安定したガウス型ビームプロ ファイルを維持することができた。ビームは顕微鏡の対物レンズ(Nikon 73 図 4.1: アフリカツメガエル精子染色体。左はレーザー共焦点顕微鏡の画 像から再構成した疑似3次元像。スケールバーは 5µm。右側は模式図。 PlanFl ×100 油浸レンズ)を用いて集光した。レンズの開口数が 1.30、 油浸用オイルの屈折率が 1.6 であるので、ビームの集光角は約 120 °と見 積もられる。サンプルは明視野顕微鏡によって透過光観察した。画像は 電荷結合素子カメラ(CS8310, Tokyo Electric Industry)により撮影、ビ デオレコーダ(WVD-9000, Sony)で記録し、画像解析ソフト(Cosmos, LIBRARY)を用いて解析した(図 4.2)。 4.3 結果 CBC のビーズ部分を集光レーザーによってトラップすると、CBC は直 ちに集光点にトラップされたビーズを中心として回転運動を始めた。ビー ズがらせん形染色体のどの部分についているかは、選び出した CBC に よってまちまちであるが、多数の CBC について実験した結果、CBC 内 におけるビーズの位置と CBC の運動様式の関係は以下の4通りに分けら れることが分かった(図 4.3)。 (A)ビーズが染色体の端(らせん内側)に付着しており、CBC は光軸 の回りに時計回りに回転する。 (B)ビーズが染色体の端(らせん外側)に付着しており、CBC は光軸 の回りに反時計回りに回転する。 (C)ビーズが染色体の中央付近に付着しており、CBC は光軸の回りに 反時計回りに回転する。 74 Halogen Lamp SAMPLE M STAGE Nd:YAG LASER OBJ Variable ND L L DM M Monitor CCD CAMERA M VIDEO RECORDER 図 4.2: 実験装置の概略。Nd3+ : YAG レーザーから出たビームをビーム エキスパンダーで拡大し、可変 ND フィルターで減光した後、対物レン ズで集光する。サンプルは明視野顕微鏡で透過光観察し、CCD カメラで 撮影した画像をビデオに記録し、画像解析した。 75 (D)ビーズの付いていない染色体のみの場合、染色体の中央部が光軸 に沿ってトラップされ、時計回りに回転する。 それぞれのモードにおいて、CBC の回転速度は入射したビームの強度に 比例することが確かめられた(図 4.4)。 4.4 理論的解析 それでは CBC がトラップされ回転するメカニズムについて議論する。 一般に集光レーザーを照射した微小誘電体にはたらく力は、集光部へ向 かう引力と、光の散乱に伴う散乱力に分けることができる [10]。この系で は引力成分がトラップされる CBC の位置と配向を決定している一方、回 転運動は CBC のカイラルな形状のために散乱力によって駆動されている と考えることができる。 これを確認するために CBC にはたらく散乱力と、溶媒からの粘性力と を見積もった。まず染色体の形状が関数 x = a cos θ r(θ) = y = b sin θ (0 ≤ θ ≤ Θ) z = bθ (4.1) に沿った直径 l のらせん形チューブであると仮定し、顕微鏡像をフィット することにより a ≈ 2.5µm、b ≈ 2.1µm、l ≈ 0.5µm、Θ ≈ 2π という値を 得た。計算の際には、このらせん形チューブを、ビームに対して実験で見 られるのと同じ配置になるように置いた(4.7 節の付録参照)。実験では TEM00 モードのガウシアンビームを開口数 1.30 の油浸レンズで集光して いるので、その強度分布は 2I0 2(x2 + y 2 ) exp I(x, y, z) = − π(w02 + tan2 βz 2 ) w02 + tan2 βz 2 (4.2) という形で近似することができる。ここで w0 はミニマムビームウエスト の半径、β は集光角、I0 は入射光強度であり、実験条件から w0 ≈ 0.5µm、 β ≈ π/3 という値を採用した。 散乱力は幾何光学の法則を用いて以下のように計算した(詳細は付録 参照)。まずらせん形誘電体の各微小部分に着目し、入射光が誘電体に 入射する点における散乱光を Snell の法則より求めた。