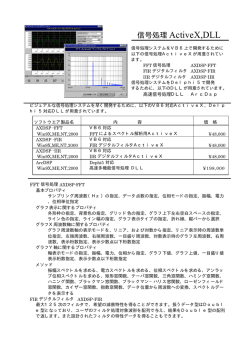
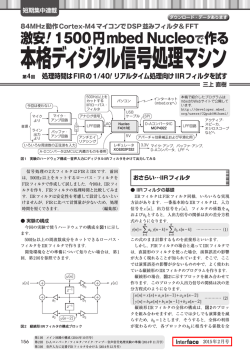
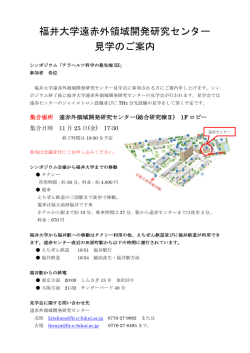
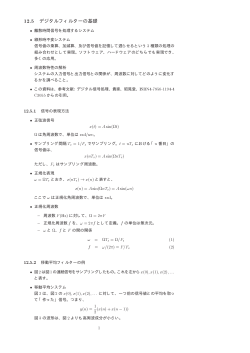
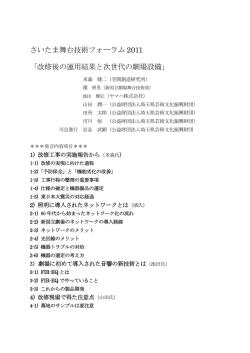
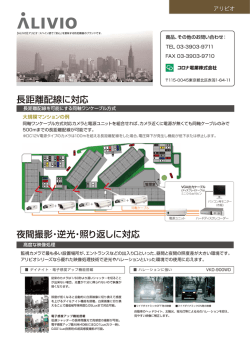
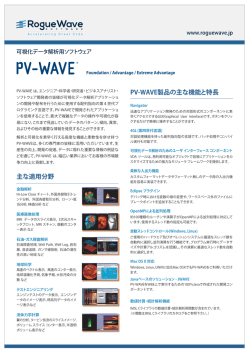
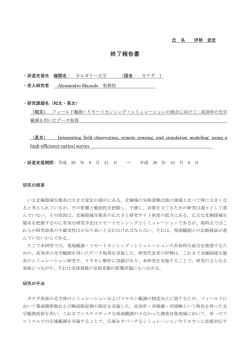
ディジタル信号処理 1 目的 本実験では、ディジタル信号処理特にディジタルフィルタの原理を理解すると共に、ディジ タルフィルタの構成と設計について実験を通して理解を深める。 2 2.1 解説 信号処理について 時間的に変化する物理量 (例えば、電圧や電流・温度) を信号と呼ぶ。信号処理とは、信号の 中から必要な情報を取り出し、不必要な情報を除去し、あるいは信号を他の形態に変換する操 作を言う。このためには、信号に対して何等かの演算を施す必要がある。様々な信号処理の中 で線型フィルタリングとフーリエ変換が最も重要である。 信号処理は、扱われる信号と処理手段によって、アナログ信号処理とディジタル信号処理に 大別される。アナログ信号処理 (図 1(a)) では、連続時間信号が取り扱われ、その処理は、R, L, C, 演算増幅器等のアナログ素子で実行される。その基本動作は微分方程式で記述される。一 方、ディジタル信号処理 (図 1(b)) では、離散時間が取り扱われ、その処理は加算器, 乗算器, 遅 延素子 (メモリ) 等のディジタル回路で行われる。その基本動作は差分方程式で記述される。 ディジタル信号処理とアナログ信号処理を具体的に比較・検討するために、例としてフィル タを取り上げてみよう。まず、図 2(a) のような RC 回路を考えてみる。積分器として知られて いるこの回路は最も単純なアナログフィルタである。このアナログフィルタの入力電圧 u(t) と R C L y(t) u(t) u(t) y(nT) u(nT) 図 1: 信号処理の概念図 y(nT) u(nT) R u(t) z-1 y(t) C a0 -b 1 図 2: (a) アナログフィルタの例、(b) ディジタルフィルタの例 出力電圧 y(t) の関係は RC dy(t) + y(t) = u(t) dt (1) と表わされ、その周波数特性 G(jω) は G(jω) = 1 1 + jωRC (2) である。 このアナログフィルタの周波数振幅特性は |G(jω)| で、周波数位相特性は arg(G(jω)) で与え られる。1 図 3(a) は、R:680Ω, C:0.47µF のときの周波数振幅特性を、図 3(b) は位相特性を描い たものである。図 3(a) から、このアナログフィルタは入力信号 u(t) の低周波成分を通過させ、 高周波成分を除去する働きを有している事がわかる。このような周波数振幅特性を低域通過特 性と呼ぶ。 102 103 -10 R:680Ω C:0.47µF -20 π/2 1 0 -1 −π/2 102 Frequency (Hz) 103 (b) (c) T:0.25ms fc:498Hz -10 Phase (rad) Phase (rad) -20 π/2 1 103 0 fc:498Hz Gain (dB) Gain (dB) 0 102 (a) a0: 0.4389 b1:-0.5611 0 -1 −π/2 102 Frequency (Hz) 103 (d) 図 3: (a) アナログフィルタの振幅特性、(b) アナログフィルタの位相特性、(c) ディジタルフィ ルタの振幅特性、(d) ディジタルフィルタの位相特性 1 G(jω) = 1−jωRC 1+(ωRC)2 , 1 , 1+(ωRC)2 |G(jω)| = √ arg(G(jω)) = arctan Im(G(jω)) Re(G(jω)) = arctan(−ωRC) -4 -2 0 2 4 u(t) 1 (a) 0 y(t) 1 R:680Ω C:0.47µF (b) 0 y(t) 1 a0: 0.4389 b1:-0.5611 T : 0.25ms (c) 0 -4 -2 0 t (ms) 2 4 図 4: フィルタのステップ応答、(a) 入力信号、(b) アナログフィルタのステップ応答、(c) ディ ジタルフィルタのステップ応答 y(0) = 0 の場合、このフィルタのステップ応答は y(t) = 1 − exp(− t ) RC (3) と得られ、図 4(b) に示されている。 さて、式 (1) の微分方程式をディジタル計算機を用いてシミュレートする場合を考えてみよ う。ディジタル計算機の中では連続時間信号 u(t) を直接には取り扱うことはできないので、u(t) を一定時間 T [s] ごとにサンプルした信号 u(0), u(T ), · · · , u(nT ), · · · を用いる。ここで、T はサ ンプリング周期と呼ばれ、充分に小さい値でなければならない。また fs = 1/T はサンプリン グ周波数と呼ばれる。ディジタル計算機による出力も連続時間信号ではなく、離散時間信号と は して得られるので、出力は y(0), y(T ), · · · , y(nT ), · · · と書ける。このとき、式 (1) の微分 dy(t) dt 次のように近似できる。 y(nT ) − y((n − 1)T ) dy(t) ≈ (4) dt T これを用いれば、式 (1) から次の差分方程式が得られる。 y(nT ) = −b1y((n − 1)T ) + a0 u(nT ), n = 0, 1, 2, · · · b1 a0 − RC T = 1 + RC T 1 = 1 + RC T (5) (6) (7) 式 (5) は、出力 y(nT ) が、既に求められている出力 y((n − 1)T ) と入力 u(nT ) の線型結合によっ て得られることを示している。したがって、この差分方程式において、入力 u(nT ) を次々に与 えていけば、y(nT ) が順次求められる。式 (5) の計算をダイアグラムで表わしたものが図 2(b) である。この回路の周波数特性 H(ejωT ) は H(ejωT ) = a0 1 + b1 e−jωT (8) となる事が知られている。図 3(c) に周波数振幅特性 |H(ejωT )| を、図 3(d) に周波数位相特性 arg(H(ejωT )) を示す。これより、図 2(b) のような処理は、入力信号の周波数が 0 ≤ f ≤ fs /2 の 範囲で図 2(a) のアナログフィルタとほぼ同等の働きをしていることがわかる。したがって、図 2(b) のディジタル回路はディジタルフィルタと呼ばれる。y(−T ) = 0 の場合、このディジタル フィルタのステップ応答は y(nT ) = a0[1 − (−b1)n+1 ] , n≥0 1 − (−b1) (9) と求められ、これは図 4(c) に示されている。ディジタルフィルタのステップ応答もアナログフィ ルタのそれに近いことがわかる。 以上のように、アナログ回路によって行われるフィルタリングをディジタル回路によって実 行できる。 2.2 2.2.1 ディジタルフィルタ ディジタルフィルタの基本動作 ディジタルフィルタは、サンプリングにより得られた離散時間信号 u(nT ) を出力するディジ タルシステムであり、その入出力関係は次の畳み込みによって記述される。 y(nT ) = ∞ h(kT )u((n − k)T ) (10) k=0 ここで h(nT ) (n = 0, 1, 2, · · ·) はディジタルフィルタの単位インパルス応答である。 