三菱 センサレスサーボ ドライブユニット
〒100−8310
東京都千代田区丸の内2-7-3(東京ビル)
三菱 センサレスサーボ ドライブユニット
お問合せは下記へどうぞ
本社機器営業第二部....〒100-8310
北海道支社...................〒060-8693
東北支社........................〒980-0011
関越支社........................〒330-6034
新潟支店........................〒950-8504
神奈川支社...................〒220-8118
北陸支社........................〒920-0031
中部支社........................〒451-8522
豊田支店........................〒471-0034
関西支社........................〒530-8206
中国支社........................〒730-8657
四国支社........................〒760-8654
九州支社........................〒810-8686
東京都千代田区丸の内2-7-3(東京ビル7階)......................................................................................................................(03)3218-6740
北海道札幌市中央区北2条西4丁目1(北海道ビル).........................................................................................................(011)212-3793
宮城県仙台市青葉区上杉1-17-7(仙台上杉ビル).............................................................................................................(022)216-4546
埼玉県さいたま市中央区新都心11番地2(明治安田生命さいたま新都心ビル ランド・アクシス・タワー )...(048)600-5835
新潟県新潟市中央区東大通2-4-10(日本生命ビル).........................................................................................................(025)241-7227
神奈川県横浜市西区みなとみらい2-2-1(横浜ランドマークタワー ).......................................................................(045)224-2623
石川県金沢市広岡3-1-1(金沢パークビル)........................................................................................................................(076)233-5502
愛知県名古屋市西区牛島6番1号(名古屋ルーセントタワー ).....................................................................................(052)565-3326
愛知県豊田市小坂本町1-5-10(矢作豊田ビル).................................................................................................................(0565)34-4112
大阪府大阪市北区堂島2-2-2(近鉄堂島ビル)....................................................................................................................(06)6347-2821
広島県広島市中区中町7-32(ニッセイ広島ビル) ............................................................................................................(082)248-5445
香川県高松市寿町1-1-8(日本生命高松駅前ビル)...........................................................................................................(087)825-0055
福岡県福岡市中央区天神2-12-1(天神ビル)......................................................................................................................(092)721-2251
●電話技術相談窓口 受付時間※1 月曜∼金曜 9:00∼19:00、土曜・日曜・祝日 9:00∼17:00
対象機種
ドライブユニット/インバータ
電話番号
FREQROLシリーズ
MELSEC-Q/L/QnA/Aシーケンサ一般(下記以外)
MELSEC-FX/Fシーケンサ全般
ネットワークユニット/シリアルコミュニケーションユニット
アナログユニット/温調ユニット/温度入力ユニット/高速カウンタユニット
MELSOFT GXシリーズ
SW□IVD-GPPA/GPPQなど
MELSOFT 統合エンジニアリング環境
MELSOFT iQ Works (Navigator)
MELSOFT MXシリーズ
MELSOFT 通信支援ソフトウェアツール
SW□D5F-CSKP/OLEX/XMOPなど
MELSECパソコンボード
Q80BDシリーズなど
C言語コントローラ/MESインタフェースユニット/高速データロガーユニット
MELSOFT シーケンサプログラミングツール
シーケンサ
052-722-2182
052-711-5111
052-725-2271 ※2
052-712-2578
052-712-2579
052-711-0037
052-712-2370
iQ Sensor Solution
プロセスCPU
MELSEC計装/Q二重化
MELSEC Safety
電力計測ユニット/絶縁監視ユニット
052-712-2830 ※2
QE8□シリーズ
052-719-4557 ※2※3
052-725-2271 ※2
GOT-F900/DUシリーズなど
表示器
GOT1000/A900シリーズなど
MELSOFT GTシリーズ
MELSERVOシリーズ
位置決めユニット/シンプルモーションユニット
モーションCPU (Q/Aシリーズ)
MELSOFT MTシリーズ/MRシリーズ
サーボ/位置決めユニット/モーションコントローラ
ロボット
MELFAシリーズ
052-712-3079 ※2
052-712-2417
052-712-6607
052-721-0100
※1:春季・夏季・年末年始の休日を除く ※2:金曜は17:00まで ※3:土曜・日曜・祝日を除く
●FAX技術相談窓口 受付時間※4 9:00∼16:00(受信は常時※5)
対象機種
上記電話技術相談対象機種
電力計測ユニット/絶縁監視ユニット(QE8□シリーズ)
FAX番号
052−719−6762
084−926−8340
三菱電機FAサイトの「仕様・機能に関するお問い合わせ」もご利用ください。
※4:土曜・日曜・祝日、春季・夏季・年末年始の休日を除く ※5:春季・夏季・年末年始の休日を除く
海外(FAセンター )のお問合せ先は裏面を参照してください。
Refer to the reverse side for the international FA Centers abroad.
IB(名)-0600488-B(1308)MEE
この印刷物は、2013年8月の発行です。なお、お断りなしに仕様を変更することがありますのでご了承ください。
FR-E700EX取扱説明書(応用編)
二重化CPU
MELSOFT PXシリーズ
安全シーケンサ(MELSEC-QSシリーズ)
安全コントローラ(MELSEC-WSシリーズ)
小形・高性能ドライブユニット
三菱 センサレスサーボ ドライブユニット
三菱電機FA機器電話、FAX技術相談
取扱説明書(応用編)
B
FR-E720EX-0.1K∼0.75K
概 要
1
配 線
2
ドライブユニット使用上の注意
3
パラメータ
4
異常とその対策について
5
保守・点検時の注意点について
6
仕 様
7
このたびは、三菱センサレスサーボ ドライブユニットをご採用いただき、誠にありがとうございます。
この取扱説明書(応用編)は、FREQROL-E700EXシリーズをより高度な使用を目的とされた場合の説明書となっております。
誤った取り扱いは思わぬ不具合を引き起こしますので、ご使用前に必ずこの取扱説明書と製品同梱の取扱説明書(基礎編)[IB0600487]を熟読され、正しくご使用くださいますようお願いいたします。
2. 火災防止のために
安全上の注意
注意
据付け、運転、保守、点検の前に必ず取扱説明書(基礎編)とその付
ドライブユニットは、穴の開いていない(ドライブユニットの
属書類をすべて熟読し、正しくご使用ください。機器の知識、安全
フィンなどに背面から触れられないよう)不燃性の壁などに取り
付けてください。可燃物への取付けおよび可燃物近くへの取付
けは、火災の原因になります。
ドライブユニットが故障した場合は、ドライブユニットの電源を
の情報そして注意事項のすべてについて習熟してからご使用くだ
さい。
この取扱説明書では、安全注意事項のランクを「危険」、「注意」と
して区分してあります。
危険
取扱いを誤った場合に、危険な状況が起こりえて、死
注意
取扱いを誤った場合に、危険な状況が起こりえて、中
亡または重傷を受ける可能性が想定される場合。
程度の傷害や軽傷を受ける可能性が想定される場合お
よび物的損害だけの発生が想定される場合。
なお、 注意 に記載した事項でも、状況によっては重大な結果に
遮断してください。大電流が流れ続けると火災の原因になります。
ブレーキ抵抗器を使用する場合は、異常信号で電源を遮断して
ください。ブレーキトランジスタの故障などにより、ブレーキ
抵抗器が異常過熱し火災の原因になリます。
直流端子P/+、N/-に抵抗器を直接接続しないでください。火災
の原因になります。
取扱説明書に記載の日常点検および定期点検を必ず実施してください。
点検を怠って使用し続けると破裂・破損・火災の原因になります。
結びつく可能性があります。いずれも重要な内容を記載しています
3. 傷害防止のために
ので必ず守ってください。
注意
1. 感電防止のために
危険
ドライブユニット通電中は表面カバーや配線カバーを開けない
でください。また、表面カバーや配線カバーをはずした状態で運
転しないでください。高電圧の端子および充電部が露出していま
すので感電の原因となります。
各端子には取扱説明書に決められた電圧以外は印加しないでく
ださい。破裂・破損などの原因になります。
端子接続を間違えないでください。破裂・破損などの原因になります。
極性(+−)を間違えないでください。破裂・破損などの原因になります。
通電中や電源遮断後のしばらくの間は、ドライブユニットは高温
になりますので触らないでください。火傷の原因になります。
電源OFF時でも配線作業・定期点検以外では表面カバーをはずさ
ないでください。ドライブユニット内部は充電されており感電の
原因となります。
配線作業や点検は、電源を遮断し、操作パネルの表示が消灯した
ことを確認し、電源遮断後10分以上経過したのちに、テスタな
4. 諸注意事項
次の注意事項についても十分留意ください。取扱いを誤った場合には
思わぬ故障・けが・感電などの原因となることがあります。
(1) 運搬・据付けについて
注意
どで電圧を確認してから行ってください。電源を遮断した後しば
らくの間はコンデンサが高圧で充電されていて危険です。
ドライブユニットは保護接地 D 種以上の接地工事を行ってくだ
さい。
配線作業や点検は専門の技術者が行ってください。
本体を据え付けてから配線してください。感電、傷害の原因にな
ります。
濡れた手で Mダイヤル操作およびキーを操作しないでください。
感電の原因になります。
電線は傷つけたり、無理なストレスをかけたり、重いものを載せ
たり、挟み込んだりしないでください。感電の原因になります。
濡れた手で基板に触れたり、ケーブル類の抜き差しをしないでく
ださい。感電の原因となります。
主回路コンデンサ容量を測定する場合、電源OFF時にモータへ約
1s間、直流電圧を印加します。感電の原因となりますので、電
源OFF直後は、モータ端子等に触れないでください。
PMモータは、磁石を内蔵した同期電動機のため、ドライブユニッ
トの電源を切った状態でもモータが回っている間は、モータの端
子には高電圧が発生しています。配線、保守点検はモータが停止
していることを確認して行ってください。
モータが負荷に回される用途では、ドライブユニットの出力側に
製品の重さに応じて正しい方法で運搬してください。けがの原因
になります。
制限以上の多段積をおやめください。
製品は、重さに耐える所に、取扱説明書に従って取り付けてください。
損傷、部品が欠けているドライブユニットを据え付け、運転しな
いでください。
運搬時は表面カバーやMダイヤルを持たないでください。落下や
故障することがあります。
製品の上に乗ったり重いものを載せないでください。
取付け方向は必ずお守りください。
ドライブユニット内部にねじ・金属片などの導電性異物や油など
の可燃性異物が混入しないようにしてください。
ドライブユニットは精密機器ですので、落下させたり、強い衝撃
を与えないようにしてください。
下記の環境条件でご使用ください。ドライブユニット故障の原因
になります。
周囲温度
−10℃∼+50℃(凍結のないこと)
周囲湿度
90%RH以下(結露のないこと)
環 保存温度
−20℃∼+65℃
屋内(腐食性ガス、引火性ガス、
雰囲気
オイルミスト・じんあいのないこと)
境
2
標高・振動 海抜1000m以下・5.9m/s 以下、10∼55Hz(X、
Y、Z各方向)
低圧手動開閉器を接続し、開閉器を開いて、配線、保守点検を
行ってください。感電のおそれがあります。ドライブユニットの
出力側には電磁接触器を使用しないでください。
輸送時などの短時間に適用できる温度です。
木製梱包材の消毒・除虫対策のくん蒸剤に含まれるハロゲン系物
質(フッ素、塩素、臭素、ヨウ素など)が弊社製品に侵入すると故
障の原因となります。梱包の際は、残留したくん蒸成分が弊社製
品に侵入しないように注意するか、くん蒸以外の方法(熱処理な
ど)で消毒・除虫対策をしてください。
なお、木製梱包材の消毒・除虫対策は梱包前に実施してください。
A-1
(2) 配線について
注意
ドライブユニットの出力側には、進相コンデンサやサージキ
ラー・ラジオノイズフィルタを取り付けないでください。過熱・
焼損の恐れがあります。
出力側(端子U、V、W)は正しく接続してください。
電源を切った状態でも、PM モータが回転している間は PM モー
タ接続端子U、V、Wには高電圧が発生していますので、必ずPM
モータが停止していることを確認して行ってください。感電のお
それがあります。
PMモータを商用電源に絶対に接続しないでください。
PMモータの入力端子(U、V、W)に商用電源を印加するとPMモー
タが焼損します。PMモータはドライブユニットの出力端子(U、
V、W)と接続してください。
(3) 試運転調整について
外部サーマルによる過熱保護を合わせて設置することを推奨し
ます。
電源側の電磁接触器でドライブユニットの頻繁な始動・停止を行
わないでください。ドライブユニットの寿命が短くなります。
ノイズフィルタなどにより電磁障害の影響を小さくしてくださ
い。ドライブユニットの近くで使用される電子機器に障害を与え
る恐れがあります。
高調波抑制のための対策を行ってください。ドライブユニットか
ら発生する電源高調波によって、進相コンデンサや発電機が過
熱・損傷する恐れがあります。
パラメータクリア、オールクリアを行った場合、運転前に必要な
パラメータを再設定してください。各パラメータが初期値に戻り
ます。
注意
運転前に各パラメータの確認・調整を行ってください。機械に
よっては予期せぬ動きとなる場合があります。
ドライブユニットは容易に高速運転の設定ができますので、設定
変更にあたってはモータや機械の性能を十分確認しておいてか
らお使いください。
ドライブユニットのブレーキ機能では停止保持ができません。別
(4) 使用方法について
危険
PMモータとドライブユニットは必ず指定の容量を組み合わせて
ください。
ドライブユニット 1台に複数台の PMモータを接続して使用する
ことはできません。
リトライ機能を選択するとトリップ時に突然再始動しますので
近寄らないでください。
注意
電子サーマルではモータの過熱保護ができない場合があります。
に保持装置を設置ください。
長期保存後にドライブユニットを運転する場合は、点検、試験運
転を実施してください。
静電気による破損を防ぐため、本製品に触れる前に、身体の静電
気を取り除いてください。
PMモータ使用時に、出力側の開閉器を閉じる場合は、ドライブ
ユニットの電源をONした後に行ってください。
(5) 異常時の処置について
を押した場合でも、機能設定状態により出力停止しない場
合がありますので、緊急停止を行う回路(電源遮断および緊急停
止用機械ブレーキ動作など)、スイッチは別に用意してください。
運転信号を入れたままアラームリセットを行うと突然再始動し
ますので、運転信号が切れていることを確認してから行ってくだ
さい。
PMモータが負荷側から回されモータの最大回転速度を超える用
途には使用できません。
専用PMモータ以外の同期モータ、誘導モータ、誘導同期モータ
は使用できません。
専用PMモータ以外の負荷には使用しないでください。
注意
ドライブユニットが故障しても機械、装置が危険な状態にならな
いよう、非常ブレーキなどの安全バックアップ装置を設けてくだ
さい。
ドライブユニット入力側のブレーカがトリップした場合は、配線
の異常(短絡など)、ドライブユニット内部部品の破損などが考え
られます。ブレーカがトリップした原因を特定し、原因を取り除
いたうえで再度ブレーカを投入してください。
保護機能が動作したときは、原因の処置を行ってから、ドライブ
ユニットをリセットして、運転を再開してください。
(6) 保守点検・部品の交換について
ドライブユニット出力に他の電気機器を接続すると、機器が破損
することがあります。
改造は行わないでください。
取扱説明書に記載のない部品取外し行為は行わないでください。
故障や破損の原因になります。
注意
ドライブユニットの制御回路はメガーテスト ( 絶縁抵抗測定 ) を
行わないでください。故障の原因となります。
(7) 廃棄について
注意
産業廃棄物として処置してください。
一般的注意
本取扱説明書に記載されている全ての図解は、細部を説明するため
にカバーまたは安全のための遮断物を取りはずした状態で描かれ
ている場合がありますので、製品を運転するときは必ず規定どおり
のカバーや遮断物を元どおりに戻し、取扱説明書に従って運転して
ください。
なお、専用PMモータにつきましては、専用PMモータの取扱説明
書、センサレスサーボカタログをご覧ください。
A-2
目 次
1
概 要
1.1
製品の確認と各部の名称 .................................................................................................. 2
1.2
ドライブユニットと周辺機器........................................................................................... 3
1.2.1
1.3
カバーの取外しと取付け方 .............................................................................................. 5
表面カバー ................................................................................................................................................5
1.3.2
配線カバー ................................................................................................................................................5
ドライブユニットの据付けと盤設計 ............................................................................... 6
1.4.1
ドライブユニットの設置環境 .................................................................................................................6
1.4.2
ドライブユニット盤の冷却方式の種類..................................................................................................8
1.4.3
ドライブユニットの配置 .........................................................................................................................9
配 線
11
2.1
配線について....................................................................................................................12
2.2
主回路端子仕様................................................................................................................13
2.2.1
主回路端子の仕様.................................................................................................................................. 13
2.2.2
主回路端子の端子配列と電源、モータの配線 ................................................................................... 13
2.2.3
電線、配線長など.................................................................................................................................. 14
2.3
制御回路仕様....................................................................................................................16
2.3.1
制御回路端子について.......................................................................................................................... 16
2.3.2
制御ロジック切換え.............................................................................................................................. 18
2.3.3
制御回路の配線 ..................................................................................................................................... 20
2.3.4
PU コネクタへの接続 ........................................................................................................................... 22
2.4
3
周辺機器の紹介 ........................................................................................................................................4
1.3.1
1.4
2
1
別置形オプションユニットとの接続 .............................................................................24
2.4.1
専用外付ブレーキ抵抗器 (MRS 形、FR-ABR) を接続する場合 (0.4K 以上 ) ............................. 24
2.4.2
ブレーキユニット (FR-BU2) の接続 ................................................................................................. 26
2.4.3
高力率コンバータ (FR-HC2) の接続 ................................................................................................. 27
2.4.4
電源回生共通コンバータ (FR-CV) の接続 ........................................................................................ 28
2.4.5
DC リアクトル (FR-HEL) を接続する場合 ....................................................................................... 28
ドライブユニット使用上の注意
3.1
29
ノイズ (EMI) と漏れ電流について .................................................................................30
3.1.1
漏れ電流とその対策.............................................................................................................................. 30
3.1.2
ドライブユニットから発生するノイズ (EMI) の種類と対策 ........................................................... 32
I
目
次
4
3.1.3
電源高調波..............................................................................................................................................34
3.1.4
高調波抑制対策ガイドライン...............................................................................................................35
3.2
リアクトルの設置について ............................................................................................ 36
3.3
電源遮断と電磁接触器 (MC) .......................................................................................... 37
3.4
ドライブユニット使用上の注意 .................................................................................... 38
3.5
ドライブユニットを使用したシステムのフェールセーフについて .......................... 40
パラメータ
4.1
操作パネル ....................................................................................................................... 44
4.1.1
操作パネルの各部の名称 ......................................................................................................................44
4.1.2
基本操作 ( 出荷設定時 )........................................................................................................................45
4.1.3
運転モードを簡単設定 ( 簡単設定モード ).........................................................................................46
4.1.4
パラメータ設定値を変更する...............................................................................................................47
4.1.5
M ダイヤルプッシュ .............................................................................................................................47
4.2
パラメータ一覧 ............................................................................................................... 48
4.2.1
4.3
パラメータ一覧表 ..................................................................................................................................48
PM センサレスベクトル制御について ........................................................................ 65
4.3.1
PM センサレスベクトル制御の概要.................................................................................................. 65
4.3.2
制御方法の変更 (Pr.800) ................................................................................................................... 65
4.4
速度制御について .......................................................................................................... 68
4.4.1
速度制御の概要.................................................................................................................................... 68
4.4.2
速度制御ゲインの調整 (Pr.820 、 Pr.821 、 X44 信号 ) .................................................................. 70
4.4.3
速度フィードフォワード制御、モデル適応速度制御 (Pr.828、Pr.877 ∼ Pr.881)................... 73
4.4.4
速度偏差過大 (Pr.285、Pr.853)....................................................................................................... 74
4.4.5
ノッチフィルタ (Pr.862、Pr.863、Pr.871)................................................................................... 75
4.4.6
速度推定ゲイン、電流制御ゲイン (Pr.730、Pr.824、Pr.825).................................................... 76
4.5
II
43
位置制御について .......................................................................................................... 77
4.5.1
位置制御の概要.................................................................................................................................... 77
4.5.2
位置制御のゲイン調整 (Pr.422、Pr.423、Pr.427、Pr.427、Pr.463、Pr.698、Pr.877) ...... 79
4.5.3
ポイントテーブル簡易位置決め機能 (Pr.4 ∼ 6、Pr.24 ∼ Pr.27、Pr.465 ∼ Pr.478、Pr.525 ∼
Pr.531、Pr.537、Pr.578 ∼ Pr.591) .............................................................................................. 81
4.5.4
位置制御の停止動作 (Pr.464、Pr.535) ............................................................................................ 85
4.5.5
押当て制御機能 (Pr.512 ∼ Pr.515 、X29 信号 )............................................................................ 87
4.5.6
位置制御原点復帰(Pr.110、Pr.111、Pr.453、Pr.455、Pr.508、Pr.509、Pr.532 ∼ Pr.534).
89
4.5.7
電子ギアの設定 (Pr.420、Pr.421)................................................................................................... 92
4.5.8
位置決め調整パラメータの設定 (Pr.426、Pr.506、Pr.507、Pr.510、Pr.511、Pr.536、Y36
信号、PBSY 信号、MEND 信号、CPO 信号、FP 信号 ).............................................................. 93
4.6
モータの出力トルク ( 電流 ) を調整する..................................................................... 95
4.6.1
4.7
トルク制限動作 (Pr.22、Pr.48、Pr.156、Pr.157)........................................................................ 95
回転速度を制限する ...................................................................................................... 98 目
4.7.1
上下限設定 (Pr.1、Pr.2)..................................................................................................................... 98
4.7.2
機械共振点を避ける ( 速度ジャンプ )(Pr.31 ∼ Pr.36) .................................................................. 99
4.8
外部端子による速度設定 ............................................................................................ 100
4.8.1
多段速設定による運転 (Pr.4 ∼ Pr.6、Pr.24 ∼ Pr.27、Pr.232 ∼ Pr.239)............................. 100
4.8.2
JOG 運転 (Pr.15、Pr.16、JOG 信号、JOG2 信号 ) ................................................................. 102
4.8.3
遠隔設定機能 (Pr.59) ....................................................................................................................... 105
4.9
加減速時間と加減速パターンの設定 ......................................................................... 108
4.9.1
加速時間、減速時間の設定
(Pr.7、Pr.8、Pr.20、Pr.44、Pr.45、Pr.147、Pr.375、Pr.791、Pr.792) ............................ 108
4.9.2
モータ始動速度 (Pr.13) ................................................................................................................... 111
4.9.3
加減速パターン (Pr.29) ................................................................................................................... 112
4.10 モータの選択と保護 .................................................................................................... 113
4.10.1 モータの過熱保護 ( 電子サーマル )(Pr.9) ..................................................................................... 113
4.11 モータのブレーキと停止動作..................................................................................... 114
4.11.1 ゼロ速制御と予備励磁、サーボオン、サーボロック (Pr.10、Pr.11、Pr.802、LX 信号、SON
信号 ) .................................................................................................................................................. 114
4.11.2 電磁ブレーキを動作させる (MBR 信号、Pr.736) ....................................................................... 117
4.11.3 回生ブレーキの選択 (Pr.30 、 Pr.70).............................................................................................. 118
4.11.4 停止選択 (Pr.250) ............................................................................................................................ 119
4.12 外部端子の機能割付と制御 ........................................................................................ 120
4.12.1 入力端子機能選択 (Pr.178 ∼ Pr.184)........................................................................................... 120
4.12.2 ドライブユニット出力遮断信号 (MRS 信号、Pr.17)................................................................... 122
4.12.3 第 2 機能選択信号 (RT) の動作条件選択 (RT 信号 ) ................................................................... 123
4.12.4 始動信号動作選択 (STF、STR、STOP 信号、Pr.250) ............................................................. 124
4.12.5 出力端子機能選択 (Pr.190 ∼ Pr.192)........................................................................................... 126
4.12.6 回転速度の検出 (SU、FU 信号、Pr.41 ∼ Pr.43、Pr.870)........................................................ 130
4.12.7 出力電流の検出機能 (Y12 信号、Y13 信号、Pr.150 ∼ Pr.153)............................................... 131
4.12.8 リモート出力機能 (REM 信号、Pr.495、Pr.496) ....................................................................... 133
4.13 モニタ表示とモニタ出力信号..................................................................................... 134
4.13.1 回転速度表示と回転数設定 (Pr.37、Pr.144) ............................................................................... 134
4.13.2 DU/PU、端子 FM のモニタ表示選択
(Pr.52、Pr.54、Pr.170、Pr.171、Pr.268、Pr.430、Pr.563、Pr.564)................................ 135
4.13.3 端子 FM( パルス列出力 ) の基準について (Pr.55、Pr.56) ......................................................... 140
4.13.4 端子 FM 校正 ( 校正パラメータ C0(Pr.900)) .............................................................................. 141
4.14 異常発生時の動作設定 ................................................................................................ 143
III
次
4.14.1 リトライ機能 (Pr.65、Pr.67 ∼ Pr.69).......................................................................................... 143
4.14.2 入出力欠相保護選択 (Pr.251、Pr.872) ......................................................................................... 145
4.14.3 始動時地絡検出有無 (Pr.249) ......................................................................................................... 145
4.14.4 過速度検出 (Pr.374)......................................................................................................................... 146
4.15 アナログ入力 ( 端子 2、4) による速度設定 ............................................................. 147
4.15.1 アナログ入力選択 (Pr.73、Pr.267) ............................................................................................... 147
4.15.2 速度設定をアナログで行う ( 電圧入力 / 電流入力 ) ..................................................................... 150
4.15.3 アナログ入力の応答性やノイズ除去 (Pr.74)................................................................................. 151
4.15.4 速度設定電圧 ( 電流 ) のバイアスとゲイン
(Pr.125、Pr.126、Pr.241、C2(Pr.902) ∼ C7(Pr.905))......................................................... 152
4.16 誤操作防止とパラメータ設定の制限 ........................................................................ 157
4.16.1 リセット選択/ PU 抜け検出/ PU 停止選択 (Pr.75).................................................................. 157
4.16.2 パラメータ書込禁止選択 (Pr.77) .................................................................................................... 160
4.16.3 逆転防止選択 (Pr.78) ....................................................................................................................... 161
4.16.4 拡張パラメータの表示 (Pr.160) ..................................................................................................... 161
4.16.5 パスワード機能 (Pr.296、Pr.297)................................................................................................. 162
4.17 運転モードと操作場所の選択 .................................................................................... 165
4.17.1 運転モード選択 (Pr.79).................................................................................................................... 165
4.17.2 電源投入時の運転モードについて (Pr.79、Pr.340) .................................................................... 172
4.17.3 通信運転時の始動指令権と速度指令権 (Pr.338、Pr.339、Pr.550、Pr.551).......................... 173
4.18 通信運転と設定 ........................................................................................................... 179
4.18.1 PU コネクタの配線と構成................................................................................................................ 179
4.18.2 RS-485 通信の初期設定と仕様 (Pr.117 ∼ Pr.120、Pr.123、Pr.124、Pr.549) ................... 182
4.18.3 通信異常時の動作選択 (Pr.121、Pr.122、Pr.502) ..................................................................... 183
4.18.4 通信 EEPROM 書込みの選択 (Pr.342) .......................................................................................... 186
4.18.5 三菱インバータプロトコル ( 計算機リンク通信 ) について......................................................... 187
4.18.6 Modbus-RTU 通信仕様 (Pr.117、Pr.118、Pr.120、Pr.122、Pr.343、Pr.502、Pr.549). 199
4.19 特殊な運転や回転速度制御 ........................................................................................ 211
4.19.1 PID 制御 ( 速度制御 )(Pr.127 ∼ Pr.134)...................................................................................... 211
4.19.2 回生回避機能 (Pr.665、Pr.882、Pr.883、Pr.885、Pr.886) .................................................... 218
4.20 便利な機能 ................................................................................................................... 220
4.20.1 ドライブユニット部品の寿命表示 (Pr.255 ∼ Pr.259) ................................................................ 220
4.20.2 メンテナンスタイマ警報 (Pr.503、Pr.504) ................................................................................. 223
4.20.3 電流平均値モニタ信号 (Pr.555 ∼ Pr.557) ................................................................................... 224
4.20.4 フリーパラメータ (Pr.888、Pr.889) ............................................................................................. 226
4.20.5 任意のアラームを発生させる (Pr.997).......................................................................................... 227
4.21 パラメータユニット、操作パネルの設定................................................................. 228
4.21.1 RUN キー回転方向選択 (Pr.40)...................................................................................................... 228
IV
4.21.2 M ダイヤルボリュームモード / キーロック操作選択 (Pr.161) .................................................. 229
4.21.3 速度変化量設定 (Pr.295)................................................................................................................. 232
4.21.4 ブザー音制御 (Pr.990) .................................................................................................................... 233
4.21.5 PU コントラスト調整 (Pr.991) ...................................................................................................... 233
目
4.22 パラメータクリア、オールクリア............................................................................. 234
4.23 初期値変更リスト........................................................................................................ 235 次
4.24 アラーム履歴の確認とクリア..................................................................................... 236
5
異常とその対策について
239
5.1
保護機能のリセット方法 ............................................................................................. 240
5.2
異常表示一覧................................................................................................................. 241
5.3
原因とその対策............................................................................................................. 242
5.4
デジタル表示と実文字との対応.................................................................................. 251
5.5
お困りのときはまず確認してください ...................................................................... 252
5.5.1
モータが始動しない............................................................................................................................252
5.5.2
モータ、機械が異常音を発している.................................................................................................253
5.5.3
モータが異常に発熱する ....................................................................................................................253
5.5.4
モータの回転方向が逆である ............................................................................................................254
5.5.5
回転速度が設定の値に対し大きく異なる .........................................................................................254
5.5.6
加減速がスムーズでない ....................................................................................................................254
5.5.7
運転中に回転速度が変動する ............................................................................................................254
5.5.8
運転モードの切り換えが正常に行われない .....................................................................................255
5.5.9
操作パネルが表示しない ....................................................................................................................255
5.5.10 モータ電流が大きい............................................................................................................................255
5.5.11 回転速度が上昇しない........................................................................................................................256
5.5.12 パラメータの書込みができない ........................................................................................................256
6
保守・点検時の注意点について
6.1
257
点検項目 ........................................................................................................................ 258
6.1.1
日常点検 ...............................................................................................................................................258
6.1.2
定期点検 ...............................................................................................................................................258
6.1.3
日常点検および定期点検 ....................................................................................................................259
6.1.4
ドライブユニット部品の寿命表示 ....................................................................................................259
6.1.5
インバータモジュールおよびコンバータモジュールのチェック方法...........................................260
6.1.6
清掃.......................................................................................................................................................260
6.1.7
部品交換について................................................................................................................................260
6.1.8
ドライブユニット交換について ........................................................................................................261
V
6.2
7
主回路の電圧・電流および電力測定法.......................................................................262
6.2.1
電力の測定........................................................................................................................................... 264
6.2.2
電圧の測定と PT の使用について .................................................................................................... 264
6.2.3
電流の測定........................................................................................................................................... 265
6.2.4
CT およびトランスデューサの使用について.................................................................................. 265
6.2.5
ドライブユニット入力力率の測定 .................................................................................................... 265
6.2.6
コンバータ出力電圧 ( 端子 P-N 間 ) の測定 ................................................................................... 265
6.2.7
ドライブユニット出力周波数の測定 ................................................................................................ 265
6.2.8
メガーテスト....................................................................................................................................... 266
6.2.9
耐圧テスト........................................................................................................................................... 266
仕 様
267
7.1
定格.................................................................................................................................268
7.2
共通仕様.........................................................................................................................269
7.3
外形寸法図 .....................................................................................................................270
7.4
専用 PM モータ [MM-GKR シリーズ ] 仕様 ...............................................................271
7.4.1
モータ仕様........................................................................................................................................... 271
7.4.2
モータトルク特性 ............................................................................................................................... 272
付 録
273
付録 1 サーボからの置換えのお客様へ............................................................................. 274
付録 1-1 AC サーボとの主な相違点 ........................................................................................................... 274
付録 1-2 サーボからの置換え時の注意事項 .............................................................................................. 274
付録 2 索引........................................................................................................................... 275
VI
1
概 要
この章では、本製品をお使いいただく上での基本的な「概要」に
ついて説明しています。
注意事項など必ず一読してからご使用ください。
1.1
1.2
1.3
1.4
製品の確認と各部の名称 ..................................................................... 2
ドライブユニットと周辺機器 ............................................................. 3
カバーの取外しと取付け方 ................................................................. 5
ドライブユニットの据付けと盤設計.................................................. 6
1
<略称と総称>
PU:操作パネルおよびパラメータユニット(FR-PU07)
ドライブユニット:三菱センサレスサーボ ドライブユニットFREQROL-E700EXシリーズ
2
FR-E700EX:三菱センサレスサーボ ドライブユニットFREQROL-E700EXシリーズ
Pr.:パラメータ番号(ドライブユニットの機能番号)
PU運転:PU(操作パネル/FR-PU07)を使用しての運転
外部運転:制御回路信号を使用しての運転
併用運転:PU(操作パネル/FR-PU07)と外部操作の併用による運転
3
PMモータ、モータ:専用磁石モータMM-GKRシリーズ
<各種商標>
Microsoft、Visual C++は、米国Microsoft Corporationの米国およびその他の国における登
録商標または商標です。
その他の記載してある会社名、製品名は、それぞれの会社の商標または登録商標です。
4
<マーク>
備 考:知っておくと参考になる補足的な内容、他機能との関連を記載しています。
5
注 記:注意が必要な内容、または設定しても機能しない場合がある内容を記載しています。
ポイント:知っておくと便利な内容、要点を記載しています。
参照パラメータ:関連するパラメータを記載しています。
6
高調波抑制対策ガイドライン
特定需要家において使用されるドライブユニットは全ての機種が、『高圧又は特別高圧で受電する需要家の高
調波抑制対策ガイドライン』の対象となります。(詳細は、35ページ を参照してください)
7
1
製品の確認と各部の名称
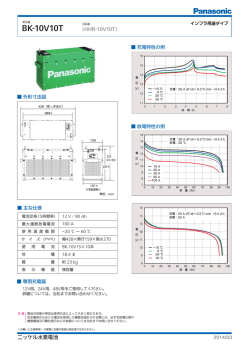
1.1 製品の確認と各部の名称
梱包箱からドライブユニットを取り出し、表面カバーの容量名板と本体側面の定格名板を点検し、製品がご注文通りである
か、また損傷がないかの確認をしてください。
ドライブユニット形名
FR - E720EX - 0.75 K
記号
電圧クラス
E720EX
3相200Vクラス
ドライブユニット容量
[kW]を表す
操作パネル
(44ページ参照)
PUコネクタ
(17ページ参照)
電圧/電流入力切換スイッチ
USBコネクタ
(ミニBコネクタ)
(16ページ参照)
USBコネクタカバー
表面カバー
内蔵オプション
接続用コネクタ
(オプション取扱説明書
参照)
(5ページ参照)
PUコネクタカバー
(22ページ参照)
制御回路端子台
(16ページ参照)
制御ロジック切換
ジャンパコネクタ
(18ページ参照)
主回路端子台
FR-E720EX-0.75Kの例
(13ページ参照)
くし形配線カバー
容量名板
FR-E720EX-0.75K
(5ページ参照)
ドライブユニット形名
製造番号
定格名板
ドライブユニット形名
入力定格
出力定格
FR-E720EX-0.75K
容量名板、定格名板の位置は外形寸法図で確認してください。
(270ページ参照)
製造番号
SERIAL(製造番号)の見方
ドライブユニットの定格名板もしくは梱包箱に記載されているSERIAL(製造番号)を確認してください。
定格名板例
□ ○
記号 年
○ ○○○○○○
月
管理番号 SERIAL( 製造番号 )
SERIALは、記号1文字と製造年月2文字、管理番号6文字で構成されています。
製造年は、西暦の末尾1桁、製造月は、1∼9(月)、X(10月)、Y(11月)、Z(12月)で表します。
2
製造年月
ドライブユニットと周辺機器
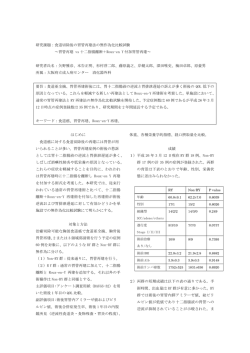
1.2 ドライブユニットと周辺機器
交流電源
ドライブユニットの許容電源仕様内で使用してく
ださい。
安全のため、
電源のON、
OFFはノーヒューズブレーカ
や漏電ブレーカ、
電磁接触器で行ってください。
(268ページ参照)
ノーヒューズブレーカ(NFB)または
漏電ブレーカ(ELB)、ヒューズ
ドライブユニットは電源投入時に突入電流
が流れるため、ブレーカの選定は注意が必
要です。
USBコネクタ
盤面操作パネル
(FR-PA07)
PUコネクタに接続ケーブル
(FR-CB2)
を接
続することによって、
FR-PU07、
FR-PA07か
パラメータユニット ら運転を行うことができます。
(FR-PU07)
USB(Ver1.1)ケーブルで
パソコンとドライブユニット
が接続できます。
(22ページ参照)
(4ページ参照)
電磁接触器(MC)
安全確保のために設置してください。こ
の電磁接触器でドライブユニットの始動
停止は行わないでください。ドライブユ
ニット寿命低下の原因になります。
ブレーキ抵抗器
(FR-ABR、MRS形)
(37ページ参照)
制動能力を向上させることが
できます。
(0.4K以上)
リアクトル(FR-HAL、FR-HEL オプション)
高調波抑制対策、力率の改善および大容量
電源直下(500kVA以上)
に設置を行う場合
リアクトル(オプション)の使用が必要と
なります。使用を怠るとドライブユニット
が破損する場合があります。機種に合わせ
てリアクトルを選定してください。DCリア
クトル接続時は、端子P/+−P1間の短絡片
を取り外して接続してください。
ACリアクトル(FR-HAL)
(24ページ参照)
P/+
PR
U VW
ノイズフィルタ
(FR-BSF01、FR-BLF)
DCリアクトル(FR-HEL)*
ドライブユニット
(FREQROL-E700EX)
ノイズフィルタ*
(FR-BSF01、
FR-BLF)
ドライブユニットから発生する電磁
ノイズを低減させる場合に
適用してください。
おおよそ1MHz∼10MHzの
周波数帯で効果があります。
電線の貫通回数は最大でも
4Tとしてください。
接地
P/+ P1
ドライブユニットから発生
する電磁ノイズを低減させ
る場合に適用してください。
おおよそ1MHz∼10MHzの
周波数帯で効果があります。
電線の貫通回数は多いほど
効果があります、合計の貫通
回数が4T以上となるように
してください。
開閉器
例)ノーヒューズスイッチ
(DSN形)
R/L1 S/L2 T/L3
ラジオノイズ
フィルタ*
(FR-BIF)
ドライブユニットの電源を切っ
た状態でもPMモータが負荷に回
される用途の場合接続します。
ドライブユニット運転中
(出力中)
に開閉器を開閉しないでください。
P/+ N/-
ラジオノイズを
低減します。
*DCリアクトルとノイズフィルタをワンパッケージにしたフィルタパック(FR-BFP2)
も用意しています。
電源ケーブル
(サーボモータ電源ケーブル(オプション))
モータ(MM-GKR)
出力側の接続機器
高力率コンバータ
(FR-HC2)
電源高調波を大幅に抑制
します。必要に応じて
設置してください。
電源回生共通コンバータ
(FR-CV)
ブレーキユニット
(FR-BU2)
大きな制動能力が得られます。 ドライブユニットの回生制動
必要に応じて設置してください。 能力を十分に発揮させること
ができます。
必要に応じて設置
してください。
進相コンデンサ・サージキラー・ラジオノイズフィルタは
出力側に接続しないでください。
出力側にノーヒューズブレーカを設置する場合、
ノーヒュ
ーズブレーカの選定は各メーカへお問い合せください。
接 地
感電防止のために、
モータおよびドライブユニットは必ず
接地して使用してください。
ドライブユニットの動力線か
らの誘導ノイズ対策としての接地配線は、
ドライブユニッ
トの接地端子まで戻して配線することを推奨します。
3
1
概
要
ドライブユニットと周辺機器
注 記
ドライブユニットの寿命は周囲温度に影響されます。周囲温度に注意してください。盤内収納のときは特に注意してくださ
い。(6ページ参照)
誤った配線は、ドライブユニット破損にいたります。また、制御信号線は主回路線と十分に分離し、ノイズの影響を受けな
いようにすることが大切です。(12ページ参照)
ドライブユニットの出力側には進相コンデンサやサージキラー、ラジオノイズフィルタを取り付けないでください。ドライ
ブユニットトリップやコンデンサ、サージキラーの破損を引き起こします。接続されている場合は取り外してください。
電波障害について
ドライブユニットの入出力(主回路)には高周波成分を含んでおり、ドライブユニットの近くで使用される通信機器(AMラジオ
など)に電波障害を与える場合があります。この場合にはオプションのラジオノイズフィルタFR-BIF(入力側専用)、ラインノ
イズフィルタFR-BSF01、FR-BLF、またはフィルタパック、EMCフィルタを取り付けることによって障害を小さくすること
ができます。(32ページ参照)
周辺機器の詳細は各オプション、周辺機器の取扱説明書を参照してください。
PMモータは商用電源による運転はできません。
PMモータは磁石モータのため、ドライブユニットの電源を切った状態でもモータが回っている間は、モータの端子には高電
圧が発生しています。出力側の開閉器を閉じる場合は、ドライブユニットの電源ON時にモータが停止した状態で行ってくだ
さい。
ドライブユニットの出力側に電磁接触器は使用しないでください。
1.2.1
周辺機器の紹介
お客様の購入されたドライブユニットの形名を確認してください。各容量に応じて適切な周辺機器の選定が必要です。
下表を参照して、適切な周辺機器を用意してください。
モータ
適用ドライブユニット形名
出力
(kW)
FR-E720EX-0.1K
FR-E720EX-0.2K
FR-E720EX-0.4K
FR-E720EX-0.75K
0.1
0.2
0.4
0.75
ノーヒューズブレーカ(NFB)
または漏電ブレーカ(ELB)(NF、NV形)
リアクトル接続
無
有
5A
5A
5A
10A
5A
5A
5A
10A
電磁接触器(MC)
リアクトル接続
無
有
S-N10
S-N10
S-N10
S-N10
FR-HAL
FR-HEL
0.4K
0.4K
0.4K
0.75K
0.4K
0.4K
0.4K
0.75K
NFBの形名は、電源設備容量に合わせて選定してください。
ドライブユニット1台ごとに、NFB1台を設置してください。
S-N10
S-N10
S-N10
S-N10
リアクトル
NFB
ドライブユニット
モータ
NFB
ドライブユニット
モータ
アメリカ合衆国およびカナダで使用する場合は、分岐線保護用のクラス T ヒューズ以上の遮断速度
を持つ適切な定格のUL、cUL認定ヒューズ、もしくはUL489 配線用遮断器(MCCB)を選定してく
取扱説明書(基礎編)参照)
ださい。(
電磁接触器はAC-1級で選定しています。電磁接触器の電気的耐久性は、50万回です。モータ駆動中の非常停止にご使用の場合は、25回となります。
モータ駆動中に非常停止としてご使用される場合は、ドライブユニットの入力電流に対し、JEM1038-AC-3級定格使用電流で選定してください。
力率は若干下回ることがあります。
注 記
ドライブユニット1次側のブレーカがトリップした場合は、配線の異常(短絡など)、ドライブユニット内部部品の破損などが
考えられます。ブレーカがトリップした原因を特定し、原因を取り除いたうえで再度ブレーカを投入してください。
4
カバーの取外しと取付け方
1.3 カバーの取外しと取付け方
1.3.1
表面カバー
取外し(FR-E720EX-0.75Kの例)
矢印部分を手前方向へ引いて取り外してください。
取付け(FR-E720EX-0.75Kの例)
取り付ける場合は、本体の正面にカバーを合わせて真っ直ぐに取り付けてください。
1
概
要
注 記
表面カバーが確実に取り付けられたか十分に確認してください。
表面カバーには容量名板、本体には定格名板が貼り付けられています。それぞれに同一の製造番号が捺印してありますので
取り外したカバーは必ず元のドライブユニットに取り付けてください。
1.3.2
配線カバー
取外しと取付け
手前方向に引くと簡単に外せます。取り付ける場合は、ガイドに合わせて本体に取り付けてください。
ガイド
配線カバー
FR-E720EX-0.75Kの例
5
ドライブユニットの据付けと盤設計
1.4 ドライブユニットの据付けと盤設計
ドライブユニット盤の設計、製作にあたっては内蔵される機器類の発熱、使用場所の環境などを十分考慮して、盤の構造、
寸法、機器配置を決めなければなりません。ユニットには多くの半導体素子が使用されています。より信頼性を高め、長時
間に渡ってご使用いただくためには、機器仕様を十分満足した周囲環境のところでご使用ください。
1.4.1
ドライブユニットの設置環境
ドライブユニットの設置環境は下表に示す標準仕様のため、この条件を超える場所での使用は性能、寿命の低下をきたすだ
けではなく故障の原因となりますので、以下に述べる要点を参照の上、十分な対策を施してください。
ドライブユニットの耐環境標準仕様
項 目
−10∼+50℃(凍結のないこと)
周囲湿度
90%RH以下(結露のないこと)
雰囲気
(1)
内 容
周囲温度
腐食性、爆発性ガスのないこと 塵埃のないこと
標高
1000m以下
振動
5.9m/s2以下、10∼55Hz(X、Y、Z各方向)
温度
ドライブユニットの許容周囲温度は−10∼+50℃ですのでこの温度範囲で必ず使用してください。この範囲をこえての使用
は半導体、部品、コンデンサなどの寿命を著しく低下させます。次のような対策を施し、ドライブユニットの周囲温度が規
定値内になるようにしてください。
1) 高温対策
強制換気方式などの冷却方式を採用する。(8ページ参照)
空調してある電気室に盤を設置する。
直射日光をさえぎる。
熱源の輻射熱、温風が直接あたらないように遮蔽板などを設ける。
盤周辺の通気をよくする。
2) 低温対策
盤内にスペースヒータを設ける。
ドライブユニットの電源を切らない。(ドライブユニットの始動信号は切っておく)
3) 急激な温度変化
急激な温度変化のない場所を選んで設置する。
空調設備の吹出し口の近くをさける。
ドアの開閉によるものであればドアから離して設置する。
(2)
湿度
ドライブユニットの使用周囲湿度は通常45∼90%の範囲で使用してください。湿度が高すぎると絶縁の低下および金属部の
腐食の問題が発生します。一方、湿度が低すぎると空間絶縁破壊が生じることがあります。JEM1103「制御機器の絶縁装
置」に規定している絶縁距離は湿度45∼85%とあります。
1) 高湿度対策
盤を密閉構造とし、吸湿剤を入れる。
乾燥空気を外部より盤内に吸込む。
盤内にスペースヒーターを設ける。
2) 低湿度対策
適度な湿度の空気を外部より盤内に吹込むなどの他に、この状態でユニットの装着や点検を行うときには、人体の
帯電(静電気)を放電した後に行い、かつ部品やパターンに触れないようにすることも重要な点です。
3) 結露対策
ひん度の高い運転停止により盤内の温度が急激に変化する場合や、外気温度の急激な変化がある場合には結露を生
じることがあります。
結露は絶縁低下や錆の発生などの不具合を起こします。
1)の高湿度対策を施す。
ドライブユニットの電源を切らない。(ドライブユニットの始動信号は切っておく)
6
ドライブユニットの据付けと盤設計
(3)
塵埃、オイルミスト
塵埃は接触部の接触不良、たい積による吸湿での絶縁低下、冷却効果の低下、フィルタ目づまりによる盤内温度上昇などの
不具合を生じます。また導電性の粉末の浮遊する雰囲気では、誤動作、絶縁劣化や短絡などの不具合が短時間で発生します。
オイルミストの場合も同様な状況を生じますので十分な対策を施すことが必要です。
対策
密閉構造の盤に収納する。
盤内の温度が上昇する場合には対策を施す。(8ページ参照)
エアーパージを行う。
盤内の内圧が外気より高くなるように外部より、清浄空気を圧送する。
(4)
腐食性ガス、塩害
腐食性ガスのある場所および海岸近くで塩害を受けやすい場所への設置は、プリント基板のパターンや部品の腐食、リレー、
スイッチ部の接触不良を生じます。
このような場所での対策は、(3)項の対策を施します。
(5)
爆発性、可燃性ガス
ドライブユニットは非防爆構造のため、必ず防爆構造の盤に収納しなければなりません。爆発性ガス、粉塵により爆発のお
それのある場所での使用は法令の基準指針に構造的に適合し、検定に合格したものでなければ使用できないことになってい
るため収納盤自体が高価(受検料も含む)になります。これらの場所での設置は避け、非危険場所に設置することが最良の方
法といえます。
(6)
高地
1
ドライブユニットは標高1000m以下で使用してください。これは高度が高くなると空気の希薄による冷却効果の低下、気圧
の低下による絶縁耐力の劣化が生じやすくなるためです。
(7)
振動、衝撃
ドライブユニットの振動耐力は、X、Y、Z各方向、振動10∼55Hz、振幅1mmで加速度5.9m/s2までです。振動、衝撃が規
定値以下でも長時間加えられると、機構部のゆるみ、コネクタの接触不良などが発生することがあります。
特に繰返し衝撃が加わる場合は部品取付け足の折損事故などがおこりやすいので注意が必要です。
対策
盤に防振ゴムを設ける。
盤が共振しないよう構造を強化する。
振動源から盤を離して設置する。
7
概
要
ドライブユニットの据付けと盤設計
1.4.2
ドライブユニット盤の冷却方式の種類
ドライブユニットを収納する盤は、ドライブユニットおよびドライブユニット以外の機器(トランス、ランプ、抵抗器、その
他)の発熱と直射日光など外部から入ってくる熱を効率よく放熱させて、その盤内温度をドライブユニットを含む盤内機器の
許容温度以下に保つ必要があります。
冷却の計算方法からみて冷却方式を分類すると次のようになります。
1) 盤面からの自然放熱による冷却(全閉鎖形)
2) 放熱フィンによる冷却(アルミフィンなど)
3) 換気による冷却(強制通風形、管通風形)
4) 熱交換器や冷却器による冷却(ヒートパイプ、クーラなど)
冷却方式
盤構造
コメント
コストが安く一般的であるが、ドライブユニット容量が大き
自然換気(閉鎖、開放形)
ドライブ
ユニット
くなると、盤寸法も大きくなる。比較的小容量向き。
自然冷却
全閉鎖形のため、塵埃、オイルミストなどの悪環境には最適。
自然換気(全閉鎖形)
ドライブ
ユニット
ドライブユニット容量によっては盤寸法が大きくなる。
フィン
フィン冷却
強制冷却
強制換気
ドライブ
ユニット
フィンの取付け場所、面積の制約もあり、比較的小容量向き。
一般的な室内設置用。盤の小形化、低コスト化に向いており
ドライブ
ユニット
よく使用される方式。
ヒート
パイプ
ヒートパイプ
8
ドライブ
ユニット
全閉鎖形で盤の小形化が可能。
ドライブユニットの据付けと盤設計
1.4.3
(1)
ドライブユニットの配置
ドライブユニットの設置
盤面取付けの場合
表面カバーと配線カバーは取り外してから固定します。
表面カバー
配線カバー
注 記
複数台収納する場合は、並列に据え付けて冷却対策を行ってください。
ドライブユニットは垂直に取り付けてください。
垂
直
下 図周囲ス
(2)
1
ペース参照
ドライブユニット周囲の隙間
ドライブユニットの周囲は放熱、保守のため少なくとも下図の寸法以上に、他の機器または盤の壁面と離してください。ド
ライブユニットの下部は配線スペースとして、ドライブユニットの上部は放熱用スペースとして最小下記寸法が必要です。
周囲温度と湿度
5cm
ドライブ
ユニット
周囲スペースの確保(正面)
測定位置
5cm
5cm
周囲スペースの確保(側面)
10cm以上
1cm
以上*
1cm
以上*
1cm
測定位置
ドライブ
ユニット
以上
温度:-10℃∼+50℃
湿度:90%RH以下
十分なスペースを確保して冷却
対策を行ってください。
(3)
10cm以上
* 周囲温度40℃以下で使用する場
合は密着取付け(間隔0cm)で
きます。周囲温度が40℃を超え
る場合、ドライブユニット横方
向周囲スペースは1cm以上必要
です。
ドライブユニットの取付け方向
ドライブユニットは壁面に正規の取付けをしてください。水平、その他の取付けはしないでください。
9
概
要
ドライブユニットの据付けと盤設計
(4)
ドライブユニットを複数台収納する場合
同一盤内に複数台のドライブユニットを収納する場合、
通常右図(a)のように横に並べてください。盤のスペース
を少なくするために、やむをえず縦に並べる場合、下部
ドライブ
ユニット
ドライブ
ユニット
ドライブ
ユニット
で、ガイドを設けるなどの対策をしてください。
ガイド
ガイド
また、複数台収納する場合、ドライブユニットの周囲温
度が許容値をこえないよう、換気、通風および盤サイズ
ドライブ
ユニット
ドライブ
ユニット
のドライブユニットの熱で上部ドライブユニット内の温
度が上昇し、ドライブユニット故障の原因になりますの
ドライブ
ユニット
ガイド
を大きくするなど十分に注意してください。
制御盤
制御盤
(a)横に並べる場合
(b)縦に並べる場合
ドライブユニット複数台収納
(5)
換気ファンとドライブユニットの配置
ドライブユニット内で発生した熱は冷却ファンにより温風と
なってユニットの下部から上部へと流れます。その熱の換気に
ファンを取り付ける場合、風の流れを十分考慮の上、換気ファ
ンの設置場所を決めてください。(風の流れは抵抗の少ないと
ころを通ります。ドライブユニットに冷風があたるように風道
や整流板を作ってください)
ドライブ
ユニット
<良い例>
ドライブ
ユニット
<悪い例>
換気ファンとドライブユニットの配置
10
2
配 線
この章では、本製品をお使いいただく上での基本的な「配線」に
ついて説明しています。
注意事項など必ず一読してからご使用ください。
2.1
2.2
2.3
2.4
1
配線について ........................................................................................ 12
主回路端子仕様..................................................................................... 13
制御回路仕様 ........................................................................................ 16
別置形オプションユニットとの接続.................................................. 24
2
3
4
5
6
7
11
配線について
2.1 配線について
端子結線図(速度制御)
シンクロジック
主回路端子
制御回路端子
*1. DCリアクトル(FR-HEL)
DCリアクトルを接続する場合、P1-P/+間の短
絡片を外してください。
ブレーキユニット
(オプション)
*1
R
PR
短絡片
NFB
P1
MC
R/L1
S/L2
T/L3
3相交流電源
*7 ブレーキ抵抗器(FR-ABR、MRS形)
ブレーキ抵抗器の過熱・焼損を防ぐため、
サーマルリレーを設置してください。
(0.1K、0.2Kはブレーキ抵抗器の接続は
できません。)
*7
接地
P/+
*6 0.1K、0.2Kはブレーキトランジスタを内
蔵していません。
N/*6
U
V
W
突入電流
抑制回路
PM
モータ
接地
主回路
接地
制御回路
標準制御端子台
制御入力信号(電圧入力は不可)
C
STF
正転始動
B
STR
逆転始動
A
高速
多段速度選択
MRS
リセット
SD
DC24V電源
(外部電源トランジスタコモン)
速度設定信号(アナログ)
*4 速度設定変更の頻度が高
いときは2W1kを推奨し
ます。
運転中
FU
出力停止
RES
速度
設定器
1/2W1k
*4
SE
24V
PC *2
速度検出
オープンコレクタ出力コモン
シンク・ソース共通
目盛校正
抵抗器
+
10(+5V)
3
出力端子割付(Pr.190、
Pr.191)によって端子機
能変更可能です。
RUN
RL
低速
接点入力コモン
*3 アナログ入力仕様切換
(Pr.73)によって変更
可能です。
オープンコレクタ出力
RM
中速
SINK
*2 端子PC-SD間をDC24V
電源として使用する場
合は、両端子間が短絡
しないよう注意してく
ださい。
Pr.192 ABC端子機能選択
リレー出力 によって端子機能変更可
(異常出力) 能です。
RH
SOURCE
入力端子割付(Pr.178∼
Pr.184)によって端子機
能変更可能です。
リレー出力
FM
*8
2
1
端子4入力 (+)
(電流入力)(-)
*5 アナログ入力仕様切換(Pr.267)によって変更可能です。
電圧入力(0∼5V/0∼10V)にする場合は、電圧/電流入力
切換スイッチを"V"、電流入力(4∼20mA)にする場合は、
"I"(初期値)"にしてください。
端子4(初期設定:電流入力)を使用する場合は、Pr.178∼
Pr.184(入力端子機能選択)のいずれかに“4”を設定して
機能を割り付けて、AU信号をONしてください。
4 DC4∼20mA
DC0∼5V *5
DC0∼10V
I
PU
コネクタ
*9
V
電圧/電流入力切換
スイッチ
*5
可動コイル形
1mAフルスケール
SD
2 DC0∼5V *3
(DC0∼10V)
5(アナログ
コモン)
− 表示計(速度計など)
USB
コネクタ
*8 操作パネルで目盛校正
するときは不要です。
*9 パラメータユニット(FR-PU07)や盤面操作
パネル(FR-PA07)からの運転や、パラメ
ータ設定ができます。(オプションの接
続ケーブル(FR-CB2□□)を使用してく
ださい。)
また、パソコンなどからRS-485通信運転
を行うことができます。
*10 USB(Ver1.1)ケーブルでパソコンとドラ
イブユニットが接続できます。
*10
内蔵オプション
接続用コネクタ
オプションコネクタ
注 記
位置制御時の端子結線図は78 ページ を参照してください。
ノイズによる誤動作を防止するため、信号線は動力線と 10cm 以上離してください。また、主回路配線の入力側と出力側は分
離してください。
配線時にドライブユニット内部に電線の切りくずを残さないでください。
電線の切りくずは、異常、故障、誤動作の原因になります。ドライブユニットはいつもきれいにしておいてください。制御
盤などに取付け穴をあけるときは、切粉などがドライブユニットに入らないよう注意してください。
12
主回路端子仕様
2.2 主回路端子仕様
2.2.1
主回路端子の仕様
端子記号
端子名称
端子機能説明
R/L1、
商用電源に接続します。
S/L2、
T/L3
交流電源入力
高力率コンバータ(FR-HC2)および電源回生共通コンバータ(FR-CV)を使用すると
U、V、W
ドライブユニット出力
PMモータを接続します。
P/+、PR
ブレーキ抵抗器接続
P/+、N/-
ブレーキユニット接続
P/+、P1
DCリアクトル接続
端子P/+-P1間の短絡片を外し、DCリアクトルを接続します。
接地
ドライブユニットシャーシの接地用。大地接地してください。
2.2.2
きには何も接続しないでください。
端子P/+-PR間にオプションのブレーキ抵抗器(FR-ABR、MRS形)を接続します。
(0.1K、0.2Kには接続できません。)
ブレーキユニット(FR-BU2)、電源回生共通コンバータ(FR-CV)および高力率コン
バータ(FR-HC2)を接続します。
主回路端子の端子配列と電源、モータの配線
3相200Vクラス
FR-E720EX-0.1K∼0.75K
短絡片
N/-
P/+
PR
R/L1 S/L2 T/L3
M
電源
モータ
2
注 記
電源線は必ずR/L1、S/L2、T/L3に接続します。(相順を合わせる必要はありません。)U、V、Wに接続するとドライブユニッ
トが破損しますので絶対に避けてください。
モータはU、V、Wに接続します。このとき、正転スイッチ(信号)を入れるとモータ軸の回転方向は負荷軸より見て反時計方
向となります。
13
配
線
主回路端子仕様
2.2.3
(1)
電線、配線長など
適用電線サイズ
電圧降下が2%以下となるように推奨の電線サイズを選定してください。
ドライブユニットとモータ間の配線距離が長い場合は、特に低速度出力時、主回路ケーブルの電圧降下によりモータのトル
クが低下します。
配線長が20mの場合の選定例を下記に示します。
3相200Vクラス(220V受電の場合)
圧着端子
適用ドライブユニット
形名
FR-E720EX-0.1K∼0.75K
電線サイズ
AWG
締付け
PVC電線など(mm2)
端子ねじ
トルク R/L1、
R/L1、
R/L1、
R/L1、
サイズ
N・m S/L2、 U、V、W S/L2、 U、V、W 接地線 S/L2、 U、V、W S/L2、 U、V、W 接地線
T/L3
T/L3
T/L3
T/L3
M3.5
1.2
1.25-
2-3.5
3.5
HIV電線など(mm2)
2
─
()
2
14
─
()
2.5
─
()
2.5
連続最高許容温度75℃の電線(HIV電線(600V二種ビニル絶縁電線)など)のサイズです。周囲温度50℃以下、配線距離は20m以下を想定しています。
連続最高許容温度75℃の電線(THHW電線)のサイズです。周囲温度40℃以下、配線距離は20m以下を想定しています。
(主にアメリカ合衆国で使用する場合の選定例です。)
連続最高許容温度70℃の電線(PVC電線)のサイズです。周囲温度40℃以下、配線距離は20m以下を想定しています。
(主に欧州で使用する場合の選定例です。)
端子ねじサイズは、R/L1、S/L2、T/L3、U、V、W、PR、P/+、N/-、P1、接地用ねじサイズを示します。
MM-GKRシリーズモータ用電源ケーブル(MR-PWS1CBLM-A-)使用の場合は、0.75mm2(AWG19またはAWG18)となります。
注 記
端子ねじは規定トルクで締め付けてください。締付けが緩いと、短絡・誤動作の原因になります。締め過ぎると、ねじやユ
ニットの破損による短絡・誤動作の原因になります。
電源およびモータ配線の圧着端子は絶縁スリーブ付のものを推奨します。
備 考
600V二種ビニル絶縁電線 (HIV電線) を使用し、配線長30mを基準にした場合の選定例を下記に示します。
MM-GKRシリーズ対応電源コネクタ
モータ形名
電源、接地用 (U、V、W、
MM-GKR13、23、43、73
) (一般環境)電線サイズ(mm2)
0.75(AWG 18)
2
モータ電源コネクタへの配線には、0.75mm (AWG 18)のフッ素樹脂電線を使用してください。
配線長10m以下の場合です。10mを超える場合は、MR-PWS2CBL03M-A_-Lおよび1.25mm2(AWG 16)のHIV電線を使用
して延長してください。
UL/CSA規格に対応する場合、MR-PWS2CBL03M-A_-Lおよび2mm2(AWG 14)のHIV電線を使用して延長してください。
線間電圧降下は次式で算出できます。
3×電線抵抗[mΩ/m]×配線距離[m]×電流[A]
1000
配線距離が長い場合や低速側での電圧降下(トルク減少)を少なくしたい場合は太い電線径をご使用ください。
線間電圧降下[V]=
14
主回路端子仕様
(2)
接地のお願い
モータおよびドライブユニットは必ず接地してください。
1)接地の目的
電気機器には一般的に接地端子が付いており、必ずこれを大地に接続して使用することになっています。
電気回路は、通常、絶縁物で絶縁されてケースに収納されています。しかし、完全に漏れ電流を遮断できる絶縁物を製
作することは不可能であり、現実には僅かながらケースに電流が漏れることになります。人が電気機器のケースに触れ
たときに、この漏れ電流によって感電しないように、ケースを接地するのが接地の目的です。
オーディオ、センサ、コンピュータなどのように、微弱な信号を扱うか、非常に高速で動作している機器においては、
外来ノイズの影響を受けないようにするためにも、この接地が重要となります。
2)接地方法と接地工事
接地には、前述のように大別して感電防止のものとノイズによる誤動作防止のものがあります。したがって、この両者
の接地を明確に区別し、誤動作防止のための接地にドライブユニットの高周波成分の漏れ電流が侵入しないよう、下記
のように処理する必要があります。
(a)ドライブユニットの接地はできるだけ専用接地とします。
専用接地(Ⅰ)がとれないときは、接地点で他の機器と接続される共用接地(Ⅱ)とします。(Ⅲ)のように他の機器と接
地線を共通した接地は避けなければなりません。
また、ドライブユニットおよびドライブユニットで駆動されるモータの接地線には高周波成分の多い漏れ電流が流
れますので、前述のノイズに敏感な機器の接地とは分離して専用接地とする必要があります。
高層ビルにおいては、ノイズ誤動作防止用の接地を鉄骨に、感電防止用の接地を専用接地とするのも良策と考えら
れます。
(b)接地工事は、D種接地(接地抵抗100以下)で行います。
(c)接地線はできるだけ太い線を使用します。接地線のサイズは14ページ に示すサイズ以上のものを使用します。
(d)接地点はできるだけドライブユニットの近くとし、接地線は極力短くします。
(e)接地線の布線は、ノイズに敏感な機器の入出力配線からできるだけ離し、かつ平行する距離を極力短くします。
ドライブ
ユニット
他の機器
ドライブ
ユニット
ドライブ
ユニット
他の機器
D 種接地
他の機器
2
D 種接地
D 種接地
(Ⅰ)専用接地・・・最良
(Ⅱ)共用接地・・・良
配
線
(Ⅲ)共通接地・・・不可
ポイント
欧州指令(低電圧指令)対応としてお使いになる場合、
(3)
取扱説明書(基礎編) を参照してください。
配線長
PMモータは30m以内の配線長で使用してください。
ドライブユニットと専用PMモータは、1対1で接続してください。複数台のPMモータを接続することはできません。
15
制御回路仕様
2.3 制御回路仕様
2.3.1
制御回路端子について
はPr.178∼Pr.184、Pr.190∼Pr.192(入出力端子機能選択) により、端子機能を選択できます。(120ページ参照)
(1)
入力信号(速度制御)
種 端子
類 記号
端子名称
端子機能説明
正転始動
STF信号ONで正転、OFFで
停止指令となります。
STF、STR信号が同時にON
STR 逆転始動
STR信号ONで逆転、OFFで
停止指令となります。
す。
STF
RH、
RM、 多段速度選択
RL
MRS 出力停止
接 RES リセット
点
入
接点入力コモン(シンク)
力
(初期設定)
SD
外部トランジスタコモン
(ソース)
DC24V電源コモン
外部トランジスタコモン
PC
(シンク)(初期設定)
接点入力コモン(ソース)
定格仕様
参照
ページ
124
すると、停止指令になりま
RH、RM、RL信号の組合わせにより、多段速度の選択ができ
入力抵抗4.7k
ます。
開放時電圧
MRS信号ON(20ms以上)でドライブユニットの出力が停止し
DC21∼26V
ます。
短絡時
モータを電磁ブレーキで停止するときドライブユニットの出
DC4∼6mA
力を遮断するために使用します。
保護回路動作時のアラーム出力をリセットするときに使用し
ます。RES信号を0.1s以上ONした後、OFFしてください。
初期設定で、常時リセット可能です。Pr.75 の設定により、ド
ライブユニットアラーム発生時のみリセットが可能になりま
す。リセット解除後約1sで復帰します。
100
122
157
接点入力端子(シンクロジック)および端子FMのコモン端子。
ソースロジック時にシーケンサなどのトランジスタ出力
(オープンコレクタ出力)を接続するときには、トランジスタ
出力用の外部電源コモンをこの端子に接続すると回り込み電
流による誤動作を防止することができます。
―――
――
DC24V 0.1A電源(端子PC)のコモン出力端子。
端子5および端子SEとは絶縁されています。
シンクロジック時にシーケンサなどのトランジスタ出力
(オープンコレクタ出力)を接続するときには、トランジスタ
電源電圧範囲
出力用の外部電源コモンをこの端子に接続すると回り込み電
DC22∼26.5V
流による誤動作を防止することができます。
許容負荷電流100mA
接点入力端子(ソースロジック)のコモン端子。
18
DC24V電源
DC24V、0.1Aの電源として使用することが可能です。
10
速度設定用電源
速度設定用ボリュームを外部接続する場合の電源として使用 DC5.2V0.2V
します。(Pr.73 アナログ入力選択 参照)
許容負荷電流10mA
147
2
速度設定(電圧)
DC0∼5V(または0∼10V)を入力すると5V(10V)で最大回
入力抵抗10k1k
転速度となり、入出力は比例します。入力DC0∼5V(初期設
最大許容電圧DC20V
定)とDC0∼10Vの切換えは、Pr.73 で行います。
147
速度設定(電流)
DC4∼20mA(または0∼5V、0∼10V)を入力すると20mA
で最大回転速度となり、入出力は比例します。AU信号ONの
ときのみ端子4の入力信号が有効になります(端子2入力は無
効になります)。
端子4(初期設定:電流入力)を使用する場合は、Pr.178∼
Pr.184 (入力端子機能選択) のいずれかに“4”を設定して機
能を割り付けて、AU信号をONしてください。
入力4∼20mA(初期設定)とDC0∼
電流入力
(初期状態)
電圧入力
5V、DC0∼10Vの切換えは、
Pr.267 で行います。電圧入力(0∼
I
V I
V
5V/0∼10V)にする場合は、電圧/
電流入力切換スイッチを“V”に切り換えてください。
147
速
度
設
定 4
5
速度設定コモン
速度設定信号(端子2または4)のコモン端子。大地接地はし
ないでください。
電流入力の場合:
入力抵抗2335
最大許容電流30mA
電圧入力の場合:
入力抵抗10k 1k
最大許容電圧DC20V
―――
――
注 記
位置制御時には機能が異なる端子があります。(78 ページ 参照)
Pr.267 と電圧/電流入力切換スイッチを正しく設定し、設定に合ったアナログ信号を入力してください。
電圧/電流入力切換スイッチを“I”(電流入力仕様)にして電圧入力、スイッチを“V”(電圧入力仕様)にして電流入力をした
場合、ドライブユニットまたは、外部機器のアナログ回路の故障の原因になります。(詳細は147ページ参照)
16
制御回路仕様
(2)
出力信号
種 端子
端子名称
類 記号
リ
レ
|
A、B、
C
リレー出力(異常出力)
オ
| RUN ドライブユニット運転中
プ
ン
コ FU
速度検出
レ
ク
タ
パ
SE
ル FM
オープンコレクタ出力コ
モン
表示計用
ス
(3)
類 記号
U
S
B
ドライブユニットの保護機能が動作し出力が停止したことを
示す1c接点出力。
異常時:B-C間不導通(A-C間導通)、正常時:B-C間導通
(A-C間不導通)
回転速度が始動速度以上でLレ Lレベルとは、オープン
ベル、停止中および直流制動中
コレクタ出力用のトラン
はHレベルとなります。
ジスタがON(導通状態)
となることを示します。
回転速度が任意に設定した検出
Hレベルとは、OFF(不
速度以上になるとLレベル、未
導通状態)となることを
満でHレベルとなります。
示します。
定格仕様
参照
ページ
接点容量AC230V 0.3A
(力率=0.4)
126
DC30V 0.3A
許容負荷DC24V
126
(最大DC27V) 0.1A
(ON時最大電圧降下
130
3.4V)
端子RUN、FUのコモン端子。
―――
回転速度など複数のモニタ項目から一つを選び出力します。 許容負荷電流1mA
出力項目:回転速度(初期設定)
ドライブユニットリセット中には出力されません。
出力信号は各モニタ項目の大きさに比例します。
3000r/min時1440パルス/s
――
135
通信
種 端子
R
S
|
4
8
5
端子機能説明
端子名称
端子機能説明
参照
ページ
―― PUコネクタ
PUコネクタよりRS-485通信を行うことができます。
準拠規格:EIA-485(RS-485)
伝送形態:マルチドロップリンク方式
通信速度:4800∼38400bps
総延長 :500m
179
―― USBコネクタ
パソコンとUSBの接続ができます。
インタフェース:USB1.1準拠
転送速度:12Mbps
コネクタ:USB ミニBコネクタ(レセプタクル ミニBタイプ)
――
2
配
線
17
制御回路仕様
2.3.2
制御ロジック切換え
入力信号の出荷時ロジックは、シンクロジック(SINK)になっています。
制御ロジックを切り換えるためには、制御端子上側のジャンパコネクタを切り換える必要があります。
シンクロジック (SINK) にあるジャンパコネクタをピンセットやラジオペンチなどを使用してソースロジック (SOURCE)
に差し換えてください。ジャンパコネクタの差し換えは、通電する前に行ってください。
注 記
表面カバーが確実に取り付けられたか十分に確認してください。
表面カバーには容量名板、本体には定格名板が刻印してあります。それぞれに同一の製造番号が捺印してありますので取り
外したカバーは必ず元のドライブユニットに取り付けてください。
シンク、ソースロジックの切換えジャンパコネクタは、必ずどちらか一方のみ取り付けてください。両方に同時に取り付け
ると、ドライブユニットが破損する場合があります。
(1) シンクロジックタイプとソースロジックタイプ
シンクロジックタイプは信号入力端子から電流が流れ出ることにより信号ONとなるロジックです。
接点入力信号は、端子SDがコモン端子となります。オープンコレクタ出力信号は端子SEがコモン端子となります。
ソースロジックタイプは信号入力端子に電流が流れ込むことにより信号ONとなるロジックです。
接点入力信号は、端子PCがコモン端子となります。オープンコレクタ出力信号は端子SEがコモン端子となります。
シンクロジック選択時の入出力信号に関する電流の流れ
ソースロジック選択時の入出力信号に関する電流の流れ
ソースロジック
シンクロジック
PC
電流
STF
STR
シンク
コネクタ
R
R
電流
STF
STR
ソース
コネクタ
R
R
SD
ドライブユニット
RUN
DC入力(シンクタイプ)
<例:QX40>
TB1
DC入力(ソースタイプ)
<例:QX80>
ドライブユニット
RUN
R
TB1
R
R
SE
TB17
DC24V
電流の流れ
18
R
SE
TB18
DC24V
電流の流れ
制御回路仕様
トランジスタ出力用に外部電源を使用する場合
シンクロジックタイプ
ソースロジックタイプ
端子PCをコモン端子として下図のように配線してくださ
端子SDをコモン端子として下図のように配線してくださ
い。(ドライブユニットの端子SDは外部電源の0V端子と
は接続しないでください。また、端子PC-SD間をDC24V
い。(ドライブユニットの端子PCは外部電源の+24V端子
とは 接続 しな いで くだ さい。ま た、端子 PC-SD 間を
電源として使用する場合は、ドライブユニットの外部に並
列に電源を設置しないでください。回り込み電流による誤
DC24V電源として使用する場合は、ドライブユニットの
外部に並列に電源を設置しないでください。回り込み電流
動作が発生することがあります。)
による誤動作が発生することがあります。)
ドライブユニット
定電圧
回路
TB1
STF
TB2
STR
PC
DC24V
(SD)
TB17
PC
TB18
DC24V SD
電流の流れ
ドライブユニット
QY80形トランジスタ
出力ユニット
定電圧
回路
ヒューズ
TB1
STF
TB2
STR
TB17
TB18
DC24V
QY40P形トランジスタ
出力ユニット
DC24V
(SD)
SD
電流の流れ
2
配
線
19
制御回路仕様
2.3.3
制御回路の配線
端子配列
端子ねじサイズ
M3:(端子A、B、C)
M2:(上記以外)
10
2
5
4 RUN FU SE
FM RL RM RH MRS RES SD PC STF STR SD SD
A
B
C
配線方法
1) 制御回路の配線は、電線の被覆をむいてそのまま使用してください。
次の寸法で被覆をむいてください。むき長さが長すぎると隣の線と短絡の恐れがあります。短かすぎると線が抜け
る恐れがあります。
電線は、バラつかないように、よって配線処理をしてください。また、半田処理はしないでください。
電線被覆むきサイズ
L
L(mm)
端子A、B、C
6
上記以外
5
棒状端子の市販品例:(2012年2月時点)
フエニックス・コンタクト(株)
端子ねじサイズ
M3(端子A、B、C)
M2(上記以外)
電線サイズ
(mm2)
棒状端子形式
絶縁スリーブ付
絶縁スリーブなし
圧着工具
お問い合せ
CRIMPFOX 6
045-471-0030
お問い合せ
0.3、0.5
AI 0,5-6WH
A 0,5-6
0.75
AI 0,75-6GY
A 0,75-6
0.3、0.5
AI 0,5-6WH
A 0,5-6
棒状端子品番
キャップ品番
圧着工具
BT 0.75-7
VC 0.75
NH 69
電話番号は予告なしに変更される場合があります。
(株)ニチフ
端子ねじサイズ
M3(端子A、B、C)
M2(上記以外)
電線サイズ
(mm2)
0.3∼0.75
052-733-9880
(名古屋特機営業所)
電話番号は予告なしに変更される場合があります。
2) 端子ねじを緩め、端子に電線を差し込みます。
3) 規定の締付けトルクでネジ締めします。
締付けが緩いと、線抜け、誤動作の原因となります。締めすぎると、ネジやユニットの破損による短絡、誤動作の原因
となります。
締付けトルク:0.5N・m∼0.6N・m(端子A、B、C)
0.22N・m∼0.25N・m(上記以外)
ドライバ:小型 ねじ回し (刃先厚:0.4mm/刃先幅:2.5mm)
20
制御回路仕様
(1)
制御回路のコモン端子(SD、5、SE)
端子SD、SEおよび5は入出力信号のコモン端子です。(いずれのコモン端子も互いに絶縁されています。)このコモン端子は
大地接地しないでください。端子SD-5、端子SE-5となるような配線はしないでください。
端子SDは接点入力端子(STF、STR、RH、RM、RL、MRS、RES)およびパルス列出力信号(FM)のコモン端子です。オープンコ
レクタ回路と内部制御回路とはフォトカプラ絶縁されています。
端子5は速度設定信号(端子2または4)のコモン端子です。シールド線またはツイストを施して、外来ノイズを受けないよう
にしてください。
端子SEはオープンコレクタ出力端子(RUN、FU)のコモン端子です。接点入力回路と内部制御回路とはフォトカプラ絶縁され
ています。
(2)
無接点スイッチによる信号入力
ドライブユニットの接点入力端子(STF、STR、RH、
+24V
RM、RL、MRS、RES)は、有接点スイッチの代りに、
右図のようにトランジスタを接続して制御することも
できます。
STFなど
ドライブユニット
SD
トランジスタによる外部信号入力
(3)
配線時の注意事項
制御回路端子への接続線の電線サイズは0.3mm2∼0.75㎜2を推奨します。
配線長は30m(端子FMは、200m)以下で使用してください。
端子PCと端子SDを短絡しないでください。ドライブユニット故障の原因となることがあります。
2
制御回路の入力信号は微小電流のため接点を入れる場合には接触不良を防止す
るために微小信号用接点を2個以上並列か、またはツイン接点を使用してくださ
い。
微小信号用接点
ツイン接点
ノイズの影響を受けないよう、制御回路端子への接続線はシールド線またはツイスト線を使用し、かつ主回路、強電回路
(200Vリレーシーケンス回路を含む)と分離して配線することが必要です。制御回路端子のシールド線は、各端子のコモン
端子に接続してください。ただし、端子PCに外部電源を接続する場合、シールド線は、外部電源のマイナス側に接続して
ください。制御盤などに直接接地しないでください。
制御回路の接点入力端子(STFなど)には電圧を入力しないでください。
異常出力端子(A、B、C)には、リレーコイルやランプなどを必ず介してください。
21
配
線
制御回路仕様
2.3.4
PUコネクタへの接続
PUコネクタを使用することによって、パラメータユニット(FR-PU07)や盤面操作パネル(FR-PA07)からの運転や、パソコ
ンなどから通信運転を行うことができます。
PUコネクタカバーの開け方は下のイラストを参考にしてください。
PUコネクタ
カバーの開け方
マイナスドライバーなどを
くぼみに引っ掛けてカバー
を押し上げて開けてください。
接続ケーブルを使用してパラメータユニット、盤面操作パネルを接続する場合
オプションのFR-CB2、もしくは以下の市販コネクタ、ケーブルを使用してください。
接続ケーブルの一方をドライブユニットのPUコネクタ、もう一方をFR-PU07、FR-PA07の接続コネクタにガイドの位置を
合わせて、ストッパーが確実に固定されるまで挿入してください。
PUコネクタ
パラメータユニット接続ケーブル
(FR-CB2□□)(オプション)
STF FWD PU
操作パネルFR-PA07
(オプション)
パラメータユニットFR-PU07
(オプション)
備 考
ケーブルを自作される場合、下記を参照してください。ケーブルの総延長は最大20mとしてください。
市販品の例(2012年2月時点)
品 名
22
形 式
メーカ名
①
通信ケーブル
プルエイト 24AWG×4P
三菱電線工業(株)
②
RJ-45コネクタ
5-554720-3
タイコ エレクトロニクスアンプ㈱
制御回路仕様
RS-485通信の場合
PUコネクタは、パソコン・FAなどの計算機と通信ケーブルで接続し、ユーザプログラムでドライブユニットの運転・監視
およびパラメータの読出し・書込みを行うことができます。
Modbus-RTUプロトコルの場合も、PUコネクタで通信を行うことができます。
PUコネクタピン配列
ピン番号
ドライブユニット本体
(リセプタクル側)
正面から見て
①
⑧
名称
内容
グランド
①
SG
②
―
パラメータユニット電源
③
RDA
ドライブユニット受信+
④
SDB
ドライブユニット送信-
⑤
SDA
ドライブユニット送信+
⑥
RDB
ドライブユニット受信-
⑦
SG
⑧
―
(端子5と導通しています)
グランド
(端子5と導通しています)
パラメータユニット電源
注 記
②、⑧番ピンは、パラメータユニット用の電源です。RS-485通信を行うときは、使用しないでください。
FREQROL-E700EXシリーズ、E500シリーズ、S500シリーズを混在させてRS-485通信をする際、上記PUコネクタの②、⑧
番ピン(パラメータユニット電源)を誤って接続した場合、インバータ、ドライブユニットが動作しなくなったり、破損するこ
とがあります。
計算機の LAN ボード、FAX モデム用ソケットや電話用モジュラーコネクタには接続しないでください。電気的仕様が異なり
ますので、製品が破損することがあります。
詳細は、179ページ を参照してください。
準拠規格:EIA-485(RS-485)
2
伝送形態:マルチドロップリンク方式
通信速度:MAX 38400bps
総延長:500m
配
線
23
別置形オプションユニットとの接続
2.4 別置形オプションユニットとの接続
ドライブユニットは必要に応じて、様々な別置形オプションユニットを接続することができます。
接続を誤るとドライブユニットの破損や事故の原因になりますので、各オプションユニットの取扱説明書に従い接続、運転
してください。
2.4.1
専用外付ブレーキ抵抗器(MRS形、FR-ABR)を接続する場合(0.4K以上)
ドライブユニットで運転するモータが負荷により回される場合、急激な減速を必要とする場合などに、外部に専用ブレーキ
抵抗器(MRS形、FR-ABR)を取り付けます。専用ブレーキ抵抗器を端子P/+、PRに接続します。
(端子P/+、PRの位置は、端子台の配列(13ページ)を参照してください。)
下記パラメータを設定してください。
接続ブレーキ抵抗器
Pr.30 回生機能選択 設定値
MRS形
0(初期値)
FR-ABR
1
注 記
専用ブレーキ抵抗器以外のブレーキ抵抗器を接続しないでください。
FR-E720EX-0.4K、0.75K
端子P/+、PRにブレーキ抵抗を接続する。
短絡片
端子P/+
端子PR
ブレーキ抵抗器
DCリアクトルを接続する場合以外、端子P/+−P1間の短絡片は外さないでください。
24
Pr.70 特殊回生ブレーキ使用率 設定値
ー
10%
118ページ参照
別置形オプションユニットとの接続
回生ブレーキ用トランジスタが破損した場合、ブレーキ抵抗器(MRS形)、高頻度用ブレーキ抵抗器(FR-ABR)の過熱・焼損
を防ぐためにも下図のようにサーマルリレーによりドライブユニットの一次側電源を遮断する回路での使用を推奨します。
(0.1K、0.2Kには接続できません。)
ドライブ
ユニット
<例1>
MC
R/L1
S/L2
T/L3
電
源
サーマルリレー 高頻度用ブレーキ
(OCR)(∗)
抵抗器(FR-ABR)
P/+
R
PR
MC
R/L1
S/L2
T/L3
電
源
F
ON
ドライブ
ユニット
<例2>
F
OFF
OCR接点
ON
MC
MC
P/+
サーマルリレー 高頻度用ブレーキ
(OCR)(∗)
抵抗器(FR-ABR)
R
PR
B
OFF
MC
OCR接点
C
MC
各容量のサーマルリレーの型番は下表を、また、結線は下図を参照してください。
電源電圧
ブレーキ抵抗器
サーマルリレー型式
(三菱製の場合)
MRS120W200
TH-N20CXHZ-0.7A
MRS120W100
TH-N20CXHZ-1.3A
200V
電源電圧
高頻度用
サーマルリレー型式
ブレーキ抵抗器
(三菱製の場合)
FR-ABR-0.4K
TH-N20CXHZ-0.7A
接点定格
AC110V 5A、
AC220V 2A(AC11級)
DC110V 0.5A、
DC220V 0.25A(DC11級)
接点定格
AC110V 5A、
DC110V 0.5A、
FR-ABR-0.75K
TH-N20CXHZ-1.3A
5/L3
TH-N20
AC220V 2A(AC11級)
200V
1/L1
DC220V 0.25A(DC11級)
2/T1
ドライブユニット
端子P/+へ
6/T3
抵抗器へ
2
注 記
専用ブレーキ抵抗器以外のブレーキ抵抗器を接続しないでください。
各オプションユニットの取扱説明書に従い接続、運転してください。
配
線
ブレーキ抵抗器は、ブレーキユニット、高力率コンバータ、電源回生コンバータなどと併用することはできません。
ブレーキ抵抗器(MRS形)は、リード線を延長して使用しないでください。
端子P/+、N/-に抵抗器を直接接続しないでください。火災の原因になります。
25
別置形オプションユニットとの接続
2.4.2
ブレーキユニット(FR-BU2)の接続
減速時のブレーキ能力向上のためにブレーキユニット(FR-BU2)を接続する場合には、下図のように接続してください。
ブレーキユニット内部のトランジスタが万一故障すると、抵抗器が異常発熱します。抵抗器の異常過熱や火災を防止するた
め、ドライブユニットの入力側に電磁接触器を設け、故障時電流を遮断する回路を設けてください。
(1)
GRZG形放電抵抗器との接続例
ON
OCR
MC
R/L1
S/L2
T/L3
3相交流電源
U
V
W
ドライブ
ユニット
P/+
N/-
GRZG形
放電抵抗器
R
R
モータ 外部サーマル
リレー
M
OCR接点
MC
MC
NFB
OFF
FR-BU2
PR
A
P/+
B
N/-
C
BUE
SD
10m以下
ドライブユニットの端子(P/+、N/-)とブレーキユニット(FR-BU2)の端子名が同じになるように接続してください。
(接続を誤るとドライブユニットおよびブレーキユニットが破損します)
ドライブユニット
ブレーキユニット (FR-BU2)
放電抵抗器の配線距離は各々 5m 以下としてください。また、
ツイストした場合でも10m以下としてください。
放電抵抗器の過熱防止のため外部サーマルリレーの設置を推奨します。
放電抵抗器の接続方法は、FR-BU2の取扱説明書を参照してください。
<推奨外部サーマルリレー>
ブレーキユニット
放電抵抗器
推奨外部サーマルリレー
GZG 300W-50Ω(1本)
TH-N20CXHZ 1.3A
1/L1
5/L3
TH-N20
FR-BU2-1.5K
2/T1
ブレーキユニット
端子P/+へ
注 記
GRZG形放電抵抗器を使用する場合は、FR-BU2のPr.0 ブレーキモード選択 を“1”に設定してください。
DCリアクトル(FR-HEL)を接続する場合以外、端子P/+−P1間の短絡片は外さないでください。
26
6/T3
放電抵抗器へ
別置形オプションユニットとの接続
2.4.3
高力率コンバータ(FR-HC2)の接続
電源高調波抑制のために高力率コンバータ(FR-HC2)を接続する場合に、下図のように確実な配線をしてください。接続を
誤ると高力率コンバータおよびドライブユニットが破損します。
確実な接続の上で、
Pr.30 回生機能選択 =“0(初期値)”に設定してください。
MCCB
MC
*6
電源
外置きボックス
高力率コンバータ
(FR-HCB2) リアクトル2
(FR-HC2)
(FR-HCL22)
リアクトル1
(FR-HCL21)
R/
L1
S/
L2
R2/
L12
S2/
L22
T2/
L32
T/
L3
*6
R2/
L12
S2/
L22
R3/
L13
S3/
L23
T2/
L32
T3/
L33
*6
R3/
L13
S3/
L23
T3/
L33
*7
*7
ROH1
ROH2
88R
88S
*7
R4/
L14
S4/
L24
T4/
L34
*6
ドライブユニット
R/L1
S/L2
T/L3
R4/L14
S4/L24
*1
モータ
U
V
W
T4/L34
P/+
N/-
ROH
SD
RDY
88R
88S
R/L1
RSO
S/L2 *5
SE
T/L3
R1/L11
S1/L21
*7
ヒューズ *8
*4
M
接地
P/+
N/-
*2
X10
*3
RES
SD
*3
*7
電源入力端子R/L1、S/L2、T/L3には何も接続しないでください。誤って接続するとドライブユニットが破損します。
端子P/+ー N/-間(Pー P/+間、Nー N/-間)には、NFBを入れないでください。また、端子N/-、P/+の極性を間違えるとドライブユニットが破
損します。
X10、RES信号に使用する端子は、Pr.178∼Pr.184(入力端子機能選択)にて割り付けてください。(120ページ参照)
FR-HC2の端子RDYとドライブユニットのX10信号、またはMRS信号の割り付けられた端子、FR-HC2の端子SEとドライブユニットの端子SD
は必ず接続してください。接続しない場合、FR-HC2が破損する恐れがあります。
FR-HC2の端子R/L1、S/L2、T/L3は必ず電源に接続してください。接続しないでドライブユニットを運転するとFR-HC2が破損します。
リアクトル1の端子R/L1、S/L2、T/L3の入力からFR-HC2の端子R4/L14、S4/L24、T4/L34の入力の間にMCCB、MCを入れないでくださ
い。正常に動作しません。
接地端子を使って確実に接地配線してください。
ヒューズの設置を推奨します。(FR-HC2取扱説明書参照)
注 記
FR-HC2の端子R/L1、S/L2、T/L3と端子R4/L14、S4/L24、T4/L34の電圧の位相を必ず合わせて接続してください。
FR-HC2とドライブユニットの制御ロジック(シンクロジック/ソースロジック)を一致させてください。(18ページ参照)
2
FR-HC2接続時には、DCリアクトル(FR-HEL)をドライブユニットに接続しないでください。
FR-HC2接続時には、フィルタパックは接続できません。
配
線
参照パラメータ
Pr.30 回生機能選択 118ページ参照
27
別置形オプションユニットとの接続
2.4.4
電源回生共通コンバータ(FR-CV)の接続
電源回生共通コンバータ(FR-CV)を接続する場合には下図のようにドライブユニット端子(P/+、N/-)と電源回生共通コン
バータ(FR-CV)の端子記号が同じになるように接続してください。
R/L1
S/L2
T/L3
U
V
M
W
NFB
3相
交流電源
MC1
専用別置
リアクトル(FR-CVL)
R/L11
S/L21
T/L31
R2/L12
S2/L22
T2/L32
FR-CV形
電源回生共通コンバータ
R2/L1
S2/L2
T2/L3
R/L11
S/L21
T/MC1
ドライブユニット
P/L+
N/L-
P/+
N/-
P24
SD
RDYA
RDYB
RSO
SE
PC
SD
X10
RES
SD
電源入力端子R/L1、S/L2、T/L3には何も接続しないでください。誤って接続するとドライブユニットが破損します。
端子P/+ー N/-間(P/L+ー P/+間、N/L-ー N/-間)には、NFBを入れないでください。また、端子N/-、P/+の極性を間違えるとドライ
ブユニットが破損します。
X10信号に使用する端子は、Pr.178∼Pr.184(入力端子機能選択)にて割り付けてください。(120ページ参照)
電源と端子R/L11、S/L21、T/MC1は必ず接続してください。
接続しないでドライブユニットを運転すると電源回生共通コンバータが破損します。
FR-CVの端子RDYBとドライブユニットのX10信号、またはMRS信号の割り付けられた端子、FR-CVの端子SEとドライブユニットの
端子SDは必ず接続してください。接続しない場合、FR-CVが破損する恐れがあります。
注 記
端子R/L11、S/L21、T/MC1と端子R2/L1、S2/L2、T2/L3の電圧の位相を必ず合わせて接続してください。
FR-CV接続時には、シンクロジック(出荷時)を使用してください。ソースロジックの場合は、接続できません。
FR-CVと接続する場合には、DCリアクトル(FR-HEL)をドライブユニットに接続しないでください。
2.4.5
DCリアクトル(FR-HEL)を接続する場合
(1) DCリアクトル(FR-HEL)を使用するときには、端子P/+ー P1間にリアクトルを接続します。
端子P/+ー P1間を短絡している短絡片を必ず取り外してください。取り外さないとリアクトルの性能が発揮されませ
ん。
P1
P/+
FR-HEL
短絡片を
はずす。
(2) DC リアクトル (FR-HEL) は取付けねじにより盤と電気的に接続されるため、盤へ確実に取り付けることで接地されま
す。ただし、盤への接地だけでは十分接地できない場合は、接地配線を行うことができます。
接地配線を行う場合は、ワニスを除去した取付け穴に配線してください。
(FR-HELの取扱説明書参照)
注 記
配線距離は5m以内としてください。
使用電線サイズの目安は電源線(R/L1、S/L2、T/L3)、接地線と同等か、それ以上としてください。(14ページ参照)
FR-HC2、FR-CVと接続する場合には、DCリアクトル(FR-HEL)をドライブユニットに接続しないでください。
28
3
ドライブユニット使用上の注意
この章では、本製品をお使いいただく上での基本的な「ドライブ
ユニット使用上の注意」について説明しています。
注意事項など必ず一読してからご使用ください。
3.1
ノイズ(EMI)と漏れ電流について........................................................ 30
3.2
リアクトルの設置について ................................................................. 36
3.3
電源遮断と電磁接触器(MC) ................................................................ 37
3.4
ドライブユニット使用上の注意 ......................................................... 38
3.5
ドライブユニットを使用したシステムのフェールセーフについて 40
1
2
3
4
5
6
7
29
ノイズ(EMI)と漏れ電流について
3.1 ノイズ(EMI)と漏れ電流について
3.1.1
漏れ電流とその対策
ドライブユニットの入出力配線と他の線間および大地間並びにモータには静電容量が存在し、これらを通じて漏れ電流が流
れるため、次のような方法で対策を実施してください。なお、漏電ブレーカの選定はキャリア周波数に関わらず、漏電ブレー
カの定格感度電流の選定によります。
(1)
大地間漏れ電流
漏れ電流はドライブユニットの自系統だけではなく、接地線などを通じてほかの系統へも流入することがあります。この漏
れ電流によって漏電遮断器や漏電リレーが不要動作をすることがあります。
対策
高周波帯の感度の鈍い漏電遮断器を使用します。
ドライブユニットの出力電流に含まれている人体への影響が比較的小さな高周波成分の漏れ電流に対して、検出感度を
鈍くすることによって不要動作を防止します。
大地間の浮遊容量を小さくします。
比誘電率の低い材料で絶縁されたケーブルや電線を使用し、ドライブユニットとモータ間の配線長が極力短くなるよう
に配線します。
(2)
線間の漏れ電流
ドライブユニット出力配線間の静電容量に流れる漏れ電流の高調波分によって、外部に接続したサーマルリレーが不要動作
することがあります。
NFB
電源
MC
サーマルリレー
ドライブ
ユニット
モータ
M
線間静電容量
線間の漏れ電流の経路
対策
Pr.9 電子サーマル を使用します。
線間の漏れ電流の影響を受けないでモータ保護を確実に行うためには、温度センサでモータ本体の温度を直接検出して
保護する方法を推奨します。
漏れ電流の分、外部サーマルリレーの設定値を大きくします。
線間の浮遊容量を小さくします。
比誘電率の低い材料で絶縁されたケーブルや電線を使用し、ドライブユニットとモータ間の配線長が極力短くなるよう
に配線します。
ノーヒューズブレーカの設置と選定
受電側にはドライブユニット入力側の配線保護のため、ノーヒューズブレーカ(NFB)を設置してください。NFBの選定は
ドライブユニットの入力側力率(電源電圧、出力周波数、負荷によって変化)によります。特に完全電磁形のNFBは高調波電
流により動作特性が変化しますので、大きめの容量を選定する必要があります。(該当ブレーカの資料で確認してくださ
い。) また、漏電ブレーカは当社の高調波・サージ対応品を使用してください。
30
ノイズ(EMI)と漏れ電流について
(3)
漏電ブレーカの定格感度電流の選定
漏電ブレーカをドライブユニット回路に適用する場合、定格感度電流は次により選定します。
高調波・サージ対応品の場合
Ig1、Ig2:電線路の商用電源運転時の漏れ電流
定格感度電流
I△n≧10×(Ig1+Ign+Igi+Ig2+Igm)
一般品の場合
定格感度電流
Ign:ドライブユニット入力側ノイズフィルタの漏れ電流
Igm:モータの漏れ電流
(MM-GKRシリーズモータ漏れ電流 0mA)
Igi:ドライブユニット本体漏れ電流
I△n≧10×{Ig1+Ign+Igi+3×(Ig2+Igm)}
CVケーブルを金属管配線した
場合の電線路の商用電源運転
時の1kmあたりの漏れ電流例
(200V 60Hz)
120
漏れ電流
100
80
60
40
(mA)
20
0
2 3.5
8 14 22 38 80 150
5.5
30 60 100
電線サイズ(mm 2)
<例>
高調波・サージ対応品
一般品の場合
の場合
漏れ電流Ig1(mA)
2mm 2×5m
ELB
ノイズ
フィルタ
Ig1
2mm 2×10m
ドライブ
ユニット
M
Ig2
Ign
3φ
200V0.75kW
Igm
Igi
20×
5m
1000m
漏れ電流Ign(mA)
0
漏れ電流Igi(mA)
1
漏れ電流Ig2(mA)
20 ×
モータ漏れ電流Igm(mA)
10m
1000m
= 0.1
= 0.2
0
合計漏れ電流(mA)
1.3
1.7
定格感度電流(mA)(≧Ig × 10)
15
30
注 記
漏電ブレーカ(ELB)は、ドライブユニットの入力側に設置してください。
結線中性点接地方式の場合にはドライブユニットの出力側の地絡に対して感度電流が鈍化しますので、負荷機器の保護接地
をC種接地(10Ω以下)としてください。
ブレーカをドライブユニットの出力側に設置した場合、実効値が定格以下でも高調波により不要動作することがあります。
3
この場合、うず電流、ヒステリシス損が増加して温度上昇しますので設置しないでください。
一般品とは次の機種を示します。……BV-C1形、BC-V形、NVB形、NV-L形、NV-G2N形、NV-G3NA形、NV-2F形
漏電リレー (NV-ZHAを除く)、単3中性線欠相保護付NV
その他の機種は高調波・サージ対応品です。……NV-C・NV-S・MNシリーズ、NV30-FA、NV50-FA、BV-C2、漏電アラー
ム遮断器(NF-Z)、NV-ZHA、NV-H
31
ド
ラ
イ
ブ
ユ
ニ
ッ
ト
使
用
上
の
注
意
ノイズ(EMI)と漏れ電流について
3.1.2
ドライブユニットから発生するノイズ(EMI)の種類と対策
ノイズには、外部から侵入しドライブユニットを誤動作させるノイズとドライブユニットから輻射し周辺機器を誤動作させ
るノイズとがあります。ドライブユニットは高い電磁波耐性を有すように設計されていますが微弱信号を扱う電子機器のた
め、下記の基本的対策は必要となります。またドライブユニットは出力を高キャリア周波数でチョッピングしているのでノ
イズの発生源となります。このノイズ発生により周辺機器が誤動作する場合には、ノイズを抑制する対策(EMI対策)を施し
ます。この対策は、ノイズ(EMI)伝播経路により若干異なります。
(1) 基本的対策
ドライブユニットの動力線(入出力線)と信号線の平行布線や束ね配線は避け、分散配線する。
検出器との接続線、制御用信号線には、ツイストペアシールド線を使用し、シールド線の外被は端子SDへ接続する。
接地は、ドライブユニット、モータなどを1点接地する。
(2) 外部から侵入しドライブユニットを誤動作させるノイズに対する対策(電磁波耐性対策)
ドライブユニットの近くにノイズが多く発生する機器(電磁接触器、電磁ブレーキ、多量のリレーを使用など)が取り付け
られており、ドライブユニットが誤動作する心配があるときは、下記のような対策をする必要があります。
ノイズを多く発生する機器にサージキラーを設け発生ノイズを抑える。
信号線にデータラインフィルタ(33ページ)をつける。
検出器との接続線、制御用信号線のシールドをケーブルクランプ金属で接地する。
(3) ドライブユニットから輻射し周辺機器を誤動作させるノイズに対する対策(EMI対策)
ドライブユニットから発生するノイズは、ドライブユニット本体及びドライブユニット主回路(入・出力)に接続される電
線より輻射されるもの、主回路電線に近接した周辺機器の信号線に電磁的および静電的に誘導するもの、そして、電源電
路線を伝わるものに大別されます。
ドライブユニットの
発生ノイズ
空中伝播
ノイズ
ドライブユニット
からの直接輻射
…経路(1)
ノイズ
電源線からの
輻射ノイズ
…経路(2)
(5)
モータ接続線から
…経路(3)
の輻射ノイズ
電磁誘導
ノイズ
…経路(4)、(5)
静電誘導
ノイズ
…経路(6)
電路伝播
ノイズ
電源線を伝播
するノイズ
漏れ電流による
接地線からの
回り込みノイズ
ノイズ伝播経路
電話
(7)
(7)
(2)
(1)
計器
受信機
センサ電源
ドライブ
(3) ユニット
(6)
(1)
(8)
(4)
…経路(7)
モータ
M
(3) センサ
…経路(8)
対 策
(1)、(2)、(3)
計測器、受信機、センサなど微弱信号を扱い、ノイズの影響を受け誤動作しやすい機器や、信号線がドライブユ
ニットと同一盤内に収納されていたり、近接して布線されている場合にはノイズの空中伝播により機器が誤動作す
ることがありますので、下記のような対策をする必要があります。
影響を受けやすい機器は、ドライブユニットから極力離して設置する。
影響を受けやすい信号線は、ドライブユニットとその入出力線から極力離して設置する。
信号線と動力線(ドライブユニット入出力線)の平行布線や束ね配線は避ける。
入出力にラインノイズフィルタや入力にラジオノイズフィルタを挿入すると電線からの輻射ノイズを抑制するこ
とができます。
信号線や動力線にシールド線を用いたり、それぞれ個別の金属ダクトに入れるとさらに効果的です。
(4)、(5)、(6)
信号線が動力線に平行布線されていたり、動力線と一緒に束ねられている場合には電磁誘導ノイズ、静電誘導ノイ
ズにより、ノイズが信号線に伝播し誤動作することがありますので、下記のような対策をする必要があります。
影響を受けやすい機器は、ドライブユニットから極力離して設置する。
影響を受けやすい信号線は、ドライブユニットの入出力線から極力離して布線する。
信号線と動力線(ドライブユニットの入出力線)の平行布線や束ね配線は避ける。
信号線と動力線にシールド線を用いたり、それぞれ個別の金属ダクトに入れるとさらに効果的です。
(7)
周辺機器の電源がドライブユニットと同一系統の電源と接続されている場合には、ドライブユニットから発生した
ノイズが電源線に伝わるノイズによって機器が誤動作することがありますので、下記のような対策をする必要があ
ります。
ドライブユニットの動力線(出力線)ラインノイズフィルタ(FR-BLF、FR-BSF01)を設置する。
(8)
周辺機器の配線がドライブユニットに配線されることによって閉ループ回路が構成されている場合には、ドライブ
ユニットの接地線から漏れ電流が流れ込んで機器が誤動作することがあります。このようなときには、機器の接地
線を外してみると誤動作しなくなる場合があります。
32
ノイズ(EMI)と漏れ電流について
データラインフィルタ
電磁波耐性対策、EMI対策として、検出器ケーブルなどにデータラインフィルタを設けます。
<例> データラインフィルタ
:ZCAT3035-1330(TDK製)
:ESD-SR-250(NECトーキン製)
インピーダンス仕様(ZCAT3035-1330)
[単位:mm]
インピーダンス()
80
150
39±1
ケーブル固定用
バンド取付け部
34±1
上のインピーダンス値は、参考値であり保証値ではあり
ません。
φ30±1
100∼500MHz
φ13±1
10∼100MHz
TDK
品名
ロット番号
外形寸法図(ZCAT3035-1330)
ノイズ(EMI)対策例
ドライブユニット入力側に
ラインノイズフィルタ
FR-BLF を設置
FR-BSF01
動力電源
ドライブユニット入力側に
ラジオノイズフィルタFR-BIFを設置
FRFRドライブ
BSF01
BSF01
ユニット
制御盤に直接アース
するのをやめる
制御線をアースする
のをやめる
M
モータ
モータ動力線に4芯ケーブル
を使用し、1本をアース線と
して使用
FRBIF
ドライブユニット本体、動力線と
センサ回路を30cm以上離す
(最低でも10cm)
制御電源
ドライブユニット出力側に
ラインノイズフィルタ FR-BLF を設置
FR-BSF01
制御盤
ツイストペアシールドケーブルを使用
センサ
センサ用
電源
シールドはアースせず信号の
コモン線に接続する
備 考
3
EU、EMC指令適合については、取扱説明書(基礎編) を参照してください。
ド
ラ
イ
ブ
ユ
ニ
ッ
ト
使
用
上
の
注
意
33
ノイズ(EMI)と漏れ電流について
3.1.3
電源高調波
ドライブユニットはコンバータ部から電源高調波を発生して発電機や進相コンデンサなどに影響を与えることがあります。
電源高調波はノイズや漏れ電流と発生源や周波数帯、伝達方法が異なります。以下に従い対策を行ってください。
次の表に高調波とノイズの違いを示します。
項 目
周波数
環境
定量的把握
発生量
被害機器の耐量
対策例
高調波
ノイズ
通常40∼50次以下(∼3kHz以下)
高周波数(数10kHz∼1GHzオーダ)
対線路・電源インピーダンス
対空間、距離、布線経路
理論計算が可能
ランダムに発生、定量的把握困難
負荷容量にほぼ比例
電流変化率による(高速スイッチングほど大)
機器ごとに規格で明記
メーカの機器仕様によって異なる
リアクトルをつける
距離を拡げる
対策方法
ドライブユニットから入力側に発生する高調波電
DCリアクトル
(FR-HEL)
流は、配線インピーダンスおよびリアクトルの有
無、負荷側の出力周波数、出力電流の大きさなど
の条件により異なります。
出力周波数、出力電流については、使用最高周波
数時の定格負荷での条件で求めるのが適当と考え 電
ます。
源
NFB
MC
R
X
S
Y
T
Z
ACリアクトル
(FR-HAL)
P/+ P1
R/L1 U
S/L2 V
M
T/L3 W
ドライブ
ユニット 力率改善コンデンサは
入れないでください
注 記
ドライブユニット出力側の力率改善用コンデンサおよびサージキラーはドライブユニット出力の高調波成分により、過熱した
り破損する恐れがあります。またドライブユニットに過電流が流れ、過電流保護が動作するため、ドライブユニット駆動の場
合はドライブユニット出力側に、コンデンサやサージキラーを、設置しないでください。力率改善には、ドライブユニットの
入力側または直流回路にリアクトルを設置してください。
34
ノイズ(EMI)と漏れ電流について
3.1.4
高調波抑制対策ガイドライン
ドライブユニットから発生した高調波電流は電源トランスを介して受電点へ流出してゆきます。この流出高調波電流によっ
て、ほかの需要家へ影響を及ぼすために、高調波抑制対策ガイドラインが制定されました。
『特定需要家ガイドライン』
高圧または特別高圧需要家が高調波発生機器を新設、増設または更新する場合に、その需要家から流出する高調波電流の
上限値を定めたもので、超過する場合は何らかの対策を要求されます。
表1 契約電力1kW当たりの高調波流出電流上限値
受電電圧
5次
7次
11次
13次
17次
19次
23次
23次超
6.6kV
3.5
2.5
1.6
1.3
1.0
0.9
0.76
0.70
22kV
1.8
1.3
0.82
0.69
0.53
0.47
0.39
0.36
33kV
1.2
0.86
0.55
0.46
0.35
0.32
0.26
0.24
(1)
特定需要家ガイドラインの適用
設備を新設・
増設・更新
等価容量の合計算出
基準容量以下
等価容量合計
基準容量超過
高調波流出電流の算出
高調波電流
上限以下か
上限値超過
高調波抑制対策要
上限値以下
高調波抑制対策不要
表2 FREQROL-E700EXシリーズの換算係数
分 類
回路種別
3
5
換算係数 Ki
リアクトルなし
K31=3.4
三相ブリッジ
リアクトルあり(交流側)
K32=1.8
(コンデンサ平滑)
リアクトルあり(直流側)
K33=1.8
リアクトルあり(交・直流側)
K34=1.4
高力率コンバータ使用時
K5=0
自励三相ブリッジ
3
表3 等価容量限度値
受電電圧
基準容量
6.6kV
50kVA
22/33kV
300kVA
66kV以上
2000kVA
表4 高調波含有率(基本波電流を100%としたときの値)
5次
7次
11次
13次
17次
19次
23次
25次
なし
リアクトル
65
41
8.5
7.7
4.3
3.1
2.6
1.8
三相ブリッジ
あり(交流側)
38
14.5
7.4
3.4
3.2
1.9
1.7
1.3
(コンデンサ平滑)
あり(直流側)
30
13
8.4
5.0
4.7
3.2
3.0
2.2
あり(交・直流側)
28
9.1
7.2
4.1
3.2
2.4
1.6
1.4
35
ド
ラ
イ
ブ
ユ
ニ
ッ
ト
使
用
上
の
注
意
リアクトルの設置について
①高調波発生機器の等価容量P0の算出
「等価容量」とは、需要家が有する高調波発生機器の容量を6パルス変換装置に換算した容量であり、次式により算出しま
す。等価容量の合計が表3の限度値を越える場合に以下の手順で高調波を算出する必要があります。
P0=(Ki×Pi)[kVA]
定格容量:適用電動機の容量により決まり、表5より求めます。ただし、
Ki:換算係数(表2によります)
Pi:高調波発生機器の定格容量[kVA]
ここでいう定格容量は高調波発生量算出のための数値であり、実際にド
ライブユニット駆動する場合に必要な電源設備容量とは異なるため注意
が必要です。
i :変換回路種別を示す数
②高調波流出電流の算出
高調波流出電流=基本波電流(受電電圧換算値)×稼働率×高調波含有率
・稼働率:稼働率=実負荷率×30分間中の運転時間率
・高調波含有率:表4より求めます。
表5 3相ドライブユニット駆動時の定格容量と高調波流出電流
定格電流
基本波電流
〔A〕
6.6kV換算値
200V
(mA)
0.1
0.2
0.4
0.61
18
0.22
0.98
30
0.35
19.5
12.3
2.55
2.31
1.29
0.93
0.78
0.54
1.61
49
0.57
31.85
20.09
4.165
3.773
2.107
1.519
1.274
0.882
0.75
2.74
83
0.97
53.95
34.03
7.055
6.391
3.569
2.573
2.158
1.494
適用
電動機kW
高調波流出電流6.6kV換算値(mA)
定格容量
(kVA)
(リアクトルなし、稼働率100%の場合)
5次
7次
11次
13次
17次
19次
23次
25次
11.7
7.38
1.53
1.386
0.774
0.558
0.468
0.324
③対策要否の判定
高調波流出電流>契約電力1kW当たりの上限値×契約電力なら、高調波抑制対策が必要となります。
④高調波対策の種類
No.