そして透過・反射 光のモーメントを入射光のモーメントと比較することで、今着目してい 76 0.0sec 5.0sec B 0.0sec 5.0sec C 0.0sec 6.0sec D 0.0sec 3.0sec hν hν hν hν A 図 4.3: 回転するらせん形染色体の連続顕微鏡像と模式図。スケールバー は 5µm を表す。 (A)モード A:ビーズがらせんの内側の端についた場合 の時計回りの回転。 (B)モード B:ビーズがらせんの外側の端についた場 合の反時計回りの回転。 (C)モード C:ビーズがらせんの中央付近につい た場合の反時計回りの回転。 (D)モード D:ビーズがついていない場合 の時計回りの回転。入射光の強度はそれぞれ(A)10mW、 (B)10mW、 (C)20mW、(D)20mW である。 77 2 ω (π rad/sec) Mode A 1 Mode D 0 Mode C -1 Mode B -2 0 20 40 60 80 P (mW) 図 4.4: 各モードにおけるらせん形染色体の回転角速度と入射ビーム強度 の関係。横軸に入射ビーム強度、縦軸に回転各速度を示す。図中で閉円、 閉角、開円、開角はそれぞれ図 4.3 におけるモード A、B、C、D を表す。 78 る微小部分にはたらく散乱力を計算し、回転軸に対するトルクを求めた。 これをらせん全体にわたって積分することで、回転軸に対する散乱力の モーメント TS (I0 ) を入射光強度の関数として得ることができる(図 4.5)。 2c 2πb kt V FD FS a kr ki 図 4.5: 散乱力と粘性抵抗力の見積もり方。らせん形誘電体の各微小部分に 注目し、幾何光学の法則からその部分での光の散乱の大きさを決定し、散 乱力を求める。図中で ki 、kr 、kt はそれぞれ入射光、反射光、透過光の運動 量フラックスを表す。FS は散乱の反作用による力で FS = −(kt + kr − ki ) により決定される。V は回転に伴って注目している部分が動く速度で、FD はこの速度により溶媒から受ける粘性抵抗力を表す。定常的に回転して いる状態では散乱力 FS と粘性抵抗力 FD が釣り合っている。 一方、回転しているらせんにはたらく粘性抵抗は次のようにして求め た。再び各微小部分(位置ベクトルを r(θ) とする)に着目し、その部分 を半径 l の円柱で近似すると、この円柱は溶媒中において ω × r(θ) の速 度で動いていると見なせる。ここで ω は角速度ベクトルである。この円 柱にはたらく粘性抵抗は Oseen 近似をもちいて [11] 計算することができ て、そのトルクをらせん全体について積分すると、回転軸に対する粘性 抵抗のモーメント TD (ω) を角速度の関数として得ることができる。 こうして求めた TS (I0 ) と TD (ω) は、定常的に回転している状態におい 79 て釣り合っていることから、関係式 TS (I0 ) = TD (ω) (4.3) によって、角速度と入射光強度の関係を得ることができる。計算の詳細 は 4.7 節の付録にまわし、図 4.6 にその結果だけを示すが、実験結果を割 合よく再現していると言えよう。 ω (π rad/sec) 2 Mode A 1 Mode D 0 -1 Mode C Mode B -2 0 20 40 60 80 P (mW) 図 4.6: 各モードにおけるらせん形染色体の回転角速度と入射ビーム強度 の関係。付録 4.7 の計算による結果を示す。横軸に入射ビーム強度、縦軸 に回転各速度を示す。図中で閉円、閉角、開円、開角はそれぞれ図 4.3 に おけるモード A、B、C、D を表す。 4.5 考察 次に、各モードにおいて回転方向が変化した理由を考察する。それに は散乱力のトルクはビームの集光点から非常に近い領域における値でほ ぼ決定されているという事実に注目する必要がある。これは、散乱力は 80 その点における局所的な光強度に比例し、ビームが強く集光されている ために集光点付近での光強度が著しく高いためである。このような考察 に基づき、CBC にはたらく散乱力を図示すると図 4.7 のようになる。図 に示されている通り、CBC の回転方向はビームの集光点近傍にはたらく 力によって決定されていることが分かる。 ここでモード(A)とモード(B)について、ビーズの付いている位置 には少しの違いしかないにも関わらず、何故回転方向が逆になるのかに ついてもう少し議論しておく。