単位インパルス応答 h(nT ) が、ある有限区間においてのみ継続するとき、つまり、ある整数 N に対して、 h(nT ) = 0, n ≥ N (11) が成り立つとき、このフィルタは FIR フィルタ (Finite Impulse Response Filter) と呼ばれる。 したがって、FIR フィルタの基本動作は次の差分方程式によって記述される。 y(nT ) = N −1 h(kT )u((n − k)T ) (12) k=0 = h(0)u(nT ) + h(T )u((n − 1)T ) + · · · + h((N − 1)T )u((n − (N − 1))T ) (13) ここで N を FIR フィルタの次数という。FIR フィルタの特性は単位インパルス応答によって 決定される。例として図 5 に 5 次 FIR フィルタのダイアグラムを示す。 移動平均として知られる 2 次 FIR フィルタは次の式で与えられる。 y(nT ) = u(nT ) + u((n − 1)T ) 2 (14) z-1 u(nT) z-1 h(T) h(0) z-1 h(2T) h(3T) z-1 h(4T) y(nT) 図 5: 5 次 FIR フィルタ 後の議論から明らかなように、この伝達関数は H(z) = 1 + z −1 2 (15) であり、周波数特性は ωT jωT ) cos( ) (16) 2 2 となる。このフィルタの振幅特性 |H(ejωT )| を図 6 に示す。この図から、式 (14) の FIR フィル タは、周波数 0 ≤ f ≤ fs /2 の範囲で低域通過フィルタとなる事がわかる。(fs = 1/T = 4000) 一方、単位インパルス応答が無限の時間継続するフィルタは IIR フィルタ (Infinite Impulse Response Filter) と呼ばれる。IIR フィルタの基本動作は次の差分方程式によって記述される。 H(ejωT ) = exp(− y(nT ) = − N k=1 bk y((n − k)T ) + N ak u((n − k)T ) (17) k=0 ここで N は IIR フィルタの次数である。この差分方程式は、フィルタ出力 y(nT ) が、入力 u(nT ), u((n − 1)T ), · · · , u((n − N )T ) と、既に計算されている出力 y((n − 1)T ), y((n − 2)T ), T:0.25ms Gain (dB) 0 -10 -20 102 Frequency (Hz) 103 図 6: 式 (14) で表される 2 次 FIR フィルタの振幅特性 a0 a1 z-1 u(nT) z-1 y(nT) a2 -b 2 -b 1 図 7: 2 次 IIR フィルタ · · ·, y((n − N )T ) の線型結合によって求められることを表わしている。IIR フィルタの特性は 係数 ak と bk によって決定される。図 7 は、2 次 IIR フィルタのダイアグラムである。図 2(b) の ディジタルフィルタは、1 次 IIR フィルタの例である。 2.2.2 周波数特性 ディジタルフィルタの性質を知る上で、周波数特性は最も重要である。今、FIR フィルタの 入力として複素指数関数 u(nT ) = exp(jωnT ) を入力した場合を考えよう。式 (12) に u(nT ) = exp(jωnT ) を代入すれば次式を得る。 y(nT ) = = = N −1 k=0 N −1 h(kT ) exp(jω(n − k)T ) (18) h(kT ) exp(−jωkT ) exp(jωnT ) (19) k=0 N −1 h(kT ) exp(−jωkT ) exp(jωnT ) k=0 jωT = H(e ここで H(ejωT ) = )u(nT ) N −1 h(kT ) exp(−jωkT ) (20) (21) (22) k=0 とおいた。式 (21) から明らかなように、角周波数 ω の正弦波入力に対する出力は、同じ角周波 数を持つ正弦波となる。しかし、その振幅は |H(ejωT )| であり、位相は arg(H(ejωT )) であり、 これらは入力角周波数 ω の関数である。 