1
2
3
4
5
6
項 目
内 容
リアクトル設置
ドライブユニットの交流側にACリアクトル(FR-HAL)、または直流側にDCリアクトル(FR-HEL)を設
(FR-HAL、FR-HEL)
置、あるいはその両方を設置することにより、高調波流出電流を抑制することができます。
高力率コンバータ
(FR-HC2)
整流回路(コンバータ部)をトランジスタでスイッチングさせ、電流波形を正弦波により近く抑制するこ
とによって、高調波発生量を大幅に減少させることができます。ドライブユニットとは直流部で接続し
ます。高力率コンバータ(FR-HC2)は、標準付属品と組み合わせて使用します。
力率改善用
力率改善用進相コンデンサは直列リアクトルと組み合わせ使用することにより、高調波電流を吸収する
コンデンサ設備
効果があります。
変圧器の多相化運転
変圧器2台を使用し、 -△、△-△の組合わせのように位相角が30°異なる組合わせで使用すると、12
パルス相当の効果があり低次の高調波電流を低減することができます。
受動フィルタ
特定の周波数それぞれに対してインピーダンスが小さくなるようにコンデンサとリアクトルを組み合わ
(ACフィルタ)
せたもので、大きな高調波電流吸収効果が期待できます。
能動フィルタ
(アクティブフィルタ)
高調波電流を発生している回路の電流を検出して基本波電流との差分の高調波電流を発生させ、検出点
での高調波電流を抑制するもので、大きな高調波電流吸収効果が期待できます。
3.2 リアクトルの設置について
大容量の電源トランス直下(500kVA以上)に接続した場合や進相コンデンサの切換えがある場合、電源入力回路に過大な
ピーク電流が流れ、コンバータ部分を破損させることがあります。このような場合には必ずオプションのリアクトル(FRHAL)を設置してください。
NFB
電
源
MC
ACリアクトル ドライブ
ユニット
(FR-HAL)
R
X
S
Y
T
Z
R/L1 U
1500
S/L2 V
電源
設備 1000
容量
(kVA)
500
T/L3 W
P/+ P1
M
0
36
リアクトル
設置範囲
配線の長さ(m) 10
電源遮断と電磁接触器(MC)
3.3 電源遮断と電磁接触器(MC)
(1)
ドライブユニット入力側電磁接触器(MC)
ドライブユニット入力側は次のような目的でMCを設けることを推奨します。
(選定については4ページ を参照してください。)
1)ドライブユニット保護機能動作時、あるいは駆動装置異常時(非常停止操作など)にドライブユニットを電源から開放する
場合。たとえばオプションのブレーキ抵抗器を接続した場合、ブレーキ用放電抵抗器の熱容量不足や回生ブレーキ使用率
過大などで回生ブレーキ用トランジスタが破損した時に、放電抵抗器の過熱・焼損を防ぎます。
2)停電によってドライブユニット停止後、復電時自然再始動による事故を防止する場合。
3)ドライブユニット通電中は、停止中でも制御電源で若干の電力を消費しています。長時間ドライブユニットを停止させて
おく場合は、ドライブユニット電源を断にすると若干省電力となります。
4)保守、点検作業の安全性確保のためドライブユニットを電源から切り離す場合。
運転中に非常停止する場合は、ドライブユニット入力側電流に対してJEM1038-AC-3級定格使用電流で選定してください。
備 考
入力側電磁接触器による頻繁な開閉は、電源投入時の突入電流の繰り返しにより、コンバータ部の寿命 ( 開閉寿命は 100 万回
程度)を短くするので、避ける必要があります。ドライブユニット始動制御用端子(STF、STR)の入・切によってドライブユ
ニットを運転、停止させてください。
NFB
ドライブユニット
R/L1
U
S/L2
V
T/L3
W
MC
3相交流
電源
運転準備
OFF
ON
RA
始動・停止
MC
始動
停止
(2)
モータ
左図のように始動停止は必ず始動信号
(STF(STR)信号のON、OFF)で行ってください。
C
B
MC
MC
ドライブユニットの始動・停止回路例
A
STF(STR)
SD
RA
RA
ドライブユニット出力側開閉器の取扱い
3
ドライブユニットとモータ間の開閉器はドライブユニット、モータ共に停止中に切り換えてください。ドライブユニット運
転中にOFF→ONした場合、ドライブユニットの過電流保護などが動作します。
注 記
PMモータは、磁石を内蔵した同期電動機のため、ドライブユニットの電源を切った状態でもモータが回っている間は、モー
タの端子には高電圧が発生しています。配線、保守点検はモータが停止していることを確認して行ってください。モータが
負荷に回される用途では、ドライブユニットの出力側に低圧手動開閉器を接続し、開閉器を開いて、配線、保守点検を行っ
てください。感電のおそれがあります。
ドライブユニットの出力側には電磁接触器を使用しないでください。
37
ド
ラ
イ
ブ
ユ
ニ
ッ
ト
使
用
上
の
注
意
ドライブユニット使用上の注意
3.4 ドライブユニット使用上の注意
FREQROL-E700EXシリーズドライブユニットは信頼性の高い製品ですが、誤った周辺回路の組み方や、運転・取扱い方法
によっては製品寿命を縮めたり、破損させることがあります。
運転に際しては必ず次の事項を再確認の上でご使用願います。
(1)
電源およびモータ配線の圧着端子は絶縁スリーブ付きのものを推奨します。
(2)
電源がドライブユニットの出力端子(U、V、W)に印加されるとドライブユニットが破損します。このような配線は絶対に
しないでください。
(3)
配線時にドライブユニット内部に電線の切りくずを残さないでください。
電線の切りくずは、異常、故障、誤動作の原因になります。ドライブユニットはいつもきれいにしておいてください。
制御盤などに取付け穴をあけるときは、切粉などがドライブユニットに入らないよう注意してください。
(4)
電圧降下が2%以下となるような電線サイズで配線してください。
ドライブユニットとモータ間の配線距離が長い場合は、特に低速度出力時、主回路ケーブルの電圧降下によりモータの
トルクが低下します。
推奨の電線サイズについては14ページ を参照してください。
(5)
ドライブユニットとモータ間の配線長は30m以下で使用してください。
(6)
電波障害について
ドライブユニットの入出力(主回路)には高周波成分を含んでおり、ドライブユニットの近くで使用される通信機器
(AMラジオなど)に電波障害を与える場合があります。この場合にはオプションのラジオノイズフィルタFR-BIF(入力
側専用)、ラインノイズフィルタFR-BSF01、FR-BLF、またはフィルタパック、EMCフィルタを取り付けることに
よって障害を小さくすることができます。
(7)
ドライブユニットの出力側には進相用コンデンサやサージキラー、ラジオノイズフィルタを取り付けないでください。
ドライブユニットトリップやコンデンサ、サージキラーの破損を引き起こします。接続されている場合は取り外してく
ださい。
(8)
電源を遮断した後しばらくの間はコンデンサが高圧で充電されていて危険です。
ドライブユニット内部の点検を行う場合は電源を遮断した後でも、しばらくの間は平滑コンデンサが高圧状態にありま
すので、電源遮断後10分以上経過した後にドライブユニット主回路端子P/+-N/-間の電圧がDC30V以下であることを
テスタなどで確認してから行ってください。
(9)
ドライブユニット出力側での短絡、地絡はインバータモジュールを破損することがあります。
周辺回路不備による短絡の繰返し、あるいは結線不備、モータの絶縁抵抗低下による地絡はインバータモジュールを
破損することがありますのでドライブユニット運転前には回路の絶縁抵抗を十分確認してください。
ドライブユニット出力側の対地絶縁、相間絶縁は電源投入前に十分確認してください。
特に古いモータの場合、雰囲気の悪い場所の場合にはモータの絶縁抵抗などの確認を確実に行ってください。
(10) ドライブユニット入力側の電磁接触器でドライブユニットの始動・停止をしないでください。
入力側電磁接触器による頻繁な開閉は、電源投入時の突入電流の繰り返しにより、コンバータ部の寿命(開閉寿命は100
万回程度)を短くするので、避ける必要があります。ドライブユニットの始動停止は必ず始動信号(STF、STR信号の
ON/OFF)で行ってください。(37ページ参照)
38
ドライブユニット使用上の注意
(11) 端子P/+、PRは外付けブレーキ抵抗器以外の機器を接続しないでください。
機械式ブレーキは接続しないでください。
0.1K、0.2Kは、ブレーキ抵抗器を接続できません。端子P/+、PR間には何も接続しないでください。
また、この間は絶対に短絡しないでください。
(12) ドライブユニット入出力信号回路には許容電圧以上の電圧を印加しないでください。
ドライブユニット入出力信号回路に許容電圧を超えた電圧を加えたり、極性を間違えると入出力用素子が破損すること
があります。特に速度設定用ボリュームの接続を間違って端子10-5間が短絡されることのないよう配線を確認の上でご
使用願います。
(13) 停電後の復電で機械の再始動防止が必要な場合にはドライブユニットの入力側に電磁接触器を設けるとともに、始動信
号がONしないようなシーケンスとしてください。
始動信号(始動スイッチ)が保持されたままであると、復電でドライブユニットは自動的に再始動します。
(14) ドライブユニット入力側電磁接触器(MC)の設置目的
ドライブユニット入力側は次のような目的でMCを設置してください。(選定については4ページ を参照してください。)
1) ドライブユニット保護機能動作時、あるいは駆動装置異常時(非常停止操作など)にドライブユニットを電源から開放
する場合。たとえばオプションのブレーキ抵抗器を接続した場合、ブレーキ用放電抵抗器の熱容量不足や回生ブレー
キ使用率過大などで回生ブレーキ用トランジスタが破損した時に、放電抵抗器の過熱・焼損を防ぎます。
2) 停電によってドライブユニット停止後、復電時自然再始動による事故を防止する場合。
3) 保守、点検作業の安全性確保のためドライブユニットを電源から切り離す場合。
運転中に非常停止する場合は、ドライブユニット入力側電流に対してJEM1038-AC-3級定格使用電流で選定してくだ
さい。
(15) ドライブユニット出力側開閉器の取扱い
ドライブユニットとモータ間の開閉器はドライブユニット、モータ共に停止中に切り換えてください。ドライブユニッ
ト運転中にOFF→ONした場合、ドライブユニットの過電流保護などが動作します。
(16) ドライブユニットから発生するノイズ対策について
アナログ信号によりモータの回転速度を可変して使用する場合において、ドライブユニットから発生するノイズにより
速度設定信号が変動しモータの回転速度が安定しないような場合、次の対策が有効です。
信号線と動力線(ドライブユニットの入出力線)の平行布線や束ね配線は避ける。
信号線を動力線(ドライブユニットの入出力線)から極力離す。
信号線にシールド線を使用する。
信号線にフェライトコア(例:ZCAT3035-1330 TDK製)を設ける。
(17) 過負荷運転に関する注意事項
ドライブユニットにて運転・停止の繰返し頻度が高い運転を行う時に、大電流が繰り返し流れる事により、ドライブユ
ニットのトランジスタ素子の温度の上昇・下降が繰り返され、熱疲労により寿命が短くなる場合があります。熱疲労に
は電流の大きさが影響していますので、拘束電流や始動電流などを小さくすることにより、寿命を延ばすことが可能に
なります。電流を小さくすることにより寿命を延ばすことが可能ですが、電流自体を小さくするとトルク不足になり、
始動できない場合もありますので、ドライブユニットとモータの容量を大きくして、負荷に対して余裕を持たせること
も対策となります。
(18) 仕様・定格が機械、システムの要求に適合しているか十分に確認してください。
39
3
ド
ラ
イ
ブ
ユ
ニ
ッ
ト
使
用
上
の
注
意
ドライブユニットを使用したシステムのフェールセーフについて
3.5 ドライブユニットを使用したシステムのフェールセーフについて
ドライブユニットは保護機能により異常を検出した場合、保護機能が動作し異常出力信号を出力します。しかし、検出回路
や出力回路が故障した場合など、ドライブユニット異常時に異常出力信号が出力されないことがあります。メーカとしては
品質には万全を期しておりますが、何らかの原因によりドライブユニットが故障した場合に機械の破損など事故につながら
ないようにドライブユニットの各種状態出力信号を利用したインタロックをとるとともに、ドライブユニットが故障した場
合を想定し、ドライブユニットを介さず、ドライブユニット外部にてフェールセーフが可能なシステム構成を検討してくだ
さい。
(1) ドライブユニットの各種状態出力信号を利用したインタロック方法
ドライブユニットの各種状態出力信号を組み合わせて利用し、以下の方法によりインタロックをとることで、ドライブ
ユニットの異常を検出することが可能です。
No
インタロック方法
確認方法
使用する信号
②
ドライブユニット保護機能
動作
ドライブユニット稼動状態
異常接点の動作確認
負論理設定による回路故障の検出
運転準備完了信号確認
③
ドライブユニット運転状態
始動信号と運転中信号の論理チェック
④
ドライブユニット運転状態
始動信号と出力電流の論理チェック
①
異常出力信号(ALM信号)
129
運転準備完了信号(RY信号)
始動信号(STF信号、STR信号)
運転中信号(RUN信号)
始動信号(STF信号、STR信号)
出力電流検出信号(Y12信号)
128
①ドライブユニットの異常出力信号によるチェック
ドライブユニットの保護機能が動作し、ドライブユニット出力
です。
124、128
124、131
ドライブユニット異常発生
(出力遮断)
を停止したとき、異常出力信号(ALM信号)を出力します(ALM
信号は、初期設定で端子ABCに割り付けられています)。
ドライブユニットが正常に動作しているかチェックします。
さらに負論理設定(正常時ON、異常時OFF)とすることも可能
参照ページ
回転速度
時間
ABC (B接点出力
の場合)
RES
ON
OFF
ON OFF
リセット処理
(約1s)
リセットON
②ドライブユニット運転準備完了信号によるドライブユニット稼動状態のチェック
運転準備完了信号(RY信号)はドライブユニットに電源が投入されドライブユニットが運転可能な状態になると出力します。
ドライブユニットへの電源投入後にRY信号が出力されているかチェックします。
ON
電源
ON
STF
ON
RH
回
転
速
度
(r/min)
ゼロ速制御動作
リセット処理
RY
RY2
RUN
時間
初期磁極検出
(約100ms)
ON
ON
ON
③ドライブユニットへ入力する始動信号とドライブユニット運転中信号によるドライブユニット運転状態のチェック
ドライブユニット運転中信号(RUN信号)は、ドライブユニットが運転している時に出力します(RUN信号は、初期設定
で端子RUNに割り付けられています)。
ドライブユニットへ始動信号(正転信号はSTF信号、逆転信号はSTR信号)を入力している時に、RUN信号が出力されて
いるかチェックします。ただし、RUN信号は、始動信号がオフしてもドライブユニットが減速しモータへの出力を停止
するまでの期間は出力しているので信号の論理チェックはドライブユニットの減速時間を考慮したシーケンスとしてく
ださい。
40
ドライブユニットを使用したシステムのフェールセーフについて
出力信号
Pr.190∼Pr.192 設定値
正論理
負論理
ALM
99
199
RY
11
111
RUN
0
100
・ 各種信号を使用する場合は、左表を参考にして
Pr.190∼Pr.192(出力端子機能選択) に機能を割り付けてく
ださい。
注 記
Pr.190∼Pr.192 (出力端子機能選択) により端子割付の変更を行うと、他の機能に影響を与えることがあります。各端子の機
能を確認してから設定を行ってください。
(2) ドライブユニット外部でのバックアップ方法
ドライブユニットの各種状態信号によるインタロックをとったとしても、ドライブユニット自身の故障の状況により、
必ずしも十分とはいえない場合があります。例えば、ドライブユニットの異常出力信号、始動信号とRUN信号出力を使
用したインタロックをとっていた場合でも、ドライブユニットのCPUが故障すると、ドライブユニットに異常が発生し
ても、異常出力信号は出力されず、RUN信号は出力されたままということがあります。
システム重要度に応じて、モータ速度を検出する速度検出器やモータ電流を検出する電流検出器を設け、以下のチェッ
クを行うなどのバックアップシステムを検討してください。
①始動信号と実動作のチェック
ドライブユニットへの始動信号と速度検出器の検出速度、または電流検出器の検出電流を比較し、ドライブユニットへ
始動信号を入力している時にモータが回転していることやモータに電流が流れていることをチェックします。なお、始
動信号がオフしてもドライブユニットが減速し、モータが停止するまでの期間は、モータは回転しているため、モータ
電流も流れています。論理チェックは、ドライブユニットの減速時間を考慮したシーケンスとしてください。また、電
流検出器を用いる場合は、3相分の電流を確認されることを推奨します。
②指令速度と実動作速度のチェック
ドライブユニットへの速度指令と速度検出器の検出速度を比較し実動作速度に差が無いかをチェックします。
コントローラ
システム異常
3
ドライブ
ユニット
センサ
ド
ラ
イ
ブ
ユ
ニ
ッ
ト
使
用
上
の
注
意
(速度、温度、
風量など)
異常検出用センサへ
41
MEMO
42
4
パラメータ
この章では、本製品をお使いいただく上での基本的な「パラメー
タ」について説明しています。
注意事項など必ず一読してからご使用ください。
1
2
3
4
5
6
7
43
操作パネル
4.1 操作パネル
4.1.1
操作パネルの各部の名称
ドライブユニットから操作パネルは取外しできません。
運転モード表示
PU:PU運転モード時に点灯します。
EXT:外部運転モード時に点灯します。
(初期設定時は、電源ONすると点
灯します。)
NET:ネットワーク運転モード時に点灯
します。
PU、EXT:外部/PU併用運転モード1、
2時に点灯します。
操作パネルに指令権がない場合、全て消
灯します。
単位表示
・Hz:周波数を表示する時、点灯します。
(設定周波数モニタを表示する時
は点滅します。)
・A:電流を表示する時、点灯します。
(上記以外を表示する時は「Hz」、
「A」
ともに消灯します。)
運転状態表示
ドライブユニット動作中に点灯/点滅し
ます。
点灯:正転運転中
ゆっくり点滅(1.4sサイクル):
逆転運転中
速い点滅(0.2sサイクル):
または始動指令が入力されている
が運転できない場合
(MRS信号が入力されている場合)
パラメータ設定モード表示
パラメータ設定モード時に点灯します。
モニタ表示
モニタモード時に点灯します。
モニタ(4桁LED)
速度、パラメータ番号などを表示しま
す。
運転の停止
運転指令を停止します。
保護機能(重故障)動作時は、アラームの
リセットも行います。
Mダイヤル
(Mダイヤル:三菱ドライブユニットの
ダイヤルを表します。)
速度設定、パラメータの設定値を変更し
ます。
押すことで下記表示が可能です。
・モニタモード時の設定速度表示
・校正時の現在設定値表示
・アラーム履歴モード時の順番表示
運転モード切換え
PU/外部運転モードを切り換えます。
外部運転モード(別に接続した速度設定
ボリュームと始動信号による運転)を使
用する場合は、このキーを押して、運転
モード表示のEXTが点灯している状態に
してください。
モード切換え
各設定モードを切り換えます。
と同時押しすることで運転モード
を切り換えることもできます。(46ペー
ジ参照)
長押し(2s)で操作ロックが行えます。
Pr.161 =“0”(初期値)ではキーロック
モード無効です。
(229ページ参照)
各設定の決定
運転中に押すとモニタが
回転速度
出力電流
出力電圧
になります。
44
(併用モードへは
と同時押し(0.5s)
するか(46ページ参照)、Pr.79 を変更して
ください。)
PU:PU運転モード
EXT:外部運転モード
PU停止解除も行います。
始動指令
Pr.40 の設定により、回転方向が選択で
きます。
操作パネル
4.1.2
基本操作(出荷設定時)
運転モード切換え
電源投入時(外部運転モード)
PUJOG運転モード
モ
ニ
タ
・
速
度
設
定
(例)
PU運転モード(回転速度モニタ)
数値変更
と速度がフリッカー
速度設定が書込み完了!!
Hz
A
Hz
A
出力電流モニタ
パ
ラ
メ
|
タ
設
定
出力電圧モニタ
現在設定値
を表示
パラメータ設定モード (4ページ参照)
(例)
数値変更
パラメータと設定値がフリッカー
パラメータ書込み完了!!
パラメータクリア
パラメータ
オールクリア
アラーム履歴クリア
4
初期値変更リスト
ア
ラ
|
ム
履
歴
パ
ラ
メ
|
タ
[アラーム履歴の操作] (236ページ参照)
過去8回分のアラームを表示することができます。
(最新のアラーム履歴には「. 」がつきます。)
アラーム履歴の無い場合は
を表示します。
アラーム表示中は
・
を押すたびにアラーム発生時の回転速度→出力電流→出力電圧→通電時間
を順番に表示します。(通電時間の次はアラーム表示に戻ります。)
・Mダイヤルを押すと過去何回目のアラームかを表示します。
45
操作パネル
4.1.3
運転モードを簡単設定(簡単設定モード)
始動指令と速度指令の組み合わせに応じたPr.79 運転モード選択 の設定が簡単な操作で行えます。
変更例
始動指令:外部(STF/STR)、速度指令:
で運転する。
操 作
表 示
1. 電源投入時画面
モニタ表示になります。
2.
と
を同時に0.5s押し続けま
点滅
す。
3.
を回して
に合わせます。
(その他の設定は下表を参照してくださ
い)
運転方法
始動指令
速度指令
操作パネル表示
点滅
点滅
点滅
外部
アナログ
(STF、STR)
電圧入力
点滅
点滅
外部
(STF、STR)
点滅
点滅
アナログ
電圧入力
点滅
4.
を押して設定します。
フリッカー・・・パラメータ設定完了!!
3s後モニタ表示になります。
備 考
が表示されてしまった…なぜ?
Pr.77 =“1”でパラメータが書込禁止になっています。
が表示されてしまった…なぜ?
運転中は設定できません。始動指令(
を押す前に
、STFまたはSTR)をOFFしてください。
を押して設定しないでモニタ表示に戻ることができます。その場合、PU運転モード(PU JOG運転モー
ド)中に行うと外部運転モードに、外部運転モード中に行うとPU運転モードに切り換わります。
によるリセットは可能です。
Pr.79 =“3”の速度指令の優先順位は、「多段速運転(RL/RM/RH/REX) >PID制御(X14)> 端子4アナログ入力(AU)>
操作パネルによるデジタル入力」となります。
46
操作パネル
4.1.4
変更例
パラメータ設定値を変更する
Pr.4 3速設定(高速) を変更します。
操 作
表 示
1. 電源投入時画面
モニタ表示になります。
2.
を押してPU運転モードにします。
3.
を押してパラメータ設定モードに
PU表示が点灯します。
PRM表示が点灯します。
します。
(以前に読み出したパラメータの番号を
表示します)
4.
(Pr.4) に合わせ
を回して
ます。
5.
を押して現在設定されている値を
読み出します。
“
Hz
A
”(3000r/min(初期値))を示
します。
6.
を回して設定値“
”
A
(1800r/min)に変更します
7.
を押して設定します。
A
フリッカー・・・パラメータ設定完了!!
を回すと他のパラメータを読み出すことができます。
を押すと設定値を再度表示します。
を2回押すと次のパラメータを表示します。
を2回押すと速度モニタに戻ります。
備 考
が表示されてしまった…なぜ?
を表示した..................書込み禁止エラーです。
4
を表示した..................運転中書込みエラーです。
を表示した..................校正エラーです。
を表示した..................モード指定エラーです。
詳細は242ページ を参照してください。
操作パネルの表示桁数は4桁です。表示する数値は上の桁から4桁のみが表示、設定可能です。表示する数値が小数点以下も含
め5桁以上の場合、上の桁から5桁目以降は表示、設定できません。
(例)Pr.1 の場合(Pr.144 =“10(周波数設定)”時)
60Hzと設定した場合、表示は60.00となります。
120Hzと設定した場合、表示は120.0となり、小数点以下2桁目は表示、設定できません。
4.1.5
Mダイヤルプッシュ
Mダイヤルを押す(
)と、現在設定されている設定速度を表示します。
PU運転モード、外部/PU併用運転モード1(Pr.79 =“3”)の時に表示します。
47
パ
ラ
メ
|
タ
パラメータ一覧
パラメータ一覧
4.2 パラメータ一覧
4.2.1
パ
パラメータ一覧表
ラ
ドライブユニットの単純な可変速運転は、初期設定値のままで運転ができるようになっています。負荷や運転仕様に合わ
せて必要なパラメータを設定してください。パラメータの設定、変更および確認は操作パネルで行うことができます。
備 考
メ
.....FR-A7NC Eキット装着時に機能するパラメータです。
命令コードは、RS-485通信で三菱インバータプロトコルを使用してパラメータ読出、書込を行う場合に、使用するコードです。
|
(RS-485通信については182ページ参照 )
「制御モード別対応表」、
「パラメータコピー」、
「パラメータクリア」、
「パラメータオールクリア」の“○”は有効、
“×”は無効を表します。
◎のパラメータはシンプルモードパラメータを示しています。
(初期値は拡張モード)
備考欄の記号
タ
のパラメータはPr.77 パラメータ書込選択 を“0”
(初期値)にしてあっても、運転中に設定値を変更することがで
一
きます。
覧
パラメータ
◎
◎
◎
◎
◎
◎
◎
1
2
4
5
6
7
8
名 称
設定範囲
最小設定単位
初期値
1r/min
3000r/min
上限設定
0∼4800r/min
下限設定
0∼4800r/min
1r/min
3速設定(高速)
0∼4800r/min
1r/min
3速設定(中速)
0∼4800r/min
1r/min
3速設定(低速)
0∼4800r/min
1r/min
加速時間
0∼360s
0.01s
減速時間
0∼360s
0.01s
98
0r/min
98
3000r/min 100、81
1500r/min 100、81
300r/min 100、81
5s
108
5s
108
パラメータ
◎
◎
◎
◎
◎
◎
◎
備 考
命令コード
制御モード別対応表
パラメータ
読出
書込
拡張
速度
位置
コピー
クリア
オールクリア
1
2
4
5
6
7
8
01
81
0
○
○
○
○
02
82
0
×
○
○
○
04
84
0
○
○
○
05
85
0
○
○
○
○
○
○
○
○
06
86
0
07
87
0
08
88
0
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
電子サーマル
0∼500A
0.01A
モータ
定格電流
直流制動
基本機能
機能
参照 お客様
ページ 設定値
10
フリーラン速度
0∼4800r/min
1r/min
90r/min
114
10
0A
8A
0
○
×
○
○
○
11
直流制動動作時間
0∼10s
0.1s
0.5s
114
11
0B
8B
0
○
×
○
○
○
−
13
15
16
17
始動速度
0∼4800r/min
1r/min
15r/min
0
×
○
○
○
1r/min
150r/min
0F
8F
0
○
○
0∼360s
0.01s
0.5s
MRS入力選択
0、2、4
1
0
○
○
○
○
JOG加減速時間
13
15
16
17
8D
0∼4800r/min
111
102
102
122
0D
JOG速度設定
20
加減速基準速度
12∼4800r/min
1r/min
3000r/min
108
22
トルク制限動作レベル
0∼200%
0.1%
200%
95
24
25
26
27
29
30
31
32
33
34
35
36
37
40
41
42
43
44
45
48
多段速設定(4速)
0∼4800r/min、 9999
1r/min
多段速設定(5速)
0∼4800r/min、 9999
1r/min
JOG
運転
◎9
多段速設定
トルク 加減速
制限 時間
−
−
速度ジャンプ
−
−
第2機能 速度検出
−
48
多段速設定(6速)
0∼4800r/min、 9999
1r/min
多段速設定(7速)
0∼4800r/min、 9999
1r/min
加減速パターン選択
0、1、2
1
回生機能選択
0、1
1
速度ジャンプ1A
0∼4800r/min、 9999
1r/min
速度ジャンプ1B
0∼4800r/min、 9999
1r/min
速度ジャンプ2A
0∼4800r/min、 9999
1r/min
速度ジャンプ2B
0∼4800r/min、 9999
1r/min
速度ジャンプ3A
0∼4800r/min、 9999
1r/min
速度ジャンプ3B
0∼4800r/min、 9999
1r/min
回転速度表示
0、0.01∼9998
0.001
RUNキー回転方向選択
0、1
速度到達動作幅
0∼100%
速度検出
0∼4800r/min
1r/min
逆転時速度検出
0∼4800r/min、9999
1r/min
第2加減速時間
0∼360s
0.01s
第2減速時間
0∼360s、9999
0.01s
第2トルク制限動作レベル
0∼200%、9999
0.1%
1
0.1%
113
◎9
09
89
0
○
○
○
○
○
100、81
100、81
9999
100、81
9999
100、81
0
112
0
118
9999
99
9999
99
9999
99
9999
99
9999
99
9999
99
0
134
0
228
10%
130
180r/min 130
9999
130
5s
108
9999
108
9999
95
9999
9999
10
90
0
11
91
0
○
○
○
○
20
14
94
0
○
22
16
96
0
24
25
26
27
29
30
31
32
33
34
35
36
37
40
41
42
43
44
45
48
18
98
0
19
99
0
1A
9A
0
1B
9B
0
1D
9D
0
1E
9E
0
1F
9F
0
20
A0
0
21
A1
0
22
A2
0
23
A3
0
24
A4
0
25
A5
0
28
A8
0
29
A9
0
2A
AA
0
2B
AB
0
2C
AC
0
2D
AD
0
30
B0
0
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
×
○
○
○
○
○
○
○
×
○
○
○
×
○
○
○
×
○
○
○
×
○
○
○
×
○
○
○
○
×
○
○
○
○
○
○
○
○
○
○
×
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
4
パ
ラ
メ
|
タ
パラメータ一覧
パラメータ
名 称
設定範囲
0、5、8∼12、14、19、20、
23∼31、36、37、52∼55、
61、62、100
1∼3、5、8∼12、14、21、
24、36、37、52、53、61、62
参照 お客様
ページ 設定値
最小設定単位
初期値
1
0
135
1
1
パラメータ
備 考
命令コード
制御モード別対応表
パラメータ
読出
書込
拡張
速度
位置
コピー
クリア
オールクリア
52
34
B4
0
○
○
○
○
○
135
54
36
B6
0
○
○
○
○
○
パ
DU/PUメイン表示データ選択
54
FM端子機能選択
55
速度モニタ基準
0∼4800r/min
1r/min
3000r/min
140
55
37
B7
0
○
○
○
○
○
メ
56
電流モニタ基準
0∼500A
0.01A
モータ
定格電流
140
56
38
B8
0
○
○
○
○
○
|
遠隔機能選択
0、1、2、3
1
0
○
○
○
0∼5
1
41
C1
0
×
○
○
○
43
C3
0
×
○
○
○
44
C4
0
×
○
○
○
45
C5
0
46
C6
0
49
C9
0
4A
CA
0
4B
CB
0
4D
CD
0
4E
CE
0
○
○
○
○
○
○
○
○
○
○
○
×
リトライ選択
59
65
67
68
69
70
73
74
75
77
78
BB
−
59
65
67
68
69
70
73
74
75
77
78
3B
−
◎ 79
◎ 79
4F
CF
0
110
111
原点復帰シフト移動加速時間
0.01∼360s
0.01s
8A
0.01∼360s
0.01s
110
111
0A
原点復帰シフト移動減速時間
0B
8B
117
PU通信局番
0∼31(0∼247)
1
117
11
118
PU通信速度
48、96、192、384
1
118
119
PU通信ストップビット長
0、1、10、11
1
120
PU通信パリティチェック
0、1、2
1
121
PU通信リトライ回数
0∼10、9999
1
122
PU通信チェック時間間隔
0、0.1∼999.8s、 9999
モニタ機能
52
原点
復帰
機能
パラメータ一覧
−
リトライ
−
−
−
−
−
PUコネクタ通信
−
アラーム発生時リトライ回数
0∼10、101∼110
リトライ実行待ち時間
0.1∼360s
リトライ実行回数表示消去
0
特殊回生ブレーキ使用率
0∼30%
1
0.1s
1
0.1%
アナログ入力選択
0、1、10、11
1
入力フィルタ時定数
0∼8
1
リセット選択/PU抜け検出/PU停止選択
0∼3、 14∼17
1
パラメータ書込選択
0、1、2
1
逆転防止選択
0、1、2
1
運転モード選択
0、1、2、3、4、6、7
1
0.1s
123
124
◎ 125
◎ 126
127
128
129
130
131
132
133
134
PU通信待ち時間
0∼150ms、9999
1
PU通信CR/LF選択
0、1、2
1
端子2速度設定ゲイン速度
0∼4800r/min
1r/min
端子4速度設定ゲイン速度
0∼4800r/min
1r/min
PID制御自動切換速度
0∼4800r/min、9999
1r/min
PID動作選択
0、20、21、50、51、60、61
PID比例帯
0.1∼1000%、9999
PID積分時間
0.1∼3600s、9999
0.1s
PID上限リミット
0∼100%、9999
0.1%
PID下限リミット
0∼100%、9999
0.1%
PID動作目標値
0∼100%、9999
0.01%
PID微分時間
0.01∼10s、9999
0.01s
−
144
回転速度設定切換
2、4、6、8、10、102、104、
106、108、110
−
147
150
151
152
153
156
157
◎ 160
161
168
169
加減速時間切換え速度
0∼4800r/min、9999
出力電流検出レベル
0∼200%
出力電流検出信号遅延時間
0∼10s
−
電流検出
PID運転
−
−
−
−
−
−
−
50
1
0.1%
105
143
0
143
1s
143
0
143
0%
118
1
147
1
151
14
157
0
160
0
161
165、
0
172
5s
89
5s
89
182、
0
199
182、
192
199
1
182
182、
2
199
1
183
183、
0
199
9999
182
1
182
3000r/min 152
3000r/min 152
9999
211
0
211
100%
211
1s
211
9999
211
9999
211
9999
211
9999
211
0
0
×
○
○
○
○
○
○
○
○
×
×
○
○
○
○
○
○
○
○
○
○
○
1
×
○
○
×
○
○
○
1
○
○
○
91
1
○
○
○
○
○
12
92
1
○
○
○
○
○
119
13
93
1
○
○
○
○
○
120
14
94
1
○
○
○
○
○
121
15
95
1
○
○
○
○
○
122
16
96
1
○
○
○
○
○
123
124
◎ 125
◎ 126
127
128
129
130
131
132
133
134
17
97
1
○
○
98
1
○
○
○
18
○
○
○
19
99
1
×
○
×
○
1A
9A
1
×
○
×
○
1B
9B
1
×
○
○
○
1C
9C
1
×
○
○
○
1D
9D
1
×
○
○
○
1E
9E
1
×
○
○
○
1F
9F
1
×
○
○
○
20
A0
1
×
○
○
○
×
○
○
○
×
○
○
○
○
○
○
○
9999
0.1s
0s
108
131
131
131
131
95
95
161
229
147
150
151
152
153
156
157
◎ 160
161
168
169
5%
0.5s
1
0
0.1s
0s
0、9999
1
0
0、1、10、11
1
0
メーカ設定用パラメータです。設定しないでください。
○
×
150%
0.1%
速度設定/キーロック操作選択
×
0.1%
0.01s
拡張機能表示選択
○
1r/min
0∼200%
0∼31、 100、 101
○
○
144
0∼1s
0∼25s、9999
○
○
134
ゼロ電流検出時間
OL信号出力タイマ
○
110
1
ゼロ電流検出レベル
トルク制限動作選択
×
○
21
A1
1
22
A2
1
○
○
○
○
○
○
○
○
○
○
○
○
2C
AC
1
○
○
○
○
○
○
○
○
○
○
○
×
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
2F
AF
1
32
B2
1
33
B3
1
34
B4
1
35
B5
1
38
B8
1
39
B9
1
00
80
2
01
81
2
メーカ設定用パラメータです。設定しないでください。
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
×
○
ラ
タ
一
覧
4
パ
ラ
メ
|
タ
パラメータ一覧
積算モニタ
クリア
機能
パラメータ
入力端子機能割付け
出力端子機能割付け
多段速設定
−
名 称
寿命診断
命令コード
制御モード別対応表
パラメータ
読出
書込
拡張
速度
位置
コピー
クリア
オールクリア
170
0A
8A
2
○
○
○
×
○
パ
171
稼動時間計クリア
0、9999
1
9999
135
171
0B
8B
2
○
○
×
×
×
ラ
1
60
120
178
12
92
2
○
○
○
×
○
STF端子機能選択
179
STR端子機能選択
180
181
182
183
184
RL端子機能選択
RM端子機能選択
RH端子機能選択
MRS端子機能選択
0∼5、7、8、10、12、14、
16、23∼25、29、30、44、
60、62、65∼67、76、
86∼89、9999
0∼5、7、8、10、12、14、
16、23∼25、29、30、44、
60、61、65∼67、76、
86∼89、9999
0∼5、7、8、10、12、14、
16、23∼25、29、30、44、
62、65∼67、76、86∼89、
9999
RES端子機能選択
0、1、3、4、7、8、11∼16、
21、24、26、33、36、38、
47、55、56、60、61、63、
64、90、91、93、95、96、
98、99、100、101、103、
104、107、108、
111∼116、121、124、
126、133、136、138、147、
155、156、160、161、163、
164、190、191、193、195、
196、198、199、9999
0、1、3、4、7、8、11∼16、
21、24、26、33、36、38、
47、55、56、60、61、63、
64、90、91、95、96、98、
99、100、101、103、104、
107、108、111∼116、
121、124、126、133、136、
138、147、155、156、160、
161、163、164、190、191、
195、196、198、199、9999
1
61
120
179
13
93
2
○
○
○
×
○
1
0
94
2
○
95
2
○
×
○
1
2
16
96
2
1
24
17
97
2
1
62
18
98
2
○
○
○
○
○
×
15
○
○
○
○
○
○
1
180
181
182
183
184
14
1
120
120
120
120
120
1
0
126
190
1E
9E
2
○
1
4
126
191
1F
9F
2
1
99
126
192
20
A0
100
100
100
100
100
100
100
100
152
145
119、
124
145
220
220
220
220
220
147
135
232
233
234
235
236
237
238
239
241
249
28
29
2A
AA
2
2B
AB
2
2C
AC
2
2D
AD
2
2E
AE
2
2F
AF
2
31
B1
2
39
B9
250
3A
BA
251
255
256
257
258
259
267
268
269
285
295
3B
3F
191
FU端子機能選択
192
ABC端子機能選択
232
233
234
235
236
237
238
239
241
249
多段速設定(8速)
0∼4800r/min、 9999
1r/min
9999
多段速設定(9速)
0∼4800r/min、 9999
1r/min
9999
多段速設定(10速)
0∼4800r/min、 9999
1r/min
9999
多段速設定(11速)
0∼4800r/min、 9999
1r/min
9999
多段速設定(12速)
0∼4800r/min、 9999
1r/min
9999
多段速設定(13速)
0∼4800r/min、 9999
1r/min
9999
多段速設定(14速)
0∼4800r/min、 9999
1r/min
9999
多段速設定(15速)
0∼4800r/min、 9999
1r/min
9999
アナログ入力表示単位切替
0、1
1
0
始動時地絡検出有無
0、1
1
0
0∼100s、1000∼1100s、
8888、9999
0.1s
9999
0、1
1
1
1
0
(0∼100%)
1%
100%
制御回路コンデンサ寿命表示
(0∼100%)
1%
100%
主回路コンデンサ寿命表示
(0∼100%)
1%
100%
(0∼15)
突入電流抑制回路寿命表示
主回路コンデンサ寿命測定
0、1(2、3、8、9)
1
0
端子4入力選択
0、1、2
1
0
モニタ小数桁選択
0、1、9999
1
9999
メーカ設定用パラメータです。設定しないでください。
速度偏差過大検出速度
0∼360r/min、9999
速度変化量設定
0、0.01、0.1、1、10
タ
一
RUN端子機能選択
寿命警報状態表示
メ
|
190
出力欠相保護選択
52
備 考
135
251
255
256
257
258
259
267
268
269
285
295
−
パラメータ
9999
−
−
参照 お客様
ページ 設定値
1
停止選択
−
初期値
0、10、9999
250
−
最小設定単位
積算電力計クリア
−
−
設定範囲
170
178
−
パラメータ一覧
1r/min
9999
0.01
0
74
232
○
×
○
○
×
○
○
×
○
○
○
×
○
○
○
○
×
○
2
○
○
○
×
○
A8
2
○
○
○
2
×
○
○
○
×
○
○
○
×
○
○
○
×
○
○
○
×
○
○
○
×
○
○
○
×
○
○
○
○
○
○
○
○
2
○
○
○
○
○
○
○
○
○
○
×
A9
○
○
○
2
○
○
○
○
○
BB
2
○
×
×
×
40
C0
2
×
×
×
41
C1
2
42
C2
2
○
○
○
○
○
○
○
2
○
○
○
○
○
○
○
○
○
BF
○
○
○
×
○
×
○
○
○
○
○
○
○
×
○
○
○
○
○
○
○
43
C3
2
4B
CB
2
4C
CC
2
×
×
×
×
×
×
メーカ設定用パラメータです。設定しないでください。
5D
DD
2
67
E7
2
覧
4
パ
ラ
メ
|
タ
機能
パラメータ
パスワード
機能
パラメータ一覧
296
297
RS-485通信
デジタル出力
313
−
−
メンテ
リモート
通信エラー
ナンス
出力
位置制御
−
54
パラメータ一覧
名 称
設定範囲
最小設定単位
初期値
参照 お客様
ページ 設定値
パラメータ
備 考
命令コード
制御モード別対応表
パラメータ
読出
書込
拡張
速度
位置
コピー
クリア
オールクリア
パスワード保護選択
0∼6、100∼106、9999
1
9999
162
296
68
E8
2
○
○
○
×
○
パスワード登録/解除
(0∼5)、1000∼9998、
9999
1
9999
162
297
69
E9
2
○
○
○
○
○
1
9999
−
313
0D
8D
3
○
○
○
○
○
DO0出力選択
314
DO1出力選択
315
DO2出力選択
338
339
340
342
343
349
374
375
420
421
422
423
426
427
430
446
453
455
463
464
465
466
467
468
469
470
471
472
473
474
475
476
477
478
通信運転指令権
0、1、3、4、7、8、11∼16、
21、24、26、33、36、38、
47、55、56、60、61、63、
64,90、91、93、95、96、
98、99、100、101、103、
104、107、108、
111∼116、121、124、
126、133、136、138、147、
155、156、160、161、163、
164、190、191、193、195、
196、198、199、9999
9999
−
314
0E
8E
3
○
○
○
○
○
1
9999
−
315
0F
8F
3
○
○
○
○
○
0、1
1
0
A6
3
○
○
○
0、1、2
1
0
27
A7
3
○
○
○
通信立上りモード選択
0、1、10
1
0
○
○
○
通信EEPROM書込み選択
0、1
1
0
○
○
○
コミュニケーションエラーカウント
−
1
0
×
×
×
0
−
146
9999
108
1
92
1
92
79
20sec-1
0%
79
100パルス 93
40Kパルス 79
9999
135
-1
79
0sec
300r/min
89
1500r/min 89
0
79
0.01s
81
0
81
0
81
0
81
0
81
0
81
0
81
0
81
0
81
0
81
0
81
0
81
0
81
0
81
0
81
338
339
340
342
343
349
374
375
420
421
422
423
426
427
430
446
453
455
463
464
465
466
467
468
469
470
471
472
473
474
475
476
477
478
26
通信速度指令権
173
173
172
186
199
0、1
過速度検出レベル
0∼4800r/min
0∼4800r/min、9999
指令パルス倍率分子(電子ギア分子)
1∼32767
指令パルス倍率分母(電子ギア分母)
1∼32767
位置制御ゲイン
0∼150sec
1r/min
1r/min/ms
1
1
-1
メ
タ
一
1
加速度異常検出レベル
ラ
|
1
通信リセット選択
パ
1sec
-1
位置フィードフォワードゲイン
0∼100%
位置決め完了幅
0∼32767パルス
1パルス
1%
誤差過大レベル
0∼400Kパルス
1Kパルス
位置モニタ選択
4、5、100∼105、9999
モデル位置制御ゲイン
0∼150sec-1
1sec-1
原点復帰高速速度
0∼4800r/min
1r/min
原点復帰シフト移動速度
0∼4800r/min
1r/min
位置制御回転方向選択
0、1
1
1
0.01s
3450r/min
○
○
○
○
○
○
○
○
○
○
1B
9B
4
×
1E
9E
4
×
○
○
○
○
17
97
4
×
1A
9A
4
×
○
○
○
CE
4
×
495
5F
DF
4
○
133
496
60
E0
4
−
−
500
501
00
80
5
01
81
502
02
503
504
0∼9999
1
第6目標位置上位4桁
0∼9999
1
第7目標位置下位4桁
0∼9999
1
第7目標位置上位4桁
0∼9999
1
495
リモート出力選択
0、1、10、11
1
0
133
496
リモート出力内容1
0∼4095
1
0
500
501
通信異常実行待ち時間
0∼999.8s
0.1s
0s
通信異常発生回数表示
0
1
0
183、
199
223
223
○
○
4E
第6目標位置下位4桁
○
○
○
×
1
○
○
○
×
0∼9999
○
○
4
第5目標位置上位4桁
○
×
4
1
○
○
×
CD
1
0∼9999
○
○
4
CC
0∼9999
第5目標位置下位4桁
○
4
4D
第4目標位置上位4桁
○
9F
4C
1
○
○
B5
×
1
0∼9999
○
○
35
4
0∼9999
第4目標位置下位4桁
○
1F
CB
第3目標位置上位4桁
9999
○
×
4B
1
1
○
4
×
0∼9999
0∼9998、9999
○
96
4
第3目標位置下位4桁
メンテナンスタイマ警報出力設定時間
×
16
CA
1
504
4
4A
1
0∼9999
0
95
×
0∼9999
第2目標位置上位4桁
1
15
3
×
第2目標位置下位4桁
0(1∼9998)
×
AB
4
1
メンテナンスタイマ
4
2B
4
0∼9999
503
3
94
3
C8
第1目標位置上位4桁
0
CB
14
3
C9
1
1
4B
A8
AA
49
0∼9999
0、1、2、3
3
3
28
2A
48
0.01∼360s
第1目標位置下位4桁
通信異常時停止モード選択
B1
CA
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
位置制御急停止減速時間
502
31
4A
○
○
○
○
○
○
○
○
37
B7
4
×
3F
BF
4
×
40
C0
4
×
41
C1
4
×
42
C2
4
×
43
C3
4
×
44
C4
4
×
45
C5
4
×
46
C6
4
×
47
C7
4
×
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
×
×
×
○
○
○
○
○
○
○
5
×
○
○
82
5
○
○
○
○
○
03
83
5
○
○
×
×
×
04
84
5
○
○
○
×
○
覧
4
パ
ラ
メ
|
タ
パラメータ一覧
パラメータ一覧
507
パラメータ
読出
書込
拡張
速度
位置
コピー
クリア
オールクリア
506
0∼32767
1
0
93
506
06
86
5
×
○
○
○
○
粗一致出力範囲
0∼32767
1
0
93
507
07
87
5
×
○
○
○
○
508
原点シフト量下位4桁
0∼9999
1
0
508
08
88
5
×
○
○
○
○
ラ
509
原点シフト量上位4桁
0∼9999
1
0
510
位置検出下位4桁
0∼9999
1
0
81
81
93
メ
511
位置検出上位4桁
0∼9999
1
0
512
押当て制御機能選択
0、1、10、11、12
1
0
513
押当て制御トルクリミット
0∼200%
1%
40%
514
押当て制御切換位置下位4桁
0∼9999
1
0
515
押当て制御切換位置上位4桁
0∼9999
1
525
第1位置決め補助機能
526
第2位置決め補助機能
527
第3位置決め補助機能
528
第4位置決め補助機能
529
第5位置決め補助機能
530
第6位置決め補助機能
531
第7位置決め補助機能
532
CC-Link
USB
通信
電流平均値
モニタ
−
56
パラメータ
制御モード別対応表
位置決 原点 位置決
め調整 復帰 め調整
位置検出ヒステリシス幅
設定範囲
命令コード
初期値
−
名 称
参照 お客様
ページ 設定値
最小設定単位
押当て制御
パラメータ
位置制御
機能
備 考
509
09
89
5
×
○
○
○
○
510
0A
8A
5
×
○
○
○
○
93
511
0B
8B
5
×
○
○
○
○
512
0C
8C
5
○
○
○
○
○
513
0D
8D
5
○
○
○
○
○
514
0E
8E
5
×
○
○
○
○
0
87
87
87
87
515
0F
8F
5
×
○
○
○
○
1
10
81
525
19
99
5
×
○
○
○
○
1
10
81
526
1A
9A
5
×
○
○
○
○
1
10
81
527
1B
9B
5
×
○
○
○
○
1
10
81
528
1C
9C
5
×
○
○
○
○
1
10
81
529
1D
9D
5
×
○
○
○
○
1
10
81
530
1E
9E
5
×
○
○
○
○
0、10、100、110
1
10
531
1F
9F
5
×
○
○
○
○
原点復帰選択
2、3、4、6
1
4
532
20
A0
5
×
○
○
○
○
533
原点復帰押当てトルク
0∼200%
0.1%
40%
533
21
A1
5
×
○
○
○
○
534
原点復帰押当て時間
0∼10s
0.1s
0.5s
81
89
89
89
534
22
A2
5
×
○
○
○
○
535
位置制御端子入力選択
0、1、10、11、100、101、
110、111
1
0
85
535
23
A3
5
×
○
○
○
○
536
位置検出選択
0、1、2
1
0
24
A4
5
×
○
○
○
○
ロール送りモード選択
0、1
1
0
93
81
536
537
537
25
A5
5
×
○
○
○
○
541
速度指令符号選択(CC-Link)
0、1
1
0
−
541
29
A9
5
○
×
○
○
○
542
通信局番(CC-Link)
1∼64
1
1
−
542
2A
AA
5
○
○
○
○
○
543
ボーレート選択(CC-Link)
0∼4
1
0
−
543
2B
AB
5
○
○
○
○
○
544
547
548
549
550
551
555
556
CC-Link拡張設定
0、1、12、14、18
1
0
5
○
○
○
○
○
0∼31
2F
AF
5
○
30
B0
5
○
○
○
プロトコル選択
31
B1
5
○
○
○
32
B2
5
○
○
○
33
B3
5
○
○
○
37
B7
5
○
○
○
38
B8
5
○
○
○
○
○
○
○
○
0∼999.8s、9999
○
○
○
○
○
○
○
○
USB交信チェック時間間隔
544
547
548
549
550
551
555
556
AC
USB通信局番
−
−
−
2C
○
○
○
0、1、10、11、100、101、
110、111
0、1、10、11、100、101、
110、111
0、1、10、11、100、101、
110、111
0、1、10、11、100、101、
110、111
0、1、10、11、100、101、
110、111
0、1、10、11、100、101、
110、111
1
0
0.1s
9999
0、1
1
0
NETモード操作権選択
0、2、9999
1
9999
PUモード操作権選択
2∼4、9999
1
9999
電流平均時間
0.1∼1.0s
0.1s
1s
データ出力マスク時間
0∼20s
0.1s
0s
199
173
173
224
224
557
電流平均値モニタ信号出力基準電流
0∼500A
0.01A
モータ
定格電流
224
557
39
B9
5
○
○
○
○
○
563
564
通電時間繰越し回数
(0∼65535)
1
0
BF
5
×
0
40
C0
5
○
○
×
1
○
○
×
(0∼65535)
563
564
3F
稼動時間繰越し回数
135
135
×
×
×
パ
|
タ
一
覧
4
パ
ラ
メ
|
タ
パラメータ一覧
位置制御
機能
設定範囲
最小設定単位
初期値
速度制御積分時間
0∼20s
0.001s
0.2s
トルク制御Pゲイン
0∼200%、9999
1%
9999
トルク制御積分時間
0∼50ms、9999
0.1ms
9999
モデル速度制御ゲイン
0∼1000%
1%
60%
速度偏差時間
0∼100s
0.1s
1s
ノッチフィルタ周波数
0、10∼625Hz
1Hz
0
ノッチフィルタ深さ
0∼3
1
0
速度検出ヒステリシス
0∼180r/min
1r/min
15r/min
ノッチフィルタ広さ
0∼3
1
0
872
入力欠相保護選択
0、1
1
0
145
877
フィードフォワード制御・モデル適応制御
0∼2
選択
1
0
第1位置決め加速時間
0.01∼360s
0.01s
5s
第1位置決め減速時間
0.01∼360s
0.01s
5s
第2位置決め加速時間
0.01∼360s
0.01s
5s
第2位置決め減速時間
0.01∼360s
0.01s
5s
第3位置決め加速時間
0.01∼360s
0.01s
5s
第3位置決め減速時間
0.01∼360s
0.01s
5s
第4位置決め加速時間
0.01∼360s
0.01s
5s
第4位置決め減速時間
0.01∼360s
0.01s
5s
第5位置決め加速時間
0.01∼360s
0.01s
5s
第5位置決め減速時間
0.01∼360s
0.01s
5s
第6位置決め加速時間
0.01∼360s
0.01s
5s
第6位置決め減速時間
0.01∼360s
0.01s
5s
第7位置決め加速時間
0.01∼360s
0.01s
5s
第7位置決め減速時間
0.01∼360s
0.01s
5s
回生回避速度ゲイン
0∼200%
0.1%
100%
速度制御Dゲイン
0∼100%
0.1%
0%
速度推定Pゲイン
0∼300%、9999
1%
9999
0∼1s
0.01s
0s
低速域加速時間
0∼360s、9999
0.01s
9999
低速域減速時間
0∼360s、9999
0.01s
9999
制御方法選択
9、10、13
1
10
予備励磁選択(制動動作選択)
0、1
1
0
速度制御Pゲイン
0∼1000%
1%
100%
−
800
802
820
821
824
825
828
853
862
863
870
871
−
調整機能
−
−
付加
機能
−
フリー
回生回避機能
パラメータ
制御系機能
−
58
参照 お客様
ページ 設定値
81
81
81
81
81
81
81
81
81
81
81
81
81
81
218
79
76
117
108
108
65
114
70
70
76
76
73
74
75
75
130
75
578
579
580
581
582
583
584
585
586
587
588
589
590
591
665
698
730
736
791
792
電磁ブレーキインタロック時間
加減速
時間
−
名 称
保護
機能
調整
機能
−
パラメータ
パラメータ一覧
パラメータ
578
579
580
581
582
583
584
585
586
587
588
589
590
591
665
698
730
736
791
792
800
802
820
821
824
825
828
853
862
863
870
871
備 考
命令コード
制御モード別対応表
パラメータ
読出
書込
拡張
速度
位置
コピー
クリア
オールクリア
4E
CE
5
×
○
○
○
4F
CF
5
×
○
○
○
50
D0
5
×
○
○
○
51
D1
5
×
○
○
○
52
D2
5
×
○
○
○
53
D3
5
×
○
○
○
54
D4
5
×
○
○
○
55
D5
5
×
56
D6
5
×
57
D7
5
×
58
D8
5
×
59
D9
5
×
5A
DA
5
×
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
5B
DB
5
×
41
C1
6
×
○
62
E2
6
○
○
○
1E
9E
7
○
○
○
○
○
○
○
○
○
×
○
○
○
24
A4
7
5B
DB
7
○
○
○
○
○
5C
DC
7
○
×
○
○
○
00
80
8
○
○
○
○
02
82
8
×
○
○
○
14
94
8
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
×
×
×
×
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
19
99
8
1C
9C
8
35
B5
8
3E
BE
8
3F
BF
8
46
C6
8
47
C7
8
○
○
○
○
○
○
○
○
○
○
○
○
872
48
C8
8
○
○
○
○
○
877
4D
CD
8
○
○
○
○
○
878
879
880
881
882
883
885
886
4E
CE
8
4F
CF
8
50
D0
8
51
D1
8
○
○
○
○
52
D2
8
53
D3
8
55
D5
8
○
○
○
○
○
○
○
×
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
56
D6
8
○
×
○
○
○
15
95
8
18
98
8
878
879
880
881
882
883
885
886
速度フィードフォワードフィルタ
0∼1s
0.01s
0s
速度フィードフォワードトルク制限
0∼400%
0.1%
150%
負荷イナーシャ比
0∼200倍
0.1
7
速度フィードフォワードゲイン
0∼1000%
1%
0%
回生回避動作選択
0、1、2
1
0
回生回避動作レベル
300∼800V
0.1V
DC400V
回生回避補正速度制限値
0∼540r/min、9999
1r/min
180r/min
回生回避電圧ゲイン
0∼200%
0.1%
100%
73、
79
73
73
73
73
218
218
218
218
888
フリーパラメータ1
0∼9999
1
9999
226
888
58
D8
8
○
○
○
×
×
889
フリーパラメータ2
0∼9999
1
9999
226
889
59
D9
8
○
○
○
×
×
×
×
パ
ラ
メ
|
タ
一
覧
4
パ
ラ
メ
|
タ
パラメータ一覧
パラメータ
C0
(900)
C2
(902)
C3
(902)
125
(903)
C4
(903)
C5
(904)
C6
(904)
126
(905)
C7
(905)
990
991
名 称
設定範囲
最小設定単位
初期値
参照 お客様
ページ 設定値
パラメータ
備 考
命令コード
制御モード別対応表
パラメータ
読出
書込
拡張
速度
位置
コピー
クリア
オールクリア
5C
DC
1
○
○
○
×
○
パ
5E
DE
1
○
×
○
×
○
ラ
5E
DE
1
○
×
○
×
○
メ
5F
DF
1
○
×
○
×
○
|
5F
DF
1
○
×
○
×
○
タ
60
E0
1
○
×
○
×
○
一
60
E0
1
○
×
○
×
○
覧
61
E1
1
○
×
○
×
○
61
E1
1
○
×
○
×
○
5A
DA
9
5B
DB
9
○
○
○
○
○
○
○
×
○
○
PUブザー音制御
0、1
1
1
PUコントラスト調整
0∼63
1
58
233
233
C0
(900)
C2
(902)
C3
(902)
125
(903)
C4
(903)
C5
(904)
C6
(904)
126
(905)
C7
(905)
990
991
任意アラーム書込み
16∼18、32∼34、48、49、
64、82、96、97、112、128、
129、144、160、161、
176∼179、192、197、
199∼201、208、209、
211、221、241、246、247、
253、9999
1
9999
227
997
61
E1
9
○
○
×
×
×
Pr.CL
−
FC
−
−
−
−
−
−
ALLC
−
FC
−
−
−
−
−
−
Er.CL
−
F4
−
−
−
−
−
−
Pr.CH
−
−
−
−
−
−
−
−
FM端子校正
−
端子2速度設定バイアス速度
0∼4800r/min
端子2速度設定バイアス
0∼300%
端子2速度設定ゲイン速度
0∼4800r/min
端子2速度設定ゲイン
0∼300%
端子4速度設定バイアス速度
0∼4800r/min
端子4速度設定バイアス
0∼300%
端子4速度設定ゲイン速度
0∼4800r/min
端子4速度設定ゲイン
0∼300%
−
−
141
1r/min
0r/min
152
0.1%
0%
152
1r/min
3000r/min
152
0.1%
100%
152
1r/min
0r/min
152
0.1%
20%
152
1r/min
3000r/min
152
0.1%
100%
152
−
997
クリアパラメータ
初期値変更リスト
PU
校正パラメータ
機能
パラメータ一覧
Pr.CL
パラメータクリア
0、1
1
0
ALLC
パラメータオールクリア
0、1
1
0
Er.CL
アラーム履歴クリア
0、1
1
0
234
234
236
Pr.CH
初期値変更リスト
−
−
235
−
PUコネクタからの通信(ネットワーク運転モード)では、書込みできません。
( )内はパラメータユニット(FR-PU07)使用時のパラメータ番号です。
RS-485通信からのパラメータクリア(オールクリア)時、クリアされない通信用パラメータです。(RS-485通信については、182ページ参照 )
パスワード登録中(Pr.297 ≠“9999”)、通信オプション装着時、通信オプションからのみパラメータクリア(パスワード解除)できます。
備 考
r/min単位のパラメータの設定範囲/設定値は、Pr.144 の変更によりHz単位に変更可能です。
操作パネルからの設定は、最大9999までとなります。パラメータユニット(FR-PU07)使用時は、設定範囲の最大値まで設定
することができます。
3000r/minを超えた設定も可能ですが、実際の動作はモータの上限速度である3000r/minで制限されます。
4
パ
ラ
メ
|
タ
60
目的別パラメータ
4.3
PM センサレスベクトル制御について
65
4.3.1
PM センサレスベクトル制御の概要................................................................................................... 65
4.3.2
制御方法の変更 (Pr.800) .................................................................................................................... 65
4.4
速度制御について
68
4.4.1
速度制御の概要 ..................................................................................................................................... 68
4.4.2
速度制御ゲインの調整 (Pr.820 、 Pr.821 、 X44 信号 ) ................................................................... 70
4.4.3
速度フィードフォワード制御、モデル適応速度制御 (Pr.828、Pr.877 ∼ Pr.881) .................... 73
4.4.4
速度偏差過大 (Pr.285、Pr.853)........................................................................................................ 74
4.4.5
ノッチフィルタ (Pr.862、Pr.863、Pr.871).................................................................................... 75
4.4.6
速度推定ゲイン、電流制御ゲイン (Pr.730、Pr.824、Pr.825)..................................................... 76
4.5
位置制御について
77
4.5.1
位置制御の概要 ..................................................................................................................................... 77
4.5.2
位置制御のゲイン調整 (Pr.422、Pr.423、Pr.427、Pr.427、Pr.463、Pr.698、Pr.877) ....... 79
4.5.3
ポイントテーブル簡易位置決め機能 (Pr.4 ∼ 6、Pr.24 ∼ Pr.27、Pr.465 ∼ Pr.478、Pr.525 ∼
Pr.531、Pr.537、Pr.578 ∼ Pr.591) ............................................................................................... 81
4.5.4
位置制御の停止動作 (Pr.464、Pr.535) ............................................................................................. 85
4.5.5
押当て制御機能 (Pr.512 ∼ Pr.515 、X29 信号 )............................................................................. 87
4.5.6
位置制御原点復帰(Pr.110、Pr.111、Pr.453、Pr.455、Pr.508、Pr.509、Pr.532 ∼ Pr.534)..