モード(A)とモード(B)では染色体の 配向はよく似ている。特に、集光点から半径 2 ∼ 3µm 程度の領域では染 色体の配置はほぼ同じであり、この部分に働く力はモード(A)とモード (B)で同じになる。前述したようにこの領域(位置ベクトル r0 で代表す る)にはたらく力(F と表す)が CBC の回転方向を決定している。従っ てモード(A)でのビーズの位置を rA 、モード (B) でのビーズの位置を rB と表すと、それぞれのモードで CBC にはたらくトルクは近似的に TA ≈ (r0 − rA ) × F (4.4) TB ≈ (r0 − rB ) × F (4.5) (4.6) と表せる。ここで r0 を通り、回転軸(光軸)と F とで張られる平面を考 えると、トラップの中心であるビーズがこの平面(零トルク平面と呼ぶ) を挟んで両側にあるので、式 (4.6) で表されるトルクはモード(A)とモー ド(B)とで逆符号になるのである。 4.6 結論と展望 本論文では、光で駆動される同一の形状をした微小回転体の回転方向 を、トラップの中心位置を制御することによって反転させることが可能 であることを実験的に示した。また光の散乱力によるトルクと水の粘性 抵抗によるトルクとを半定量的に求め、実験で見られた各モードの回転 方向を説明することができた。またモード(A)とモード(B)について は、トラップの中心位置がある平面を境に逆転しているために、回転方 向が逆になっていることを議論した。以上の結果はらせん形微小誘電体 とビーズの複合体という特定の系で得られたものであるが、ここで行っ た議論はより一般的に適用することが可能である。本論文で論じたもの 81 A + - B TC + TC NP NP C D TC TC 図 4.7: 各モードにおいてらせん形染色体にはたらく散乱力の向きと大き さ。赤い矢印はレーザー光の散乱による力の向きと大きさを表す。 (A)、 (B)、(C)、(D)は図 4.3 におけるモード A、B、C、D に相当する。ま た(A)、(B)での TC、NP はそれぞれトラップの中心、零トルク平面 を表す。 82 と同様のメカニズムで両方向に回転する微小モーターをデザインし、実 際に製作することは今後に残された課題である。 83 4.7 4.7.1 付録 散乱と粘性抵抗のモーメントの計算 らせん型誘電体の配置 散乱力と粘性抵抗力の計算をする際、らせん型誘電体は実験で見られる のと同様に配置した。その為に式 (4.1) で与えられるらせんを回転させ、 各モードについて次のように置いた。ただし z 軸を回転軸に一致してとっ てある。 (A ) x = a sin θ abπ(cos θ−1)+2abθ r(θ) = y = d − √4a2 +b2 π2 √ 2 θ−1)+b2 πθ z = 4a2 + b2 π 2 − −2a √(cos 4a2 +b2 π 2 (B ) x = a sin θ abπ(cos θ−1)+2abθ r(θ) = y = −d − √4a2 +b2 π2 √ 2 θ−1)+b2 πθ z = 4a2 + b2 π 2 − −2a √(cos 4a2 +b2 π 2 ( C) (4.8) x = bθ r(θ) = y = −a sin θ z = −a(cos θ − 1) (D) (4.7) (4.9) x = √aab 2 +b2 (sin θ − θ) r(θ) = y = a(cos θ − 1) z = a2√sin θ+b2 θ a2 +b2 (4.10) なお、パラメータ a = 2.5µm、b = 2.1µm の値は式 (4.10) で表される曲 線をモード(D)の顕微鏡像にフィットして得た。またパラメータ d はら せんの端点の集光点からの距離に対応し、d = 0.5µm を採用した。 4.7.2 散乱力の計算 光の散乱によりらせん形誘電体にはたらく力のモーメントの計算の詳 細を記す。まずらせん形誘電体の一部分に着目し、その部分のらせんの 単位接線ベクトルを ê(θ) = (ex , ey , ez ) とする。