H(ejωT ) をこの FIR フィルタの周波数特性と呼び、 特に |H(ejωT )| と arg H(ejωT ) をそれぞれ振幅特性と位相特性という。式 (22) は信号 h(nT ) の フーリエ変換と解釈することもできるので、h(nT ) は次のフーリエ逆変換として与えられる。 T h(nT ) = 2π π T π −T π H(ejωT ) exp(jωnT )dω T (23) IIR フィルタに対しても周波数応答が定義できる。フィルタの入力として u(nT ) = exp(jωnT ) を用いたとき、出力が y(nT ) = H(ejωT )u(nT ) と表わされるものとする。これらの u(nT ) と y(nT ) を式 (17) に代入すれば、IIR フィルタ周波数特性は N H(e jωT )= ak k=0 N 1+ exp(−jωkT ) (24) bk exp(−jωkT ) k=1 と与えられる。 2.2.3 z 変換 アナログ回路の解析やアナログ信号処理においてラプラス変換が重要な役割を果たしている ように、ディジタルの解析やアナログ信号処理においては次に示す z 変換が重要な役割を担う。 ディジタル信号 u(nT ) の z 変換 U (z) は次のように定義される。 U (z) = ∞ u(kT )z −k (25) k=0 ここで z は適当な複素変数である。式 (10) で表わされるディジタルフィルタにおいて、入力 u(nT ), 単位インパルス応答 h(nT ), 出力 y(nT ) の z 変換をそれぞれ U (z), H(z), Y (z) とすれば Y (z) = H(z)U (z) が成立する。ここで H(z) = ∞ h(kT )z −k (26) (27) k=0 である。即ち、ディジタルフィルタの 2 つの信号 u(nT ) と h(nT ) の時間領域における畳み込み は、z 変換領域においてはそれぞれの z 変換の積となる。ディジタルフィルタの入力と出力の z 変換の比を求めれば Y (z) H(z) = (28) U (z) となる。この H(z) をディジタルフィルタの伝達関数と呼ぶ。式 (12) で表わされる FIR フィル タの伝達関数は次式となる。 H(z) = N −1 h(kT )z −k (29) k=0 差分方程式で記述される IIR フィルタの伝達関数も同様に定義でき、 N H(z) = ak z −k k=0 N 1+ (30) bk z −k k=1 となる。 式 (22) と式 (29) 及び式 (24) と式 (30) の比較から明らかな様に、ディジタルフィルタの周波 数特性 H(ejωT ) は、伝達関数 H(z) に z = exp(jωT ) を代入したものに他ならない。この事は、 アナログフィルタの伝達関数 G(s) に s = jω を代入するとそのフィルタの周波数特性が得られ ることに対応している。 T:0.25ms fc:500Hz -10 -20 -30 -10 -20 -30 102 Frequency (Hz) 103 T:0.25ms fc:500Hz 0 Gain (dB) Gain (dB) 0 h0:0.15915 h1:0.22508 h2:0.25000 h3:0.22508 h4:0.15915 102 Frequency (Hz) 10 3 (b) (a) 図 8: (a) 理想的低域通過特性、(b)5 次 FIR フィルタの振幅特性 2.2.4 フィルタの設計 前述のように、伝達関数の係数または単位インパルス応答がディジタルフィルタの特性を決 定する。このため、ディジタルフィルタリングを行うためには、信号処理の目的に合うような フィルタの伝達関数または単位インパルス応答を決定すること、即ちフィルタの設計が必要で ある。ここでは、実験を行うために必要な低域通過フィルタの設計法について説明する。 2.2.5 FIR フィルタの設計 望ましい低域通過フィルタの周波数振幅特性が図 8(a) のような理想的低域通過特性とする。 