89
4.5.7
電子ギアの設定 (Pr.420、Pr.421) .................................................................................................... 92
4.5.8
位置決め調整パラメータの設定 (Pr.426、Pr.506、Pr.507、Pr.510、Pr.511、Pr.536、Y36 信
号、PBSY 信号、MEND 信号、CPO 信号、FP 信号 )................................................................... 93
4.6
4.6.1
4.7
モータの出力トルク ( 電流 ) を調整する
95
トルク制限動作 (Pr.22、Pr.48、Pr.156、Pr.157) ........................................................................ 95
回転速度を制限する
98
4.7.1
上下限設定 (Pr.1、Pr.2) ..................................................................................................................... 98
4.7.2
機械共振点を避ける ( 速度ジャンプ )(Pr.31 ∼ Pr.36)................................................................... 99
4.8
外部端子による速度設定
100
4.8.1
多段速設定による運転 (Pr.4 ∼ Pr.6、Pr.24 ∼ Pr.27、Pr.232 ∼ Pr.239) .............................. 100
4.8.2
JOG 運転 (Pr.15、Pr.16、JOG 信号、JOG2 信号 ) .................................................................. 102
4.8.3
遠隔設定機能 (Pr.59) ........................................................................................................................ 105
4.9
加減速時間と加減速パターンの設定
108
4.9.1
加速時間、減速時間の設定
(Pr.7、Pr.8、Pr.20、Pr.44、Pr.45、Pr.147、Pr.375、Pr.791、Pr.792) .............................. 108
4.9.2
モータ始動速度 (Pr.13)..................................................................................................................... 111
4.9.3
加減速パターン (Pr.29)..................................................................................................................... 112
4.10 モータの選択と保護
113
4.10.1 モータの過熱保護 ( 電子サーマル )(Pr.9)....................................................................................... 113
4.11 モータのブレーキと停止動作
114
4.11.1 ゼロ速制御と予備励磁、サーボオン、サーボロック (Pr.10、Pr.11、Pr.802、LX 信号、SON 信
号 ) ....................................................................................................................................................... 114
62
4.11.2 電磁ブレーキを動作させる (MBR 信号、Pr.736) ........................................................................ 117
4.11.3 回生ブレーキの選択 (Pr.30 、 Pr.70)............................................................................................... 118
4.11.4 停止選択 (Pr.250) ............................................................................................................................. 119
4.12 外部端子の機能割付と制御
120
4.12.1 入力端子機能選択 (Pr.178 ∼ Pr.184)............................................................................................ 120
4.12.2 ドライブユニット出力遮断信号 (MRS 信号、Pr.17) .................................................................... 122
4.12.3 第 2 機能選択信号 (RT) の動作条件選択 (RT 信号 ) .................................................................... 123
4.12.4 始動信号動作選択 (STF、STR、STOP 信号、Pr.250)............................................................... 124
4.12.5 出力端子機能選択 (Pr.190 ∼ Pr.192)............................................................................................ 126
4.12.6 回転速度の検出 (SU、FU 信号、Pr.41 ∼ Pr.43、Pr.870)......................................................... 130
4.12.7 出力電流の検出機能 (Y12 信号、Y13 信号、Pr.150 ∼ Pr.153)................................................ 131
4.12.8 リモート出力機能 (REM 信号、Pr.495、Pr.496) ........................................................................ 133
4.13 モニタ表示とモニタ出力信号
134
4.13.1 回転速度表示と回転数設定 (Pr.37、Pr.144)................................................................................. 134
4.13.2 DU/PU、端子 FM のモニタ表示選択
(Pr.52、Pr.54、Pr.170、Pr.171、Pr.268、Pr.430、Pr.563、Pr.564) ................................. 135
4.13.3 端子 FM( パルス列出力 ) の基準について (Pr.55、Pr.56) .......................................................... 140
4.13.4 端子 FM 校正 ( 校正パラメータ C0(Pr.900))................................................................................ 141
4.14 異常発生時の動作設定
143
4.14.1 リトライ機能 (Pr.65、Pr.67 ∼ Pr.69) .......................................................................................... 143
目
的
別
パ
ラ
4.14.2 入出力欠相保護選択 (Pr.251、Pr.872).......................................................................................... 145
メ
4.14.3 始動時地絡検出有無 (Pr.249) .......................................................................................................... 145
|
4.14.4 過速度検出 (Pr.374) ......................................................................................................................... 146
4.15 アナログ入力 ( 端子 2、4) による速度設定
147
タ
4.15.1 アナログ入力選択 (Pr.73、Pr.267) ................................................................................................ 147
4.15.2 速度設定をアナログで行う ( 電圧入力 / 電流入力 ) ...................................................................... 150
4.15.3 アナログ入力の応答性やノイズ除去 (Pr.74) ................................................................................. 151
4.15.4 速度設定電圧 ( 電流 ) のバイアスとゲイン
(Pr.125、Pr.126、Pr.241、C2(Pr.902) ∼ C7(Pr.905)) ......................................................... 152
4.16 誤操作防止とパラメータ設定の制限
157
4
4.16.1 リセット選択/ PU 抜け検出/ PU 停止選択 (Pr.75) .................................................................. 157
4.16.2 パラメータ書込禁止選択 (Pr.77)..................................................................................................... 160
4.16.3 逆転防止選択 (Pr.78) ........................................................................................................................ 161
4.16.4 拡張パラメータの表示 (Pr.160) ...................................................................................................... 161
4.16.5 パスワード機能 (Pr.296、Pr.297) ................................................................................................. 162
4.17 運転モードと操作場所の選択
165
4.17.1 運転モード選択 (Pr.79) .................................................................................................................... 165
4.17.2 電源投入時の運転モードについて (Pr.79、Pr.340) ..................................................................... 172
4.17.3 通信運転時の始動指令権と速度指令権 (Pr.338、Pr.339、Pr.550、Pr.551) .......................... 173
4.18 通信運転と設定
179
4.18.1 PU コネクタの配線と構成 ................................................................................................................ 179
63
パ
ラ
メ
|
タ
4.18.2 RS-485 通信の初期設定と仕様 (Pr.117 ∼ Pr.120、Pr.123、Pr.124、Pr.549) .................... 182
4.18.3 通信異常時の動作選択 (Pr.121、Pr.122、Pr.502) ...................................................................... 183
4.18.4 通信 EEPROM 書込みの選択 (Pr.342) ........................................................................................... 186
4.18.5 三菱インバータプロトコル ( 計算機リンク通信 ) について .......................................................... 187
4.18.6 Modbus-RTU 通信仕様 (Pr.117、Pr.118、Pr.120、Pr.122、Pr.343、Pr.502、Pr.549).. 199
4.19 特殊な運転や回転速度制御
211
4.19.1 PID 制御 ( 速度制御 )(Pr.127 ∼ Pr.134) ....................................................................................... 211
4.19.2 回生回避機能 (Pr.665、Pr.882、Pr.883、Pr.885、Pr.886) ..................................................... 218
4.20 便利な機能
220
4.20.1 ドライブユニット部品の寿命表示 (Pr.255 ∼ Pr.259) ................................................................. 220
4.20.2 メンテナンスタイマ警報 (Pr.503、Pr.504) .................................................................................. 223
4.20.3 電流平均値モニタ信号 (Pr.555 ∼ Pr.557) .................................................................................... 224
4.20.4 フリーパラメータ (Pr.888、Pr.889) .............................................................................................. 226
4.20.5 任意のアラームを発生させる (Pr.997) ........................................................................................... 227
4.21 パラメータユニット、操作パネルの設定
228
4.21.1 RUN キー回転方向選択 (Pr.40) ....................................................................................................... 228
4.21.2 M ダイヤルボリュームモード / キーロック操作選択 (Pr.161).................................................... 229
4.21.3 速度変化量設定 (Pr.295) .................................................................................................................. 232
4.21.4 ブザー音制御 (Pr.990) ...................................................................................................................... 233
4.21.5 PU コントラスト調整 (Pr.991)........................................................................................................ 233
64
4.22 パラメータクリア、オールクリア
234
4.23 初期値変更リスト
235
4.24 アラーム履歴の確認とクリア
236
PMセンサレスベクトル制御について
4.3 PMセンサレスベクトル制御について
4.3.1
PMセンサレスベクトル制御の概要
誘導モータと比べて高効率な、専用のPM(磁石)モータとの組合せにより、高効率で速度制御精度の高いモータ制御が可能です。
エンコーダなどの速度検出器を用いず、ドライブユニットの出力電圧と出力電流から、モータの回転速度を検出し、高精度な速
度制御、位置制御が可能です。
PMセンサレスベクトル制御のイメージ図
出力
ドライブユニット
速度指令
電圧
インバータ
コントローラ
回路
適応磁束オブザーバ ∗
速度/
磁極位置
出力
電流
仮想モータモデル
適応磁束オブザーバとは、ドライブ
ユニット内部に仮想モータモデル
を持ち、モータの電圧および電流か
らモータの速度/磁極位置を検出
する制御方式です。
ポイント
下記条件を満たさない場合には使用できません。
モータ種類が、専用PMモータであること。
モータ容量とドライブユニット容量が指定の組合せであること。
単機運転(ドライブユニット1台に対しモータが1台)であること。
モータとの接続は、配線長が30m以下であること。
注 記
低速域(約100r/min以下)では、モータのコギングトルクにより、回転むらが発生します。
磁極位置検出のため始動指令(STF、STR)をONしてから、RUN信号が出力されるまで約100msの遅れが発生します。
4.3.2
制御方法の変更(Pr.800)
速度制御、位置制御の制御モードを選択します。
速度制御は、速度指令と実際のモータ回転速度(推定速度)が一致するように制御します。
位置制御は、位置指令と現在位置の差をゼロにするように速度指令を計算し、モータを回転させます。
パラメータ
名 称
番号
800
制御方法選択
初期値
設定範囲
動作
9
PMモータテスト運転(速度制御)(モータを接続しても、モータは回転しません。)
10
10
通常運転(速度制御)
13
通常運転(位置制御)
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
(1)
PMモータテスト運転(Pr.800 = “9”)
4
PMモータを接続せずに、速度の動きをモニタやアナログ信号出力で確認することができます。
PMモータを接続して実際に運転するモードとPMモータを接続せずに、模擬的な仮想運転を行う運転モードをパラメータ
によって選択することができます。
Pr.800 制御方法選択 =“9”に設定すると、速度制御のPMモータテスト運転が有効になります。
PU運転/外部運転/ネットワーク運転の各運転モードで速度指令と始動指令を与えることで、テスト運転が可能です。
回転速度
(FM出力)
時間
STF
RUN
備 考
テスト運転では電流検出、電圧出力は行わないので、出力電流、出力電圧に関係するモニタは“0”となります。
65
パ
ラ
メ
|
タ
PMセンサレスベクトル制御について
(2)
テスト運転時の入出力端子機能選択の有効/無効
入力信号
機能
信号名
出力信号
機能
信号名
RL
低速運転指令
○
RUN
ドライブユニット運転中
○
RM
中速運転指令
○
SU
速度到達
○
RH
高速運転指令
○
OL
過負荷警報
×
RL
遠隔設定(設定クリア)
○
FU
回転速度検出
○
RM
遠隔設定(減速)
○
RBP
回生ブレーキプリアラーム
○
RH
遠隔設定(加速)
○
THP
電子サーマルプリアラーム
×
RT
第2機能選択
○
RY
ドライブユニット運転準備完了
○
AU
端子4入力選択
○
Y12
出力電流検出
○
JOG
JOG運転選択
○
Y13
ゼロ電流検出
○
外部サーマル入力
○
FDN
PID下限リミット
○
○
FUP
PID上限リミット
○
○
RL
PID正転逆転出力
○
電磁ブレーキインタロック
フィン過熱プリアラーム
○
○
OH
REX
X10
15速選択
(RL、RM、RHの3速と組合わせ)
インバータ運転許可信号
(FR-HC2/FR-CV接続)
X12
X14
PU運転外部インタロック
PID制御有効
○
○
MBR
FIN
X16
PU-外部運転切換
○
RY2
運転準備完了2
○
LX
予備励磁
○
Y36
位置決め完了
×
MRS
出力停止
○
MEND
STOP
始動自己保持選択
○
PID
X29
JOG2
X44
移動完了
×
PID制御動作中
○
粗一致
×
押し当て制御切換
×
CPO
JOG運転選択2
○
ZA
原点復帰異常警報
×
P制御選択(P/PI制御切換え)
×
FP
位置検出
×
STF
正転指令
○
PBSY
位置指令動作中
×
STR
逆転指令
○
ZP
原点復帰完了
×
RES
インバータリセット
○
Y64
リトライ中
○
X65
PU-NET運転切換
○
Y90
寿命警報
○
X66
外部-NET運転切換
○
Y91
異常出力3(電源遮断信号)
○
X67
指令権切換
○
Y93
電流平均値モニタ信号
○
X76
近点ドグ
×
Y95
メンテナンスタイマ信号
○
X86
サーボON
○
REM
リモート出力
○
X87
位置制御急停止
×
LF
軽故障出力
○
LSP
正転リミットセンサ
○
ALM
異常出力
○
LSN
逆転リミットセンサ
○
9999
機能なし
−
9999
機能なし
−
○:有効
×:無効
66
PMセンサレスベクトル制御について
(3)
テスト運転時のモニタ出力の有効/無効
操作パネル/PU
モニタ表示
FM
出力
通信
回転速度
○
○
○
出力電流
×
×
×
出力電圧
×
×
×
異常表示
○
―
○
速度設定値
コンバータ出力電圧
○
○
○
○
○
○
モニタの種類
回生ブレーキ使用率
○
○
○
電子サーマル負荷率
×
×
×
出力電流ピーク値
×
×
×
コンバータ出力電圧ピーク値
○
○
○
出力電力
×
×
×
位置パルス
積算通電時間
×
○
×
×
○
基準電圧出力
―
○
―
実稼働時間
○
―
○
モータ負荷率
×
×
×
積算電力
△
―
△
位置指令(上位/下位)
×
×
×
現在位置(上位/下位)
×
×
×
×
―
溜りパルス(上位/下位)
×
×
理想速度指令
×
×
速度指令
○
○
○
PID目標値
○
○
○
PID測定値
○
○
○
PID偏差
○
―
○
入力端子状態
―/○
―
○
出力端子状態
―/○
―
○
ドライブユニット入出力端子モニタ
○/―
―
―
モータサーマル負荷率
×
×
×
ドライブユニットサーマル負荷率
×
×
×
―
―
△
積算電力(通信用0.01kWh単位)
○:有効
×:無効(常時0を表示)
△:テスト運転前の積算値を出力
―:モニタ無し
モニタ出力はモニタの種類(操作パネル表示、パラメータユニット画面、端子FM)により出力可否が違います。詳細は135ページを参照してください。
テスト運転に切換えると 0 表示となります。テスト運転を終了し再度 PM センサレスベクトル制御にした場合は、前回運転時の出力電流ピーク値、
モータサーマル負荷率、ドライブユニットサーマル負荷率および電子サーマル負荷率を表示します。
参照パラメータ
Pr.52 DU/PUメイン表示データ選択 Pr.178∼Pr.184 (入力端子機能選択) Pr.190∼Pr.192 (出力端子機能選択) 4
135ページ参照
120ページ参照
126ページ参照
パ
ラ
メ
|
タ
67
速度制御について
4.4 速度制御について
目的
設定が必要なパラメータ
速度制御のゲイン調整
ゲインの調整
速度フィードフォワード
制御、モデル適応速度制
御
ノッチフィルタ
ゲインの調整
速度指令の変化に対しモータの追従性
をよくする
機械共振を避ける
PMモータ制御時のゲイン調整
4.4.1
(1)
参照ページ
Pr.820、Pr.821
70
Pr.828、Pr.877∼Pr.881
73
Pr.862、Pr.863、Pr.871
Pr.730、Pr.824、Pr.825
75
76
速度制御の概要
制御ブロック図
AU
端子2バイアス【C2、C3(Pr.902)】
端子2ゲイン【Pr.125、C4(Pr.903)】
AU
端子4バイアス【C5、C6(Pr.904)】
端子4ゲイン【Pr.126、C7(Pr.905)】
端子2
端子4
運転モード
【Pr.79】
アナログ
入力選択
【Pr.73】
速度設定
フィルタ
【Pr.74】
RL
多段速選択
【Pr.4∼6、
24∼27、
232∼239】
RM
RH
REX
オプション
操作パネル
加減速処理
上下限設定
【Pr.1】
運転中
A
【Pr.2】
停止中
【Pr.7】 【Pr.8】
サーボロック
ゼロ速制御
【Pr.802=1】
SON/LX
【Pr.802=0】
減速停止時
【Pr.11】
速度フィードフォワード制御
負荷イナーシャ比
J・s
【Pr.880】
速度フィード
速度フィード
フォワード
フォワード
トルク制限【Pr.879】 フィルタ【Pr.878】
速度フィード
フォワードゲイン
【Pr.881】
モデル適応速度制御
J【Pr.880】
トルク係数
モデル速度演算
【Pr.877=1】
A
+
【Pr.877=2】 【Pr.877=0】
モデル速度
制御ゲイン
【Pr.828】
1
J・s
+
-
速度制御
Pゲイン
【Pr.820】
+
X44
0
速度制御
積分時間
【Pr.821】
X44 積分0クリア
ノッチ
+
フィルタ
【Pr.862】
+
【Pr.863】
【Pr.871】
【Pr.22】
+
トルク
制御
【Pr.824】
【Pr.825】
RT
【Pr.48】
速度推定
【Pr.730】
68
トルク制限
RT
モータ
速度制御について
(2)
モデル適応制御とフィードフォワード制御
モデル適応制御とは、設定された負荷イナーシャをもとに理想モデル部と実ループ部のゲインを個別に設定し、指令には高
応答で、機械には安定となるような設定を行うことができる制御ロジックです。
理想モデル部は、機械の外乱、ガタなどがないため、各ゲインは高応答化しても良好な特性を示します。
実ループ部(外乱抑制部)では、PI制御に基づき設計されており、外乱トルクにより、理想モデル部で作られたモデル速度と
実際のモータ速度に誤差が生じた場合、実ループ部よりモデル速度に追従すべく実ループ側からトルク指令が出されます。
外乱に対する抑制効果をあげるためには、ゲインを高く設定しますが、あまり上げすぎると振動の原因になります。
また、理想モデル部は負荷イナーシャをもとに動作するため、設定する負荷イナーシャが実際の負荷イナーシャと異なる場
合は正しく制御できない場合があります。
理想モデル部(指令応答を設定)
位置ゲイン1
指令
位置
速度
位置ゲイン2
位置
速度ゲイン1
理想モータ 負荷イナーシャ比
電流
速度ゲイン2
速度
M
負荷
実際のモータ
電流
M
負荷
速度・
位置制御部
実ループ部(外乱抑制部)
フィードフォワード制御では、位置フィードフォワードは位置追従に必要な速度指令、速度フィードフォワードは加減速に
必要なトルク電流指令をあらかじめ演算し、指令に加算します。通常のゲイン調整のみで応答をあげられない場合にフィー
ドフォワード制御を入れることで応答を高めることができます。
設定する負荷イナーシャが実際の負荷イナーシャと異なる場合やフィードフォワードゲインを上げすぎると、振動が発生し
たり正しく制御できない場合があります。
4
パ
ラ
メ
|
タ
69
速度制御について
4.4.2
速度制御ゲインの調整 (Pr.820、Pr.821、X44信号)
負荷イナーシャが大きいとき、ギヤバックラッシュがあるときなどで、振動、騒音など好ましくない現象が発生す
る場合や、機械に合わせて最良の性能を発揮させたい場合には、手入力によるゲイン調整をしてください。
パラメータ
名 称
番号
初期値
設定範囲
100%
0∼1000%
動作
速度制御の比例ゲインを設定します。(設定値を大きくすると速度指令の
820
速度制御Pゲイン
変化に対する追従性が良くなり、負荷変動に対する速度変動が小さくな
ります。)100%は200rad/sに相当します。
821
速度制御積分時間
0.2s
0∼20s
速度制御の積分時間を設定します。(負荷変動に対する速度変動が生じた
場合、設定値を小さくし元の速度に戻るまでの時間を短くします。)
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
(1)
制御ブロック図
Pr.820 速度制御Pゲイン
速度指令
+
+
速度
比例演算
−
トルク
制御
Pr.821 速度制御積分時間 +
X44
モータ
速度
積分演算
推定速度
積分0クリア
0
X44
速度推定器
(2)
P/PI 制御の切換え(X44信号)
Pゲインと積分時間でのゲイン調整を行う場合の積分時間(I)の足し込みをする/しないを、P/PI制御切換信号(X44)に
より行えます。位置制御時は、X44信号は無効です。(常時PI制御となります。)
X44信号OFFの時・・・・PI制御
X44信号ONの時・・・・・P制御
44”を設定して機能を割り付けてください。
X44信号入力に使用する端子は、Pr.178∼Pr.184(入力端子機能選択)に ”
(3)
手入力による速度制御ゲイン調整
機械の異常振動、騒音、応答性が鈍い、オーバーシュートが発生するなどの現象が生じた場合に調整します。
Pr.820 速度制御Pゲイン の設定値を上げると応答性は上がりますが、上
げすぎると振動や異音が発生します。
Pr.821 速度制御積分時間 を下げると速度変化時の復帰時間が短くなり
ますが、下げすぎるとオーバーシュートが発生します。
モータ単体での
速度応答
200rad/s
30rad/s
15%
100%
Pr.820
設定値
負荷イナーシャが付いた場合、実際の速度応答は、以下のようになります。
実際の速度応答= モータ単体のときの速度応答×
JM
JM+JL
JM:モータのイナーシャ
JL:モータ軸換算の負荷イナーシャ
負荷変動
回転速度
比例ゲインを上げると応答性が上がる
ため、この速度変動が小さくなります。
積分時間を小さくするとこの復帰時間が短くなります。
70
速度制御について
調整手順は、
1) 実際の速度応答が100rad/s∼200rad/sとなるようにPr.820 を変更します。
(例)2倍の負荷イナーシャで実際の速度応答を200rad/sとする場合
実際の速度応答=モータ単体での速度応答×
200rad/s=モータ単体での速度応答×
JM
JM:モータのイナーシャ
JL:モータ軸換算の負荷イナーシャ
JM+JL
JM
JM+2×JM
モータ単体での速度応答= 200rad/s×3=600rad/s
→Pr.820 =300%を設定。
2) 実際の速度応答の1/20倍∼1/5倍の逆数の時間をPr.821 に設定します。
(例1)実際の速度応答を200rad/sとし、Pr.821 を速度応答の1/20倍の設定とする場合
1
Pr.821 =
200rad/s×
1
20
=0.100s
3) モータ回転速度やトルク電流指令が振動していないか確認してください。
振動が発生している場合は、実際の速度応答を下げて、再設定してください。
また、必要に応じ、以下の要領で調整を行ってください。
No.
1
2
3
4
5
現象・条件
調整方法
Pr.820、Pr.821 の設定値を高めに設定します。
回転速度の立ち上がりが鈍い時、設定値を10%ずつ上げていき、振動・騒音が発生する直
前の設定値×0.8∼0.9程度の値を設定します。
オーバーシュートする場合、現在の設定値から2倍ずつ大きくしていき、オーバーシュート
Pr.821
しなくなる設定値×0.8∼0.9程度の値を設定します。
Pr.820 の設定値を低め、Pr.821 の設定値を高めに設定します。
設定値を10%ずつ下げていき、振動・騒音が発生しなくなる直前の設定値×0.8∼0.9程度
機械系から振動・
Pr.820
の値を設定します。
騒音が発生する。
オーバーシュートする場合、現在の設定値から2倍ずつ大きくしていき、オーバーシュート
Pr.821
しなくなる設定値×0.8∼0.9程度の値を設定します。
Pr.820 の設定値を高めに設定します。
応答が悪い
回転速度の立ち上がりが鈍い時、設定値を5%ずつ上げていき、振動・騒音が発生する直前
Pr.820
の設定値×0.8∼0.9程度の値を設定します。
Pr.821 を低めに設定します。
復帰時間(応答時間)が長い
Pr.821 の設定を現在の設定値から1/2ずつ小さくしていき、オーバーシュートあるいは不
安定現象が発生しなくなる直前の設定値×0.8∼0.9程度の値を設定します。
Pr.821
を高めに設定します。
オーバーシュート
あるいは不安定現
Pr.821 の設定を現在の設定値から2倍ずつ大きくしていき、オーバーシュートあるいは不安定現象が
象が発生する。
発生しなくなる直前の設定値×0.8∼0.9程度の値を設定します。
負荷イナーシャが
大きい
Pr.820
4
パ
ラ
メ
|
タ
71
速度制御について
(4)
トラブルシューティング
現象
1
2
3
4
正しい速度で運転しない。
(速度指令と実回転速度がずれる)
速度指令まで速度が上がらない。
モータの回転速度が安定しない。
モータあるいは機械がハンチング(
振動・騒音が発生)する。
原因
対策
(1) 指令装置からの速度指令が
(1) 指令装置から正しい速度指令がきているか確認する。
ずれている。
(ノイズ対策を行ってください。)
ノイズが速度指令に重畳し
ている。
(2) 速度指令値とドライブユ
(2) 速度指令バイアス・ゲインPr.125、Pr.126、C2∼C4
を再調整する。
ニット認識値がずれている。
(1) トルク不足。
トルク制限動作が動作して
いる。
(1) -1 トルク制限動作レベルを上げる。(95ページ参照)
(1) -2 容量不足
(2) P(比例)制御のみになってい
る。
(2) P(比例)制御では負荷が重いと、速度偏差が生じますの
でPI制御にしてください。
(1) 速度指令が変動する。
(1) 指令装置から正しい速度指令がきているか確認する。
(ノイズ対策を行ってください。)
(2) トルク不足。
(2) トルク制限動作レベルを上げる。(95ページ参照)
(3) 速度制御ゲインが機械に
合っていない。(共振してい
る。)
(3) Pr.820、Pr.821 を調整する。(70ページ参照)
(1) 速度制御ゲインが高い。
(1) Pr.820 を下げ、Pr.821 を上げる。
(2) モータ配線が間違っている
(2) 配線を確認する。
加減速時間が設定と合わない。
(1) トルク不足。
(2) 負荷イナーシャが大きい。
(1) トルク制限動作レベルを上げる。(95ページ参照)
(2) 負荷に見合った加減速時間設定とする。
(1) Pr.820、Pr.821 を調整する。(70ページ参照)
6
機械の動きが安定しない。
(1) 速度制御ゲインが機械に
合っていない。
(2) ドライブユニットの加減速
時間のため応答性が悪い。
7
低速時の回転むらがある。
速度制御ゲインが低い。
Pr.820 を上げる。
5
72
(2) 加減速時間を最適値にする。
速度制御について
4.4.3
速度フィードフォワード制御、モデル適応速度制御(Pr.828、Pr.877∼Pr.881)
パラメータの設定により、速度フィードフォワード制御、モデル適応速度制御の選択を行います。
速度フィードフォワード制御では、速度指令の変化に対しモータの追従性を良くすることができます。
モデル適応速度制御では速度の追従性と、モータの外乱トルクの応答性を個別調整が可能となります。
パラメータ
名 称
番号
828
877
878
879
880
881
(1)
モデル速度制御ゲイン
初期値
設定範囲
60%
0∼1000%
フィードフォワード制御・
モデル適応制御選択
0
内 容
モデル速度制御器用ゲインを設定します。
0
通常の速度制御を行います。
1
速度フィードフォワード制御を行います。
2
モデル適応速度制御が有効になります。
速度指令と負荷イナーシャ比で計算された速度
速度フィードフォワード
フィルタ
0s
0∼1s
フィードフォワードの結果に対する1次遅れフィル
タを設定します。
速度フィードフォワード
トルク制限
負荷イナーシャ比
速度フィードフォワード
ゲイン
150%
0∼400%
7倍
0∼200倍
0%
速度フィードフォワードトルクの最大値を制限しま
す。
モータに対する負荷イナーシャ比を設定します。
速度フィードフォワードの演算結果をゲインとして
0∼1000%
設定します。
速度フィードフォワード制御(Pr.877 =“1”)
Pr.880 で負荷イナーシャ比を設定し、設定したイナーシャに対し加速、減速指令に応じた必要なトルクを演算し、
すばやくトルクを発生させます。
速度フィードフォワードゲイン100%のとき速度フィードフォワードの演算結果をそのまま反映します。
速度指令が急変する場合、速度フィードフォワード演算によりトルクが大きくなります。Pr.879 で速度フィードフォ
ワードのトルク最大値を制限します。
Pr.878 で速度フィードフォワードの結果を1次遅れのフィルタでなまらせることも可能です。
【ブロック図】
速度フィードフォワード制御
負荷イナーシャ
比
J・s
【Pr.880】
速度指令
+
−
速度フィード
フォワード
ゲイン
【Pr.881】
【Pr.878】
【Pr.879】
速度フィード 速度フィード
フォワード
フォワード
フィルタ
トルク制限
+
+
速度制御
Pゲイン
【Pr.820】
実速度制御器
トルク制御
M
+
速度制御
積分時間
【Pr.821】
4
速度推定器
パ
ラ
メ
|
タ
73
速度制御について
(2)
モデル適応速度制御(Pr.877 =“2”)
モータのモデル速度を演算しモデル側の速度制御器にフィードバックをかけます。
またこのモデル速度を実際の速度
制御器の指令とします。
Pr.880 のイナーシャ比はモデル側のモータ速度の演算と速度制御器によるトルク電流指令値の計算時に使用します。
実際の速度制御器の出力にモデル側の速度制御器のトルク電流指令を加えiq電流制御の入力とします。
モデル側の速度制御はPr.828 を用い(P制御)、実際の速度制御器はPr.820 を用います。
【ブロック図】
モデル適応速度制御
J
トルク係数
(J:
【Pr.880】)
+
速度指令
−
モデル速度制御
ゲイン
【Pr.828】
+
1
J・s
−
モデル速度演算
+
+
速度制御
Pゲイン
【Pr.820】
トルク制御
M
+
速度制御
積分時間
【Pr.821】
実速度制御器
速度推定器
4.4.4
速度偏差過大(Pr.285、Pr.853)
パラメータ
名 称
番号
285
初期値
速度偏差過大検出速度
9999
設定範囲
内 容
9999
速度偏差過大なし
0∼360r/min
速度制御時に速度指令値と実際の回転速度の差(絶対
値)がPr.285 速度偏差過大検出速度 の設定値以上に
853
速度偏差時間
1s
なる状態がPr.853 速度偏差時間 にて設定した時間
0∼100s
以上継続した場合、速度偏差過大となり、E.OSDを
表示し停止します。
負荷トルクが大き過ぎる場合など、設定速度と実回転速度の偏差が大きい場合に、速度偏差過大アラーム(E.OSD)を発生
させてアラーム停止することができます。
回転速度
(r/min)
Pr.285
設定速度
実際の回転速度
時間
Pr.853
異常出力
(A-C間)
OFF
ON
速度偏差大
エラー動作(E.OSD)
注 記
位置制御時、速度偏差過大は無効です。
74
速度制御について
4.4.5
ノッチフィルタ(Pr.862、Pr.863、Pr.871)
機械系の共振周波数帯域の速度制御の応答性を下げ、機械共振を避けることができます。
パラメータ
番号
名 称
初期値
設定範囲
内 容
0
ノッチフィルタ無効
862
ノッチフィルタ周波数
0
863
871
ノッチフィルタ深さ
ノッチフィルタ広さ
0
0∼3
0(深い)→3(浅い)
0
0∼3
0(狭い)→3(広い)
10∼625Hz
抑制したい共振周波数を設定
Pr.862 ノッチフィルタ周波数 に機械共振周波数を設定し、Pr.863 ノッチフィルタ深さ とPr.871 ノッチフィルタ広さ を
調整することにより、機械共振周波数を抑制します。
機械共振の周波数がわからない場合は、ノッチ周波数を高い方から順番に下げてください。振動が最も小さくなった点が
最適なノッチ周波数の設定です。
Pr.863 ノッチフィルタ深さ は、深い方が機械共振を抑える効果がありますが、位相遅れは大きくなりますので、逆に振
動が大きくなる場合があります。浅い方から順番に調整してください。
Pr.871 ノッチフィルタ広さ は、広い方が機械共振を抑える効果がありますが、位相遅れは大きくなりますので、逆に振
動が大きくなる場合があります。狭い方から順番に調整してください。
ゲイン
Pr.862 ノッチフィルタ周波数
0dB
周波数
Pr.863 ノッチフィルタ深さ
Pr.871 ノッチフィルタ広さ
4
パ
ラ
メ
|
タ
75
速度制御について
4.4.6
速度推定ゲイン、電流制御ゲイン(Pr.730、Pr.824、Pr.825)
モータや機械の異常振動・騒音・過電流が発生するなどの現象が生じた場合に調整します。
パラメータ
名 称
番号
(1)
初期値
730
速度推定Pゲイン
9999
824
トルク制御Pゲイン
9999
825
トルク制御積分時間
9999
設定範囲
0∼300%
9999
0∼200%
9999
0∼50ms
9999
動作
速度推定器の比例ゲインを設定します。
0.1K;200%、0.2K∼0.4K;125% が設定されます。
電流ループ比例ゲインを設定します。
0.1K;200%、0.2K∼0.4K;125% が設定されます。
電流ループ積分補償時間を設定します。
0.1K;200%、0.2K∼0.4K;125% が設定されます。
速度推定Pゲイン(Pr.730)
100%を200rad/sとして、速度推定器の比例ゲインを設定します。
設定値を大きくすると速度指令の変化に対する追従性が良くなり、外乱に対する速度変動が小さくなります。
(2)
トルク制御Pゲイン(Pr.824)
電流ループ比例ゲインは、100%が1000rad/sに相当します。
一般に調整する場合は、50∼200%の範囲を目安に設定してください。
比例ゲインを設定します。
設定値を大きくすると電流指令の変化に対する追従性が良くなり、外乱に対する電流変動が小さくなりますが、設定
値を大きくしすぎると不安定になり、高周波のトルク脈動が発生します。
(3)
電流制御積分時間(Pr.825)
電流制御の積分時間を設定します。
設定値を小さくすると外乱に対する電流変動が生じた場合、元の電流値に戻るまでの時間が短くなります。
(4)
調整手順
一般的に速度制御ゲインの調整は、Pr.820、Pr.821で行い、Pr.730 、Pr.824 、Pr.825 は設定値“9999(初期値)”に
て使用してください。
モータや機械から異常振動・騒音・異常電流・過電流が発生するなどの現象が生じ、調整を行う場合は以下としてくだ
さい。
1)状況を確認しながら、Pr.824 を変更します。
2)うまく調整できない場合、Pr.825 を変更し、再度1)を繰り返してください。
調整方法
Pr.824 を低め、Pr.825 を長めに設定します。まずPr.824 を低くし、モータの異常振動・騒音、電流を確認します。それで
も改善しない場合Pr.825 を長くします。
Pr.824
Pr.825
76
設定値を10%ずつ低くしていき、異常騒音や異常電流が改善する直前の設定値×0.8∼0.9程度の値を設
定します。
低すぎると、電流リップルが発生し、それに同期した音がモータから発生しますので、ご注意ください。
現在の設定値から2倍ずつ長くしていき、異常騒音や異常電流が改善する直前の設定値×0.8∼0.9程度の
値を設定します。
長すぎると、電流リップルが発生し、それに同期した音がモータから発生しますので、ご注意ください。
位置制御について
4.5 位置制御について
目的
設定が必要なパラメータ
パラメータ設定による簡易位置制御
パラメータ位置指令
位置制御中の停止動作
より正確な位置決め動作
急停止、ストロークエンド
押当て制御機能
位置制御の原点復帰方法を選択する
位置制御原点復帰
位置指令と実移動量を関連付ける
電子ギアの設定
位置決め調整パラメータ
の設定
位置制御の精度を上げる
位置制御のゲイン調整
速度制御のゲイン調整
4.5.1
参照ページ
Pr.4∼6、Pr.24∼Pr.27、
Pr.465∼Pr.478、
Pr.525∼Pr.531、Pr.537、
Pr.578∼Pr.591
Pr.464、Pr.535
Pr.512∼Pr.515
Pr.110、Pr.111、Pr.453、Pr.455、
Pr.508、Pr.509、Pr.532∼Pr.534
Pr.420、Pr.421
Pr.426、Pr.506、Pr.507、
Pr.510、Pr.511、Pr.536
Pr.422、Pr.423、Pr.427、Pr.446、
Pr.463、Pr.698、Pr.877
Pr.820、Pr.821
81
85
87
89
92
93
79
70
位置制御の概要
位置制御は、位置指令と現在位置の差をゼロにするように速度指令を計算し、モータを回転させます。
(1)
位置制御仕様
項目
仕様
位置指令入力方式
指令方式
ポイントテーブル方式
インターフェース
入力端子選択、RS-485通信、CC-Link通信(内蔵オプション)
点数
7点
指令データ設定範囲
-99999999∼99999999
指令設定方式
符号付絶対位置指令、符号付増分値指令
電子ギア比
1/900∼900
原点復帰方式
データセット式、押当て方式、原点無視(サーボオン位置原点)、カウント式前端基準
モータ内部指令分解能
5120〔pulses/rev〕
位置決め精度
±1.8°(機械角:200〔pulses/rev〕の分解能相当)
その他位置決め機能
急停止機能、ストロークエンド検出機能、ロール送りモード、JOG運転、押当て制御機能、パルスモ
ニタ選択機能、位置制御回転方向選択機能
電源をOFF、SON信号(もしくはLX信号)をOFFすると位置は不定となりますので、電源をON後、SON信号(もしくはLX信号)ON後は必ず原点復帰動作を
行ってください。(ロール送りモードは原点復帰動作は不要です。)
(2)
制御ブロック図
位置データ表示の扱い
【電子ギア前】
∗
RH信号
RM信号
RL信号
速度指令作成
ポイント
テーブル
選択
目標位置【電子ギア前】
移動量
作成
位置指令
【電子ギア前】 +
-
位置フィード
フォワードゲイン
Pr.423
理想速度指令
【電子ギア後】
位置指令
【電子ギア後】
電子ギア
Pr.420
Pr.421
溜りパルス
【電子ギア前】
モデル適応制御(Pr.877=2)
モデル位置制御
ゲイン Pr.446
+
+
-
+
-
1
J・s
-
パ
ラ
メ
|
タ
負荷イナーシャ比
Pr.880
モデル位置
溜りパルス
【電子ギア後】
4
モデル速度制御
モデル速度演算
ゲイン Pr.828
J
トルク係数
モデル速度
積分
∗位置制御時には、PU運転モードは選択できません。
0
Pr.877
=1
Pr.877
=0、1
現在位置
【電子ギア前】
-1
電子ギア
Pr.421
Pr.420
2 0
速度フィード
フォワードゲイン
Pr.881
=2
+
位置制御ゲイン
Pr.422
+
+
-
-
現在位置
【電子ギア後】
速度制御Pゲイン
Pr.820
0
Pr.877
=1
2 0
+
+
速度制御積分時間 +
Pr.821
+
積分
+
速度制御Dゲイン
Pr.698
トルク
制御
モータ
微分
積分
推定速度
77
位置制御について
(3)
端子結線例
シンクロジック
主回路端子
制御回路端子
*1. DCリアクトル(FR-HEL)
DCリアクトルを接続する場合、P1-P/+間の短
絡片を外してください。
ブレーキユニット
(オプション)
*1
R
PR
短絡片
NFB
P1
MC
R/L1
S/L2
T/L3
3相交流電源
*4 ブレーキ抵抗器(FR-ABR、MRS形)
ブレーキ抵抗器の過熱・焼損を防ぐため、
サーマルリレーを設置してください。
(0.1K、0.2Kはブレーキ抵抗器の接続は
できません。)
*4
接地
P/+
*3 0.1K、0.2Kはブレーキトランジスタを内
蔵していません。
N/*3
U
V
W
突入電流
抑制回路
PM
モータ
接地
主回路
接地
制御回路
標準制御端子台
制御入力信号(電圧入力は不可)
入力端子割付(Pr.178∼
Pr.184)によって端子機
能変更可能です。
始動信号
B
STR
始動信号
(逆転)
テーブル選択信号RH
ポイント
テーブル
選択
テーブル選択信号RM
テーブル選択信号RL
A
オープンコレクタ出力
RM
RUN
RL
DC24V電源
(外部電源トランジスタコモン)
アナログ入力端子は使用しません。
SD
SINK
RES
FU
SOURCE
接点入力コモン
Pr.192 ABC端子機能選択
リレー出力 によって端子機能変更可
(異常出力) 能です。
RH
MRS
サーボオン信号SON
*2 端子PC-SD間を (Pr.183=“86”)
DC24V電源とし
リセット
て使用する場
合は、両端子
間が短絡しな
いよう注意し
てください。
リレー出力
C
STF
SE
24V
PC *2
出力端子割付
位置決め完了信号Y36 (Pr.190、Pr.191)
によって端子機能
(Pr.190=“36”)
変更可能です。
移動完了信号Y38
(Pr.191=“38”)
オープンコレクタ出力コモン
シンク・ソース共通
目盛校正
抵抗器
+
10(+5V)
FM
*5
4 DC4∼20mA
DC0∼5V
DC0∼10V
I
PU
コネクタ
*6
V
電圧/電流入力切換
スイッチ
可動コイル形
1mAフルスケール
SD
2 DC0∼5V
(DC0∼10V)
5(アナログ
コモン)
− 表示計(速度計など)
USB
コネクタ
*5 操作パネルで目盛校正
するときは不要です。
*6 パラメータユニット(FR-PU07)や盤面操作
パネル(FR-PA07)からの運転や、パラメ
ータ設定ができます。(オプションの接
続ケーブル(FR-CB2□□)を使用してく
ださい。)
また、パソコンなどからRS-485通信運転
を行うことができます。
*7 USB(Ver1.1)ケーブルでパソコンとドラ
イブユニットが接続できます。
*7
内蔵オプション
接続用コネクタ
オプションコネクタ
注 記
ノイズによる誤動作を防止するため、信号線は動力線と 10cm 以上離してください。また、主回路配線の入力側と出力側は分
離してください。
配線時にドライブユニット内部に電線の切りくずを残さないでください。
電線の切りくずは、異常、故障、誤動作の原因になります。ドライブユニットはいつもきれいにしておいてください。制御
盤などに取付け穴をあけるときは、切粉などがドライブユニットに入らないよう注意してください。
位置制御時にはSON信号を割り付けてください。(115 ページ 参照)
78
位置制御について
4.5.2
位置制御のゲイン調整(Pr.422、Pr.423、Pr.427、Pr.427、Pr.463、Pr.698、Pr.877)
パラメータ
名 称
初期値
設定範囲
422
423
位置制御ゲイン
位置フィードフォワードゲイン
20sec-1
0∼150sec-1
0%
0∼100%
427
誤差過大レベル
40Kパルス
0∼400Kパルス
446
モデル位置制御ゲイン
0sec-1
0∼150sec-1
番号
0
463
位置制御回転方向選択
0
1
698
877
速度制御Dゲイン
0%
フィードフォワード制御・モデ
ル適応制御選択
0∼100%
0
内 容
位置制御ゲインを設定します。
溜りパルスによる遅れをキャンセルする機能
溜りパルス数【電子ギア後】が設定値を超え
ると位置誤差過大(E.OD)となります。
モデル位置制御器用ゲインを設定します。
CCW方向に回転時、位置パルスが増加
CW方向に回転時、位置パルスが減少
CCW方向に回転時、位置パルスが減少
CW方向に回転時、位置パルスが増加
速度制御の微分ゲインを設定します。
位置制御の位置決め完了中のみ動作します。
0
通常の位置制御を行います。
1
フィードフォワード制御を行います。
2
モデル適応制御を行います。
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
(1)
位置制御ゲイン(Pr.422)
モータ・機械の異常振動・騒音・過電流が発生するなどの現象が生じた場合に調整してください。
設定値を大きくすると、位置指令に対する追従性が上がり、停止時のサーボ剛性も上がりますが、反面オーバーシュー
トや振動が発生しやすくなります。
実際の速度応答を100rad/s(sec-1)∼200rad/s(sec-1)とし、その応答の1/10倍∼1/3倍となるようにPr.422 を設定し
ます。目安として、通常5∼50rad/s(sec-1)程度の範囲で設定してください。
例)実際の速度応答を200rad/s とし、Pr.422 を速度応答の1/10倍の設定とする場合
Pr.422 =200rad/s(sec-1)×1/10=20rad/s(sec-1)
Pr.422 の調整方法
現象・条件
設定値を上げる。
応答が遅い
設定値を3rad/s(sec-1)ごと上げていき、オーバーシュートあるいは停止時の振動など不安定
現象が発生する直前の設定値×0.8∼0.9程度の値を設定します。
オーバーシュートあるいは停止時
の振動など不安定現象が発生する
(2)
設定値を下げる。
設定値を3rad/s(sec-1)ごと下げていき、オーバーシュートあるいは停止時の振動など不安定
現象が発生しなくなる直前の設定値×0.8∼0.9程度の値を設定します。
位置フィードフォワードゲイン(Pr.423、Pr.877 =“1”)
溜りパルス(速度/位置制御ゲイン)による遅れをキャンセルする機能です。
位置応答や速度応答(速度指令の追従性)が遅い場合、Pr.423 を調整します。
Pr.423 は小さい値から設定し、所望の位置応答や速度応答が得られるまで徐々に上げていきます。オーバーシュートや
振動の発生しない範囲で設定してください。90%を目安として設定してください。
停止時のサーボ剛性については効果がありません。
(3)
モデル適応制御(Pr.446 、Pr.877 =“2”)
モータのモデル速度を演算しモデル側の位置制御器にフィードバックをかけます。またこのモデル位置を実際の位置制
御器の指令とします。
モデル位置制御器のゲインは、Pr.446 を用い、実際の位置制御ゲインはPr.422 を用います。
Pr.880 のイナーシャ比は、モデル側の速度制御器によるトルク電流指令値の計算時に使用します。
実際の速度制御器出力に、モデル側モータ速度の演算と速度制御器のトルク電流指令を加え、iq 電流制御の入力としま
す。
モデル側の速度制御はPr.828 を用い(P制御)、実際の速度制御器は第1ゲインPr.820 を用います。
79
4
パ
ラ
メ
|
タ
位置制御について
(4)
速度制御Dゲイン(Pr.698)
位置制御時の位置決め完了中に、目標位置に安定して停止できない場合(目標位置を中心に振動をする場合)に、Pr.698
速度制御Dゲイン を調整することで、不安定現象(振動現象)を抑制します。
Pr.698 =100%で、折れ点角周波数ωf=10rad/sとなり、それ以下の周波数成分に対する応答を下げることができます。
ただし、Pr.698 の設定値が大きくなるにつれ、位置偏差は大きくなります。
(5)
誤差過大レベル(Pr.427)
溜りパルス数【電子ギア後】(=位置指令【電子ギア後】−現在位置【電子ギア後】)が、Pr.427 誤差過大レベル の設
定値を超えるとエラー (E.OD)を表示し停止します。Pr.422 位置制御ゲイン の設定値を小さくした時には、溜りパルス
も大きくなるため、Pr.427 の設定値を大きくしてください。
過負荷時の位置誤差過大を早めに検出したい時は、設定を小さくしてください。
(6)
モータ回転方向と位置パルス積算(Pr.463)
Pr.463 位置制御回転方向選択 =“0”の場合、モータ軸から見て反時計(CCW)方向にモータが回転した場合に位置パ
ルス(現在位置)は増加していき、時計(CW)方向にモータが回転した場合に位置パルス(現在位置)は減少していきます。
Pr.463 位置制御回転方向選択 =“1”の場合、モータ軸から見て反時計(CCW)方向にモータが回転した場合に位置パ
ルス(現在位置)は減少していき、時計(CW)方向にモータが回転した場合に位置パルス(現在位置)は増加していきます。
CCW:位置パルス
(現在位置)増加
CCW:位置パルス
(現在位置)減少
CW:位置パルス(現在位置)減少
Pr.463=“0” の場合
CW:位置パルス(現在位置)増加
Pr.463=“1” の場合
注 記
Pr.463 は、運転停止中(ドライブユニットの始動指令がOFFで出力遮断している状態)に書込み可能で、設定は即時反映され
ます。
運転中は書込みできません。
(7)
トラブルシューティング(位置制御編)
現象
モータが回転しない。
80
原因
対策
(1) モータ配線の相順が間違っている。
(1)
(2) 制御モード選択 Pr.800 の設定が適切で (2)
ない。
(3) サーボオン(SON)または予備励磁(LX)、 (3)
ポイントテーブル選択信号(RH、RM、
RL)、起動信号(STF、STR)が入力され
ていない。
(4) 急停止(X87)(常時閉の場合)または正転 (4)
ストロークエンド(LSP)(常時閉の場
合)、逆転ストロークエンド(LSN)(常時
閉の場合)、PU停止が入力されている。
(5) 目標位置Pr.465∼Pr.485 の設定が正し (5)
くない。
(6) 溜まりパルス数【電子ギア後】が、
(6)
Pr.427 誤差過大レベル の設定値を超え
た。
配線を確認する。
Pr.800 の設定を確認する。
信号が正常に入力されているか確認す
る。
信号が正常に入力されているか確認す
る。
目標位置Pr.465∼Pr.485 の確認。
Pr.427 誤差過大レベル の設定を確認す
る。
位置ずれが生じる。
(1) ポイントテーブル選択信号(RH、RM、 (1) 配線を確認する。
RL)が入力されていない。
(2) 電子ギアPr.420、Pr.421 の設定が正し (2) 電子ギアPr.420、Pr.421 の設定の確
くない。
認。
モータあるいは機械がハンチングする。
(1) 位置ループゲインが高い。
(2) 速度ループゲインが高い。
機械の動きが安定しない。
(1) 加減速時間設定が悪影響を与えている。 (1) 加減速時間(Pr.578∼Pr.591)を下げる。
(1) Pr.422 を下げる。
(2) Pr.820 を下げ、Pr.821 を上げる。
位置制御について
4.5.3
ポイントテーブル簡易位置決め機能(Pr.4∼6、Pr.24∼Pr.27、Pr.465∼Pr.478、Pr.525
∼Pr.531、Pr.537、Pr.578∼Pr.591)
あらかじめパラメータにパルス数(位置)や加減速時間などの位置決めデータを設定して、ポイントテーブルを作成
します(ポイントテーブル方式)。そのポイントテーブルを選択することにより位置決め運転します。
パラメータ
番号
4
5
6
名 称
3速設定(高速)
3速設定(中速)
3速設定(低速)
初期値
設定範囲
3000r/min
0∼4800r/min
1500r/min
0∼4800r/min
第2位置決め時の最高速度
300r/min
0∼4800r/min
第3位置決め時の最高速度
24
多段速設定(4速)
9999
25
多段速設定(5速)
9999
26
多段速設定(6速)
9999
27
多段速設定(7速)
9999
465
466
467
468
469
470
471
472
473
474
475
476
477
478
508
509
525
526
第1目標位置下位4桁
第1目標位置上位4桁
第2目標位置下位4桁
第2目標位置上位4桁
第3目標位置下位4桁
第3目標位置上位4桁
第4目標位置下位4桁
第4目標位置上位4桁
第5目標位置下位4桁
第5目標位置上位4桁
第6目標位置下位4桁
第6目標位置上位4桁
第7目標位置下位4桁
第7目標位置上位4桁
原点シフト量下位4桁
原点シフト量上位4桁
第1位置決め補助機能
第2位置決め補助機能
0∼4800r/min、
9999
0∼4800r/min、
9999
0∼4800r/min、
9999
0∼4800r/min、
9999
内 容
第1位置決め時の最高速度
第4位置決め時の最高速度
Pr.24 =“9999”の時、Pr.6 の設定値
第5位置決め時の最高速度
Pr.25 =“9999”の時、Pr.6 の設定値
第6位置決め時の最高速度
Pr.26 =“9999”の時、Pr.5 の設定値
第7位置決め時の最高速度
Pr.27 =“9999”の時、Pr.6 の設定値
0
0∼9999
電子ギア前の目標位置データを設定します。
上位+下位データで構成されます。
0
0∼9999
原点位置をずらす場合、オフセットを設定
目標位置データの機能を設定します。
符号
527
第3位置決め補助機能
528
第4位置決め補助機能
529
第5位置決め補助機能
530
第6位置決め補助機能
531
第7位置決め補助機能
10
537
ロール送りモード選択
0
10
0
1
10
11
100
101
110
111
0
10
100
110
0
1
指令方式
連続運転
正
絶対位置指令
単独
正
絶対位置指令
連続
正
増分値指令
単独
正
増分値指令
連続
負
絶対位置指令
単独
絶対位置指令
連続
負
負
増分値指令
単独
負
増分値指令
連続
正
絶対位置指令
単独
正
増分値指令
単独
絶対位置指令
単独
負
負
増分値指令
単独
絶対位置でのポイントテーブル位置制御
ロール送りモードのポイントテーブル位置制御
81
4
パ
ラ
メ
|
タ
位置制御について
パラメータ
名 称
番号
578
579
580
581
582
583
584
585
586
587
588
589
590
591
初期値
第1位置決め加速時間
第1位置決め減速時間
第2位置決め加速時間
第2位置決め減速時間
第3位置決め加速時間
第3位置決め減速時間
第4位置決め加速時間
第4位置決め減速時間
第5位置決め加速時間
第5位置決め減速時間
第6位置決め加速時間
第6位置決め減速時間
第7位置決め加速時間
第7位置決め減速時間
5s
設定範囲
内 容
0.01∼360s
加減速時間の基準は、Pr.20 加減速基準速度
で設定します。
加減速時間は、停止∼Pr.20 間の速度変化時
間を設定します。
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
(1)
ポイントテーブルの設定(Pr.4∼6、Pr.24∼Pr.27、Pr.465∼Pr.478、Pr.525∼Pr.531、Pr.537、Pr.578∼
Pr.591)
目標位置、速度、加減速時間をポイントテーブルに割り付け、RH、RM、RL信号でテーブルを選択します。
位置データ
ポイント
【電子ギア前】
テーブル
上位
最高速度 加速時間 減速時間
下位
0
テーブル選択信号
補助機能
RH
RM
原点復帰モード
Pr.466
Pr.468
Pr.470
Pr.472
Pr.474
Pr.476
Pr.478
1
2
3
4
5
6
7
Pr.465
Pr.467
Pr.469
Pr.471
Pr.473
Pr.475
Pr.477
Pr.4
Pr.5
Pr.6
Pr.24
Pr.25
Pr.26
Pr.27
Pr.578
Pr.580
Pr.582
Pr.584
Pr.586
Pr.588
Pr.590
Pr.579
Pr.581
Pr.583
Pr.585
Pr.587
Pr.589
Pr.591
Pr.525
Pr.526
Pr.527
Pr.528
Pr.529
Pr.530
Pr.531
位置指令移動完了状態でのみ、位置指令は受け付けます。位置指令動作中は新たな位置データを受け付けません。
速度指令がPr.1 上限設定 以上の速度にはなりません。また、Pr.2 下限設定 は無効となります。
RL
位置制御時の加減速パターンはすべて直線加減速とし、Pr.29 加減速パターン選択 の設定は無効となります。
RT信号入力時も本設定値で動作します(第2加減速時間は無効です)。
また、12r/min/1sより遅い加減速時間設定の場合は、12r/min/1sの傾きで加減速します。
Pr.525∼Pr.531 補助機能 にて目標位置データの機能を設定します。
項目
符号
指令方式
連続運転
内容
正
目標位置データを正の値とします。
負
目標位置データを負の値とします。
絶対位置指令
原点を基準とした絶対位置で指令を与えます。原点復帰動作が完了していない場合、受け付けません
(動作しません)。
増分値指令
現在位置からの増分値で指令を与えます。
単独
選択した1つのポイントテーブルを実行します。
連続
位置決め完了後、次のポイントテーブルを連続して実行します。
Pr.531 第7位置決め補助機能 には連続の設定ができません。
位置制御を行う場合は、SON信号(もしくはLX信号)をONしてください。SON信号とLX信号については、114 ページ
を参照ください。
SON信号入力に使用する端子は、Pr.178∼Pr.184(入力端子機能選択) に“86”を設定して機能を割り付けてください。
LX信号入力に使用する端子は、Pr.178∼Pr.184(入力端子機能選択) に“23”を設定して機能を割り付けてください。
位置制御を行う場合は、必ず原点復帰を行ってください。ただし、ロール送りモード(Pr.537 =“1”)選択時は原点復
帰は不要です。原点復帰については、89 ページ を参照ください。
82
位置制御について
始動信号(STF信号またはSTR信号)の立ち上がりで、テーブル選択(RH、RM、RL)の情報を確定し、位置移動を開始し
ます。
増分値指令の場合は、始動指令にSTR信号を使用した場合、位置データの符号の正負が逆になります。絶対位置指令の
場合はSTR信号を使用しても逆になりません。
補助機能設定
指令方式
(Pr.525∼Pr.531)
符号
増分値指令
絶対位置指令
正
負
正
正転指令(STF信号)
正
負
正
負
負
逆転指令(STR信号)
負
正
正
負
増分値指令により目標位置が指令データ設定範囲(-99999999∼99999999)外となった場合は、目標位置は99999999
(正の場合)または-99999999(負の場合)となり、位置制御は継続します。
注 記
ポイントテーブルの最高速度(Pr.4∼Pr.6、Pr.24∼Pr.27) は0r/minを設定しないでください。0r/minを設定すると、位置指
令が作成されず停止状態のままとなります。この状態となった場合は、いったんSON信号(もしくはLX信号)をOFFとして、再
度、原点復帰を行ってください。
外部信号の優先順位は、「JOG信号(JOG)(JOG信号2(JOG2))>テーブル選択信号(RH、RM、RL)」となります。
Pr.13 始動速度 の設定は無効となります。
(2)
動作例
下記のパラメータ設定を行った場合の動作例を示します。
《絶対位置でのポイントテーブル位置制御(Pr.537 =“0”)》
ポイント
テーブル
1
2
3
位置データ
【電子ギア前】
Pr.465 =“1000”、
Pr.466 =“0”
Pr.467 =“1000”、
Pr.468 =“0”
Pr.469 =“500”、
Pr.470 =“0”
最高速度
加速時間
Pr.4 =
“2000r/min”
Pr.5 =
“1500r/min”
Pr.6 =
“2000r/min”
減速時間
テーブル選択信号
補助機能
RH
RM
RL
Pr.578 =“1s” Pr.579 =“1s” Pr.525 =“1”
Pr.580 =“2s” Pr.581 =“2s” Pr.526=“10”
Pr.582 =“1s” Pr.583 =“1s” Pr.527=“100”
サーボオン(SON)
または予備励磁(LX)
ON
原点復帰完了
原点復帰動作
原点復帰中
ON
テーブル選択(RH)
ON
テーブル選択(RM)
∗2
テーブル選択(RL)
ON
∗2
ON
正転始動(STF) ∗1
∗2
ON
逆転始動(STR) ∗1
0
目標位置【電子ギア前】
1000
2000
-500
-1500
4
Pr.4=2000r/min
Pr.5=1500r/min Pr.582の傾き
Pr.583の傾き
速度指令
0
Pr.580の傾き
Pr.578の傾き
Pr.579の傾き
Pr.581の傾き Pr.6=2000r/min
移動距離=1000
パ
ラ
メ
|
タ
時間
移動距離=1000 移動距離=-2500 移動距離=-1000
現在位置【電子ギア前】
2000
1000
0
-500
-1500
始動指令のON時間は、20ms以上必要です。
テーブル選択信号ON後5ms以上経過してから、始動指令をONしてください。
83
位置制御について
(3)
ロール送りモード(Pr.537 =“1”)
始動時に現在位置と位置指令を0として、位置制御を実行します。
始動時に現在位置と指令位置を 0 とするため、位置指令がオーバーフローする事無く、くり返し増分値送りを行う事が
可能となります。
本設定時は、原点復帰動作は不要です。
下記のパラメータ設定を行った場合の動作例を示します。
《ロール送りモードでのポイントテーブル位置制御(Pr.537 =“1”)》
ポイント
テーブル
1
2
3
位置データ
【電子ギア前】
Pr.465 =“1000”、
Pr.466 =“0”
Pr.467 =“1000”、
Pr.468 =“0”
Pr.469 =“500”、
Pr.470 =“0”
最高速度
Pr.4 =“2000r/
min”
Pr.5 =“1500r/
min”
Pr.6 =“2000r/
min”
加速時間
減速時間
Pr.578 =“1s”
Pr.579 =“1s”
Pr.580 =“2s”
Pr.582 =“1s”
サーボオン(SON)
または予備励磁(LX)
補助機能
RH
RM
RL
Pr.525 =“1”
Pr.581 =“2s”
Pr.526=“10”
Pr.583 =“1s”
Pr.527=“100”
ON
ON
テーブル選択(RH)
ON
テーブル選択(RM)
∗2
テーブル選択(RL)
∗2
ON
正転始動(STF) ∗1
ON
∗2
ON
ON
逆転始動(STR) ∗1
1000
目標位置【電子ギア前】
2000
-500
Pr.4=2000r/min
Pr.5=1500r/min
速度指令
-1000
Pr.582の傾き
Pr.583の傾き
0
時間
Pr.580の傾き
Pr.578の傾き
Pr.579の傾き Pr.581の傾き Pr.6=2000r/min
移動距離=1000 移動距離=1000
移動距離=-500 移動距離=-1000
現在位置【電子ギア前】
2000
0クリア
1000
0クリア
0
時間
-500
0クリア
始動指令のON時間は、20ms以上必要です。
テーブル選択信号ON後5ms以上経過してから、始動指令をONしてください。
84
テーブル選択信号
-1000
位置制御について
4.5.4
位置制御の停止動作(Pr.464、Pr.535)
位置制御中に入力端子により停止できます。
パラメータ
番号
464
535
名 称
初期値
位置制御急停止減速時間
0.01s
位置制御端子入力選択
設定範囲
0.01∼360s
0
0
1
10
11
100
101
110
111
内 容
急停止信号入力、もしくは正転/逆転ストロー
クエンド信号入力で停止する時の減速時間を設
定します。
減速時間の基準は、Pr.20 加減速基準速度 で設
定します。減速時間は、Pr.20 ∼停止間の速度
変化時間を設定します。
X87、LSP、LSNの入力論理を選択することが
できます。
常時開:各信号−SD間短絡時、停止します。
常時閉:各信号−SD間開放時、停止します。
LSN
LSP
X87
常時開
常時開
常時閉
常時開
常時開
常時閉
常時閉
常時開
常時開
常時閉
常時閉
常時開
常時閉
常時閉
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
(1)
急停止動作(X87信号)
入力端子にX87信号(急停止信号)を割り付けた場合、X87信号OFF(常時閉入力の場合)で、Pr.464 位置制御急停止減速
時間 に設定された減速時間の傾きで停止します。ただし、現在の位置制御指令で設定されている減速時間よりPr.464
位置制御急停止減速時間 が長い場合、現在の位置制御指令で設定されている減速時間の傾きで停止します。停止後、
X87信号ON(常時閉入力の場合)にすることで、再び位置制御を実行することができます。X87信号入力に使用する端子
は、Pr.178∼Pr.184(入力端子機能選択) に“87”を設定して機能を割り付けてください。
Pr.535 位置制御端子入力選択 の設定値の1の桁が0の場合は常時開入力となり、X87信号がONで停止となります。1の
場合は常時閉入力となり、X87信号がOFFで停止となります。
停止(サーボロック)
再始動可
再始動不可
X87信号(常時閉入力)
ON
ON
Pr.464の傾き
速度指令
0
時間
位置指令
位置
【電子ギア前】
0
4
時間
パ
ラ
メ
|
タ
85
位置制御について
(2)
ストロークエンドの設定(LSP信号、LSN信号、LP信号)
入力端子にLSP信号(正転ストロークエンド)、LSN信号(逆転ストロークエンド)を割り付けた場合、LSP信号またはLSN
信号OFF(常時閉入力の場合)で、Pr.464 位置制御急停止減速時間 に設定された減速時間の傾きで停止します。ただし、
現在の位置制御指令で設定されている減速時間よりPr.464 位置制御急停止減速時間 が長い場合、現在の位置制御指令
で設定されている減速時間の傾きで停止します。
停止後、LSP信号(LSN信号)がOFFの間はモータ回転方向がCCW(CW)の方向に動くことはできません。
LSP信号入力に使用する端子は、Pr.178∼Pr.184(入力端子機能選択) に“88”を設定して機能を割り付けてください。
LSN信号入力に使用する端子は、Pr.178∼Pr.184(入力端子機能選択) に“89”を設定して機能を割り付けてください。
LSP信号またはLSN信号がOFF(常時閉入力の場合)のとき、位置制御JOG運転によりCCW(CW)の方向に動くことがで
きます。
LSP信号またはLSN信号がOFF(常時閉入力の場合)のとき、ストロークリミット警報信号(LP信号)がONし、操作パネ
ル表示は“LP”が点滅します。ストロークリミット警報信号(LP信号)は、Pr.190∼Pr.192(出力端子機能選択) に
“24(正論理)”または、
“124(負論理)”を設定して機能を割り付けてください。
Pr.535 位置制御端子入力選択 の設定値の10(100)の桁が0の場合は常時開入力となり、LSP信号(LSN信号)がONで停
止となります。1 の場合は常時閉入力となり、LSP信号(LSN信号)信号がOFFで停止となります。
停止(サーボロック)
CCW方向移動不可
LSP信号(常時閉入力)
ON
ON
LSN信号(常時閉入力)
RH信号
RM信号
ON
ON
∗1
ON
STF信号
ON
ON
Pr.464の傾き
CCW方向
速度指令
∗1
0
時間
CW方向
位置指令
位置
【電子ギア前】
時間
LP 信号
テーブル選択信号ON後5ms以上経過してから、始動指令をONしてください。
ストロークエンド入力(常時閉入力の場合)
LSP(正転ストロークエンド) LSN(逆転ストロークエンド)
86
ON
運転可否
CCW方向
CW方向
動作可
ON
ON
動作可
OFF
ON
運転不可
動作可
ON
OFF
動作可
運転不可
OFF
OFF
運転不可
運転不可
位置制御について
4.5.5
押当て制御機能(Pr.512∼Pr.515 、X29信号)
押当て制御とは、より正確な位置決めを行うために、モータが保持トルクを出して機械ストッパーなどに押し当てる
動作をいいます。この機能により、安定して位置決め停止を行うことができます。
パラメータ
番号
名 称
初期値
設定範囲
内 容
トルク制限値をPr.513 の設定値とし、E.OLTを
動作させないように切り換える条件を設定しま
0
1
512
押当て制御機能選択
0
10
11
12
513
押当て制御トルクリミット
514
515
40%
0∼200%
押当て制御切換位置下位4桁
0
0∼9999
押当て制御切換位置上位4桁
0
0∼9999
す。
動作せず
X29信号ON時(速度制御、位置制御)
位置制御時に、
現在位置【電子ギア前】≧ Pr.515 + Pr.514
または
現在位置【電子ギア前】≦ - (Pr.515 + Pr.514 )
位置制御時に、
現在位置【電子ギア前】≧ Pr.515 + Pr.514
位置制御時に、
現在位置【電子ギア前】≦ - (Pr.515 + Pr.514 )
押当て制御時のトルク制限値を設定します。
位置制御時に、現在位置【電子ギア前】が、
Pr.512 で設定される条件になった場合、
Pr.513 の設定値でのトルクリミット動作となり
ます。
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
(1)
X29信号による押当て制御(Pr.512 =“1”
、Pr.513 、X29信号)
入力端子にX29信号(押当て制御切換)を割り付けた場合、X29信号ONでトルクリミット値をPr.513
の設定値とし、
E.OLTを動作させないようにします。
X29信号入力に使用する端子は、Pr.178∼Pr.184(入力端子機能選択) に“29”を設定して機能を割り付けてください。
X29信号による押当て制御は、速度制御時、位置制御時ともに動作します。
Pr.513 押当て制御トルクリミット が動作してモータが停止した場合は、E.OLTは発生しませんが、電子サーマルは動
作しますので、高負荷で長時間押当て制御を行うと、モータ過負荷遮断異常(E.THM)もしくはインバータ過負荷遮断異
常(E.THT)となる場合があります。
Pr.513 の設定値は、モータ過熱防止のため80%以下としてください。
ON
SON信号
RH信号
ON
ON
ON
RL信号
ON
X29信号
ON
STF信号
ON
STR信号
4
トルクリミット
回転速度
Pr.22
Pr.513
Pr.22
押当て
制御
0
パ
ラ
メ
|
タ
時間
速度制御の例
87
位置制御について
(2)
位置制御時トルクリミット自動切換による押当て制御(Pr.512∼Pr.515)
位置制御時に現在位置【電子ギア前】が、Pr.515 + Pr.514 押当て制御切換位置を超えた場合、トルクリミット値を
Pr.513 の設定値とし、E.OLTを動作させないようにします。
Pr.515 + Pr.514 押当て制御切換位置を正負両方の位置で動作させるか、正の位置で動作させるか、負の位置で動作さ
せるかはPr.512 押当て制御機能選択 で設定することができます。
Pr.513 押当て制御トルクリミット が動作してモータが停止した場合は、E.OLTは発生しませんが、電子サーマルは動
作しますので、高負荷で長時間押当て制御を行うと、モータ過負荷遮断異常(E.THM)もしくはインバータ過負荷遮断異
常(E.THT)となる場合があります。
トルクリミット
Pr.22
位置指令
位置
【電子ギア前】
Pr.513
Pr.22
押し当て中
Pr.515+Pr.514
現在位置
時間
備 考
Pr.156 トルク制限動作選択 が、トルク制限動作しない設定の場合、本機能は無効となります。
Pr.156 =“16∼29”設定時は、押当て時にOL信号出力するとE.OLTにて出力遮断となります。
ロール送りモード以外の位置制御時は原点復帰をしないと、サーボオン(予備励磁)した位置が原点となります。
ロール送りモードの位置制御時は始動位置が原点となります。
押当て制御トルクリミットレベルが大きく、長時間の場合、モータ温度変化による抵抗誤差により、位置ズレが発生する場合
があります。
位置制御で押当て制御中の溜まりパルスは保持されるので、押当て解除後は溜まりパルス分の動作遅れが発生します。
88
位置制御について
4.5.6
位置制御原点復帰(Pr.110、Pr.111、Pr.453、Pr.455、Pr.508、Pr.509、Pr.532∼
Pr.534)
位置制御の原点位置を決定します。原点位置を決めるまでは絶対位置での位置制御運転はできません。
パラメータ
名 称
番号
110
111
453
455
508
509
原点復帰シフト移動加速時間
原点復帰シフト移動減速時間
原点復帰高速速度
原点復帰シフト移動速度
原点シフト量下位4桁
原点シフト量上位4桁
532
原点復帰選択
533
534
原点復帰押当てトルク
原点復帰押当て時間
初期値
設定範囲
5s
0.01∼360s
内 容
0r/min∼Pr.20 までの加速時間を設定
0r/min∼Pr.20 までの減速時間を設定
5s
0.01∼360s
300r/min
0∼4800r/min
原点復帰高速時の最高速度
1500r/min
0∼4800r/min
原点復帰シフト移動時の最高速度
0
0∼9999
0
0∼9999
4
2
3
4
6
40%
0∼200%
0.5s
0∼10s
原点位置をずらす場合、オフセットを設定
データセット式
押当て方式
原点無視(サーボオン位置原点)
カウント式前端基準
押当て原点復帰のトルクリミット値を設定
押当て原点復帰の押当て時間を設定
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
(1)
原点復帰パターン選択(Pr.532)
原点復帰のパターンをPr.532 にて選択します。制御モードにより下表の動作となります。
原点復帰を実行する場合は、ポイントテーブルおよびJOG運転を選択せず(RH、RM、RL、JOGをOFF)に始動信号
(STF信号またはSTR信号)をONとしてください。
原点復帰は、始動信号(STF信号またはSTR信号)が入力(立ち上りエッジ)された時点で実行します。
PMセンサレスベクトル制御では、エンコーダ等のセンサによる位置検出が無いため、モータへ通電する事で位置検出
を行っています。そのため、SON信号(もしくはLX信号)がOFFとなると位置は不定となりますので、SON信号(もし
くはLX信号)をON後、再度原点復帰動作を行ってください。同様に電源OFF時も位置は不定となりますので、電源ON
後は必ず原点復帰動作を行ってください。
速度制御時は原点復帰はできません。原点復帰を行う場合は、必ず位置制御モードとしてください。
Pr.532 設定値
方式
内容
2
データセット式
任意の位置を原点にする。
3
押当て方式
機械端に押し当てて原点復帰を行う。
原点復帰方向選択可・原点シフト量設定可。
4
原点無視(サーボオン位置原点)
サーボオンしたときの位置を原点にする。
カウント式前端基準
近点ドグ前端を基準にし、ドグ前端に原点復帰を行う。
原点復帰方向選択可・原点シフト量設定可。
6
注 記
電源をOFF、SON信号(もしくはLX信号)をOFFすると位置は不定となりますので、電源をON後、SON信号(もしくはLX
4
信号)ON後は必ず原点復帰動作を行ってください。
(2)
原点復帰完了信号(ZP信号)、原点復帰異常信号(ZA信号)
原点復帰が完了すると原点復帰完了信号(ZP)がONします。原点復帰完了後に再度原点復帰を行った場合、原点復帰動
作中に原点復帰完了信号(ZP)が一旦OFFし、原点復帰完了にて原点復帰完了信号(ZP)がONします。
“163(負論理)”を設定して
原点復帰完了信号(ZP)は、Pr.190∼Pr.192(出力端子機能選択) に“63(正論理)”または、
機能を割り付けてください。
原点復帰動作にて異常が発生すると、原点復帰異常信号(ZA)がONし、操作パネル表示は“HP1”または“HP2”が点
滅します。再度原点復帰を実施し正常に原点復帰が完了した場合、原点復帰異常信号(ZA)はOFFします(SON信号(LX
信号)OFFでも原点復帰異常信号(ZA)はOFFします。)。原点復帰異常信号(ZA)は、Pr.190∼Pr.192(出力端子機能選
択) に“56(正論理)”または、“156(負論理)”を設定して機能を割り付けてください。
警報表示
警報名称
内容
HP1
原点セットミス警報
原点復帰が正しく終了しなかった。
HP2
原点復帰未完警報
原点復帰未完了状態でポイントテーブルによる位置指令を入力した場合
(ロール送りモードを除く)
原点復帰動作が完了しないと(原点復帰完了信号(ZP)がONしないと)、位置制御はできません(位置制御JOG運転は可能です。)。
89
パ
ラ
メ
|
タ
位置制御について
(3)
データセット式(Pr.532 =“2”)
任意の位置に移動し、原点復帰を行った位置を原点とするモードです。原点復帰実行後に Y36 信号が ON となった時点
の位置指令の値を原点とします。移動は位置制御JOG運転が使用できます。
Pr.508 + Pr.509 原点シフト量は無効です。
原点復帰実行開始後、10s間位置決め完了信号(Y36)がONとならなかった場合、原点セットミス警報(HP1)を表示しま
す。
ON
SON信号(LX信号)
RH、RM、RL信号
ON
JOG信号
ON
STF信号
ON
CCW方向
速度指令 0
時間
CW方向
原点位置
原点復帰完了信号(ZP)
(4)
押当て方式(Pr.532 =“3”、Pr.533、Pr.534 )
機械端に接触、押し当てることで原点を決める方法です。
原点復帰方法は以下となります。
① ポイントテーブル、JOG運転を選択せずに、正転始動(STF信号)または逆転始動(STR信号)を入力すると、Pr.453
原点復帰高速速度 で運転します。
② 機械端に接触し、Pr.533 原点復帰押当てトルク 以上のトルクがかかると、OL信号を出力します。
③ 安定した押当て状態となるよう500ms待ちます。
④ その後、OL信号出力状態がPr.534 原点復帰押当て時間 連続で、その位置を機械端と決定します。
⑤ 機械端から逆方向に、Pr.455 原点復帰シフト移動速度 で Pr.508 + Pr.509 原点シフト量で設定された移動量分だ
け移動し、その位置を原点とします。
下記状態の時、原点セットミス警報(HP1)を表示します。
・Pr.453 原点復帰高速速度 で移動中、電源ONの位置から、99999999または、-99999999移動しても押当て状態とな
らなかった。
・Pr.534 原点復帰押当て時間 押当て状態が継続しなかった。
・原点シフト量移動後10s間位置決め完了信号(Y36)がONとならなかった。
SON信号(LX信号)
RH、RM、RL、JOG信号
STF信号
トルクリミット Pr.22
速度
ON
ON
Pr.513
Pr.22
Pr.453 原点復帰高速速度
Pr.110の傾き
Pr.111の傾き
0
時間
Pr.7の傾き
Pr.455 原点復帰帰シフト移動速度
機械端
Pr.508+Pr.509 原点シフト量【電子ギア前】
500ms
過負荷警報(OL)
原点復帰完了信号(ZP)
90
仮原点
原点位置
Pr.455
原点復帰帰押当て時間
ON
ON
位置制御について
(5)
原点無視(サーボオン位置原点)(Pr.532 =“4”)
サーボオン(もしくは予備励磁)をONした位置を原点とします。
Pr.508 + Pr.509 原点シフト量は無効です。
SON信号(LX信号)
ON
初期磁極位置検出
約100ms
原点位置
ON
原点復帰完了信号(ZP)
(6)
カウント式前端基準(Pr.532 =“6”)
近点ドグ(X76信号)前端部の検出位置により、原点を決める方法です。近点ドグ前端で減速を開始し、原点シフト量分
を移動した位置を原点にします。
X76信号入力に使用する端子は、Pr.178∼Pr.184(入力端子機能選択) に“76”を設定して機能を割り付けてください。
原点復帰方法は以下となります。
① ポイントテーブル、JOG運転を選択せずに、正転始動(STF信号)または逆転始動(STR信号)を入力すると、Pr.453
原点復帰高速速度 で運転します。
②近点ドグ前端を検出したらその位置を仮原点とし、減速停止します。
③仮原点から原点シフト量分移動し、その点を原点とします。
ON
SON信号(LX信号)
RH、RM、RL、JOG信号
STF信号
ON
ON
X76信号
Pr.453 原点復帰高速速度
速度
Pr.455 原点復帰帰シフト移動速度
0
Pr.7の傾き
Pr.110(Pr.111)の傾き
Pr.110の傾き
Pr.8の傾き
時間
近点ドグ
Pr.508+Pr.509 原点シフト量【電子ギア前】
仮原点
原点位置
原点復帰完了信号(ZP)
注 記
X76信号取込みタイミングのバラつきにより、原点位置がバラつくことがあります。
4
パ
ラ
メ
|
タ
91
位置制御について
4.5.7
電子ギアの設定(Pr.420、Pr.421)
機械側ギアとモータ側ギアの比率を設定します。
パラメータ
名 称
番号
指令パルス倍率分子(電子ギア
分子)
指令パルス倍率分母(電子ギア
分母)
420
421
初期値
設定範囲
1
1∼32767 1
1
1∼32767 1
内 容
電子ギアの設定をします。
Pr.420 が分子、Pr.421 が分母
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
ドライブユニット装備の操作パネル使用時は、設定値が最大9999までの設定となります。パラメータユニット使用時は、設定範囲の最大値まで設定す
ることができます。
位置分解能(1パルス当たりの移動量△ [mm])はモータ1回転当たりの移動量s[mm]とモータ1回転当たりのパルス数
(=5120)[pulse/rev]によって決まり、次式で表されます。
△
△s
△s
=
=
Pf
5120
△
:1パルス当たりの移動量
[mm]
△s :モータ1回転当たりの移動量
[mm]
Pf
:モータ1回転当たりのパルス数(=5120)[pulse/rev]
位置分解能(1パルス当たりの移動量△ [mm])は電子ギアの設定によって変えることができます。
△
=
△s
Pr.420
×
Pf
Pr.421
△
:1指令当たりの移動量
[mm]
△s :モータ1回転当たりの移動量
[mm]
Pf :モータ1 回転当たりのパルス数(=5120)[pulse/rev]
《設定例》△s=10mmの装置で、1パルス当たりの移動量を0.01mmにする場合
△ :0.01[mm]、△s:10[mm]、Pf:5120[pulse/rev]
Pr.420
10
→ Pr.420 =128、Pr.421 =25
0.01 =
×
5120
Pr.421
注 記
ギア比の範囲は1/900∼900となります。1/900以下の比率設定時は1/900、900以上の比率設定時は900で制限されます。
92
位置制御について
4.5.8
位置決め調整パラメータの設定(Pr.426、Pr.506、Pr.507、Pr.510、Pr.511、Pr.536、
Y36信号、PBSY信号、MEND信号、CPO信号、FP信号)
パラメータ
名 称
番号
初期値
設定範囲
内 容
100パルス
0∼32767パルス
溜りパルス数【電子ギア後】が設定値よ
426
位置決め完了幅
り少なくなると位置決め完了信号(Y36)
がONします。
506
位置検出ヒステリシス幅
位置検出信号(FP信号)の検出位置に対す
0∼32767
0
るヒステリシス幅を設定します。
粗一致信号(CPO信号)を出力する指令残
距離【電子ギア前】(=目標位置【電子ギ
507
粗一致出力範囲
0
0∼32767
510
511
位置検出下位4桁
位置検出上位4桁
0
0∼9999
位置検出判定値の下位4桁を設定。
0
0∼9999
位置検出判定値の上位4桁を設定。
0
正、負両方の位置で位置検出する。
536
位置検出選択
0
1
正の位置のみ位置検出を行う。
2
負の位置のみ位置検出を行う。
ア前】-現在位置【電子ギア前】)を設定
します。
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
ドライブユニット装備の操作パネル使用時は、設定値が最大9999までの設定となります。パラメータユニット使用時は、設定範囲の最大値まで設定す
ることができます。
(1)
位置決め完了幅、位置決め完了信号(Pr.426 、Y36信号)
溜りパルス数【電子ギア後】(=位置指令【電子ギア後】- 現在位置【電子ギア後】)が、Pr.426 位置決め完了幅 の設定
値より少なくなると位置決め完了信号(Y36信号)がONします。位置決め完了信号(Y36信号)は、Pr.190∼Pr.192(出力
端子機能選択) に“36(正論理)”または、“136(負論理)”を設定して機能を割り付けてください。
(2)
位置指令作成中信号(PBSY信号)
位置指令作成中に位置指令作成中信号(PBSY信号)がONします。位置指令作成中信号(PBSY信号)は、Pr.190∼Pr.192
(出力端子機能選択) に“61(正論理)”または、“161(負論理)”を設定して機能を割り付けてください。
目標位置
【電子ギア前】
0
1000
500
-1000
Pr.507 粗一致出力範囲
速度指令
0
時間
位置指令 位置
【電子ギア前】
現在位置
0
時間
位置決め完了信号(Y36)
ON
ON
ON
位置指令作成中信号(PBSY)
4
Pr.426 位置決め完了幅
溜りパルス
【電子ギア後】0
移動完了信号(MEND)
ON
粗一致信号(CPO)
ON
パ
ラ
メ
|
タ
ON
ON
ON
ON
ON
ON
ドライブユニット本体の出力端子は最大3点となります。
(3)
移動完了信号(MEND信号)
位置決め完了信号(Y36)がONかつ位置指令作成中信号(PBSY信号)がOFFのときに移動完了信号(MEND信号)がON
になります。移動完了信号(MEND信号)は、Pr.190∼Pr.192(出力端子機能選択) に“38(正論理)”または、“138(負論
理)”を設定して機能を割り付けてください。
93
位置制御について
(4)
粗一致信号(Pr.507 、CPO信号)
指令残距離【電子ギア前】(=目標位置【電子ギア前】- 現在位置【電子ギア前】)が、Pr.507 粗一致出力範囲 より小さ
くなったとき、粗一致信号(CPO信号)がONになります。粗一致信号(CPO信号)は、Pr.190∼Pr.192(出力端子機能選択)
に“55(正論理)”または、
“155(負論理)”を設定して機能を割り付けてください。
(5)
位置検出信号(Pr.506、Pr.510、Pr.511、Pr.536、FP信号)
現在位置【電子ギア前】が、Pr.510 + Pr.511 位置検出を超えると、位置検出信号(FP信号)がONします。位置検出信号
“160(負論理)”を設定して機能を割り付け
(FP信号)は、Pr.190∼Pr.192(出力端子機能選択) に“60(正論理)”または、
てください。
位置検出の判定を、正の位置で行うのか、負の位置で行うのかを、Pr.536 位置検出選択 で選択することができます。設
定値が“0”の場合は、正、負両方の位置で位置検出します。設定値が“1”の場合は正の位置のみで、設定値が“2”
の場合は負の位置のみで位置検出します。
位置
【電子ギア前】
位置検出レベル Pr.510+Pr.511 0
時間
位置検出レベル
Pr.510+Pr.511 ON
位置検出信号(FP):Pr.536=0 の場合
ON
ON
位置検出信号(FP):Pr.536=1 の場合
ON
位置検出信号(FP):Pr.536=2 の場合
現在位置が変動すると、位置検出信号(FP信号)がON/OFFを繰り返す(チャタリングする)場合があります。このとき、
検出位置にヒステリシスを設けることで、信号のチャタリングを防止することができます。ヒステリシスの幅は、Pr.506
位置検出ヒステリシス幅 にて設定します。
現在位置
位置
【電子ギア前】
Pr.506
Pr.506
位置検出レベル
Pr.510+Pr.511 時間
位置検出信号(FP)
94
ON
ON
ON
モータの出力トルク(電流)を調整する
4.6 モータの出力トルク(電流)を調整する
4.6.1
トルク制限動作(Pr.22、Pr.48、Pr.156、Pr.157)
過電流や過電圧などでドライブユニットがアラーム停止しないように出力電流を監視し、回転速度を自動的に変化さ
せます。
パラメータ
名 称
番号
初期値
22
トルク制限動作レベル
200%
48
第2トルク制限動作レベル
9999
156
トルク制限動作選択
0
157
OL信号出力タイマ
0s
設定範囲
0
0.1∼200%
0
0.1∼200%
9999
0∼31、100、101
0∼25s
内容
トルク制限動作無効
トルク制限動作を開始する電流値
トルク制限動作無効
2つ目のトルク制限動作レベル
Pr.22 と同一レベル
トルク制限動作の有無を選択
トルク制限が動作したときに出力する
OL信号の出力開始時間
9999
OL信号出力なし
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
Pr.77 パラメータ書込選択 を“0”(初期値)にしてあっても運転中、運転モードに関係なく設定値を変更することができます。
(1)
ブロック図
Pr.22
RT=OFF
Pr.22(Pr.48)=0
Pr.48
Pr.22(Pr.48)≠0
トルク制限動作レベル
トルク制限動作レベルの設定(Pr.22)
出力トルク(トルク分電流)がトルク制限動作電流レベルを超
えると、出力周波数を操作する事で出力トルクを制限しま
出力トルク
Pr.22
す。このときのトルク制限動作レベルは、モータ定格トルク
を基準とします。
回転速度
定速
トルク制限動作は、加速中は加速を中断(減速)し、定速中は
減速、減速中は減速を中断します。
速
減
加
速
(2)
トルク制限動作無効
RT=ON
時間
OL
トルク制限動作が働くと、OL信号を出力します。
トルク制限動作例
注 記
過負荷状態が長く続くと、ドライブユニットトリップ(電子サーマル(E.THM)など)することがあります。
トルク制限動作により、18r/minの値まで降下し、3s経過した場合、アラーム(E.OLT)を表示し、ドライブユニットは出力遮
4
断します。
パ
ラ
メ
|
タ
95
モータの出力トルク(電流)を調整する
(3)
トルク制限動作信号出力と出力タイミングの調整(OL信号、Pr.157 )
出力トルクがトルク制限動作レベルを越え、トルク制限が動作すると、トルク制限動作信号(OL信号)が100ms以上ON
します。出力トルクがトルク制限動作レベル以下となると、出力信号もOFFします。
OL信号を即出力するか、ある一定時間継続後に出力するかをPr.157 OL信号出力タイマ で設定できます。
回生回避動作
(過電圧失速)時も動作します。
OL信号はPr.190∼Pr.192 (出力端子機能選択) に“3(正論理)または、103(負論理)”を設定し、出力端子に機能を割り
付けてください。
Pr.157 設定値
0
内 容
過負荷状態(OL動作)
即出力する。
(初期値)
0.1∼25
OL出力信号
設定時間(s)後に出力する。
9999
出力しない。
Pr.157 設定時間(s)
注 記
Pr.190∼Pr.192 (出力端子機能選択) により端子割付の変更を行うと、他の機能に影響を与えることがあります。各端子の機
能を確認してから設定を行ってください。
(4)
2種類のトルク制限動作レベルを設定する(Pr.48)
RT信号をONすることにより、Pr.48 第2トルク制限動作レベル が有効になります。
RT信号入力に使用する端子は、Pr.178∼Pr.184(入力端子機能選択) に“3”を設定して機能を割り付けてください。
注 記
Pr.178∼Pr.184 (入力端子機能選択) により端子割付の変更を行うと、他の機能に影響を与えることがあります。各端子の機
能を確認してから設定を行ってください。
RT信号は、第2機能選択信号となり、他の第2機能も有効となります。(123ページ参照)
(5)
運転状態に応じてトルク制限動作を制限する(Pr.156)
下表を参照してトルク制限動作の有無、OL信号出力時の動作を選択してください。
トルク制限動作選択
トルク制限動作選択
OL信号出力
○:動作する
Pr.156 設定値
○:運転継続する
●:動作しない
速度制御
位置 ●:運転継続しない
加速 定速 減速 制御
OL信号出力
○:動作する
Pr.156 設定値
○:運転継続する
●:動作しない
速度制御
位置 ●:運転継続しない
加速 定速 減速 制御
0(初期値)、1
○
○
○
○
○
18、19
●
○
○
○
●
2、3
●
○
○
○
○
20、21
○
●
○
○
●
4、5
○
●
○
○
○
22、23
●
●
○
○
●
6、7
●
●
○
○
○
24、25
○
○
●
●
●
8、9
○
○
●
●
○
26、27
●
○
●
●
●
10、11
●
○
●
●
○
28、29
○
●
●
●
●
12、13
○
●
●
●
○
30、31
●
●
●
●
ー
14、15
●
●
●
●
ー
100、
力行
○
○
○
○
○
●
101
回生
●
●
●
●
ー
16、17
○
○
○
○
「OL信号出力時運転継続しない」を選択した場合は異常出力「
トルク制限が動作しないため、OL信号、E.OLTは出力しません。
設定値“100、101”は、力行、回生時それぞれの動作選択ができます。
」(トルク制限により停止)を表示して運転を停止します。
注 記
負荷が重い場合や加減速時間が短い場合は、トルク制限が動作し、設定の加減速時間通り加減速しない場合があります。
Pr.156 とトルク制限動作レベルを最適な値に設定してください。
96
モータの出力トルク(電流)を調整する
注意
トルク制限動作電流を小さくしすぎないようにしてください。
発生トルクが減少します。
試運転を必ず行ってください。
加速中のトルク制限動作によって加速時間が長くなることがあります。
定速中のトルク制限動作によって速度が急変することがあります。
減速中のトルク制限動作によって減速時間が長くなり減速距離が延びることがあります。
参照パラメータ
Pr.178∼Pr.184 (入力端子機能選択) Pr.190∼Pr.192 (出力端子機能選択) 120ページ参照
126ページ参照
4
パ
ラ
メ
|
タ
97
回転速度を制限する
4.7 回転速度を制限する
目的
設定が必要なパラメータ
回転速度の上限と下限を設定する
機械共振点を避けて運転する
4.7.1
上下限設定
速度ジャンプ
参照ページ
98
Pr.1、Pr.2
Pr.31∼Pr.36
99
上下限設定(Pr.1、Pr.2)
モータ速度を制限させることができます。
回転速度の上限および下限をクランプします。
パラメータ
名 称
番号
1
2
上限設定
下限設定
初期値
設定範囲
内 容
3000r/min
0∼4800r/min
回転速度の上限
0r/min
0∼4800r/min
回転速度の下限
3000r/min を超えた値を設定しても、回転速度は3000r/minで制限されます。
(1)
上限設定で
クランプされます。
上限速度を設定する
Pr.1 上限設定 に回転速度の上限を設定します。設定速度以上の速
度指令が入力されても回転速度は上限速度にクランプされます。
選択されたモータの使用可能最大速度でも速度指令はクランプさ
れます。そのため、モータの使用可能最大速度<上限速度の場合は、
回転速度(r/min)
Pr.1
上限速度まで速度指令は上昇しません。
速度設定値
Pr.2
0
(4mA)
下限設定で
クランプされます。
5、10V
(20mA)
備 考
速度指令で制限するため、モニタ表示は上限速度以上となることがあります。
(2)
下限速度を設定する
Pr.2 下限設定 に回転速度の下限を設定します。
設定速度がPr.2 以下であっても、回転速度はPr.2 でクランプされます(Pr.2 以下になりません)。
備 考
Pr.15 JOG速度設定 がPr.2 以下の場合は、Pr.15 の設定が優先されます。
トルク制限が動作し、回転速度が下降した場合、回転速度はPr.2 以下になることがあります。
速度指令で制限するため、モニタ表示は下限速度以下となることがあります。
注 記
位置制御時、下限設定は無効です。
注意
Pr.2 をPr.13 始動速度 以上の値に設定すると、指令速度が入力されていなくても、始動信号をONするだけで、加速
時間の設定にしたがって、モータが設定速度で回転しますので注意してください。
参照パラメータ
Pr.13 始動速度 111ページ参照
Pr.15 JOG速度設定 102ページ参照
Pr.125 端子2速度設定ゲイン速度、Pr.126 端子4速度設定ゲイン速度 98
152ページ参照
回転速度を制限する
4.7.2
機械共振点を避ける(速度ジャンプ)(Pr.31∼Pr.36)
機械系の固有振動数による共振を避けて運転したいときに、共振発生速度をジャンプさせることができます。
パラメータ
名 称
番号
31
32
初期値
速度ジャンプ1A
速度ジャンプ1B
9999
0∼4800r/min、
9999
速度ジャンプ2A
9999
34
速度ジャンプ2B
9999
35
速度ジャンプ3A
9999
速度ジャンプ3B
内 容
0∼4800r/min、
9999
33
36
設定範囲
9999
0∼4800r/min、
9999
0∼4800r/min、
9999
1A∼1B、2A∼2B、3A∼3Bがジャン
プする速度
9999:機能無効
0∼4800r/min、
9999
0∼4800r/min、
9999
9999
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
3000r/min を超えた値を設定しても、回転速度は3000r/minで制限されます。
ジャンプ箇所は 3 カ所、ジャンプ速度は各箇所の上点または下
Pr.36
Pr.35
速度ジャンプ
点のいずれかに設定できます。
速度ジャンプ1A、2A、3Aの設定値がジャンプ点となり、ジャ
回
転
Pr.34
速
Pr.33
度
(r/min)
Pr.32
Pr.31
Pr.34:1050r/min
Pr.33:900r/min
Pr.33:1050r/min
Pr.34:900r/min
ンプ区間は、この速度で運転されます。
例1
900r/min∼1050r/minの間を900r/minに固定させる場合は、Pr.34 に1050r/
min、Pr.33 に900r/minを設定してください。
例2
900r/min∼1050r/minの間を1050r/minにジャンプさせる場合は、Pr.33 に
1050r/min、Pr.34 に900r/minを設定してください。
注 記
加減速中は設定範囲内の運転速度を通ります。
位置制御時、速度ジャンプは無効です。
4
パ
ラ
メ
|
タ
99
外部端子による速度設定
4.8 外部端子による速度設定
目的
設定が必要なパラメータ
端子の組み合わせで速度制御する
多段速運転
寸動(JOG)運転する
端子による無段階速度設定
JOG運転
遠隔設定機能
4.8.1
参照ページ
Pr.4∼Pr.6、Pr.24∼Pr.27、
Pr.232∼Pr.239
Pr.15、Pr.16
Pr.59
100
102
105
多段速設定による運転(Pr.4∼Pr.6、Pr.24∼Pr.27、Pr.232∼Pr.239)
運転速度をあらかじめパラメータで設定し、その速度を接点端子で切り換える場合に使用できます。
接点信号(RH、RM、RL、REX信号)をON、OFFするのみで、各速度を選択できます。
パラメータ
名 称
番号
初期値
設定範囲
9999
0∼4800r/min
0∼4800r/min
0∼4800r/min
0∼4800r/min、 9999
4
5
6
24
25
3速設定(高速)
3速設定(中速)
3速設定(低速)
多段速設定(4速)
多段速設定(5速)
3000r/min
1500r/min
300r/min
9999
0∼4800r/min、 9999
26
多段速設定(6速)
9999
0∼4800r/min、 9999
27
232
233
234
235
236
237
238
239
多段速設定(7速)
多段速設定(8速)
多段速設定(9速)
多段速設定(10速)
多段速設定(11速)
多段速設定(12速)
多段速設定(13速)
多段速設定(14速)
多段速設定(15速)
9999
0∼4800r/min、 9999
9999
0∼4800r/min、 9999
9999
0∼4800r/min、 9999
9999
0∼4800r/min、 9999
9999
0∼4800r/min、 9999
9999
0∼4800r/min、 9999
9999
0∼4800r/min、 9999
9999
0∼4800r/min、 9999
9999
0∼4800r/min、 9999
内 容
RH-ON時の速度
RM-ON時の速度
RL-ON時の速度
RH、RM、RL、REX信号の組み合わせによ
り、4速∼15速の速度設定が可能
9999:選択しない
上記パラメータは、Pr.77 パラメータ書込選択 を“0”(初期値)にしてあっても運転中、運転モードに関係なく設定値を変更することができます。
Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
3000r/min を超えた値を設定しても、回転速度は3000r/minで制限されます。
(1)
回転速度
1速(高速)
RH
RM
RL
定された速度で運転します。
2速
(中速)
3速
(低速)
(r/min)
3速設定(Pr.4∼Pr.6)
RH信号-ONでPr.4、RM信号-ONでPr.5、RL信号-ONでPr.6 に設
時間
ON
ON
ON
備 考
初期設定では、2速以上が同時に選択されると低速信号側の設定速度になります。
例えば、RH、RM信号-ONの場合RM信号(Pr.5)が優先されます。
RH、RM、RL 信号は、初期設定で端子 RH、RM、RL に割り付けられています。Pr.178 ∼ Pr.184( 入力端子機能選択 ) に、
“0(RL)”、
“1(RM)”、
“2(RH)”を設定することで他の端子に割り付けることもできます。
100
外部端子による速度設定
(2)
4速以上の多段速設定(Pr.24∼Pr.27、Pr.232∼Pr.239)
RH、RM、RL、REX信号の組み合わせによって4速∼15速の設定が可能となります。Pr.24∼Pr.27、Pr.232∼Pr.239 に運
転速度を設定してください(初期値は、4速∼15速が使用できない設定となっています)。
REX信号入力に使用する端子は、Pr.178∼Pr.184(入力端子機能選択) に“8”を設定して機能を割り付けてください。
回
転
速
度
(r/min)
10速
5速
6速
11速
12速
9速
4速
ドライブユニット
13速
14速
15速
8速
7速
正転
STF
REX
ON
RH
RM
RL
ON
ON ON
ON ON
ON
ON
ON
ON
時間
ON ON
ON
多段速
選択
ON
ON ON ON ON ON ON ON ON
REX
ON ON ON ON
ON ON
RH
RM
10
2
5
速度
設定器
RL
SD
多段速運転の結線例
*1
Pr.232 多段速設定(8速)=“9999”設定時、RH、RM、RLをOFF、REXをONとするとPr.6 の速
度で動作します。
備 考
外部信号による速度指令の優先順位は、
「JOG運転>多段速運転>端子4アナログ入力>端子2アナログ入力」となります。
(アナログ入力による速度指令については152ページ を参照してください)
外部運転モードまたは、PU/外部併用運転モード(Pr.79 =“3または4”)にて有効です。
多段速度パラメータ設定は、PU運転中および外部運転中でも可能です。
Pr.24∼Pr.27、Pr.232∼Pr.239 の設定値の順位性はありません。
Pr.59 遠隔機能選択 ≠“0”の場合、RH、RM、RL信号は遠隔設定用信号となるので、多段速設定は無効となります。
注 記
Pr.178∼184 (入力端子機能選択) により端子割付の変更を行うと、他の機能に影響を与えることがあります。各端子の機能を
確認してから設定を行ってください。
参照パラメータ
Pr.15 JOG速度設定 102ページ参照
Pr.59 遠隔機能選択 105ページ参照
Pr.79 運転モード選択 165ページ参照
Pr.178∼Pr.184 (入力端子機能選択) 120ページ参照
4
パ
ラ
メ
|
タ
101
外部端子による速度設定
4.8.2
JOG運転(Pr.15、Pr.16、JOG信号、JOG2信号)
JOG運転用の速度と加減速時間が設定できます。
コンベアの位置合わせや試運転などに利用できます。
パラメータ
番号
15
16
名 称
JOG速度設定
JOG加減速時間
初期値
設定範囲
150r/min
0∼4800r/min
0.5s
0∼360s
内 容
JOG運転時の速度
JOG運転時の加減速時間
加減速時間は、Pr.20 加減速基準速度 に設定された速度(初期値は
3000r/min)までの時間
また、加減速時間は別々に設定不可
パラメータユニット(FR-PU07)接続時のみシンプルモードパラメータとして表示されます。パラメータユニット未接続時は、上記パラメータは、Pr.160 拡
張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
JOG運転中に設定値を変更しても反映されません。JOG運転停止時に設定値が反映されます。
3000r/min を超えた値を設定しても、回転速度は3000r/minで制限されます。
(1)
位置制御時のJOG運転
位置制御を行う場合は、SON信号(もしくはLX信号)をONしてください。SON信号とLX信号の説明は、114 ページ を参
照ください。
SON信号入力に使用する端子は、Pr.178∼Pr.184(入力端子機能選択) に“86”を設定して機能を割り付けてください。
LX信号入力に使用する端子は、Pr.178∼Pr.184(入力端子機能選択) に“23”を設定して機能を割り付けてください。
位置制御JOG運転では、原点復帰は不要です。原点復帰を行っていない場合は、SON信号(もしくはLX信号)をONした位
置を原点とします。
JOG運転の動作範囲は、位置指令データ設定範囲(-99999999∼99999999)内での動作となります。範囲外まで移動し
ようとした場合は、目標位置は99999999(正の場合)または-99999999(負の場合)で停止します。
102
外部端子による速度設定
(2)
外部からのJOG運転
JOG(JOG2)信号ONで始動信号(STF、STR)にて始動、停止が行えます。
JOG運転選択に使用する端子は、Pr.178∼Pr.184(入力端子機能選択) に“5”を設定して機能を割り付けてください。
CC-Link通信などのネットワークからJOG運転を行う場合は、JOG2信号を使用してください。
JOG運転選択2に使用する端子は、Pr.178∼Pr.184(入力端子機能選択) に“30”を設定して機能を割り付けてください。
(120ページ参照)
回転速度(r/min)
ドライブユニット
3相交流
電源
Pr.20
Pr.15 JOG速度設定
設定範囲
正転
時間
逆転
正転始動
逆転始動
JOG信号
Pr.16
U
V
W
モータ
SD
10
2
5
SON信号
∗端子RHに割り付ける場合
JOG信号
正転STF
R/L1
S/L2
T/L3
STF
STR
RH(JOG)∗
外部JOG運転の結線例
ON
ON
逆転STR
ON
操 作
1. 電源投入時画面
表 示
外部運転モードであることを確認して
ください。(【EXT】点灯)
表示しない場合は
で外部(EXT)運
転モードにしてください。それでも運
転モードが切り換わらない場合は、
Pr.79 にて外部運転モードにしてくださ
い。
2. JOGスイッチをONします。
JOG
ON
3. 始動スイッチ(STFまたはSTR)をONし
ます。
始動スイッチ(STFまたはSTR)がON
正転
逆転
ON
ONしている間回転
されている間モータが回転します。
150r/minで回転します。(Pr.15 の初
4
期値)
4. 始動スイッチ(STFまたはSTR)をOFF
します。
正転
逆転
停止
パ
ラ
メ
|
タ
OFF
備 考
運転速度を変更したい場合は、Pr.15 JOG速度設定 を変更してください。(初期値“150r/min”)
加減速時間を変更したい場合は、Pr.16 JOG加減速時間 を変更してください。(初期値“0.5s”)
JOGの加速時間と減速時間は別々に設定できません。
103
外部端子による速度設定
(3)
PUからのJOG運転
速度制御時、操作パネルおよびPU(FR-PU07)でJOG運転モードとします。始動ボタンを押している間だけ運転します。
ドライブユニット
U
R/L1
V
S/L2
W
T/L3
3相交流
電源
モータ
操作パネル
操 作
表 示
1. 運転表示と運転モード表示の確認
モニタモードであること。
停止中であること。
2.