この部分に入射する光の 84 エネルギーフラックスを ki = Iẑ とすると、反射光と透過光のフラックス はそれぞれ kr = R(θ)I (2ez (θ)ê(θ) − ẑ)、kt = (1 − R(θ))Iẑ であるから、 散乱による光のフラックス変化は ∆k = kt + kr − ki = 2R(θ)I(ez (θ)ê(θ) − ẑ) (4.11) で与えられる。ここで R(θ) は光の反射率であり、Fresnel の法則から決定 されるので、らせんに沿っての位置の関数である。また I はいま着目し ている点における光強度であり、式 (4.2) で与えられる。 ∆k c この反作用として誘電体の微小部分には、光速を c として、−2l dr dθ という力が加わり、回転軸(z 軸)のまわりのモーメントの大きさは l dr TS dθ = −4 RI (x, y, z) ez (xey − yex ) dθ c dθ (4.12) となる。 各モードにおける散乱力のモーメントを求めるには式 (4.12) に式 (4.2) と式 (4.7)∼(4.10) を代入して θ について −π から π まで積分すればよい。 その結果、 (A) TS (I0 ) = 1.2 × 10−5 I0 [nN · µm] (B) TS (I0 ) = −1.1 × 10−5 I0 [nN · µm] (4.13) (C) TS (I0 ) = −0.72 × 10−5 I0 [nN · µm] (D) TS (I0 ) = 0.34 × 10−5 I0 [nN · µm] という値を得た。ここで I0 は入射光強度で、単位は W である。 4.7.3 粘性抵抗力の計算 回転しているらせんは周りの溶媒から粘性抵抗力をうける。回転各速 度が ω = ωẑ の場合の粘性抵抗力のモーメントは以下のようにして見積 もった。まず、式 (4.7)∼(4.10) で表されるらせんの一部分(r(θ))に着目 する。この部分は v(θ) = ω × r(θ) という速度で動いており、この内、ら せんのこの部分に垂直な成分は u(θ) = v(θ) − (ê(θ) · v(θ)) ê(θ) (4.14) で与えられる。粘性抵抗力を見積もるためにこの微小部分を半径 l の長 い円柱で近似する。この時、単位長さ当りの粘性抵抗力は Oseen 近似に 85 より、 D(θ) = − 1 2 4πµu(θ) − γ − ln 2l|u(θ)| 8ν (4.15) で与えられる [11]。ただし µ = 1.0×10−6 [g/µm·s]、ν = 1.0×106[µm2 /s]、 γ = 0.577 はそれぞれ水の粘性率、動粘性率、オイラー定数である。この 抵抗力の回転軸周りのモーメントは TD (θ) = [r(θ) × D(θ)]z をらせん全体 について積分して、 dr [r(θ) × D(θ)]z dθ dθ −π π dr (xDy − yDx ) dθ dθ −π π TD (ω) = = (4.16) となる。ここに式 (4.7)∼(4.10) を代入して計算すると (A) (B) (C) (D) 1.7 × 10−4 ω 1.2 × 10−4 ω 1.8 × 10−4 ω 1.9 × 10−4 ω [nN · µm] [nN · µm] [nN · µm] [nN · µm] (4.17) を得た1 。 4.7.4 入射光強度と回転各速度の関係 実験では、らせん形誘電体はレーザー光を照射した直後から定常的に 回転した。これは本系のスケール(µm、sec)では水の粘性抵抗が非常に 大きく(Reinolds 数は 10−6 のオーダー)、定常状態に達するまでの緩和 時間が µsec 程度であるためである。定常的に回転している状態では、本 文でも述べたように散乱力のモーメントと粘性抵抗力のモーメントが釣 り合っていることから、4.7.2 節と 4.7.3 節の結果を併せて、 (A) (B) (C) (D) ω ω ω ω = 0.071I0 = −0.092I0 = −0.041I0 = 0.018I0 (4.18) という関係を得る。この結果を図 4.6 に示す。 