即ち、 1 |f| ≤ fc jωT Hd (e ) = (31) 0 その他 ここで、T [sec] はサンプリング間隔であり、fc [Hz] は |H(ejωT )| = √12 となる周波数であり、遮 断周波数と呼ばれる。このような特性を有するフィルタの単位インパルス応答は式 (23) のフー リエ逆変換によって求められる。式 (31) を式 (23) に代入すれば T ωc hd (nT ) = exp(jωnT )dω 2π −ωc ωc T sin ωc nT = , n = −∞ ∼ +∞ π ωc nT (32) この単位インパルス応答は n = −∞ ∼ +∞ において継続するので、このままでは FIR フィル タとして実現することはできない。そこで、単位インパルス応答を時間的にシフトさせ、かつ 適当な長さに打ち切ることによって、実現可能な単位インパルス応答 ωc T sin ωc (n − N2−1 )T h(nT ) = π ωc (n − N2−1 )T (33) が得られる。図 8(b) は、fc = 500[Hz], N = 5 の場合の振幅特性を示している。無限に続く理 想的な単位インパルス応答 hd (nT ) を有限の項で打ち切ったことにより、 h(nT ) の周波数特性 は理想的な特性とは異なったものとなる。 2.2.6 IIR フィルタの設計 アナログフィルタの設計法は、これまで多くの研究により非常によく確立している。そこで、 アナログフィルタの伝達関数 G(s) を用いて、これと同等の機能を有するディジタルフィルタの 伝達関数 H(z) を求める方法が考えられる。 ・1 次フィルタの場合 次のアナログフィルタの伝達関数 G(s) を考えよう。 G(s) = 1 1+s (34) このフィルタは低域通過特性を有しており、1[rad/sec] が遮断角周波数 (|G(jω)| = √12 となる角 周波数) である。サンプリング間隔 T [sec] 、遮断角周波数 ωc [rad/s] のディジタルフィルタの伝 達関数 H(z) は、伝達関数 G(s) に 1 − z −1 s = α 1 + z −1 ωc T ) α = cot( 2 (35) (36) を代入することによって得られる。即ち H(z) = a0 + a1z −1 1 + b1 z −1 (37) ここで 1 (1 + α) 1 = (1 + α) (1 − α) = (1 + α) a0 = (38) a1 (39) b1 (40) 式 (36) のような s–z 変換は双 1 次 z 変換と呼ばれる。この伝達関数に対応する差分方程式は y(nT ) = −b1y((n − 1)T ) + a0u(nT ) + a1u((n − 1)T ) (41) となる。図 9(a) に、 fc = 500[Hz] とした場合の H(z) の周波数特性を示す。 ・2 次フィルタの場合 遮断周波数が 1[rad/s] である 2 次アナログフィルタの伝達関数は次式で与えられる。 G(s) = 1 √ s2 + 2s + 1 (42) この伝達関数は、1 次フィルタの場合に比べて特性が優れたものとなる。前述と同様に双 1 次 z 変換を行えば、サンプリング間隔 T [sec] 、遮断周波数 fc [Hz] の 2 次ディジタルフィルタの次の 伝達関数を得る。 a0 + a1z −1 + a2 z −2 H(z) = (43) 1 + b1 z −1 + b2z −2 T:0.25ms fc:500Hz -10 -20 a0: 0.29196 a1: 0.29196 b1:-0.41607 T:0.25ms fc:500Hz 0 Gain (dB) Gain (dB) 0 -10 -20 a0: 0.09699 a1: 0.1940 a2: 0.09699 b1:-0.9468 b2: 0.33475 102 Frequency (Hz) 103 (a) 102 Frequency (Hz) 10 3 (b) 図 9: IIR