を押してPUJOG運転モードにし
ます。
3.
を押します。
が押されている間モータが回転
します。
押し続ける
150r/minで回転します。(Pr.15 の初
期値)
4.
停止
をはなします。
はなす
【PUJOG運転の速度を変更する場合】
5.
を押してパラメータ設定モードに
PRM表示が点灯します。
します
(以前に読み出したパラメータの番号を
表示します)
6.
を回してPr.15 JOG速度設定 に合
わせます。
7.
を押すと現在設定されている値が
表示されます。(150r/min)
8.
を回して設定値を“
”に
します。(300r/min)
9.
を押して設定します。
フリッカー・・・パラメータ設定完了!!
10.操作1∼4を行います。
300r/minでモータが回転します。
104
外部端子による速度設定
注 記
Pr.15 設定値は、Pr.13 始動速度 の設定値以上の値としてください。位置制御時に、Pr.15 に“0r/min”を設定すると、位置
指令が作成されず停止状態のままとなります。
JOG信号(JOG2信号)は、Pr.178∼184 (入力端子機能選択) により、入力端子に割り付けることができます。端子割付の変更
を行うと、他の機能に影響を与えることがあります。各端子の機能を確認してから設定を行ってください。
JOG運転中は、RT信号による第2加減速には切換えできません。(他の第2機能は有効(123ページ参照))
Pr.79 運転モード選択 =“4”の場合、操作パネルの
/
、およびPU(FR-PU07)の
の1プッシュで始動し、
で
停止となります。
Pr.79 =“3”の場合、この機能は無効です。
参照パラメータ
4.8.3
Pr.29 加減速パターン選択 112ページ参照
Pr.20 加減速基準速度、Pr.21 加減速時間単位 108ページ参照
Pr.79 運転モード選択 165ページ参照
Pr.178∼Pr.184 (入力端子機能選択) 120ページ参照
遠隔設定機能(Pr.59)
操作盤と制御盤の距離が離れていても、アナログ信号を使わずに、接点信号で連続可変速運転ができます。
遠隔操作箱(FR-FK)の機能の内、加速、減速、設定クリアの設定動作の部分をパラメータの設定だけで得ることがで
きます。
内 容
パラメータ
名 称
番号
59
初期値
遠隔機能選択
設定範囲
RH、RM、RL信号
機能
速度設定
記憶機能
0
多段速設定
1
遠隔設定
あり
2
遠隔設定
なし
遠隔設定
なし
(STF/STR-OFFで遠隔設
定速度をクリア)
0
3
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
正転
加速
減速
クリア
ドライブユニット
STF
RH
RM
10
RL
2
SD
5
Pr.59=3の場合
加速(RH)
0r/min
ON
時間
ON
電源
ON
4
ON
減速(RM)
クリア(RL)
正転(STF)
Pr.59=2、3の場合
*
0
遠隔設定の結線例
Pr.59=1の場合
Pr.59=1、2の場合
回
転
速
度
(r/min)
ON
ON
ON
ON
ON
パ
ラ
メ
|
タ
ON
ON
外部運転速度(多段速以外)またはPU運転速度
105
外部端子による速度設定
(1)
遠隔設定機能
Pr.59 にて、遠隔設定機能の有無および遠隔設定時の速度設定値記憶機能の有無を選択します。
Pr.59 =“1∼3”(遠隔設定機能有効)と設定したときに、RH、RM、RL信号の機能は、加速(RH)、減速(RM)、クリア
(RL)に変更されます。
遠隔設定機能使用時は、RH、RM操作で設定した速度に対し、運転モードに応じて下記速度を補正できます。
外部運転時(Pr.79 =“4”含む) ................. 多段速以外の外部運転速度
外部、PU併用運転時(Pr.79 =“3”)........ PU運転速度または端子4入力
PU運転時...................................................... PU運転速度
(2)
速度設定値記憶
速度設定値記憶機能は、遠隔設定速度(RH、RM操作で設定した速度)をメモリ(EEPROM)に記憶します。
電源をいったん遮断後、再投入した場合の回転速度は、この設定値で運転を再開します。(Pr.59 =1)
<速度設定値記憶条件>
始動信号(STFまたはSTR)がOFFとなった時点
RH(加速)、RM(減速)信号が共にOFF(ON)の状態から1分毎(1分毎に現在の速度設定値と過去の速度設定値を比
較し、違っていたら書き込みます。RL信号では書き込みません。)
注 記
RH(加速)、RM(減速)により、変化できる速度は、0∼上限速度
(Pr.1 の設定値)ですが、設定速度の上限は(主速設定+上限速度)
(r/min)
設定速度は(主速+Pr.1)でクランプ
までです。
回転速度はPr.1
でクランプ
設定速度
Pr.1
回転速度
主速設定
0Hz
時間
ON
加速(RH)
ON
減速(RM)
正転(STF)
ON
加速、減速信号ON時の設定速度の変化は、Pr.44 第2加減速時間、Pr.45 第2減速時間 の設定時間での加減速となります。た
だし、Pr.7 またはPr.8 の設定時間が長い場合、Pr.7 またはPr.8 の加減速時間となります。(RT信号=OFFの場合)
RT信号=ONの場合は、Pr.7 またはPr.8 の設定値に関係なく、Pr.44 およびPr.45 の設定時間での加減速となります。
始動信号(STFまたはSTR)が、OFFの場合でも加速(RH)、減速(RM)信号をONすると、設定速度が変化します。(Pr.59 =“1、2”)
始動信号のON→OFFやRH、RM信号による速度変化を頻繁に行う場合は、速度設定値記憶機能(EEPROMへの書込み)をなし
(Pr.59 =“2、3”)に設定してください。
あり(Pr.59 =“1”)に設定するとEEPROMに頻繁に速度を書き込むので、EEPROMの寿命が短くなります。
RH、RM、RL信号は、Pr.178∼184(入力端子機能選択) により、入力端子に割り付けることができます。端子割付の変更を行
うと、他の機能に影響を与えることがあります。各端子の機能を確認してから設定を行ってください。
ネットワーク運転モードでも使用可能です。
位置制御時、遠隔設定機能は無効です。
106
外部端子による速度設定
備 考
JOG運転中およびPID制御運転中は、遠隔設定機能は無効です。
設定速度が“0”の場合
RH および RM 信号が共に
号ONで遠隔設定速度をクリ
アしても、RHおよびRM信号
前回記憶された遠隔設定速度
回転速度
OFF(ON)の後RL(クリア)信
1分以内
前回記憶された遠隔設定速度
が 共 にOFF(ON) か ら の 運 転
時間が1分経過前に電源を再
(r/min)
時間
投入すると前回記憶した遠隔
設定速度で運転します。
加速(RH)
減速(RM) OFF
クリア(RL)
ON
ON
電源
RH および RM 信号が共に
号ONで遠隔設定速度をクリ
アして、RHおよびRM信号が
共 にOFF(ON)か ら の 運 転 時
間が1分経過後に電源を再投
前回記憶された遠隔設定速度
1分
回転速度
OFF(ON)の後RL(クリア)信
ON
ON
ON
ON
正転(STF)
1分以上
設定速度0r/minでの
運転となります。
(r/min)
時間
入すると遠隔設定速度はクリ
アされた速度で運転します。
加速(RH)
減速(RM) OFF
ON
ON
クリア(RL)
正転(STF)
電源
ON
ON
ON
ON
注意
この機能を選択する場合には、上限速度を機械に合わせて設定し直してください。
参照パラメータ
Pr.1 上限設定 98ページ参照
Pr.7 加速時間、Pr.8 減速時間、Pr.44 第2加減速時間、Pr.45 第2減速時間 Pr.178∼184(入力端子機能選択) 120ページ参照
108ページ参照
4
パ
ラ
メ
|
タ
107
加減速時間と加減速パターンの設定
4.9 加減速時間と加減速パターンの設定
目的
設定が必要なパラメータ
モータ加減速時間の設定
加減速時間
始動速度を設定
用途に合った加減速パターンを設定
始動速度
加減速パターン
4.9.1
参照ページ
Pr.7、Pr.8、Pr.20、Pr.44、
Pr.45、Pr.147、375、Pr.791、
Pr.792
Pr.13
Pr.29
108
111
112
加速時間、減速時間の設定
(Pr.7、Pr.8、Pr.20、Pr.44、Pr.45、Pr.147、Pr.375、Pr.791、Pr.792)
モータの加減速時間を設定します。
ゆっくり加減速したいときは長く、速く加減速したいときは短く設定してください。
パラメータ
名 称
番号
7
8
初期値
設定範囲
5s
0∼360s
モータ加速時間
5s
0∼360s
モータ減速時間
加速時間
減速時間
内 容
加減速時間の基準となる速度
20
加減速基準速度
3000r/min
12∼4800r/min
44
第2加減速時間
5s
0∼360s
RT信号ON時の加減速時間
45
第2減速時間
0∼360s
RT信号ON時の減速時間
9999
加減速時間切換え
速度
147
加速時間=減速時間
0∼4800r/min
9999
9999
加速度異常検出レ
ベル
375
9999
9999
791
低速域加速時間
9999
792
低速域減速時間
9999
低速域(600r/min以下)加速時間
0∼3600s
低速域(600r/min以下)減速時間
Pr.8 が減速時間
9999
Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
3000r/min を超えた値を設定しても、回転速度は3000r/minで制限されます。
モータ回転速度の加速度が設定値を超えた場
合、加速度異常(E.OA)となる
Pr.7 が加速時間
9999
効になる速度
加速度異常検出を行わない
0∼3600s
Pr.44、Pr.45 の加減速時間の自動切換えが有
機能なし
0∼4800r/min/ms
9999
加減速時間は、停止∼Pr.20 間の速度変化時間
加速時間の設定(Pr.7、Pr.20)
(1)
Pr.7 加速時間 は、停止からPr.20 加減速基準速度 まで加速する時間を設定し
運転速度
(r/min)
時間
回転速度
Pr.20
(3000r/min)
加速 Pr.7
時間 Pr.44
減速 Pr.8
時間 Pr.45
ます。
次式により加速時間を設定します。
加速時間設定値 =
Pr.20
×
最大使用速度
例) Pr.20 =“3000r/min(初期値)”という条件で、回転速度を最大使用
速度2500r/minまで10sで加速させる場合のPr.7 の設定値
Pr.7 =
停止から最大使用速度
までの加速時間
3000r/min
2500r/min
× 10s=12s
減速時間の設定(Pr.8、Pr.20)
(2)
Pr.8 減速時間 は、Pr.20 加減速基準速度 から停止まで減速する時間を設定します。
次式により減速時間を設定します。
減速時間設定値
=
Pr.20
最大使用速度−Pr.10
×
最大使用速度から
停止までの減速時間
Pr.11 =“0”の場合です。Pr.11≠ “0”の場合、「-Pr.10 」は不要です。
例) Pr.20 =“3000r/min”、Pr.10 =“90r/min(初期値)”、Pr.11 =“0”
3000r/min
× 10s≒12.5s
という条件で、回転速度を最大使用速度2500r/minから10sで減速さ Pr.8 =
2500r/min−90r/min
せる場合のPr.8 の設定値
1
0
8
加減速時間と加減速パターンの設定
(3)
2種類の加減速時間を設定する(RT信号、Pr.44、Pr.45、Pr.147 )
Pr.44、Pr.45 はRT信号がON、または回転速度がPr.147 の設定値以上になったときに有効になります。
Pr.45 に“9999”を設定すると、減速時間は加速時間(Pr.44) と同一になります。
RT信号は、Pr.178∼184(入力端子機能選択) に“3”を設定し機能を割り付けてください。
RT信号-ONまたは、回転速度がPr.147 の設定値以上になると、加減速時間が切り換わります。
Pr.147 設定値
加減速時間
Pr.7、Pr.8
Pr.44、Pr.45
回転速度<Pr.147:Pr.7、Pr.8
Pr.147 ≦回転速度:Pr.44、Pr.45
Pr.7、Pr.8
9999(初期値)
0r/min
1r/min≦Pr.147 ≦設定速度
設定速度<Pr.147
内容
加減速時間自動切換えなし
始動時から第2加減速時間
加減速時間自動切換え動作
切換え速度未到達のため、切換え不可
Pr.147 に設定された速度未満であっても、RT信号による切換えが発生した時は第2加減速時間に切り換わります。
回転速度
(r/min)
設定
速度
Pr.147
設定値
時間
Pr.7
Pr.44
の傾き の傾き
加速時間
Pr.44
Pr.8
(Pr.45) の傾き
の傾き
減速時間
注 記
端子割付の変更を行うと、他の機能に影響を与えることがあります。各端子の機能を確認してから設定を行ってください。
(4)
加速度異常検出(Pr.375)
装置が異物に衝突した場合など、モータ回転速度の加速度が大きくなった場合に、加速度異常 (E.OA) を発生させてア
ラーム停止することができます。モータ回転速度はドライブユニット内部で演算される回転速度を使用しています。
Pr.375 加速度異常検出レベル の設定は、加減速時間の傾きの設定より十分大きな設定としてください。Pr.375 加速度
異常検出レベル の設定が、加減速時間の傾きよりも小さい場合、通常運転でも加速度異常(E.OA)が発生します。
通常運転の加減速度の傾きが急加減速となっていて、通常運転で加速度異常(E.OA)が発生する場合は、加速度異常検出
は使用できませんので、Pr.375 =“9999”に設定して加速度異常検出は行わないでください。
回転速度(r/min)
速度指令
回転速度
Pr.375
0
時間
4
加速度(r/min/ms)
E.OA
パ
ラ
メ
|
タ
Pr.375
0
時間
E.OA
異常出力
E.OA
109
加減速時間と加減速パターンの設定
低速域の加減速時間の設定(Pr.791、Pr.792 )
(5)
低速域(600r/min以下)においてトルクが必要な場合は、Pr.791 低速域加速時間 、Pr.792 低速域減速時間 にPr.7 加速
時間 、Pr.8 減速時間 より大きな値を設定し、低速域のみ緩やかに加減速させるようにしてください。
加速時間は、停止からPr.20 加減速基準速度 まで加速する時間を設定し、減速時間は、Pr.20 加減速基準速度 から停止
まで減速する時間を設定します。
回転速度
(r/min)
低速域(600r/min以下)
時間
低速域加速時間
Pr.791の傾き
加速時間
Pr.7の傾き
減速時間
Pr.8の傾き
低速域減速時間
Pr.792の傾き
備 考
RT信号は第2機能選択信号となり、他の第2機能も有効となります。(123ページ参照) )
Pr.20 の設定を変更してもPr.125、Pr.126(速度設定信号ゲイン速度) の設定値は変化しません。
ゲインを調整する場合は、Pr.125、Pr.126 を設定してください。
Pr.791 、Pr.792 はそれぞれPr.7 、Pr.8 より大きな値を設定してください。Pr.791 < Pr.7 、Pr.792 < Pr.8 と設定した場合
はPr.791 = Pr.7 、Pr.792 = Pr.8 として動作します。
加減速時間を設定しても、実際のモータ加減速時間は、機械系のJ(慣性モーメント)とモータトルクで決まる最短加減速時間
より短くすることはできません。
注 記
位置制御時、Pr.7 、Pr.8 、Pr.44 、Pr.45 、Pr.147 、Pr.791 、Pr.792 は無効です。(77ページ 参照)
参照パラメータ
Pr.10 フリーラン速度 114ページ参照
Pr.29 加減速パターン選択 112ページ参照
Pr.125、Pr.126 (速度設定ゲイン速度) 152ページ参照
Pr.178∼Pr.184 (入力端子機能選択) 120ページ参照
110
加減速時間と加減速パターンの設定
4.9.2
モータ始動速度(Pr.13)
始動時の速度を設定することができます。
アナログ入力による速度設定をする場合などに、ノイズやオフセットずれの影響をなくすため、低速の不感帯を設
定できます。
パラメータ
名 称
番号
13
始動速度
初期値
設定範囲
15r/min
0∼4800r/min
内 容
モータ始動を開始する速度
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
3000r/min を超えた値を設定しても、回転速度は3000r/minで制限されます。
PMモータが始動を開始する設定速度を設定できます。
Pr.13 始動速度 で設定された値未満の速度指令に対しては、始動指
回転速度
(r/min)
令(正転または逆転)入力でゼロ速制御となります。
速度指令が設定値以上になるとPMモータはPr.7 加速時間 に従って
加速します。
設定速度
回転速度
Pr.13
0
時間
正転
ON
注 記
位置制御時、始動速度は無効です。
注意
Pr.13 をPr.2 下限設定 以下の値に設定すると、指令速度が入力されていなくても、始動信号をONするだけで、モー
タが設定速度で回転しますので注意してください。
参照パラメータ
Pr.2 下限設定 Pr.7 加速時間 98ページ参照
108ページ参照
4
パ
ラ
メ
|
タ
111
加減速時間と加減速パターンの設定
4.9.3
加減速パターン(Pr.29)
用途に合った加減速パターンを設定できます。
パラメータ
名 称
番号
29
初期値
加減速パターン選択
0
設定範囲
内 容
0
直線加減速
1
S字加減速A
2
S字加減速B
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
回転速度
設定値0
〔直線加減速〕
直線加減速(Pr.29 =“0”初期値)
(1)
ドライブユニット運転では、加速、減速など速度の変更時には、モータおよびド
ライブユニットに無理がかからないよう回転速度を直線的に変化(直線加減速)
させて、設定速度に到達させるようにしています。直線加減速とは、速度/時間
の勾配が一定の加減速です。
(r/min)
時間
設定値1
〔S字加減速A〕
3000
S字加減速A(Pr.29 =“1”)
(2)
回転速度
モータ定格回転速度 (3000r/min) が S 字の変曲点となる加減速パターンとなり
ます。
(r/min)
時間
注 記
S字加減速Aの加減速時間設定値は、Pr.20 加減速基準速度 ではなく、モータ定格回転速度までの時間を設定します。
設定値2
〔S字加減速B〕
(3)
S字加減速B(Pr.29 =“2”)
コンベアなどの荷崩れ防止用途など
設定速度
現在速度(f2)から目標速度(f1)までを常にS字として加減速するため、加減速
時のショックを緩和する効果があり、荷崩れ防止などに効果的です。
(r/min)
回転速度
f1
f2
(r/min)
時間
注 記
位置制御時、加減速パターン選択は無効です。(常に直線加減速として処理します。)
参照パラメータ
Pr.7 加速時間、Pr.8 減速時間、Pr.20 加減速基準速度 112
108ページ参照
モータの選択と保護
4.10 モータの選択と保護
4.10.1 モータの過熱保護(電子サーマル)(Pr.9)
電子サーマルの電流値を設定して、モータの過熱保護を行います。低速運転時、モータ冷却能力の低下も含んだ最適
な保護特性を得ることができます。
パラメータ
名 称
番号
9
電子サーマル
初期値
設定範囲
モータ定格電流
0∼500A
内 容
モータ定格電流を設定
モータ定格電流は、271 ページ を参照してください。
(1)
電子サーマル(Pr.9)
モータの過負荷(過熱)を検出し、ドライブユニットの出
力トランジスタの動作を止め出力停止します。(動作特性
500
450
400
を左図に示します)
モータの定格電流値(A)をPr.9 に設定します。
350
動 300
作
250
時
間 200
(s)150
モータに外部サーマルリレーを使用する時など、電子
サーマルを動作させたくない場合は、Pr.9 に“0”を設
定します。(ただしドライブユニットの出力トランジス
100
タの保護機能(E.THT)は動作します。)
50
0
40
60
80
100 120 140 160 180 200
ドライブユニット出力電流(%)
(モータ定格電流に対する%)
220
240
注 記
電子サーマルの内部熱積算値は、ドライブユニットの電源リセットおよび、リセット信号の入力により初期値にリセットさ
れます。不必要なリセットや電源遮断は避けてください。
(2)
電子サーマルプリアラーム(TH)と警報信号(THP信号)
100%:電子サーマルアラーム動作値
電子サーマル
動作レベル
電子サーマル警報
(THP)
OFF
ON
電子サーマル積算値がPr.9 の85%に達すると、電子サーマ
ルプリアラーム(TH)を表示するとともに警報信号(THP)
100%
を出力します。Pr.9 電子サーマル の設定値の100%に達す
85%
ると、電子サーマル保護(E.THM/E.THT)となります。
警報信号(THP)では、ドライブユニットは出力遮断しません。
THP信号出力に使用する端子は、Pr.190∼Pr.192 (出力端子
機能選択) のいずれかに“8(正論理)または、108(負論理)”
ON
時間
を設定して機能を割り付けてください。
注 記
Pr.190∼Pr.192 (出力端子機能選択) により端子割付の変更を行うと、他の機能に影響を与えることがあります。各端子の機
能を確認してから設定を行ってください。
(3)
4
外部サーマル入力(OH信号)
サーマルプロテクタ
ドライブ
ユニット U
V
W
OH
SD
モータ
M
外部サーマル入力結線例
モータの過熱保護のため、外部のサーマルリレーを使用する時に、OH 信号を使用し
ます。
サーマルリレーが動作したとき、ドライブユニットが出力を遮断し、異常信号
(E.OHT)を出力します。
OH信号入力に使用する端子は、Pr.178∼Pr.184 (入力端子機能選択) のいずれかに
“7”を設定して機能を割り付けてください。
注 記
Pr.178∼Pr.184 (入力端子機能選択) により端子割付の変更を行うと、他の機能に影響を与えることがあります。各端子の機
能を確認してから設定を行ってください。
参照パラメータ
Pr.178∼Pr.184 (入力端子機能選択) Pr.190∼Pr.192 (出力端子機能選択) 120ページ参照
126ページ参照
113
パ
ラ
メ
|
タ
モータのブレーキと停止動作
4.11 モータのブレーキと停止動作
目的
設定が必要なパラメータ
制動動作の調整
出力信号で電磁ブレーキを動作させる
オプションでモータ制動トルクをアッ
プさせる
モータをフリーラン停止させる
ゼロ速制御、サーボロック
電磁ブレーキインタロック
参照ページ
114
Pr.10、Pr.11、Pr.802
Pr.736
回生ブレーキの選択
モータ停止方法の選択
117
Pr.30、Pr.70
118
Pr.10、Pr.11、Pr.250
119
4.11.1 ゼロ速制御と予備励磁、サーボオン、サーボロック(Pr.10、Pr.11、Pr.802、LX信号、
SON信号)
モータ停止時にゼロ速制御を行い、モータに制動トルクかけます。
パラメータ
名 称
番号
10
フリーラン速度
11
直流制動動作時間
802
初期値
設定範囲
90r/min
0∼4800r/min
0
0.5s
予備励磁選択(制動動作選択)
モータがフリーランとなる速度
ゼロ速制御なし
0.1∼10s
0
内 容
ゼロ速制御の動作時間
0
ゼロ速制御
1
サーボロック
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
3000r/min を超えた値を設定しても、回転速度は3000r/minで制限されます。
(1)
動作速度の設定(Pr.10)
Pr.10 にフリーランさせる速度を設定すると、減速時にこの速度になると出力遮断してモータはフリーランとなります。
Pr.11 ≠“0”の場合、Pr.10 は0r/min固定となります。
(2)
動作時間の設定(Pr.11)
ゼロ速制御をかけている時間をPr.11 に設定します。
負荷モーメント(J)が大きく、モータが停止しない場合に設定値を大きくすると効果があります。
Pr.11 =“0s”とすると、ゼロ速制御動作はしません。(停止時、モータはフリーランとなります。)
ゼロ速制御ありの動作例(Pr.11≠“0”)
(r/min)
回転速度
回転速度
0r/minでゼロ速制御
ゼロ速制御なしの動作例(Pr.11=“0s”)
(r/min)
時間
時間
ゼロ速制御
時間
Pr.11 動作時間
114
Pr.10
フリーラン速度
モータフリーラン
ゼロ速制御
時間
モータのブレーキと停止動作
(3)
サーボオン信号(SON信号)
SON信号をONにするとベース回路に電源が入り、運転可能状態になります(サーボオン状態)。OFFにするとベース遮
断になりモータはフリーラン状態になります。
SON信号をONにすると停止中にゼロ速制御またはサーボロックを行います。(停止時にSON信号をOFF→ONにした時
には初期磁極検出を行います。)
SON信号を入力端子に割りつけると、SON信号をONにしないと始動信号(STF、STR信号)を受け付けません。また、
SON信号を入力端子に割りつけた場合、予備励磁信号(LX信号)は無効となります。
SON信号は全ての運転モードで有効です。例えばPU運転モードでも、SON信号がOFFの場合は運転できません。
SON信号は、Pr.178∼Pr.184(入力端子機能選択) に “86”を設定し機能を割り付けてください。
SON信号をONにして運転可能状態になると、運転準備完了2(RY2)信号がONになります。出力遮断中(MRS信号)は
OFF します。
運転準備完了2信号(RY2)は、Pr.190∼Pr.192(出力端子機能選択) に“33(正論理)”または、“133(負論理)”を設定し
て機能を割り付けてください。
(4)
予備励磁信号(LX信号)
LX信号をONすると停止中にゼロ速制御またはサーボロックを行います。
LX信号がONの場合の減速停止は、Pr.10 、Pr.11 の設定にかかわらず、0r/minまで減速しゼロ速制御またはサーボロッ
クを行います。
予備励磁中からの起動時は初期磁極検出を行わないため、起動遅れ時間を無くす事ができます。(停止時にLX信号をOFF
→ONにした時には初期磁極検出を行います。)
LX信号は、Pr.178∼184(入力端子機能選択)に“23”を設定し機能を割り付けてください。
運転準備完了2信号(RY2)は予備励磁開始時にONします。
ドライブユニット停止時も予備励磁が動作している間はON します。出力遮断中(MRS信号)はOFF します。
運転準備完了2 信号(RY2)は、Pr.190∼Pr.192(出力端子機能選択) に“33(正論理)”または、
“133(負論理)”を設定
して機能を割り付けてください。
(5)
制動動作選択(Pr.802)
速度制御時に、予備励磁を行った場合の制動動作をPr.802 でゼロ速制御にするかサーボロックにするかを選択します。
位置制御時は、Pr.802 の設定値にかかわらず、サーボロックとなります。
Pr.802 設定値
予備励磁
内容
負荷がかかっていても、モータの軸が回らないように0r/min を保とうとします。ただし、外力に
0(初期値)
ゼロ速制御
負けて軸が動いた場合は、元の位置には戻りません。
位置制御を行わずに、速度制御のみで動作します。
負荷がかかっても、モータの軸の位置を維持しようとします。ただし、外力に負けて軸がうごい
ても外力が無くなった後に元の位置に戻ります。
1
サーボロック 位置制御を行うため、この位置ループゲインをPr.422 位置制御ゲイン にて調整することができ
ます。また、Pr.698 速度制御Dゲイン を調整することで、不安定現象(振動現象)を抑制するこ
ともできます。
4
パ
ラ
メ
|
タ
115
モータのブレーキと停止動作
速度制御時の動作
SON信号割付あり
始動信号状態
OFF
始動信号(STF、STR)
SON信号割付なし
SON信号ON
SON信号OFF
LX信号ON
LX信号OFF
または
LX信号割付なし
ゼロ速制御または
サーボロック
ベース遮断
ゼロ速制御または
サーボロック
ベース遮断
運転
ベース遮断
運転
運転
ON
OFF
ON
ON
ON
RY 信号(ドライブユニット運転準備完了)
・速度制御 SON信号による動作例
ON
ON
ON
ON
回転速度
STF
SON
初期磁極検出
(約100ms)
(r/min)
時間
予備励磁
(ゼロ速制御またはサーボロック)
RY
時間
ON
ON
RY2
・速度制御 LX信号による動作例
ON
ON
ON
ON
回転速度
STF
LX
(r/min)
初期磁極検出
(約100ms)
予備励磁
(ゼロ速制御またはサーボロック)
初期磁極検出
(約100ms)
時間
Pr.11 動作時間
(Pr.11 ≠“0”の場合)
ON
RY
RY2
時間
ON
ON
位置制御時の動作
始動信号状態
OFF
ON
RY 信号(ドライブユニット運転準備完了)
始動信号(STF、STR)
SON信号割付あり
SON信号ON
SON信号OFF
SON信号割付なし
LX信号ON
LX信号OFF
サーボロック
ベース遮断
サーボロック
ベース遮断
運転
ベース遮断
運転
ベース遮断
ON
OFF
ON
ON
注意
PMモータは磁石モータのため、モータが回転している間は、モータの端子に高電圧が発生しています。感電の原因
となりますので、モータが停止するまではモータ端子などに触れないでください。
参照パラメータ
Pr.13 始動速度 116
111ページ参照
モータのブレーキと停止動作
4.11.2 電磁ブレーキを動作させる(MBR信号、Pr.736)
電磁ブレーキインタロック信号(MBR)で、電磁ブレーキの動作をさせることができます。
パラメータ
名 称
番号
初期値
設定範囲
内 容
ドライブユニット始動時に、MBR信号出力後、初期
電磁ブレーキインタ
ロック時間
736
0∼1s
0s
磁極検出を開始するまでの時間を設定
電磁ブレーキの開放遅れ時間(リレー動作遅れなども
含む)以上を設定
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
電磁ブレーキインタロック信号(MBR)出力から実始動開始までの遅れ時間を、Pr.736 電磁ブレーキインタロック時間
に設定することで、電磁ブレーキ動作とのインタロックをとることができます。
MBR信号を割りつけていない場合でも、Pr.736 のインタロック時間は有効です。インタロック時間が不要の場合は、
Pr.736 =“0”に設定してください。
MBR信号出力に使用する端子は、Pr.190∼Pr.192(出力端子機能選択) に“21(正論理)または121(負論理)”を設定して
機能を割り付けてください。
電磁ブレーキ用動作回路は外部の非常停止でも動作するような二重の回路構成にしてください。
電磁ブレーキ用
電源
電磁ブレーキ
異常出力
インタロック(MBR) (ALM)
非常停止
電磁
ブレーキ
B
電源
ON
ON
STF
ON
RH
回
転
速
度
(r/min)
ゼロ速制御
またはサーボロック∗3
時間
リセット処理
RY
Pr.736
初期磁極検出
(約100ms)
ON
ON
RUN
ON
MBR
制動遅れ時間+
外部リレーなど∗2
開放遅れ時間+
外部リレーなど∗1
電磁ブレーキ動作
動作
動作
開放
4
電磁ブレーキは、電磁ブレーキ開放遅れ時間と外部回路のリレーなどの動作時間だけ遅れて開放されます。
電磁ブレーキは、電磁ブレーキ制動遅れ時間と外部回路のリレーなどの動作時間だけ遅れて制動動作します。
ドライブユニットのPr.10 =“0r/min”
、Pr.11 =“0.0s”に設定することで、減速時に0r/min に到達すると出力遮断してモータはフ
リーランとなります。
ドライブ
ユニット
始動信号
出力
状態 OFF(停止中)
信号
RY
RUN
MBR
停止中
(速度設定なし)
始動信号ON
停止中
(速度設定あり)
運転中
パ
ラ
メ
|
タ
ゼロ速制御中
出力遮断中
または
サーボロック中
ON
ON
ON
ON
ON
OFF
OFF
OFF
ON
OFF
OFF
OFF
OFF
OFF
ON
ON
ON
OFF
アラーム発生中またはMRS信号-ON
注 記
Pr.190∼Pr.192 (出力端子機能選択) により端子割付の変更を行うと、他の機能に影響を与えることがあります。各端子の機
能を確認してから設定を行ってください。(120ページ参照)
主回路コンデンサ寿命測定時にはMBR信号は動作しません。(220ページ参照)
ドライブユニットの運転開始前および直流制動動作完了後に電磁ブレーキが開放されている状態ではモータはトルクを発生
していないため、外力によりモータが回転する場合があります。昇降用途などブレーキ開放中にモータが回転してしまう用
途では、落下などが起きないよう確認してください。
117
モータのブレーキと停止動作
4.11.3 回生ブレーキの選択(Pr.30、Pr.70)
頻繁な始動・停止運転を行う場合、オプションのブレーキ抵抗器(MRS形)、高頻度用ブレーキ抵抗器(FR-ABR)や
ブレーキユニット(FR-BU2)を使用することにより回生ブレーキ使用率を大きくすることができます。
回生状態で連続して使用する場合に、電源回生共通コンバータ(FR-CV)を使用します。
さらに、高調波低減、力率改善を行う場合や、回生状態で連続して使用する場合に、高力率コンバータ(FR-HC2)
を使用することができます。
パラメータ
名 称
番号
初期値
30
回生機能選択
70
特殊回生ブレーキ使用率
0
0%
設定範囲
内 容
0
回生機能なし、
ブレーキ抵抗器(MRS形)、
ブレーキユニット(FR-BU2)
電源回生共通コンバータ(FR-CV)
高力率コンバータ(FR-HC2)
1
高頻度用ブレーキ抵抗器(FR-ABR)
0∼30%
高頻度用ブレーキ抵抗器(FR-ABR)使用時のブレーキ使用率
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
(1)
ブレーキ抵抗器(MRS形)、ブレーキユニット(FR-BU2)、電源回生共通コンバータ(FR-CV)、高力率コンバー
タ(FR-HC2)使用時
Pr.30 =“0(初期値)”に設定してください。Pr.70 の設定値は無効になります。
このとき、回生ブレーキ使用率は、3%です。
接点入力端子にドライブユニット運転許可信号(X10)を割り付けてください。FR-HC2、FR-CVと保護協調をとるため
に、ドライブユニット運転許可信号(X10)によりドライブユニット出力を遮断します。
FR-HC2のRDY信号(FR-CVのRDYB信号)を入力します。
X10信号入力に使用する端子は、Pr.178∼Pr.184 のいずれかに“10”(X10)を設定して機能を割り付けてください。
(2)
高頻度用ブレーキ抵抗器(FR-ABR)使用時(0.4K以上)
Pr.30 =“1”に設定してください。
Pr.70 =“10%”に設定してください。
(3)
回生ブレーキ使用率警報出力と警報信号(RBP信号)
回生ブレーキ使用率がPr.70 の設定値レベルの85%に
達 する と、操作 パ ネル に [RB] を 表示 し、警報 信号
(RBP)を出力します。Pr.70 の設定値の100%に達する
と、回生過電圧(E.OV1∼E.OV3)となります。
ただし、Pr.30 =“0”の場合は[RB]を表示しません。
警報信号では、ドライブユニットは出力遮断しません。
RBP信号出力に使用する端子は、Pr.190∼Pr.192 (出
力端子機能選択) のいずれかに“7( 正論理)または、
107(負論理)”を設定して機能を割り付けてください。
100%:回生過電圧保護動作値
ブレーキ使用率
のPr.70設定値
に対する割合(%)
100
85
時間
回生ブレーキ
プリアラーム
(RBP)
OFF
ON
ON
備 考
X10信号の代わりにMRS信号を使用することもできます。(122ページ参照)
ブレーキ抵抗器(MRS形)、高頻度用ブレーキ抵抗器(FR-ABR)、ブレーキユニット(FR-BU2)、高力率コンバータ(FR-HC2)、
電源回生共通コンバータ(FR-CV)の接続については、24∼28ページ を参照してください。
注 記
Pr.178∼Pr.184 (入力端子機能選択) 、Pr.190∼Pr.192 (出力端子機能選択) により端子割付の変更を行うと、他の機能に影響
を与えることがあります。各端子の機能を確認してから設定を行ってください。(120ページ参照)
危険
Pr.70 の設定値は使用するブレーキ抵抗器の設定値以上を設定しないでください。
過熱の危険があります。
参照パラメータ
Pr.178∼Pr.184 (入力端子機能選択) Pr.190∼Pr.192 (出力端子機能選択) 118
120ページ参照
126ページ参照
モータのブレーキと停止動作
4.11.4 停止選択(Pr.250)
始動信号をOFFしたときの停止方法(減速停止、フリーラン)を選択します。
始動信号OFFとともに、機械ブレーキでモータを停止させる場合などに使用します。
また、始動信号(STF/STR)の動作選択もできます。(始動信号選択については、124ページ を参照してください)
内 容
パラメータ
名 称
番号
初期値
始動信号(STF/STR)
設定範囲
0∼100s
1000s∼1100s
250
停止動作
(124ページ参照)
停止選択
9999
STF信号:正転始動
始動信号をOFFし、設定時間
STR信号:逆転始動
後フリーラン停止
STF信号:始動信号
始動信号をOFFし、(Pr.250
STR信号:正逆信号
−1000)s後にフリーラン停止
STF信号:正転始動
9999
8888
STR信号:逆転始動
始動信号をOFFすると減速停
STF信号:始動信号
止
STR信号:正逆信号
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
(1)
始動信号OFFにて減速
Pr.250 =“9999(初期値)、または8888”とします。
始動信号(STF/STR)OFFで、減速停止します。
回
転
速
度
(r/min)
始動信号
減速時間(Pr.8等の設定時間)
ゼロ速制御または
サーボロック
時間
OFF
ON
RUN信号
OFF
ON
(2)
始動信号OFFにて設定時間後
出力遮断
Pr.250
回
転
速
度
(r/min)
始動信号
モータを減速停止させる
モータはフリーラン停止
時間
OFF
ON
RUN信号
ON
OFF
モータをフリーラン停止させる
Pr.250 に始動信号をOFFしてから、出力遮断するまでの
時間を設定します。
“1000∼1100”の設定時は、(Pr.250
−1000)s後に出力遮断します。
始動信号OFF後、Pr.250 の設定時間を経過してから出力
遮断します。モータはフリーラン停止します。
RUN信号は、出力停止でOFFとなります。
備 考
Pr.250 ≠9999、8888の場合、始動信号をOFFして出力遮断するまでは、速度指令に応じて加減速します。
LX信号をONし、予備励磁を動作させている場合は、フリーラン停止の設定をしていても減速停止動作となります。
4
注 記
下記機能動作時は、停止選択は無効となります。
位置制御
パ
ラ
メ
|
タ
PU停止(Pr.75)
通信異常による減速停止(Pr.502)
JOG運転モード
モータフリーラン中からは再始動できませんので、フリーラン停止後に再度、始動信号を入れて始動してください。
注意
PMモータは磁石モータのため、モータが回転している間は、モータの端子に高電圧が発生しています。感電の原因
となりますので、モータが停止するまではモータ端子などに触れないでください。
参照パラメータ
Pr.7 加速時間、Pr.8 減速時間 108ページ参照
Pr.13 始動速度 111ページ参照
119
外部端子の機能割付と制御
4.12 外部端子の機能割付と制御
目的
設定が必要なパラメータ
入力端子に機能を割り付ける
MRS信号(出力遮断)をb接点仕様にす
る
始動信号と正逆指令を別信号に割り付
ける
出力端子に機能を割り付ける
回転速度を検出する
出力電流を検出する
リモート出力機能
Pr.178∼Pr.184
参照ページ
120
Pr.17
122
Pr.250
124
Pr.190∼Pr.192
126
Pr.41∼Pr.43、Pr.870
130
Pr.150∼Pr.153
131
Pr.495、Pr.496
133
入力端子機能選択
MRS入力選択
始動信号(STF/STR)動作選
択
出力端子機能割付
速度到達動作幅
回転速度検出
出力電流検出
ゼロ電流検出
リモート出力
4.12.1 入力端子機能選択(Pr.178∼Pr.184)
パラメータで入力端子の機能を選択・変更することができます。
パラメータ
名 称
番号
178
179
180
181
182
183
184
初期値
STF端子機能選択
STR端子機能選択
RL端子機能選択
RM端子機能選択
RH端子機能選択
MRS端子機能選択
RES端子機能選択
初期信号
60
STF(正転指令)
61
STR(逆転指令)
0
RL(低速運転指令)
1
RM(中速運転指令)
2
RH(高速運転指令)
24
MRS(出力停止)
62
RES(ドライブユニットリセット)
設定範囲
0∼5、7、8、10、12、14、16、
23∼25、29、30、44、60、61、
62、65∼67、76、86∼89、9999
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
“60”はPr.178 のみ設定可能です。
“61”はPr.179 のみ設定可能です。
(1)
入力端子の機能割付け
Pr.178∼Pr.184 により、各入力端子の機能を設定します。
下表を参照して、各パラメータを設定してください。
設定値
信号名
機 能
Pr.59 =0(初期値)
0
RL
Pr.59 =1、2
Pr.59 =0(初期値)
1
RM
Pr.59 =1、2
Pr.59 =0(初期値)
2
RH
Pr.59 =1、2
関連パラメータ
速度制御
低速運転指令
位置制御
テーブル選択信号
速度制御
遠隔設定(設定クリア)
位置制御
速度制御
中速運転指令
位置制御
テーブル選択信号
速度制御
遠隔設定(減速)
位置制御
速度制御
高速運転指令
位置制御
テーブル選択信号
速度制御
遠隔設定(加速)
位置制御
Pr.4∼Pr.6、Pr.24∼Pr.27
Pr.232∼Pr.239
Pr.59
Pr.4∼Pr.6、Pr.24∼Pr.27、
Pr.232∼Pr.239
Pr.59
Pr.4∼Pr.6、Pr.24∼Pr.27、
Pr.232∼Pr.239
Pr.59
○: 有効/×: 無効
参照
速度制御 位置制御
ページ
○
○
○
○
○
○
○
○
○
○
○
○
105
100
105
Pr.15、Pr.16
○
○
Pr.9
○
○
Pr.4∼Pr.6、Pr.24∼Pr.27、
Pr.232∼Pr.239
○
×
100
118
165
211
第2機能選択
Pr.44、Pr.45、Pr.48
○
×
端子4入力選択
Pr.267
○
×
5
JOG
JOG運転選択
8
REX
15速選択(RL、RM、RHの3速と組合わせ)
10
X10
ドライブユニット運転許可信号(FR-HC2/FR-CV接続)
Pr.30、Pr.70
○
○
12
X12
PU運転外部インタロック
Pr.79
○
○
14
X14
PID制御有効端子
Pr.127∼Pr.134
○
×
120
100
外部サーマル入力
RT
AU
OH
105
123
147
102
113
3
4
7
100
外部端子の機能割付と制御
機 能
関連パラメータ
○: 有効/×: 無効
参照
速度制御 位置制御
設定値
信号名
16
X16
PU−外部運転切換(X16-ONで外部運転)
Pr.79、Pr.340
○
○
23
LX
予備励磁
Pr.11
○
○
24
MRS
出力停止
○
STOP
始動自己保持選択
Pr.17
○
25
○
×
○
29
X29
押当て制御切換
Pr.512∼Pr.515
○
30
JOG2
JOG運転選択2
Pr.15、Pr.16
○
○
44
X44
P/PI制御切換(X44-ONでP制御)
○
×
60
STF
正転指令(STF端子(Pr.178)のみ割付可能)
Pr.820、Pr.821
○
○
61
STR
逆転指令(STR端子(Pr.179)のみ割付可能)
○
○
ページ
170
115
122
124
87
102
70
124
124
62
RES
ドライブユニットリセット
○
○
65
X65
PU−NET運転切換(X65-ONでPU運転)
Pr.79、Pr.340
○
○
66
X66
外部−NET運転切換(X66-ONでNET運転)
Pr.79、Pr.340
○
○
171
171
67
X67
指令権切換(X67-ONでPr.338、Pr.339 による指令が
有効)
Pr.338、Pr.339
○
○
173
91
115
85
86
86
76
X76
近点ドグ
Pr.532
×
○
86
87
SON
X87
サーボオン
急停止
Pr.802
Pr.464、Pr.535
○
○
○
○
88
LSP
正転ストロークエンド
Pr.464、Pr.535
○
○
89
LSN
逆転ストロークエンド
Pr.464、Pr.535
○
○
9999
機能なし
Pr.59 遠隔機能選択 =“1または2”の場合は、RL、RM、RH信号の機能が表のように変更されます。
OH信号 は、リレー接点「開」で動作します。
注 記
Pr.178∼Pr.184 (入力端子機能選択) により端子割付の変更を行うと、他の機能に影響を与えることがあります。各端子の機
能を確認してから設定を行ってください。
1個の機能を2個以上の複数の端子で割り付けることが可能です。この場合、各端子の入力の論理和がとられます。
速度指令の優先順位は、JOG(JOG2)、多段速設定(RH、RM、RL、REX)、PID(X14) の順となります。 X10信号(FR-HC2、FR-CV接続 ドライブユニット運転許可信号)が設定されていない場合と、Pr.79 運転モード選択 =“7”
でPU運転外部インターロック(X12)信号が割り付けられていない場合は、MRS信号がこの機能を共有します。
多段速(7速)、遠隔設定の割付けは共通の端子を使用します。個別に設定できません。
(共に速度設定のため同時に設定する必要がないため共通にしてあります。)
AU信号をONすると端子2(電圧入力)は無効になります。
(2)
各信号の応答時間について
X10信号、MRS信号の応答時間は、2ms以内です。
その他の信号の応答時間は20ms以内です。
4
パ
ラ
メ
|
タ
121
外部端子の機能割付と制御
4.12.2 ドライブユニット出力遮断信号(MRS信号、Pr.17)
MRS信号からドライブユニット出力を遮断できます。また、MRS信号のロジックの選択もできます。
パラメータ
名 称
番号
17
初期値
MRS入力選択
設定範囲
内 容
0
2
0
常時開入力
常時閉入力(b接点入力仕様)
外部端子:常時閉入力(b接点入力仕様)
通信 :常時開入力
4
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
(1)
出力遮断信号について(MRS信号)
ドライブユニット運転中に出力遮断信号(MRS)をONすると、瞬時に出
モータは
フリーラン停止
力を遮断します。
MRS信号には、次の使用方法があります。
(a)機械ブレーキ(電磁ブレーキなど)でモータを停止させる場合
機械ブレーキ動作時にドライブユニットの出力を遮断します。
(b)ドライブユニットでの運転ができないようにインターロックをとる
場合
時間
MRS信号
ON
STF(STR)
信号
ON
設定値0
MRS信号をONしておくと、ドライブユニットに始動信号が入って
も、ドライブユニットは、運転できません。
(初期値)
ドライブ
出力停止 ユニット
MRS
SD
(c)モータをフリーラン停止させる場合
始動信号をOFFした場合、ドライブユニットは、設定された減速時間
でモータを減速停止させますが、MRS信号をONした場合、モータは
設定値2
ドライブ
出力停止 ユニット
MRS
SD
フリーラン停止します。
(2)
MRS信号のロジック反転(Pr.17)
Pr.17 =“2”とすると、MRS信号(出力停止)を常時閉(b接点)入力仕
様に変えることができます。MRS信号ON(開)にてドライブユニットは
出力を遮断します。
通信からのMRS信号入力と外部端子によるMRS信号入力を異なる動作にする(Pr.17 =“4”)
Pr.17 =“4”とすると、外部端子によるMRS信号(出力停止)を常時閉(b接点)入力、通信からのMRS信号を常時開(a接
(3)
点)入力することができます。
外部端子によるMRS信号をONにしたまま、通信で運転する場合に便利です。
外部MRS
通信MRS
OFF
OFF
ON
ON
OFF
ON
OFF
ON
Pr. 17 設定値
0
2
4
運転可
出力遮断
出力遮断
出力遮断
出力遮断
出力遮断
出力遮断
運転可
出力遮断
出力遮断
運転可
出力遮断
備 考
MRS信号は、Pr.178∼Pr.184 (入力端子機能選択) に“24”を設定して機能を割り付けてください。
外部端子からMRS信号を入力する場合は、PU、外部、ネットワーク運転モードに関係なく出力遮断することができます。
注 記
Pr.178∼Pr.184 (入力端子機能選択) により端子割付の変更を行うと、他の機能に影響を与えることがあります。各端子の機
能を確認してから設定を行ってください。
注意
PMモータは磁石モータのため、モータが回転している間は、モータの端子に高電圧が発生しています。感電の原因
となりますので、モータが停止するまではモータ端子などに触れないでください。
参照パラメータ
Pr.178∼Pr.184 (入力端子機能選択) 122
120ページ参照
外部端子の機能割付と制御
4.12.3 第2機能選択信号(RT)の動作条件選択(RT信号)
RT信号によって第2機能を選択できます。
RT信号ONにて、第2機能が有効となります。
RT信号は、Pr.178∼184(入力端子機能選択)に“3”を設定し機能を割り付けてください。
第2機能の用途として、下記のようなものがあります。
(a)常用と非常用の切換え
(b)重負荷と軽負荷の切換え
(c)折れ線加減速による加減速時間の変更
第2機能の結線例
第2加減速時間の例
ドライブ
ユニット
回
転
速
度
STF(STR)
始動
RT
第2機能選択
高速
RH
中速
RM
加速時間を反映
時間
SD
RT
RH
RM
RT信号がONのときは、下記の第2機能が同時に選択されます。
機能
第1機能
第2機能
パラメータ番号
パラメータ番号
加速時間
Pr.7
Pr.44
減速時間
Pr.8
Pr.44、Pr.45
Pr.22
Pr.48
トルク制限
参照ページ
108
108
95
注 記
Pr.178∼Pr.184 (入力端子機能選択) により端子割付の変更を行うと、他の機能に影響を与えることがあります。各端子の機
能を確認してから設定を行ってください。
参照パラメータ
Pr.178∼Pr.184 (入力端子機能選択) 120ページ参照
4
パ
ラ
メ
|
タ
123
外部端子の機能割付と制御
4.12.4 始動信号動作選択(STF、STR、STOP信号、Pr.250)
始動信号(STF/STR)の動作選択ができます。
始動信号をOFFしたときの停止方法(減速停止、フリーラン)を選択します。
始動信号OFFとともに、機械ブレーキでモータを停止させる場合などに使用します。
(停止選択については、119ページ を参照してください)
内 容
パラメータ
名 称
番号
初期値
設定範囲
0∼100s
停止選択
始動信号をOFFし、設定時
STR信号:逆転始動
間後フリーラン停止。
STR信号:正逆信号
9999
9999
8888
(119ページ参照)
STF信号:正転始動
STF信号:始動信号
1000s∼1100s
250
停止動作
始動信号(STF/STR)
1000s∼1100s設定時は、
(Pr.250 −1000)s後にフ
リーラン停止。
STF信号:正転始動
STR信号:逆転始動
始動信号をOFFすると減速
STF信号:始動信号
停止。
STR信号:正逆信号
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
(1)
2ワイヤ式(STF、STR信号)
下図に2ワイヤ式の接続を示します。
初期設定で正逆転信号(STF/STR)は、始動、停止信号を兼ねています。どちらか一方のみONした方が有効で始動しま
す。運転中に両方をOFF(または、両方をON)した場合、ドライブユニットは減速停止します。
速度設定信号は、速度設定入力端子2-5間にDC0∼10Vを入力する方法やPr.4∼Pr.6 3速設定(高速、中速、低速)による
方法などがあります。
(3速運転については100ページ を参照ください。)
Pr.250 =“1000∼1100、8888”に設定すると、STF信号が始動指令、STR信号が正逆指令になります。
正転始動
STF
逆転始動
STR
ドライブユニット
始動信号
STF
正逆信号
STR
SD
SD
10
10
2
2
5
5
時間
逆転
回転速度
回転速度
正転
ドライブユニット
正転
時間
逆転
ON
STF
STF
ON
STR
2ワイヤ式接続例(Pr.250 =“9999”)
STR
ON
ON
2ワイヤ式接続例(Pr.250 =“8888”)
備 考
Pr.250 =“0∼100、1000∼1100”に設定すると、始動指令をOFFした場合、フリーラン停止します。(119ページ参照)
STF、STR信号は、初期設定で端子STF、STRに割り付けられています。STF信号は、Pr.178 STF端子機能選択 、STR信号
は、Pr.179 STR端子機能選択 のみに割付け可能です。
124
外部端子の機能割付と制御
(2)
3ワイヤ式(STF、STR、STOP信号)
下図に3ワイヤ式の接続を示します。
始動自己保持機能はSTOP信号をONすると有効になります。この場合、正逆転信号は始動信号としてのみ機能します。
始動信号(STFまたは、STR)をON→OFFしても、始動信号は保持され始動します。回転方向を変える場合はSTR(STF)
をいったんON後OFFします。
ドライブユニットの停止は、STOP信号をいったんOFFすることにより減速停止します。
STOP信号を使用する場合は、Pr.178∼Pr.184 に“25”を設定し、機能を割り付けてください。
停止
停止
正転始動
STF
逆転始動
始動
STF
ドライブユニット
STR
ドライブユニット
STOP
STOP
STR
正転/逆転
SD
SD
時間
逆転
回転速度
回転速度
正転
正転
時間
逆転
ON
ON
STF
ON
STF
ON
STR
ON
STR
STOP ON
STOP ON
OFF
OFF
OFF
3ワイヤ式接続例(Pr.250 =“9999”)
OFF
3ワイヤ式接続例(Pr.250 =“8888”)
備 考
JOG信号をONしてJOG運転を有効とした場合、STOP信号は無効になります。
MRS信号をONして出力停止した場合でも、自己保持機能は解除されません。
注 記
位置制御時、3ワイヤ式は無効です。
4
(3)
始動信号選択
パ
ラ
メ
|
タ
Pr.250 設定値 ドライブユニット状態
0∼100s、9999
1000s∼1100s、8888
STF
STR
OFF
OFF
停止
OFF
ON
逆転
ON
OFF
正転
正転
ON
ON
停止
逆転
停止
参照パラメータ
Pr.4∼Pr.6 (多段速設定) 100ページ参照
Pr.178∼Pr.184 (入力端子機能選択) 120ページ参照
125
外部端子の機能割付と制御
4.12.5 出力端子機能選択(Pr.190∼Pr.192)
オープンコレクタ出力端子およびリレー出力端子の機能を変更することができます。
パラメータ
名 称
番号
190
RUN端子機能選択
191
FU端子機能選択
192
ABC端子機能選択
初期値
オープン
コレクタ
出力端子
リレー
出力端子
初期信号
0
RUN(ドライブユニット運転中)
4
FU(回転速度検出)
99
ALM(異常出力)
設定範囲
0、1、3、4、7、8、11∼16、21、24、
26、33、36、38、47、55、56、60、61、
63、64、90、91、93、95、96、98、
99、100、101、103、104、107、
108、111∼116、121、124、126、
133、136、138、147、155、156、
160、161、163、164、190、191、
193、195、196、198、199、9999
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
“93”、
“193”は、Pr.190、Pr.191 のみ設定可能です。
(1)
出力信号一覧
出力端子の機能を設定できます。
下表を参照して、各パラメータを設定してください。(0∼ 99:正論理、100∼199:負論理)
設定値
正論理
0
負論理
100
信号名
RUN
機 能
ドライブユニット運転中
動 作
関連
参照
パラメータ
ページ
128
始動信号をONしてドライブユニットが運
転を開始すると出力します。
速度制御 ドライブユニットが減速停止してゼロ速
制御またはサーボロックが動作すると
OFFします。
位置制御 RY2信号と同じ動作をします。
速度制御 回転速度が設定速度に到達すると出力します。
1
101
SU
速度到達
3
103
OL
過負荷警報
トルク制限機能動作中に出力します。
4
104
FU
7
107
8
Pr.41、Pr.870
130
P r. 22、P r .48 、
Pr.156、Pr.157
95
回転速度検出
回転速度がPr.42 (逆転時Pr.43 )に設定された速度以 P r. 42、P r.43、
上になると出力されます。
Pr.870
130
RBP
回生ブレーキ
プリアラーム
Pr.70 で設定した回生ブレーキ使用率の85%に達す
ると出力します。
Pr.70
118
108
THP
電子サーマル
プリアラーム
電子サーマル積算値がトリップレベルの85%に達す
ると出力します。(100%に達すると電子サーマル保
護(E.THT/E.THM)が動作します。)
Pr.9
113
11
111
RY
ドライブユニット運転準
備完了
ドライブユニットの電源を投入し、リセット処理完
了後(始動信号ONにて始動可能な状態のとき、およ
び運転中)出力します。
12
112
Y12
出力電流検出
出力電流がPr.150 設定値より高い状態がPr.151 設定
Pr.150、Pr.151
時間以上継続すると出力します。
131
13
113
Y13
ゼロ電流検出
出力電流がPr.152 設定値より低い状態がPr.153 設定
Pr.152、Pr.153
時間以上継続すると出力します。
131
14
114
FDN
PID下限リミット
15
115
FUP
PID上限リミット
位置制御
速度制御
PID制御の下限リミットを下回った場合出力
します。
位置制御
速度制御
位置制御
16
116
RL
21
121
MBR
24
124
LP
ストロークリミット警報
26
126
FIN
フィン過熱プリアラーム
126
PID正転逆転出力
──
PID制御の上限リミットを上回った場合出力
Pr.127∼Pr.134
します。
128
211
速度制御 PID制御で正転時出力します。
位置制御
Pr.736
117
LSP信号またはLSN信号がOFF(常時閉入力の場合)
のとき、ストロークリミット警報信号(LP信号)を
出力します。
Pr.464、Pr.535
86
冷却フィンの温度がフィン過熱保護動作温度の約85
%になると出力します。
──
247
電磁ブレーキインタロック 電磁ブレーキを開放するために出力します。
外部端子の機能割付と制御
設定値
正論理
負論理
33
133
信号名
RY2
機 能
動 作
運転準備完了2
予備励磁時、運転中に出力します。
136
Y36
位置決め完了信号
位置制御
溜りパルス数が、Pr.426 位置決め完了幅
の設定値より少なくなると出力します。
速度制御
38
138
MEND
47
147
PID
55
155
CPO
56
156
ZA
位置決め完了信号(Y36)がONかつ位置指
位置制御 令作成中信号(PBSY信号)がOFFのときに
出力します。
移動完了信号
PID制御動作中
PID制御中に出力します。
粗一致信号
原点復帰異常
速度制御
位置制御
指令残距離が、Pr.507 粗一致出力範囲 よ
り小さくなったときに出力します。
速度制御
Pr.10、Pr.11
115、
128
Pr.426、Pr.506、
Pr.507、Pr.510、
Pr.511、Pr.530
93
Pr.127∼Pr.134
211
Pr.426、Pr.506、
Pr.507、Pr.510、
Pr.511、Pr.530
93
位置制御 原点復帰異常時に出力します。
速度制御
位置検出信号
現在位置が、Pr.510 位置検出下位4桁 +
位置制御 Pr.511 位置検出上位4桁 を超えると出力
します。
速度制御
60
160
FP
61
161
PBSY
63
163
ZP
原点復帰完了信号
64
164
Y64
リトライ中
リトライ中処理に出力します。
Pr.65∼Pr.69
143
Pr.255∼Pr.259
220
──
129
位置指令作成中信号
位置制御 位置指令作成中に出力します。
速度制御
位置制御 原点復帰が完了すると出力します。
90
190
Y90
寿命警報
制御回路コンデンサ、主回路コンデンサ、突入電流
抑制回路のいずれかの寿命が近づくと出力します。
91
191
Y91
異常出力3
(電源遮断信号)
ドライブユニットの回路故障や結線異常によるエ
ラー発生時に出力します
93
193
Y93
電流平均値モニタ信号
電流平均値とメンテナンスタイマ値をパルス出力し
ます。
Pr.192 ABC端子機能選択 には設定できません。
Pr.555∼Pr.557
224
95
195
Y95
メンテナンスタイマ信号
Pr.503 がPr.504 の設定値以上となると出力します。
Pr.503、Pr.504
223
96
196
REM
リモート出力
パラメータに値を設定することで端子出力します。
Pr.495、Pr.496
133
98
198
LF
軽故障出力
軽故障(通信エラー警報)時に出力します。
Pr.121
182
ALM
異常出力
ドライブユニットの保護機能が動作し、出力を停止
したとき(重故障時)出力します。
リセットON時に信号の出力を停止します。
──
機能なし
99
199
9999
参照
ページ
速度制御
36
関連
パラメータ
速度設定をアナログ信号または操作パネルの
──
──
129
──
──
で変化させたとき、その変化速度と加減速時間の設定による変化速度のタイミングにより、SU(速度
到達)信号の出力がON、OFFをくり返すことがありますので注意してください。
(加減速時間の設定値を「0s」としたときはこのようなくり返しはありません。)
4
備 考
端子機能の重複設定も可能です。
設定値“0∼99”のときは機能動作で導通、
“100∼199”時は不導通となります。
注 記
Pr.190∼Pr.192 (出力端子機能選択) により端子割付の変更を行うと、他の機能に影響を与えることがあります。各端子の機
能を確認してから設定を行ってください。
頻繁にON/OFFを繰り返す信号を端子A、B、Cに割り付けないでください。リレー接点の寿命が短くなります。
127
パ
ラ
メ
|
タ
外部端子の機能割付と制御
(2)
ドライブユニット運転準備完了信号(RY、RY2信号)とドライブユニット運転中信号(RUN信号)
電源
STF
RH
回
転
速
度
ゼロ速制御または
サーボロック動作
リセット
処理
初期磁極検出
(約100ms)
時間
RY
RY2
RUN
ドライブユニットが運転可能状態のとき、運転準備完了信号(RY) の出力をONします。(ドライブユニット運転中もONし
ます。)
ドライブユニット回転速度が1r/min以上になると、ドライブユニット運転中信号(RUN)の出力をONします。
ドライブユニット停止中、ゼロ速制御またはサーボロック動作中は、出力がOFFになります。
RY2信号は、予備励磁開始時にONします。
ドライブユニット停止時も予備励磁が動作している間はONします。出力遮断中(MRS信号)はOFFします。(115ページ参
照)
RY、RY2、RUN信号を使用する場合は、下表を参考にしてPr.190∼Pr.192(出力端子機能選択) に機能を割り付けてください。
Pr.190∼Pr.192 設定値
出力信号
正論理
負論理
11
111
RY
RY2
RUN
ドライブ
ユニット
状態
33
133
0
100
停止中
運転中
LX信号ON
ゼロ速制御動作中
(予備励磁)
(予備励磁)
出力遮断中*2
出力信号
RY
ON
ON
ON
ON
OFF
RY2
OFF
ON*1
ON*1
ON
OFF
RUN
OFF
ON
OFF
OFF
OFF
*1 ON時100msの遅れがあります。
*2 アラーム発生中またはMRS信号-ON、SON信号-OFFなど
備 考
RUN信号(正論理)は、初期設定で端子RUN に割り付けられています。
PMモータ制御は、電磁ブレーキインタロックと磁極位置検出のため、始動指令(STF、STR)をONしてから、RUN信号が出
力されるまでPr.736 電磁ブレーキインタロック時間 +約100msの遅れが発生します。(117ページ参照)
128
外部端子の機能割付と制御
(3)
異常出力信号(ALM信号)
ドライブユニットがアラーム停止した場合に ALM 信号を出力し
ドライブユニット異常発生
(出力遮断)
ます。
回転速度
時間
ALM
ON OFF
ON OFF
リセット処理
(約1s)
RES
リセットON
備 考
ALM信号は、初期設定でABC接点に割り付けられています。Pr.190 ∼ Pr.192 (出力端子機能選択) に“99 (正論理)または、
199 (負論理)”を設定することで、他の端子にALM信号を割り付けることも可能です。
。
ドライブユニットアラーム内容の詳細は、242ページ を参照してください。
(4)
異常出力3(電源遮断信号)(Y91信号)
ドライブユニットの回路故障に起因するアラームや結線の異常によるアラーム発生時にY91信号を出力します。
Y91信号を使用する場合は、Pr.190∼Pr.192 (出力端子機能選択) に“91(正論理)または、191(負論理)”を設定し、出力
端子に機能を割り付けてください。
下表にY91信号を出力するアラームを示します。(アラーム内容については241ページ を参照してください。)
操作パネル表示
/
/
名称
E. BE
ブレーキトランジスタ異常検出
E.GF
出力側地絡過電流
E.LF
出力欠相
E.PE
パラメータ記憶素子異常
E.PE2
内部基板異常
E. 6/
E. 7/
E.CPU
CPUエラー
E.IOH
突入電流抑制回路異常
/
備 考
出力側地絡過電流(E.GF)発生時に加速中過電流遮断(E.OC1)が表示されることがあります。このときY91信号を出力します。
4
パ
ラ
メ
|
タ
129
外部端子の機能割付と制御
4.12.6 回転速度の検出(SU、FU信号、Pr.41∼Pr.43、Pr.870)
回転速度を検出して、出力信号に出力します。
パラメータ
名 称
番号
41
42
初期値
速度到達動作幅
速度検出
43
内 容
10%
0∼100%
180r/min
0∼4800r/min
FU信号がONする速度
0∼4800r/min
逆転時にFU信号がONする速度
逆転時速度検出
870
設定範囲
9999
速度検出ヒステリシス
SU信号がONするレベル
Pr.42 設定値と同一
9999
15r/min
0∼180r/min
検出速度に対するヒステリシス幅を設定します。
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
3000r/min を超えた値を設定しても、回転速度は3000r/minで制限されます。
(1)
設定速度
回転速度が設定速度に到達したときに速度到達信号(SU)を
調整範囲 Pr.41
出力します。
設定速度を100%として、Pr.41 に0%∼100%の範囲で調
回
転
速
度
(r/min)
SU
回転速度到達動作幅(SU信号、Pr.41 )
整できます。
設定速度に到達したことを確認し、関連機器の動作開始信
号などに使用できます。
時間
OFF
SU信号を使用する場合は、Pr.190∼Pr.192 (出力端子機能
選択) に“1(正論理)または、101(負論理)”を設定し、出
OFF
ON
力端子に機能を割り付けてください
(2)
回
転
速
度
正転
回転速度がPr.42 設定値以上となったとき、回転速度検出
信号(FU)を出力します。
Pr.42
時間
Pr.43 に検出速度を設定すると、逆転専用の速度検出も設
定することができます。
Pr.43
逆転
(r/min)
出力信号 OFF
FU
ON
OFF
回転速度検出(FU信号、Pr.42、Pr.43 )
Pr.43 ≠“9999”のときは、正転時がPr.42 設定値、逆転
時がPr.43 設定値となります。
OFF
ON
回転速度
(3)
速度検出ヒステリシス(Pr.870 )
速度検出信号のチャタリングを防止します。
Pr.42
Pr.870
(r/min)
FU
OFF
OFF
ON
回転速度が変動すると、回転速度到達信号(SU)や回転速度
検出信号(FU)がON/OFFを繰り返す(チャタリングする)場
合があります。このとき、検出速度にヒステリシスを設け
ることで、信号のチャタリングを防止することができます。
ON
ON
回転速度検出信号(FU)の例
備 考
設定を大きくすると回転速度検出信号(SU、FU)の応答
は、悪くなります。
備 考
FU信号は、初期設定で端子FUに割り付けられています。Pr.190∼Pr.192 に“4(正論理)または、104(負論理)”を設定する
ことで、他の端子に機能を割り付けることもできます。
各信号ともにゼロ速制御中は、OFFになります。
位置制御時、SU信号は無効です。
注 記
Pr.190∼Pr.192 (出力端子機能選択) により端子割付の変更を行うと、他の機能に影響を与えることがあります。各端子の機
能を確認してから設定を行ってください。
参照パラメータ
Pr.190∼Pr.192 (出力端子機能選択) 130
126ページ参照
外部端子の機能割付と制御
4.12.7 出力電流の検出機能(Y12信号、Y13信号、Pr.150∼Pr.153)
ドライブユニット運転中の出力電流を検出し、出力端子に出力することができます。
パラメータ
名 称
番号
150
出力電流検出レベル
初期値
設定範囲
150%
0∼200%
内 容
100%はドライブユニット定格電流
出力電流検出時間
151
出力電流検出信号遅延時間
0s
0∼10s
152
ゼロ電流検出レベル
5%
0∼200%
153
ゼロ電流検出時間
0.5s
0∼1s
出力電流が設定値以上となってから、出力電流
検出信号(Y12)を出力するまでの時間
ドライブユニット定格電流を100%
出力電流がPr.152 の設定値以下になってからゼ
ロ電流検出信号(Y13)を出力するまでの時間
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
(1)
出力電流検出(Y12信号、Pr.150、Pr.151 )
出力電流検出機能は、過トルク検出などに利用できます。
ドライブユニット運転中に出力が Pr.150 の設定値より高い
Pr.150
出
力
電
流
状態が、Pr.151 に設定した時間以上継続すると、ドライブ
ユニットのオープンコレクタ、またはリレー出力端子より
出力電流検出信号(Y12)を出力します。
Pr.151
時間
Y12信号はPr.190∼Pr.192 (出力端子機能選択) に“12(正
論理)または、112(負論理)”を設定し、出力端子に機能を
100ms
OFF
出力電流検出信号
(Y12)
OFF
ON
Y12信号がONした場合、約100msの間ON状態を保持しま
す。
割り付けてください。
(2)
ドライブユニット運転中に出力が Pr.152 の設定値より低い
出
力
電
流
状態が、Pr.153 の設定した時間以上継続すると、ドライブ
ユニットのオープンコレクタ、またはリレー出力端子より
ゼロ電流検出(Y13)信号を出力します。
ドライブユニットの出力電流が“0”になると、トルクが発
Pr.152
時間
生しないため、ドライブユニット昇降用途に用いている場合
など、重力によりずり下がり現象が発生することがあります。
ON
これを防止するために出力電流が“0”になったとき、機械
ブレーキを閉じるように、ドライブユニットからY13信号を
出力することができます。
Pr.152
0[A]
始動信号
ゼロ電流検出(Y13信号、Pr.152、Pr.153 )
100ms*
OFF
ON
OFF
ゼロ電流検出
信号(Y13)
ON
Pr.153検出時間
OFF
Pr.153検出時間
ゼロ電流検出信号 (Y13) は、いったん ON すると、
約100msの間信号を保持します。
Y13信号はPr.190∼Pr.192 (出力端子機能選択) に“13(正
論理)または、113(負論理)”を設定し、出力端子に機能を
割り付けてください。
備 考
Y12、Y13信号の応答時間は約0.1sです。ただし、応答時間は負荷状態によって変わります。
Pr.152 =“0”設定時は、検出無効となります。
注 記
Pr.190∼Pr.192 (出力端子機能選択) により端子割付の変更を行うと、他の機能に影響を与えることがあります。各端子の機
能を確認してから設定を行ってください。
131
4
パ
ラ
メ
|
タ
外部端子の機能割付と制御
注意
ゼロ電流検出レベルを小さくしすぎたり、ゼロ電流検出時間を長くしすぎないでください。出力電流が小さく、トル
クが発生していないとき検出信号出力が出力されないことがあります。
ゼロ電流検出信号を使用しても、機械、装置が危険な状態にならないよう、非常ブレーキなどの安全バックアップ装
置を設けてください。
参照パラメータ
Pr.190∼Pr.192 (出力端子機能選択) 132
126ページ参照
外部端子の機能割付と制御
4.12.8 リモート出力機能(REM信号、Pr.495、Pr.496)
シーケンサのリモート出力端子のかわりにドライブユニットの出力信号のON/OFFを利用することができます。
パラメータ
名 称
番号
495
初期値
リモート出力選択
496
設定範囲
0
リモート出力内容1
0
内 容
0
電源OFF時リモート出力内容クリア
ドライブユニットリセット中、
1
電源OFF時リモート出力内容保持
リモート出力内容クリア
10
電源OFF時リモート出力内容クリア
ドライブユニットリセット中、
11
電源OFF時リモート出力内容保持
リモート出力内容保持
0∼4095
下図参照
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
Pr.77 パラメータ書込選択 を“0”(初期値)にしてあっても運転中、運転モードに関係なく設定値を変更することができます。
Pr.496 の設定により出力端子をON/OFFすることがで
きます。PUコネクタでの計算機リンク通信や通信オプ
<リモート出力内容>
Pr.496
b11
b0
RUN
FU
ABC
任意
ションでの通信にて、リモート出力端子のON/OFF制御
をすることができます。
Pr.190∼Pr.192 (出力端子機能選択) に“96(正論理)ま
たは、196(負論理)”を設定し、リモート出力に使用す
る端子にリモート出力(REM)信号を割り付けてくださ
い。
左図を参照し、Pr.496 の端子ビット(REM信号を割り付
けた端子)に1をセットすると、出力端子がON(負論理時
はOFF)します。また、0をセットすることにより、出力
端子がOFF(負論理時はON)します。
例)Pr.190 RUN端子機能選択 =“96(正論理)”とし、Pr.496 に“1”(H01)を設定すると、端子RUNがONします。
正論理の動作例
Pr.495=0、10
Pr.495=1、11
OFF
電源
電源
OFF
REM
OFF
ON
REM
REM信号クリア
ドライブユニット
リセット時間
(約1s)
リセット時の信号状態
REM
Pr.495=10、11
ON
リセット
ON
OFF
ON/OFF状態は、Pr.190∼Pr.192 の設定に従います。)
また、Pr.496 の設定値も“0”となります。
Pr.495 =“1、11”の場合、電源OFF前のリモート出力
内容をEEPROMに記憶するので、復電時に電源OFF前
と同じ信号出力となります。(左図参照)ただし、ドライ
REM信号保持
Pr.495=0、1
Pr.495 =“0(初期値)、10”の場合、電源リセットする
と(停電含む)、REM信号出力はクリアされます。(端子の
リセット
ON
ブユニットリセット(端子リセット、通信からのリセッ
ト要求)時は記憶されません。
REM
ON
Pr.495 =“10、11”の場合、ドライブユニットリセッ
ト中でもリセット前の信号を保持します。
*
* Pr.495=“1”の場合、EEPROMに記憶されている信号状態
(前回電源OFF時の設定)になります。
備 考
Pr.190∼Pr.192 にてREM信号が割り付けられていない出力端子は、Pr.496 の端子ビットに0/1をセットしても、出力端子は、
ON/OFFしません。(割り付けられた機能でON/OFFします。)
参照パラメータ
Pr.190∼Pr.192 (出力端子機能選択) 126ページ参照
133
4
パ
ラ
メ
|
タ
モニタ表示とモニタ出力信号
4.13 モニタ表示とモニタ出力信号
目的
設定が必要なパラメータ
モータ回転速度を表示させる
回転数で設定する
回転速度表示と回転数設定
DU/PUメイン表示データ選択
積算モニタのクリア
端子FMから出力するモニタを変更する 端子FM機能選択
端子FMから出力するモニタの基準を設定する 端子FMの基準設定
端子FMの出力を調整する
端子FM校正
PUのモニタ表示内容を変更する
参照ページ
134
Pr.37、Pr.144
Pr.52、Pr.54、Pr.170、Pr.171、
Pr.268、Pr.563、Pr.564
Pr.54
Pr.55、Pr.56
Pr.900
135
135
140
141
4.13.1 回転速度表示と回転数設定(Pr.37、Pr.144)
操作パネルおよびPU(FR-PU07)のモニタ表示やモータ回転速度を周波数設定や機械速度に変更することができます。
パラメータ
番号
名 称
初期値
設定範囲
内 容
0
回転速度表示、設定
0.01∼9998
3000r/minの機械速度
2、4、6、8、10、102、
110
周波数表示にする場合モータ極数を設定
回転速度設定切換
144
104、106、108、110
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
37
0
回転速度表示
設定範囲の上限はPr.1 上限設定 の設定値により変わり、以下の算出式により算出できます。
Pr.37 設定上限値 <
16777.215 3000r/min
Pr.1 設定値(r/min)
ただし、上記算出式の算出結果が9998を超える場合、Pr.37 の設定上限値は9998となります。
機械速度を表示する場合は、3000r/minで運転時の機械速度をPr.37 に設定し、Pr.144 にモータ極数(2、4、6、8、10)
を設定します。
例えば、Pr.37 = “1000”と設定した場合、回転速度が3000r/minのときの機械速度モニタは、
“1000”と表示します。
運転速度が1500r/minのときは、
“500”と表示します。
Pr.144 にモータ極数+100(102、104、106、108、110)が設定されている場合は、モータ回転速度を表示します。(Pr.37
= “0”の場合)
周波数表示に変更する場合は、Pr.144 にモータ極数(10)を設定します。(Pr.37 =“0”の場合)
各モニタ、設定単位は、下表のようにPr.37 とPr.144 の組み合わせによって決まります。(太枠内が初期値です。)
Pr.37
Pr.144
設定値
設定値
0( 初期値 )
0.01∼9998
2∼10
102∼110(初期値)
2∼10
102∼110
出力周波数
モニタ
設定周波数
モニタ
周波数設定
パラメータ設定
0.01Hz
0.01Hz
0.01Hz
0.01Hz
1r/min *
1r/min *
1r/min *
1r/min *
0.001(機械速度 *)
0.001(機械速度 *)
0.001(機械速度 *)
0.01Hz
0.01Hz
0.01Hz
0.01Hz
0.01Hz
モータ回転速度r/min換算式 ............................... 周波数×120/モータ極数(Pr.144)
機械速度換算式 ..................................................... Pr.37 ×回転速度/3000r/min
上式のPr.144 は、Pr.144 =102∼110の場合は“Pr.144 − 100”となります。
注 記
PU主モニタ(PUメイン表示)を変えたい場合は、Pr.52 を参照してください。
操作パネルのパネル表示は4桁のため、モニタ値が“9999”を越える場合“----”となります。
FR-PU07で機械速度表示にしている時、設定速度が65535を超えた値を表示している状態で上下キーを押して、速度変更を
しないでください。設定速度が不定値になることがあります。
機械速度表示にするとモニタ表示や速度設定は機械速度になりますが、速度に関するパラメータ(Pr.1 など)は周波数の単位
になります。他の速度に関するパラメータ(Pr.1 など)は周波数の単位で設定してください。
設定周波数の分解能の制約により小数点2桁目の表示が設定値と異なる場合が発生します。
注意
運転速度の設定は確実に行ってください。
モータがオーバスピードとなり、機械を破損する恐れがあります。
参照パラメータ
Pr.1 上限設定 98ページ参照
Pr.52 DU/PUメイン表示データ選択 134
135ページ参照
モニタ表示とモニタ出力信号
4.13.2 DU/PU、端子FMのモニタ表示選択
(Pr.52、Pr.54、Pr.170、Pr.171、Pr.268、Pr.430、Pr.563、Pr.564)
操作パネルおよびパラメータユニット(FR-PU07)メイン画面に表示するモニタを選択できます。
また、端子FM(パルス列出力)に出力する信号を選択できます。
パラメータ
番号
名 称
初期値
DU/PUメイン表示データ選択
(回転速度
0
52
54
FM端子機能選択
設定範囲
0、5、8∼12、14、19、 操作パネルとパラメータユニットに表示
20、23∼31、36、37、 するモニタの選択
(出力周波数))
52∼55、61、62、100
1
1∼3、5、8∼12、14、
(回転速度
(出力周波数))
積算電力計クリア
9999
モニタ内容は下表参照
21、24、36、37、52、 端子FMに出力するモニタの選択
53、61、62
0
170
内 容
10
9999
積算電力計モニタをクリアする場合、
“0”を設定
通信からモニタする場合の上限値を0∼
9999kWhとする
通信からモニタする場合の上限値を0∼
65535kWhとする
稼働時間モニタをクリアする場合、
“0”
171
稼動時間計クリア
9999
0、9999
を設定
9999を設定してもクリアしない
268
モニタ小数桁選択
9999
0
整数値で表示
1
0.1単位で表示
9999
430
位置モニタ選択
9999
溜りパルス【電子ギア後】の下位(4桁)を表示
5
溜りパルス【電子ギア後】の上位(4桁)を表示
100
位置指令【電子ギア前】の下位(4桁)を表示
101
位置指令【電子ギア前】の上位(4桁)を表示
102
現在位置【電子ギア前】の下位(4桁)を表示
103
現在位置【電子ギア前】の上位(4桁)を表示
104
溜りパルス【電子ギア前】の下位(4桁)を表示
105
溜りパルス【電子ギア前】の上位(4桁)を表示
9999
563
564
通電時間繰越し回数
稼動時間繰越し回数
0
0
機能なし
4
回転速度(出力周波数)モニタを表示
(0∼65535)
通電時間モニタが65535hを越えた回数
(読出しのみ)
を表示(読出しのみ)
(0∼65535)
稼働時間モニタが65535hを越えた回数
(読出しのみ)
を表示(読出しのみ)
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
Pr.77 パラメータ書込選択 を“0”(初期値)にしてあっても運転中、運転モードに関係なく設定値を変更することができます。
4
パ
ラ
メ
|
タ
135
モニタ表示とモニタ出力信号
モニタ内容一覧(Pr.52)
(1)
操作パネル、パラメータユニット(FR-PU07)に表示するモニタをPr.52 DU/PUメイン表示データ選択 に設定します。
端子FM(パルス列出力)に出力するモニタをPr.54 FM端子機能選択 に設定します。
下表を参照して表示するモニタを設定してください。(×印の部分のモニタは選択できません。)
モニタの種類
回転速度
(出力周波数)
単位
Pr.52 設定値
操作パネル
PU
主モニタ
LED
1r/min
(0.01Hz)
Pr.54 (FM)
設定値
端子FM
フルスケール値
0/100
1
Pr.55
回転速度(ドライブユニット出力周波数)
を表示
ドライブユニット出力電流実効値を表示
出力電流
0.01A
0/100
2
Pr.56
出力電圧
0.1V
0/100
3
400V
異常表示
──
0/100
×
速度設定(周波数設定値)
コンバータ出力電圧
1r/min
(0.01Hz)
0.1V
内 容
ドライブユニット出力電圧を表示
──
5
5
Pr.55
8
8
400V
過去8回の異常履歴を個別に表示
設定されている速度(周波数)を表示
直流母線電圧値を表示
Pr.30、Pr.70 で設定されたブレーキ使用
回生ブレーキ使用率
0.1%
9
9
Pr.70
電子サーマル負荷率
0.1%
10
10
100%
サーマル動作レベルを100%としてサーマ
ル積算値(モータサーマル、トランジスタ
サーマル積算値の大きい方)を表示
出力電流ピーク値
0.01A
11
11
Pr.56
出力電流モニタのピーク値を保持し表示
(始動ごとにクリアします)
0.1V
12
12
400V
直流母線電圧値のピーク値を保持し表示
(始動ごとにクリアします)
0.01kW
14
14
ドライブユニット
ドライブユニット出力側の電力を表示
の定格電力×2
入力端子状態
──
──
×
──
入力端子ON/OFF状態をPUに表示
(DU表示は138ページ参照 )
出力端子状態
──
──
×
──
出力端子ON/OFF状態をPUに表示
(DU表示は138ページ参照 )
位置パルス
──
×
──
モータ1回転内の位置を表示。モータ1回
転で5120。
コンバータ出力電圧
ピーク値
出力電力
積算通電時間
基準電圧出力
実稼動時間 ,
モータ負荷率
19
率
1h
20
×
──
ドライブユニット出荷後の通電時間を積
算表示
モニタ値が65535hを越えた回数を
Pr.563 で確認できます。
──
──
21
──
端子FM:
1440パルス/sを出力
──
ドライブユニットが運転している時間を
積算表示
モニタ値が65535hを越えた回数を
Pr.564 で確認できます。
Pr.171 でクリア可能(139ページ参照)
1h
23
×
モータ定格トルクを100%としてトルクを
%表示
モニタ値=トルク/モータ定格トルク×
100[%]
0.1%
24
24
0.01kWh
25
×
──
1
26
×
──
位置指令【電子ギア前】
10000
(上位4桁)
27
×
──
現在位置【電子ギア前】
(下位4桁)
28
×
──
現在位置【電子ギア前】
10000
(上位4桁)
29
×
──
溜りパルス【電子ギア前】
(下位4桁)
30
×
──
31
×
──
積算電力
位置指令【電子ギア前】
(下位4桁)
1
1
溜りパルス【電子ギア前】
10000
(上位4桁)
136
200%
出力電力モニタを元に電力量を積算表示
Pr.170 でクリア可能(138ページ参照)
位置指令【電子ギア前】=位置指令【電
子ギア前】(上位4桁)×10000+位置指令
【電子ギア前】(下位4桁)
符号無し(常に正の値として表示)
現在位置【電子ギア前】=現在位置【電
子ギア前】(上位4桁)×10000+現在位置
【電子ギア前】(下位4桁)
符号無し(常に正の値として表示)
溜りパルス【電子ギア後】=溜りパルス
【電子ギア後】(上位4桁)×10000+溜り
パルス【電子ギア後】(下位4桁)
符号無し(常に正の値として表示)
モニタ表示とモニタ出力信号
モニタの種類
単位
Pr.52 設定値
操作パネル
PU
主モニタ
LED
1r/min
理想速度指令
(0.01Hz)
1r/min
速度指令
(0.01Hz)
Pr.54 (FM)
設定値
端子FM
フルスケール値
内 容
36
36
Pr.55
位置指令を作成するための理想的な速度
指令を表示
37
37
Pr.55
位置ループ後の速度指令を表示
PID目標値
0.1%
52
52
100%
PID測定値
0.1%
53
53
100%
PID偏差
0.1%
54
×
──
ドライブユニット入出
力端子モニタ
──
×
──
モータサーマル負荷率
0.1%
61
61
モータサーマルの熱積算値を表示
サーマル動作レ
(100%でモータ過負荷遮断(E.THM)とな
ベル(100%)
る)
ドライブユニットサー
マル負荷率
0.1%
62
62
トランジスタサーマルの熱積算値を表示
サーマル動作レ
(100%でドライブユニット過負荷遮断
ベル(100%)
(E.THT)となる)
PID制御時の目標値、測定値、偏差を表示
(詳細は215ページ参照 )
ドライブユニット本体の入力端子、出力
55
×
端子のON/OFF状態を操作パネルに表示
(詳細は138ページ参照 )
Pr.144 回転速度設定切換 の設定値が102以上の場合は速度表示となり、2∼10の場合は周波数表示となります。
PU主モニタの速度設定値∼出力端子状態はパラメータユニット(FR-PU07)の「その他のモニタ選択」で選択します。
積算通電時間、実稼動時間は0∼65535hまで積算し、その後はクリアされ、再度0から積算されます。
操作パネル使用時は、1h=0.001の表示として65.53(65530h)まで表示し、その後は0からの積算となります。
実稼動時間は、電源OFFまでの累積運転時間が1h未満の場合、積算されません。
パラメータユニット(FR-PU07)の場合、“kW”と表示されます。
操作パネルのパネル表示は4桁のため、モニタ値が“9999”を超える場合“----”となります。
サーマルはモータサーマル、トランジスタサーマルのうち大きい方を表示します。
停止中でも周囲温度(フィン温度)が高い場合に0%以外の値が表示されることがあります。
パラメータユニット(FR-PU07)の場合、上位5桁、下位5桁での表示となります。
10000を1単位として表示します。
備 考
Pr.52 =“0”と設定すると回転速度(出力周波数)∼異常表示を順次
でモニタ選択できます。
操作パネル使用時の単位表示は、Hz、Aのみでその他は表示しません。
Pr.52 で設定したモニタは、第三モニタ(出力電圧モニタ)の位置に表示します。ただし、モータ負荷率は、出力電流モニタを
変更します。
初期値
※電源投入時に表示されるモニタが第一モニタです。第一モニタにしたいモニタを表示して
転速度(出力周波数)モニタに戻す場合は、(回転速度(出力周波数)モニタを表示させてから
●電源投入時モニタ(第一モニタ)
●第二モニタ
を1s押し続けてください。(回
を1s押してください。)
●第三モニタ
●アラームモニタ
アラーム有
回転速度(出力周波数)
モニタ
出力電流モニタ
4
出力電圧モニタ
パ
ラ
メ
|
タ
例)Pr.52 =“20”(積算通電時間)にした場合、下記のように操作パネルにモニタが表示されます。
●電源投入時モニタ(第一モニタ)
●第二モニタ
●第三モニタ
●アラームモニタ
アラーム有
回転速度(出力周波数)
モニタ
出力電流モニタ
積算通電時間モニタ
137
モニタ表示とモニタ出力信号
停止中は設定速度(周波数)を表示する(Pr.52)
(2)
Pr.52 =“100”と設定すると停止中に設定速度
(周波数)、運転中に回転速度(出力周波数)のモニ
タ表示ができます。(周波数モニタ時、停止中は
HzのLEDが点滅し、運転中は点灯します。)
Pr.52
0
運転中/停止中
停止中
100
運転中
回転速度
回転速度
設定速度
回転速度
(出力周波数)
(出力周波数)
(設定周波数)
(出力周波数)
出力電流
出力電流
出力電圧
出力電圧
異常表示
異常表示
設定速度(周波数)は、始動指令ON時に出力する速度(周波数)を表示します。Pr.52 =“5”設定時に表示する速度(周波数)設定値とは異なり、上限/下限設
定、速度ジャンプを考慮した値を表示します。
備 考
エラー中はエラー発生時の回転速度(出力周波数)の表示となります。
MRS信号による出力遮断中は停止中と同等の扱いになります。
操作パネルの入出力端子モニタ(Pr.52)
(3)
Pr.52 =“55”とすると、操作パネルでドライブユニットの入出力端子状態をモニタすることができます。
入出力端子モニタは、第三モニタに表示されます。
端子がONしている場合、LEDが点灯し、OFFしている場合は消灯します。中央のLEDは、常に点灯します。
本体入出力端子モニタ(Pr.52 =“55”)は、LEDの上部が入力端子、下部が出力端子の状態を示します。
RM
空き
RH
空き
RL
空き
MRS
RES STF
空き 空き
入力端子
STR
─ 表示例 ─
端子STF、RH、RUNが
ONしている場合
Hz
A
V
中央のラインは常時点灯
ABC
RUN
空き
空き
空き
空き
FU
空き
空き
空き
空き
出力端子
空き
積算電力モニタとクリア(Pr.170)
(4)
積算電力モニタ(Pr.52
=“25”)は、出力電力モニタ値を積算し、100ms単位でモニタ値を更新します。(1hごとに
EEPROMに記憶します。)
操作パネル、パラメータユニット(FR-PU07)、通信(RS-485通信、通信オプション)表示単位と表示範囲は、下記のよ
うになります。
操作パネル
パラメータユニット
範 囲
単 位
範 囲
単 位
0∼99.99kWh
0.01kWh
0∼999.99kWh
0.01kWh
100.0∼999.9kWh
0.1kWh
1000.0∼9999.9kWh
0.1kWh
1000∼9999kWh
1kWh
10000∼99999kWh
1kWh
通信
範囲
Pr.170 =10
Pr.170 =9999
0∼9999kWh
0∼65535kWh
(初期値)
0∼9999.99kWhの計測で、4桁表示となります。
モニタ値が“99.99”を超えると、“100.0”というように桁が繰り上がるので、0.1kWh単位の表示となります。
0∼99999.99kWhの計測で、5桁表示となります。
モニタ値が“999.99”を超えると、
“1000.0”というように桁が繰り上がるので、0.1kWh単位の表示となります。
Pr.170 に“0”を書き込むことで、積算電力モニタをクリアすることができます。
備 考
Pr.170 は、
“0”を書き込み、再度Pr.170 を読み出しても“9999”または、“10”の表示となります。
138
単位
1kWh
モニタ表示とモニタ出力信号
(5)
積算通電時間と実稼働時間モニタ(Pr.171、Pr.563、Pr.564)
積算通電時間モニタ(Pr.52 =“20”)は、ドライブユニットが出荷されてから通電された時間を1hごとに積算します。
実稼動時間モニタ(Pr.52 =“23”)は、ドライブユニットが運転中の時間を1hごとに積算します。(停止中は、積算し
ません。)
モニタ値が65535を越えた場合、0からの積算となります。積算通電時間モニタが65535hを越えた回数をPr.563 で、
実稼動時間モニタが65535hを越えた回数をPr.564 でそれぞれ確認することができます。
Pr.171 に“0”を書き込むことで、実稼動時間モニタをクリアすることができます。(通電時間モニタのクリアはでき
ません。)
備 考
積算通電時間は、1h未満で電源OFFした場合、積算されません。
実稼動時間は、電源OFFまでの累積運転時間が1h未満の場合、積算されません。
“9999”を設定しても、
Pr.171 は、“0”を書き込み、再度Pr.171 を読み出しても常に“9999”の表示となります。また、
実稼働時間計のクリアはしません。
(6)
モニタの小数桁を選択できます(Pr.268)
操作パネルは4桁表示のため、アナログ入力時などに、小数点以下がパラつくことがあります。小数桁の選択により、小
数点以下を隠すことができます。
こうした場合、Pr.268 により小数桁を選択できます。
Pr.268 設定値
9999(初期値)
0
1
内 容
機能なし
小数点以下が1桁または2桁(0.1単位または0.01単位)のモニタは0.1の桁以降を切り捨て、モニタ表示を整数
値(1単位)とする。 0.99以下のモニタ値は、0と表示する。
小数点以下2桁(0.01単位)のモニタは0.01の桁を切り捨て、モニタ表示を小数点以下1桁(0.1単位)とする。モ
ニタ表示桁がもともと1単位のものは、1単位のまま表示。
備 考
積算通電時間(Pr.52 =“20”)、実稼動時間(Pr.52 =“23”)、積算電力(Pr.52 =“25”)の表示桁数は変化しません。
(7)
位置モニタ選択(Pr.430)
Pr.430 で設定したモニタは、第一モニタ(回転速度モニタ)の位置に表示します。
符号無しで(常に正の値として)表示します。
パラメータユニット(FR-PU07)の場合、上位5桁、下位5桁での表示となります。
RS-485通信、CC-Link通信にて回転速度モニタの読出し設定で、位置モニタを行うことができます。
参照パラメータ
Pr.30 回生機能選択、Pr.70 特殊回生ブレーキ使用率 118ページ参照
Pr.37 回転速度表示 134ページ参照
Pr.55 速度モニタ基準、Pr.56 電流モニタ基準 140ページ参照
4
パ
ラ
メ
|
タ
139
モニタ表示とモニタ出力信号
4.13.3 端子FM(パルス列出力)の基準について(Pr.55、Pr.56)
モニタ出力にはパルス列出力の端子FMがあります。
端子FMに出力する信号の基準値を設定します。
パラメータ
名 称
番号
55
速度モニタ基準
56
初期値
設定範囲
3000r/min
0∼4800r/min
モータ
電流モニタ基準
0∼500A
定格電流
内 容
回転速度モニタ値を端子FMに出力する場合のフ
ルスケール値
出力電流モニタ値を端子FMに出力する場合のフ
ルスケール値
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
Pr.77 パラメータ書込選択 を“0”(初期値)にしてあっても運転中、運転モードに関係なく設定値を変更することができます。
3000r/min を超えた値を設定しても、回転速度は3000r/minで制限されます。
モータ定格電流は、271 ページ を参照してください。
(1)
速度モニタの基準(Pr.55)
速度モニタを端子FMに出力する場合のフルスケール値を設定します。
端子FMとSDに接続された速度測定器(1mAアナログ測定器)がフルスケールを示す時の速度を設定します。
FM出力のパルス速度が1440パルス/sのときの回転速度を設定します。
パルス速度と回転速度は比例します。(最大パルス列出力は2400パルス/sです。)
パルス速度
2400
1440
(パルス/s)
3000r/min
(初期値)
4800r/min
回転速度
Pr.55設定範囲
(2)
電流モニタの基準(Pr.56)
電流モニタを端子FMに出力する場合のフルスケール値を設定します。
FM出力のパルス速度が1440パルス/sのときの出力電流を設定します。
パルス速度と出力電流モニタ値は比例します。(最大パルス列出力は2400パルス/sです。)
パルス速度
2400
1440
(パルス/s)
定格電流
(初期値)
Pr.56設定範囲
140
500A
モニタ表示とモニタ出力信号
4.13.4 端子FM校正(校正パラメータC0(Pr.900))
操作パネルやパラメータユニットを使用して、端子FMのフルスケールを校正できます。
パラメータ
名 称
番号
C0(900)
FM端子校正
初期値
設定範囲
−
−
内 容
端子FMに接続したメータの目盛校正
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
( )内は、パラメータユニット(FR-PU07)使用時のパラメータ番号です。
Pr.77 パラメータ書込選択 を“0”(初期値)にしてあっても運転中、運転モードに関係なく設定値を変更することができます。
FM端子校正(C0(Pr.900))
(1)
端子FMの出力は、パルス出力になっており、校正パラメータC0(Pr.900) の設定により目盛校正抵抗器を設けなくても
ドライブユニットに接続したメータの目盛校正をパラメータで行うことができます。
端子FMのパルス列出力を利用して、デジタルカウンタによるデジタル表示ができます。モニタ内容一覧(136ページ)
(Pr.54 FM端子機能選択) のフルスケール値で1440パルス/s出力となります。
FM
1mA
表示計
1mAフルスケール
アナログメータ
(+)
目盛校正抵
抗器*1
(デジタル表示計)
T1
(−)
FM
1440パルス/s(+)
(−)
DC8V
SD
SD
T2
パルス幅 T1:校正パラメータC0にて調整 パルス周期T2:Pr.55にて設定(速度モニタ)
Pr.56にて設定(電流モニタ)
操作パネルまたはパラメータユニット(FR-PU07)にて校正する場合は必要ありません。
速度計が遠方にあるなどの理由で速度計の手元で校正する必要があるときに使用します。
ただし、目盛校正抵抗を接続すると速度計の針がフルスケールまで振らない場合があります。この場合は操作パネルまたはパラメータユニットによ
る校正を行ってください。
初期設定では、3000r/minのとき1mAフルスケール、端子FM速度1440パルス/sとなります。
端子FMの校正は、以下手順で実施してください。
1) 表示計(速度計)をドライブユニットの端子FM-SD間に接続します。(極性に注意してください。端子FMがプラスで
す。)
2) 目盛校正抵抗器がすでに接続されている場合は、抵抗値が「0」となるように調整するか、取り外してください。
3) モニタ内容一覧(136ページ) を参照し、Pr.54 を設定します。
モニタに運転速度またはドライブユニット出力電流等を選択した場合には、Pr.55 速度モニタ基準 またはPr.56 電
流モニタ基準 によりあらかじめ出力信号が1440パルス/sとなる運転速度または電流値を設定してください。
4
この1440パルス/sで通常はメータがフルスケールになります。
備 考
実際の負荷や測定器なしで100%の値に調整できないモニタ出力信号を校正する場合は、Pr.54 =“21”(基準電圧出力)に設
定してください。端子FMより1440パルス/sが出力されます。
端子FMの配線長は、200m以下としてください。
注 記
校正パラメータC0(Pr.900) の初期値は、3000r/minのとき1mAでフルスケール、FM出力1440パルス/sとなるように設定さ
れています。端子FMの最大パルス列出力は2400パルス/sです。
141
パ
ラ
メ
|
タ
モニタ表示とモニタ出力信号
(2)
操作パネル使用時の端子FM校正方法
操 作
表 示
(Pr.54 =1の場合)
1. 運転表示と運転モード表示の確認
2.