1 式 (4.15) では分母にも ln ω という形で ω が入るが、この項は殆ど寄与しないので 式 (4.17) のようにほぼ比例関係が成り立つ 86 関連図書 [1] G. ニコリス, I. プリゴジン, 複雑性の探求, 安孫子誠也, 北原和夫 訳 (みすず書房, 1993). [2] A. Ashkin, Science 210, 1081 (1980). [3] N. B. Simpson, K. Dholakia, L. Allen and M. J. Padgett, Opt. Lett. 22, 52 (1997). [4] M. E. J. Friese, T. A. Nieminen, N. R. Heckenberg and H. Rubinsztein-Dunlop, Nature 394, 348 (1998). [5] L. Paterson, M. P. MacDonald, J. Arlt, W. Sibbett, P. E. Bryant and K. Dholakia, Science 292, 912 (2001). [6] E. Higurashi, H. Ukita, H. Tanaka and O. Ohguchi, Appl. Phys. Lett. 64, 2209 (1994). [7] P. Galajda and P. Ormos, Appl. Phys. Lett. 78, 249 (2001). [8] J. B. Gurdon, J. Embryol. Exp. Morph. 36, 523 (1976). [9] M. Ishikawa, H. Misawa, N. Kitamura, R. Fujisawa, and H. Masuhara, Bull. Chem. Soc. Jpn., 69, 59 (1996). [10] K. Svoboda and S. M. Block, Annu. Rev. Biophys. Biomol. Struct. 23, 247 (1990). [11] 巽友正, 流体力学 (培風館, 2000). 87 第 5 章 まとめと今後の展望 まとめ 本論文では集光レーザー場が創出する µm スケールの非平衡開放系に ついての実験・理論的研究について述べた。それにより、 • ビームウェストの高速走査によって熱ラチェット系を実際に作るこ とができ、その系では非平衡状態においても揺らぎと応答の間に揺 動散逸定理と類似の関係が成立していることが分かった。またこの 性質は本系に限らず、広いクラスのラチェット系でも成立している ことが示唆された。 • 集光レーザー場にトラップされたリン脂質チューブが自発的に揺動 運動することが見いだされ、そのメカニズムを明らかにした。その 結果、集光レーザーによる光学トラップが、レーザーによる溶媒の 局所加熱により不安定化されることで振動が起こることが分かった。 • カイラルな形状の微小誘電体をトラップすると、光の散乱によって 回転運動することを見いだし、またトラップの中心位置を変えるこ とで様々な回転モードが起こることを明らかにした。 という結果を得た。これらはいずれも、サブ µm∼µm サイズの物体を非 接触にトラップし、同時にエネルギーを供給することができる集光レー ザー場の特性によってもたらされたものである。以上の結果は基礎物理 学的なものから応用物理∼工学的なものへと多岐にわたっているが、そ れが集光レーザー場の持つ懐の深さと言うものであろう。 今後の展望 それぞれの話題についての今後の課題は各章のまとめの節で述べたの で、ここではもう少しマクロな研究の展望について述べたい。本論文では 88 メソスケールの非平衡系研究の重要なツールとして集光レーザー場の特 性を述べた。集光レーザー場の応用の可能性はまだまだ広がる余地があ ると考えられるが、研究の主眼は「メソスコピックな非平衡系の特性」で あるので必ずしもレーザーのみにとらわれない発想も必要である。特に 序論でも述べたが、メソスケールの非平衡開放系として最もエキサイティ ングなのは生細胞そのものである [1]。最近、培養細胞系において Hes1 と いう遺伝子の発現レベルが 2 時間周期で振動しているということが見い だされ、我々はそのメカニズムに対する数理モデルを提出している [2]。 このモデルの妥当性を検証し、場合によってはより本質をついたモデル を構築することは今後に残された重要な課題である。細胞内における遺 伝子発現のプロセスは常に大きな揺らぎに晒されているが、このような 環境下でなお、発現レベルに安定な振動が見られるのはどうしてだろう か?また培養心筋細胞系の自律的な拍動は、生命現象における最もダイ ナミックな側面の一つであり、興味深い研究対象である。