フィルタの振幅特性、(a)1 次、(b)2 次 ここで ωc T ) 2 1 √ = (1 + 2α + α2 ) = 2a0 α = cot( (44) a0 (45) a1 (46) a2 = a0 (47) b1 = (2 − 2α2 )a0 √ b2 = (1 − 2α + α2 )a0 (48) (49) この伝達関数に対応する差分方程式は y(nT ) = −b1y((n − 1)T ) − b2y((n − 2)T ) + a0u(nT ) + a1u((n − 1)T ) + a2u((n − 2)T ) (50) 図 9(b) に、 fc = 500[Hz] とした場合の H(z) の周波数特性を示す。 3 実験操作 3.1 概要 • 第 1 日目には、RC フィルタおよび、RC フィルタをディジタルフィルタに置き換えたも のの測定をおこなう。測定方法は第 2 日目にも共通するので、注意深く実験すること。 • 第 2 日目は、1 次 IIR フィルタ, 2 次 IIR フィルタ, 2 次 FIR フィルタ, 5 次 FIR フィルタ, の実験をおこなう。 3.2 3.2.1 実験方法 装置の設定 (第 1 日、第 2 日共通) 1. 実験板の設定 (図 10 参照) 実験板のジャックを切り替えて、発振器の信号が RC フィルタへ入り、RC フィルタから PC-9801 CH1 R C CH2 図 10: 実験システム 表 1: オシロスコープの設定 MODE COUPLING SOURCE VERT MODE INV SLOPE TRIGGER LEVEL CH1 POSITION VOLTS/DIV CH2 POSITION VOLTS/DIV AUTO AC CH1 CHOP 押さない + 0 ベースラインが上から 2 目盛りめに 2 AC ベースラインが下から 2 目盛りめに 2 AC HORIZONTAL POSITION VARIABLE SWEEP TIME/DIV ×10 MAG 管面の左端の目盛りから始まるよう CAL 2ms 押さない 表 2: 発振器の設定 AMPLITUDE DC OFFSET DUTY RANGE FUNCTION VOLTS OUT INVERT SWEEP SWEEP RATE SWEEP WIDTH FREQUENCY 8Vp−p になるように調整 押し込んだまま 押し込んだまま 100 正弦波 0–20Vp−p 押し込まない EXT 0 0 約 170Hz 4! 0V 0V ¯! 0V 0V lXXpG` TRIGGER LEVEL ä SOURCE:CH1 (a) (b) 図 11: (a) 測定例 (管面に入力信号が 5 周期表示されている)。(b) 位相の測定。 の出力がオシロスコープの CH2 に入るようにする。 2. オシロスコープの設定 電源を入れて表 1 のように設定する。オシロスコープがきちんと調整されていないとうま く実験できないので、注意深く設定すること。 3. 発振器の設定 電源をいれて表 2 以下のように設定する。 4. コンピュータにフロッピーを入れ電源を入れる。 3.2.2 第1日 RC フィルタ 1. RC フィルタの周波数レスポンスの測定 発振器の周波数を変化させて CH1, CH2 の振幅、CH1 に対する CH2 の位相遅れを測 定し、測定表に書き込む。周波数の合わせかたは測定表に記載してあるように、たと えば 50Hz に合わせる場合はオシロスコープの SWEEP を 10ms/DIV にあわせ、オ シロスコープの CH1 に表示される波数がちょうど 5 個になるように発振器の周波数 を調整する。R : 680Ω, C : 0.47µF である。オシロスコープは CH1, CH2 ともに AC にして測定すること。図 11 参照。 ディジタルフィルタの周波数レスポンスの測定 1. 実験板のジャックを切り替えて、発振器の 信号が A/D コンバータへ入り、D/A コンバータからの出力がオシロスコープの CH2 に入るようにする。 