PRM表示が点灯します。
を押してパラメータ設定モードに
します。
(以前に読み出したパラメータの番号を
表示します)
3.
を回して
に合わせます。
4.
を押して
に合わせます。
5.
を回して
に合わせます。
C0∼C7の設定が
できるようにな
ります。
C0 FM端子校正 に合わせます。
6.
を押して設定可能にします。
7. 停止中の場合、
Pr.54 FM端子機能選択
に設定されているモニ
タが表示されます。
を押してドライブ
ユニットを運転してください。
8.
を回して表示計の針を所定の位置
アナログ表示計
に調整してください。
9.
を押してください。
Hz
A
設定完了です。
フリッカー・・・パラメータ設定完了!!
を回すと他のパラメータを読み出すことができます。
を押すと
を2回押すと次のパラメータ(
表示(操作4)に戻ります。
)を表示します。
備 考
外部運転の場合も校正することが可能です。外部運転モードにて速度を設定し上記の手順にて校正してください。
運転中でも校正することができます。
パラメータユニット(FR-PU07)での操作要領は、パラメータユニット取扱説明書を参照してください。
参照パラメータ
Pr.54 FM端子機能選択 Pr.55 速度モニタ基準 Pr.56 電流モニタ基準 142
135ページ参照
140ページ参照
140ページ参照
異常発生時の動作設定
4.14 異常発生時の動作設定
目的
設定が必要なパラメータ
アラーム発生時リトライ動作で復帰し
たい
入出力欠相アラームを出力しない
始動時の地絡を検出する
モータの過速度を検出する
リトライ動作
入出力欠相保護選択
始動時地絡検出有無
過速度検出レベル
参照ページ
Pr.65、Pr.67∼Pr.69
143
Pr.251、Pr.872
Pr.249
Pr.374
145
145
146
4.14.1 リトライ機能(Pr.65、Pr.67∼Pr.69)
アラームが発生した場合、ドライブユニット自身が自動的にリセットし、再始動する機能です。リトライの対象とな
るアラーム内容を選択することもできます。
パラメータ
名 称
番号
65
リトライ選択
初期値
設定範囲
0
0∼5
0
1∼10
67
アラーム発生時リトライ回数
0
内 容
リトライするアラームを選択。(次ページ表
参照)
リトライ動作なし
アラーム発生時のリトライ回数を設定。
リトライ動作中異常出力せず。
アラーム発生時のリトライ回数を設定。(設定
101∼110
値−100がリトライ回数)
リトライ動作中異常出力する。
68
リトライ実行待ち時間
69
1s
リトライ実行回数表示消去
0
0.1∼360s
0
アラーム発生し、リトライするまでの待ち時
間を設定。
リトライにより再始動が成功した回数をクリ
ア。
上記パラメータは、Pr.160 拡張機能表示選択=“0”のとき設定可能となります。(161ページ参照)
リトライ成功の例
リトライ動作とは、ドライブユニットがトリップしたと
リトライ成功
き、Pr.68 の設定時間を経過すると、自動的に異常リ
セットし、始動速度より再始動する機能です。
Pr.67 ≠“0”とするとリトライ動作します。Pr.67 に
Pr.68×4
Pr.68 (3.1s未満の場合は3.1s)
アラーム発生時のリトライ回数を設定します。
モータ
回転速度
Pr.67 に設定した回数以上続けてリトライが失敗した場
合、リトライ回数オーバー異常(E.RET)となり、ドライ
0
時間
成功回数+1
リトライ開始
異常発生
の待ち時間を0.1∼360sの範囲で設定できます。
リトライ成功回数
Pr.69 を読み出すことにより、リトライにより再始動に
成功した累積回数を知ることができます。
ON
Y64
ブユニットはトリップします。(リトライ失敗例参照)
Pr.68 にてドライブユニットトリップ後、リトライまで
Pr.69 の累積回数はリトライ開始からPr.68 で設定した
時間の4倍以上の時間(最短は3.1s)の間、アラーム発生
リトライ失敗の例
せず、正常に運転を継続したとき成功したと見なし、回
数を1回増します。
Pr.68
Pr.68
(リトライ成功させた場合、リトライ失敗の累積回数は
クリアされます。)
Pr.68
モータ
回転速度
0
時間
リトライ
リトライ
リトライ
1回目
2回目
3回目
リトライ失敗
(E.RET)
異常発生
異常発生
異常発生
アラーム信号
ON
(ALM)
Y64
ON
ON
Pr.69 に“0”を書き込むと、累積回数が消去されます。
リトライ中は、Y64信号がONします。Y64信号は、
Pr.190∼Pr.192 (出力端子機能選択) に“64(正動作)”
または“164(負動作)”を設定して機能を割り付けてく
ださい。
ON
143
4
パ
ラ
メ
|
タ
異常発生時の動作設定
Pr.65 によりリトライを実行するアラームを選択できます。記載のないアラームは、リトライしません。(アラーム内容に
ついては242ページ を参照してください。)
は選択されるリトライ項目を示します。
リトライする
アラーム表示
E.OC1
E.OC2
E.OC3
E.OV1
E.OV2
E.OV3
E.THM
E.THT
E. BE
E. GF
E.USB
Pr.65 設 定 値
0
1
●
2
3
4
5
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
リトライする
アラーム表示
E.OS
E.OSD
E.OA
E.OHT
E.OLT
E.OPT
E.OP1
E. PE
E.ILF
E.SOT
Pr.65 設 定 値
0
1
2
3
4
●
●
●
●
●
●
5
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
注 記
保護機能動作後、リセットして運転を再開しても問題ない場合のみ、リトライ機能を使用してください。
原因不明の保護機能に対するリトライは、ドライブユニットやモータの故障原因になります。保護機能動作の原因を特定し、
原因を取り除いたうえで運転を再開してください。
Pr.190∼Pr.192 により端子割付の変更を行うと、他の機能に影響を与えることがあります。各端子の機能を確認してから設
定を行ってください。
リトライ時のエラーは1回目に発生したアラーム内容のみ記憶します。
リトライ機能によるリトライ時のリセットの場合は、電子サーマル、回生ブレーキ使用率などの蓄積データはクリアされま
せん。(電源リセットとは異なります。)
電源投入時にE.PE(パラメータ記憶素子異常)が発生した場合、リトライ実行しません。
リトライ動作(リトライ実行待ち時間)中に、リトライ対象外のアラームが発生した場合は、リトライ動作中のアラーム表示の
ままリトライ動作を終了します。
位置制御時、リトライ機能は無効です。
注意
リトライ機能を選択した場合、ドライブユニットがトリップした時はモータ、機械に近寄らないでください。ドライ
ブユニットトリップ後に突然(所定時間経過後)始動します。
リトライ機能を選択した場合には、見やすい場所に取扱説明書(基礎編)付属の注意シールを貼り付けてください。
参照パラメータ
Pr.190∼Pr.192 (出力端子機能選択) 144
126ページ参照
異常発生時の動作設定
4.14.2 入出力欠相保護選択(Pr.251、Pr.872)
入出力欠相保護機能の有効/無効を選択することができます。
ドライブユニットの出力側(負荷側)3相(U、V、W)のうち、1相が欠相するとドライブユニット出力を停止する出力
欠相保護機能
ドライブユニットの入力側3相(R/L1、S/L2、T/L3)のうち、1相が欠相するとドライブユニット出力を停止する入
力欠相保護機能
パラメータ
名 称
番号
251
出力欠相保護選択
872
入力欠相保護選択
初期値
設定範囲
1
0
0
出力欠相保護なし
1
出力欠相保護あり
0
入力欠相保護なし
1
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
(1)
内 容
入力欠相保護あり
出力欠相保護選択(Pr.251)
ドライブユニット運転中(ゼロ速制御動作中、回転速度が12r/min以下の場合を除く)に欠相が発生すると、出力欠相保護
(E.LF)が動作し、ドライブユニットがトリップします。
Pr.251 =“0”の設定で、出力欠相保護(E.LF)が無効となります。
(2)
入力欠相保護選択(Pr.872)
Pr.872 =“1”の設定で、3相入力のうち1相の欠相を1s間連続して検出すると入力欠相保護(E.ILF)が動作します。
注 記
入力側の欠相が長時間続くと、ドライブユニットのコンバータ部やコンデンサの寿命が短くなります。
母線電圧の変動で検出する為、停止中や負荷が軽い場合は検出できません。また、3相電源の相間電圧のアンバランスが大き
い場合に入力欠相保護(E.ILF)が動作することがあります。
回生負荷時は検出できません。
4.14.3 始動時地絡検出有無(Pr.249)
始動時地絡検出の有無を選択することができます。地絡検出は、ドライブユニットに始動信号を入力した直後にのみ
実施します。
運転中に発生した地絡は、保護機能が動作しません。
パラメータ
名 称
番号
249
始動時地絡検出有無
初期値
0
設定範囲
0
1
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
内 容
地絡検出なし
地絡検出あり
4
注 記
始動時に検出を実行するため、毎回始動時に約20ms の出力遅れが生じます。(初期磁極検出による出力遅れ時間もさらに加
算されます)
Pr.249 =“1”にて地絡を検出した場合、出力側地絡過電流(E.GF)を検出し、出力を遮断します。(248ページ参照)
145
パ
ラ
メ
|
タ
異常発生時の動作設定
4.14.4 過速度検出(Pr.374)
速度が出過ぎたときに、ドライブユニット出力を遮断することができます。
パラメータ
番号
名 称
初期値
設定範囲
内 容
3450r/min
0∼4800r/min
速度以上になると過速度(E.OS)となり、
モータの回転速度がPr.374 に設定した
374
過速度検出レベル
ドライブユニットの出力を停止
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
3000r/minを超えた値を設定しても回転速度は3000r/minで制限されます。
モータ回転速度
Pr.374
フリーラン停止
時間
ON
ALM
E.OS
146
アナログ入力(端子2、4)による速度設定
4.15 アナログ入力(端子2、4)による速度設定
目的
設定が必要なパラメータ
電圧、電流入力の選択(端子2、4)アナ
ログ入力で正逆転させる
アナログ入力速度、電圧(電流)の調整(
校正)
Pr.73、Pr.267
147
Pr.125、Pr.126、Pr.241、
C2∼C7(Pr.902∼Pr.905)
152
アナログ入力選択
速度設定電圧(電流)のバイアス
とゲイン
参照ページ
4.15.1 アナログ入力選択(Pr.73、Pr.267)
アナログ入力端子の仕様、入力信号による正、逆転を切り換える機能が選択できます。
パラメータ
番号
73
名 称
初期値
アナログ入力選択
1
設定範囲
内 容
0
端子2入力0∼10V
1
端子2入力0∼5V
10
端子2入力0∼10V
11
端子2入力0∼5V
可逆運転なし
可逆運転あり
電圧/電流入力切換スイッチ
0
267
端子4入力選択
0
I
V
1
内 容
端子4入力4∼20mA
端子4入力0∼5V
I
V
2
端子4入力0∼10V
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
(1)
アナログ入力仕様の選択
アナログ電圧入力に使用する端子2は、0∼5V(初期値)、0∼10Vの選択ができます。
アナログ入力に使用する端子4は、電圧入力(0∼5V、0∼10V)、電流入力(4∼20mA 初期値)の選択ができます。
入力仕様を変更する場合、Pr.267 と電圧/電流入力切換スイッチを変更してください。
電圧/電流入力切換スイッチの設定により端子4の定格仕様が変更します。
電圧入力の場合:入力抵抗10k1k、最大許容電圧DC20V
電流入力の場合:入力抵抗2335、最大許容電流30mA
I
V
4
電流入力の場合(初期設定)
I
パ
ラ
メ
|
タ
V
制御回路端子台
電圧入力の場合
147
アナログ入力(端子2、4)による速度設定
注 記
Pr.267 と電圧/電流入力切換スイッチを正しく設定し、設定に合ったアナログ信号を入力してください。下表のような誤設定
をした場合は、故障の原因となります。その他の誤設定の場合は、正しく動作しません。
故障の原因となる設定
スイッチ設定
端子入力
I(電流入力)
電圧入力
V(電圧入力)
電流入力
動 作
外部機器のアナログ信号出力回路の故障の原因となる
(外部機器のアナログ信号出力回路の負荷が増加する)
ドライブユニットの入力回路の故障の原因となる
(外部機器のアナログ信号出力回路の出力電力が増加する)
下表を参照して、Pr.73、Pr.267 を設定してください。
(
は主速設定を示します)
Pr.73
端子4入力
端子2入力
設定値
0
1
可逆運転
AU信号
0∼10V
しない
0∼5V
(初期値)
10
11
0
1
OFF
ー
0∼10V
0∼5V
する
Pr.267 設定値による
ON
ー
(初期値)
10
11
0:4∼20mA(初期値)
しない
1:0∼5V
する
2:0∼10V
ー:無効
AU信号入力に使用する端子は、Pr.178∼Pr.184(入力端子機能選択) に“4”を設定して機能を割り付けてください。
注 記
端子4を有効にするには、AU信号-ONにしてください。
パラメータとスイッチの設定を同一にしてください。設定が異なると異常、故障、誤動作の原因になります。
最大回転速度指令電圧(電流)を入力したときの最大回転速度を変更する場合は、Pr.125(Pr.126) (速度設定ゲイン) で設定しま
す。このとき指令電圧(電流)を入力する必要はありません。
また、加減速時間は加減速基準速度までの勾配のため、Pr.73 の設定変更の影響は受けません。
Pr.178∼184 (入力端子機能選択) により端子割付の変更を行うと、他の機能に影響を与えることがあります。各端子の機能を
確認してから設定を行ってください。
正転
ドライブ
STF ユニット
速度設定
アナログ入力電圧で運転する
速度設定信号は、DC0∼5V(またはDC0∼10V)を端子2-5間に入力
します。5V(10V)入力が最大回転速度となります。
SD
DC0∼5V
(2)
電源の5Vは、内部電源を使用することも、外部電源を準備して入力
10
2
することもできます。電源の10Vは、外部電源を準備して入力して
5
ください。内部電源は、端子10-5間がDC5V出力となります。
端子
端子2(DC0∼5V)を使用した結線例
10
正転
ドライブ
STF ユニット
SD
DC0∼10V
速度設定
電圧入力
機器
2
5
内蔵電源電圧
DC5V
速度設定分解能
6r/min / 3000r/min
Pr.73
(端子2入力電圧)
DC0∼5V入力
“10”を設
端子2にDC10V入力する場合は、Pr.73 に“0”または、
定してください。(初期値は0∼5Vです)
端子4を電圧入力仕様にする場合は、Pr.267 に“1(DC0∼5V)”ま
たは、“2(DC0∼10V)”を設定し、電圧/電流入力切換スイッチを
“V”にしてください。
AU信号-ON時端子4入力が有効となります。
端子2(DC0∼10V)を使用した結線例
備 考
端子10、2、5の配線長は、30m以下としてください。
148
ドライブユニット
アナログ入力(端子2、4)による速度設定
(3)
ドライブユニット
正転
アナログ入力電流で運転する
STF
出力信号DC4∼20mAを端子4-5間に入力して運転ができます。
AU
端子4を使用する場合は、AU信号をONする必要があります。
SD
DC4∼20mA
4
電流入力
機器
速度設定
5
端子4(DC4∼20mA)を使用した結線例
(4)
逆転
設
定 Pr.125
速
度
(r/min)
正転
可逆あり
アナログ入力で正逆転する(可逆運転)
Pr.73 に“10”または、
“11”を設定し、Pr.125(Pr.126) 端子2速度
設定ゲイン速度(端子4速度設定ゲイン速度) 、C2(Pr.902) 端子2速度
設定バイアス速度 ∼C7(Pr.905) 端子4速度設定ゲイン を調整するこ
とにより、端子2(端子4)による可逆運転が有効となります。
可逆なし
C2(Pr.902)
0
端子2入力(V)
5V
2.5V
C3(Pr.902) C4(Pr.903)
速度設定信号
例)端子2(0∼5V)入力で可逆運転する場合
1) Pr.73 =“11”に設定し、可逆運転を有効にします。
Pr.125(Pr.903) にアナログ最大入力時の速度を設定します。
2) C3(Pr.902) にC4(Pr.903) 設定値の1/2の値を設定します。
3) DC0∼2.5Vが逆転、DC2.5V∼5Vが正転になります。
可逆運転例
注 記
可逆運転の設定にした場合、アナログ入力がなくなった場合(始動信号を入力しただけで)、逆転で運転するので注意してくだ
さい。
可逆運転を有効にした場合、初期状態で端子4も可逆運転(0∼4mA:逆転、4mA∼20mA:正転)となります。
位置制御時は、アナログ入力による運転はできません。
参照パラメータ
Pr.125 端子2速度設定ゲイン速度、Pr.126 端子4速度設定ゲイン速度 152ページ参照
C2(Pr.902) 端子2速度設定バイアス速度 ∼ C7(Pr.905) 端子4速度設定ゲイン 152ページ参照
4
パ
ラ
メ
|
タ
149
アナログ入力(端子2、4)による速度設定
4.15.2 速度設定をアナログで行う(電圧入力/電流入力)
ポイント
始動指令は端子STF(STR)-SDをONで行います。
速度指令はボリューム(速度設定器)(電圧入力)または4-20mA入力(電流入力)で行います。
【結線例 電圧入力】
【結線例 電流入力】
Pr.178∼Pr.184 のいずれかにAU信号を割り付
速度設定器にはドライブユニットから5Vの電
源が供給されます。(端子10)
けてください。
ドライブユニット
正転始動
逆転始動
速度
設定器
操作例
ドライブユニット
STF
STR
SD
正転始動
逆転始動
AU信号
10
2
5
STF
STR
AU信号(端子RH)
SD
調整計の出力
(DC4∼20mA)
4(+)
5(ー)
3000r/minで運転する。
操 作
表 示
1. 電源投入時画面
ON
モニタ表示になります。
2. AU信号の割り付け(電流入力の場合)
(電圧入力の場合は手順3へ)
Pr.160 を“0”に設定し、拡張パラメータを有効にします。
Pr.178∼Pr.184 のいずれかに“4”を設定し、AU信号を割り
付けます。(設定値の変更については47 ページ を参照してく
ださい。)
AU信号をONします。
3. 始動
正転
始動スイッチ(STFまたはSTR)をONします。
逆転
ON
点滅
速度指令がない状態であり、0r/minでゼロ速運転します。
[RUN]表示が正転時は点灯、逆転時はゆっくり点滅します。
4. 加速→定速
電圧入力の場合は(速度設定器)をゆっくりと右いっぱいまで
回します。
電流入力の場合は20mA入力を行ってください。
表示部の速度値がPr.7 加速時間 に従って大きくなり、
“
”(3000r/min)を表示します。
[RUN]表示が正転時は点灯、逆転時はゆっくり点滅します。
5. 減速
点滅
電圧入力の場合はボリューム(速度設定器)をゆっくりと左
いっぱいまで回します。
電流入力の場合は4mA入力を行ってください。
表示部の速度値がPr.8 減速時間 に従って小さくなり“
停止
”
(0r/min)を表示し、0r/minでゼロ速運転します。
[RUN]表示が正転時は点灯、逆転時はゆっくり点滅します。
6. 停止
始動スイッチ(STFまたはSTR)をOFFします。
[RUN]表示が消灯します。
150
正転
OFF
逆転
アナログ入力(端子2、4)による速度設定
備 考
Pr.178 STF端子機能選択 =“60”(またはPr.179 STR端子機能選択 =“61”)である必要があります。(全て初期値)
モータが回らない…なぜ?
[EXT]は点灯していますか?
[EXT]はPr.79 =“0”(初期値)、“2”の場合に有効になります。
で[EXT]を点灯させてください。
配線は確実ですか?今一度確認ください。
ボリューム最小値(0V 初期値)の速度(0r/min)を変更したい
校正パラメータC2 端子2速度設定バイアス速度 で調整してください。(152ページ参照)
4.15.3 アナログ入力の応答性やノイズ除去(Pr.74)
外部速度指令(アナログ入力(端子2、4)信号)に対して、1次遅れフィルタの時定数を設定できます。
パラメータ
番号
名 称
初期値
設定範囲
1
0∼8
内 容
アナログ入力に対する、1次遅れフィルタ
74
入力フィルタ時定数
時定数
設定値が大きいほどフィルタが大きくなる
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
速度設定回路のノイズ除去に有効です。
ノイズの影響などにより、安定した運転ができない場合は、フィルタ時定数を大きくしてください。
設定値を大きくすると応答性は低くなります。(時定数は設定値0∼8にて約5ms∼約1sの範囲で設定できます。)
4
パ
ラ
メ
|
タ
151
アナログ入力(端子2、4)による速度設定
4.15.4 速度設定電圧(電流)のバイアスとゲイン
(Pr.125、Pr.126、Pr.241、C2(Pr.902)∼C7(Pr.905))
速度設定信号(DC0∼5V、0∼10Vまたは4∼20mA)に対する回転速度の大きさ(傾き)を任意に設定することができま
す。
端子4によるDC0∼5V、0∼10V、0∼20mAの切換えはPr.267 および電圧/電流入力切換スイッチの設定で行います。
(147ページ参照)
【速度設定バイアス/ゲインパラメータ】
パラメータ
番号
125
126
241、
C2(902)
、
C3(902)
、
C4(903)
、
C5(904)
、
C6(904)
、
C7(905)
、
名 称
初期値
設定範囲
3000r/min
0∼4800r/min
端子2入力ゲイン(最大)の速度
3000r/min
0∼4800r/min
0
0
1
端子4入力ゲイン(最大)の速度
%表示
アナログ入力表示の単位
V/mA表示
0r/min
0∼4800r/min
0%
0∼300%
端子2入力のバイアス側電圧の%換算値
端子2速度設定ゲイン
100%
0∼300%
端子2入力のゲイン側電圧の%換算値
端子4速度設定バイアス速度
0r/min
0∼4800r/min
20%
0∼300%
端子4入力のバイアス側電流(電圧)の%換算値
100%
0∼300%
端子4入力のゲイン側電流(電圧)の%換算値
端子2速度設定ゲイン速度
端子4速度設定ゲイン速度
アナログ入力表示単位切替
端子2速度設定バイアス速度
端子2速度設定バイアス
端子4速度設定バイアス
端子4速度設定ゲイン
内 容
端子2入力のバイアス側の速度
端子4入力のバイアス側の速度
Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
( )内は、パラメータユニット(FR-PU07)使用時のパラメータ番号です。
Pr.77 パラメータ書込選択 を“0”(初期値)にしてあっても運転中、運転モードに関係なく設定値を変更することができます。
3000r/min を超えた値を設定しても、回転速度は3000r/minで制限されます。
152
アナログ入力(端子2、4)による速度設定
(1)
最大アナログ入力時の速度を変更する。
(Pr.125、Pr.126)
初期値
3000r/min
最大アナログ入力電圧(電流)の速度設定(ゲイ
回
転
速
度
(r/min)
ン)のみ変更する場合は、Pr.125(Pr.126) に設
定します。(C2(Pr.902)∼C7(Pr.905) の設定を
変更する必要はありません)
ゲイン
Pr.125
バイアス
C2(Pr.902)
(2)
(C2(Pr.902)∼C7(Pr.905))
100%
5V
10V
C4(Pr.903)
0
0
速度設定信号
0
C3(Pr.902)
アナログ入力バイアス・ゲインの校正
回転速度を設定するために外部より入力され
るDC0∼5V/0∼10Vまたは、DC4∼20mA
などの設定入力信号と回転速度の関係を調整
するのが、「バイアス」・「ゲイン」機能です。
端子2入力のバイアス速度をC2 (Pr.902) で設
定します。
(初期値は0V時の速度)
Pr.73 アナログ入力選択 にて設定された速度
指令電圧に対する回転速度をPr.125 で設定し
初期値
ます。
端子4入力のバイアス速度をC5 (Pr.904) で設
3000r/min
回
転
速
度
(r/min)
定します。
(初期値は4mA時の速度)
ゲイン
Pr.126
バイアス
C5(Pr.904)
20
0
0
4
C6(Pr.904)
100%
20mA
C7(Pr.905)
速度設定信号
速度指令電流(4∼20mA)の20mAに対する回
転速度をPr.126 で設定します。
速度設定電圧(電流)バイアス・ゲインの調整方
法は3つあります。
(a)端子2-5(4-5)間に電圧(電流)を印加して
任意の点を調整する方法。
154ページ
(b)端子2-5(4-5)間に電圧(電流)を印加しな
いで任意の点を調整する方法。
155ペー
ジ
(c)電圧(電流)を調整せず、速度のみ調整する
方法。
156ページ
注 記
Pr.267 および電圧/電流入力切換スイッチによって端子4の電圧/電流入力信号を切り換えた場合、必ず校正を実施してくだ
さい。
(3)
アナログ入力表示単位の切換え(Pr.241)
4
アナログ入力バイアス・ゲイン校正時のアナログ入力表示単位(%/V/mA)を切り換えることができます。
Pr.73 、Pr.267 および電圧/電流入力切換スイッチに設定された端子入力仕様によって、下記のようにC3(Pr.902)、
C4(Pr.903)、C6(Pr.904)、C7(Pr.905) の表示単位が変わります。
アナログ指令(端子2、4)
(Pr.73、Pr.267、電圧/電流入力
切換スイッチによる)
0∼5V入力
0∼10V入力
0∼20mA入力
Pr.241 =“0(初期値)”
0∼5V → 0∼100%(0.1%)表示
0∼10V → 0∼100%(0.1%)表示
0∼20mA → 0∼100%(0.1%)表示
Pr.241 =“1”
0∼100% → 0∼5V(0.01V)表示
0∼100% → 0∼10V(0.01V)表示
0∼100% → 0∼20mA(0.01mA)表示
153
パ
ラ
メ
|
タ
アナログ入力(端子2、4)による速度設定
(4)
速度設定電圧(電流)バイアス・ゲインの調整方法
操作パネルで速度設定電圧(電流)バイアス・ゲインの調整をする場合は、下記の手順にて調整してください。パラメー
タの詳細については、152 ページ を参照してください。
(a)端子2-5(4-5)間に電圧(電流)を印加して任意の点を調整する方法。
操 作
表 示
1. 運転表示と運転モード表示の確認
停止中であること。
PU運転モードであること。
(
による)
2.
PRM表示が点灯します。
を押してパラメータ設定モードに
します。
(以前に読み出したパラメータの番号を
表示します)
3.
を回して
に合わせます。
4.
を押して
に合わせます。
5.
を回して
(
C0∼C7の設定が
できるようにな
ります。
)に
合わせます。
端子2入力の場合
C4 端子2速度設定ゲイン に合わせます。
6.
を押すとアナログ電圧(電流)値
Hz
A
(%)を表示します。
7. 5V(20mA)の電圧(電流)を印加します。
Hz
A
(端子2-5間(端子4-5間)に接続した外部
ボリュームを最大(任意の位置)にしま
端子4入力の場合
端子2-5間(端子4-5間)の
アナログ電圧(電流)値(%)
ボリュームが最大時、100(%)付近の値となります。
す。)
注 記
操作6を実行後は、校正完了まで
8.
は触らないでください。
を押して設定します。
端子2入力の場合
端子4入力の場合
Hz
A
フリッカー・・・パラメータ設定完了!!
ボリュームが最大時、100(%)付近の値となります。
を回すと他のパラメータを読み出すことができます。
を押すと
を2回押すと次のパラメータ(
表示(操作4)に戻ります。
)を表示します。
備 考
端子FM-SD間に接続した速度計(表示計)が3000r/minピッタリを指さない場合は、校正パラメータC0 FM端子校正 を設定し
てください。(141ページ参照)
ゲインとバイアス速度設定電圧(電流)の設定値が近すぎると書込み時エラー (
154
)が出ることがあります。
アナログ入力(端子2、4)による速度設定
(b)端子2-5(4-5)間に電圧(電流)を印加しないで任意の点を調整する方法。
(4V(80%)から5V(100%)にする場合)
操 作
表 示
1. 運転表示と運転モード表示の確認
停止中であること。
PU運転モードであること。
(
2.
による)
PRM表示が点灯します。
を押してパラメータ設定モードに
します。
(以前に読み出したパラメータの番号を
表示します)
3.
を回して
に合わせます。
4.
を押して
に合わせます。
5.
を回して
(
C0∼C7の設定が
できるようにな
ります。
)に
合わせます。
端子2入力の場合
C4 端子2速度設定ゲイン に合わせます。
6.
を押すとアナログ電圧(電流)値
Hz
A
(%)を表示します。
7.
を回してゲイン電圧(%)を設定し
Hz
A
ます。
“0V(0mA)が0%、10V(5V、20mA)が
100%”
端子4入力の場合
端子2-5間(端子4-5間)の
アナログ電圧(電流)値(%)
端子2-5間(端子4-5間)の
アナログ電圧(電流)値が
100%のときが
ゲイン速度になります。
備 考
を回した瞬間現在の設定値を表示します。
Hz
A
操作7実行後は確認できません。
8.
端子2入力の場合
を押して設定します。
端子4入力の場合
Hz
A
フリッカー・・・パラメータ設定完了!!
(調整完了)
を回すと他のパラメータを読み出すことができます。
を押すと
を2回押すと次のパラメータ(
4
表示(操作4)に戻ります。
パ
ラ
メ
|
タ
)を表示します。
備 考
操作6の後で
を押すと現在の速度設定バイアス/ゲイン設定を確認することができます。
操作7実行後は確認できません。
155
アナログ入力(端子2、4)による速度設定
(c)ゲイン電圧(電流)を調整せず、速度のみ調整する方法。
(ゲイン速度を3000r/minから1500r/minにする場合)
操 作
1.
を回して
表 示
(Pr.125) または
または
端子2入力の場合
(Pr.126) に合わせます。
2.
で現在設定されている値が表示さ
Hz
A
れます。(3000r/min)
3.
を回して設定値を“
”に
Hz
A
変更します。(1500r/min)
4.
端子4入力の場合
端子2入力の場合
で設定します。
端子4入力の場合
フリッカー・・・パラメータ設定完了!!
5. モード・モニタ確認
を2回押してモニタ・速度モニタ
にしてください。
6. ドライブユニットの端子2-5間(4-5間)
に電圧を印加して始動指令(STF、STR)
をONしてください。
1500r/minで運転を開始します。
備 考
C4(Pr.903)、C7(Pr.905)(ゲイン調整)を変更しても、Pr.20 は変化しません。
パラメータユニット(FR-PU07)での操作要領はFR-PU07の取扱説明書を参照してください。
バイアス速度設定は校正パラメータC2(Pr.902)またはC5(Pr.904) によって設定してください。(153ページ参照)
注意
0V(0mA)時のバイアス速度を「0」以外の値を設定する場合には注意してください。速度指令がなくても、始動信号を
ONするだけでモータが設定速度で始動します。
参照パラメータ
Pr.20 加減速基準速度 108ページ参照
Pr.73 アナログ入力選択、Pr.267 端子4入力選択 Pr.79 運転モード選択 165ページ参照
156
147ページ参照
誤操作防止とパラメータ設定の制限
4.16 誤操作防止とパラメータ設定の制限
目的
設定が必要なパラメータ
リセット機能に制限を設ける
PUが抜けたらアラーム停止
PUで停止させる
パラメータの書換え防止
モータの逆転防止
必要なパラメータを表示させる
パスワードによるパラメータの制限
通信によるパラメータの書込み制御
参照ページ
リセット選択/PU抜け検出
/PU停止選択
Pr.75
157
パラメータ書込み禁止選択
逆転防止選択
応用パラメータの表示
パスワード機能
EEPROM書込有無選択
Pr.77
Pr.78
Pr.160
Pr.296、Pr.297
Pr.342
160
161
161
162
186
4.16.1 リセット選択/PU抜け検出/PU停止選択(Pr.75)
リセット入力受付け選択、PU(FR-PU07)のコネクタ抜け検出機能の選択、PUでの停止機能の選択ができます。
パラメータ
名 称
番号
75
リセット選択/PU抜け検出/
PU停止選択
初期値
設定範囲
14
0∼3、 14∼17
内 容
初期値は、常時リセット可、PU抜け検
出なし、PU停止機能あり。
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
Pr.75 の設定は常時設定可能です。また、設定値は、パラメータ(オール)クリアを実行しても初期値には戻りません。
Pr.75
リセット選択
設定値
0
常時リセット入力可
1
保護機能動作時のみリセット入力可
2
常時リセット入力可
3
保護機能動作時のみリセット入力可
14
(初期値)
(1)
常時リセット入力可
15
保護機能動作時のみリセット入力可
16
常時リセット入力可
17
保護機能動作時のみリセット入力可
PU抜け検出
PUが抜けてもそのまま運転を継続
PU停止選択
PU運転モードのみ
を入力すると
PU抜け時にドライブユニット出力遮断
減速停止。
PUが抜けてもそのまま運転を継続
PU・外部・通信のいずれの運転モード
でも
入力にて減速停止。
PU抜け時にドライブユニット出力遮断
リセット選択
リセット機能(RES信号、通信によるリセット指令)入力の動作タイミングを選択できます。
Pr.75 =“1、3、15、17”に設定すると、保護機能動作時のみリセットの入力が可能となります。
注 記
運転中にリセット入力(RES)をすると、リセット中のドライブユニットは、出力を遮断するため、モータはフリーランとなり
ます。
4
リセットした場合、電子サーマル、回生ブレーキ使用率の積算値がクリアされます。
PUのリセットキーは、Pr.75 の設定によらず、保護機能動作時のみ入力可能です。
(2)
PU抜け検出
PU(FR-PU07)が、ドライブユニット本体から1s以上抜けたことを検出すると、ドライブユニットが異常出力(E.PUE)
し、アラーム停止とする機能です。
Pr.75 =“0、1、14、15”に設定すると、PUが抜けてもそのまま運転継続します。
備 考
電源投入前からPUが抜けていたときは、アラームとはしません。
再度始動する場合は、PUの接続を確認した後、リセットしてください。
Pr.75 =“0、1、14、15”(PUが抜けてもそのまま運転を継続)に設定した状態で、PU JOG運転中にPUが抜けたときは、減
速停止します。
PUコネクタにより、RS-485通信運転をする場合、リセット選択、PU停止選択機能は有効ですが、PU抜け検出機能は無効と
なります。
157
パ
ラ
メ
|
タ
誤操作防止とパラメータ設定の制限
(3)
PU停止選択
PU 運転、外部運転、ネットワーク運転モードのいずれの運転モードでも操作パネルまたは、パラメータユニット (FRPU07)のSTOPキーで、非常停止させることができます。
PU停止により停止した場合は、PUに“
”(PS)を表示します。異常出力は行いません。
PU停止後、再始動させるためには、PU停止(PS)解除操作が必要になります。PS解除は、PU停止をしたユニット(操作
パネル、パラメータユニット(FR-PU07)から可能となります。
電源リセットやRES信号によるリセットを行うことで、PS解除し、再始動させることもできます。
Pr.75 =“0∼3”に設定すると、PU停止(PS表示)は無効となり、PU運転モード時のみ、
による通常の減速停止が
有効となります。
備 考
PU運転モードでPUコネクタからのRS-485通信で運転中、操作パネルから
(4)
外部運転時にPUから
入力した場合も減速停止(PU停止)します。
入力で停止させた場合の再始動方法(PU停止(PS)解除方法)
(a)操作パネルの場合
速度
①減速停止完了後、STFまたはSTR信号をOFFにします。
時間
キー
操作パネル
STF
(STR)
②
を押し、
③
を押し
表示にします。・・・・・・(
解除)
に戻します。
キー
ON
OFF
④STFまたはSTR信号をONします。
外部運転の場合の停止、再始動例
(b)パラメータユニット(FR-PU07)の場合
①減速停止完了後、STFまたはSTR信号をOFFにします。
②
を押します。・・・・・・(
解除)
③STFまたはSTR信号をONします。
電源リセットやRES信号によるリセットを行うことで、再始動させることもできます。
備 考
Pr.250 停止選択 ≠“9999”と設定し、フリーラン停止を選択してある場合でも、外部運転中のPU停止機能ではフリーラン
停止せず、減速停止します。
(5)
PU運転時にPU停止(PS表示)させた場合の再始動(PS解除)方法
PU運転モードで操作指令権がないユニット(操作パネル、パラメータユニット(FR-PU07)から停止させた場合、PU停
止(PS表示)します。
例えば、Pr.551 PUモード操作権選択 =“9999”(初期値)の場合、パラメータユニットを装着した状態でPU運転して
いる状態で、操作パネルより
入力した場合、PU停止(PS表示)します。
パラメータユニット(FR-PU07)に操作指令権がある時に、操作パネルでPU停止をした場合
①減速停止完了後、パラメータユニット(FR-PU07)の
②操作パネルの
を押し、
を押します。
表示にします。・・・・・・(
解除)
③パラメータユニット(FR-PU07)の
を押してPU運転モードにします。
④パラメータユニット(FR-PU07)の
または
を押します。
備 考
Pr.551 =“9999”の時、PU指令権の優先順位は、USBコネクタ>パラメータユニット(FR-PU07)> 操作パネル となります。
158
誤操作防止とパラメータ設定の制限
注意
始動信号が入力されたままリセットをしないでください。
解除後、瞬時に始動し危険です。
参照パラメータ
Pr.250 停止選択 119ページ参照
Pr.551 PUモード操作権選択 173ページ参照
4
パ
ラ
メ
|
タ
159
誤操作防止とパラメータ設定の制限
4.16.2 パラメータ書込禁止選択(Pr.77)
各種パラメータの書込みの可否が選択でき、誤操作によるパラメータの書換え防止などに使用します。
パラメータ
名 称
番号
77
初期値
パラメータ書込選択
0
設定範囲
内 容
0
停止中のみ書込み可能。
1
パラメータの書込み不可。
2
全ての運転モードで運転状態にかかわらず
書込み可能。
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
Pr.77 の設定は、運転モード、運転状態に関係なく常時可能です。
停止中のみパラメータを書き込む(設定値“0”初期値)
(1)
PU運転モードで停止中のみパラメータの書込みができます。
パラメータ一覧表(48ページ) の
で示すパラメータは、運転モード、運転状態に関わりなく、常時書込み可能です。
パラメータの書込みを禁止する(設定値“1”)
(2)
パラメータの書込みはできません。
パラメータ番号
名 称
(読出しは可能です。)
パラメータクリア、パラメータオールクリアもできません。
22
トルク制限動作レベル
75
リセット選択/PU抜け検出/PU停止選択
右記パラメータは、Pr.77 =“1”の場合でも書込み可能です。
77
パラメータ書込選択
79
運転モード選択
160
拡張機能表示選択
296
パスワード保護選択
297
パスワード登録/解除
運転中もパラメータを書き込む(設定値“2”)
(3)
常時パラメータの書込みができます。
下記パラメータは、Pr.77 =“2”の場合でも運転中の書込みはできません。パラメータ設定値を変更する場合、運転を
停止してください。
パラメータ
名 称
番号
40
RUNキー回転方向選択
48
第2トルク制限動作レベル
79
運転モード選択
178∼184
(入力端子機能選択)
190∼192
(出力端子機能選択)
参照パラメータ
Pr.79 運転モード選択 160
165ページ参照
誤操作防止とパラメータ設定の制限
4.16.3 逆転防止選択(Pr.78)
始動信号の誤入力による逆運転のトラブルを防止できます。
パラメータ
名 称
番号
78
初期値
逆転防止選択
設定範囲
0
内 容
0
正転・逆転共可
1
逆転不可
2
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
正転不可
モータの回転方向を一方向のみに限定したい場合に設定します。
操作パネル、パラメータユニット(FR-PU07)の逆転、正転キー、外部端子による始動信号(STF信号、STR信号)、通信か
らの正逆転指令の全てに対して有効です。
4.16.4 拡張パラメータの表示(Pr.160)
操作パネルやパラメータユニットで読出しできるパラメータを制限できます。
パラメータ
名 称
番号
160
初期値
拡張機能表示選択
0
設定範囲
9999
0
内 容
シンプルモードパラメータのみ表示。
シンプルモード+拡張パラメータを表示。
Pr.77 パラメータ書込選択 を“0”(初期値)にしてあっても運転中、運転モードに関係なく設定値を変更することができます。
(1)
シンプルモードパラメータと拡張パラメータの表示(Pr.160)
Pr.160 =“9999”の場合、シンプルモードパラメータのみ操作パネルやパラメータユニット(FR-PU07)で表示するこ
とができます。(シンプルモードパラメータは、パラメータ一覧48ページ 参照)
初期値(Pr.160 =“0”)では、シンプルモードパラメータと拡張パラメータの表示が可能です。
備 考
通信オプションを使用してパラメータの読出しをする場合は、Pr.160 の設定に関係なく全てのパラメータが読出し可能です。
RS-485通信を使用してパラメータ読出しをする場
合は、Pr.550 NETモード操作権選択、Pr.551 PU
モード操作権選択 の設定により、Pr.160 の設定に
関係なく、全てのパラメータが読出し可能です。
Pr.551
Pr.550
2(PU)
-
有効
0(OP)
有効
2(PU)
無効(全て読出し可)
OPあり:有効
3(USB)
9999
(自動判別 初期値)
9999
(自動判別 初期値)
Pr.160有効/無効
OPなし:無効
(全て読出し可)
OPは通信オプションを示します。
Pr.15 JOG速度設定、Pr.16 JOG加減速時間、Pr.991 PUコントラスト調整 は、パラメータユニット(FR-PU07)装着時は、シ
ンプルモードパラメータとして表示します。
4
パ
ラ
メ
|
タ
161
誤操作防止とパラメータ設定の制限
4.16.5 パスワード機能(Pr.296、Pr.297)
4桁のパスワードを登録することによりパラメータの読出し/書込みを制限することができます。
パラメータ
名 称
番号
296
パスワード保護選択
初期値
設定範囲
内 容
0∼6、
パスワード登録時のパラメータ読出し/書込み制限
9999
100∼106
レベルを選択
9999
パスワード保護なし
1000∼9998
297
パスワード登録/解除
4桁のパスワードを登録
パスワード解除ミスの回数を表示(読出しのみ)
(0∼5)
9999
(Pr.296 =“100∼106”設定時有効)
9999
パスワード保護なし
Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。
Pr.296 =“9999”(パスワード保護なし)の場合、Pr.160 =“0”のとき設定可能となります。パスワード保護ありの場合は、Pr.160 の設定に関係な
Pr.297 に“0、9999”は、書込み可能ですが、Pr.297 の設定値は、変わりません。
く常に設定可能です。
パラメータ読出し/書込み制限レベル(Pr.296 )
(1)
Pr.296 によりPU/NETモード操作指令による読出し/書込みの制限を選択できます。
Pr.296 設定値
PUモード操作指令
読出し
書込み
NETモード操作指令
RS-485通信
書込み
読出し
通信オプション
書込み
読出し
9999
0、100
○
○
○
○
○
○
×
×
×
×
×
×
1、101
○
×
○
×
○
×
2、102
○
×
○
○
○
○
3、103
○
○
○
×
○
×
4、104
×
×
×
×
○
×
5、105
×
×
○
○
○
○
6、106
○
○
×
×
○
×
○:可、×:不可
Pr.160 の設定により読出しの制約があるパラメータは“○”であっても、読出しできません。
Pr.77 の設定により書込みの制約があるパラメータは“○”であっても、書込みできません。
PU運転モードでパラメータ書込み可能な操作場所(初期設定では操作パネル、パラメータユニット)からのパラメータアクセスを制限します。(PUモー
ド操作権選択については173ページ参照 )
ネットワーク運転モードでパラメータ書込み可能な操作場所(初期設定ではPUコネクタからのRS-485通信、通信オプション)からのパラメータアクセ
スを制限します。(NETモード操作権選択については173ページ参照 )
162
通信オプションを装着した場合、オプション異常(E.OPT)が発生し、インバータはトリップします。(248ページ参照)
誤操作防止とパラメータ設定の制限
(2)
パスワードの登録/解除(Pr.296、Pr.297 )
<登録>
1) パラメータ読出し/書込み制限レベルを設定します。(Pr.296 ≠9999)
Pr.296 設定値
パスワード解除ミス制限
0∼6
無制限
Pr.297 表示
常に0を表示
100∼106
5回失敗した時点で制限
失敗回数を表示(0∼5)
Pr.296 に“100∼106”のいずれかを設定してパスワード解除ミスを5回行った場合、それ以降は正しいパスワードを入力しても解除され
ません。パラメータオールクリアで解除することができます。(この場合パラメータは初期値となります。)
2) Pr.297 にパスワードとして登録する4桁の数字(1000∼9998)を書き込みます。
(Pr.296 =“9999”の時は書込みできません)
パスワードを登録すると、解除するまでPr.296 にて設定した制限レベルでパラメータの読出し/書込みが制限され
ます。
備 考
パスワードを登録後は、Pr.297 の読出し値は常に“0∼5”のいずれかとなります。
パスワードにより制限されたパラメータを読出し/書込みした場合、
が表示されます。
パスワード登録中でも、ドライブユニット部品の寿命などドライブユニット自身で書込みされるパラメータは随時書き換わり
ます。
パスワード登録中でも、パラメータユニット(FR-PU07)を接続した場合は、Pr.991 PUコントラスト調整 は読出し/書込み可
能です。
<解除>
パスワード解除の方法は2つです。
Pr.297 にパスワードを書き込む。
パスワードが一致したら解除されます。パスワードが一致しなかった場合、エラーとなり解除されません。
Pr.296 に“100∼106”のいずれかを設定してパスワード解除ミスを5回行った場合、それ以降は正しいパスワードを入
力しても解除されません。(パスワードロック中)
パラメータオールクリアを行う。
注 記
パスワードを忘れた場合、パラメータオールクリアでパスワードが解除されますが、他のパラメータもクリアされます。
パラメータオールクリアは運転中はできません。
備 考
操作パネル/FR-PU07、RS-485通信、通信オプションのそれぞれで、パスワードの解除方法が異なります。
操作パネル/
FR-PU07
パラメータオールクリア
パラメータクリア
RS-485通信
通信オプション
○
○
○
×
×
○
○…パスワード解除可能、×…パスワード解除不可
パラメータユニット(FR-PU07)のパラメータクリア、パラメータオールクリア方法については、各オプションの取扱説明
書を参照してください。(操作パネルは 234 ページ 、RS-485通信の三菱インバータプロトコルは 187 ページ 、Modbus-
4
RTU通信プロトコルは199 ページ を参照)
パ
ラ
メ
|
タ
163
誤操作防止とパラメータ設定の制限
(3)
パスワード登録/解除中のパラメータ操作について
Pr.296 =9999
Pr.297 =9999
パスワード解除中
Pr.296 ≠9999
Pr.297 =9999
パスワード登録中
Pr.296 ≠9999
パスワードロック中
Pr.296 =100∼106
Pr.297 =0∼4(読出し値)
Pr.297 =5(読出し値)
読出し
○
○
○
○
書込み
○
○
×
×
読出し
○
○
○
○
操作
Pr.296
Pr.297
書込み
パラメータ
クリア実行
パラメータオー
ルクリア実行
パラメータ
コピー実行
×
○
○
○
○
○
×
×
○
○
○
○
○
○
×
×
○:可、×:不可
Pr.160 の設定により読出しの制約がある場合は、読出し/書込みできません。(NETモードからはPr.160 の設定に関係なく読出しできます。)
運転中はできません。
正しいパスワードを入力してもパスワード解除されません。
通信パラメータからのみパラメータクリアが可能です。
備 考
Pr.296 =“4、5、104、105”のいずれか(パスワード登録中)の場合、パラメータユニット(FR-PU07)に、PU JOG速度設
定画面の表示ができません。
パスワード登録中は、パラメータユニット(FR-PU07)のパラメータコピーはできません。
参照パラメータ
Pr.77 パラメータ書込選択 160ページ参照
Pr.160 拡張機能表示選択 161ページ参照
Pr.550 NETモード操作権選択 173ページ参照
Pr.551 PUモード操作権選択 173ページ参照
164
運転モードと操作場所の選択
4.17 運転モードと操作場所の選択
目的
設定が必要なパラメータ
運転モードの選択
ネットワーク運転モードで立ち上げる
操作場所の選択
運転モード選択
電源投入時の運転モードについて
通信運転時の運転指令権と速度指令
権、操作場所の選択
参照ページ
Pr.79
Pr.79、Pr.340
Pr.338、Pr.339、
Pr.550、Pr.551
165
172
173
4.17.1 運転モード選択(Pr.79)
ドライブユニットの運転モードを選択します。
外部指令信号による運転(外部運転)と、操作パネルおよびPU(FR-PU07)による運転(PU運転)と、PU運転と外部運転
併用の運転(外部/PU併用運転)、ネットワーク運転(RS-485通信、または通信オプション使用時)を任意に変更する
ことができます。
LED表示
パラメータ
名 称
番号
初期値
設定範囲
内 容
:消灯
:点灯
外部/PU切換えモード(
0
)でPU、外部の運転モード切
外部運転モード
PU運転モード
換え可能
電源投入時は、外部運転モード
1
PU運転モード固定
外部運転モード
2
外部運転モード固定
NET運転モード
外部、NET運転モードを切り換えて運転可
外部/PU併用運転モード1
速度指令
3
始動指令
操 作 パ ネ ル お よ び PU(FRPU07)で設定または、外部信
外部信号入力
号入力(多段速設定、端子4-5
(端子STF、STR)
間(AU信号ONにて有効))
外部/PU併用運転
モード
外部/PU併用運転モード2
79
運転モード選択
速度指令
0
4
外部信号入力
(端子2、4、JOG、多段速選択
始動指令
操作パネルの
PU(FR-PU07)の
、
、
など)
で入力
PU運転モード
スイッチオーバーモード
6
PU運転、外部運転、NET運転を、運転状態を継続しながら
切換え可能
外部運転モード
NET運転モード
外部運転モード(PU運転インタロック)
X12信号ON
7
PU運転モード
PU運転モードへ移行可能
(外部運転中は出力停止)
外部運転モード
X12信号OFF
PU運転モードへ移行禁止
上記パラメータは運転モードにかかわらず、停止中に変更可能です。
Pr.79 =“3”の速度指令の優先順位は、「多段速運転(RL/RM/RH/REX) > PID制御(X14) > 端子4アナログ入力(AU) > 操作パネルによるデジタル入
力」となります。
165
4
パ
ラ
メ
|
タ
運転モードと操作場所の選択
(1)
運転モードの基本
運転モードとは、ドライブユニットの始動指令や速度指令を入力する場所を指定することです。
基本的に以下の運転モードがあります。
外部運転モード:制御回路端子を使用し、外部に設けたボリュームやスイッチなどで始動指令や速度指令を入力
PU運転モード:操作パネルやパラメータユニット(FR-PU07)を使用して始動指令や速度指令を入力
ネットワーク運転モード(NET運転モード):PUコネクタによるRS-485通信や通信オプションを使用して始動指令や速
度指令を入力
各運転モードは、操作パネルや通信の命令コードにより切り換えることができます。
ドライブユニット
PU運転モード
PU運転モード
操作パネル
FR-PU07
PUコネクタ
ネットワーク
運転モード
通信オプション
3
2
1
パソコン
4
5 6
7
8
9
10
GOT
ボリューム
外部端子
外部運転モード
シーケンサ
スイッチ
備 考
位置制御時には、PU運転モードは選択できません。
PU/外部併用運転は設定値“3”、“4”の2通りあり、設定値により始動方法が異なります。
初期設定では、PU 運転モード以外でも操作パネルおよびパラメータユニット (FR-PU07)の
による停止機能 (PU 停止選
択)が有効になっています。(Pr.75 リセット選択/PU抜け検出/PU停止選択 157ページ参照)
(2)
運転モードの切換え方法
外部運転
・Pr.340=“0、1”設定時
PU操作により切換え
ネットワークにより切換え
ネットワークから
外部運転モード
に切り換える
ネットワークからネットワーク
運転モードに切り換える
PU上の
で 点灯
ネットワーク運転
・Pr.340=“10”設定時
PU運転
PU上の で 点灯
ネットワーク運転
PU運転
PU上の で 点灯
備 考
外部端子による切換えは、下記を参照してください。
PU運転外部インタロック信号(X12) 169ページ参照
PU−外部運転切換信号(X16) 170ページ参照
外部−NET運転切換信号(X65)、NET−PU運転切換信号(X66) Pr.340 通信立上りモード選択 172ページ参照
166
PU上の
で 点灯
171ページ参照
運転モードと操作場所の選択
(3)
運転モード選択フロー
下記のフローで運転モードに関する基本的なパラメータ設定や端子結線を選択してください。
START
結線
パラメータ設定
運転
始動指令場所は?
外部から(STF/STR端子)
速度設定場所は?
外部から(端子2、4、JOG、
多段速など)
STF(正転)/STR(逆転)
(120ページ参照)
周波数設定端子ON
STF(STR)-ON
端子2、4-5(アナログ)、
RL、RM、RH、JOGなど
操作パネルから(デジタル設定) STF(正転)/STR(逆転)
(120ページ参照)
Pr.79 =“3”
(外部/PU併用運転1)
操作パネル、PUデジタル設定
STF(STR)-ON
Pr.338 =“1”
Pr.340 =“1”
通信速度設定コマンド送信
STF(STR)-ON
Pr.338 =“1”
Pr.340 =“1”
通信速度設定コマンド送信
STF(STR)-ON
Pr.79 =“4”
(外部/PU併用運転2)
速度設定端子ON
RUN/FWD/REVキー ON
Pr.79 =“1”
(PU運転固定)
デジタル設定
RUN/FWD/REVキー ON
Pr.339 =“1”
Pr.340 =“1”
速度設定端子ON
通信始動コマンド送信
通信から
(PUコネクタ/通信オプション)
PUコネクタ or
通信オプション?
PUコネクタ(RS-485通信)
STF(正転)/STR(逆転)
(120ページ参照)
通信オプション
通信オプションの結線
(各通信オプション取扱説明書参照)
操作パネルから(RUN/FWD/REVキー)
速度設定場所は?
外部から(端子2、4、JOG、多
段速など)
端子2、4-5(アナログ)、
RL、RM、RH、JOGなど
操作パネルから(デジタル設定)
通信から
(PUコネクタ/通信オプション)
できません
通信から(PUコネクタ/通信オプション)
PUコネクタ or
通信オプション?
PUコネクタ(RS-485通信)
速度設定場所は?
外部から(端子2、4、JOG、多段速など)
端子2、4-5(アナログ)、
RL、RM、RH、JOGなど
操作パネルから(デジタル設定)
通信から(PUコネクタ)
できません
Pr.340 =“1”
通信速度設定コマンド送信
通信始動コマンド送信
Pr.339 =“1”
Pr.340 =“1”
速度設定端子ON
通信始動コマンド送信
通信オプション
速度設定場所は?