我々は既に培養 心筋細胞の実験系を立ち上げ、細胞レベルでの非線形ダイナミクスに注 目した研究を始めようとしている。例えば、単一細胞のレベルでは細胞 の自発的収縮は非常に確率的であるが、多数の細胞がギャップ結合を介し て相互作用している状態ではより規則的な拍動を見ることができる。結 合様式に依存したこうした振舞いの変化は物理学的視点から見ても大変 面白い現象であり [3]、こうした観点から実験的な研究を進めることには 大きな意味がある。 89 関連図書 [1] 原田崇広, 吉川研一, Electrochemistry (電気化学および工業物理化学) 71, in press. [2] H.Hirata, S.Yoshiura, T.Ohtsuka, Y.Bessho, T.Harada, K.Yoshikawa, and R.Kageyama, Science 298, 840 (2002). [3] 寺前順之介, 学位論文 (2003). 90 謝辞 本論文は数多くの人の御協力の上で執筆されました。修士過程2年間で 関わった全ての人に感謝したいと思います。 指導教官の吉川研一教授には、学部3回生の頃にこの分野の面白さを 熱心に語っていただいて以来、多大なる直接的なご指導と間接的な影響 とを受けています。特に、言うことを効かないわがまま院生である私を 辛抱強く見守り、全く私の自由に研究を進めさせていただき、また事あ るごとにたくさんのチャンスを頂いたことに関しては、言葉で表しきれ ないほどの感謝を感じております。今後、博士過程3年間においてもよ ろしくご指導お願いします。 また吉川研究室の皆さんには日頃から研究に関係あることないこと色々 と教えていただき大変感謝しています。実験について基本的なことから 色々教えていただき、また研究に関して刺激的なディスカッションがで きたことは勿論ですが、お茶やアルコールを飲んでバカ話をする時間に も大変救われました。数々の失敗にもめげずになんとか修士を修了でき たのは研究室の良い雰囲気のお陰です。また同学年である小河原、北畑、 濱田、宮沢各氏とはお互い良い刺激を与えあい、学んで来れたのではな いかと思います。これからも頑張りましょう。 また研究室 OB の野村 M. 慎一郎博士、岩瀧敏男博士、相原良一博士、 元池 N. 育子博士には研究面、精神面(、経済面?)共にいろいろとご助 言等を頂きました。大変感謝しております。今後もご指導よろしくお願 いします。 また東京大学大学院総合分化研究科の跡見順子教授と大戸恵理さん、藤 田義信さんをはじめとする跡見研究室の皆さんには心筋細胞の培養の方 法等の細胞生物学的手法を色々と教えていただきました。跡見研で学ん だことを本論文に含めることができなくて非常に残念ですが、一ヶ月の 東京滞在で学んだ、皆さんの研究に対する姿勢は私の研究生活に大きな 影響を与えております。今後もご指導よろしくお願いします。また宇都 宮美香秘書と北岡淳子さんには東京滞在中大変お世話になりました。 91 各章の具体的なテーマに関しては、 • 市川正敏氏、眞山博幸博士、馬籠信之博士、野村 M. 慎一郎博士に は光ピンセットシステムに関する様々な問題に相談にのっていただ きました。 • 第 2 章では岩瀧敏男博士オリジナルの顕微鏡用熱浴を使用させても らいました。 • 第 3 章に述べられている全ての実験は共同研究者である野村 M. 慎 一郎博士によるものです。またモデルの基本的なアイデアは吉川研 一教授に負っています。 • 第 4 章ではアフリカツメガエル精子染色体の調製方法について東京 工業大学の大隈圭太助教授に教えていただき、吉川研究室の秋田谷 龍男博士にアドバイスを頂きました。 また私生活においても多くの人々の御協力がありました。特にろくに 連絡もしない親不孝な息子を暖かく見守り、何かにつけて心配してくれ る両親には本当に、深く感謝しています。しかし両親を安心させられる 日が来るのはいつになるんだろう。また、SOUL BAR ZACO のマスター ご夫婦にも色々な面でお世話になりました。ZACO の存在に救われた日 も数多くあります。 という訳で全部書いていたら紙面を大きく占領してしまいそうなので この辺でやめますが、とにかく皆様、ありがとうございました。今後も よろしくお願いします。 92
© Copyright 2026 Paperzz