外部から(端子2、4、JOG、多段速など)
通信オプションの結線
(各通信オプション取扱説明書参照)
端子2、4-5(アナログ)、
RL、RM、RH、JOGなど
操作パネルから(デジタル設定)
通信から(通信オプション)
通信オプションの結線
(各通信オプション取扱説明書参照)
できません
Pr.340 =“1”
通信速度設定コマンド送信
通信始動コマンド送信
167
4
パ
ラ
メ
|
タ
運転モードと操作場所の選択
(4)
外部運転モード(設定値“0”(初期値)、
“2”)
外部に速度設定器や始動スイッチなどを設けて、ドライブ
ユニットの制御回路端子に接続して、始動指令や速度指令
を与える場合は、外部運転モードを選択します。
基本的に外部運転モード時は、パラメータの変更ができま
3
4
せん。(一部変更可能なパラメータがあります。各パラメー
タの詳細説明のページを参照してください。)
5 6
7
8
9
10
Hz
Pr.79
ドライブユニット
正転始動
逆転始動
モードになります。(ネットワーク運転モードを使用する場
合は、172ページ を参照してください)
パラメータの変更があまり必要ない場合は、設定値“2”と
STF
STR
SD
することで、外部運転モード固定となります。
頻繁にパラメータ変更が必要な場合は、設定値“0”(初期
10
2
5
速度
設定器
=“0、2”を選択すると、電源投入時、外部運転
値)としておくと、操作パネルの
で簡単にPU運転モー
ドに変更できます。PU運転モードにした場合は、必ず外部
運転モードに戻してください。
始動指令としてSTF、STR信号、速度指令として端子2、4
への電圧、電流信号や多段速信号、JOG信号などを使用し
ます。
(5)
PU運転モード(設定値“1”)
操作パネルやパラメータユニット(FR-PU07)のキー操作
のみで始動指令や速度指令を与える場合は、PU運転モー
ドを選択します。また、PUコネクタを使用した通信の場
合も、PU運転モードを選択します。
Pr.79 =“1”を選択すると、電源投入時、PU運転モード
となります。他運転モードへの変更はできません。
操作パネルのMダイヤルでボリュームのように設定する
こともできます。(Pr.161 速度設定/キーロック操作選択
229ページ参照)
操作パネル
(6)
PU/外部併用運転モード1(設定値“3”)
操作パネルやパラメータユニット (FR-PU07) から速度指令
を入力し、外部の始動スイッチにて始動指令を入力する場合
は、PU/外部併用運転モード1を選択します。
Pr.79 =“3”を選択します。他運転モードへの変更はでき
ません。
多段速設定による、外部信号からの速度が入力された場合
は、PUの速度指令より優先します。またAU-ON時は端子4
への指令信号となります。
ドライブユニット
正転始動
逆転始動
STF
STR
SD
168
操作パネル
運転モードと操作場所の選択
(7)
PU/外部併用運転モード2(設定値“4”)
外部のボリュームや多段速、JOG信号などからの速度指令
3
4
5 6
を入力し、操作パネルやパラメータユニット(FR-PU07)の
7
8
9
キー操作により始動指令を入力する場合は、PU/外部併用
運転モード2を選択します。
10
Hz
Pr.79 =“4”を選択します。他運転モードへの変更は、で
きません。
ドライブユニット
速度
設定器
(8)
操作パネル
10
2
5
スイッチオーバーモード(設定値“6”)
運転を継続しながら、PU運転、外部運転、ネットワーク運転(PUコネクタからのRS-485通信や通信オプション使用
時)を切り換えることができます。
運転モード移行
移行操作・運転状態
外部運転→PU運転
操作パネル、パラメータユニットでPU運転モードにします。
回転方向は、外部運転していたときの方向を引き継ぎます。
設定速度はボリューム(速度指令)などの設定値を引き継ぎます。(ただし、電源をOFFするか、ドライ
ブユニットをリセットするとその設定値が消えます。)
外部運転→NET運転
通信によりネットワーク運転モードへのモード変更コマンドを送信します。
回転方向は、外部運転していたときの方向を引き継ぎます。
設定ボリューム(速度指令)などの設定値を引き継ぎます。(ただし、電源をOFFするか、ドライブユ
ニットをリセットするとその設定値が消えます。)
PU運転→外部運転
操作パネル、パラメータユニットの外部運転キーを押します。
回転方向は、外部運転の入力信号により決まります。
設定速度は、外部の速度指令信号により決まります。
PU運転→NET運転
通信によりネットワーク運転モードへのモード変更コマンドを送信します。
回転方向、設定速度はPU運転時の状態を継続します。
NET運転→外部運転
通信により外部モードへの変更コマンドを送信します。
回転方向は、外部運転の入力信号により決まります。
設定速度は、外部の速度指令信号により決まります。
NET運転→PU運転
操作パネル、パラメータユニットにてPU運転モードに切り換えてください。
回転方向、速度指令はネットワーク運転時の状態を継続します。
(9)
PU運転インタロック(設定値“7”)
PU運転インタロック信号(X12)入力のOFFにより、運転モードを強制的に外部運転モードに切り換える機能です。
この機能により、外部指令での運転時、PU運転モードからの切換え忘れにより、ドライブユニットが動作しない現象を
防止することができます。
Pr.79 =“7”(PU運転インタロック)を選択してください。
X12信号(PU運転インタロック信号)入力に使用する端子は、Pr.178∼Pr.184 (入力端子機能選択) に“12”を設定して
機能を割り付けてください。(Pr.178∼Pr.184 は、120ページ を参照してください。)
X12信号が割り付けられていない場合、MRS信号の機能がMRS(出力停止)からPU運転インタロック信号に切り換わり
ます。
機能・動作
X12(MRS)信号
ON
運転モード
運転モード(外部、PU、NET)切換え可能
外部運転中は出力停止
パラメータ書込み
パラメータ書込み可能(Pr.77 パラメータ書込選択、各
パラメータ書込み条件による(パラメータ一覧表48ペー
ジ 参照))
外部運転モードへ強制的に切換え
OFF
外部運転可能
Pr.79 以外のパラメータは書込み不可
PU、NET運転モードへ切換え不可
169
4
パ
ラ
メ
|
タ
運転モードと操作場所の選択
<X12(MRS)信号ON、OFF操作による機能・動作>
運転状況
運転モード
状 態
PU/NET
X12(MRS)信号
停止中
ON→OFF
運転中
ON→OFF
停止中
運転中
外部
OFF→ON
ON→OFF
OFF→ON
ON→OFF
外部
運転
PU、NET運転
運転状態
モード
モードへの移行
外部運転の速度設定、始動信号が入っていればそ
不可
の状態で運転する。
不可
可
不可
不可
不可
停止中
外部
運転中→出力停止
出力停止→運転
始動信号 (STF、STR) の ON、OFF 状態に関係なく、外部運転モードに切り換わります。したがって、STF、STR のどちらかが ON の状態で
X12(MRS)信号をOFFしたときモータは外部運転で運転します。
アラーム発生時、操作パネルの
を押すことによってドライブユニットリセットができます。
注 記
X12(MRS)信号がONでも始動信号(STF、STR)がONの状態ではPU運転モードへ移行できません。
MRS信号をPUインタロック信号として使用する場合、MRS信号をONとし、PU運転モードのときにPr.79 を“7”以外に書
き換えると、MRS信号は通常のMRS機能(出力停止)として動作します。また、Pr.79 を“7”とした時点でPUインタロック
信号となります。
MRS信号をPU運転インタロック信号として使用する場合も、信号の論理はPr.17 の設定に従います。Pr.17 =“2”のとき
は上記説明におけるONはOFFに、OFFはONになります。
Pr.178∼Pr.184 (入力端子機能選択) により端子割付の変更を行うと、他の機能に影響を与えることがあります。各端子の機
能を確認してから設定を行ってください。
(10) 外部信号による運転モードの切換え(X16信号)
外部運転と操作パネルからの運転を併用する場合、PU−外部運転切換信号(X16)を使えば、停止中(モータ停止中、始動
指令OFF)にPU運転モードと外部運転モードを切り換えることができます。
Pr.79 =“0、6、7”のとき、PU運転モード−外部運転モードの切換えができます。(Pr.79 =“6”スイッチオーバー
モードは、運転中も変更可能)
X16信号入力に使用する端子は、Pr.178∼Pr.184 (入力端子機能選択) に“16”を設定して機能を割り付けてください。
Pr.79
ON(外部)
OFF(PU)
0(初期値)
外部運転モード
PU運転モード
1
備 考
外部、PU、NET運転モードに切換え可能
PU運転モード
PU運転モード固定
2
外部運転モード
外部運転モード固定(NET運転モードに切換え可能)
3、4
外部/PU併用モード
6
外部運転モード
X12(MRS)
7
X16信号状態運転モード
設定値
ON
X12(MRS)
OFF
外部運転モード
PU運転モード
PU運転モード
外部運転モード
外部/PU併用モード固定
運転を継続しながら、外部、PU、NET運転モードに切換え可能
外部、PU、NET運転モードに切換え可能(外部運転モード時は、出
力停止)
外部運転モード固定(強制的に外部運転モードになります)
備 考
運転モードの状態は、Pr.340 通信立上りモード選択 の設定とX65、X66信号のON/OFF状態に従います。(詳細は、171ペー
ジ参照 )
Pr.79 とPr.340、各信号の優先順位は、Pr.79 >X12 >X66 >X65 >X16 >Pr.340 です。
注 記
Pr.178∼Pr.184 (入力端子機能選択) により端子割付の変更を行うと、他の機能に影響を与えることがあります。各端子の機
能を確認してから設定を行ってください。
170
運転モードと操作場所の選択
(11) 外部信号による運転モードの切換え(X65、X66信号)
Pr.79 =“0、2、6、7”の時、運転モード切換信号(X65、X66)により、停止中(モータ停止中、始動指令OFF)にPU、
外部運転モードからネットワーク運転モードに変更することができます。(Pr.79 =“6”スイッチオーバーモードは、運
転中も変更可能)
ネットワーク運転モードとPU運転モードを切り換える場合
①Pr.79 =“0(初期値)または、6”に設定します。
②Pr.340 通信立上りモード選択 に“10”を設定してください。
③Pr.178∼Pr.184 のいずれかに“65”を設定し、端子にNET−PU運転切換信号(X65)を割り付けてください。
④X65信号-ONでPU運転モード、X65信号-OFFでネットワーク運転モードになります。
Pr.340
Pr.79
X65信号状態
設定値
設定値
ON(PU)
OFF(NET)
0(初期値)
PU運転モード
NET運転モード
1
2
3、4
10
PU運転モード
NET運転モード
外部/PU併用モード
PU運転モード
6
X12(MRS)
ON
X12(MRS)
7
NET運転モード
備 考
外部運転モード切換え不可
PU運転モード固定
NET運転モード固定
外部/PU併用モード固定
運転を継続しながら運転モード切換え可能
外部運転モード切換え不可
外部運転モードとPU運転モード切換え可能 外部運転モード時は出力停止
外部運転モード
OFF
強制的に外部運転モードに切り換わります
X66信号-ONの場合、NET運転モードになります。
X16信号-OFFの場合、PU運転モードになります。また、Pr.550 NETモード操作権選択 =“0(通信オプション指令権)”で通信オプションが装着さ
れていない場合もPU運転モードになります。
X16信号-ONの場合、外部運転モードになります。
ネットワーク運転モードと外部運転モードを切り換える場合
①Pr.79 =“0(初期値)または、2、6、7”に設定します。(Pr.79 =“7”の場合、X12(MRS)信号-ONの時、運転モー
ド切換え可能です。)
②Pr.340 通信立上りモード選択 に“0(初期値)または、1”を設定してください。
③Pr.178∼Pr.184 のいずれかに“66”を設定し、端子にNET−外部運転切換信号(X66)を割り付けてください。
④X66信号-ONでネットワーク運転モード、X66信号-OFFで外部運転モードになります。
Pr.340
Pr.79
X66信号状態
設定値
設定値
0(初期値)
1
2
3、4
6
X12(MRS)
0(初期値)、
1
7
ON
X12(MRS)
OFF
ON(NET)
OFF(外部)
NET運転モード
外部運転モード
PU運転モード
NET運転モード
外部運転モード
備 考
外部/PU併用モード
NET運転モード
外部運転モード
PU運転モード固定
PU運転モード切換え不可
外部/PU併用モード固定
運転を継続しながら運転モード切換え可能
NET運転モード
外部運転モード時は出力停止
外部運転モード
外部運転モード
強制的に外部運転モードに切り換わります
Pr.550 NETモード操作権選択 =“0(通信オプション指令権)”で通信オプションが装着されていない場合、PU運転モードになります。
X16信号-OFFの場合、PU運転モードになります。また、X65信号が割り付けてある場合、X65信号のON/OFF状態にしたがいます。
4
備 考
Pr.79 とPr.340、各信号の優先順位は、Pr.79 >X12 >X66 >X65 >X16 >Pr.340 です。
注 記
Pr.178∼Pr.184 (入力端子機能選択) により端子割付の変更を行うと、他の機能に影響を与えることがあります。各端子の機
能を確認してから設定を行ってください。
参照パラメータ
Pr.15 JOG速度設定 102ページ参照
Pr.4∼6、Pr.24∼27、Pr.232∼Pr.239 多段速運転 100ページ参照
Pr.75 リセット選択/PU抜け検出/PU停止選択 157ページ参照
Pr.161 速度設定/キーロック操作選択 229ページ参照
Pr.178∼Pr.184 (入力端子機能選択) 120ページ参照
Pr.190∼Pr.192(出力端子機能選択) 126ページ参照
Pr.340 通信立上りモード選択 172ページ参照
Pr.550 NETモード操作権選択 173ページ参照
171
パ
ラ
メ
|
タ
運転モードと操作場所の選択
4.17.2 電源投入時の運転モードについて(Pr.79、Pr.340)
電源投入時および瞬停復電時、ネットワーク運転モードで立ち上げることができます。
ネットワーク運転モードで立上り後は、プログラムでパラメータの書込みや運転が可能になります。
PUコネクタや通信オプションを使用した通信運転時に設定します。
パラメータ
名 称
番号
79
340
初期値
設定範囲
0
0∼4、6、7
運転モード選択
通信立上りモード選択
内 容
運転モードを選択
0
(167ページ参照)
Pr.79 の設定に従う
1
ネットワーク運転モード
ネットワーク運転モード
0
10
PU運転モードとネットワーク運転モー
ドを操作パネルから変更可能
上記パラメータは運転モードに関わらず停止中に変更可能です。
Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。ただし、通信オプション接続時は、常に設定可能です。(161ページ参照 )
電源投入時の運転モードを指定する(Pr.340)
(1)
Pr.79 とPr.340 の設定により、電源投入(リセット)時の運転モードは、下記のようになります。
Pr.340
Pr.79
設定値
設定値
0
(初期値)
外部、PU、NET運転モードに切換え可能
1
PU運転モード
PU運転モード固定
2
外部運転モード
3、4
6
7
1
PU運転モードに切換え不可
運転モード切換え不可
外部運転モード
運転を継続しながら、外部、PU、NET運転モードに切換え可能
X12(MRS)信号ON .......... 外部運転モード
外部、PU、NET運転モードに切換え可能
X12(MRS)信号OFF ......... 外部運転モード
外部運転モード固定(強制的に外部運転モードになります)
NET運転モード
1
PU運転モード
2
NET運転モード
3、4
6
外部、NET運転モードに切換え可能
外部/PU併用モード
0
7
10
運転モードの切換えについて
外部運転モード
(初期値)
0
電源投入時、復電時、リセット時の
運転モード
外部/PU併用モード
NET運転モード
Pr.340 =“0”と同一
X12(MRS)信号ON .......... NET運転モード
X12(MRS)信号OFF ......... 外部運転モード
0
NET運転モード
PU、NET運転モードに切換え可能
1
PU運転モード
Pr.340 =“0”と同一
2
NET運転モード
NET運転モード固定
外部/PU併用モード
Pr.340 =“0”と同一
3、4
6
NET運転モード
運転を継続しながら、PU、NET運転モードに切換え可能
7
外部運転モード
Pr.340 =“0”と同一
PU運転モードとネットワーク運転モードを直接切り換えることはできません。
操作パネルの
キーやX65信号でPU運転モードとネットワーク運転モードを切り換えることができます。
参照パラメータ
Pr.79 運転モード選択 172
165ページ参照
運転モードと操作場所の選択
4.17.3 通信運転時の始動指令権と速度指令権(Pr.338、Pr.339、Pr.550、Pr.551)
PUコネクタからのRS-485通信や通信オプションを使用する場合、外部からの始動指令、速度指令を有効にすること
ができます。また、PU運転モード時の指令権を選択することもできます。
指令権を持つ通信機器やパラメータユニットなどは、パラメータの書込みや始動指令などを実行することができます。
パラメータの読出しやモニタは、いずれの運転モードでも実行できます。
パラメータ
名 称
番号
338
339
550
初期値
通信運転指令権
通信速度指令権
NETモード操作権選択
0
0
設定範囲
内 容
0
始動指令権通信
1
始動指令権外部
0
速度指令権通信
1
速度指令権外部
2
速度指令権外部(通信からの速度指令有
効、速度指令端子2無効)
0
NET運転モード時、通信オプションに指
令権
2
NET運転モード時、PUコネクタに指令権
9999
通信オプション自動認識
通常は、PUコネクタに指令権。通信オプ
ションが装着されている場合は、通信オプ
ションに指令権
9999
2
PU運転モード時、PUコネクタに指令権
3
PU運転モード時、USBコネクタに指令権
4
PU運転モード時、操作パネルに指令権
USB自動認識
通常は、操作パネルに指令権。PUコネク
タにパラメータユニットが接続された場
9999
合、PUコネクタに指令権。USBが接続さ
れている場合は、USBコネクタに指令権。
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。ただし、通信オプション接続時は、常に設定可能です。(161ページ参照 )
551
PUモード操作権選択
9999
Pr.550、Pr.551 は、常に書込み可能です。
(1)
ネットワーク運転モードの指令権を選択する(Pr.550)
ネットワーク運転モードの指令権をPUコネクタによるRS-485通信と通信オプションのいずれかに指定できます。
例えば、通信オプションの有無に関わらず、ネットワーク運転モードのとき、PUコネクタからのRS-485通信によるパ
ラメータの書込みや始動指令、速度指令をする場合は、Pr.550 =“2”に設定してください。
注 記
初期設定は、Pr.550 =“9999”(通信オプション自動認識)なので、通信オプションが装着されている場合、PUコネクタを使用
したRS-485通信では、パラメータの書込みや始動指令、速度指令は実行できません。(モニタやパラメータの読出しはできます。)
(2)
PU運転モードの指令権を選択する(Pr.551)
PU運転モードで操作する場所を操作パネル、PUコネクタのいずれかに指定できます。
PU運転モードのとき、PUコネクタからのRS-485通信でパラメータの書込みや始動指令、速度指令を実行する場合は、
Pr.551 =“2”に設定してください。
注 記
Pr.551 =“9999”(初期値)でPUコネクタからのRS-485通信を行う場合、PUモード指令権は、自動的にPUコネクタにはな
りません。ネットワーク運転モードにして指令権を変更してください。
Pr.550 =“2”(NETモードPUコネクタ)、Pr.551 =“2”(PUモードPUコネクタ)に設定した場合、PU運転モードが優先さ
れます。よって、通信オプションが装着されていない場合、ネットワーク運転モードへの切換えはできなくなります。
設定値の変更は次回電源投入時、またはドライブユニットリセット時に有効になります。
Modbus-RTUプロトコルは、PU運転モードでは、使用できません。ネットワーク運転モード(NETモード指令権)にしてください。
173
4
パ
ラ
メ
|
タ
運転モードと操作場所の選択
PU・・・PU運転モード、NET・・・ネットワーク運転モード、・・・指令権なし
Pr.550
Pr.551
設定値
設定値
0
USBコネクタ
2
PU
PU
NET
PU
NET
4
PU
NET
PU
PU
PU
NET
9999
2
PU
PU
3
PU
NET
4
PU
NET
PU
PU
PU
NET
PU
PU
NET
NET
NET
通信オプションなし
NET
通信オプションあり
NET
通信オプションあり
NET
通信オプションなし
9999
(初期値)
2
3
PU
9999
(初期値)
4
9999
(初期値)
備 考
通信オプション
3
(初期値)
2
操作パネル
指令権
PUコネクタ
パラメータ
RS-485通信
ユニット
PU
PU
PU
PU
NET
NET切換え不可
通信オプションあり
通信オプションなし
Modbus-RTUプロトコルは、PU運転モード時使用できません。通信オプションを装着し、Modbus-RTUプロトコルを使用する場合は、Pr.550 = “2”
に設定してください。
通信オプションが装着されていない場合、ネットワーク運転モードに切換えできません。
Pr.551 = “9999”の時、PU指令権の優先順位は、USBコネクタ>パラメータユニット(FR-PU07)> 操作パネル となります。
174
運転モードと操作場所の選択
(3)
通信からの操作可否について
各運転モードの通信からの操作可否について以下に示します。
モニタ、パラメータ読出しは、運転モードに関係なく、どの操作からも可能です。
操作場所
条件
(Pr.551 設定値)
2
PUコネク
(PUコネクタ)
タからの
項目
信による操
上記以外
USBコネ
クタからの
(自動認識)
操作
上記以外
通信オプ
ションから
の通信によ
―
る操作
制御回路
外部端子
―
外部/PU併用
運転モード
1(Pr.79 =3)
外部/PU併用
運転モード
2(Pr.79 =4)
NET運転
(PUコネクタ
使用時)
NET運転
(通信オプショ
ン使用時)
○
×
×
○
×
○
△
△
○
△
運転速度設定
パラメータ書込み
○
×
○
×
×
○
×
○
○
×
○
○
○
○
○
運転指令(始動)
×
×
×
×
○
運転指令(停止)
×
×
×
×
○
×
運転速度設定
×
×
×
×
○
×
×
×
×
×
○
×
○
ドライブユニットリセット
×
×
×
×
運転指令(始動、停止)
○
×
×
○
(USB コネクタ) 運転速度設定
9999
外部
運転
運転指令(停止)
パラメータ書込み
3
PU
運転
運転指令(始動)
ドライブユニットリセット
RS-485通
作
運転モード
×
×
×
○
×
○
×
×
○
×
×
×
×
ドライブユニットリセット
○
○
○
○
○
運転指令(始動、停止)
×
×
×
×
×
×
×
×
×
×
×
×
×
×
×
ドライブユニットリセット
○
○
○
○
運転指令(始動、停止)
×
×
×
×
パラメータ書込み
運転速度設定
パラメータ書込み
運転速度設定
○
×
○
○
×
×
×
×
×
×
×
×
×
×
○
ドライブユニットリセット
×
×
×
×
×
○
パラメータ書込み
ドライブユニットリセット
○
○
○
○
○
運転指令(始動、停止)
×
○
○
×
×
速度設定
×
○
△
○
×
○:可、×:不可、△:一部可
Pr.338 通信運転指令権 、Pr.339 通信速度指令権 の設定値に従います。(173ページ参照)
RS-485通信異常時は、計算機からリセットできません。
PU停止のみ可。PU停止時には、操作パネルにPSを表示します。Pr.75 PU停止選択 の設定に従います。(157ページ参照)
Pr.77 パラメータ書込選択 の設定値、運転状態に応じてパラメータによっては書込みできない場合があります。(160ページ参照)
パラメータによっては運転モード、指令権の有無によらず書込み可能となります。また、Pr.77 =“2”の場合は書込み可能となります。
(パラメータ一覧 48ページ 参照)パラメータクリアはできません。
Pr.550 NETモード操作権選択 =“2”(PUコネクタ有効)、またはPr.550 NETモード操作権選択 =“9999”で通信オプション装着時の場合です。
Pr.550 NETモード操作権選択 =“0”(通信オプション有効)、またはPr.550 NETモード操作権選択 =“9999”で通信オプション装着時の場合です。
多段速設定、端子4-5間(AU信号ONにて有効)で操作可能となります。
4
パ
ラ
メ
|
タ
175
運転モードと操作場所の選択
(4)
異常発生時の動作
運転モード
異常内容
条 件
(Pr.551 設定値)
ドライブユニット
―
異常
2(PUコネクタ)
PUのPU抜け
9999(自動認識)
上記以外
PUコネクタの 2(PUコネクタ)
RS-485通信
上記以外
異常
USBコネクタ
の通信異常
3(USB コネクタ)
9999(自動認識)
上記以外
通信オプショ
ンの通信異常
―
PU運転
外部
運転
外部/PU併用
外部/PU併用
NET運転
NET運転
運転モード1
運転モード2
(PUコネクタ
(通信オプション
(Pr.79 =3)
(Pr.79 =4)
使用時)
使用時)
停止
停止/継続
停止/継続
停止/継続 継続
停止/継続
継続
停止/継続 継続
停止/継続
継続
停止/継続
継続
継続
継続
継続
停止/継続
継続
Pr.75 リセット選択/PU抜け検出/PU停止選択 により選択可能です。
Pr.122 PU通信チェック時間間隔 、Pr.336 RS-485通信チェック時間間隔、Pr.548 USB交信チェック時間間隔 により選択可能です。
通信オプションに従います。
PUJOG運転モードの場合はPU抜けにより常に停止となります。エラー (E.PUE)の発生可否の選択はPr.75 リセット選択/PU抜け検出/PU停止選択 の設
定に従います。
Pr.550 NETモード操作権選択 =“2”(PUコネクタ有効)、またはPr.550 NETモード操作権選択 =“9999”で通信オプション装着時の場合です。
Pr.550 NETモード操作権選択 =“0”(通信オプション有効)、またはPr.550 NETモード操作権選択 =“9999”で通信オプション装着時の場合です。
176
運転モードと操作場所の選択
ネットワーク運転モードの指令権の選択(Pr.338、Pr.339)
(5)
指令権には、ドライブユニットの始動指令や機能の選択に関係する信号を操作する運転指令権と速度設定に関係する信
号を操作する速度指令権があります。
ネットワーク運転モードの場合、外部端子と通信(PUコネクタまたは通信オプション)からの指令は下表の通りとなりま
す。
Pr.338 通信運転指令権
Pr.339 通信速度指令権
操作場所選択
通信からの運転速度
端子2
(端子相当機能) 端子4
0
RL 低速運転指令/遠隔設定クリア
1
RM 中速運転指令/遠隔設定減速
選
択
機
能
Pr.178∼Pr.184 設定値
固定機能
2
RH
高速運転指令/遠隔設定加速
3
4
5
7
RT
AU
JOG
OH
第2機能選択
電流入力選択
JOG運転選択
外部サーマル入力
8
REX 15速選択
10
X10
12
14
16
23
X12
X14
X16
LX
24
MRS
ドライブユニット運転許可信
号
PU運転外部インタロック
PID制御有効端子
PU−外部運転切換
予備励磁
出力停止
0:NET
1:外部
0:NET 1:外部 2:外部 0:NET 1:外部 2:外部
NET
NET
NET
外部
NET
NET
外部
外部
外部
NET
NET
NET
外部
NET
NET
併用
外部
備 考
NET
外部
外部
外部
外部
Pr.59 =“0”
(多段速)
Pr.59 =“1,2”
(遠隔)
外部
併用
外部
外部
NET
外部
NET
外部
NET
外部
Pr.59 =“0”
(多段速)
外部
外部
NET
外部
外部
NET
併用
PU運転インタロック
25 STOP 始動自己保持選択
29 X29 押当て制御切換
30 JOG2 JOG運転選択2
44 X44 P/PI制御切換
60 STF 正転指令
61 STR 逆転指令
62 RES リセット
65 X65 PU−NET運転切換
66 X66 NET−外部運転切換
67 X67 指令権切換
76 X76 近点ドグ
86 SON サーボオン
87 X87 急停止
88 LSP 正転ストロークエンド
89 LSN 逆転ストロークエンド
外部
外部
X12信号が割り付ら
れていない場合
外部
NET
NET
NET
NET
NET
Pr.79 ≠“7”
Pr.79 =“7”
外部
外部
外部
外部
外部
外部
外部
外部
外部
外部
併用
NET
併用
併用
併用
外部
外部
外部
外部
外部
[表の説明]
外部
NET
併用
:外部端子の信号からのみ操作が有効
:通信からのみ操作が有効
:外部端子、通信のいずれからの操作も有効
:外部端子、通信のいずれからの操作も無効
4
備 考
通信の指令権は、Pr.550、Pr.551 の設定にしたがいます。
Pr.338、Pr.339 は、Pr.77 =“2”の設定の場合、運転中に設定変更できますが、一度停止してから設定変更内容は反映されます。
停止するまでは設定変更前の通信運転指令権および通信速度指令権のままです。
177
パ
ラ
メ
|
タ
運転モードと操作場所の選択
(6)
外部信号による指令権の切換え(X67信号)
ネットワーク運転モードの場合、指令権切換信号 (X67) によって、始動指令権、速度指令権を切り換えることができま
す。信号の入力を外部端子と通信の両方から操作する場合に利用できます。
Pr.178∼Pr.184(入力端子機能選択) のいずれかに“67”を設定し、制御端子にX67信号を割り付けてください。
X67信号-OFFのとき始動指令権、速度指令権は制御端子になります。
X67信号状態
信号割付なし
ON
OFF
始動指令権
速度指令権
Pr.338 による
Pr.339 による
制御端子の信号からのみ指令が有効
備 考
X67信号のON/OFF反映は、停止中のみです。運転中端子を切り換えた場合、停止後反映されます。
X67信号-OFFの場合、通信によるリセットはできなくなります。
注 記
Pr.178∼Pr.184 (入力端子機能選択) により端子割付の変更を行うと、他の機能に影響を与えることがあります。各端子の機
能を確認してから設定を行ってください。
参照パラメータ
Pr.59 遠隔機能選択 Pr.79 運転モード選択 178
105ページ参照
165ページ参照
通信運転と設定
4.18 通信運転と設定
目的
設定が必要なパラメータ
計算機リンク通信(PUコネク
タ)の初期設定
PUコネクタからの通信運転
182
Pr.117∼Pr.124
Pr.117、Pr.118、Pr.120、
Pr.122、Pr.343、Pr.502、
Pr.549
Pr.342
Modbus-RTU通信仕様
通信からのパラメータ書込み制限
参照ページ
通信EEPROM書込み選択
199
186
4.18.1 PUコネクタの配線と構成
PUコネクタを使用することによってパソコンなどから通信運転を行うことができます。
PUコネクタは、パソコン、FAなどの計算機と、通信ケーブルで接続し、ユーザプログラムでドライブユニットの運転監視
およびパラメータの読出し、書込みを行うことができます。
(1)
PUコネクタピン配列
ピン番号
ドライブユニット本体
(リセプタクル側)
正面から見て
①
⑧
名称
内容
グランド
①
SG
②
―
パラメータユニット電源
③
RDA
ドライブユニット受信+
④
SDB
ドライブユニット送信-
⑤
SDA
ドライブユニット送信+
⑥
RDB
ドライブユニット受信-
⑦
SG
⑧
―
(端子5と導通しています)
グランド
(端子5と導通しています)
パラメータユニット電源
注 記
②、⑧番ピンは、パラメータユニット用の電源です。RS-485通信を行うときは、使用しないでください。
FREQROL-E700EXシリーズ、E500シリーズ、S500シリーズを混在させてRS-485通信をする際、上記PUコネクタの②、
⑧番ピン(パラメータユニット電源)を誤って接続した場合、ドライブユニット、インバータが動作しなくなったり、破損す
ることがあります。
複数台接続で②、⑧番ピンを接続した場合、電源がONして
いるドライブユニットとOFFしているドライブユニットが混
在すると、ONしているドライブユニットからOFFしている
ドライブユニットへ電源が供給されてしまいます。このとき
<②、⑧番ピンを接続した場合>
ON
OFF
ドライブユニット 保護回路動作 ドライブユニット
(遮断)
PU
PU
コネクタ
コネクタ
電源ONしているドライブユニットで保護回路が動作し、通
OFF
ドライブユニット
PU
コネクタ
通信停止
信が停止します。
4
RS-485通信で複数台接続をする場合は、必ず②、⑧番ピン
が、ドライブユニット間で接続されないようにケーブルの
:電源供給
②、⑧番配線を切断してください。
ドライブユニットから電源供給をするタイプのRS-485変換器を使用する場合は、1台のドライブユニットからのみ電源が供
給されるようにしてください。(下図参照)
計算機
RS-232C
コネクタ
局番1
局番2
局番n
ドライブユニット
PU
コネクタ
ドライブユニット
PU
コネクタ
ドライブユニット
PU
コネクタ
RS-232C⇔RS-485
変換器
分配器
終端抵抗
他のドライブユニット間は
1台のドライブユニットと変換器のみ ②、⑧番ピンを接続しない
②、⑧番ピンを接続する
:電源供給
計算機のLANボード、FAXモデム用ソケットや電話用モジュラーコネクタには接続しないでください。電気的仕様が異なり
ますので、製品が破損することがあります。
179
パ
ラ
メ
|
タ
通信運転と設定
(2)
PUコネクタ通信システム構成
計算機とドライブユニットの接続(1対1接続)
PU
コネクタ
FR-PU07
局番0
計算機
ドライブユニット
ドライブユニット
PU
コネクタ
RS-485
インタフェース
・端子
RS-232C
ケーブル
計算機
局番0
RS-232C
コネクタ
ドライブユニット
RS-232C⇔RS-485
変換器
RJ-45コネクタ②
RJ-45
コネクタ②
RJ-45
コネクタ②
通信ケーブル①
通信ケーブル①
PU
コネクタ
最大15m
通信ケーブル①
計算機と複数台のドライブユニットを組み合わせる場合(1対n接続)
計算機
RS-485
インタフェース
端子
局番0
局番1
局番n(最大32台)
ドライブユニット
PU
コネクタ
ドライブユニット
PU
コネクタ
ドライブユニット
PU
コネクタ
分配器 ③
終端抵抗∗
RJ-45コネクタ②
通信ケーブル①
計算機
RS-232C
コネクタ
RS-232C
ケーブル
最大15m
RS-232C⇔RS-485
変換器
局番1
局番2
局番n
ドライブユニット
PU
コネクタ
ドライブユニット
PU
コネクタ
ドライブユニット
PU
コネクタ
分配器 ③
終端抵抗∗
通信ケーブル①
RJ-45コネクタ②
伝送速度、伝送距離によっては反射の影響を受ける場合があります。この反射により通信に支障をきたす場合は、終端抵抗を設
けてください。PUコネクタを用いた接続の場合は、終端抵抗が取り付かないため、分配器を使用してください。
終端抵抗器は計算機から最も遠方のドライブユニットのみ接続してください。(終端抵抗器:100)
備 考
計算機−ドライブユニット間接続ケーブル
RS-232Cインターフェースをもった計算機とドライブユニットを接続するケーブル(RS232CRS485変換器)については
下記を参照してください。市販品の例 (08年10月時点)
形 式
インタフェース内蔵ケーブル
DAFXIH-CAB(パソコン側 D-SUB25P)
DAFXIH-CABV(パソコン側 D-SUB9P)
+
コネクタ変換ケーブル DINV-485CAB(ドライブユニット側)
メーカ名
お問い合せ
ダイヤトレンド(株)
06-4705-2100
ドライブユニット専用インタフェース内蔵ケーブル
DINV-CABV
変換器ケーブルは、ドライブユニットを複数台接続することはできません (計算機とドライブユニットは、1 対 1 接続となります )。製品には、
RS-232Cケーブル、RS-485ケーブル(通信ケーブル+RJ-45コネクタ)が同梱されるので、別途ケーブルおよびコネクタを準備する必要はあ
りません。製品の詳細については、各メーカにお問い合わせください。
電話番号は予告なしに変更される場合があります。
ケーブルを自作される場合、下記を参照してください。
市販品の例(08年10月時点)
品 名
形 式
プルエイト 24AWG×4P
①
通信ケーブル
②
RJ-45コネクタ
5-554720-3
③
RS-485分配器
BMJ-8(分岐用コネクタ)
メーカ名
三菱電線工業(株)
タイコ エレクトロニクスアンプ㈱
(株)八光電機製作所
通信ケーブルの②、⑧番ピンは使用しないでください。(179ページ参照)
180
通信運転と設定
(3)
RS-485の計算機との配線
RS-485の計算機1台、ドライブユニット1台の場合
ケーブル接続と信号方向
計算機側端子 ∗1
ドライブユニット
PUコネクタ
通信ケーブル
受信データ
SDA
受信データ
SDB
送信データ
RDA
送信データ
RDB
0.2mm2以上
信号グランド
SG
RS-485の計算機1台、ドライブユニットn台(複数台)の場合
ケーブル接続と信号方向
計算機 ∗1
通信ケーブル
受信
送信
終端抵抗
RDB
RDA
SDB
SDA
RDB
RDA
SDB
SDA
SG
RDB
RDA
SDB
SDA
∗2
SG
SG
SG
局番1
局番2
局番n
ドライブユニット
ドライブユニット
ドライブユニット
組み合わせる計算機の取扱説明書に従って接続してください。
計算機の端子番号は、機種によって異なりますので十分に確認してください。
伝送速度、伝送距離によっては反射の影響を受ける場合があります。この反射により通信に支障をきたす場合は、終端抵抗を設けてく
ださい。PUコネクタを用いた接続の場合は、終端抵抗が取り付かないため、分配器を使用してください。終端抵抗器は計算機から最
も遠方のドライブユニットのみ接続してください。(終端抵抗器:100)
注 記
通信ケーブルの②、⑧番ピンは使用しないでください。(179ページ参照)
FREQROL-E700EXシリーズ、E500シリーズ、S500シリーズを混在させてRS-485通信をする際、PUコネクタの②、⑧番
ピン(パラメータユニット電源)を誤って接続した場合、ドライブユニット、インバータが動作しなくなったり、破損すること
があります。
(179ページ参照)
(4)
2線式による接続について
計算機側が2線式の場合、PUコネクタピンの受信端子と送信端子を渡り配線することで2線式で接続することができます。
計算機
ドライブユニット
SDA
SDB
送信イネーブル
受信イネーブル
4
パ
ラ
メ
|
タ
RDA
SG
渡り配線
RDB
SG
備 考
計算機が送信時以外は送信ディセーブル(受信状態)とし、送信中は、計算機自身のデータを受信しないよう受信ディセーブル
(送信状態)となるようなプログラムにしてください。
渡り配線は極力短くしてください。
181
通信運転と設定
4.18.2 RS-485通信の初期設定と仕様(Pr.117∼Pr.120、Pr.123、Pr.124、Pr.549)
ドライブユニットとパソコンをRS-485通信させるために必要な設定を行います。
ドライブユニットのPUコネクタを使用して通信します。
三菱インバータプロトコルまたは、Modbus-RTUプロトコルを使用し、パラメータ設定、モニタなどを行うことが
できます。
計算機とドライブユニットを交信させるためには、通信仕様をドライブユニットに初期設定する必要があります。
初期設定がされていなかったり、設定不良があったりすると、データ交信ができません。
パラメータ
名 称
番号
117
PU通信局番
初期値
0
設定範囲
0∼31(0∼247)
内 容
ドライブユニットの局番指定
1台のパソコンに複数台のドライブユニットを接続
する時に、ドライブユニットの局番を設定する
通信速度
118
PU通信速度
192
48、96、192、384
設定値×100が通信速度
例)192なら19200bps
119
120
123
PU通信ストップビット長
PU通信パリティチェック
PU通信待ち時間
1
2
9999
0
ストップビット長
1bit
1
2bit
10
1bit
11
2bit
0
パリティチェックなし
1
奇数パリティあり
2
偶数パリティあり
0∼150ms
9999
0
124
549
PU通信CR/LF選択
プロトコル選択
1
0
データ長
8bit
7bit
ドライブユニットへ送信後、返信までの待ち時間を
設定。
通信データにて設定。
CR・LFなし
1
CRあり
2
CR・LFあり
0
三菱インバータ(計算機リンク)プロトコル
1
Modbus-RTUプロトコル
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
Pr.549 =“1”(Modbus-RTUプロトコル)のときは、括弧内の設定範囲となります。
注 記
各パラメータの初期設定を行ったあと必ずドライブユニットリセットを行ってください。通信関連のパラメータは変更後、リ
セットを行わないと通信不可となります。
182
通信運転と設定
4.18.3 通信異常時の動作選択(Pr.121、Pr.122、Pr.502)
PUコネクタからのRS-485通信時、通信異常が発生したときの動作を選択できます。
パラメータ
名 称
番号
初期値
設定範囲
内 容
データ受信エラー発生時のリトライ回数許容値。連続
0∼10
121
PU通信リトライ回数
1
エラー発生回数が許容値を超えるとドライブユニット
はトリップする(Pr.502 による)。
三菱インバータ(計算機リンク)プロトコルのみ有効
9999
通信エラーが発生してもドライブユニットはトリップ
しない
RS-485通信可能。ただし、指令権のある運転モード
0
にした瞬間に通信エラー (E.PUE)発生
交信チェック(断線検出)時間の間隔
122
PU通信チェック時間間隔
0
0.1∼999.8s
無交信状態が許容時間以上継続すると、ドライブユ
ニットはトリップする(Pr.502 による)。
9999
交信チェック(断線検出)なし
異常発生時
502
通信異常時停止モード選
択
表示
異常出力
異常解消時
フリーラン
停止
E.PUE
出力
停止
(E.PUE)
1
減速停止
停止後
E.PUE
停止後出力
停止
(E.PUE)
2
減速停止
停止後
E.PUE
出力なし
再始動
0、3
0
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
(1)
リトライ回数設定(Pr.121)
データ受信エラー発生時のリトライ許容回数を設定します。(リトライするデータ受信エラーは191ページ 参照)
データ受信エラーが連続して発生し、設定した許容回数を超えると、ドライブユニットトリップ (E.PUE) し、モータを
停止させます(Pr.502 の設定に従います)。
設定値を“9999”にした場合、データ受信エラーが発生しても、ドライブユニットはトリップせずに軽故障出力信号
(LF)を出力します。
LF信号出力に使用する端子は、Pr.190∼Pr.192(出力端子機能選択)に“98(正論理)または198(負論理)”を設定して機
能を割り付けてください。
アラーム(E.PUE)
4
NAK
不正
NAK
不正
ACK
ENQ
計算機
ドライブユニット
ドライブユニット
ENQ
例)PUコネクタ通信、Pr.121=“1”(初期値)の場合
計算機
受信エラー
パ
ラ
メ
|
タ
受信エラー
ENQ
受信エラー
受信エラー
ON
ON
正常
ACK
不正
NAK
不正
NAK
ACK
ドライブユニット
ドライブユニット
ENQ
計算機
ENQ
例)PUコネクタ通信、Pr.121=“9999”の場合
計算機
LF
OFF
OFF
備 考
Pr.121 は、三菱インバータ(計算機リンク)プロトコルのみ有効です。Modbus-RTU通信プロトコルでは機能しません。
183
通信運転と設定
断線検出(Pr.122)
(2)
ドライブユニット、計算機間の断線検出を行い、断線した(通信が途絶えた)場合、通信エラー (E.PUE)が発生してドラ
イブユニットを出力遮断します(Pr.502 の設定に従います)。
設定値を“9999”にした場合、交信チェック(断線検出)は行いません。
設定値が“0”(初期値)の場合、RS-485通信はできますが、指令権のある運転モード(初期設定では、ネットワーク運
転モード)に変更した瞬間に通信エラー (E.PUE)が発生します。
設定値を“0.1s∼999.8s”に設定すると、断線検出を行います。断線検出を行う場合は、計算機から通信チェック時
間間隔以内でデータ(三菱インバータプロトコルコントロールコード 190ページ参照 、Modbus-RTU通信プロトコル
200ページ参照 )を送信する必要があります。(マスタから送信するデータの局番設定に関係なく、ドライブユニットは
通信チェック(通信チェックカウンタのクリア)を行います。)
通信チェックは、指令権のある運転モード(初期設定では、ネットワーク運転モード)で、1回目の通信から開始します。
例)PUコネクタ通信、Pr.122=“0.1∼999.8s”の場合
外部
計算機
ドライブユニット
ドライブユニット
PU
ENQ
運転モード
計算機
アラーム(E.PUE)
Pr.122
チェック開始
交信チェック
カウンター
時間
注意
危険防止のため、通信チェック時間間隔を設定してから運転を行ってください。
データの交信は、自動的に行われるのではなく、計算機の方から交信要求を行った場合に、1回のみ実行されるよう
になっていますので、運転中に信号線の断線などで交信ができなくなると、ドライブユニットを停止させることがで
きません。通信チェック時間間隔が経過するとアラーム停止(E.PUE)となります。
ドライブユニットのRES信号をON、または電源遮断の場合にはフリーラン停止が可能です。
信号線の断線、計算機の故障などの交信が途切れる異常が発生しても、ドライブユニット側では異常の検出を行いま
せんので十分に注意してください。
184
通信運転と設定
(3)
通信異常時の停止動作選択(Pr.502)
リトライ回数オーバー (三菱インバータプロトコルのみ)や断線検出エラーが発生した場合の停止動作を選択できます。
異常発生時の動作
Pr.502 設定値
0( 初期値 )
1
2
3
動作状態
表示
異常出力
フリーラン停止
E. PUE 点灯
減速停止
停止後 E. PUE 点灯
出力する
停止後出力する
出力しない
設定値 0 と同一
異常解消時の動作
Pr.502 設定値
0( 初期値 )
1
2
3
動作状態
表示
異常出力
停止状態継続
E. PUE 継続
出力継続
再始動
通常表示
設定値 0 と同一
出力しない
Pr.502 設定値“1”
Pr.502 設定値“0(初期値)、3”
異常発生
通信異常
異常発生
異常解消
OFF
ON
OFF
通信異常
OFF
異常解消
ON
OFF
モータフリーラン
回
転
速
度
回
転
速
度
減速停止
時間
時間
異常表示
(E.PUE)
異常出力
(ALM)
異常表示
(E.PUE)
異常出力
(ALM)
表示
OFF
ON
表示
OFF
ON
Pr.502 設定値“2”
異常発生
通信異常
OFF
異常解消
ON
回
転
速
度
OFF
減速停止
時間
4
表示
異常表示
(E.PUE)
異常出力
(ALM)
OFF
備 考
異常出力は、異常出力信号(ALM信号)やアラームビット出力を示します。
異常出力する設定の場合、異常内容がアラーム履歴に記憶されます。( アラーム履歴への書込みは、異常出力を行うときに実
施します。)
異常出力をしない場合、異常内容は、アラーム履歴のアラーム表示に一時的に上書きされますが記憶されません。
異常解除後、アラーム表示は、通常のモニタに戻り、アラーム履歴は元のアラーム表示に戻ります。
Pr.502 が“1、2” の場合、減速時間は通常の減速時間設定(Pr.8、Pr.44、Pr.45 など)となります。また、再始動時の加速時間
は、通常の加速時間設定(Pr.7、Pr.44 など)となります。
Pr.502 が“2”の場合、再始動時の運転指令・速度指令は異常発生前の指令に従います。
通信回線異常で、Pr.502 が“2”の場合、減速中に異常解除された時は、その時点から再加速します。
参照パラメータ
Pr.7 加速時間, Pr.8 減速時間 108ページ参照
Pr.190∼Pr.192(出力端子機能選択) 126ページ参照
185
パ
ラ
メ
|
タ
通信運転と設定
4.18.4 通信EEPROM書込みの選択(Pr.342)
ドライブユニットのPUコネクタやUSB通信、通信オプションからパラメータの書込みを実施した場合、パラメータ
の記憶デバイスをEEPROM+RAMからRAMのみに変更することができます。頻繁にパラメータ変更が必要な場合に
設定します。
パラメー
タ番号
名 称
初期値
設定範囲
0
342
通信EEPROM書込み選択
0
1
内 容
通信によるパラメータ書込みを実施したとき、
EEPROMとRAMに書き込む
通信によるパラメータ書込みを実施したとき、
RAMに書き込む
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。ただし、通信オプション接続時は、常に設定可能です。(161ページ参照 )
パラメータを頻繁に変更する場合は、Pr.342 の設定値を“1”にして、RAMへの書込みとしてください。
“0(初期値)”(EEPROM書込み)設定のままでパラメータ書込みを頻繁に行うとEEPROMの寿命が短くなります。
備 考
Pr.342 =“1”(RAMのみ書込み)と設定した場合、ドライブユニットの電源を遮断すると、変更したパラメータの内容は消
えてしまいます。従って電源を再投入したときのパラメータの内容は、前回EEPROMに記憶された値となります。
操作パネルで読み出したパラメータ設定値はEEPROMに記憶された値となります。従って、通信によりRAMのみ設定値を変
更した場合は、操作パネル読み出し値と異なる場合があります。
186
通信運転と設定
4.18.5 三菱インバータプロトコル(計算機リンク通信)について
ドライブユニットのPUコネクタから三菱インバータプロトコル(計算機リンク通信)を使用し、パラメータ設定、モニ
タなどを行うことができます。
(1)
通信仕様
通信仕様を下記に示します。
項 目
通信プロトコル
パラメータ
三菱プロトコル(計算機リンク)
EIA-485(RS-485)
Pr.549
1:N(最大32台)、設定は0∼31局
Pr.117
4800/9600/19200/38400bps選択可
準拠規格
接続台数
通信速度
関連
内 容
制御手順
調歩同期方式
Pr.118
通信方法
半二重方式
キャラクタ方式
ASCII(7bit/8bit選択可能)
スタートビット
1bit
Pr.119
通信仕様
PUコネクタ
ストップビット長
1bit/2bit選択可能
Pr.119
パリティチェック
有(偶数、奇数)無 選択可能
Pr.120
エラーチェック
サムコードチェック
ターミネータ
CR/LF(有無選択可能)
Pr.124
有無 選択可能
Pr.123
待ち時間設定
(2)
交信手順
うな手順で行います。
1) 要求データを計算機からドライブユニットに
*2
1)
ドライブユニット
4)
2)
ドライブユニット
3)
*1
↓(データの流れ)
計算機
計算機とドライブユニットのデータ交信は、次のよ
データ読出し時
計算機
↓(データの流れ)
データ書込み時
5)
時間
送信します。(ドライブユニットから自発的に
データを送信することはありません。)
2) 通信待ち時間待った後
3) データ送信計算機の要求に対し、ドライブユ
ニットから返信データを計算機へ送信しま
す。
4) ドライブユニット処理時間待った後
5) ドライブユニットの返信データ 3)に対する、
計算機からの回答を送信します。( 5)を送信
しなくても、以降の通信は正常に行えます。)
データ誤り発生時にリトライが必要な場合には、ユーザプログラムによりリトライ動作を実行してください。リトライ連続回数がパラメータの設定値を
4
超えると、ドライブユニットはアラーム停止します。
データ誤り発生を受信するとドライブユニットは再度返信データ 3) を計算機に返します。データ誤り連続回数がパラメータの設定値以上になると、ドラ
イブユニットはアラーム停止します。
パ
ラ
メ
|
タ
187
通信運転と設定
(3)
交信動作の有無とデータフォーマット種類
計算機とドライブユニットのデータ交信は、アスキーコード(16進コード)で行います。
交信動作の有無とデータフォーマットの種類を表します。
記号
運転指令
運転速度
複数命令
パラメータ
書込み
ドライブ
ユニット
リセット
モニタ
パラメータ
読出し
A1
A,A2
A3
A,A2
A
B
B
有
有
有
有
有
有
C
C
C1
C
C
有
E,E1,E2,
D
D
D
D
D
D
D
計算機のユーザプログラムに従って
ドライブユニットへ交信要求を送信
ドライブユニットデータ処理時間
誤りなし
ドライブユニットから
の返信データ(①デー (要求受付)
誤り有り
タ誤りをチェック)
(要求拒否)
計算機の処理遅れ時間
誤りなし
返信データ③に対す
(ドライブユニット
る計算機からの回答 は無処理)
(③データ誤りを
誤り有り
(ドライブユニット
チェック)
は③を再出力)
①
②
③
④
⑤
動作内容
E3
E,E2
10ms以上
無
無
無(C)
無
無
無(C)
無(C)
無
無
F
無
無
F
F
計算機からドライブユニットへの交信要求データにおいて“データ誤りなし(ACK)”の後にも10ms以上必要となります。(190ページ参照)
ドライブユニットリセット要求に対するドライブユニットからの返信は、選択可能です。(194ページ参照)
Pr.37 に“0.01∼9998”を設定し、命令コードHFFに“01”を設定するとデータフォーマットはA2もしくはE2となります。また、Pr.37 の読出
し、書込みは、常にデータフォーマットA2、E2です。
モードエラー、範囲外エラーの場合は、C1のデータにエラーコードを含みます (198ページ参照)。それ以外のエラーは、Dのデータフォーマットで
エラーを返します。
データ書込みフォーマット
計算機からドライブユニットへの交信要求データ(①)
フォー
1
マット
2
3
4
5
6
A
ENQ ドライブユニット
命令コード
局番
A1
ENQ ドライブユニット
命令コード
局番
A2
ENQ ドライブユニット
命令コード
局番
A3
ENQ ドライブユニット
命令コード
局番
7
8
キャラクタ数
9
10
11
データ
データ
サム
チェック
12
13
サム
チェック
15
サム
チェック
16
17
18
19
サム
チェック
17
18
19
サム
チェック
データ
送信 受信
データ データ
タイプ タイプ
14
データ1
データ2
ドライブユニットから計算機への返信データ(③ データ誤りなし)
フォー
1
マット
C
C1
2
3
4
5
6
7
8
キャラクタ数
9
10
11
12
13
14
15
16
ACK ドライブユニット
局番
送信 受信
STX ドライブユニット データ
データ
局番 タイプ タイプ
エラー エラー
コード コード
1
2
データ1
データ2
ETX
ドライブユニットから計算機への返信データ(③ データ誤りあり)
フォーマット
D
188
1
キャラクタ数
2
3
4
NAK ドライブユニット エラー
局番
コード
5
コントロールコードを示します。
ドライブユニット局番はH00∼H1F(0∼31局)の範囲で16進コードで指定します。
Pr.123 PU通信待ち時間 ≠9999の設定の場合、データフォーマットにおける“待ち時間”は無しで交信要求データを作成してください。(キャラクタ
数は1つ減ります。)
CR、LFコード
計算機からドライブユニットにデータを送信するときデータ群の最後にCR(改行)、LF(行送り)のコードが計算機によっては、自動的に設定されます。
この場合は、ドライブユニットからも計算機に合わせて設定する必要があります。また、CR、LFコードはPr.124 PU通信CR/LF選択 により、有無を
選択することができます。
通信運転と設定
データ読出しフォーマット
計算機からドライブユニットへ交信要求データ(①)
フォーマット
B
1
2
3
ENQ ドライブユニット
局番
4
キャラクタ数
5
6
命令コード
7
8
9
サム
チェック
ドライブユニットから計算機への返信データ(③ データ誤りなし)
フォーマット
E
1
STX
2
3
4
ドライブユニット
局番
5
6
キャラクタ数
7
8
ETX
読出しデータ
E1
STX ドライブユニット
読出しデータ
局番
ETX
E2
STX ドライブユニット
局番
読出しデータ
フォーマット
E3
1
2
サム
チェック
キャラクタ数
4∼23
3
STX ドライブユニット
局番
読出しデータ(機種情報)
9
10
サム
チェック
11
12
13
ETX
24
ETX
サム
チェック
25
26
サム
チェック
27
ドライブユニットから計算機への返信データ(③ データ誤りあり)
フォーマット
D
1
2
キャラクタ数
3
4
NAK ドライブユニット エラー
局番
コード
5
計算機からドライブユニットへの送信データ(⑤)
フォーマット
キャラクタ数
2
3
4
C
(データ誤りなし)
ACK ドライブユニット
局番
F
NAK ドライブユニット
局番
(データ誤りあり)
1
コントロールコードを示します。
ドライブユニット局番はH00∼H1F(0∼31局)の範囲で16進コードで指定します。
Pr.123 PU通信待ち時間 ≠9999の設定の場合、データフォーマットにおける“待ち時間”は無しで交信要求データを作成してください。(キャラクタ
数は1つ減ります。)
CR、LFコード
計算機からドライブユニットにデータを送信するときデータ群の最後にCR(改行)、LF(行送り)のコードが計算機によっては、自動的に設定されます。
この場合は、ドライブユニットからも計算機に合わせて設定する必要があります。また、CR、LFコードはPr.124 PU通信CR/LF選択 により、有無を
選択することができます。
4
パ
ラ
メ
|
タ
189
通信運転と設定
(4)
データの説明
① コントロールコード
信号名
アスキーコード
STX
H02
Start Of Text(データ開始)
内 容
End Of Text(データ終了)
ETX
H03
ENQ
H05
Enquiry(交信要求)
ACK
H06
Acknowledge(データ誤りなし)
LF
H0A
Line Feed(行送り)
CR
H0D
Carriage Return(改行)
NAK
H15
Negative Acknowledge(データ誤り有り)
② ドライブユニット局番
計算機と交信を行うドライブユニットの局番を指定します。
③ 命令コード
計算機からドライブユニットに対する運転、モニタ等の処理要求内容を指定します。したがって、命令コードを任意に
設定することによって各種の運転、監視を行うことができます。(48ページ参照)
④ データ
ドライブユニットに対する速度、パラメータ等の書込み、読出しデータを表します。命令コードに対応して、設定デー
タの意味、設定範囲が決まります。(48ページ参照)
⑤ 待ち時間
ドライブユニットが計算機からデータを受信後、返信データを送信するまでの待ち時間を規定します。待ち時間は計算
機の応答可能時間に合わせ、0∼150msの範囲内において10ms単位で設定します。(例;1:10ms、2:20ms)
計算機
↓
ドライブユニット
ドライブユニットデータ処理時間
= 待 ち 時 間 + データチェック時間
(設定値×10ms)
(約10∼30ms 命令コード
によって異なります)
ドライブユニット
↓
計算機
備 考
Pr.123、Pr.337 (待ち時間設定) ≠9999の設定の場合、データフォーマットにおける“待ち時間”は無しで交信要求データを
作成してください。(キャラクタ数は1つ減ります。)
データチェック時間は、命令コードにより異なります。(191ページ参照)
⑥ サムチェックコード
対象となるデータのアスキーコードに変換したコードをバイナリコードで加算した結果(サム)の下位1バイト(8ビット)
をアスキー 2桁(16進)に変換したものをサムチェックコードといいます。
計算機→ドライブユニット
アスキーコード→
ENQ
H05
局番
命令
コード
*待ち時間
(例1)
データ
サム
チェック
コード
1
E
1
1
0
7
A
D
F
4 ←バイナリコード
0
H30 H31 H45 H31 H31 H30 H37 H41 H44 H46 H34
↓
H30+H31+H45+H31+H31+H30+H37+H41+H44
=H1F4
サム
*Pr.123 PU通信待ち時間設定 ≠“9999”の設定の場合、データフォーマットにおける
“待ち時間”は無しで交信要求データを作成してください。(キャラクタ数は1つ減ります。)
(例2)
ドライブユニット→計算機
アスキーコード→
STX
H02
局番
読出し
データ
0
7
1
1
7
0
3
0 ←バイナリコード
H30 H31 H31 H37 H37 H30 H03 H33 H30
↓
H30+H31+H31+H37+H37+H30
= H130
サム
190
サム
ETX チェック
コード
通信運転と設定
⑦ エラーコード
ドライブユニットで受信したデータに誤りがあった時に、NAKコードの他にエラー内容を計算機に返信します。
エラー
エラー項目
コード
エラー内容
H0
計算機NAKエラー
H1
パリティエラー
H2
ドライブユニット側の動作
計算機からの交信要求データに、リトライ許容回数以上続けて誤
りがあった。
パリティの指定に対して内容が異なっている。
サムチェックエラー
計算機側のサムチェックコードとドライブユニットで受信した
リトライ許容回数以上連続し
データのサムチェックコードの値が異なる。
ドライブユニットで受信したデータの文法に誤りがある。または、 てエラーが発生するとアラー
H3
プロトコルエラー
所定時間内にデータ受信が完了しない。CR、LFがパラメータ設
ム停止(E.PUE)
定通りでない。
H4
H5
フレーミングエラー
オーバーラン
H6
H7
ストップビット長が初期設定値と異なっている。
ドライブユニットでデータ受信完了する前に、計算機から次の
データが送られてきた。
――――
――――
キャラクターエラー
――――
使用しないキャラクタ(0∼9、A∼F、コントロールコード以外の
キャラクタ)を受信した。
受信データを受け付けない。
ただし、アラーム停止となら
ない。
H8
――――
――――
――――
H9
――――
――――
――――
計算機リンク運転モードでない時や操作指令権がない時、ドライ
HA
モードエラー
ブユニット運転中の時などにパラメータの書込みを行おうとし
た。
受信データを受け付けない。
HB
命令コードエラー
存在しない命令コードが指定された。
ただし、アラームとならない。
HC
(5)
パラメータ、運転速度書込みなどで、設定可能範囲外のデータが
データ範囲エラー
指定された。
HD
――――
――――
――――
HE
――――
――――
――――
HF
――――
――――
――――
応答時間
データ送信時間 (下記計算式参照)
ドライブユニットデータ処理時間 = 待 ち 時 間 + データチェック時間
(設定値×10ms)
(命令コードによって
計算機
異なります(下表参照))
ドライブユニット
ドライブユニット
時間
10ms以上必要です
データ送信時間 (下記計算式参照)
計算機
[データ送信時間計算式]
1
通信速度(bps)
×
データキャラクタ数
(188ページ参照)
通信仕様
× (合計ビット数)= データ送信時間(s)
通信仕様
データチェック時間
名 称
ビット数
ストップビット長
データ長
パリティチェック
4
(下記参照)
項 目
1ビット
各種モニタ、運転指令、
2ビット
速度設定(RAM)
7ビット
パラメータ読出し/書込み、
8ビット
速度設定(EEPROM)
有
1ビット
無
0
パ
ラ
メ
|
タ
チェック時間
<12ms
<30ms
パラメータクリア/オールクリア
<5s
リセット指令
返答なし
上表のほかにスタートビット1ビットが必要です。
最小合計ビット数・・・9ビット
最大合計ビット数・・・12ビット
191
通信運転と設定
(6)
プログラム上の注意事項
① 計算機からデータに誤りがあったときは、ドライブユニットはデータを受け付けません。よって、ユーザプログラムには
必ずデータ誤りのリトライプログラムを挿入してください。
② データの交信は、運転指令、モニタなどすべて、計算機の方から交信要求を行うことにしているため、ドライブユニット
から自発的にデータを返したりはしません。よって、モニタ時などには、計算機から必要に応じてデータの読出し要求を
出すようにプログラムを設計してください。
③ プログラム例
運転モードをネットワーク運転に切り換える場合
Microsoft® Visual C++® (Ver.6.0)のプログラミング例
#include <stdio.h>
#include <windows.h>
void main(void){
HANDLE
hCom;
DCB
hDcb;
COMMTIMEOUTS
hTim;
char
char
char
int
int
BOOL
int
int
// 通信ハンドル
// 通信設定用の構造体
// タイムアウト設定用の構造体
szTx[0x10];
// 送信バッファ
szRx[0x10];
// 受信バッファ
szCommand[0x10];// コマンド
nTx,nRx;
// バッファサイズ格納用
nSum;
// サムコード計算用
bRet;
nRet;
i;
//COM1ポートをオープンする
hCom = CreateFile("COM1", (GENERIC_READ | GENERIC_WRITE), 0, NULL, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, NULL);
if(hCom != NULL) {
// COM1ポートの通信設定をする
GetCommState(hCom,&hDcb);
// 現在の通信情報を取得
hDcb.DCBlength = sizeof(DCB);
// 構造体サイズ設定
hDcb.BaudRate = 19200;
// 通信速度=19200bps
hDcb.ByteSize = 8;
// データ長=8bit
hDcb.Parity = 2;
// 偶数パリティ
hDcb.StopBits = 2;
// ストップビット=2bit
bRet = SetCommState(hCom,&hDcb);
// 変更した通信情報の設定
if(bRet == TRUE) {
// COM1ポートのタイムアウト設定をする
GetCommTimeouts(hCom,&hTim);
// 現状のタイムアウト値取得
hTim.WriteTotalTimeoutConstant = 1000;
// 書込みタイムアウト1秒
hTim.ReadTotalTimeoutConstant = 1000;
// 読込みタイムアウト1秒
SetCommTimeouts(hCom,&hTim);
// 変更したタイムアウト値設定
// 局番1のドライブユニットをネットワーク運転モードに切り換えるコマンドを設定
sprintf(szCommand,"01FB10000");
// 送信データ(NET運転書込み)
nTx = strlen(szCommand);
// 送信データサイズ
// サムコードを生成する
nSum = 0;
// サムデータ初期化
for(i = 0;i < nTx;i++) {
nSum += szCommand[i];
// サムコードを計算
nSum &= (0xff);
// データをマスク
}
// 送信データを生成する
memset(szTx,0,sizeof(szTx));
// 送信バッファ初期化
memset(szRx,0,sizeof(szRx));
// 受信バッファ初期化
sprintf(szTx,"\5%s%02X",szCommand,nSum);// ENQコード+送信データ+サムコード
nTx = 1 + nTx + 2;
// ENQコード数+送信データ数+サムコード数
nRet = WriteFile(hCom,szTx,nTx,&nTx,NULL);
// 送信
if(nRet != 0) {
nRet = ReadFile(hCom,szRx,sizeof(szRx),&nRx,NULL);
// 受信
if(nRet != 0) {
// 受信データを表示する
for(i = 0;i < nRx;i++) {
printf("%02X ",(BYTE)szRx[i]);// 受信データをコンソール出力
// アスキーコードを16進数で表示します。'0'の場合30と表示します。
}
printf("\n\r");
}
}
}
CloseHandle(hCom);
}
}
192
// 通信ポートを閉じる
通信運転と設定
概略フロー
ポートオープン
通信設定
タイムアウト設定
送信データ処理
データ設定
サムコード算出
データ送信
受信データ待ち
受信データ処理
データ取込み
画面表示
注意
危険防止のため、通信チェック時間間隔を設定してから運転を行ってください。
データの交信は、自動的に行われるのではなく、計算機の方から交信要求を行った場合に、1回のみ実行されるよう
になっていますので、運転中に信号線の断線などで交信ができなくなると、ドライブユニットを停止させることがで
きません。通信チェック時間間隔が経過するとアラーム停止(E.PUE)となります。
ドライブユニットのRES信号をON、または電源遮断の場合にはフリーラン停止が可能です。
信号線の断線、計算機の故障などの交信が途切れる異常が発生しても、ドライブユニット側では異常の検出を行いま
せんので十分に注意してください。
4
パ
ラ
メ
|
タ
193
通信運転と設定
(7)
設定項目および設定データ
パラメータ設定が完了した後に命令コード、データを以下のように設定して、計算機から交信を始めることにより各種の
運転制御、監視が可能になります。
No.
項 目
1
運転モード
命令
読出/
書込
コード
読出
H7B
データ桁数
データ内容
(フォーマット)
H0000:ネットワーク運転
4桁(B,E/D)
H0001:外部運転
書込
HFB
4桁(A,C/D)
H0002:PU運転
H0000∼HFFFF:回転速度 単位1r/min
回転速度
/出力周波数
出力周波数 単位0.01Hz(Pr.144 =10(2、4、6、8)のとき)
読出
H6F
機械速度 単位0.001(Pr.37 =0.01∼9998のとき)
Pr.52 =“100”とした場合、停止中と運転中でモニタ値が異な
4桁(B,E/D)
6桁(B,E2/D)
る(135ページ参照)
モ
2
ニ
タ
出力電流
読出
H70
H0000∼HFFFF:出力電流(16進)単位0.01A
4桁(B,E/D)
出力電圧
読出
H71
H0000∼HFFFF:出力電圧(16進)単位0.1V
4桁(B,E/D)
特殊モニタ
読出
H72
H0000∼HFFFF:命令コードHF3で選択されたモニタのデータ
4桁(B,E/D)
6桁(B,E2/D)
特殊モニタ
読出
H73
H01∼H3F:モニタ選択データ
2桁(B,E1/D)
選択No.
書込
HF3
特殊モニタNo表(196ページ)参照
2桁(A1,C/D)
H0000∼HFFFF:過去2回分の異常内容
b15
異常内容
読出
H74∼
H77
b8b7
b0
H74
1回前の異常
最新の異常
H75
3回前の異常
2回前の異常
H76
5回前の異常
4回前の異常
H77
7回前の異常
6回前の異常
4桁(B,E/D)
異常データ表(196ページ)参照
3
運転指令(拡張)
書込
HF9
正転信号(STF)や逆転信号(STR)などの制御入力指令(詳細は197
運転指令
書込
HFA
ページ参照)
読出
H79
読出
H7A
4桁(A,C/D)
2桁(A1,C/D)
ドライブユニットス
テータスモニタ(拡
4
張)
ドライブユニットス
テータスモニタ
設定速度(RAM)
H6D
(EEPROM)
H6E
HED
設定速度/設定周波数をRAMまたはEEPROMに書き込む
H0000∼HFFFF:設定速度 単位1r/min
5
設定速度(RAM)
設定周波数 単位0.01Hz(Pr.144 =10(2、4、6、8)のとき)
書込
設定速度
機械速度 単位0.001(Pr.37 =0.01∼9998のとき)
HEE
(RAM,EEPROM)
4桁(B,E/D)
2桁(B,E1/D)
設定速度/設定周波数をRAMまたはEEPROMから読み出す
H0000∼HFFFF:設定速度 単位1r/min
設定周波数 単位0.01Hz(Pr.144 =10(2、4、6、8)のとき)
機械速度 単位0.001(Pr.37 =0.01∼9998のとき)
読出
設定速度
正転、逆転中やドライブユニット運転中(RUN)などの出力信号の
状態をモニタ(詳細は197ページ参照)
4桁(B,E/D)
6桁(B,E2/D)
4桁(A,C/D)
6桁(A2,C/D)
連続的に設定速度/設定周波数を変更する場合はドライブユ
ニットのRAMに書き込む(命令コード:HED)
H9696:ドライブユニットリセット
計算機から交信を行った時に、ドライブユニットはリセットさ
6
ドライブユニット
リセット
書込
HFD
4桁(A,C/D)
れるために、計算機に対して返信データを送ることは不可能
H9966:ドライブユニットリセット
正常に送信された場合、計算機にACKを返信後、ドライブユ
4桁(A,D)
ニットリセット
7
194
異常内容一括クリア
書込
HF4
H9696:異常履歴の一括クリア
4桁(A,C/D)
データフォーマット(A,A1,A2,A3,B,C,C1,D,E,E1,E2,E3,F)については、188ページ を参照してください。
Pr.37 =“0.01∼9998”、Pr.144 =“2∼10”を設定し、命令コードHFFに“01”を設定すると、単位は0.001となりデータフォーマットはE2、
A2となります。
通信運転と設定
No.
項 目
命令
読出/
書込
データ桁数
データ内容
コード
(フォーマット)
各パラメータを初期値に戻す
データに応じて通信用パラメータのクリア有無を選択可能
(○:クリアあり、×:クリアなし)
パラメータクリア、オールクリア、通信用パラメータについて
は、48ページ参照
8
パラメータクリア
オールクリア
書込
クリア種類
データ
パラメータ
H9696
○
クリア
H5A5A
×
パラメータ
H9966
○
オールクリア
H55AA
×
HFC
通信用パラメータ
4桁(A,C/D)
H9696、H9966でクリアを実行すると、通信関係のパラメータ設
定も初期値に戻るため、運転再開時には再度パラメータ設定が必要
クリアを実行すると命令コードHEC、HF3、HFFの設定もクリア
される
パスワード設定中は、H9966、H55AA(パラメータオールクリア)
のみ可能
9
H00∼
読出
H63
パラメータ
10
11
H80∼
書込
HE3
リンクパラメータ
読出
H7F
拡張設定
書込
HFF
読出
H6C
書込
HEC
第2パラメータ切換(
12
命令コード
HFF=1、9)
13
複数命令
機種名
書込/
読出
読出
H7C
機種名をASCIIコードで読出し可能
空白部分は、"H20"(空白コード)がセットされる
例) "FR-E720EX"の場合、
H46,H52,H2D,H45,H37,H32,H30,H45,H58,H20・・・H20
H7D
ドライブユニット容量をASCIIコードで読み出し可能
読出しデータは、0.1kW単位で、0.01kW単位は切り捨てる
空白部分は、"H20"(空白コード)がセットされる
例)
0.4K・・・"
4"(H20,H20,H20,H20,H20,H34)
0.75K・・・"
7"(H20,H20,H20,H20,H20,H37)
モニ
容量
読出
校正パラメータを設定する場合(校正パラメータは次ページ校正
パラメータ一覧参照)
H00: 速度(ゲイン速度は、Pr.125 (命令コードH99)、Pr.126 (命
令コードH9A)でも書込み可能)
H01: パラメータ設定されているアナログ値
H02: 端子から入力されているアナログ値
2種類の命令を書き込むことができ、読出しデータとして2種類
のモニタが可能(詳細は、198ページ参照 )
情報
タ
H00∼H09の設定によりパラメータ内容を切り換える
設定値の詳細は命令コード(48ページ参照) 参照
HF0
機種
14
命令コード(48ページ参照)を参照し、必要に応じて書込み、読出し
を行う
Pr.100 以後のパラメータ設定には、リンクパラメータ拡張設定が
必要
Pr.37 読出し、書込みデータフォーマットは、E2,A2になる
4桁(B,E/D)
6桁(B,E2/D)
4桁(A,C/D)
6桁(A2,C/D)
2桁(B,E1/D)
2桁(A1,C/D)
2桁(B,E1/D)
2桁(A1,C/D)
10桁
(A3,C1/D)
20桁
(B,E3/D)
6桁(B,E2/D)
4
データフォーマット(A,A1,A2,A3,B,C,C1,D,E,E1,E2,E3,F)については、188ページ を参照してください。
Pr.37 =“0.01∼9998”、Pr.144 =“2∼10”を設定し、命令コードHFFに“01”を設定すると、単位は0.001となりデータフォーマットはE2、
A2となります。
備 考
パラメータ設定値の“8888”は65520(HFFF0)、設定値“9999”は65535(HFFFF)と設定してください。
命令コードのHFF、HEC、HF3は、いったん書き込むと設定値は保持されますが、ドライブユニットリセットおよびオールク
リアで0となってしまいます。
例)局番0のドライブユニットからC3(Pr.902)、C6(Pr.904) の設定値を読み出す場合
計算機送信データ
①
②
③
④
ドライブユニット送信
データ
ENQ 00 FF 0 01 7D
ACK 00
ENQ 00 EC 0 01 79
ACK 00
ENQ 00 5E 0 0A
STX 00 0000 ETX 20
ENQ 00 60 0 F6
STX 00 0000 ETX 20
内 容
拡張リンクパラメータに“H01”を設定
第2パラメータ切換えに“H01”を設定
C3(Pr.902) 読出し。0%が読み出される。
C6(Pr.904) 読出し。0%が読み出される。
ドライブユニットリセットやパラメータクリアをした場合、C3(Pr.902) やC6(Pr.904) を読出し、書込みするには再度①から実行します。
195
パ
ラ
メ
|
タ
通信運転と設定
校正パラメータ一覧
パラメータ
命令コード
読出 書込 拡張
名 称
C2(902)
端子2速度設定バイアス速度
5E
DE
C3(902)
端子2速度設定バイアス
5E
DE
1
125(903) 端子2速度設定ゲイン速度
5F
DF
1
C4(903)
端子2速度設定ゲイン
5F
DF
1
C5(904)
端子4速度設定バイアス速度
60
E0
1
C6(904)
端子4速度設定バイアス
60
E0
1
126(905) 端子4速度設定ゲイン速度
61
E1
1
C7(905)
61
E1
1
端子4速度設定ゲイン
1
【特殊モニタ選択No】
モニタ内容の詳細については、136ページ 参照
データ
内 容
H01
回転速度/出力周波数/機械速度
H02
出力電流
H03
出力電圧
H05
回転速度設定値/周波数設定値機械速度
H08
H09
H0A
単位
0.01A
積算電力
位置指令【電子ギア前】(下位4桁)
1kWh
─
0.1V
H1B
位置指令【電子ギア前】(上位4桁)
─
1/0.01Hz/0.001
H1C
現在位置【電子ギア前】(下位4桁)
─
0.1V
H1D
現在位置【電子ギア前】(上位4桁)
─
0.1%
H1E
溜りパルス【電子ギア後】(下位4桁)
─
0.1%
H1F
溜りパルス【電子ギア後】(上位4桁)
0.01A
H24
理想速度指令
r/min
0.1V
H25
速度指令
r/min
0.01kW
H34
PID目標値
0.1%
─
H35
PID測定値
0.1%
─
H36
PID偏差
0.1%
H3D
モータサーマル負荷率
0.1%
H3E
ドライブユニットサーマル負荷率
H3F
積算電力2
電子サーマル負荷率
出力電流ピーク値
コンバータ出力電圧ピーク値
H10
内 容
H19
H1A
回生ブレーキ使用率
H0C
H0F
データ
コンバータ出力電圧
H0B
H0E
単位
1/0.01Hz/0.001
出力電力
入力端子状態
出力端子状態
H13
位置パルス
─
H14
積算通電時間
1h
H17
実稼動時間
H18
モータ負荷率
1h
0.1%
Pr.37 に“0.01∼9998”を設定し、命令コードHFFに“01”を設定するとデータフォーマットは6桁(E2)となります。
入力端子モニタ詳細
─
0.1%
0.01kWh
b15
─
─
─
─
─
RES
─
MRS
─
RH
RM
RL
─
─
STR
b0
STF
─
─
─
─
─
─
─
─
ABC
FU
─
─
─
b0
RUN
出力端子モニタ詳細
b15
─
─
【異常データ】
異常内容の詳細については、241ページ参照
データ
H00
H10
H11
H12
H20
H21
H22
H30
H31
H40
H52
H60
196
内容
異常なし
E.OC1
E.OC2
E.OC3
E.OV1
E.OV2
E.OV3
E.THT
E.THM
E.FIN
E.ILF
E.OLT
データ
H61
H70
H80
H81
H90
内容
E.SOT
E.BE
E.GF
E.LF
E.OHT
データ
HC5
HC7
HC8
HC9
HD0
内容
E.IOH
E.AIE
E.USB
E.SAF
E.OS
HA0
HA1
HB0
HB1
HB2
HB3
HC0
E.OPT
E.OP1
E.PE
E.PUE
E.RET
E.PE2
E.CPU
HD1
HD3
HDD
HF1
HF6
HF7
HFD
E.OSD
E.OD
E.OA
E.1
E.6
E.7
E.13
異常内容表示例(命令コードH74の場合)
読出しデータH3010の場合
(前回異常……THT) b15
b8b7
b0
(今回異常……OC1)
0 0 1 1 0 0 0 0 0 0 0 1 0 0 0 0
前回の異常
(H30)
今回の異常
(HA1)
通信運転と設定
【運転指令】
項目
命令コード
Bit長
内容
例
b0:電流入力選択(固定)
b1:正転指令(固定)
[例1] H02…正転
b7
b2:逆転指令(固定)
運転指令
0
b3:RL(低速指令(可変))
HFA
8bit
b4:RM(中速指令(可変))
0
0
0
b0
0
0
1
[例2] H00…停止
b7
b5:RH(高速指令(可変))
b6:第2機能選択(固定)
0
0
b0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
b7:MRS(出力停止(可変))
b0:電流入力選択(固定)
b1:正転指令(固定)
b2:逆転指令(固定)
b3:RL(低速指令(可変))
b4:RM(中速指令(可変))
b5:RH(高速指令(可変))
b6:第2機能選択(固定)
運転指令
(拡張)
HF9
16bit
b7:MRS(出力停止(可変))
[例1] H0002…正転
b15
0
0
0
0
0
b0
0
0
1
0
[例2] H0800…低速運転
(Pr.184 RES端子機能選択=“0”に設定した場合)
b8:─
b9:─
b15
b10:─
b11:RES(リセット(可変))、
0
b0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
b12:─
b13:─
b14:―
b15:―
信号は初期状態のものです。Pr.180∼Pr.184 (入力端子機能選択)(120ページ) の設定により内容が変更します。
信号は初期状態のものです。リセットはネットワークで制御することはできないので、初期状態では bit11 は無効になります。bit11 を使用する場合は、
Pr.184 RES端子機能選択 (120ページ) で信号を変更してください。(リセットは命令コードHFDにて実行可能です)
Pr.551 =“2”(PUモード指令権がPUコネクタ)のときは、正転指令、逆転指令のみ使用可能です。
【ドライブユニットステータスモニタ】
項目
命令コード
Bit長
内容
例
b0:RUN(ドライブユニット運転中(可変))
b1:正転中(固定)
ドライブ
b2:逆転中(固定)
ユニット
b3:速度到達(固定)
ステータス
H7A
8bit
[例1] H02…正転中
b7
0
b4:過負荷(固定)
0
0
0
b0
0
1
0
[例2] H80…異常発生で停止
b7
b0
b5:─
モニタ
0
b6:FU(速度検出(可変))
1
0
0
0
0
0
0
0
b7:ABC(異常(可変))
b0:RUN(ドライブユニット運転中(可変))
4
b1:正転中(固定)
b2:逆転中(固定)
b3:速度到達(固定)
b4:過負荷(固定)
b5:─
ドライブ
b6:FU(速度検出(可変))
ユニット
ステータス
モニタ
(拡張)
H79
16bit
b7:ABC(異常(可変))
b8:─
b9:─
b10:─
[例1] H0002…正転中
b15
0
0
0
0
0
b0
0
0
0
0
0
0
0
0
0
1
1
0
0
0
0
0
0
[例2] H8080…異常発生で停止
b15
1
0
0
0
0
0
0
0
0
b0
0
b11:─
b12:─
b13:─
b14:─
b15:異常発生(固定)
信号は初期状態のものです。Pr.190∼Pr.192 (出力端子機能選択 ) の設定により内容が変更します。
197
パ
ラ
メ
|
タ
通信運転と設定
【複数命令(HF0)】
計算機からドライブユニットへの送信データフォーマット
フォー
マット
1
ENQ
A3
2
3
4
5
ドライブユニット 命令コード
局番
(HF0)
6
7
キャラクタ数
9
10
11
8
送信 受信
待ち データ データ
時間 タイプ タイプ
12
13
データ1
14
15
16
17
18
サム
チェック
データ2
19
CR/
LF
ドライブユニットから計算機への受信データフォーマット(データ誤りなし)
フォー
マット
C1
1
STX
2
3
4
5
6
7
送信 受信 エラー エラー
ドライブユニット データ データ コード コード
タイプ タイプ
1
2
局番
8
キャラクタ数
9
10
11
データ1
13
14
データ2
15
16
ETX
17
18
サム
チェック
19
CR/
LF
送信データ(計算機からドライブユニットへ)のデータタイプを指定します。データタイプ4を指定する場合は、送受信ともデータタイプを4に設定してご
使用ください。
受信データ(ドライブユニットから計算機へ)のデータタイプを指定します。データタイプ4を指定する場合は、送受信ともデータタイプを4に設定してご
使用ください。
送信データのデータ1、データ2の組み合わせ
データタイプ
データ1
データ2
0
運転指令(拡張)
設定速度(RAM)
1
運転指令(拡張)
設定速度(RAM,EEPROM)
4
H00+モニタコード1
H00+モニタコード2
備考
運転指令(拡張)は、命令コードHF9と同一(197
ページ参照)
設定速度(周波数)は、Pr.37 に“0.01∼9998”
を設定し、命令コードHFFに“01”を設定して
も、常に4桁で1単位
モニタコード1、2 は、特殊モニタ選択Noを設定
(上位2桁は0を設定)
受信データのデータ1、データ2の組み合わせ
データタイプ
データ1
データ2
ドライブユニット
0
ステータスモニタ
回転速度(出力周波数)
(拡張)
1
ドライブユニット
ステータスモニタ
特殊モニタ
(拡張)
4
12
第1モニタ値
第2モニタ値
備考
ドライブユニットステータスモニタ(拡張)は、命
令コードH79と同一(197ページ参照)
回転速度(周波数)モニタは、Pr.37 に“0.01∼
9998”を設定し、命令コードHFFに“01”を
設定しても、常に4桁で1単位(小数点以下は、切
捨て)
特殊モニタは、命令コードHF3で指定されたモニ
タ内容を返信(196ページ参照)
第1、2モニタ値は、送信データタイプ4で指定さ
れたモニタ内容を返信
送信データタイプが4で無かった場合、第1モニ
タ値は電流モニタ、第2モニタは回転速度モニタ
の内容を返信
回転速度(周波数)モニタは、Pr.37 に“0.01∼
9998”を設定し、命令コードHFFに“01”を設
定しても、常に4桁で1単位(小数点以下は、切捨
て)
エラーコード1には、送信データ1に対するエラーコードがセットされ、エラーコード2は、送信データ2に対するエラーコードがセットされます。モード
エラー (HA)、命令コードエラー (HB)、範囲外エラー (HC)、正常時(HF)が返答されます。
198
通信運転と設定
4.18.6 Modbus-RTU通信仕様(Pr.117、Pr.118、Pr.120、Pr.122、Pr.343、Pr.502、Pr.549)
ドライブユニットのPUコネクタからModbus-RTU通信プロトコルを使用し、通信運転やパラメータ設定ができます。
パラメータ
番号
名 称
初期値
設定範囲
0
117
PU通信局番
内 容
マスタへの返答なし
ドライブユニットの局番指定
0
1∼247
1台のパソコンに複数台のドライブユニットを接
続する時に、ドライブユニットの局番を設定す
る。
通信速度
118
PU通信速度
192
48、96、192、384 設定値×100が通信速度になる。
例)96なら9600bps
0
120
PU通信パリティチェック
2
1
2
0
122
PU通信チェック時間間隔
0
パリティチェックなし
ストップビット長2bit
奇数パリティあり
ストップビット長1bit
偶数パリティあり
ストップビット長1bit
RS-485通信可能。ただし、指令権のある運転モー
ドにした瞬間に通信エラー (E.PUE)発生
交信チェック(断線検出)時間の間隔
0.1∼999.8s
無交信状態が許容時間以上継続すると、ドライブ
ユニットはアラーム停止する(Pr.502 による)。
9999
343
コミュニケーションエラーカ
ウント
0
−
0、3
502
549
通信異常時停止モード選択
プロトコル選択
0
0
交信チェック(断線検出)なし
Modbus-RTU通信時の通信エラーの回数を表示(
読出しのみ)
異常発生時 表示
異常出力
異常
解消時
フリーラン
停止
出力
停止
(E.PUE)
停止後出力
停止
(E.PUE)
出力なし
再始動
E.PUE
停止後
E.PUE
停止後
E.PUE
1
減速停止
2
減速停止
0
三菱インバータ(計算機リンク)プロトコル
1
Modbus-RTUプロトコル
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
マスタからアドレス0(局番0)としてModbus-RTU通信を行った場合、ブロードキャスト通信となりドライブユニットはマスタへ応答メッセージを送信し
ません。ドライブユニットからの返信が必要な場合は、Pr.117 PU通信局番 ≠ 0(初期値 0)としてください。ブロードキャスト通信では無効なファンクショ
ンがあります。(202ページ参照)
4
注 記
Pr.549 =“1”(Modbus-RTUプロトコル)、Pr.118 =“384”(38400bps) の設定にすると、パラメータユニット(FR-PU07)が
使用できなくなります。パラメータユニット(FR-PU07)を使用する場合は、操作パネルによってパラメータを変更してくだ
さい。
備 考
Modbus-RTUプロトコルを使用する場合、Pr.549 プロトコル選択 =“1”としてください。
NETモード指令権がPUコネクタのとき(Pr.550 NETモード操作権選択 =“2”または“9999”(初期値)で通信オプションな
し)、Modbus-RTU通信による運転ができます。(173ページ参照)
199
パ
ラ
メ
|
タ
通信運転と設定
(1)
通信仕様
通信仕様を下記に示します。
項 目
通信プロトコル
準拠規格
接続台数
通信速度
制御手順
通信方法
キャラクタ方式
スタートビット
ストップビット長
通信仕様
パリティチェック
エラーチェック
ターミネータ
待ち時間設定
(2)
内 容
Modbus-RTUプロトコル
EIA-485(RS-485)
1:N(最大32台)、設定は0∼247局
4800/9600/19200/38400bps選択可
調歩同期方式
半二重方式
Binary(8bit固定)
1bit
下記3種類から選択
パリティなし、ストップビット長2bit
奇数パリティ、ストップビット長1bit
偶数パリティ、ストップビット長1bit
CRCコードチェック
なし
なし
関連
パラメータ
Pr.549
Pr.117
Pr.118
Pr.120
概要
ModbusプロトコルはModicon社がPLC用に開発した通信プロトコルです。
Modbusプロトコルは専用のメッセージフレームを用いてマスターとスレーブ間にてシリアル通信を行います。専用の
メッセージフレームにはファンクションと呼ばれるデータ読出しや書込みができる機能があり、それを用いてドライブユ
ニットからパラメータの読出しや書込み、ドライブユニットの入力指令の書込みや運転状態の確認などを行うことができ
ます。本製品では、保持レジスタエリア(レジスタアドレス40001∼49999)に各ドライブユニットのデータを分類してお
ります。マスタは割り付けられた保持レジスタアドレスへアクセスすることでスレーブであるドライブユニットと交信す
ることができます。
備 考
シリアル伝送モードにはASCII(American Standard Code for Information Interchange)モードと RTU(Remote Terminal
Unit)モードの2種類がありますが、本製品では1バイト(8ビット)データをそのまま伝送するRTUモードのみ対応しておりま
す。
また、Modbusプロトコルで定義されているのは、通信プロトコルのみで、物理レイヤは規定されていません。
200
通信運転と設定
(3)
メッセージ形式
ドライブユニット応答時間
(データチェック時間は下表参照)
問合せ通信
シーケンサ(マスタ)
問合せメッセージ
(Query Message)
応答メッセージ
ドライブユニット(スレーブ)
データ無し時間 (Response Message)
(3.5バイト以上)
ブロードキャスト通信
シーケンサ(マスタ)
問合せメッセージ
(Query Message)
ドライブユニット(スレーブ)
無応答
(No Response)
データチェック時間
項 目
各種モニタ、運転指令、
速度設定(RAM)
パラメータ読出し/書込み、
速度設定(EEPROM)
チェック時間
<20ms
<50ms
パラメータクリア/オールクリア
<5s
リセット指令
返答なし
①問合せ(Query)
マスタが指定のあったアドレスのスレーブ(=ドライブユニット)に対してメッセージを送信します。
②正常応答(Normal Response)
マスタからの問合せを受信後、スレーブは要求されたファンクションを実行し、それに対応した正常応答をマスタへ返答
します。
③エラー返答(Error Response)
無効なファンクションコード、アドレス、データをスレーブが受信した場合、マスタへ返答します。
返答内容には、マスタからの要求ができない内容を示すエラーコードを付加して返答します。
H/Wが検出するエラー、フレームエラー、CRCチェックエラーについては返答できません。
④ブロードキャスト(Broadcast)
マスタはアドレス0を指定することで、スレーブ全てにメッセージを送信することができます。マスタから受信した全て
のスレーブは要求されたファンクションを実行します。この通信の場合、スレーブはマスタへ返答はしません。
備 考
ブロードキャスト通信時は、ドライブユニット局番設定(Pr.117) に関係なく実行します。
4
パ
ラ
メ
|
タ
201
通信運転と設定
(4)
メッセージフレーム(プロトコル)について
通信方法
基本的に、マスターはQuery message(質問)を送信し、スレーブはResponse message(レスポンス)を返答しま
す。正常通信時はDevice AddressとFunction Codeをそのままコピーし、異常通信(ファンクションコード、デー
タコードの不正)の場合はFunction Codeのbit7(=80h)をONし、Data Bytesはエラーコードを設定します。
Query message from Master
Device Address
Function Code
Device Address
Function Code
Eight-Bit
Eight-Bit
Data Bytes
Data Bytes
Error Check
Error Check
Response message from slave
メッセージフレームは上図にあるような4つのメッセージフィールドで構成されます。
3.5文字分のデータ無し時間(T1:スタート・完了)をメッセージデータの前後に付加することで、スレーブは1つのメッ
セージとして認識します。
プロトコルの詳細
以下に4つのメッセージフィールドについて説明します。
スタート
①アドレス
②ファンクション
③データ
④エラーチェック
完了
Start
ADDRESS
FUNCTION
DATA
CRC CHECK
End
T1
8bit
8bit
n×8bit
メッセージフィールド
L
H
8bit
8bit
T1
内容
1バイト長(8ビット)で0∼247を設定
①アドレスフィールド
0はブロードキャストメッセージ(全アドレス命令)、1∼247はスレーブ毎のメッセージを送信す
る場合に設定。スレーブからの返答時も、マスタより設定されたアドレスを返す。Pr.117 PU通信
局番 に設定した値がスレーブのアドレスになる
ファンクションコードは1バイト長(8ビット)で1∼255にて設定
マスターはスレーブに対して要求したいファンクション(機能)を設定し、スレーブはその要求され
た動作を行う。下表が対応できるファンクションコードで、下表以外のファンクションコードを設
定した場合はエラー応答となる
スレーブからの返答時、正常応答の場合はマスタより設定されたファンクションコードを返す。エ
ラー返答時はH80+ファンクションコードを返す
②ファンクション
フィールド
コード
ファンクション名
概要
ブロードキャスト
通信
H03
Read Holding Register
保持レジスタのデータを読み出す
不可
H06
Preset Single Register
保持レジスタへデータを書き込む
可能
H08
Diagnostics
機能診断(通信チェックのみ)
不可
H10
Preset Multiple
Registers
連続した複数の保持レジスタの書
込み
可能
H46
保持レジスタアクセスログ
読出し
前回交信して成功したレジスタ個
数の読出し
不可
表1:ファンクションコード一覧表
③データフィールド
ファンクションコードによりフォーマットが変化する(203ページ参照)
データにはバイトカウント、バイト数、保持レジスタへのアクセス内容などがある
受信したメッセージフレームの誤り検出を行う。CRCチェックにて行い2バイト長のデータが
メッセージの最後に追加される。メッセージにCRCを付加するときには、下位バイトが先に付加
④エラーチェック
フィールド
され、その後に上位バイトが続く。
CRC値は、CRCをメッセージに付加する送信側が計算する。受信側は、メッセージ受信中にCRC
を再計算して、その計算結果とエラーチェックフィールドに受信した実際の値と比較し、この2つ
の値が一致しない場合は、結果をエラーとする。
202
通信運転と設定
(5)
メッセージフォーマットの種類
202ページ 表1の各ファンクションコードに対応するメッセージフォーマットを説明します。
保持レジスタのデータ読出し(H03もしくは03)
保持レジスタエリア(レジスタ一覧(208ページ) を参照)に割り付けてある①システム環境変数 ②リアルタイムモ
ニタ ③アラーム履歴 ④ドライブユニットのパラメータの内容を読み出すことができます
問合せメッセージ(Query message)
①Slave Address
②Function
(8bit)
③Starting Address
④No. of Points
CRC Check
H03
H
L
H
L
L
H
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
正常応答(Response message)
①Slave Address
②Function
⑤Byte Count
H03
(8bit)
(8bit)
(8bit)
⑥Data
CRC Check
H
L
…
L
H
(8bit)
(8bit)
(n×16bit)
(8bit)
(8bit)
問合せメッセージの設定
メッセージ
設定内容
メッセージを送信するアドレス
①Slave Address:スレーブアドレス
ブロードキャスト通信不可(0は無効)
②Function:ファンクションコード
H03を設定
保持レジスタのデータ読出しを開始するアドレス
開始アドレス=開始レジスタアドレス(10進数)-40001
③Starting Address:開始アドレス
例えば、開始アドレス0001を設定したら保持レジスタ40002のデータを読み
出す
読み出す保持レジスタのレジスタ数
④No. of Points:読出し個数
読出し可能なレジスタ数は最大125
正常応答の内容
メッセージ
設定内容
設定範囲はH02∼HFA(2∼250)
⑤Byte Count
④で指定した読出し個数の2倍が設定される
④で指定されたデータ分が設定される
読出しデータはHiバイト、Loバイトの順で読み出され、開始アドレスのデー
⑥Data:読出しデータ
タ、開始アドレス+1のデータ、開始アドレス+2のデータの順に並べて設
定される
例)スレーブアドレス17(H11)より41004(Pr.4) ∼41006(Pr.6) のレジスタ値を読み出す。
問合せメッセージ(Query message)
Slave Address
Function
Starting Address
No. of Points
4
CRC Check
H11
H03
H03
HEB
H00
H03
H77
H2B
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
正常応答(Response message)
Slave Address
Function
Byte Count
H11
H03
H06
H17
H70
H0B
Data
HB8
H03
HE8
H2C
CRC Check
HE6
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
読出し値(周波数設定の場合)
レジスタ41004(Pr.4):H1770(60.00Hz)
レジスタ41005(Pr.5):H0BB8(30.00Hz)
レジスタ41006(Pr.6):H03E8(10.00Hz)
203
パ
ラ
メ
|
タ
通信運転と設定
保持レジスタのデータ書込み(H06もしくは06)
保持レジスタエリア(レジスタ一覧(208ページ) を参照)に割り付けてある①システム環境変数 ④ドライブユニッ
トのパラメータの内容を書き込むことができます。
問合せメッセージ(Query message)
①Slave Address
(8bit)
②Function
③Register Address
④Preset Data
CRC Check
H06
H
L
H
L
L
H
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
正常応答(Response message)
①Slave Address
(8bit)
②Function
③Register Address
④Preset Data
CRC Check
H06
H
L
H
L
L
H
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
問合せメッセージの設定
メッセージ
設定内容
メッセージを送信するアドレス
①Slave Address:スレーブアドレス
アドレス0にてブロードキャスト通信可能
②Function:ファンクションコード
H06を設定
保持レジスタへデータ書込みを行うアドレス
レジスタアドレス=保持レジスタアドレス(10進数)-40001
③RegisterAddress:レジスタアドレス
例えば、レジスタアドレス0001を設定したら保持レジスタアドレス40002へ
データを書き込む
保持レジスタへ書き込むデータ
④Preset Data
書込みデータは2バイト固定
正常応答の内容
正常応答の場合、①∼④(CRCチェック含む)問合せメッセージと同じ内容となります。
ブロードキャスト通信の場合、応答はなしとなります。
例)スレーブアドレス5(H05)の40014(運転速度RAM)に60Hz(H1770)を書き込む。(周波数設定の場合)
問合せメッセージ(Query message)
Slave Address
Function
H05
H06
H00
Register Address
H0D
H17
Preset Data
H70
H17
CRC Check
H99
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
正常応答(Response message)
問合わせメッセージと同一データ
注 記
ブロードキャスト通信の場合、問合せを実行しても応答はありませんので、次の問合せを行う場合は前の問合せを実
行後、ドライブユニットの処理時間分待った後問合せを行う必要があります。
204
通信運転と設定
機能診断(H08もしくは08)
問合せメッセージを送信し、返答メッセージは問合せメッセージをそのまま返信する(サブファンクションコード
H00の機能)ため、通信チェックができます。
サブファンクションコードH00(Return Query Data:問合せデータの返信)
問合せメッセージ(Query message)
①Slave Address
②Function
(8bit)
③Subfunction
④Data
CRC Check
H08
H00
H00
H
L
L
H
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
正常応答(Response message)
①Slave Address
②Function
(8bit)
③Subfunction
④Data
CRC Check
H08
H00
H00
H
L
L
H
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
問合せメッセージの設定
メッセージ
設定内容
メッセージを送信するアドレス
①Slave Address:スレーブアドレス
ブロードキャスト通信不可(0は無効)
②Function:ファンクションコード
H08を設定
③Subfunction
H0000を設定
データは2バイト長であれば任意に設定可能
④Data
設定範囲はH0000∼HFFFF
正常応答の内容
正常応答の場合、①∼④(CRCチェック含む)は問合せメッセージと同じ内容となります。
注 記
ブロードキャスト通信の場合、問合せを実行しても応答はありませんので、次の問合せを行う場合は前の問合せを実
行後、ドライブユニットの処理時間分待った後問合せを行う必要があります。
複数保持レジスタのデータ書込み(H10もしくは16)
複数の保持レジスタへデータを書き込むことができます。 問合せ(Query message)
①Slave
Address
②
Function
(8bit)
H10
(8bit)
④
No. of
Registers
③
Starting Address
H
(8bit)
L
(8bit)
H
(8bit)
L
(8bit)
⑤
ByteCount
(8bit)
⑥Data
H
(8bit)
L
(8bit)
CRC Check
…
(n×2×8bit)
L
(8bit)
H
(8bit)
正常応答(Response message)
①Slave Address
②Function
(8bit)
H10
(8bit)
③Starting Address
H
(8bit)
L
(8bit)
④No. of Registers
H
(8bit)
CRC Check
L
(8bit)
L
(8bit)
H
(8bit)
4
問合せメッセージの設定
メッセージ
①Slave Address:スレーブアドレス
②Function:ファンクションコード
設定内容
メッセージを送信するアドレス
アドレス0にてブロードキャスト通信可能
H10を設定
保持レジスタのデータ書込みを開始するアドレス
③Starting Address:開始アドレス
開始アドレス=開始レジスタアドレス(10進数)-40001
例えば、開始アドレス0001を設定したら保持レジスタ40002のデータを読み
出す
④No. of Points:書込み個数
⑤Byte Count
書き込む保持レジスタのレジスタ数
書込み可能なレジスタ数は最大125
設定範囲はH02∼HFA(2∼250)
④で指定した値の2倍を設定する
④で指定されたデータ分を設定
⑥Data:書込みデータ
書込みデータはHiバイト、Loバイトの順で設定し、開始アドレスのデータ、開
始アドレス+1のデータ、開始アドレス+2のデータの順に並べて設定する
205
パ
ラ
メ
|
タ
通信運転と設定
正常応答の内容
正常応答の場合、①∼④(CRCチェック含む)は問合せメッセージと同じ内容となります。
例)スレーブアドレス25(H19)の41007(Pr.7) に0.05s(H05)、41008(Pr.8) に0.10s(H0A)を書き込む。
問合せメッセージ(Query message)
Slave
Address
Starting
Function
No. of Points
Address
Byte
Data
Count
CRC Check
H19
H10
H03
HEE
H00
H02
H04
H00
H05
H00
H0A
H86
H3D
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
正常応答(Response message)
Slave
Address
Starting
Function
No. of Points
Address
CRC Check
H19
H10
H03
HEE
H00
H02
H22
H61
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
保持レジスタアクセスログ読出し(H46もしくは70)
ファンクションコードH03、H10での問合せに対応できます。
前回交信してアクセスに成功した保持レジスタの開始アドレスと成功したレジスタ数を返答します。
上記ファンクションコード以外の問合せについては、アドレス、個数ともに0を返答します。
問合せメッセージ(Query message)
①Slave Address
②Function
(8bit)
H46
(8bit)
CRC Check
L
(8bit)
H
(8bit)
正常応答(Response message)
①Slave Address
②Function
(8bit)
H46
(8bit)
③ Starting Address
H
(8bit)
L
(8bit)
④No. of Points
H
(8bit)
CRC Check
L
(8bit)
L
(8bit)
H
(8bit)
問合せメッセージの設定
メッセージ
設定内容
メッセージを送信するアドレス
①Slave Address:スレーブアドレス
ブロードキャスト通信不可(0は無効)
②Function:ファンクションコード
H46を設定
正常応答の内容
メッセージ
設定内容
アクセスに成功した保持レジスタの開始アドレスを返す
開始アドレス=開始レジスタアドレス(10進数)-40001
③Starting Address:開始アドレス
例えば、開始アドレス0001を返したらアクセスに成功した保持レジスタアドレ
スは40002
④No. of Points:書込み個数
アクセスに成功した保持レジスタのレジスタ数を返す
例)スレーブアドレス25(H19)から成功レジスタ開始アドレスと成功回数を読み出す。
問合せメッセージ(Query message)
Slave Address
Function
H19
H46
H8B
CRC Check
HD2
(8bit)
(8bit)
(8bit)
(8bit)
正常応答(Response message)
Slave Address
Function
H19
H10
H03
Starting Address
HEE
H00
H02
H22
H61
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
(8bit)
開始アドレス41007(Pr.7) の2個の成功が返答
206
No. of Points
CRC Check
通信運転と設定
エラー返答
マスタから受信した問合せ(Query)メッセージ中のファンクション、アドレス、データに不正があった場合、エラー
返答します。
パリティー、CRC、オーバーラン、フレーミング、Busyのエラーについては無返答となります。
注 記
ブロードキャスト通信の場合も無返答となります。
エラー返答(Response message)
①Slave Address
②Function
H80 + Function
(8bit)
(8bit)
③Exception Code
(8bit)
CRC Check
L
H
(8bit)
(8bit)
メッセージ
①Slave Address:スレーブアドレス
設定内容
マスタより受信したアドレスを設定
②Function:ファンクションコード
マスタより要求のあったファンクションコード+H80が設定される
③Exception Code:例外コード
下表にあるコードが設定される
エラーコード一覧
コード
01
02
03
エラー項目
ILLEGAL FUNCTION
(ファンクションコード不正)
ILLEGAL DATA ADDRESS
(アドレス不正)
ILLEGAL DATA VALUE
(データ不正)
エラー内容
マスタからの問合せメッセージにおいてスレーブが取り扱えないファンク
ションコードが設定された。
マスタからの問合せメッセージにおいてドライブユニットが取り扱えないレ
ジスタアドレスが設定された。
(パラメータ無し、パラメータ読出し不可、パラメータ書込み不可)
マスタからの問合せメッセージにおいてドライブユニットが取り扱えない
データが設定された。
(パラメータ書込み範囲外、モード指定あり、その他のエラー )
以下の場合は、エラーとなりません。
①ファンクションコードH03(保持レジスタのデータ読出し)
読出し個数(No. of Points)が1以上かつ、データ読出しが1つ以上可能な保持レジスタがある場合
②ファンクションコードH10(複数保持レジスタのデータ書込み)
書込み個数(No. of Points)が1以上かつ、データ書込みが1つ以上可能な保持レジスタがある場合
つまり、ファンクションコードH03もしくはH10を使用し、複数の保持レジスタにアクセスをおこなう場合は、存在しない保持レジスタ、また
は、読出し不可、書込み不可の保持レジスタにアクセスしてもエラーとはなりません。
備 考
アクセスした保持レジスタが全て存在しない場合は、エラーとします。
存在しない保持レジスタのデータ読出し値は0、書込みの場合はデータは無効となります。
4
メッセージデータの誤り検出
マスターからのメッセージデータの誤りについて下記内容のエラーを検出します。エラーを検出してもアラーム停
パ
ラ
メ
|
タ
止はしません。
エラーチェック項目
エラー項目
パリティーエラー
フレーミングエラー
オーバーランエラー
エラー内容
の指定(Pr.120 の設定)と異なっている
ドライブユニットにて受信したデータがストップ
ビット長の指定(Pr.120) と異なっている
ドライブユニットにてデータを受信完了する前に、
①エラー発生時にPr.343 に+1加算する。
次のデータがマスターから送られてきた
②エラー発生時、端子LFが出力される。
メッセージフレーム
メッセージフレームのデータ長をチェックし、受信
エラー
データ長が4byte未満であればエラーとする。
CRCチェックにてメッセージフレームのデータが計
CRCチェックエラー
ドライブユニット側の動作
ドライブユニットにて受信したデータがパリティー
算結果と不一致ならばエラーとする。
207
通信運転と設定
(6)
Modbusレジスタ
システム環境変数
レジスタ
定義
読出/書込
備考
40002
40003
40004
40006
40007
40009
40010
40014
40015
ドライブユニットリセット
パラメータクリア
パラメータオールクリア
パラメータクリア
パラメータオールクリア
ドライブユニット状態/制御入力命令
運転モード/ドライブユニット設定
運転速度(RAM値)
運転速度(EEPROM値)
書込
書込
書込
書込
書込
読出/書込
読出/書込
読出/書込
書込
書込み値は任意
書込み値はH965Aを設定ください
書込み値はH99AAを設定ください
書込み値はH5A96を設定ください
書込み値はHAA99を設定ください
下記参照
下記参照
Pr.37 の設定により、周波数と回転速度の切
<ドライブユニット状態/制御入力命令>
定義
制御入力命令
ドライブユニット状態
Bit
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
替可能回転速度は、1r/min単位となる
通信パラメータの設定値がクリアされません。
書込み時は制御入力命令としてデータを設定します。
読出し時はドライブユニット運転状態としてデータが読み出されます。
書込み時は運転モード設定としてデータを設定します。
読出し時は運転モード状態としてデータを読み出されます。
停止指令(固定)
正転指令(固定)
逆転指令(固定)
RH(高速指令(可変))
RM(中速指令(可変))
RL(低速指令(可変))
0
第2機能選択((固定)
電流入力選択((固定)
0
MRS(出力停止(可変))
0
RES(リセット (可変))
0
0
0
RUN(ドライブユニット運転中(可変))
正転中(固定)
逆転中(固定)
速度到達(固定)
過負荷(固定)
0
FU(速度検出(可変))
ABC(異常(可変))
0
0
0
0
0
0
0
異常発生(固定)
<運転モード/ドライブユニット設定>
モード
読出し値
書込み値
EXT
PU
EXT
JOG
PU
JOG
NET
PU+
EXT
H0000
H0001
H0010
─
H0002
─
H0003
─
H0004
H0014
H0005
─
運転モードによる制約は、計算機リンクの
仕様に準じます。
信号は初期状態のものです。Pr.180∼Pr.184 (入力端子機能選択)(120ページ) の設定により内容が変更します。
各割付け信号は、各々 NETでの有効/無効があります。(173ページ参照)
信号は初期状態のものです。Pr.190∼Pr.192 (出力端子機能選択)(126ページ) の設定により内容が変更します。
リアルタイムモニタ
モニタ内容の詳細については、136ページ 参照
レジスタ
単位
レジスタ
1/1/0.01Hz
40224
モータ負荷率
0.1%
出力電流
0.01A
40225
積算電力
1kWh
出力電圧
0.1V
40226
位置指令【電子ギア前】(下位4桁)
─
40227
位置指令【電子ギア前】(上位4桁)
─
40228
現在位置【電子ギア前】(下位4桁)
─
回転速度/機械速度/出力周波数
40202
40203
40205
回転速度設定値/機械速度設定値/
周波数設定値
1/1/0.01Hz
内 容
単位
40208
コンバータ出力電圧
0.1V
40229
現在位置【電子ギア前】(上位4桁)
─
40209
回生ブレーキ使用率
0.1%
40230
溜りパルス【電子ギア後】(下位4桁)
─
40210
電子サーマル負荷率
0.1%
40231
溜りパルス【電子ギア後】(上位4桁)
40211
出力電流ピーク値
0.01A
40236
理想速度指令
40212
コンバータ出力電圧ピーク値
40214
出力電力
40215
入力端子状態
40216
208
内 容
40201
出力端子状態
─
r/min
0.1V
40237
速度指令
r/min
0.01kW
40252
PID目標値
0.1%
─
40253
PID測定値
0.1%
─
40254
PID偏差
0.1%
40261
モータサーマル負荷率
0.1%
40262
ドライブユニットサーマル負荷率
0.1%
40263
積算電力2
─
40219
40220
位置パルス
積算通電時間
1h
40223
実稼動時間
1h
0.01kWh
通信運転と設定
Pr.37 =“0.01∼9998”の時、1単位になります。
入力端子モニタ詳細
b15
─
─
─
─
─
RES
─
MRS
─
RH
RM
RL
─
─
STR
b0
STF
─
─
─
─
─
─
─
─
ABC
FU
─
─
─
b0
RUN
出力端子モニタ詳細
b15
─
─
パラメータ
パラメータ
0∼999
C2(902)
レジスタ
41000∼
41999
パラメータ名称
読出/書込
パラメータ名称はパラメータ一
覧(48ページ)参照
読出/書込
41902
端子2速度設定バイアス速度
(速度)
読出/書込
42092
端子2速度設定バイアス
(アナログ値)
読出/書込
43902
端子2速度設定バイアス
(端子アナログ値)
41903
端子2速度設定ゲイン速度
(速度)
読出/書込
42093
端子2速度設定ゲイン
(アナログ値)
読出/書込
43903
端子2速度設定ゲイン
(端子アナログ値)
41904
端子4速度設定バイアス速度
(速度)
読出/書込
42094
端子4速度設定バイアス
(アナログ値)
読出/書込
43904
端子4速度設定バイアス
(端子アナログ値)
41905
端子4速度設定ゲイン速度
(速度)
読出/書込
42095
端子4速度設定ゲイン
(アナログ値)
読出/書込
43905
端子4速度設定ゲイン
(端子アナログ値)
読出
C3(902)
125(903)
C4(903)
C5(904)
C6(904)
126(905)
C7(905)
読出
読出
読出
備考
パラメータ番号+41000がレジスタ番号
C3(902) に設定されているアナログ値(%)が読み出
される
端子2に印加されている電圧のアナログ値(%)が読
み出される
C4(903) に設定されているアナログ値(%)が読み出
される
端子2に印加されている電圧のアナログ値(%)が読
み出される
C6(904) に設定されているアナログ値(%)が読み出
される
端子4に印加されている電流(電圧)のアナログ値
(%)が読み出される
C7(905) に設定されているアナログ値(%)が読み出
される
端子4に印加されている電流(電圧)のアナログ値
(%)が読み出される
アラーム履歴
レジスタ
40501
40502
40503
40504
40505
40506
40507
40508
定義
読出/書込
アラーム履歴1
アラーム履歴2
アラーム履歴3
アラーム履歴4
アラーム履歴5
アラーム履歴6
アラーム履歴7
アラーム履歴8
読出/書込
読出
読出
読出
読出
読出
読出
読出
備考
データは2byteのため“H00○○”で格納される
下位1byteにエラーコードを参照可能
レジスタ40501にて書込みを行うことでアラーム
履歴一括クリアとなる
4
データは任意の値を設定する
アラームコード一覧
データ
H00
H10
H11
H12
H20
H21
H22
H30
H31
内容
異常なし
E.OC1
E.OC2
E.OC3
E.OV1
E.OV2
E.OV3
E.THT
E.THM
データ
H40
H52
H60
H61
H70
H80
H81
H90
HA0
内容
E.FIN
E.ILF
E.OLT
E.SOT
E.BE
E.GF
E.LF
E.OHT
E.OPT
データ
HA1
HB0
HB1
HB2
HB3
HC0
HC5
HC7
HC8
内容
E.OP1
E.PE
E.PUE
E.RET
E.PE2
E.CPU
E.IOH
E.AIE
E.USB
データ
HC9
HD0
HD1
HD3
HDD
HF1
HF6
HF7
HFD
パ
ラ
メ
|
タ
内容
E.SAF
E.OS
E.OSD
E.OD
E.OA
E.1
E.6
E.7
E.13
異常内容の詳細については、241ページ参照
209
通信運転と設定
機種情報モニタ
レジスタ
定義
読出/書込
備考
機種名をASCIIコードで読出し可能
44001∼44010
機種名
空白部分は、"H20"(空白コード)がセットされます。
読出
例)"FR-E720EX"の場合、
H46,H52,H2D,H45,H37,H32,H30,H45,H58,H20・・・H20
ドライブユニット容量をASCIIコードで読み出し可能
読出しデータは、0.1kW単位で、0.01kW単位は切り捨てる
44011∼44013
容量
読出
空白部分は、"H20"(空白コード)がセットされます。
例)
0.75K・・・"
7"(H20,H20,H20,H20,H20,H37)
Pr.343 コミュニケーションエラーカウント
(7)
通信エラーが発生した累積回数を確認することができます。
パラメータ
設定範囲
最小設定範囲
初期値
343
(読出しのみ)
1
0
注 記
通信エラー発生回数は、一時的にRAMに記憶されます。EEPROMに記憶されないため
電源リセットおよびドライブユニットリセットを行うと、値は消去され0となります。
(8)
出力信号LF“軽故障出力(通信エラー警報)”
通信エラー中は、オープンコレクタ出力にて軽故障信号(LF信号) を出力します。使用端子はPr.190∼Pr.192(出力端子
機能選択) にて割り付けてください。
マスタ
異常データ
異常データ
正常データ
異常データ
正常データ
返答データ
スレーブ
返答データ
カウントアップはしない
コミュニケーション
エラーカウント
(Pr.343)
信号LF
0
OFF
1
2
OFF
ON
ON
OFF
正常データ受信したらOFFする
コミュニケーションエラーカウントの
カウントアップは信号LFの立上りエッジ
に同期する
異常データ:通信エラーが発生するデータ。
注 記
LF信号は、Pr.190∼Pr.192 により、出力端子に割り付けることができます。端子割付の変更を行うと、他の機能に影響を与え
ることがあります。各端子の機能を確認してから設定を行ってください。
210
特殊な運転や回転速度制御
4.19 特殊な運転や回転速度制御
目的
設定が必要なパラメータ
ポンプ流量や風量などのプロセス制御
をする。
回転速度の自動調整によって回生によ
る過電圧アラームを回避する。
PID制御
回生回避機能
参照ページ
Pr.127∼Pr.134
211
Pr.882、Pr.883、Pr.885、Pr.886
218
4.19.1 PID制御(速度制御)(Pr.127∼Pr.134)
ドライブユニットで流量、風量または圧力などのプロセス制御を行うことができます。
端子2入力信号あるいは、パラメータ設定値を目標とし、端子4入力信号をフィードバック量としてフィードバック系
を構成しPID制御します。
パラメータ
番号
127
名 称
PID制御自動切換速度
初期値
9999
設定範囲
0∼4800r/min 自動的にPID制御に切り換わる速度
9999
0
128
PID動作選択
0
内 容
PID制御自動切換機能なし
PID動作しない
20
PID逆動作 測定値(端子4)
21
PID正動作 目標値(端子2または、Pr.133)
50
PID逆動作 偏差値信号入力
51
PID正動作 (CC-Link通信)
60
PID逆動作 測定値、目標値入力
61
PID正動作 (CC-Link通信)
比例帯が狭い(パラメータの設定値が小さい)と測定値のわ
ずかな変化で操作量が大きく変化する
129
PID比例帯
100%
0.1∼1000%
よって、比例帯が狭くなるに従って応答感度(ゲイン)はよ
くなるが、ハンチング発生などの安定性が悪くなる
ゲインKp=1/比例帯
9999
比例制御なし
偏差ステップ入力の場合、積分(I)動作のみで比例(P)動作
130
PID積分時間
1s
0.1∼3600s
と同じ操作量を得るのに要する時間(Ti)
積分時間が短くなるに従って、目標値への到達は早くなる
がハンチングを生じやすくなる
9999
積分制御なし
上限値
131
PID上限リミット
9999
0∼100%
フィードバック量が設定を超えると、FUP信号を出力する
測定値(端子4)の最大入力(20mA/5V/10V)が100%に相当
する
9999
機能なし
下限値
132
PID下限リミット
9999
0∼100%
測定値が設定範囲を下回った場合に、FDN信号を出力する
測定値(端子4)の最大入力(20mA/5V/10V)が100%に相当
4
する
9999
133
PID動作目標値
9999
機能なし
0∼100%
PID制御時の目標値
9999
端子2入力が目標値
偏差ランプ入力の場合、比例動作(P)のみの操作量を得るの
134
PID微分時間
9999
0.01∼10.00s
に要する時間(Td)
微分時間が大きくなるに従って、偏差の変化に対して大き
く反応する
9999
微分制御なし
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
Pr.129、Pr.130、Pr.133、Pr.134 は、運転中にも設定可能です。また、運転モードに関わらず設定可能です。
3000r/min を超えた値を設定しても、回転速度は3000r/minで制限されます。
211
パ
ラ
メ
|
タ
特殊な運転や回転速度制御
(1)
PID制御基本構成
Pr.128 =“20、21”(測定値入力)
ドライブユニット回路
Pr.133または
端子2
目標値
DC0∼5V
(0∼10V)
PID演算
+-
1
Kp 1+ Ti×S +Td×S
モータ
操作量
M
端子4
フィードバック信号(測定値) DC4∼20mA(0∼5V、0∼10V)
Kp:比例定数 Ti:積分時間 S:演算子 Td:微分時間
(2)
PID動作概要
①PI動作
PI動作は、比例動作(P)と積分動作(I)を組み合わせたもので、偏差の
大きさや時間的な推移変化に応じた操作量を与える動作をいいます。
偏差 目標値
測定値
[測定器がステップ状に変化したときの動作例]
P動作
時間
(注)PI動作は、PおよびI動作が加算された動作となります。
I動作
時間
PI動作
時間
②PD動作
PD動作は、比例動作(P)と微分動作(D)を組み合わせたもので、偏差
目標値
の速度に応じた操作量を与える動作を行い、過渡特性を改善します。
偏差
[測定器が比例的に変化したときの動作例]
測定値
P動作
時間
(注)PD動作は、PおよびD動作が加算された動作となります。
D動作
時間
PD動作
時間
③PID動作
PID動作は、PI動作とPD動作を組み合わせたもので、各々の動作の長所を
取り入れた制御が可能となります。
目標値
偏差
(注)PID動作は、PおよびIおよびD動作、全てが加算された動作となります。
測定値
P動作
I動作
D動作
時間
時間
時間
y=at2 +bt+c
PID動作
212
時間
特殊な運転や回転速度制御
④逆動作
偏差X=(目標値−測定値)が正のとき、操作量(回転速度)を増し、偏差が負のとき操作量を減らします。
偏差
目標値
〔暖房の場合〕
+
目標値
X>0
X<0
さむい→大きく
あつい→小さく
−
フィードバック信号
(測定値)
測定値
⑤正動作
偏差X=(目標値−測定値)が負のとき、操作量(回転速度)を増し、偏差が正のとき操作量を減らします。
測定値
〔冷房の場合〕
目標値
+
X>0
X<0
−
フィードバック信号
(測定値)
目標値
冷えすぎ→小さく
あつい→大きく
偏差
偏差と操作量(回転速度)の関係
偏 差
正
負
逆動作
正動作
(3)
結線例
シンクロジック
ドライブユニット
Pr.128 =20
NFB
Pr.182 =14
電源
Pr.190 =15
Pr.191 =14
U
V
W
R/L1
S/L2
T/L3
モータ
ポンプ
M
P
Pr.192 =16
正転
STF
逆転
STR
PID制御選択
RH(X14)*3
SD
*2(FUP)RUN
*2(FDN)FU
10
設定器
(目標値設定)
2線式
の場合
上限リミット
検出器
3線式
の場合
下限リミット
−
+
+−
4
+
2
5
SE
出力信号コモン
パ
ラ
メ
|
タ
(OUT)(COM)(24V)
4*4
(測定値)4∼20mA
0 24V
電源
*1
AC1φ
200/220V 50/60Hz
電源は、検出器の電源仕様に合わせて準備してください。
使用する出力信号端子は、Pr.190∼Pr.192 (出力端子機能選択) の設定により異なります。
使用する入力信号端子は、Pr.178∼Pr.184 (入力端子機能選択) の設定により異なります。
AU信号を入力する必要はありません。
213
特殊な運転や回転速度制御
(4)
入出力信号とパラメータ設定
PID制御を行うには、Pr.128 =“20、21、50、51、60、61”としてください。
Pr.178∼Pr.184(入力端子機能選択) のいずれかに“14”を設定し、PID制御選択信号(X14)を割り付け、X14信号をON
してください。
X14信号が割り付けられていない場合は、Pr.128 の設定だけでPID制御が有効になります。
目標値をドライブユニットの端子2または、Pr.133 で入力し、測定値をドライブユニットの端子4に入力してください。
備 考
Pr.128 =“0”またはX14-OFFの場合は、PID動作を行わず、通常のドライブユニット運転となります。
RS-485通信など、ネットワーク経由でX14信号を割り付けた端子のbitをON/OFFすることにより、PID制御可能です。
信号
使用端子
Pr.178 ∼ Pr.184
X14
による
機 能
PID制御選択
内 容
PID制御を行うときX14信号をONしま
す。
PID制御の目標値を入力します。
2
入
2
PU
目標値入力
目標値入力
力
0∼5V........ 0∼100%
0∼10V ..... 0∼100%
操作パネル、パラメータユニットから目
標値(Pr.133) を設定します。
検出器からの信号(測定値信号)を入力し
ます。
4
4
測定値入力
偏差値入力
通信
目標値、測定値入力
上限リミット出力
FUP
パラメータ設定
Pr.178∼Pr.184 のいずれかに14を設定
Pr.128 =20、21、
Pr.133 =9999
Pr.73 =1、11
Pr.73 =0、10
Pr.128 =20、21、
Pr.133 =0∼100%
Pr.128 =20、21
4∼20mA .. 0∼100%
Pr.267 =0
0∼5V........ 0∼100%
Pr.267 =1
Pr.267 =2
0∼10V ..... 0∼100%
CC-Link通信から偏差値を入力します。 Pr.128 =50、51
CC-Link通信から目標値と測定値を入
Pr.128 =60、61
力します。
Pr.128 =20、21、60、61
測定値信号が上限値(Pr.131) を超えたと
き出力します。
Pr.131 ≠9999
Pr.190∼Pr.192 のいずれかに15
または、115を設定
FDN
出
Pr.190 ∼ Pr.192 下限リミット出力
による
とき出力します。
Pr.128 =20、21、60、61
Pr.132 ≠9999
Pr.190∼Pr.192 のいずれかに14
または、114を設定
力
正転(逆転)方向出
RL
力
PID
SE
測定値信号が下限値(Pr.132) を下回った
SE
パラメータユニットの出力表示が正転
(FWD) の と き「Hi」、逆 転(REV)、停 止
(STOP)のとき「Low」を出力します。
PID制御動作中
PID制御中にONします。
出力端子コモン
オープンコレクタ出力端子のコモン端
子
X14信号を割り付けていない場合は、Pr.128 の設定だけでPID制御します。
網掛け部分は、パラメータ初期値を示します。
Pr.190∼Pr.192 のいずれかに16
または、116を設定
Pr.190∼Pr.192 のいずれかに47
または、147を設定
CC-Link通信による設定方法は、CC-Link通信オプション(FR-A7NC Eキット)取扱説明書を参照してください。
Pr.190∼Pr.192 (出力端子機能選択) にて、100以上の設定は、端子出力が負論理となります。(詳細は、126ページ参照)
注 記
Pr.178∼Pr.184、Pr.190∼Pr.192 にて端子機能の変更を行うと、他の機能に影響を与えることがあります。各端子の機能を
確認してから設定を行ってください。
Pr.267 の設定を変更した場合は、電圧/電流入力切換スイッチの設定を確認してください。設定が異なると異常、故障、誤動
作の原因になります。(設定については、147ページ参照)
214
特殊な運転や回転速度制御
(5)
PID自動切換制御(Pr.127)
始動時のみPID制御せずに立ち上げることができます。
Pr.127 PID制御自動切換速度 に速度を設定すると、始動から回転速度がPr.127 設定速度に到達するまで、PID制御せず
に立上ります。一度PID制御運転に入ってからは、回転速度がPr.127 設定速度以下になっても、PID制御を継続します。
回転速度
PID制御なし
PID制御
Pr.127
時間
STF
PID
(6)
PIDモニタ機能
操作パネルにPID制御目標値、測定値、偏差の値を表示し、端子FMから出力することができます。
偏差モニタには、0%を1000としてマイナス%を整数値で表示することができます。(偏差モニタは、端子FMからの出
力できません。)
各モニタは、Pr.52 DU/PUメイン表示データ選択、Pr.54 FM端子機能選択 に下記設定値を設定してください。
設定値
最小単位
端子FMフルスケール
備考
52
53
PID目標値
PID測定値
モニタ内容
0.1%
100%
0.1%
100%
54
PID偏差値
0.1%
Pr.54 には設定できません。
PID偏差0%時1000と表示します。
4
パ
ラ
メ
|
タ
215
特殊な運転や回転速度制御
(7)
調整手順
パラメータの設定
端子の設定
X14信号をONする
Pr.127∼Pr.134 のPID制御パラメータを調整する
PID制御用の入出力端子を設定する(Pr.178∼Pr.184 (入力端
子機能選択)、Pr.190∼Pr.192 (出力端子機能選択))
X14信号を割り付けていない場合は、Pr.128 ≠“0”だけで
PID動作します。
運転
(8)
校正例
(0℃で4mA、50℃で20mAの検出器を用いて、PID制御により室温を25℃に調整する。
目標値は、ドライブユニットの端子2-5間(0-5V)に与えるようにしています。)
スタート
目標値の決定
調整したいものの目標値を決
定する。
目標値の%換算
目標値が検出器出力の何%に
相当するか計算する。
校正をする。
目標値のセット
目標値%に合わせて端子2-5間
に電圧を入力する。
運 転
比例帯(Pr.129)を大きめ、積分
時間(Pr.130)を長め、微分時間
(Pr.134)を「9999」(機能しな
い)にセットし、始動信号をON
する。
設定値は
安定しているか?
……室温を25℃にする。
Pr.128を設定して、X14信号をONにしてPID制御できるようになる。
……検出器仕様
0℃→4mA、50℃→20mAを用いる場合、4mAを0%、20mAを100%として、目標
値25℃は50%となる。
……目標設定入力(0∼5V)、検出器出力(4∼20mA)の校正が必要な場合には、下
記の校正*を行ってください。
……目標値を50%とする場合
端子2の仕様は0%→0V、100%→5Vより50%は2.5Vを端子2に入力する。
…… パラメータユニットによる運転の場合、Pr.133に目標値(0∼100%)を入力
してください。
運転の際には最初比例帯(Pr.129)を大きめ、積分時間(Pr.130)を長め、微
分時間(Pr.134)を「9999」(機能しない)にセットし、システムの動きを
見ながら、比例帯(Pr.129)を小さく、積分時間(Pr.130)を大きくしていき
ます。応答の遅いシステムでは、微分制御(Pr.134)を使用して徐々に大き
くしていきます。
Yes
No
パラメータ調整
測定値が安定するように、比例
帯(Pr.129)を大きく積分時間
(Pr.130)を長めに、微分時間
(Pr.134)を短めに変更する。
パラメータの最適化
運転状態全般を通し、測定値が安定
している間は、比例帯(Pr.129)を小
さく、積分時間(Pr.130)を短く、微
分時間(Pr.134)を長くしても可。
調整終了
*校正が必要な場合→校正Pr.902およびPr.903(端子2)または、Pr.904およびPr.905(端子4)に
て、検出器出力および目標設定入力の校正をします。
校正はドライブユニット停止中のPUモードにて行います。
216
特殊な運転や回転速度制御
<目標値入力の校正>
1.端子2-5間に目標値設定0%の入力(例:0V)を印加する。
2.C2(Pr.902) に偏差が0%時にドライブユニットが出力すべき速度(例:0r/min)を入力してください。
3.C3(Pr.902) に0%時の電圧値を設定します。
4.端子2-5間に目標値設定100%入力(例:5V)を印加する。
5.Pr.125 に偏差が100%時にドライブユニットが出力すべき速度(例:3000r/min)を入力してください。
6.C4(Pr.903) に100%時の電圧値を設定します。
<測定値入力の校正>
1.端子4-5間に測定値0%の入力(例:4mA)を印加する。
2.C6(Pr.904) にて校正を行う。
3.端子4-5間に測定値100%の入力(例:20mA)を印加する。
4.C7(Pr.905) にて校正を行う。
備 考
C5(Pr.904)、Pr.126 で設定する速度は、C2(Pr.902)、Pr.125 にて設定した速度とそれぞれ同じ値にしてください。
以上のような校正を行った結果は下図のようになります。
〔測定値〕
〔目標値の設定〕
〔操作量〕
操作量(r/min)
(%)
100
(%)
100
3000
0
0
0
5
(V)
0
0
4
20 (mA)
0
100
偏差(%)
注 記
位置制御時、PID制御は無効です。
X14信号がONの状態でも、RH、RM、RL信号(多段速運転)やJOG信号(JOG信号2)(JOG運転)を入力すると、PID制御をやめ
て多段速運転またはJOG運転を行います。
Pr.79 運転モード選択 =“6”(スイッチオーバモード)の場合は、PID制御は無効になります。
Pr.178∼Pr.184、Pr.190∼Pr.192 にて端子機能の変更を行うと、他の機能に影響を与えることがあります。各端子の機能を
確認してから設定を行ってください。
PID制御を選択時には、下限速度はPr.902 の速度、上限速度はPr.903 の速度になります。
(Pr.1 上限設定、Pr.2 下限設定 の設定も有効です。)
PID運転中は、遠隔操作機能は無効です。
通常運転中にPID制御に切り換えた場合は、運転時の速度は引き継が
PID目標値
ず0r/minを基準としてPID演算された速度指令値となります。
速度指令
通常時速度指令
PID動作
通常運転
ON
PID運転
通常運転
通常運転中にPID制御に切り換えた場合の動作例
参照パラメータ
Pr.59 遠隔機能選択 105ページ参照
Pr.73 アナログ入力選択 147ページ参照
Pr.79 運転モード選択 165ページ参照
Pr.178∼Pr.184 (入力端子機能選択) 120ページ参照
Pr.190∼Pr.192 (出力端子機能選択) 126ページ参照
C2(Pr.902)∼C7(Pr.905) 速度設定電圧(電流)バイアス・ゲイン 152ページ参照
217
4
パ
ラ
メ
|
タ
特殊な運転や回転速度制御
4.19.2 回生回避機能(Pr.665、Pr.882、Pr.883、Pr.885、Pr.886)
回生状態を検出し、速度を上昇させることで回生状態を回避することができます。
同一ダクト内の他のファンにより回されるつれ回り状態でも、回生運転にならないように速度を自動的に上昇させ
て連続運転することができます。
パラメータ
名 称
番号
882
初期値
回生回避動作選択
設定範囲
0
内 容
0
回生回避機能無効
1
常時回生回避機能有効
2
定速時のみ回生回避機能有効
回生回避動作する母線電圧レベル
883
回生回避動作レベル
DC400V
300∼800V
母線電圧レベルを低く設定した場合、過電圧エラーになりに
くくなるが、実減速時間は延びてしまう
設定値は、電源電圧× 2 より高くする
885
886
回生回避補正速度制限
値
回生回避電圧ゲイン
180r/min
0∼540r/min 回生回避機能が動作したとき上昇する速度の制限値
9999
100%
0∼200%
速度制限無効
回生回避動作時の応答性
設定値を大きくすると母線電圧変化に対する応答はよくなる
665
回生回避速度ゲイン
100%
0∼200%
が、回転速度が不安定になることがある
Pr.886 の設定値を小さくしても振動が抑えられない場合、
Pr.665 の設定値を小さくする
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
回生回避動作とは? (Pr.882、Pr.883)
(1)
回生状態が大きい場合、直流母線電圧が上昇し、過電圧アラーム(E.OV□)になることがあります。
この母線電圧の上昇を検出し、母線電圧レベルがPr.883 以上になった場合、速度を上げることで、回生状態を回避する
ことができます。
回生回避動作は、Pr.882 =“1”に設定すると常に動作し、Pr.882 =“2”に設定すると定速時のみ動作します。
定速時の回生回避動作例
加速時の回生回避動作例
母
線
電
圧
(DCV)
母
線
Pr.883
電
圧
(DCV)
Pr.883
時間
回
転
速
度
(r/min)
回生回避機能動作中
時間
回
転
速
度
(r/min)
時間
回生回避機能動作中
時間
減速時の回生回避動作例
母
Pr.883
線
電
圧
(DCV)
回
転
速
度
(r/min)
時間
回生回避機能動作中
時間
備 考
回生回避動作で上昇、下降させる速度の傾きは、回生状態によって変化します。
ドライブユニットの直流母線電圧は、通常入力電圧の約 2 倍程度になります。
入力電圧AC220Vの場合、母線電圧は約DC311V
ただし、入力電源波形により上下します。
Pr.883 の設定値が直流母線電圧レベル以下にならないようにしてください。非回生状態でも、回生回避機能が動作し、速度
が上昇します。
過電圧ストール(
)は、減速中のみ動作し、回転速度が下降するのを止めるのに対し、回生回避機能は常時動作(Pr.882
=“1”)、または定速時のみ動作(Pr.882 =“2”)し、回生量により速度を上昇させます。
218
特殊な運転や回転速度制御
(2)
回生回避動作速度を制限する(Pr.885)
回生回避動作で補正(上昇)する回転速度に制限を設けることができま
回
転
速
度
(r/min)
制限レベル
回転速度(r/min)
Pr.885 回生回避補正速度制限値 となります。
減速中に回生回避動作によって上昇した速度が制限値を越えた場合
Pr.885
Pr.885/2
時間
(3)
す。
速度の制限は、加速中、定速中は回転速度(回生回避動作前の速度)+
は、回転速度がPr.885 の1/2になるまで制限値を保持します。
回生回避動作によって上昇した速度が、Pr.1 上限設定 にかかった場
合は、上限速度で制限します。
Pr.885 =“9999”にすると、回生回避動作速度制限は無効です。
回生回避動作の調整(Pr.665、Pr.886)
回生回避動作時に速度が不安定になる場合は、Pr.886 回生回避電圧ゲイン の設定値を小さくしてください。逆に急激な
回生が発生し、過電圧アラームになるような場合は、設定値を大きくしてください。
Pr.886 を小さくしても振動が抑えられない場合は、Pr.665 回生回避速度ゲイン の設定値を小さくしてください。
注 記
回生回避動作時は、
(過電圧失速)を表示し、OL信号を出力します。
回生回避動作時もトルク制限は有効です。
回生回避機能では、モータが停止する実減速時間を短くすることはできません。実減速時間は回生エネルギー消費能力に
よって決まりますので、減速時間を短くする場合は、回生ユニット(FR-BU2、FR-CV、FR-HC2)やブレーキ抵抗器(MRS形、
FR-ABRなど)を検討してください。
定速時の回生エネルギーを消費するために、回生ユニット(FR-BU2、FR-CV、FR-HC2)やブレーキ抵抗器(MRS形、FR-ABR
など)を使用する場合は、Pr.882 =“0(初期値)”(回生回避機能無効)としてください。減速時の回生エネルギーを回生ユ
ニットなどで消費するときは、Pr.882 =“2”(定速時のみ回生回避機能有効)としてください。
回生回避動作時は、Pr.156 のOL信号出力の項目は、
も
(過電圧失速)も対象になります。また、Pr.157 OL信号出力タイマ
(過電圧失速)の対象となります。
参照パラメータ
Pr.1 上限設定 98ページ参照
Pr.8 減速時間 108ページ参照
Pr.22 トルク制限動作レベル 95ページ参照
4
パ
ラ
メ
|
タ
219
便利な機能
4.20 便利な機能
目的
設定が必要なパラメータ
部品のメンテナンス時期を知りたい
自由に使用できるパラメータ
任意のアラームを発生させたい
ドライブユニット部品寿命表示
メンテナンス出力機能
電流平均値モニタ信号
フリーパラメータ
任意アラーム書込み
参照ページ
Pr.255∼Pr.259
Pr.503、Pr.504
Pr.555∼Pr.557
Pr.888、Pr.889
Pr.997
220
223
224
226
227
4.20.1 ドライブユニット部品の寿命表示(Pr.255∼Pr.259)
制御回路コンデンサ、主回路コンデンサ、冷却ファン、突入電流抑制回路の劣化度合いをモニタで診断できます。
各部品の寿命が近づくと自己診断で警報出力できるため、トラブルを未然に防ぐことができます。
(ただし、本機能による寿命診断は、主回路コンデンサ以外は理論算定のため、目安として利用してください)
主回路コンデンサの寿命診断は、(4)に示す測定方法を実施しないと、警報信号(Y90)を出力しません。
パラメータ
名 称
番号
初期値
設定範囲
0
(0∼15)
内 容
制御回路コンデンサ、主回路コンデンサ、突入電
255
寿命警報状態表示
流抑制回路の各部品が寿命警報出力レベルに到達
したかどうかを表示(読出しのみ)
256
突入電流抑制回路寿命表示
100%
(0∼100%)
257
制御回路コンデンサ寿命表示
100%
(0∼100%)
258
主回路コンデンサ寿命表示
100%
(0∼100%)
突入電流抑制回路の劣化度合いを表示。
(読出しのみ)
制御回路コンデンサの劣化度合いを表示。
(読出しのみ)
主回路コンデンサの劣化度合いを表示。
(読出しのみ)
Pr.259 により測定実施した値を表示。
“1”を設定し、電源OFFすると主回路コンデンサ
259
主回路コンデンサ寿命測定
0
0、1
(2、3、8、9)
寿命の測定を開始。
電源再投入して、Pr.259 の設定値が“3”になっ
ていれば、測定完了。
Pr.258 に劣化度合いを書き込む
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
備 考
入力側電磁接触器による頻繁な開閉は、電源投入時の突入電流の繰り返しにより、コンバータ部の寿命を短くするので、避け
る必要があります。
220
便利な機能
(1)
寿命警報表示と信号出力(Y90信号、Pr.255 )
制御回路コンデンサ、主回路コンデンサ、突入電流抑制回路の各部品が寿命警報出力レベルに到達したかどうかを
Pr.255 寿命警報状態表示 、及び寿命警報信号(Y90)にて確認することができます。
bit 15
7
0
0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 1
●Pr.255読出し
●Pr.255設定値読出し
bit0 制御回路コンデンサ寿命
bit1 主回路コンデンサ寿命
ビットイメージを
10進表示
bit3 突入電流抑制回路寿命
Pr.255
(10進数)
bit
(2進数)
突入電流
抑制回路寿命
主回路
コンデンサ寿命
制御回路
コンデンサ寿命
15
1111
○
○
○
14
1110
○
○
×
13
1101
○
×
○
12
1100
○
×
×
11
1011
○
○
○
10
1010
○
○
×
9
1001
○
×
○
8
1000
○
×
×
7
0111
×
○
○
6
0110
×
○
×
5
0101
×
×
○
4
0100
×
×
×
3
0011
×
○
○
2
0010
×
○
×
1
0001
×
×
○
0
0000
×
×
×
○:警報あり、×:警報なし
寿命警報信号(Y90)は、制御回路コンデンサ、主回路コンデンサ、突入電流抑制回路のうちいずれか1つでも寿命警報出
力レベルに到達するとONします。
Y90信号に使用する端子は、Pr.190∼Pr.192 (出力端子機能選択) に“90(正論理)または、190(負論理)”を設定してく
ださい。
注 記
Pr.190∼Pr.192 (出力端子機能選択) により端子割付の変更を行うと、他の機能に影響を与えることがあります。各端子の機
能を確認してから設定を行ってください。
(2)
突入電流抑制回路の寿命表示(Pr.256)
突入電流抑制回路(リレー、コンタクタ及び突入抵抗)の寿命をPr.256 に表示します。
突入電流抑制回路が動作する回数をカウントし、100%(0回)から、1%/1万回ごとにカウントダウンします。
4
10%(90万回)に到達した時点でPr.255 bit3をONするともにY90信号に警報出力します。
突入電流抑制回路の動作条件は以下のとおりです。
電源投入時
パ
ラ
メ
|
タ
不足電圧発生時(244ページ参照)
インバータリセット時
(3)
制御回路コンデンサの寿命表示(Pr.257)
制御回路コンデンサの劣化度合いをPr.257 に寿命表示します。
運転状態から制御回路コンデンサ寿命を通電時間と温度から計算し、100%からカウントダウンします。
制御回路コンデンサ寿命が10%を下回った時点でPr.255 bit0をONするとともにY90信号に警報出力します。
221
便利な機能
主回路コンデンサの寿命表示(Pr.258、Pr.259)
(4)
主回路コンデンサの劣化度合いをPr.258 に寿命表示します。
出荷時の主回路コンデンサ容量を100%として、測定するごとにコンデンサ寿命をPr.258 に表示します。
測定値が85%以下になると、Pr.255 bit1をONするともにY90信号に警報出力します。
下記要領でコンデンサ容量を測定し、コンデンサ容量の劣化度合いを確認します。
①モータが接続され、停止中であることを確認します。
②Pr.259 =“1”(測定開始)にします。
③電源をOFFします。ドライブユニットが、電源OFF時にモータに直流電圧を印加し、コンデンサ容量を求めます。
④操作パネルのLEDが消灯したことを確認後、電源を再投入します。
⑤Pr.259 =“3”(測定完了)を確認し、Pr.258 を読み出し、主回路コンデンサの劣化度合いを確認します。
Pr.259
0
1
2
3
8
9
内 容
備 考
測定なし
測定開始
測定中
測定完了
強制終了
測定エラー
初期値
電源OFFにて測定開始します
表示のみで設定はできません
備 考
下記条件で主回路コンデンサ寿命の計測をした場合、
“強制終了”(Pr.259 =“8”)や“測定エラー”(Pr.259 =“9”)となっ
たり、
“測定開始”(Pr.259 =“1”)のままとなる場合がありますので計測しないでください。また、下記条件で“測定完了”
(Pr.259 =“3”)となった場合でも正常な計測ができません。
(a)FR-HC2、FR-CVが接続されている
(b)端子P/+、N/-に直流電源が接続されている
(c)測定中に電源ONした
(d)モータがドライブユニットに接続されていない
(e)モータが回転中(フリーラン状態)
(f)ドライブユニットがアラーム停止中または、電源OFF時にアラームが発生した
(g)MRS信号、SON信号によりドライブユニット出力遮断中
(h)測定中に始動指令が入った
(i)パラメータユニット(FR-PU07)が接続されている
(j)端子PCを電源として使用している
(k)制御端子台の入出力端子がON(導通)している
測定中で操作パネルのLEDが消灯する前に電源をONした場合、
“測定中”(Pr.259 =“2”)のままとなることがあります。
その場合は②の操作からやり直してください。
ポイント
主回路コンデンサの正確な寿命測定は、コンデンサ温度により変化するので、電源遮断後3h以上経ってから実施
してください。
危険
主回路コンデンサ容量を測定する場合(Pr.259 主回路コンデンサ寿命測定 = “1”)、電源OFF時にモータへ約1s間、
直流電圧を印加します。感電の原因となりますので、電源OFF直後は、モータ端子等に触れないでください。
注 記
各部品の交換については、お買上店または当社営業所までお問い合わせください。
222
便利な機能
4.20.2 メンテナンスタイマ警報(Pr.503、Pr.504)
ドライブユニットの累積通電時間がパラメータ設定時間を経過すると、メンテナンスタイマ出力信号(Y95)を出力しま
す。操作パネルでは
(MT)を表示します。
周辺機器のメンテナンス時期の目安として利用できます。
パラメータ
名 称
番号
初期値
設定範囲
内 容
ドライブユニットの累積通電時間を
100h単位で表示(読出しのみ)
503
メンテナンスタイマ
0
0(1∼9998)
Pr.503 =“1∼9998”の時、設定値
“0”を書き込むと累積通電時間クリア
(Pr.503 =“0”の場合は書込不可)
504
メンテナンスタイマ警報出力
設定時間
0∼9998
9999
9999
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
初回電源
メンテナンスタイマ警報出力信号(Y95)
を出力するまでの時間
機能なし
ON
9998
(999800h)
Pr.503 に“0”を設定
メンテナンス
タイマ
Pr.504
(Pr.503)
時間
OFF
Y95信号
MT表示
ON
ON
ドライブユニットの累積通電時間を1hごとにEEPROMに記憶し、Pr.503 メンテナンスタイマ に100h単位で表示します。
Pr.503 は、9998(999800h)でクランプされます。
Pr.503 の値がPr.504 メンテナンスタイマ警報出力設定時間 に設定した時間(100h単位)を経過すると、メンテナンスタイ
マ警報出力信号(Y95)を出力します。
Y95信号出力に使用する端子は、Pr.190∼Pr.192 (出力端子機能選択) に“95(正論理)または、195(負論理)”を設定して、
機能を割り付けてください。
注 記
累積通電時間のカウントは、1hごとです。1h未満での通電時間はカウントしません。
Pr.190∼Pr.192 (出力端子機能選択) により端子割付の変更を行うと、他の機能に影響を与えることがあります。各端子の機
能を確認してから設定を行ってください。
参照パラメータ
Pr.190∼Pr.192 (出力端子機能選択) 4
126ページ参照
パ
ラ
メ
|
タ
223
便利な機能
4.20.3 電流平均値モニタ信号(Pr.555∼Pr.557)
定速運転中の出力電流の平均値とメンテナンスタイマ
値を電流平均値モニタ信号(Y93)にパルス出力します。
シーケンサのI/Oユニットなどに出力のパルス幅は、機
械の磨耗やベルトの延びや、装置の経年劣化によるメ
ンテナンス時期の目安として使用できます。
パルス出力は電流平均値モニタ信号(Y93)に、20sを1
サイクルとして、定速運転中に繰り返し出力します。
シーケンサ 出力
入力
ユニット ユニット
ドライブ
ユニット
メンテナンス
時期だ。
部品が
寿命だよ。
パラメータ
名 称
初期値
設定範囲
電流平均時間
データ出力マスク時間
電流平均値モニタ信号出力
基準電流
1s
0.1∼1.0s
0s
0∼20s
モータ
定格電流
0∼500A
番号
555
556
557
内 容
スタートパルス出力中(1s)、電流を平均する時間
過渡状態データを採取しない(マスクする)時間
出力電流平均値の信号出力する基準(100%)
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
Pr.77 パラメータ書込選択 を“0”(初期値)にしてあっても運転中、運転モードに関係なく設定値を変更することができます。
モータ定格電流は、271 ページ を参照してください。
加速から定速運転へ
回転速度
時間
1サイクル(20s)
次サイクル
Y93信号
①データ出力マスク時間
加減速から定速に移行した時
Pr.556の時間Y93信号を出力しません
②スタートパルス
1s(固定)間Hi出力
Pr.555に設定した時間、出力電流を平均化
③出力電流平均値パルス
スタートビット出力中、平均した電流値を
0.5∼9s(10%∼180%)の範囲でLow出力
出力電流平均値(A)
×5s
信号出力時間=
Pr.557(A)
⑤エンドパルス
1∼16.5s Low出力
④メンテナンスタイマパルス
メンテナンスタイマ値(Pr.503)を2∼9s
(16000h∼72000h)の範囲でHi出力
Pr.503×100h
×5s
信号出力時間=
40000h
電流平均値モニタ信号(Y93)のパルス出力を上記に示します。
Y93信号出力に使用する端子は、Pr.190、Pr.191 (出力端子機能選択) に“93(正論理)または、193(負論理)”を設定して、
機能を割り付けてください。(Pr.192 ABC端子機能選択 には割付けできません。)
① Pr.556 データ出力マスク時間 の設定
加減速状態から一定速運転に切換わり直後は出力電流が安定しない状態(過渡状態)となります。Pr.556 に過渡状態データ
を採取しない(マスクする)時間を設定します。
② Pr.555 電流平均時間 の設定
出力電流の平均は、スタートパルス(1s)Hi出力中に行います。Pr.555 には、スタートパルス出力中、電流を平均する時間
を設定します。
224
便利な機能
③ Pr.557 電流平均値モニタ信号出力基準電流 の設定
出力電流平均値の信号出力する基準(100%)を設定します。信号出力する時間は、下記計算式で求めます。
× 5s
(出力電流平均値100%/5s)
信号出力時間
出力電流平均値
Pr.557 設定値
ただし、出力時間の範囲は、0.5∼9sで、出力電流平均値がPr.557 設定値の
10%未満・・・0.5s、180%を超える・・・9s
例)Pr.557 =10Aとし、出力電流平均値が15Aであった場合
15A/10A×5s=7.5 となるので、電流平均値モニタ信号は、7.5s間Low出
(s)
9
0.5
10
180
出力電流平均値
(%)
力となります。
Pr.503 × 100
× 5s (メンテナンスタイマ値100%/5s)
40000h
信号出力時間
④ Pr.503 メンテナンスタイマ の出力
出力電流平均値をLow出力した後、メンテナンスタイマ値をHi出力します。メンテ
ナンスタイマ値の出力時間は、下記計算式で求めます。
(s)
9
2
ただし、出力時間の範囲は、2∼9sで、Pr.503 が
16000
72000 (h)
メンテナンスタイマ値
16000h未満・・・2s、72000hを超える・・・9s
備 考
データ出力のマスクや出力電流のサンプリングは、加減速中には、行いません。
スタートパルス出力中に定速から加減速に移行した場合は、無効データと判断し、スタートパルスを3.5s間Hi出力し、エンド
信号を16.5s間Low出力します。
スタートパルスが出力完了後は、加減速状態となっても、最低1サイクル信号出力します。
スタートパルス出力中
定速から減速へ
回転速度
時間
前サイクル
無効サイクル(20s)
次サイクル
Y93信号
②スタートパルス
3.5s間Hi出力
⑤エンドパルス
16.5s間Low出力
1サイクル信号出力終了時点で出力電流値(ドライブユニット出力電流モニタ)が0Aの場合、次回一定速状態となるまで信号出
力しません。
1サイクル信号出力終了時点で加減速状態の場合、電流平均値モニタ信号(Y93)は、20s間Low出力(データ出力なし)となりま
4
す。
注 記
位置制御時、電流平均値モニタは無効です。
Pr.190∼Pr.192 (出力端子機能選択) により端子割付の変更を行うと、他の機能に影響を与えることがあります。各端子の機
能を確認してから設定を行ってください。
参照パラメータ
Pr.190∼Pr.192 (出力端子機能選択) Pr.503 メンテナンスタイマ 126ページ参照
223ページ参照
225
パ
ラ
メ
|
タ
便利な機能
4.20.4 フリーパラメータ(Pr.888、Pr.889)
0∼9999の設定範囲で任意の番号を入力できます。
例えば
複数台使用時、機台番号とする
複数台使用時、運転用途ごとにパターン番号とする
導入、点検年月とする
などに利用できます。
パラメータ
名 称
番号
初期値
設定範囲
888
フリーパラメータ1
9999
0∼9999
889
フリーパラメータ2
9999
0∼9999
内 容
任意の数値を入力可能
ドライブユニットの電源をOFFしても内
容は保持される
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
Pr.77 パラメータ書込選択 を“0”(初期値)にしてあっても運転中、運転モードに関係なく設定値を変更することができます。
備 考
Pr.888、Pr.889 はドライブユニットの動作には影響しません。
226
便利な機能
4.20.5 任意のアラームを発生させる(Pr.997)
パラメータを設定することで、任意のアラームを発生させることができます。
アラーム発生時のシステム動作をチェックする場合などに使用できます。
パラメータ
名 称
番号
初期値
設定範囲
内 容
16∼18、32∼34、48、
49、64、82、96、97、
997
任意アラーム書込み
9999
112、128、129、144、
設定範囲は、ドライブユニットの異常デー
160、161、176∼179、
タコード(通信で読み出し値)と同じです。
192、197、199∼201、
書込み値はEEPROMには記憶されません。
208、209、211、221、
241、246、247、253
読み出し値は常に“9999”です。
9999
設定してもアラームは発生しません。
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
(1)
任意アラーム書込み(Pr.997)
Pr.997 任意アラーム書込み に発生させたいアラームの番号を書き込むと、任意のアラームを発生させることができま
す。
Pr.997 任意アラーム書込み に設定した値はEEPROMには記憶しません。
アラーム発生時は、ドライブユニットトリップし異常出力(ALM)します。
任意アラーム発生中は、最新のアラーム履歴に任意アラームが表示されます。リセット後は、任意アラーム発生前のア
ラーム履歴に戻ります。(任意アラーム書込み機能で発生させたアラームはアラーム履歴に記録されません。)
アラームの解除は、ドライブユニットリセットで行います。
●Pr.997 任意アラーム書込み で書込み可能なデータと対応するアラーム
設定値(データコード)
アラーム内容
設定値(データコード)
アラーム内容
設定値(データコード)
16(H10)
E.OC1
112(H70)
E.BE
199(HC7)
アラーム内容
E.AIE
17(H11)
E.OC2
128(H80)
E.GF
200(HC8)
E.USB
18(H12)
E.OC3
129(H81)
E.LF
201(HC9)
E.SAF
32(H20)
E.OV1
144(H90)
E.OHT
208(HD0)
E.OS
33(H21)
E.OV2
160(HA0)
E.OPT
209(HD1)
E.OSD
34(H22)
E.OV3
161(HA1)
E.OP1
211(HD3)
E.OD
48(H30)
E.THT
176(HB0)
E.PE
221(HDD)
E.OA
49(H31)
E.THM
177(HB1)
E.PUE
241(HF1)
E.1
64(H40)
E.FIN
178(HB2)
E.RET
246(HF6)
E.6
82(H52)
E.ILF
179(HB3)
E.PE2
247(HF7)
E.7
96(H60)
E.OLT
192(HC0)
E.CPU
253(HFD)
E.13
97(H61)
E.SOT
197(HC5)
E.IOH
4
備 考
既にアラームが発生している場合は、Pr.997 を設定してもアラームは発生しません。
任意アラーム書込み機能によりアラームを発生させた場合、リトライ機能は動作しません。
任意アラーム書込み機能によりアラームを発生させた後に他のアラームが発生した場合でも、アラーム表示は変わりません。
また、アラーム履歴にも記憶されません。
227
パ
ラ
メ
|
タ
パラメータユニット、操作パネルの設定
4.21 パラメータユニット、操作パネルの設定
目的
操作パネルの
設定が必要なパラメータ
による回転方向の
RUNキー回転方向選択
選択
操作パネルのMダイヤルをボリューム
のように速度設定する
操作パネル動作選択
操作パネルのキーロック
操作パネルのMダイヤルによる速度設
速度変化量設定
定の変化量を変更する
パラメータユニットのブザー音を制御 PUブサー音制御
パラメータユニットのLCDコントラス
PUコントラスト調整
トを調整する
参照ページ
Pr.40
228
Pr.161
229
Pr.295
232
Pr.990
233
Pr.991
233
4.21.1 RUNキー回転方向選択(Pr.40)
操作パネルの
パラメータ
番号
操作による回転方向を選択します。
名 称
初期値
設定範囲
正転
0
逆転
1
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
40
228
RUNキー回転方向選択
0
内 容
パラメータユニット、操作パネルの設定
4.21.2 Mダイヤルボリュームモード/キーロック操作選択(Pr.161)
操作パネルのMダイヤルでボリュームのように運転することができます。
操作パネルのキー操作を無効にできます。
パラメータ
名 称
番号
161
初期値
速度設定/キーロック操作選択
設定範囲
内 容
0
Mダイヤル
速度設定モード
1
Mダイヤル
ボリュームモード
0
10
Mダイヤル
速度設定モード
11
Mダイヤル
ボリュームモード
キーロックモード無効
キーロックモード有効
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
(1)
Mダイヤルで速度設定する
操作例
900r/minで運転する。
操 作
表 示
1. 電源投入時画面
モニタ表示になります。
2.
を押してPU運転モードにします。
3.
を回して設定したい速度を表示さ
PU表示が点灯します。
せます。
約5s間点滅します。
4. 数値が点滅している間に
を押して
速度を設定します。
(
を押さないと約5sフリッカーし
た後表示は“
”(0r/min)に戻ってし
フリッカー・・・速度設定完了!!
3s後モニタ表示になります。
まいます。その際は、もう1度“操作3”
に戻って速度を設定してください。)
約3sフリッカーした後表示は“
”(モ
ニタ表示)に戻ります。
5. 始動→加速→定速
を押して運転します。
4
表示部の速度表示がPr.7 加速時間 に
従って大きくなり、
“
”(900r/
パ
ラ
メ
|
タ
min)を表示します。
6. 設定速度を変更する場合は3、4の操作を行ってください。(前の設定速度から始まります。)
7. 減速→停止
を押すと停止します。
表示部の速度表示がPr.8 減速時間 に
従って小さくなり“
停止
”(0r/min)を表
示し、モータは運転を停止します。
備 考
設定した速度で運転できない場合は、
を回して、5s以内に
が押されていない可能性があります。)
229
パラメータユニット、操作パネルの設定
(2)
Mダイヤルでボリュームのように速度設定する
操作例 運転中に速度を0r/minから1800r/minに変更する
操 作
表 示
1. 電源投入時画面
モニタ表示になります。
2.
を押してPU運転モードにします。
3.
を押してパラメータ設定モードに
PU表示が点灯します。
PRM表示が点灯します。
します。
(以前に読み出したパラメータの番号を
表示します)
4.
を回して
(Pr.161) に合わ
せます。
5.
を押して現在設定されている値を
読み出します。
“
”(初期値)を示します。
6.
を回して設定値“
”に変更しま
す。
7.
を押して設定します。
フリッカー・・・パラメータ設定完了!!
8. モード・モニタ確認
を2回押してモニタ・速度モニタ
にしてください。
9.
を押してドライブユニットを運転
してください。
10.
を回して“
”に合わせ
てください。
約5s間点滅します。
点滅している速度が設定速度となりま
す。
を押す必要はありません。
備 考
“1800”の点滅から“0”の表示になってしまう場合は、Pr.161 速度設定/キーロック操作選択 の設定値が“1”になってい
ない可能性があります。
運転中、停止中に関わらずMダイヤルを回すだけで速度が設定できます。
変更された速度は、10s後に設定速度としてEEPROMに記憶されます。
230
パラメータユニット、操作パネルの設定
(3)
操作パネルのMダイヤル、キー操作を無効にする(【MODE】長押し(2s))
パラメータの変更や予期せぬ始動、速度変更がないよう、操作パネルのMダイヤル、キー操作を無効にすることがきま
す。
Pr.161 を“10または11”に設定し、
を2s間押すと、Mダイヤル、キー操作が無効になります。
Mダイヤル、キー操作が無効になると、操作パネルに
Mダイヤル、キー操作をすると
が表示されます。Mダイヤル、キー操作無効状態で、
が表示されます。(2s間Mダイヤル、キー操作がないと、モニタ表示になり
ます。)
再度Mダイヤル、キー操作を有効とするには、
を2s間押してください。
備 考
Mダイヤル、キー操作無効としても、モニタ表示、
は有効です。
注 記
操作ロック解除をしないと、キー操作によるPU停止の解除はできません。
Mダイヤルを回した場合、Pr.1 上限設定 (初期値:3000r/min)に設定された速度まで上昇します。用途に応じてPr.1 上限設
定 の設定を調整してください。
4
パ
ラ
メ
|
タ
231
パラメータユニット、操作パネルの設定
4.21.3 速度変化量設定(Pr.295)
本パラメータを設定してMダイヤルの回転量に対して変化する速度の変化量を大きくすることにより、操作性を改善
することができます。
パラメータ
名 称
番号
初期値
設定範囲
0
内 容
機能無効
0.01
295
速度変化量設定
0.10
0
1.00
Mダイヤルで設定速度変更時の最小変化幅
が設定できます。
10.00
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
Pr.77 パラメータ書込選択 を“0”(初期値)にしてあっても運転中、運転モードに関係なく設定値を変更することができます。
Pr.37 、Pr.144 により周波数表示または機械速度表示に変更した場合に有効になります。(134ページ参照 )
(1)
基本動作
Pr295 ≠“0”を設定することにより、Mダイヤルで設定速度変更時の最小変化幅が設定できます。
たとえば、Pr.295 =“10”に設定した場合は、Mダイヤル1クリック(1移動量)で10r/min→20r/min→30r/minのように
10r/min単位で速度が変化します。
Pr.295 =“1”の場合
1クリック
1クリック
1クリック
Mダイヤルは1回転で24クリック移動量です。
備 考
Pr.37 で機械速度表示にした場合も同様に、変化量の最小単位はPr.295 で決定されます。ただし、速度設定は設定した機械速
度を周波数変換し再度速度表示に逆変換するため設定値が異なることがあります。
設定周波数が100以上になった場合、表示が0.1単位になるので、Pr.295 <0.1の設定でも最小変化幅は0.1となります。
機械速度設定が1000以上になった場合、表示が1単位になるので、Pr.295 <1の設定でも最小変化幅は1となります。
注 記
Pr.295 は、単位表示しません。
設定速度のモードのみ有効で、他の速度関連のパラメータ設定時は動作しません。
周波数設定の場合、10を設定すると 10Hz単位で周波数設定が変化しますので、行き過ぎに注意してください。(ボリューム
モード時)
232
パラメータユニット、操作パネルの設定
4.21.4 ブザー音制御(Pr.990)
パラメータユニット(FR-PU07)のキーを操作した時に、
「ピッ」という音を出すことができます。
パラメータ
名 称
番号
990
PUブザー音制御
初期値
1
設定範囲
0
内 容
ブザー音なし
1
ブサー音あり
上記パラメータは、Pr.160 拡張機能表示選択 =“0”のとき設定可能となります。(161ページ参照)
Pr.77 パラメータ書込選択 を“0”(初期値)にしてあっても運転中、運転モードに関係なく設定値を変更することができます。
備 考
ブザー音ありに設定すると、インバータアラーム発生時はブザー音で知らせます。
4.21.5 PUコントラスト調整(Pr.991)
パラメータユニット(FR-PU07)のLCDのコントラスト調整を行うことができます。
設定値を小さくすると、コントラストが薄くなります。
パラメータ
番号
名 称
初期値
設定範囲
58
0∼63
内 容
0:薄い
991
PUコントラスト調整
↓
63:濃い
上記パラメータは、パラメータユニット(FR-PU07)接続時のみシンプルモードパラメータとして表示されます。
Pr.77 パラメータ書込選択 を“0”(初期値)にしてあっても運転中、運転モードに関係なく設定値を変更することができます。
4
パ
ラ
メ
|
タ
233
パラメータクリア、オールクリア
4.22 パラメータクリア、オールクリア
ポイント
Pr.CL パラメータクリア、ALLC パラメータオールクリア=“1”に設定することにより、パラメータを初期
値に戻せます。(Pr.77 パラメータ書込選択=“1”に設定するとクリアされません。)
この操作によりクリアされるパラメータは48ページ∼ のパラメータ一覧で確認してください。
操 作
1. 電源投入時画面
表 示
モニタ表示になります。
2.
を押してPU運転モードにします。
3.
を押してパラメータ設定モードに
PU表示が点灯します。
PRM表示が点灯します。
します。
4.
を回して
(
(以前に読み出したパラメータの番号を
表示します)
パラメータクリア
)に
合わせます。
パラメータオールクリア
5.
を押して現在設定されている値を
読み出します。
“
”(初期値)を示します。
6.
を回して設定値“
”に変更しま
す。
7.
パラメータクリア
を押して設定します。
パラメータオールクリア
フリッカー・・・パラメータ設定完了!!
を回すと他のパラメータを読み出すことができます。
を押すと設定値を再度表示します。
を2回押すと次のパラメータを表示します。
設定値
内 容
0
クリア実行しません。
1
パラメータを初期値に戻します。(パラメータクリアは校正パラメータ、端子機能選択パラメー
タ などを除くパラメータを初期値に戻します。)パラメータクリア、オールクリアの可否は48
ページ のパラメータ一覧で確認してください。
備 考
のフリッカーとなってしまった…なぜ?
運転モードがPU運転モードになっていません。
PUコネクタ、USBコネクタを使用している。
PUケーブル、USBケーブルを取り外し、操作2からやり直してください。
234
初期値変更リスト
4.23 初期値変更リスト
初期値から変更されているパラメータを表示、設定できます。
操 作
1. 電源投入時画面
表 示
モニタ表示になります。
2.
を押してPU運転モードにします。
3.
を押してパラメータ設定モードに
PU表示が点灯します。
PRM表示が点灯します。
します。
(以前に読み出したパラメータの番号を
表示します)
4.
を回して
5.
を押すと初期値変更リスト画面に
に合わせます。
* 初期値変更リスト作成には
数秒かかる場合があります。
なります。
この間“
”が点滅
します。
6.
を回すと変更のあったパラメータ
番号が表示されます。
設定値を変更する場合は、
で現在
設定されている値を読み出します。
を回して
で設定を変更する
ことができます。
(47ページ操作6、7参照)
フリッカー・・・パラメータ設定完了!!
を回して他のパラメータを読み
出すことができます。
最後まで表示したら
に戻り
ます。
7.
の状態で
を押すとパラ
メータ設定モードに戻ります。
を回すと他のパラメータを設定できます。
を押すと再度変更リストを表示します。
4
注 記
パ
ラ
メ
|
タ
校正パラメータ(C0(Pr.900)∼C7(Pr.905)) は初期値から変更されていても表示しません。
シンプルモード設定時(Pr.160 =9999)は、シンプルモードパラメータのみの表示となります。
Pr.160 は設定値の変更有無にかかわらず表示されます。
初期値変更リスト作成後にパラメータ設定変更を行った場合、次に初期値変更リスト作成を行った際に反映されます。
参照パラメータ
C0(Pr.900) FM端子校正 141ページ参照
C2(Pr.902)∼C7(Pr.905) (速度設定バイアス/ゲインパラメータ) 152ページ参照
235
アラーム履歴の確認とクリア
4.24 アラーム履歴の確認とクリア
(1)
アラーム(重故障)履歴の確認
モニタ・速度設定
パラメータ設定
[操作パネルで運転]
[パラメータの設定変更]
[アラーム履歴の操作]
過去8回分のアラームをMダイヤルで表示することができます。
(最新のアラーム履歴には「. 」がつきます。)
アラームの無い場合は
を表示します。
出力電流 ∗1
回転速度
Hz
A
点滅
Hz
A
点滅
点滅
通電時間 ∗2
出力電圧
Hz
A
点滅
Hz
A
点滅
アラーム履歴番号
(過去何回目のエラーなのか分かります)
Mダイヤル
を押す
点滅
Mダイヤル
を押す
点滅
Mダイヤル
を押す
短時間の過電流により、過電流遮断が発生した場合、アラーム履歴に記憶される電流モニタ値は、実際の電流値より低いこと
があります。
積算通電時間、実稼動時間は0∼65535hまで積算し、その後はクリアされ、再度0から積算されます。
操作パネル使用時は、1h=0.001の表示として65.53(65530h)まで表示し、その後は0からの積算となります。
236
アラーム履歴の確認とクリア
(2)
クリア手順
ポイント
Er.CL アラーム履歴クリア =“1”に設定することにより、アラーム履歴をクリアできます。
操 作
表 示
1. 電源投入時画面
モニタ表示になります。
2.
PRM表示が点灯します。
を押してパラメータ設定モードに
します。
(以前に読み出したパラメータの番号を
表示します)
3.
を回して
(アラーム履歴
クリア)に合わせます。
4.
を押して現在設定されている値を
読み出します。
“
”(初期値)を示し
ます。
5.
を回して設定値“
”に変更し
ます
6.
を押して設定します。
フリッカー・・・アラーム履歴クリア完了!!
を回すと他のパラメータを読み出すことができます。
を押すと設定値を再度表示します。
を2回押すと次のパラメータを表示します。
参照パラメータ
Pr.77 パラメータ書込選択 160ページ参照
4
パ
ラ
メ
|
タ
237
MEMO
238
5
異常とその対策について
この章では、本製品をお使いいただく上での基本的な「異常とそ
の対策」について説明しています。
注意事項など必ず一読してからご使用ください。
5.1
5.2
5.3
5.4
5.5
1
保護機能のリセット方法 ..................................................................... 240
異常表示一覧 ........................................................................................ 241
原因とその対策..................................................................................... 242
デジタル表示と実文字との対応 ......................................................... 251
お困りのときはまず確認してください .............................................. 252
2
3
4
5
6
7
239
保護機能のリセット方法
ドライブユニットに異常(重故障)が発生すると保護機能が動作し、アラーム停止してPUの表示部が下記のエラー (異常)表示
に自動的に切り換わります。
万一、以下のいずれにも該当しない場合、およびその他にお困りの点がございましたら、お買上店または当社営業所までご
連絡ください。
異常出力信号の保持 ...............保護機能が動作したとき、ドライブユニットの入力側に設けた電磁接触器 (MC) を開路させ
ると、ドライブユニットの制御電源がなくなり、異常出力は保持されません。
異常表示...................................保護機能が動作すると、操作パネル表示部が自動的に切り換わります。
リセット方法 ...........................保護機能が動作すると、ドライブユニット出力停止状態を保持しますので、リセットしない
限り再始動できません。(240ページ参照)
保護機能が動作したときは、原因の処置を行ってから、ドライブユニットをリセットして、運転を再開してください。
ドライブユニットが故障・破損する可能性があります。
ドライブユニットの異常表示には、大きく分けて以下のものがあります。
(1) エラーメッセージ
操作パネルやパラメータユニット(FR-PU07)による操作ミスや、設定ミスをメッセージ表示します。ドライブユニッ
トは出力遮断しません。
(2) 警報
操作パネルに表示しても、ドライブユニットは出力遮断しませんが、対策しないと重故障が発生する可能性があります。
(3) 軽故障
ドライブユニットは出力遮断しません。パラメータ設定にて軽故障信号を出力することもできます。
(4) 重故障
保護機能動作にてドライブユニットを出力遮断し、異常出力します。
備 考
過去8回分のアラームをMダイヤルで表示することができます。(44ページ参照)
5.1 保護機能のリセット方法
(1) ドライブユニットリセットについて
次に示す項目のいずれかの操作を行うとドライブユニット本体のリセットをかけることができます。なお、リセットを実行
すると電子サーマルの内部熱積算値やリトライ回数はクリア(消去)されますので注意してください。
リセット解除後約1sで復帰します。
操作1. ............操作パネルを使用して、
にてリセットを行う。
(ドライブユニット保護機能(重故障)動作時のみ可能(重故障は245ペー
ジ参照 ))
操作2. ............リセット信号(RES)を0.1s以上ONする。(RES信号ONが続くと、「Err」
表示(点滅)してリセット状態であることを知らせます。)
ドライブユニット
RES
SD
操作3. ............電源をいったん開放(OFF)し、操作パネルの表示が消灯してから再投入
する。
ON
OFF
備 考
運転信号を入れたままアラームリセットを行うと突然再始動しますので、運転信号が切れていることを確認してから行ってく
ださい。
240
異常表示一覧
5.2 異常表示一覧
操作パネル表示
エ
ラ
|
メ
名称
Eーーー
HOLD
参照
操作パネル表示
名称
ページ
参照
ページ
アラーム履歴
236
E.OLT
トルク制限による停止
247
操作パネルロック
242
E.SOT
脱調検出
247
247
パスワード設定中
242
E. BE
ブレーキトランジスタ異
常検出
パラメータ書込みエラー
242
E.GF
始動時出力側地絡過電流
248
E.LF
出力欠相
248
Err.
ドライブユニットリセット中
243
E.OHT
外部サーマル動作
249
OL
トルク制限中
243
E.OPT
オプション異常
248
oL
ストール防止
243
E.OP1
通信オプション異常
248
RB
回生ブレーキプリアラーム
244
オプション異常
248
TH
電子サーマルプリアラーム
244
パラメータ記憶素子異常
249
PS
PU停止
243
E.PE2
内部基板異常
249
MT
メンテナンス信号出力
244
PU抜け
249
原点セットミス警報
244
重
E.PUE
HP1
故
E.RET
リトライ回数オーバー
249
HP2
原点復帰未完警報
244
不足電圧
244
CPUエラー
250
E.OC1
加速中過電流遮断
245
E. 6/
E. 7/
E.CPU
E.OC2
定速中過電流遮断
245
E.IOH
突入電流抑制回路異常
250
E.OC3
減速、停止中過電流遮断
245
E.AIE
アナログ入力異常
250
E.OV1
加速中回生過電圧遮断
246
E.OS
過速度発生
250
重
E.OV2
定速中回生過電圧遮断
246
故
速度偏差過大検出
250
E.OV3
減速、停止中回生過電圧遮断
246
位置誤差大
250
E.THT
ドライブユニット過負荷遮断
(電子サーマル)
E.OD
246
E.OA
加速度異常
251
E.THM
モータ過負荷遮断
(電子サーマル)
246
E.USB
USB通信異常
251
E.FIN
フィン過熱
247
E.SAF
内部回路異常
251
E.ILF
入力欠相
247
E.13
LOCd
ッ
セ
Er1∼4
|
ジ
警
報
UV
障
E.1
E.PE
障
/
/
E.OSD
異
常
と
そ
の
対
策
に
つ
い
て
5
241
原因とその対策
5.3 原因とその対策
(1) エラーメッセージ
操作上のトラブルをメッセージ表示します。出力遮断しません。
操作パネル表示
HOLD
名 称
操作パネルロック
内 容
操作ロックモードが設定されています。
以外の操作ができないようになっています。(231ページ参照)
チェックポイント
処 置
操作パネル表示
-------------を2s長押しで操作ロックを解除できます。
LOCd
パスワード設定中
名 称
パスワード機能が設定されています。パラメータの表示、設定が出来ない状態になっています。
内 容
-------------チェックポイント
Pr.297 パスワード登録/解除 にパスワードを入力して、パスワード機能を解除してから操作してください。(162
処 置
ページ参照)
操作パネル表示
Er1
名 称
書込み禁止エラー
Pr.77 パラメータ書込選択 にてパラメータの書込みが禁止中に、パラメータの設定をしようとした場合
内 容
速度ジャンプの設定範囲が重複した場合
PUとドライブユニットが正常に通信できていない場合
Pr.77 パラメータ書込選択 の設定値を確認してください。(160ページ参照)
チェックポイント Pr.31∼Pr.36(速度ジャンプ) の設定値を確認してください。(99ページ参照)
PUとドライブユニットの接続を確認してください。
操作パネル表示
名 称
内 容
チェックポイント
処 置
操作パネル表示
Er2
運転中書込みエラー
Pr.77 ≠“2(すべての運転モードで運転状態に関わらず書込み可)”で運転中、STF(STR)をONでの運転中にパラ
メータ書込みを行った場合
Pr.77 の設定値を確認してください。(160ページ参照)
運転中ではないか
Pr.77 =“2”にしてください。
運転を停止してから、パラメータの設定をしてください。
Er3
校正エラー
名 称
アナログ入力のバイアス、ゲインの校正値が接近しすぎている場合
内 容
チェックポイント 校正パラメータC3、C4、C6、C7 (校正機能)の設定値の確認をしてください。(152ページ参照)
操作パネル表示
名 称
内 容
チェックポイント
Er4
モード指定エラー
Pr.77 ≠“2”の時に外部、NET運転モードにてパラメータ設定をしようとした場合
操作パネルに指令権がない状態でパラメータ設定をしようとした場合
運転モードは“PU運転モード”となっているか。
Pr.77 の設定値を確認してください。(160ページ参照)
Pr.551=“9999(初期値)”の状態で、USBケーブル、パラメータユニット(FR-PU07)が接続されていないか。
Pr. 551 の設定値を確認してください。
運転モードを“PU運転モード”にしてから、パラメータの設定をしてください。(165ページ参照)
処 置
Pr.77 =2としてからパラメータの設定をしてください。
USBケーブル、パラメータユニット(FR-PU07)を外して、パラメータの設定をしてください。
Pr.551 =“4”としてからパラメータの設定をしてください。(173ページ参照)
242
原因とその対策
操作パネル表示
名 称
内 容
処 置
Err.
ドライブユニットリセット中
RES信号や通信、PUからリセット指令を実行した場合
電源OFF時にも表示します。
リセット指令をOFFしてください。
(2) 警報
保護機能動作時も出力遮断しません。
操作パネル表示
OL
名 称
トルク制限中
FR-PU07
OL
ドライブユニットの出力電流がトルク制限動作レベル(Pr.22 トルク制限動作レベル 等)を超えると、
加速中
過負荷電流が減少するまで速度の上昇を止め、ドライブユニットが過電流遮断に至るのを防ぎます。
トルク制限動作レベル未満になると再び上昇させます。
ドライブユニットの出力電流がトルク制限動作レベル(Pr.22 トルク制限動作レベル 等)を超えると、
内 容
定速運転中
過負荷電流が減少するまで速度を下げ、過電流遮断になるのを防ぎます。トルク制限動作レベル未満
になると設定速度まで戻ります。
ドライブユニットの出力電流がトルク制限動作レベル(Pr.22 トルク制限動作レベル 等)を超えると、
減速中
過負荷電流が減少するまで速度の下降をやめ、ドライブユニットが過電流遮断に至るのを防ぎます。
トルク制限動作レベル未満になると再び下降させます。
Pr.7 加速時間、Pr.8 減速時間、Pr.465∼Pr.478 位置決め加減速時間が短すぎる可能性があります。
チェックポイント
負荷が重すぎる可能性があります。
周辺機器に不具合はありませんか?
Pr.22 トルク制限動作レベル の設定値は適切か
Pr.7 加速時間、Pr.8 減速時間、Pr.465∼Pr.478 位置決め加減速時間を長くしてください。(108ページ参照)
負荷を軽くする。
トルク制限動作電流はPr.22 トルク制限動作レベル で設定できます。(初期値は200%です。)加減速時間が変わ
処 置
る可能性があります。Pr.22 トルク制限動作レベル でトルク制限動作レベルを上げるか、Pr.156 トルク制限動
作選択 でトルク制限が動作しないようにしてください。(また、OL動作時の運転継続についてもPr.156 で設定
できます。)
PMモータの接続を確認する。
操作パネル表示
oL
名 称
ストール防止
FR-PU07
oL
モータの回生エネルギーが過大となり、回生エネルギー消費能力を超えると、速度の下降を止め、
内 容
チェックポイント
処 置
操作パネル表示
名 称
内 容
減速中
過電圧遮断に至るのを防ぎます。回生エネルギーが減少した時点で、再び減速を続けます。
回生回避機能選択時(Pr.882 =“1”)、モータの回生エネルギーが過大となった場合、回転数を上
昇させ過電圧遮断に至るのを防ぎます。(218ページ参照)
急減速運転ではないか。
回生回避機能(Pr.882、Pr.883、Pr.885、Pr.886)は使用しているか。(218ページ参照)
減速時間が変わる可能性があります。Pr.8 減速時間 で減速時間を長くしてください。
FR-PU07
PS
PS
PU停止
Pr.75 リセット選択/PU抜け検出/PU停止選択 によりPUの
による停止が設定されています。(Pr.75 について
は157ページ を参照してください。)
チェックポイント 操作パネルの
処 置
異
常
と
そ
の
対
策
に
つ
い
て
を押して停止させていないか。
始動信号をOFFし、
で解除されます。
243
5
原因とその対策
操作パネル表示
名 称
RB
FR-PU07
RB
回生ブレーキプリアラーム
回生ブレーキ使用率が、Pr.70 特殊回生ブレーキ使用率 設定値の85%以上となった場合に表示します。Pr.70 特殊
回生ブレーキ使用率 の設定が初期値(Pr.70 =“0”)の場合、この保護機能は機能しません。回生ブレーキ使用率が
内 容
100%に達すると、回生過電圧(E.OV_)となります。
[RB]表示と同時にRBP信号を出力することができます。RBP信号出力に使用する端子は、Pr.190∼Pr.192(出力端
子機能選択) のいずれかに“7(正論理)または107(負論理)”を設定して機能を割り付けてください。(126ページ参
照)
チェックポイント
処 置
ブレーキ抵抗の使用率が高くないか。
Pr.30“回生機能選択”、Pr.70 特殊回生ブレーキ使用率 の設定値は正しいか。
減速時間を長くする。
Pr.30“回生機能選択”、Pr.70 特殊回生ブレーキ使用率 の設定値を確認する。
操作パネル表示
名 称
FR-PU07
TH
TH
電子サーマルプリアラーム
電子サーマルの積算値が、Pr.9 電子サーマル の設定値の85%以上に達すると表示します。Pr.9 電子サーマル の設
定値の100%に達すると、モータ過負荷遮断(E.THM)となります。
内 容
[TH]表示と同時にTHP信号を出力することができます。THP信号出力に使用する端子は、Pr.190∼Pr.192(出力端
子機能選択) のいずれかに“8(正論理)または108(負論理)”を設定して機能を割り付けてください。(126ページ参
照)
チェックポイント
処 置
操作パネル表示
負荷が大きい、急加速運転ではないか。
Pr.9 電子サーマル の設定値は妥当か。(113ページ参照)
負荷量、運転ひん度を低減する。
Pr.9 電子サーマル の設定値を妥当な設定値にする。(113ページ参照)
FR-PU07
MT
MT
名 称
メンテナンス信号出力
ドライブユニットの累積通電時間が一定の時間経過したことを知らせます。
内 容
Pr.504 メンテナンスタイマ警報出力設定時間 の設定が初期値(Pr.504 =“9999”)の場合、この保護機能は機能し
ません。
チェックポイント
処 置
操作パネル表示
名 称
内 容
チェックポイント
処 置
操作パネル表示
名 称
内 容
Pr.503 メンテナンスタイマ の値がPr.504 メンテナンスタイマ警報出力設定時間 に設定した値より大きくなってい
ます。(223ページ参照)
Pr.503 メンテナンスタイマ に“0”を書き込むと信号を消すことができます。
HP1、
HP2
、
FR-PU07
原点復帰エラー
位置制御の原点復帰動作にエラーが発生した場合に表示します。(89ページ参照)
エラー発生原因の調査
設定パラメータと入力信号が正しく入力されているか確認する。
UV
FR-PU07
——
不足電圧
ドライブユニットの電源電圧が下がると制御回路が正常な機能を発揮しなくなります。また、モータのトルク不足
や発熱の増加を生じます。このため電源電圧が約AC115V以下になるとドライブユニットの出力を停止し、
表示します。
電圧が正常に戻ると警報は解除されます。
チェックポイント 電源電圧は正常か。
電源など電源系統機器を調査する。
処 置
244
——
を
原因とその対策
(3) 重故障
保護機能動作にてドライブユニットを出力遮断し、異常出力します。
操作パネル表示
名 称
内 容
E.OC1
FR-PU07
カソクジ カデンリュウ
加速中過電流遮断
加速運転中に、ドライブユニット出力電流がモータ定格電流の約230%以上になったとき、保護回路が動作し、ドラ
イブユニットの出力を停止します。
急加速運転ではないか。
昇降機の下降加速時間が長くないか。
出力短絡・地絡はないか。
チェックポイント トルク制限動作レベルの設定が高過ぎる。
ドライブユニットとモータ容量が指定の組み合わせになっているか。
モータフリーラン中にドライブユニットに始動指令が入っていないか。
ドライブユニットの出力側(負荷側)3相(U、V、W)の配線は正しいか。(欠相していないか。)
加速時間を長くする。(昇降機の下降加速時間を短くする。)
始動時に、「E.OC1」が必ず点灯する場合、1度モータを外して始動させてみてください。
それでも「E.OC1」が点灯する場合は、お買上店または当社営業所までご連絡ください。
処 置
出力短絡・地絡のないように配線を確認する。
トルク制限動作レベルの設定を下げる。(95ページ参照)
ドライブユニットとモータ容量を指定の組み合わせにする。
モータが停止してから始動信号を入れる。
配線を正しく行う。
操作パネル表示
名 称
内 容
E.OC2
FR-PU07
テイソクジ カデンリュウ
定速中過電流遮断
定速運転中に、ドライブユニット出力電流がモータ定格電流の約230%以上になったとき、保護回路が動作し、ド
ライブユニットの出力を停止します。
負荷の急変はないか。
出力短絡・地絡はないか。
チェックポイント
トルク制限動作レベルの設定が高過ぎる。
ドライブユニットとモータ容量が指定の組み合わせになっているか。
モータフリーラン中にドライブユニットに始動指令が入っていないか。
ドライブユニットの出力側(負荷側)3相(U、V、W)の配線は正しいか。(欠相していないか。)
負荷の急変をなくす。
出力短絡・地絡のないように配線を確認する
処 置
トルク制限動作レベルの設定を下げる。(95ページ参照)
ドライブユニットとモータ容量を指定の組み合わせにする。
モータが停止してから始動信号を入れる。
配線を正しく行う。
操作パネル表示
名 称
内 容
E.OC3
FR-PU07
ゲンソクジ カデンリュウ
減速、停止中過電流遮断
減速中(加速中、定速中以外)に、ドライブユニット出力電流がモータ定格電流の約230%以上になったとき、保護
回路が動作し、ドライブユニットの出力を停止します。
急減速運転ではないか。
出力短絡・地絡はないか。
異
常
と
そ
の
対
策
に
つ
い
て
モータの機械ブレーキ動作が早すぎないか。
チェックポイント トルク制限動作レベルの設定が高過ぎる。
5
ドライブユニットとモータ容量が指定の組み合わせになっているか。
モータフリーラン中にドライブユニットに始動指令が入っていないか。
ドライブユニットの出力側(負荷側)3相(U、V、W)の配線は正しいか。(欠相していないか。)
減速時間を長くする。
出力短絡・地絡のないように配線を確認する
機械ブレーキ動作を調査する。
処 置
トルク制限動作レベルの設定を下げる。(95ページ参照)
ドライブユニットとモータ容量を指定の組み合わせにする。
モータが停止してから始動信号を入れる。
配線を正しく行う。
245
原因とその対策
操作パネル表示
名 称
内 容
E.OV1
FR-PU07
カソクジ カデンアツ
加速中回生過電圧遮断
回生エネルギーにより、ドライブユニット内部の主回路直流電圧が規定値以上となると、保護回路が動作して、ド
ライブユニットの出力を停止します。電源系統に発生したサージ電圧により動作する場合もあります。
チェックポイント 加速度がゆるやかすぎないか。(昇降負荷で下降加速時など)
処 置
操作パネル表示
名 称
内 容
加速時間を短くする。
回生回避機能(Pr.882、Pr.883、Pr.885、Pr.886) を使用する。(218ページ参照)
E.OV2
FR-PU07
テイソクジ カデンアツ
定速中回生過電圧遮断
回生エネルギーにより、ドライブユニット内部の主回路直流電圧が規定値以上となると、保護回路が動作して、ド
ライブユニットの出力を停止します。電源系統に発生したサージ電圧により動作する場合もあります。
チェックポイント 負荷の急変はないか。
負荷の急変をなくす。
処 置
回生回避機能(Pr.882、Pr.883、Pr.885、Pr.886) を使用する。(218ページ参照)
必要に応じてブレーキ抵抗器やブレーキユニット、または電源回生共通コンバータ(FR-CV)を使用する。
操作パネル表示
名 称
内 容
E.OV3
FR-PU07
ゲンソクジ カデンアツ
減速、停止中回生過電圧遮断
回生エネルギーにより、ドライブユニット内部の主回路直流電圧が規定値以上となると、保護回路が動作して、ド
ライブユニットの出力を停止します。電源系統に発生したサージ電圧により動作する場合もあります。
チェックポイント 急減速運転ではないか。
減速時間を長くする。(負荷の慣性モーメントに見合った減速時間にする)
処 置
制動ひん度を減らす。
回生回避機能(Pr.882、Pr.883、Pr.885、Pr.886) を使用する。(218ページ参照)
必要に応じてブレーキ抵抗器やブレーキユニット、または電源回生共通コンバータ(FR-CV)を使用する。
操作パネル表示
E.THT
FR-PU07
トランジスタ ホゴサーマル
名 称
ドライブユニット過負荷遮断(電子サーマル)
ドライブユニット定格電流以上の電流が流れ、かつ過電流遮断に至らない(230%以下)状態で出力トランジスタ素
内 容
子の温度が保護レベルを超えた場合、ドライブユニットの出力を停止します。(過負荷耐量 150% 60s、200%
3s)
加減速時間が短くないか。
チェックポイント モータを過負荷で使用していないか。
周囲温度が高すぎないか。
加減速時間を長くする。
処 置
負荷を軽くする。
周囲温度を仕様以内とする。
操作パネル表示
FR-PU07
デンシ サーマル
名 称
モータ過負荷遮断(電子サーマル)
過負荷や定速運転中での冷却能力低下によるモータの過熱を、ドライブユニット内蔵の電子サーマルが感知し、Pr.9
内 容
電子サーマル の設定値の85%となったときプリアラーム(TH表示)となり、規定値となると、保護回路が動作し、ド
チェックポイント
処 置
E.THM
ライブユニットの出力を停止します。
モータを過負荷で使用していないか。
トルク制限動作の設定は適切か。
負荷を軽くする。
トルク制限動作の設定を適切にする。(95ページ参照)
ドライブユニットをリセットすると、電子サーマルの内部熱積算データは初期化されます。
246
原因とその対策
操作パネル表示
名 称
内 容
チェックポイント
処 置
操作パネル表示
名 称
E.FIN
FR-PU07
フィン カネツ
フィン過熱
冷却フィンが過熱すると、温度センサーが動作し、ドライブユニットの出力を停止します。
フィン過熱保護動作温度の約85%になるとFIN信号を出力することができます。
FIN信号出力に使用する端子は、Pr.190∼Pr.192(出力端子機能選択) のいずれかに“26(正論理)または126(負論理)”
を設定して割り付けてください。(126ページ参照)
周囲温度が高すぎないか。
冷却フィンの目づまりはないか。
周囲温度を仕様以内とする。
冷却フィンの清掃を行う。
E.ILF
FR-PU07
ニュウリョクケッソウ
入力欠相
Pr.872 入力欠相保護選択 にて機能有効設定(=“1”)が選択されている時に、3相電源入力のうち1相が欠相すると
内 容
ドライブユニットの出力を停止します。
3相電源入力の相間電圧アンバランスが大きい場合に動作することがあります。(145ページ参照)
Pr.872 入力欠相保護選択 の設定が初期値(Pr.872 =“0”)の場合、この保護機能は機能しません。
チェックポイント
処 置
3相電源入力用ケーブルに断線がないか。
3相電源入力の相間電圧アンバランスが大きくないか。
配線を正しく行う。
断線箇所の補修を行う。
Pr.872 入力欠相保護選択 の設定値を確認する。
3相入力電圧のアンバランスが大きい場合、Pr.872 =“0”(入力欠相保護なし)と設定する。
操作パネル表示
E.OLT
FR-PU07
ストールボウシニヨリテイシ
名 称
トルク制限による停止
トルク制限動作により、回転速度が18r/minの値まで降下し、3s経過した場合、アラーム(E.OLT)を表示し、ドラ
内 容
イブユニットの出力を停止します。トルク制限動作中はOLを表示します。
出力欠相中にトルク制限(OL)が動作した場合は、E.OLTが発生しないことがあります。
チェックポイント モータを過負荷で使用していないか。(96ページ参照)
負荷を軽くする。(Pr.22 トルク制限動作レベル の設定値を確認してください。)
処 置
操作パネル表示
名 称
内 容
チェックポイント
E.SOT
FR-PU07
異
常
と
そ
の
対
策
に
つ
い
て
モータ ダッチョウ
脱調検出
脱調しながら運転する場合に出力を停止します。
PMモータを過負荷で運転していないか。
PMモータフリーラン中にドライブユニットに始動指令が入っていないか。
PMモータ(MM-GKRシリーズ)以外のモータを駆動していないか。
モータを接続しないで運転していないか。
加速時間設定を長くする。
負荷を軽くする。
処 置
モータが停止してから始動信号を入れる。
PMモータ(MM-GKRシリーズ)を使用する。
PMモータの接続を確認する。またはPMモータテスト運転にする。(65ページ参照)
5
操作パネル表示
E.BE
FR-PU07
ブレーキカイロ イジョウ
名 称
ブレーキトランジスタ異常検出
モータからの回生エネルギー量が著しく大きいときなどで、ブレーキトランジスタの異常が発生した場合、ブレー
内 容
キトランジスタの異常を検出し、ドライブユニットの出力を停止します。
この場合、速やかにドライブユニットの電源を遮断する必要があります。
負荷イナーシャを小さくする。
チェックポイント 制動の使用頻度は適正か
ブレーキ抵抗器の選定は正しいか。
処 置
ドライブユニットを交換してください。
247
原因とその対策
操作パネル表示
名 称
内 容
チェックポイント
処 置
操作パネル表示
名 称
内 容
E.GF
FR-PU07
チラク カデンリュウ
始動時出力側地絡過電流
始動時にドライブユニットの出力側(負荷側)で地絡が生じ、地絡過電流が流れるとドライブユニットの出力を停止し
ます。
Pr.249 始動時地絡検出有無 により、保護機能の有無を設定します。Pr.249 始動時地絡検出有無 の設定が初期値
(Pr.249 =“0”)の場合、この保護機能は機能しません。
モータ、接続線に地絡はないか。
地絡箇所を復旧する。
E.LF
FR-PU07
シュツリョクケッソウ
出力欠相
ドライブユニット運転中(ゼロ速制御中、回転速度が12r/min以下の場合を除く)、ドライブユニットの出力側(負荷
側)3相(U、V、W)のうち、1相が欠相するとドライブユニット出力を停止します。Pr.251 出力欠相保護選択 によ
り、保護機能の有無を設定しています。
配線を確認する。(モータは正常か。)
チェックポイント ドライブユニット容量とモータの組合せは正しいか。
モータフリーラン中にドライブユニットに始動指令が入っていないか。
配線を正しく行う。
処 置
ドライブユニットとモータ容量を指定の組み合わせにする。
モータが停止してから始動信号を入れる。
操作パネル表示
名 称
内 容
E.OPT
FR-PU07
オプション イジョウ
オプション異常
パスワード保護されている状態(Pr.296 パスワード保護選択 =“0、100”
)で通信オプションを装着した場合に
表示されます。
チェックポイント Pr.296 パスワード保護選択 =“0、100”として、パスワード保護されていないか。
通信オプション装着時にパスワード保護をする場合は、Pr.296 パスワード保護選択 ≠“0、100”としてくださ
処 置
い。(162ページ参照)
上記対策で改善されない場合は、お買上店または当社営業所までご連絡ください。
操作パネル表示
名 称
内 容
チェックポイント
E.OP1
FR-PU07
オプション1 イジョウ
通信オプション異常
通信オプションにおける通信回線異常が発生した場合にインバータの出力を停止します。
オプション機能設定、操作がまちがっていないか。
内蔵オプションは確実にコネクタに接続されているか。
通信ケーブルが断線していないか。
終端抵抗が正しくついているか。
オプション機能の設定などを確認する。
処 置
内蔵オプションの接続を確実に行う。
通信ケーブルの接続を確認する。
終端抵抗を正しく接続する。
操作パネル表示
E.1
FR-PU07
オプション1 イジョウ
名 称
オプション異常
ドライブユニット本体と内蔵オプション間のコネクタ部の接触不良などが発生した場合、ドライブユニットの出力
内 容
を停止します。
内蔵オプションのメーカ設定用スイッチを変更した場合にも表示されます。
内蔵オプションは確実にコネクタに接続されているか。
チェックポイント ドライブユニットの周囲に過大ノイズが発生していないか。
内蔵オプションのメーカ設定用スイッチを初期状態から変更していないか。
内蔵オプションの接続を確実に行う。
処 置
ドライブユニットの周囲に過大なノイズを発生する装置などがある場合、ノイズ対策を行う。
上記対策をしても改善されない場合は、お買上店または当社営業所までご連絡ください。
内蔵オプションのメーカ設定用スイッチを初期状態に戻す。
(各オプションの取扱説明書参照)
248
原因とその対策
操作パネル表示
名 称
E.OHT
FR-PU07
ガイブ ホゴ(OHタンシ)
外部サーマル動作
外部に設けたモータ過熱保護用サーマルリレーまたはサーマルプロテクタなどが動作(接点開)したとき、ドライブ
内 容
チェックポイント
処 置
操作パネル表示
ユニットの出力を停止します。
Pr.178∼Pr.184 (入力端子機能選択) のいずれかに、設定値7(OH信号)を設定した場合に機能します。初期状態(OH
信号割付けなし)では、この保護機能は機能しません。
モータが過熱していないか。
Pr.178∼Pr.184(入力端子機能選択) のいずれかに、設定値7(OH信号)が正しく設定されているか。
負荷、運転頻度を低減する。
リレー接点が自動復帰しても、リセットしない限りドライブユニットは再始動しません。
E.PE
FR-PU07
パラメータ エラー
パラメータ記憶素子異常(制御基板)
名 称
記憶しているパラメータに異常が発生したとき(EEPROMの故障)
内 容
チェックポイント パラメータの書込み回数が多くないか。
お買上店または当社営業所までご連絡ください。
処 置
通信などで頻繁にパラメータ書込みを行う場合は、Pr.342 の設定値を“1”にしRAM書込みとしてください。ただ
し、RAM書込みですので電源をOFFするとRAM書込み以前の状態に戻ります。
操作パネル表示
E.PE2
FR-PU07
パラメータエラー 2
内部基板異常
名 称
制御基板と主回路基板の組み合わせが正しくない場合にドライブユニットの出力を停止します。
内 容
チェックポイント ―――――――
処 置
操作パネル表示
名 称
お買上店または当社営業所までご連絡ください。
(部品交換については、最寄りの三菱電機システムサービス(株)までお問い合せください。)
E.PUE
FR-PU07
PUヌケ ハッセイ
PU抜け
Pr.75 リセット選択/PU抜け検出/PU停止選択 に設定値“2”、“3”
、
“16”
、“17”を設定したときに、パラメー
タユニットを外すなど本体とPUの交信が中断するとドライブユニットの出力を停止します。
内 容
PUコネクタからのRS-485通信でPr.121 PU通信リトライ回数 ≠「9999」のときに、リトライ許容回数以上連続して
通信エラーが発生するとドライブユニットの出力を停止します。(Pr.502 通信異常時停止モード選択 にて変更可能)
PUコネクタからのRS-485通信でPr.122 PU通信チェック時間間隔 に設定された時間通信が途切れた場合もドラ
イブユニットの出力を停止します。
パラメータユニット(FR-PU07)の接続不良はないか。
チェックポイント
Pr.75 の設定値を確認する。
RS-485通信データは正しいか。また、通信関連のパラメータ設定と計算機の通信設定が合っているか。
Pr.122 PU通信チェック時間間隔 に設定された時間以内に計算機からデータを送信しているか。
パラメータユニット(FR-PU07)の接続を確実に行う。
処 置
通信データ、通信設定を確認する。
Pr.122 PU通信チェック時間間隔 の設定値を大きくする。または、“9999”(交信チェックなし)に設定する。
操作パネル表示
E.RET
FR-PU07
リトライ カイスウ オーバー
名 称
リトライ回数オーバー
設定したリトライ回数以内に正常に運転再開できなかった場合、ドライブユニットの出力を停止します。
内 容
Pr.67 アラーム発生時リトライ回数 を設定した場合に機能します。初期値(Pr.67 =“0”)の場合、この保護機能は
機能しません。
チェックポイント 異常発生原因の調査
このエラー表示の1つ前のエラーの原因の処置を行う。
処 置
249
異
常
と
そ
の
対
策
に
つ
い
て
5
原因とその対策
エラー 6
E. 6
操作パネル表示
E. 7
FR-PU07
E.CPU
名 称
内 容
チェックポイント
処 置
エラー 7
CPU エラー
CPUエラー
内蔵CPUの通信異常が発生した場合、ドライブユニットの出力を停止します。
ドライブユニットの周囲に過大ノイズを発生している機器などはないか。
端子PC-SD間が短絡されていないか。(E6/E7)
ドライブユニットの周囲に過大なノイズを発生する機器などがある場合、そのノイズ対策を行ってください。
端子PC-SD間の接続を確認してください。(E6/E7)
お買上店または当社営業所までご連絡ください。
操作パネル表示
E.IOH
FR-PU07
トツニュウテイコウカネツ
突入電流抑制回路異常
名 称
突入電流抑制回路の抵抗が過熱すると動作します。突入電流抑制回路の故障
内 容
チェックポイント 電源のON/OFFを繰り返していないか。
処 置
操作パネル表示
名 称
内 容
頻繁にON/OFFを繰り返さない回路としてください。
上記対策をしても改善されない場合は、お買上店または当社営業所までご連絡ください。
E.AIE
FR-PU07
アナログニュウリョクイジョウ
アナログ入力異常
Pr.267 端子4入力選択 の設定と電圧/電流入力切換スイッチの設定が異なる状態で、端子4に電圧(電流)が入力され
た場合に表示します。
チェックポイント Pr.267 端子4入力選択 および電圧/電流入力切換スイッチの設定値を確認してください。(147ページ参照)
電流入力により速度指令を与えるか、Pr.267 端子4入力選択 および電圧/電流入力切換スイッチの設定を電圧入力
処 置
に設定してください。
操作パネル表示
名 称
内 容
E.OS
FR-PU07
カソクド ハッセイ
過速度発生
モータ速度がPr.374 過速度検出レベル を越えた場合にドライブユニットの出力を停止します。
Pr.374 過速度検出レベル の設定値は正しいか。
チェックポイント ドライブユニットの出力側(負荷側)3相(U、V、W)の配線は正しいか。(欠相していないか。)
急加減速ではないか。
Pr.374 過速度検出レベル を正しく設定する。
処 置
配線を正しく行う。
加減速時間を長くする。速度制御ゲインを高くする。モデル適応制御を適用する。
操作パネル表示
名 称
内 容
チェックポイント
処 置
操作パネル表示
名 称
内 容
チェックポイント
処 置
250
E.OSD
FR-PU07
ソクドヘンサ ダイ
速度偏差過大検出
Pr.285 速度偏差過大検出速度 を設定した場合に、負荷の影響などによりモータが加速、減速され、速度指令値通りに
モータの速度を制御できない場合にドライブユニットの出力を停止します。初期状態では、この保護機能は機能しません。
Pr.285 速度偏差過大検出速度 、Pr.853 速度偏差時間 の設定値は正しいか。
負荷の急変はないか。
Pr.285 速度偏差過大検出速度 、Pr.853 速度偏差時間 を正しく設定する。
負荷の急変をなくす。
E.OD
FR-PU07
位置誤差大
位置制御時に、位置指令と現在位置の差が、Pr.427 誤差過大レベル を超えた場合、出力を停止します。
負荷が大きくないか。
Pr.427 誤差過大レベル の設定値は正しいか。
負荷を軽くする。
Pr.427 誤差過大レベル を正しく設定する。
デジタル表示と実文字との対応
操作パネル表示
FR-PU07
E.OA
名 称
内 容
加速度異常
モータ回転速度の加速度が、Pr.375 加速度異常検出レベル を超えた場合、出力を停止します。
負荷の急変はないか。
チェックポイント Pr.375 加速度異常検出レベル の設定値は正しいか。
加減速度の設定は大きくないか。
負荷を軽くする。
Pr.375 加速度異常検出レベル を正しく設定する。
処 置
加減速度が大きく、通常運転で異常発生する場合は、Pr.375 =“9999(異常検出せず)”とする。
操作パネル表示
E.USB
FR-PU07
USBツウシンイジョウ
USB通信異常
名 称
Pr.548 USB交信チェック時間間隔 に設定された時間だけ通信が途切れた場合に、ドライブユニットの出力を停止します。
内 容
チェックポイント USB通信ケーブルを確認する。
Pr.548 USB交信チェック時間間隔 の設定値を確認する。
USB通信ケーブルを確認する。
処 置
Pr.548 USB交信チェック時間間隔 の設定値を大きくする。または、9999にする。
E.SAF
FR-PU07
E.13
FR-PU07
操作パネル表示
名 称
内 容
処 置
ソノタエラー
Safetyカイロイジョウ
エラー 13
内部回路異常
内部回路異常時に表示します。
お買上店または当社営業所までご連絡ください。
注 記
上記に示す以外の表示があった場合は、お買上店または当社営業所までご連絡ください。
5.4 デジタル表示と実文字との対応
異
常
と
そ
の
対
策
に
つ
い
て
操作パネルに表示されるデジタル表示は次に示す英数字と対応します。
実文字
表示
実文字
表示
実文字
0
A
M
1
B
N
2
C
O
3
D
o
4
E
P
5
F
S
6
G
T
7
H
U
8
I
V
9
J
r
L
-
表示
5
251
お困りのときはまず確認してください
5.5 お困りのときはまず確認してください
ポイント
各々のチェックを行い、それでも原因が不明な場合は、パラメータをいったん初期化(初期値)したのち、再度
必要なパラメータを設定し、チェックされることを推奨します。
5.5.1
モータが始動しない
確認箇所
原因
正常な電源電圧が印加されていない。
(操作パネルが表示されてない。)
主回路
モータが正しく接続されていない。
P/+−P1間の短絡片が、はずれている。
始動信号が入力されていない。
対策
参照
ページ
ノーヒューズブレーカ(NFB)、漏電ブレーカ(ELB)、
または電磁接触器(MC)を投入する。
入力電圧の低下、入力欠相の有無、配線を確認する。
ドライブユニットとモータ間の配線を確認する。
P/+−P1間の短絡片を確実に取り付ける。
DCリアクトル(FR-HEL)またはフィルタパックを使用
するときには、端子P/+-P1間の短絡片を外し、DCリ
アクトルを接続します。
始動指令場所を確認して始動信号を入力する。
―
13
28
167
PU運転モード時:
外部運転モード時:STF/STR信号
正転と逆転の始動信号(STF/STR)をどちらか一方のみ
入力信号
正転と逆転の始動信号(STF、STR)が両方とも入力さ
ONする。
れている。
初期設定でSTF、STR信号が同時にONすると、停止指
速度指令がゼロになっている。
速度設定に端子4を使っているとき、AU信号がONさ
れていない。
出力停止信号(MRS)、またはドライブユニットリセッ
令になります。
速度指令場所を確認して速度指令を入力する。
AU信号-ONとする。
AU信号をONすると端子4入力が有効となります。
MRS、またはRES信号-OFFとする。
ト信号(RES)がONの状態になっている。
MRS、またはRES信号をOFFすると、始動指令、速度
(MRS信号-ONの状態では、操作パネルのRUNのLED
指令に従って運転します。
が点滅します。)
安全を確認してからOFFしてください。
制御ロジック切換えジャンパコネクタが間違いなく装
シンク、ソースのジャンパコネクタの選択が間違って
着されているか確認する。
いる。
間違った装着がされている場合、入力信号が認識され
アナログ入力信号(0∼5V/0∼10V、4∼20mA)に対し
Pr.73、Pr.267 と電圧/電流入力切換スイッチを正し
て電圧/電流入力切換スイッチの設定が間違っている。
く設定し、設定に合ったアナログ信号を入力する。
147
167
147
16
18
ません。
外部運転時は、PUから
を押した。
(操作パネル表示が
(PS)となっている。)
2ワイヤ式、3ワイヤ式の接続が間違っている。
Pr.78 逆転防止選択 が設定されている。
パラメータ
設定
252
Pr.79 運転モード選択 の設定が間違っている。
入力で停止させた場合の
再始動方法を確認する。
接続を確認する。
3ワイヤ式の場合は、STOP信号を接続してください。
Pr.78 の設定を確認する。
Pr.78 は、モータの回転方向を一方向のみに限定したい
場合に設定します。
始動指令、速度指令の入力方法にあった運転モードの
バイアス、ゲイン(校正パラメータC2∼C7) の設定が適
設定を行う。
バイアス、ゲイン(校正パラメータC2∼C7) の設定を確
切でない。
認する。
16
243
124
161
167
152
お困りのときはまず確認してください
確認箇所
原因
Pr.13 始動速度 の設定値が運転速度より大きくなって
いる。
いる。
設定
特に、Pr.1 上限設定 がゼロとなっている。
JOG運転時に、Pr.15 JOG速度設定 の設定値が、
Pr.13 始動速度 より低い値が設定されている。
運転モードと書込みデバイスが一致していない。
Pr.250 停止選択 により始動信号動作選択が設定され
ている。
PMテスト運転に設定している。
負荷が重すぎる。
軸が拘束された状態になっている。
負荷
操作パネル表示がエラー内容表示(E.OC1など)になっ
その他
5.5.2
参照
ページ
運転速度をPr.13 より大きく設定する。
速度設定信号がPr.13 未満の場合、ドライブユニットは
111
ゼロ速制御となります。
各種運転速度(3速運転など)の速度設定がゼロとなって
パラメータ
対策
ている。
用途にあわせて速度指令の設定を行う。
Pr.1 の設定は使用する速度以上に設定します。
Pr.15 JOG速度設定 の設定値は、Pr.13 始動速度 の設
定値以上の値とする。
Pr.79、Pr.338、Pr.339、Pr.550、Pr.551 を確認し、
98
102
目的にあった運転モードを選択する。
165、
173
Pr.250 設定とSTF、STR信号の接続を確認する。
124
Pr.800 制御方法選択 を“10”に設定する
65
負荷を軽くする。
機械(モータ)を点検する。
保護機能が動作したときは、原因の処置を行ってから、
―
―
ドライブユニットをリセットして、運転を再開してく
241
ださい。
モータ、機械が異常音を発している
確認箇所
入力信号
パラメータ
設定
原因
アナログ入力(端子2、4)による速度指令時、ノイズの
影響を受けている。
対策
ノイズ対策を実施する。
ノイズの影響などにより、安定した運転ができない場
合は、Pr.74 入力フィルタ時定数 を大きくする。
参照
ページ
32
151
Pr.31∼Pr.36(速度ジャンプ) を設定する。
共振が発生している。(回転速度)
機械系の固有振動数による共振を避けて運転したいと
99
きに、共振発生速度をジャンプさせることができます。
パラメータ
測定値が安定するように、比例帯(Pr.129 )を大きく積
設定
分時間(Pr.130 )を長めに、微分時間(Pr.134 )を短めに
PID制御時のゲイン調整が不十分である。
変更する。
211
目標値、測定値の校正を確認する。
その他
モータ
5.5.3
速度制御ゲインが高すぎる。
Pr.820 速度制御Pゲイン の設定値を確認する。
機械のガタつきがある。
機械設備を調整してガタつきをなくす。
―
出力欠相状態で運転している。
モータ配線を確認する。
―
モータのメーカにお問い合わせください。
モータが異常に発熱する
確認箇所
モータ
主回路
―
70
原因
対策
参照
ページ
モータ周辺に所定の間隔があいていない。
モータの周囲環境を改善する。
―
取付けフランジが小さい。
フランジサイズを大きくする。
―
ドライブユニット出力電圧(U、V、W)のバランスがとれ
ドライブユニットの出力電圧を確認する。
ていない。
モータの絶縁を確認する。
モータ電流が大きい
「5.5.10 モータ電流が大きい」を参照してください。
異
常
と
そ
の
対
策
に
つ
い
て
259
255
253
5
お困りのときはまず確認してください
5.5.4
モータの回転方向が逆である
確認箇所
原因
出力端子U、V、Wの相順が間違っている。
主回路
入力信号
設定
5.5.5
モータの出力軸回転方向の仕様を確認する。
始動信号(正転、逆転)の接続が間違っている。
接続を確認する。(STF:正転始動、STR;逆転始動)
Pr.73 アナログ入力選択 設定による可逆運転時に速度
Pr.40 RUNキー回転方向選択 の設定が間違っている。
Pr.125、Pr.126、C2∼C7 の設定値を確認する。
152
Pr.40 の設定を確認する。
228
原因
速度設定信号が間違っている。
入力信号
パラメータ
設定
入力信号線が外来のノイズの影響を受けている。
Pr.1、Pr.2、校正パラメータC2∼C7 の設定が適切で
ない。
Pr.31 ∼ Pr.36(速度ジャンプ) の設定が適切でない。
負荷
パラメータ
設定
負荷が重く、トルク制限機能が動作している。
対策
入力信号レベルを測定する。
入力信号線にシールド線を使用するなどノイズ対策を
実施する。
Pr.1 上限設定、Pr.2 下限設定 の設定を確認する。
校正パラメータC2∼C7 の設定を確認する。
速度ジャンプする範囲を狭くする。
参照
ページ
―
32
98
152
99
負荷を軽くする
―
Pr.22 トルク制限動作レベル を負荷に合わせて高く設
定する。(Pr.22 の設定を高くしすぎると、過電流ア
95
ラーム(E.OC□)が発生しやすくなります。)
モータ
ドライブユニットとモータの容量選定を確認する。
―
加減速がスムーズでない
確認箇所
原因
負荷が重く、トルク制限機能が動作している。
パラメータ
対策
参照
ページ
負荷を軽くする
―
Pr.22 トルク制限動作レベル を負荷に合わせて高く設
定する。(Pr.22 の設定を高くしすぎると、過電流ア
95
ラーム(E.OC□)が発生しやすくなります。)
ドライブユニットとモータの容量選定を確認する。
設定
加減速時間の設定値が短い。
加減速時間の設定値を長くする。
回生回避動作時に速度が不安定になる場合は、Pr.886
回生回避動作中である。
5.5.7
参照
ページ
13
13
16
回転速度が設定の値に対し大きく異なる
確認箇所
5.5.6
出力側(端子U、V、W)は正しく接続する。
減速機により出力軸の回転方向が変わっている。
指令の調整が適切でない。
パラメータ
対策
回生回避電圧ゲイン の設定値を小さくする。
―
108
218
運転中に回転速度が変動する
確認箇所
原因
対策
Pr.74 入力フィルタ時定数 でアナログ入力端子にフィ
速度設定信号が誘導ノイズの影響を受けている。
入力信号
ルタを入力する。
入力信号線にシールド線を使用するなどノイズ対策を
実施する。
トランジスタ出力ユニット接続時などに、回り込み電
端子PC(ソースロジック時:端子SD)をコモン端子とす
流で誤動作している
ることにより、回り込み電流による誤動作を防止する。
多段速指令信号がチャタリングしている。
信号がチャタリングしないよう対策する。
参照
ページ
151
32
18
―
回生回避機能、トルク制限動作など、自動制御系の機
パラメータ
設定
負荷側の剛性が低い場合など、振動系が構成されてハ
ンチングしている。
能設定を無効にする。
PID制御の場合、Pr.129 PID比例帯、Pr.130 PID積分
時間 の設定を小さくする。
制御ゲインを下げて安定性を上げるよう調整する。
254
―
お困りのときはまず確認してください
5.5.8
運転モードの切り換えが正常に行われない
確認箇所
原因
対策
参照
ページ
STF、STR信号がOFFの状態になっていることを確認
入力信号
始動信号(STF、STR)がONしている。
する。
STF、STR信号がONになっていると運転モードの切り
165
換えが行われません。
Pr.79 運転モード選択 の設定値が「0」(初期値)は、入力電
源ONと同時に外部運転モードになり、操作パネルの
を押す(パラメータユニット(FR-PU07)の場合は
パラメータ
Pr.79 の設定値が適切でない。
165
を押す)とPU運転モードに切り換わります。その他
設定
の設定値(1∼4、6、7)の場合は各々の内容で運転モード
が限定されます。
運転モードと書込みデバイスが一致していない。
5.5.9
Pr.79、Pr.338、Pr.339、Pr.550、Pr.551 を確認し、
目的にあった運転モードを選択する。
165、
173
操作パネルが表示しない
確認箇所
主回路
原因
対策
確実な配線、据付けが行われていない。
確実な配線、据付けが行われているか確認する。
端子P/+-P1間の短絡片は確実に取り付けられているか
参照
ページ
12
確認する。
主回路
制御回路
パラメータ
設定
12
電源が入力されていない。
電源を入力する。
PU運転モード時の指令権が操作パネルにない。
Pr.551 PUモード操作権選択 の設定を確認する。
(Pr.551 =“9999”(初期値)でパラメータユニット
(運転モード表示(
(FR-PU07)を接続すると、運転モード表示
)が全て消灯)
(
173
)が全て消灯します。)
5.5.10 モータ電流が大きい
確認箇所
パラメータ
設定
原因
負荷が重く、トルク制限機能が動作している。
対策
参照
ページ
負荷を軽くする
―
Pr.22 トルク制限動作レベル を負荷に合わせて高く設
定する。(Pr.22 の設定を高くしすぎると、過電流ア
95
ラーム(E.OC□)が発生しやすくなります。)
ドライブユニットとモータの容量選定を確認する。
―
異
常
と
そ
の
対
策
に
つ
い
て
5
255
お困りのときはまず確認してください
5.5.11 回転速度が上昇しない
確認箇所
原因
始動指令や速度指令がチャタリングしている。
アナログ速度指令の配線長が長く電圧(電流)がドロッ
入力信号
プしている。
入力信号線が外来のノイズの影響を受けている。
対策
始動指令や速度指令が正常か確認する。
アナログ入力バイアス・ゲインの校正を行う。
入力信号線にシールド線を使用するなどノイズ対策を
実施する。
Pr.1、Pr.2、校正パラメータC2∼C7 の設定が適切で
Pr.1 上限設定、Pr.2 下限設定 の設定値を確認する。
校正パラメータC2∼C7 の設定を確認する。
ない。
上限速度はPMモータの最大速度(3000r/min)に制限さ
れます。
外部運転時、電圧(電流)入力最大値の設定がされてい
パラメータ
ない。(Pr.125、Pr.126)
設定
負荷が重く、トルク制限機能が動作している。
Pr.125 端子2速度設定ゲイン速度 、Pr.126 端子4速度
設定ゲイン速度 の設定値を確認する。
参照
ページ
―
152
32
98
152
271
98、
152
負荷を軽くする
―
Pr.22 トルク制限動作レベル を負荷に合わせて高く設
定する。(Pr.22 の設定を高くしすぎると、過電流ア
95
ラーム(E.OC□)が発生しやすくなります。)
ドライブユニットとモータの容量選定を確認する。
主回路
―
211
PID制御中は、測定値=目標値となるよう回転速度を自動制御します。
ブレーキ抵抗器を間違えて端子P/+−P1またはP1−
端子P/+−PR間にオプションのブレーキ抵抗器(MRS
PRに接続している。
形、FR-ABR)を接続する。
24
5.5.12 パラメータの書込みができない
確認箇所
原因
対策
参照
ページ
運転を停止する。
入力信号
運転中(STF、STR信号がON)である。
Pr.77 =“0”(初期値)では、停止中のみ書き込み可能
160
です。
外部運転モードにて、パラメータを設定しようとして
いないか。
パラメータ
設定
Pr.77 パラメータ書込選択 によりパラメータ書込み不
可になっている。
Pr.161 速度設定/キーロック操作選択 によりキーロッ
クモードが有効になっている。
運転モードと書込みデバイスが一致していない。
256
PU運転モードにする。
Pr.77 =“2”にて全ての運転モードで運転状態にかか
160
わらず書込み可能にすることもできます。
Pr.77 パラメータ書込選択 を確認する。
160
Pr.161 速度設定/キーロック操作選択 を確認する。
229
Pr.79、Pr.338、Pr.339、Pr.550、Pr.551 を確認し、
165、
173
目的にあった運転モードを選択する。
6
保守・点検時の注意点について
この章では、本製品をお使いいただく上での基本的な「保守・点
検時の注意点について」について説明しています。
注意事項など必ず一読してからご使用ください。
6.1
6.2
1
点検項目 ................................................................................................ 258
主回路の電圧・電流および電力測定法 .............................................. 262
2
3
4
5
6
7
257
点検項目
ドライブユニットは、半導体素子を中心に構成された静止機器ですが、温度・湿度・じんあい・振動などの使用環境の影響
や使用部品の経年変化、寿命などから発生するトラブルを未然に防止するため、日常点検を行う必要があります。
保守・点検時の注意事項
ドライブユニット内部の点検を行う場合は電源を遮断した後でも、しばらくの間は平滑コンデンサが高圧状態にありますの
で、電源遮断後10分以上経過した後にドライブユニット主回路端子P/+-N/-間の電圧がDC30V以下であることをテスタな
どで確認してから行ってください。
6.1 点検項目
6.1.1 日常点検
基本的には、運転中に下記異常がないかチェックします。
(1) モータが設定通りの動きをしているか。
(2) 設置場所の環境に異常はないか。
(3) 冷却系統に異常はないか。
(4) 異常振動、異常音はないか。
(5) 異常過熱、変色はないか。
6.1.2 定期点検
運転を停止しないと点検できない箇所や、定期点検を要する箇所をチェックします。
定期点検については、お買上店または当社営業所までご連絡ください。
(1) 冷却系統に異常はないか。.............エアフィルタなどの清掃
(2) 締付けチェックと増し締め ...........振動、温度変化などの影響で、ねじ、ボルトなど締付け部がゆるむことがありますの
でよく確認の上実施してください。
また、締付けは締付けトルク(14、20ページ参照) に従って締め付けてください。
(3) 導体、絶縁物に腐食、破損はないか。
(4) 絶縁抵抗の測定
(5) リレーのチェックと交換。
258
点検項目
6.1.3
点検箇所
日常点検および定期点検
点検項目
周囲環境
全 般
装置全般
電源電圧
全般
接続導体・電線
主回路
端子台
点検事項
点検周期
お客様
異常発生時の処置方法
日常 定期
チェック欄
周囲温度、湿度、じんあい、有害ガス、オイルミスト等を確認
○
異常振動、異常音はないか
○
異物、オイルの付着等汚れはないか
○
主回路電圧は正常か
○
(1) メガーチェック(主回路端子と接地端子間)
(2) 締付部のゆるみはないか
(3) 各部品に過熱のあとはないか
(4) 汚れがないか
(1) 導体に歪みはないか。
(2) 電線類被覆の破れ、劣化(ひび割れ、変色等)はないか
○
○
○
○
○
○
損傷していないか
○
(1) 液漏れはないか
平滑用アルミ電解 (2) ヘソ(安全弁)は出ていないか、膨らみはないか
(3) 目視および主回路コンデンサ寿命診断による判定
コンデンサ
○
○
動作チェック
制御回路 部
保護回路 品 全体
チ
ェ
アルミ電解
ッ
コンデンサ
ク
冷却系統 冷却フィン
表示
表 示
負荷
モータ
電源を点検する
メーカに連絡する
増し締めする
メーカに連絡する
清掃する
メーカに連絡する
メーカに連絡する
装置を停止し、メーカへ
連絡する
メーカに連絡する
メーカに連絡する
○
(259ページ参照)
リレー
環境を改善する
異常箇所を確認し、増し
締めを行う
清掃する
動作は正常か、ビビリ音はないか
(1) ドライブユニット単体運転にて、各相間出力電圧はバラン
スしているか
(2) シーケンス保護動作試験で、保護、表示回路に異常はな
いか
○
メーカに連絡する
○
メーカに連絡する
○
メーカに連絡する
(1) 異臭・変色はないか
○
(2) 著しい発錆はないか
(1) コンデンサの液漏れ、変形跡はないか
(2) 目視および制御回路コンデンサ寿命診断による判定
○
○
○
(259ページ参照)
(1) 目詰まりしていないか
(2) 汚れはないか
(1) 正しく表示するか
(2) 汚れはないか
装置を停止し、メーカへ
連絡する
メーカに連絡する
メーカに連絡する
○
○
○
○
メータ
指示値は正常か
○
動作チェック
振動及び運転音の異常な増加はないか
○
清掃する
清掃する
メーカへ連絡する
清掃する
装置を停止し、メーカへ
連絡する
装置を停止し、メーカへ
連絡する
ドライブユニットに供給される電源電圧を確認するため、電圧をモニタする装置を設置されることを推奨します。
定期点検周期は、1∼2年を推奨しますが、設置環境により異なります。定期点検については、お買上店または当社営業所までご連絡ください。
ドライブユニットの内部に使用している放熱グリスからオイル分が漏れることがありますが、引火性、腐食性、導電性、人体への影響のないものですの
で、ウエスなどで拭き取ってください。
注 記
液漏れや変形など劣化した平滑用アルミ電解コンデンサ(上表参照)を使用し続けると破裂・破損や火災の原因になりますので
速やかに交換してください。
6.1.4
ドライブユニット部品の寿命表示
制御回路コンデンサ、突入電流抑制回路の各部品の寿命が近づくと自己診断で警報出力できるため、部品交換時期を知る目
安となります。
寿命警報出力による寿命判定の目安
部品
保
守
・
点
検
時
の
注
意
点
に
つ
い
て
判定レベル
主回路コンデンサ
初期容量の85%
制御回路コンデンサ
推定余寿命10%
突入電流抑制回路
推定余寿命10% (電源投入 残り10万回)
6
ポイント
ドライブユニット部品の寿命診断は220ページ を参照して実施してください。
259
点検項目
6.1.5 インバータモジュールおよびコンバータモジュールのチェック方法
<準備>
(1) 外部から接続されている電源線(R/L1、S/L2、T/L3)およびモータ接続線(U、V、W)を外します。
(2) テスタを用意します。(使用レンジは100抵抗測定レンジとします。)
<チェック方法>
ドライブユニットの端子台R/L1、S/L2、T/L3、U、V、W、P/+、N/-の導通状態をテスターの極性を交互に換えて導通状態を計
ることで良否の判定ができます。
注 記
1. 測定時、平滑コンデンサが放電していることを確認のうえ、実施してください。
2. 不導通時は、ほぼ∞の値を示します。平滑コンデンサの影響によって一瞬導通し、∞を示さないことがあります。導通時は、
数∼数十を示します。モジュールの種類、テスタの種類などにより数値は一定しませんが、各項の数値がほぼ等しけれ
ば良好です。
<モジュール各素子の番号とチェック時の端子>
モジュール
D1
D2
D3
モジュール
インバータ・
コンバータ・
テスタ極性
TR1
TR3
TR5
テスタ極性
測定値
R/L1
P/+
不導通
P/+
R/L1
導通
S/L2
P/+
不導通
P/+
T/L3
S/L2
導通
P/+
不導通
P/+
T/L3
導通
U
P/+
不導通
P/+
U
導通
V
P/+
不導通
P/+
V
導通
W
P/+
不導通
P/+
W
導通
D4
R/L1
N/-
導通
N/-
R/L1
不導通
S/L2
N/-
導通
D5
D6
TR4
TR6
TR2
コンバータ
モジュール
測定値
N/- S/L2
T/L3 N/-
不導通
N/-
T/L3
不導通
U
N/-
導通
U
不導通
V
N/-
導通
N/-
V
不導通
W
N/-
導通
N/-
W
不導通
インバータ
モジュール
TR1
D1
D2
TR3
TR5
D3
R/L1
U
C
導通
N/-
P/+
S/L2
V
T/L3
W
D4
D5
D6
TR4
TR6
TR2
N/-
(アナログ式テスタの場合を示します。)
6.1.6 清掃
ドライブユニットは常に清潔な状態で運転してください。
清掃時には、中性洗剤またはエタノールをしみ込ませた柔らかい布でよごれた部分を軽くふき取ってください。
注 記
アセトン、ベンゼン、トルエン、アルコールなどの溶剤はドライブユニットの表面の溶解塗装のはがれの原因になりますので
使用しないでください。
操作パネル、パラメータユニット(FR-PU07)の表示部などは、洗剤やアルコールをきらいますので、これらで清掃しないでく
ださい。
6.1.7
部品交換について
ドライブユニットは半導体素子をはじめ多数の電子部品から構成されています。
つぎにあげる部品については、構成上あるいは物性上、経年劣化が予想され、ドライブユニットの性能低下や故障へと波及
しますので、予防保全のために定期的に交換する必要があります。
また、寿命診断機能を部品交換の目安としてください。
部品名
寿命目安
主回路平滑コンデンサ
10年
新品と交換(調査の上決定)
基板上平滑コンデンサ
10年
新品基板と交換(調査の上決定)
リレー類
─
調査の上決定
交換方法・その他
寿命目安は年間平均周囲温度40℃とした場合です。(腐食性ガス・引火性ガス・オイルミスト・じんあいのないこと)
出力電流:ドライブユニット定格の80%
注 記
部品交換については、お買上店または当社営業所までお問い合せください。
260
点検項目
(1)
平滑コンデンサ
主回路直流部に平滑用として大容量のアルミ電解コンデンサおよび制御回路に制御電源安定用のアルミ電解コンデンサが使
用されていますが、リップル電流などの影響により特性が劣化します。これは周囲温度と使用条件に大きく影響されますが、
空調された通常の環境条件で使用されている場合は約10年で交換します。
コンデンサの劣化は一定期間を境に急速に進むので,点検期間は最低1年(寿命に近い時期では半年以下が望ましい)に1度点
検を行います。
点検時の外観的な判断基準として
1) ケースの状態:ケースの側面、底面の拡張
2) 封口板の状態:目立った湾曲、極端なひび割れ
3) その他、外装ひび割れ、変色、液漏れがあるかなど、定量的にはコンデンサの定格容量が 80%以下になった時点を寿命
と判断します。
ポイント
主回路コンデンサの寿命診断は220ページ を参照して実施してください。
(2)
リレー類
接触不良などが発生するので、累積開閉回数(開閉寿命)に応じて交換が必要です。
6.1.8
ドライブユニット交換について
制御回路の配線を外さずにドライブユニットを交換することができます。交換前にドライブユニットの配線カバーを取り外
してください。
注 記
ドライブユニット交換は、電源遮断後10分以上経過したのちに、テスタなどで電圧を確認してから行ってください。
交換手順(FR-E720EX-0.75Kの例)
(1) 制御回路端子台の取付けねじを外してください。
制御回路端子を下方向へ引き外してください。
取付けねじ
(2) 制御回路端子台をドライブユニットの制御回路接続コネクタのピンが曲がらないように注意して取り付け、取付けねじ
で固定してください。
取付けねじ
保
守
・
点
検
時
の
注
意
点
に
つ
い
て
6
261
主回路の電圧・電流および電力測定法
6.2 主回路の電圧・電流および電力測定法
ドライブユニットの電源側、出力側の電圧・電流は、高調波を含んでいるので測定器および測定回路によりデータが異なり
ます。
商用周波数の測定器で測定する場合には、次のページの測定器で下図の回路で測定してください。
ドライブユニット出力側に計器などを設置する場合
ドライブユニットとモータ間の配線長が長い場合、線間漏れ電流の影響で、計器やCTが発熱することがありますので電流
定格に余裕をもった機器を選定してください。
ドライブユニットの出力電圧や出力電流を測定・表示させる場合は、ドライブユニットのFM-SD端子出力機能を活用する
ことをお奨めします。
出力電圧
入力電圧
入力電流
出力電流
ドライブユニット
三
相
電
源
W11
Ar
R/L1
U
Au
As
W12
S/L2
V
Av
W13
T/L3
W
Aw
Vv
Vs
At
W21
Vu
Vr
Vt
W22
Vw
P/+ N/-
+
:可動鉄片形
:電流力計形
V
−
測定器
の形式
:可動コイル形
:整流形
測定箇所と測定器の実例
262
モ
|
タ
へ
主回路の電圧・電流および電力測定法
測定箇所と測定器
測定項目
電源電圧
V1
測定箇所
測定器
R/L1-S/L2、
S/L2-T/L3、
可動鉄片形交流電圧計
T/L3-R/L1間
電源側電流
R/L1、S/L2、T/L3の線電
I1
流
R/L1、S/L2、T/L3および
電源側電力
R/L1-S/L2、
P1
S/L2-T/L3、
T/L3-R/L1
備考(測定値の基準)
商用電源
交流電圧許容変動内(268ページ参照)
可動鉄片形交流電流計
デジタルパワーメータ(ドライ
ブユニット対応品)または、
電流力計形単相電力計
P1=W11+W12+W13(3電力計法)
電源電圧と電源側電流と電源側電力を測定し算出する。
電源側力率
[3相電源の場合]
P1
Pf 1 -------------------------- 100 %
3V 1 I 1
Pf1
出力側電圧
V2
出力側電流
I2
U-V、V-W、W-U間
U、V、Wの線電流
出力側電力
U、V、Wおよび
P2
U-V、V-W
整流形交流電圧計、
(可動鉄片形では測定不可)
各相間の差は最高出力電圧の1%以下
近似実効値整流形交流電流計 ドライブユニット定格電流以下各相の差は10%以
下
デジタルパワーメータ(ドラ
イブユニット対応品)または、
電流力計形単相電力計
P2=W21+W22
2電力計法(または3電流計法)
電源の力率と同様算出する。
出力側力率
Pf2
コンバータ出力
周波数設定信号
周波数設定用電源
P2
Pf 2 -------------------------- 100 %
3V 2 I 2
P/+-N/-間
可動コイル計
(テスターなど)
2(+)-5間
本体LED表示点灯1.35 × V1
回生中最大380V
DC0∼10V、4∼20mA
4(+)-5間
10(+)-5間
「5」が
コモン
DC5.2V
最大周波数で約DC5V
(周波数計なしのとき)
T1
周波数計信号
FM(+)-SD間
DC8V
可動コイル形
(テスターなどで可)
T2
(内部抵抗50k以上)
「SD」が
:C0(Pr.900) にて調整
パルス幅T1
コモン
パルス周期T2 :Pr.55 にて設定
(周波数モニタにのみ有効)
始動信号
STF、STR、
選択信号
RH、RM、RL(+)-SD間
リセット
RES(+)-SD間
出力停止
MRS(+)-SD間
オープン時
DC20∼30V
ON時電圧1V以下
導通測定
異常信号
A-C間
可動コイル形
B-C間
(テスターなど)
〈正常時〉 〈異常時〉
A-C間
不導通
導通
B-C間
導通
不導通
出力電圧を正確に測定する場合には、FFTを使用してください。テスタや一般の計測器では正確に測定することができません。
Pr.192 ABC端子機能選択 が正論理の設定値の場合
デジタルパワーメータ(ドライブユニット対応品)で測定することも可能です。
保
守
・
点
検
時
の
注
意
点
に
つ
い
て
6
263
主回路の電圧・電流および電力測定法
6.2.1
電力の測定
ドライブユニットの入力側、出力側共にデジタルパワーメータ(インバータ対応品)を使用します。
または、ドライブユニットの入力側、出力側共電流力計形計器を使用し、2電力計法または3電力計法によって測定します。
特に入力側は電流が不平衡になりやすいので3電力計法で測定されることを推奨します。
下図に各種測定計器による測定値差の一例を示します
3相電力計も電力演算式や2あるいは3電力計方式など測定器の違いによって誤差が生じます。また電流測定側にCTを使用す
る場合や電圧測定側にPTを内蔵している計器ではCT、PTの周波数特性によっても誤差が生じます。
〔測定条件〕
〔測定条件〕
定トルク(100%)負荷、ただし60Hz以上
定出力。モータ3.7kW4極、3電力計法の
定トルク(100%)負荷、ただし60Hz以上
定出力。モータ3.7kW4極、3電力計法の
指示値を100%とした。
指示値を100%とした。
%
120
%
120
100
100
3電力計法(電流力計形)
2電力計法(電流力計形)
クリップACパワーメータ
(平衡3相負荷用)
クランプオン電力計
(ホール素子電力演算形)
80
60
0
20
40
60
80
6.2.2
(1)
3電力計法(電流力計形)
2電力計法(電流力計形)
クリップACパワーメータ
(平衡3相負荷用)
クランプオン電力計
(ホール素子電力演算形)
80
60
0
100 120Hz
ドライブユニット入力電力の測定例
・
20
40
60
80
100 120Hz
ドライブユニット出力電力の測定例
電圧の測定とPTの使用について
ドライブユニット入力側
入力側電圧は正弦波で歪率も非常に小さいので通常の交流計器で精度良く測定できます。
(2)
ドライブユニット出力側
出力側はPWM制御した矩形波電圧のため必ず整流形電圧計を使用します。指針式のテスタは実際よりずっと大きな値を指
示するため、出力側電圧の測定には使用できません。可動鉄片形は高調波分を含んだ実効値を指示するため基本波分より大
きな値となります。操作パネルでのモニタ値はドライブユニットで制御する電圧そのものをモニタする為、正確な値が示さ
れるので、操作パネルでのモニタを推奨いたします。
(3)
PT
PTはドライブユニットの出力側には使用できません。ダイレクト目盛の計器をお使いください。(ドライブユニット入力側
への使用は可能です)
264
主回路の電圧・電流および電力測定法
6.2.3
電流の測定
ドライブユニットの入力側は可動鉄片形計器、出力側は近似実効値整流形計器を使用します。
ドライブユニット入力側電流は不平衡になりやすいため3相共測定されることをおすすめします。1相や2相では正しい値を
測定できません。一方出力側電流は各相の不平衡率が10%以内に入っている必要があります。
クランプ電流計を使用の場合は必ず実効値検波方式のものを使用します。平均値検波方式のものは誤差が大きく、実際の値
より大幅に小さな値を示すことがあります。操作パネルでのモニタ値は、出力周波数が変化しても正確な値が示されるので、
操作パネルでのモニタ(もしくはアナログ出力)を推奨いたします。
下図に各種測定計器による測定値差の一例を示します。
〔測定条件〕
近似実効値整流形電流計の指示値を100%とした。
〔測定条件〕
可動鉄片形電流計の指示値を100%とした。
%
120
100
近似実効値
整流形
%
120
クリップAC
パワーメータ
100
80
80
60
60
クリップAC
パワーメータ
近似実効値整流形
クランプメータ
クランプオン
電力計の電流測定
クランプメータ クランプオン
電力計の電流測定
0
20
40
0
60Hz
6.2.4
20
40
60Hz
ドライブユニット出力電流の測定例
ドライブユニット入力電流の測定例
CTおよびトランスデューサの使用について
CTはドライブユニットの入力側、出力側共使用可能ですが、周波数が低くなると誤差が大きくなるため極力大きな負担VA
のものをご使用ください。
トランスデューサをご使用になる場合は高調波の影響を受けにくい実効値演算形をご使用ください。
6.2.5
ドライブユニット入力力率の測定
有効電力と皮相電力から計算で求めてください。力率計では正確に示されません。
ドライブユニットの総合力率
=
有効電力
皮相電力
3電力法で求めた3相入力電力
=
6.2.6
√3 ×V(電源電圧)×I(入力電流実効値)
コンバータ出力電圧(端子P-N間)の測定
端子P-N間にはコンバータの出力電圧がでており可動コイル形計器(テスタ)によって測定できます。電源電圧によって変動
しますが、無負荷時約DC270∼300Vを出力し、力行負荷がかかると電圧が低下します。
減速時などモータからエネルギーが回生される場合は、最大DC400V∼450V近くまで上昇します。
6.2.7
ドライブユニット出力周波数の測定
ドライブユニットの周波数計信号出力端子FM-SD間には出力周波数に比例したパルス列が出力されています。このパルス列
出力を周波数カウンタにて計数するか、あるいはテスタ(可動コイル形電圧計)を用いてパルス列出力電圧の平均値を読みと
ります。テスタにて出力周波数を測定する場合は最大周波数で約DC5Vになります。
周波数計信号出力端子FMの詳細仕様については141ページ を参照してください。
保
守
・
点
検
時
の
注
意
点
に
つ
い
て
6
265
主回路の電圧・電流および電力測定法
6.2.8
メガーテスト
ドライブユニット自体のメガーテストは下図の要領で主回路のみ実施し、制御回路にはメガーテストを行わないでくださ
い。(DC500Vメガーを使用してください。)
電源
DC500V
メガー
R/L1
S/L2
T/L3
モータ
U
V
W
M
ドライブユニット
アース端子
注 記
外部回路のメガーテストを行うときは、ドライブユニットの全端子をはずしてドライブユニットにテスト電圧が加わらない
ように実施してください。
制御回路の通電テストにはテスタ(高抵抗用レンジ)を使用し、メガーやブザーを使用しないでください。
6.2.9
耐圧テスト
耐圧テストは行わないでください。劣化する可能性があります。
266
7
仕 様
この章では、本製品をお使いいただく上での「仕様」について説
明しています。
注意事項など必ず一読してからご使用ください。
7.1
定格 ........................................................................................................ 268
7.2
共通仕様 ................................................................................................ 269
7.3
外形寸法図 ............................................................................................ 270
1
2
3
4
5
6
7
267
定格
7.1 定格
●3相200V電源
形名 FR-E720EX-□□K
適用モータ容量(kW)*
出 定格電流(A)
力 過負荷電流定格
0.1
0.2
0.4
0.75
0.1
0.8
0.2
1.5
0.4
3
0.75
5
150% 60s、200% 3s(モータ定格電流基準、反限時特性)
定格入力
電
交流電圧・周波数
源
交流電圧許容変動
3相 200∼240V 50Hz/60Hz
170∼264V 50Hz/60Hz
周波数許容変動
±5%
保護構造
閉鎖形(IP20)
冷却方式
概略質量(kg)
自冷
0.5
適用モータ容量は、MM-GKRシリーズの容量を示します。
268
0.5
0.7
1.0
共通仕様
7.2 共通仕様
制御方式
PMセンサレスベクトル制御(低速域:高周波重畳制御)
キャリア周波数
10kHz(MM-GKRシリーズモータ駆動時)
始動トルク
200%(初期値)
初期磁極検出時間
約0.1s(始動時またはSON/LX信号起動時に実施)
トルク制限動作レベル
トルク制限動作レベル設定可能(0∼200%可変)、有無の選択可能
制
御
仕 速度制御
様
速度変動率
±0.05%
速度制御範囲
全速度範囲(デジタル入力時速比1:1000)
3r/min/3000r/min(端子2、4:0∼10V/10bit)
速度設定 アナログ入力 6r/min/3000r/min(端子2、4:0∼5V/9bit)
3r/min/3000r/min(端子4:0∼20mA/10bit)
分解能
デジタル入力 1r/min
2点
アナログ速度指令入力 端子2:0∼10V、0∼5V選択可能
端子4:0∼10V、0∼5V、4∼20mA選択可能
加速・減速時間設定
0.01∼360.00s(加速・減速個別設定可能)
加速・減速時間パターン 直線加減速パターン、S字加減速から選択可能
デジタル速度指令入力 操作パネル、パラメータユニットにより入力、周波数設定単位設定可
指令入力方式
位置制御
ポイントテーブル方式、原点復帰により絶対位置指令での位置制御が可能
モータ内部指令分解能 5120〔pulses/rev〕
位置決め精度
±1.8°(機械角:200〔pulses/rev〕の分解能相当、入力電圧200V 配線長5m以内)
通信仕様
内蔵:RS485通信(三菱インバータプロトコル、Modbus-RTUプロトコル)、オプション:CC-Link通信
始動信号
正転・逆転個別、始動信号自己保持入力(3ワイヤ入力)選択可能
入力信号(7点)
多段速度選択、第2機能選択、端子4入力選択、JOG運転選択、外部サーマル入力、ドライブユニット運転
許可信号、PU運転外部インタロック、PID制御有効端子、PU-外部運転切換、予備励磁、出力停止、始動
自己保持選択、押当て制御切換、P/PI制御切換、正転、逆転指令、ドライブユニットリセット、PU-NET
運転切換、外部-NET運転切換、指令権切換、近点ドグ、サーボオン、急停止、正転ストロークエンド、逆
転ストロークエンドから任意の信号をPr.178∼Pr.184(入力端子機能選択) により選択。
運転機能
上下限設定、速度ジャンプ運転、外部サーマル入力選択、正転・逆転防止、遠隔設定、第2機能、多段速運
転、回生回避、運転モード選択、PID制御、計算機リンク運転(RS-485)、Modbus-RTU
運
出力信号
転
オープンコレクタ出力(2点)
仕
リレー出力(1点)
様
運転状態
表示計用
パルス列出力
(最大 2.4kHz:1点)
操作パネル
運転状態
表
示 パラメータユニット
異常内容
(FR-PU07)
ドライブユニット運転中、速度到達、過負荷警報、速度検出、回生ブレーキプリアラーム、電子サーマル
プリアラーム、ドライブユニット運転準備完了、出力電流検出、ゼロ電流検出、PID下限リミット、PID上
限リミット、PID正転逆転出力、電磁ブレーキインタロック、ストロークリミット警報、FIN過熱プリア
ラーム、運転準備完了2、位置決め完了、移動完了、PID制御中、粗一致、原点復帰異常、位置検出、位置
指令作成中、原点復帰完了、リトライ中、寿命警報、異常出力3、電流平均値モニタ、メンテナンスタイ
マ、リモート出力、軽故障出力、異常出力から任意の信号をPr.190∼Pr.192(出力端子機能選択) により選
択。
回転速度(出力周波数)、出力電流(定常)、出力電圧、速度設定値(周波数設定値)、コンバータ出力電圧、回
生ブレーキ使用率、電子サーマル負荷率、出力電流ピーク値、コンバータ出力電圧ピーク値、出力電力、
基準電圧出力、モータ負荷率(トルクモニタ)、理想速度指令、速度指令、PID目標値、PID測定値、モータ
サーマル負荷率、ドライブユニットサーマル負荷率をPr.54 FM 端子機能選択 により選択、パルス列出力
(1440 パルス/s/フルスケール)
回転速度(出力周波数)、出力電流(定常)、出力電圧、速度設定値(周波数設定値)、コンバータ出力電圧、回
生ブレーキ使用率、電子サーマル負荷率、出力電流ピーク値、コンバータ出力電圧ピーク値、出力電力、位
置パルス、積算通電時間、実稼動時間、モータ負荷率(トルクモニタ)、位置指令、理想速度指令、速度指
令、積算電力、PID目標値、PID測定値、PID偏差、ドライブユニット入出力端子モニタ、モータサーマル負
荷率、ドライブユニットサーマル負荷率より選択可能
保護機能の動作時に異常内容を表示、異常内容8回分を記憶
(保護機能動作直前の出力電圧・電流・回転速度(周波数)・積算通電時間)
対話式ガイダ
ファンクション(ヘルプ)機能による操作ガイド
ンス
保護機能
加速中過電流、定速中過電流、減速中過電流、加速中過電圧、定速中過電圧、減速中過電圧、ドライブユ
ニット保護サーマル動作、モータ保護サーマル動作、フィン過熱、入力欠相、トルク制限による停止、始
動時出力側地絡過電流、出力欠相、外部サーマル動作、オプション異常、パラメータエラー、PU抜
け発生、リトライ回数オーバー 、CPU異常、ブレーキトランジスタ異常、突入抵抗過熱、アナログ入力
異常、USB通信異常、脱調検出、過速度、速度偏差過大検出、位置誤差大、加速度異常、内部基板異常、内
部回路異常
警報機能
過電流トルク制限、過電圧トルク制限、PU停止、パラメータ書込みエラー、回生ブレーキプリアラーム、
電子サーマルプリアラーム、メンテナンス出力、不足電圧、原点セットミス、原点復帰未完、操作パネ
ルロック、パスワード設定中、ドライブユニットリセット中
保護・警報機能
周囲温度
−10℃∼+50℃(凍結のないこと)
周囲湿度
90%RH以下(結露のないこと)
環
保存温度
境
雰囲気
標高・振動
仕
様
−20℃∼+65℃
屋内(腐食性ガス・引火性ガス・オイルミスト・じんあいのないこと)
海抜1000m以下・5.9m/s2以下、10∼55Hz(X、Y、Z各方向)
0∼100%負荷変動時
オプションのパラメータユニット(FR-PU07)のみ表示可能です。
初期状態の場合、この保護機能は機能しません。
周囲温度が40℃以下で使用する場合は密着取付け(間隔0cm)できます。
輸送時などの短時間に適用できる温度です。
7
269
外形寸法図
7.3 外形寸法図
●FR-E720EX-0.1K∼0.75K
5
内蔵オプション装着時
118
128
φ5穴
定格
名板
容量名板
5
5
定格
名板
D1
56
68
4
4
D1
D
D2*
* FR-A7NC Eキット装着時は、前面に端子台が出るので、
奥行き寸法が約2mm大きくなります。
ドライブユニット形名
D
D1
D2
80.5
10
95.6
FR-E720EX-0.4K
112.5
42
127.6
FR-E720EX-0.75K
132.5
62
147.6
FR-E720EX-0.1K、0.2K
●パラメータユニット(オプション)(FR-PU07)
<外形図>
(14.2)
<パネルカット寸法図>
25.05
(11.45)
2.5
83
40
40
*1
ヌキ穴
51
50
*1
(単位:mm)
4-R1
*1
57.8
67
56.8
135
*1
26.5
4-φ4穴
26.5 (取付けねじ有効深さ5.0)
M3ネジ *2
80.3
FR-PU07を盤などに取り付ける場合、ドライブユニット本体へFRPU07を固定するためのねじは、取り外すか、M3ナットによりFRPU07に固定してください。
取付けねじの長さは、取付けねじ有効深さをこえないように選定し
てください。
●盤面操作パネル(オプション)(FR-PA07)
<外形図>
(単位:mm)
<パネルカット寸法図>
22
68
36
45
11
20
22
59
(15.5)
24
2-M3ネジ
(単位:mm)
270
専用PMモータ[MM-GKRシリーズ]仕様
7.4 専用PMモータ[MM-GKRシリーズ]仕様
7.4.1
モータ仕様
標準仕様
MM-GKR 1 3
記号 定格出力(kW)
1∼7
下記参照
記号 定格回転速度(r/min)
3
3000
記号 オイルシール
記号
なし
なし
なし
減速機付きの場合、オイルシール付きはありません。
J
付き ∗1∗2
G0
オイルシール付きは外形寸法が標準と異なります。
詳細については、営業窓口にお問合わせください。
対応機種および詳細仕様については、センサレスサーボカタログを参照してください。
減速機 ∗3
記号
軸端
なし
なし
標準(ストレート軸)
一般産業機械対応
(フランジ取付け)
K
キー溝付き軸
(キー付きまたはキーなし)∗3
D
Dカット軸 ∗3
モータ形名
MM-GKR□□
13
23
43
73
0.1
0.2
0.4
0.75
対応ドライブユニット
FR-E720EX-□K
電源設備容量(kVA)
0.3
0.5
0.9
1.3
0.1
0.2
0.4
0.75
定格出力(kW)
連続特性
定格トルク(N・m)
0.32
0.64
1.3
2.4
0.64
1.3
2.5
4.8
最大トルク(N・m)
3000
定格回転速度(r/min)
3000
最大回転速度(r/min)
3450
瞬時許容回転速度(r/min)
14.9
21.3
43.8
46.0
連続定格トルク時のパワーレート(kW/s)
10極
極数
0.65
1.08
1.94
3.34
定格電流 (A)
1.3
2.2
3.9
6.7
最大電流(A)
0.068
0.19
0.37
1.24
慣性モーメント(×10-4kg・m2)
推奨負荷慣性モーメント比
10倍以下
なし
速度・位置検出器
なし (オイルシール付きも対応可能です。(MM-GKR_J))
オイルシール
130 (B)
耐熱クラス
全閉自冷
構造
IP65
保護構造
0℃∼+40℃(凍結のないこと)、保存:-15℃∼+70℃(凍結のないこと)
周囲温度
80%RH以下(結露のないこと)、保存:90%RH以下(結露のないこと)
周囲湿度
屋内(直射日光が当たらないこと)、腐食性ガス・引火性ガス・オイルミスト・塵埃のないこと
雰囲気
環境条件
海抜1000 m以下
標高
振動
X:49m/s2、Y:49m/s2
V10
振動階級
25
30
30
40
L(mm)
88
245
245
392
軸の許容荷重
ラジアル(N)
59
98
98
147
スラスト(N)
0.4
0.77
1.3
2.7
質量(kg)
上記の特性はドライブユニット定格入力交流電圧のものです(269ページ参照)。電源電圧降下時には出力および定格回転速度は保証できません。
電源設備容量は、電源側インピーダンス(入力リアクトルや電線を含む)の値によって変わります。
昇降軸のようにアンバランストルクが発生する機械では、アンバランストルクが定格トルクの70%以下で使用することを推奨します。
位置制御時のモータの慣性モーメントに対する負荷慣性モーメントの比率です。負荷慣性モーメント比が記載値を超える場合は、営業窓口にお問合せください。
軸貫通部を除きます。減速機付きの場合は減速機部分がIP44相当になります。
軸貫通部
振動の方向は、X:モータ出力軸方向、Y:モータ出力軸と垂直方向です。数値は最大値を示す部分(通常反負荷側ブラケット)の値です。
モータ停止時は、ベアリングにフレッティングが発生しやすくなりますので、振動を許容値の半分程度に抑えてください。
モータ
X
Y
常時オイルミストや油水がかかる環境では、標準仕様のサーボモータは使用できない場合があります。詳細については、営業窓口にお問合せください。
V10とは、モータ単体での振幅が10μm以下であることを示します。測定時のモータ取付け姿勢および測定位置を下図に示します。
上
モータ
測定位置
仕
様
下
軸の許容荷重については、下図を参照してください。軸には表中の値を超える荷重がかからないようにしてください。
表中の値はそれぞれ単独で作用した場合です。
L
ラジアル荷重
スラスト荷重
L:フランジ取付け面から
負荷荷重の中心までの距離
7
271
専用PMモータ[MM-GKRシリーズ]仕様
減速機付き仕様
一般産業機械対応減速機付き:G0
出力
(W)
形名
MM-GKR13G0
100
MM-GKR23G0
200
MM-GKR43G0
400
MM-GKR73G0
750
減速比
実減速比
1/5
1/12
1/20
1/30
1/5
1/12
1/20
1/30
1/5
1/12
1/20
1/30
1/5
1/12
1/20
1/30
42/221
9/104
12/247
24/713
44/217
48/589
32/651
24/713
15/77
9/110
9/189
12/351
19/95
40/475
14/285
25/722
許容負荷
慣性モーメントJ
質量(kg)
慣性モーメント比
(×10-4kg・m2)
(モータ軸換算にて)
0.0720
0.0706
0.0703
0.0768
0.222
0.204
0.201
0.200
0.406
0.390
0.399
0.398
1.37
1.32
1.29
1.28
モータ
慣性モーメントの
10倍以下
項目
1.1
1.1
1.1
1.8
2.5
2.5
2.5
2.5
3.2
3.2
3.8
3.8
5.2
5.2
7.0
7.0
潤滑方式
取付け方向
グリース
(封入済み)
全方向
仕様
取付け方法
出力軸回転方向
バックラッシュ
最大トルク
許容回転速度(モータ軸にて)
保護等級
フランジ取付け
モータ出力軸と同一方向
減速機出力軸にて60分以下
定格トルクの2倍(定格トルクについては271 ページ 参照)
3000r/min(瞬時許容回転速度: 3450r/min)
IP44相当
耐振動
減速機効率
X:29.4 m/s2、Y:29.4 m/s2
80%∼
慣性モーメント値はモータ+減速機のモータ軸換算値です。
記載の範囲を超える場合は、営業窓口にお問合せください。
減速機効率は、減速比により異なります。また、減速機効率は出力トルク、回転速度、温度など使用条件により変動します。
表中の数値は定格トルク、定格回転速度および常温における代表値であり、保証値ではありません。
バックラッシュの単位換算は次のとおりです。1分 = 0.0167°
7.4.2
モータトルク特性
●MM-GKR13
トルク
●MM-GKR23∼73
トルク
200%
200%
短時間運転領域
短時間運転領域
100%
90%
0%
連続運転領域
750r/min
3000r/min
モータ回転速度
入力電圧が低い場合はトルク特性が低下する場合があります。
6r/min以下は連続運転トルク80%となります。
272
100%
連続運転領域
0%
3000r/min
モータ回転速度
付 録
この章では、本製品をお使いいただく上での「付録」について説
明しています。
注意事項など必ず一読してからご使用ください。
273
付録1
サーボからの置換えのお客様へ
付録 1-1 ACサーボとの主な相違点
項目
センサレスサーボ
ACサーボ
JNシリーズ
J4シリーズ
速度制御
位置制御
トルク制御
あり
エンコーダがあるため不要
±0.01%以下
±0.2%以下
エンコーダ
初期磁極検出
デジタル入力
速度変動率
アナログ入力
(負荷変動 0∼100%)
(周囲温度: 25±10℃)
なし
必要(検出時間 約0.1s)
±0.05%以下
速度制御
位置制御
トルク制御
あり
エンコーダがあるため不要
±0.01%以下
±0.5%以下
−
速度制御範囲
1:1000
1:5000(内部速度指令)
指令分解能/エンコーダ分解能
5120pulses/rev
位置決め精度
最大トルク
ダイナミックブレーキ
±1.8°
200%
なし(外部で用意が必要)
制御モード
速度制御
位置制御
131072pulses/rev
(インクリメンタル)
−
300%
内蔵
1:2000(アナログ速度指令)
1:5000(内部速度指令)
4194304pulses/rev
(アブソリュート)
−
350%
内蔵
付録 1-2 サーボからの置換え時の注意事項
制御方式は、PMセンサレスベクトル制御です。エンコーダがないこと等により各種制約事項があります。
ご使用にあたっては、実際の装置で動作確認を実施の上、ご使用いただきますようお願いします。
制約事項
位置決め運転時、センサ(エンコーダ)がない為、サーボOFF及び電源OFFにて原点位置を消失します。必ず再度原点復
帰してください。
低速及び停止時にはトルクリップル、回転ムラがあります。(使用条件、パラメータ設定により変化します。
)
位置決め精度は±1.8°、速度制御範囲は1:1000です。ただし、トルクリップルにより、回転ムラや停止時微振動する場
合があります。その場合は平均位置精度として±1.8°、平均速度制御範囲として1:1000となります。
なお、モータまでの配線長は30mまで使用可能ですが、位置決め精度±1.8°を確保するためには、配線長5m以内、電源
電圧200∼220Vの条件でご使用ください。
中速以上の速度応答は最大100Hzですが、低速域(0.1kW:600r/min以下、0.2∼0.75kW:300r/min以下)は、速度応
答が低下します(50Hz程度)
エンコーダ等のセンサが無い為、位置に関する機械的保護が必要な場合は、外付けで対応する必要があります。
ダイナミックブレーキ回路は内蔵しておりませんので、ダイナミックブレーキが必要な場合は外部で用意ください。
約0.05秒(3000r/min → 0r/min)以下の急減速や、ゼロ速近辺での100%を超えるインパクトトルクによっては、位置
ずれや異常発生の可能性があります。動作をご確認の上、減速時間、速度応答、必要に応じモデル適応制御ゲインを調整
し、位置ずれや異常発生のしない範囲でご使用いただくようお願いします。
モータ構造(サーボモータ HG-KR比較)
MM-GKR13の反負荷側ブラケットサイズが大きくなります。
(サーボモータ:□40、MM-GKR:□43)
〔減速機付き〕取付ボルトの長さが異なります。
〔減速機付き〕ギアヘッドの形状が異なります。
モータ仕様(サーボモータ HG-KR比較)
50Wはラインナップしていません。
MM-GKR13の750r/min以下は連続定格トルク90%となります。
最大トルクが小さくなります。(サーボモータ:350%、MM-GKR:200%)
最高回転速度が低くなります。(サーボモータ:6000r/min、MM-GKR:3000r/min)
慣性モーメントが異なります。(減速機なしの場合、サーボモータ比で0∼16%程度小さいです。)
推奨負荷慣性モーメント比(位置制御時)は小さくなります。(サーボモータ:17∼26倍以下、MM-GKR:10倍以下)
センサ(エンコーダ)はありませんが、保護等級、環境条件は同一となります。
ただし、センサ(エンコーダ)に起因するトラブルは無くなります。
〔減速機付き〕減速機付きの保護等級はIP44です。
その他
電源入力は三相200∼240Vのみです。
温度保護機能は電子サーマルのみです。
(サーボモータ:電子サーマル、エンコーダサーミスタ MM-GKR:電子サーマル)
低速域(0.1kW:750r/min以下、0.2∼0.75kW:300r/min以下)では、高周波重畳制御により高周波音がします。
ドライブユニットとモータ間の配線長は最大30mとなります。
274
付録2
索引
数字
V
V/F 切換え(X18-ON で V/F 制御)(X18 信号).................120
15 速選択(RL、RM、RH の 3 速と組合わせ)
(REX 信号)......................................................................100、120
あ
C
アナログ入力異常(E.AIE).......................................................250
CPU エラー(E. 6、E. 7、E. CPU).......................................250
アナログ入力選択(Pr.73、Pr.267)
.......................................147
CT およびトランスデューサの使用について .........................265
アナログ入力の応答性やノイズ除去(Pr.74)........................151
アラーム履歴(E---).................................................................236
D
DC リアクトル(FR-HEL)を接続する場合 ........................... 28
い
DU/PU、端子 FM のモニタ表示選択(Pr.52、Pr.54、Pr.170、
異常出力 3(電源遮断信号)(Y91 信号)..................... 126、129
Pr.171、Pr.268、Pr.430、Pr.563、Pr.564)......................135
異常出力(ALM 信号)................................................... 126、129
異常表示 ........................................................................... 135、236
E
位置決め完了信号(Y36 信号)................................................126
E.SAF..........................................................................................251
位 置決め 調整 パラメ ータ の設定 (Pr.426、Pr.506、Pr.507、
J
Pr.510、Pr.511、Pr.536、Y36 信号、PBSY 信号、MEND 信
JOG 運転選択 2(JOG2 信号)...............................................102
号、CPO 信号、FP 信号 ) ..........................................................93
JOG 運転選択(JOG 信号)...........................................102、120
位置検出信号(FP 信号)...........................................................126
JOG 運転(Pr.15、Pr.16、JOG 信号、JOG2 信号).........102
位置誤差大(E.OD)...................................................................250
位置指令作成中信号(PBSY 信号).........................................126
M
位置制御原点復帰(Pr.110、Pr.111、Pr.453、Pr.455、Pr.508、
Modbus-RTU 通信仕様(Pr.117、Pr.118、Pr.120、Pr.122、
Pr.509、Pr.532 ∼ Pr.534).......................................................89
Pr.343、Pr.502、Pr.549)......................................................199
位置制御の概要 ............................................................................77
M ダイヤルプッシュ.................................................................... 47
位 置 制 御 の ゲ イ ン 調 整 (Pr.422、Pr.423、Pr.427、Pr.446、
M ダイヤルボリュームモード / キーロック操作選択
Pr.463、Pr.698、Pr.877) .........................................................79
(Pr.161) .....................................................................................229
位置制御の停止動作 (Pr.464、Pr.535)....................................85
移動完了信号(MEND 信号)....................................................126
P
PID 下限リミット(FDN 信号)......................................126、211
インバータモジュールおよび
PID 上限リミット(FUP 信号)......................................126、211
コンバータモジュールのチェック方法 ....................................260
PID 制御 ( 速度制御 )(Pr.127 ∼ Pr.134)...........................211
う
PID 制御動作中(PID 信号)...........................................126、211
運転モード選択(Pr.79)...........................................................165
PID 制御有効端子(X14 信号)......................................120、211
運転モードを簡単設定(簡単設定モード)................................46
PID 正転逆転出力(RL 信号)........................................126、211
PID 測定値 ........................................................................135、211
え
PID 偏差 ............................................................................135、211
遠隔設定機能(Pr.59)..............................................................105
PID 目標値 ........................................................................135、211
遠隔設定(RL、RM、RH 信号)................................... 105、120
PM センサレスベクトル制御の概要 .......................................... 65
PU 運転外部インタロック(X12 信号)........................120、165
お
押当て制御機能 (Pr.512 ∼ Pr.515 、X29 信号 ) ...................87
PU コネクタの配線と構成 ........................................................179
押当て制御切換(X29 信号)....................................................120
PU コネクタへの接続 .................................................................. 22
オプション異常(E.1)...............................................................248
PU コントラスト調整 (Pr.991) ...............................................233
オプション異常(E.OPT).........................................................248
PU 停止(PS)..................................................................157、243
オプション出力端子状態 ...........................................................135
PU 抜け(E.PUE)..................................................157、183、249
オプション入力端子状態 ...........................................................135
PU − NET 運転切換(X65-ON で PU 運転)
(X65 信号).......................................................................120、171
PU −外部運転切換(X16-ON で外部運転)
(X16 信号).......................................................................120、170
か
回生回避機能
(Pr.665、Pr.882、Pr.883、Pr.885、Pr.886)....................218
回生ブレーキ使用率 ........................................................ 118、135
R
RS-485 通信の初期設定と仕様
(Pr.117 ∼ Pr.120、Pr.123、Pr.124、Pr.549)..................182
RUN キー回転方向選択(Pr.40).............................................228
U
回生ブレーキの選択(Pr.30 、 Pr.70).....................................118
回生ブレーキプリアラーム(RBP 信号)..................... 118、126
回生ブレーキプリアラーム(RB)................................ 118、244
回転速度 ( 出力周波数 ) ................................................. 135、140
回転速度検出(FU 信号)............................................... 126、130
USB 通信異常(E.USB)..........................................................251
回転速度の検出(SU、FU 信号、Pr.41 ∼ Pr.43)
................130
回転速度表示と回転数設定(Pr.37、Pr.144).......................134
外部サーマル動作(E.OHT)
.......................................... 113、249
275
外部サーマル入力(OH 信号)....................................... 113、120
出力電流 ............................................................................135、140
外部− NET 運転切換(X66-ON で NET 運転)
出力電流検出(Y12 信号)..............................................126、131
(X66 信号)....................................................................... 120、171
拡張パラメータの表示
出力電流の検出機能
(Y12 信号、Y13 信号、Pr.150 ∼ Pr.153)...........................131
(Pr.160)..................................................................................... 161
出力電流ピーク値 ............................................................135、140
加減速パターン(Pr.29).......................................................... 112
出力電力 ......................................................................................135
加速時間、減速時間の設定(Pr.7、Pr.8、Pr.20、Pr.44、
寿命警報(Y90 信号)......................................................126、220
Pr.45、Pr.147、Pr.375、Pr.791、Pr.792)........................ 108
加速中回生過電圧遮断(E.OV1).................................. 218、246
上下限設定(Pr.1、Pr.2)...........................................................98
加速中過電流遮断(E.OC1).................................................... 245
(X67 信号).......................................................................120、173
加速度異常(E.OA).................................................................. 251
過速度発生(E.OS)................................................................... 250
指令権切換(X67-ON で Pr.338、Pr.339 による指令が有効)
す
ストロークリミット警報(LP 信号).......................................126
過負荷警報(OL 信号)..................................................... 95、126
せ
き
制御回路端子について .................................................................16
機械共振点を避ける(速度ジャンプ)
(Pr.31 ∼ Pr.36)......................................................................... 99
制御回路の配線 ............................................................................20
基準電圧出力 .................................................................... 135、141
制御方法の変更(Pr.800)..........................................................65
基本操作(出荷設定時).............................................................. 45
制御ロジック切換 ........................................................................18
逆転指令(STR 端子 (Pr.179) のみ割付可能)
清掃..............................................................................................260
正転指令(STF 端子 (Pr.178) のみ割付可能)
(STR 信号)...................................................................... 120、124
逆転ストロークエンド(LSN 信号)........................................ 120
(STF 信号).......................................................................120、124
逆転防止選択(Pr.78).............................................................. 161
正転ストロークエンド(LSP 信号)........................................120
急停止(X87 信号)................................................................... 120
積算通電時間 ..............................................................................135
近点ドグ(X76 信号)............................................................... 120
積算電力 ......................................................................................135
ゼロ速制御と予備励磁、サーボオン、サーボロック (Pr.10、
け
Pr.11、Pr.802、LX 信号、SON 信号 ) .................................114
軽故障出力(LF 信号)..........................................126、183、199
ゼロ電流検出(Y13 信号)..............................................126、131
減速、停止中回生過電圧遮断(E.OV3)....................... 218、246
専用外付ブレーキ抵抗器 (MRS 形、FR-ABR) を接続する場合
減速、停止中過電流遮断(E.OC3)......................................... 245
(0.4K 以上)..................................................................................24
原点セットミス警報(HP1).................................................... 244
原点復帰異常(ZA 信号).......................................................... 126
そ
原点復帰完了信号(ZP 信号).................................................. 126
粗一致信号(CPO 信号)...........................................................126
原点復帰未完警報(HP2)........................................................ 244
操作パネルの各部の名称 .............................................................44
操作パネルロック(Hold)..............................................229、242
こ
速度推定ゲイン、電流制御ゲイン (Pr.730、Pr.824、Pr.825)
高速運転指令(RH 信号)............................................... 100、120
76
高調波抑制対策ガイドライン ..................................................... 35
速度制御ゲインの調整 (Pr.820, Pr.821、X44 信号 ) ............70
高力率コンバータ(FR-HC2)の接続 ..................................... 27
速度制御の概要 ............................................................................68
コンバータ出力電圧 .................................................................. 135
速度設定値 ........................................................................135、140
コンバータ出力電圧ピーク値 ................................................... 135
速度設定電圧(電流)のバイアスとゲイン(Pr.125、Pr.126、
コンバータ出力電圧(端子 P-N 間)の測定 .......................... 265
Pr.241、C2(Pr.902) ∼ C7(Pr.905))...................................152
速度到達(SU 信号)........................................................126、130
さ
速度フィードフォワード制御、モデル適応速度制御(Pr.828、
サーボオン(SON 信号).......................................................... 120
Pr.877 ∼ Pr.881).......................................................................73
し
速度変化量設定(Pr.295)........................................................232
実稼動時間.................................................................................. 135
速度偏差過大検出(E.OSD)....................................................250
始動自己保持選択(STOP 信号).................................. 120、124
速度偏差過大(Pr.285、Pr.853)..............................................74
始動時地絡検出有無(Pr.249)................................................ 145
始動信号動作選択
(STF、STR、STOP 信号、Pr.250)..................................... 124
主回路端子の仕様 ........................................................................ 13
主回路端子の端子配列と電源、モータの配線.......................... 13
出力側地絡過電流(E.GF)............................................. 145、248
出力欠相(E.LF)............................................................. 145、248
出力端子機能選択(Pr.190 ∼ Pr.192).................................. 126
出力端子状態 .............................................................................. 135
出力停止(MRS 信号).................................................... 120、122
出力電圧 ..................................................................................... 135
276
た
第 2 機能選択信号 (RT) の動作条件選択(RT 信号)............123
第 2 機能選択(RT 信号)
................................................120、123
耐圧テスト ..................................................................................266
多段速設定による運転
(Pr.4 ∼ Pr.6、Pr.24 ∼ Pr.27、Pr.232 ∼ Pr.239).............100
脱調検出(E.SOT)....................................................................247
端子 4 入力選択(AU 信号)...........................................120、147
端子 FM 校正(校正パラメータ C0(Pr.900))......................141
端子 FM(パルス列出力)の基準について
(Pr.55、Pr.56)..........................................................................140
端子結線図 .................................................................................... 12
な
内部回路異常(E.13)................................................................251
ち
内部基板異常 (E.PE2) ...............................................................249
中速運転指令(RM 信号)...............................................100、120
に
つ
日常点検 ......................................................................................258
通信 EEPROM 書込みの選択(Pr.342).................................186
入出力欠相保護選択(Pr.251、Pr.872)................................145
通信異常時の動作選択(Pr.121、Pr.122、Pr.502)............183
入力欠相(E.ILF)............................................................ 145、247
通信運転時の運転指令権と速度指令権
入力端子機能選択(Pr.178 ∼ Pr.184)..................................120
(Pr.338、Pr.339、Pr.550、Pr.551)....................................173
入力端子状態 ..............................................................................135
通信オプション異常(E.OP1).................................................248
て
定期点検 ......................................................................................258
任意のアラームを発生させる(Pr.997) .................................227
の
ノッチフィルタ(Pr.862、Pr.863、Pr.871)..........................75
停止選択(Pr.250)...................................................................119
低速運転指令(RL 信号)................................................100、120
は
定速中回生過電圧遮断(E.OV2)...................................218、246
配線カバー ......................................................................................5
定速中過電流遮断(E.OC2)....................................................245
パスワード機能(Pr.296、Pr.297)........................................162
停電減速中(Y46 信号)............................................................126
パスワード設定中(LOCd)......................................................242
電圧の測定と PT の使用について ............................................264
パラメータ一覧表 ........................................................................48
電源回生共通コンバータ(FR-CV)の接続 ............................ 28
パラメータ書込みエラー(Er1 ∼ Er4)...................................242
電源高調波 .................................................................................... 34
パラメータ書込禁止選択(Pr.77)...........................................160
電源投入時の運転モードについて(Pr.79、Pr.340)...........172
パラメータ記憶素子異常(制御基板)
(E.PE).......................249
電子ギアの設定(Pr.420、Pr.421).......................................... 92
パラメータ設定値を変更する .....................................................47
電子サーマル負荷率 ..................................................................135
電子サーマルプリアラーム(THP 信号)......................113、126
ひ
表面カバー ......................................................................................5
電子サーマルプリアラーム(TH).................................113、244
電磁ブレーキを動作させる(MBR 信号、Pr.736)..............117
ふ
電線、配線長など ........................................................................ 14
ファン故障出力(FAN 信号)....................................................126
電流の測定 ..................................................................................265
フィン過熱プリアラーム(FIN 信号)........................... 126、247
電流平均値モニタ信号(Pr.555 ∼ Pr.557)..........................224
フィン過熱(E.FIN)..................................................................247
電流平均値モニタ信号(Y93 信号)..............................126、224
ブザー音制御 (Pr.990) .............................................................233
電力の測定 ..................................................................................264
不足電圧(UV)..........................................................................244
部品交換について ......................................................................260
と
突入電流抑制回路異常(E.IOH)..............................................250
フリーパラメータ(Pr.888、Pr.889)....................................226
ドライブユニット運転許可信号(FR-HC2/FR-CV 接続)
ブレーキ開放完了信号(BRI 信号).........................................120
(X10 信号).......................................................................118、120
ドライブユニット運転準備完了 2(RY2 信号).....................128
ブレーキ開放要求(BOF 信号)...............................................126
ドライブユニット運転準備完了(RY 信号).................126、128
ブレーキユニット(FR-BU2)の接続 ......................................26
ドライブユニット運転中(RUN 信号).........................126、128
ブレーキトランジスタ異常検出(E.BE).................................247
ほ
ドライブユニット過負荷遮断 ( 電子サーマル )
ポイントテーブル簡易位置決め機能
............................................................................113、246
(E.THT)
(Pr.4 ∼ 6、Pr.24 ∼ Pr.27、Pr.465 ∼ Pr.478、Pr.525 ∼
Pr.531、Pr.537、Pr.578 ∼ Pr.591) .......................................81
ドライブユニットから発生するノイズ (EMI) の種類と対策 .. 32
ドライブユニット交換について ...............................................261
ドライブユニットサーマル負荷率 ...........................................135
み
三菱インバータプロトコル
ドライブユニット出力遮断信号(MRS 信号、Pr.17)..........122
ドライブユニット出力周波数の測定 .......................................265
ドライブユニット入出力端子モニタ .............................135、138
(計算機リンク通信)について .................................................187
め
ドライブユニット入力力率の測定 ...........................................265
メガーテスト ..............................................................................266
ドライブユニットの設置環境 ....................................................... 6
メンテナンス信号出力(MT)........................................ 223、244
ドライブユニットの配置............................................................... 9
メンテナンスタイマ警報(Pr.503、Pr.504)
.........................223
ドライブユニット盤の冷却方式の種類 ....................................... 8
メンテナンスタイマ信号(Y95 信号).......................... 126、223
ドライブユニット部品の寿命表示(Pr.255 ∼ Pr.259).......220
ドライブユニットリセット中(Err.).............................240、243
も
ドライブユニットリセット(RES 信号)......................120、240
モータ過負荷遮断 ( 電子サーマル )(E.THM)............ 113、246
トルク制限動作(Pr.22、Pr.48、Pr.156、Pr.157).............. 95
モータサーマル負荷率 ...............................................................135
トルク制限(E.OLT)........................................................95、247
モータ始動速度(Pr.13)...........................................................111
トルク制限(過電圧)
(oL)............................................218、243
モータトルク ..............................................................................135
トルク制限(過電流)
(OL).............................................95、243
モータの過熱保護(電子サーマル)(Pr.9)............................113
277
モータ負荷率 .............................................................................. 135
漏れ電流とその対策 .................................................................... 30
り
リセット選択/ PU 抜け検出/ PU 停止選択
(Pr.75)....................................................................................... 157
リトライ回数オーバー(E.RET)................................... 143、249
リトライ機能(Pr.65、Pr.67 ∼ Pr.69)................................ 143
リトライ中(Y64 信号).................................................. 126、143
リモート出力機能
(REM 信号、Pr.495、Pr.496)............................................... 133
リモート出力(REM 信号)............................................ 126、133
278
改
訂
履
歴
*取扱説明書番号は、本説明書の裏表紙の左下に記載してあります。
印刷日付
2013 年 5 月
2013 年 8 月
取扱説明書番号
IB( 名 )-0600488-A
IB( 名 )-0600488-B
改 定 内 容
初版印刷
追加
Pr.52 DU/PUメイン表示データ選択 設定値“19”
“26∼31”
、
“36”
、
“37”
、
追加
Pr.128 PID 動作選択 設定値“50”、
“51”
、“60”、
“61”追加
Pr.178 ∼ Pr.184( 入力端子機能選択 ) 設定値“29”、
“76”
、
“86 ∼ 89”追加
Pr.190 ∼ Pr.192( 出力端子機能選択 ) 設定値“24、124”、
“36、136”
、
“38、
138”、
“55、155”、
“56、156”
、
“60、160”
、
“61、161”、
“63、163”追加
Pr.800 制御方法選択 設定値“13”追加
Pr.997 任意アラーム書込み 設定値“211”
、“221”追加
位置制御 機能追加
279
●アフターサービスネットワーク
三菱電機システムサービス株式会社の17拠点が24時間365日受付体制でお応えします。
●24時間受付サービス拠点
●サービス網一覧表(三菱電機システムサービス株式会社)
サービス拠点名
1
〒004-0041 北海道札幌市厚別区大谷地東2-1-18
(011)890-7515
(011)890-7516
3
〒108-0022 東京都港区海岸3-19-22(三菱倉庫芝浦ビル)
(03)3454-5521
(03)5440-7783
神奈川機器サービスステーション
4
〒224-0053 神奈川県横浜市都筑区池辺町3963-1
(045)938-5420
(045)935-0066
関越機器サービスステーション
5
〒338-0822 埼玉県さいたま市桜区中島2-21-10
(048)859-7521
(048)858-5601
新潟機器サービスステーション
6
〒950-8504 新潟県新潟市中央区東大通2-4-10日本生命ビル6F
(025)241-7261
(025)241-7262
7
〒461-8675 愛知県名古屋市東区矢田南5-1-14
(052)722-7601
(052)719-1270
静岡機器サービスステーション
8
〒422-8058 静岡県静岡市駿河区中原877-2
(054)287-8866
(054)287-8484
北陸支店
9
〒920-0811 石川県金沢市小坂町北255
(076)252-9519 (052)719-4337 (076)252-5458
17
16
15
11
7
8
5
4 3
(022)353-7834
10 〒531-0076 大阪府大阪市北区大淀中1-4-13(三菱電機システムサービス関西支社ビル) (06)6458-9728
(06)6458-6911
京滋機器サービスステーション
11 〒612-8444 京都府京都市伏見区竹田田中宮町8番地
(075)611-6211
(075)611-6330
姫路機器サービスステーション
12 〒670-0836 兵庫県姫路市神屋町6-76
(079)281-1141
(079)224-3419
13 〒732-0802 広島県広島市南区大州4-3-26
(082)285-2111
(082)285-7773
岡山機器サービスステーション
14 〒700-0951 岡山県岡山市北区田中606-8
(086)242-1900
(086)242-5300
四国支店
15 〒760-0072 香川県高松市花園町1-9-38
(087)831-3186
(087)833-1240
16 〒812-0007 福岡県福岡市博多区東比恵3-12-16
(092)483-8208
(092)483-8228
SC関西機電支社
9
10
ファックス専用
北海道支店
6
12
時間外修理受付窓口
【機器全般】*2
(022)353-7814
SC中部支社
14
電話番号
〒983-0005 宮城県仙台市宮城野区福室字明神西31
1
13
住所
2
SC東京機電支社
2
番号
SC北日本支社
SC中四国支社
SC九州支社
長崎機器サービスステーション 17 〒852-8004 長崎県長崎市丸尾町4番4号
三菱電機機器製品アフターサービス技
―
術相談ダイヤル【機器全般】*1
*1
平日: 9:00∼19:00、休日(土日祝祭日): 9:00∼17:30
*2
平日: 19:00∼翌 9:00、休日(土日祝祭日): 24時間
(095)818-0700
(052)719-4333
(095)861-7566
―
―
●グローバルFAセンター
ロシアFAセンター
北京FAセンター
英国FAセンター
天津FAセンター
欧州FAセンター
中東欧FAセンター
上海FAセンター
北米FAセンター
韓国FAセンター
広州FAセンター
台湾FAセンター
インドFAセンター
香港FAセンター
メキシコFAセンター
タイFAセンター
アセアンFAセンター
インドネシアFAセンター
ブラジルFAセンター
●ブラジルFAセンター
●上海FAセンター
●アセアンFAセンター
Mitsubishi Electric Do Brasil Comercio E
Mitsubishi Electric Automaiton (China) Ltd.
Mitsubishi Electric Asia Pte. Ltd. ASEAN
Servicos Ltda.
10F, Mitsubishi Electric Automation Center,
Factory Automation Centre
Rua Jussara, 1750 - Bloco B- Sala 01 Jardim
No.1386 Hongqiao Road, Changning District, 307 Alexandra Road #05-01/02, Mitsubishi
Santa Cecilia- CEP 06465-070, Barueri, Sao
Shanghai, China
Electric Bulding, Singapore
TEL. 86-21-2322-3030 FAX. 86-21-2322-3000 (9611#) TEL. 65-6470-2480 FAX. 65-6476-7439
Paulo, Brazil
TEL. 55-11-4689-3000 FAX. 55-11-4689-3016
●北京FAセンター
●インドFAセンター
Mitsubishi Electric Automation (CHINA) Ltd. Beijing Office Mitsubishi Electric India Pvt. Ltd. India Factory ●欧州FAセンター
Unit 908, Office Tower 1, Henderson Centre,
Mitsubishi Electric Europe B.V. Polish Branch
Automation Centre
32-083 Balice ul. Krakowska 50, Poland
Emerald House, EL-3, J Block, M.I.D.C.,
18 Jianguomennei Avenue, Dongcheng
Bhosari, Pune, 411026, Maharastra State,
TEL. 48-12-630-47-00 FAX. 48-12-630-47-01
District, Beijing, China
TEL. 86-10-6518-8830 FAX. 86-10-6518-3907(B/S) India
FAX. 86-10-6518-2938(A/S) TEL. 91-124-463-0300 FAX. 91-124-463-0399 ●ドイツFAセンター
Mitsubishi Electric Europe B.V. German
Branch
●天津FAセンター
●タイFAセンター
Mitsubishi Electric Automation (CHINA) Ltd. Tianjin Office Mitsubishi Electric Automation (Thailand) Co., Gothaer Strasse 8, D-40880 Ratingen, Germany
Ltd.
Unit 2003, Tianjin City Tower, No.35, You Yi
TEL. 49-2102-486-0 FAX. 49-2102-486-1120
Bang-Chan Industrial Estate No.111 Soi
Road, Hexi District, Tianjin, China
TEL. 86-22-2813-1015 FAX. 86-22-2813-1017 Serithai 54, T.Kannayao, A.Kannayao,
●英国FAセンター
Bangkok 10230 Thailand
Mitsubishi Electric Europe B.V. UK Branch
TEL. 66-2906-3238 FAX. 66-2906-3239
Travellers Lane, Hatfield, Hertfordshire, AL10
●広州FAセンター
8XB, UK.
Mitsubishi Electric Automation (CHINA) Ltd.
●インドネシアFAセンター
Guangzhou Office
TEL. 44-1707-28-8780 FAX. 44-1707-27-8695
PT. Mitsubishi Electric Indonesia
Rm.1609, North Tower, The Hub Center,
No.1068, Xin Gang East Road, Haizhu District, JAYA BUILDING FLOOR 11 ROOM L11-A2 ●チェコFAセンター
JL. MH THAMRIN NO.12, KEBON SIRIH,
Guangzhou, China
Mitsubishi Electric Europe B.V. Czech Branch
Avenir Business Park, Radicka 751/113e, 158
TEL. 86-20-8923-6730 FAX. 86-20-8923-6715 MENTENG, JAKARTA PUSAT 10340
TEL. 62-21-31926461 FAX. 62-21-31923942 00 Praha5, Czech Republic
●韓国FAセンター
TEL. 420-251-551-470 FAX. 420-251-551-471
Mitsubishi Electric Automation Korea Co., Ltd. ●北米FAセンター
Mitsubishi Electric Automation, Inc.
3F, 1480-6, Gayang-Dong, Gangseo-Gu,
●ロシアFAセンター
500 Corporate Woods Parkway, Vernon Hills, Mitsubishi Electric Europe B.V. Russian
Seoul, 157-200, Korea
IL 60061, USA
Branch St.Petersburg office
TEL. 82-2-3660-9630 FAX. 82-2-3663-0475
TEL. 1-847-478-2334 FAX. 1-847-478-2253
Piskarevsky pr. 2, bld 2, lit "Sch", BC "Benua",
office 720; 195027, St. Petersburg, Russia
●台湾FAセンター
●メキシコFAセンター
TEL. 7-812-633-3497 FAX. 7-812-633-3499
L : SETSUYO ENTERPRISE CO., LTD.
10F, Mitsubishi Electric Automation Center, Mitsubishi Electric Automation, Inc.
Mariano Escobedo #69, Col.Zona Industrial,
No.1386 Hongqiao Road, Changning
Tlalnepantla Edo. Mexico, C.P.54030
District, Shanghai, China
TEL. 886-2-2299-9917 FAX. 886-2-2299-9963 TEL. 55- 3067-7500
R : Mitsubishi Electric Taiwan Co.,Ltd.
No.8-1.Industrial 16th Road,Taichung
Industrial Park ,Taichung, Taiwan 407, R.O.C.
TEL. 886-(0)4-2359-0688 FAX. 886-(0)4-2359-0689
280
IB(名)-0600488-B
三菱 センサレスサーボ ドライブユニット
〒100−8310
東京都千代田区丸の内2-7-3(東京ビル)
三菱 センサレスサーボ ドライブユニット
お問合せは下記へどうぞ
本社機器営業第二部....〒100-8310
北海道支社...................〒060-8693
東北支社........................〒980-0011
関越支社........................〒330-6034
新潟支店........................〒950-8504
神奈川支社...................〒220-8118
北陸支社........................〒920-0031
中部支社........................〒451-8522
豊田支店........................〒471-0034
関西支社........................〒530-8206
中国支社........................〒730-8657
四国支社........................〒760-8654
九州支社........................〒810-8686
東京都千代田区丸の内2-7-3(東京ビル7階)......................................................................................................................(03)3218-6740
北海道札幌市中央区北2条西4丁目1(北海道ビル).........................................................................................................(011)212-3793
宮城県仙台市青葉区上杉1-17-7(仙台上杉ビル).............................................................................................................(022)216-4546
埼玉県さいたま市中央区新都心11番地2(明治安田生命さいたま新都心ビル ランド・アクシス・タワー )...(048)600-5835
新潟県新潟市中央区東大通2-4-10(日本生命ビル).........................................................................................................(025)241-7227
神奈川県横浜市西区みなとみらい2-2-1(横浜ランドマークタワー ).......................................................................(045)224-2623
石川県金沢市広岡3-1-1(金沢パークビル)........................................................................................................................(076)233-5502
愛知県名古屋市西区牛島6番1号(名古屋ルーセントタワー ).....................................................................................(052)565-3326
愛知県豊田市小坂本町1-5-10(矢作豊田ビル).................................................................................................................(0565)34-4112
大阪府大阪市北区堂島2-2-2(近鉄堂島ビル)....................................................................................................................(06)6347-2821
広島県広島市中区中町7-32(ニッセイ広島ビル) ............................................................................................................(082)248-5445
香川県高松市寿町1-1-8(日本生命高松駅前ビル)...........................................................................................................(087)825-0055
福岡県福岡市中央区天神2-12-1(天神ビル)......................................................................................................................(092)721-2251
●電話技術相談窓口 受付時間※1 月曜∼金曜 9:00∼19:00、土曜・日曜・祝日 9:00∼17:00
対象機種
ドライブユニット/インバータ
電話番号
FREQROLシリーズ
MELSEC-Q/L/QnA/Aシーケンサ一般(下記以外)
MELSEC-FX/Fシーケンサ全般
ネットワークユニット/シリアルコミュニケーションユニット
アナログユニット/温調ユニット/温度入力ユニット/高速カウンタユニット
MELSOFT GXシリーズ
SW□IVD-GPPA/GPPQなど
MELSOFT 統合エンジニアリング環境
MELSOFT iQ Works (Navigator)
MELSOFT MXシリーズ
MELSOFT 通信支援ソフトウェアツール
SW□D5F-CSKP/OLEX/XMOPなど
MELSECパソコンボード
Q80BDシリーズなど
C言語コントローラ/MESインタフェースユニット/高速データロガーユニット
MELSOFT シーケンサプログラミングツール
シーケンサ
052-722-2182
052-711-5111
052-725-2271 ※2
052-712-2578
052-712-2579
052-711-0037
052-712-2370
iQ Sensor Solution
プロセスCPU
MELSEC計装/Q二重化
MELSEC Safety
電力計測ユニット/絶縁監視ユニット
052-712-2830 ※2
QE8□シリーズ
052-719-4557 ※2※3
052-725-2271 ※2
GOT-F900/DUシリーズなど
表示器
GOT1000/A900シリーズなど
MELSOFT GTシリーズ
MELSERVOシリーズ
位置決めユニット/シンプルモーションユニット
モーションCPU (Q/Aシリーズ)
MELSOFT MTシリーズ/MRシリーズ
サーボ/位置決めユニット/モーションコントローラ
ロボット
MELFAシリーズ
052-712-3079 ※2
052-712-2417
052-712-6607
052-721-0100
※1:春季・夏季・年末年始の休日を除く ※2:金曜は17:00まで ※3:土曜・日曜・祝日を除く
●FAX技術相談窓口 受付時間※4 9:00∼16:00(受信は常時※5)
対象機種
上記電話技術相談対象機種
電力計測ユニット/絶縁監視ユニット(QE8□シリーズ)
FAX番号
052−719−6762
084−926−8340
三菱電機FAサイトの「仕様・機能に関するお問い合わせ」もご利用ください。
※4:土曜・日曜・祝日、春季・夏季・年末年始の休日を除く ※5:春季・夏季・年末年始の休日を除く
海外(FAセンター )のお問合せ先は裏面を参照してください。
Refer to the reverse side for the international FA Centers abroad.
IB(名)-0600488-B(1308)MEE
この印刷物は、2013年8月の発行です。なお、お断りなしに仕様を変更することがありますのでご了承ください。
FR-E700EX取扱説明書(応用編)
二重化CPU
MELSOFT PXシリーズ
安全シーケンサ(MELSEC-QSシリーズ)
安全コントローラ(MELSEC-WSシリーズ)
小形・高性能ドライブユニット
三菱 センサレスサーボ ドライブユニット
三菱電機FA機器電話、FAX技術相談
取扱説明書(応用編)
B
FR-E720EX-0.1K∼0.75K
概 要
1
配 線
2
ドライブユニット使用上の注意
3
パラメータ
4
異常とその対策について
5
保守・点検時の注意点について
6
仕 様
7
© Copyright 2026 Paperzz