2. サンプリング周期および固有のディレイの測定 (a) プログラム [RC.EXE] を起動する。このときパラメータ a0 = 1、b1 = 0 とする。 (b) 発振器の周波数を約 170Hz、正弦波にし、オシロスコープの HORIZONTAL SWEEP を 0.2ms/DIV にする。CH1, CH2 ともに AC にする。 0V 0V lXXpG` TRIGGER LEVEL Delay 0V 0V lKR TRIGGER LEVEL SOURCE:CH1 SOURCE:CH2 (a) (b) 図 12: (a) サンプリング周期 T の測定。(b) 処理系の固有遅れ Tdelay の測定。 (c) SOURCE を CH2 にし、HORIZONTAL POSITION, TRIGGER LEVEL を調整 し、管面に階段状に表示される CH2 のステップ 7 つ分の時間 (= 7T ) を測定し、 サンプリング周期 T = 7T /7、サンプリング周波数 fs = 1/T を求める。図 12(a) 参照。 (d) SOURCE を CH1 にし、CH1 に対する CH2 のディレイ Tdelay を測定する。Tdelay は入力信号をコンピュータで処理して出力するために必要な時間である。図 12(b) 参照。 以上の数値より a0 = 1 , 1 + RC T b1 = − 1 RC T + RC T (51) , (52) を計算し a0, b1 の値を求める。 3. ディジタル RC フィルタの周波数レスポンスの測定 コンピュータをリセットし再びプログラム [RC.EXE] を起動し、上で計算した数値を 設定する。発振器の周波数を変化させ周波数特性を測定し、測定表に書き込む。測 定する周波数はサンプリング周波数の半分まででよい。オシロスコープは CH1, CH2 ともに AC にして測定すること。 計算およびグラフ化 表にしたがって計算をおこない、 • RC フィルタの周波数特性 (振幅および位相) の理論値と実験値。 • ディジタル処理した RC フィルタの周波数特性 (振幅および位相) の理論値と実験値。 のグラフを描く。 3.2.3 次回までの課題 • カットオフ周波数 500Hz の 1 次 IIR フィルタを設計し、その周波数特性 (振幅特性のみ) を計算しグラフにする。 • カットオフ周波数 500Hz の 2 次 IIR フィルタを設計し、その周波数特性 (振幅特性のみ) を計算しグラフにする。 • カットオフ周波数 500Hz の 2 次 FIR フィルタを設計し、その周波数特性 (振幅特性のみ) を計算しグラフにする。 • カットオフ周波数 500Hz の 5 次 FIR フィルタを設計し、その周波数特性 (振幅特性のみ) を計算しグラフにする。 3.2.4 第2日 • プログラム [IIR.EXE] を起動し、1 次 IIR フィルタとして計算してきたパラメータを設定 し周波数特性 (振幅特性) を測定する。 • プログラム [IIR.EXE] を起動し、2 次 IIR フィルタとして計算してきたパラメータを設定 し周波数特性 (振幅特性) を測定する。 • プログラム [FIR.EXE] を起動し、2 次 FIR フィルタとして計算してきたパラメータを設 定し周波数特性 (振幅特性) を測定する。 • プログラム [FIR.EXE] を起動し、5 次 FIR フィルタとして計算してきたパラメータを設 定し周波数特性 (振幅特性) を測定する。 4 報告書に含まれるべき内容 1. 本実験で用いた全てのディジタルフィルタの振幅特性の理論値を計算し、実験結果と共に 図示し、比較検討したもの。 2. 本実験に関する考察 (次項参照)。 5 考察 以下の項目から 1 つを選び考察せよ。 1. 本実験においては、低域通過型フィルタの設計のみ行ったが、これを基にして高域通過 型・帯域通過型・帯域除去型 IIR フィルタを設計し、その様に実現できる理由とともに考 察せよ。 2. FIR フィルタにおいて、 N = 16 とした場合のインパルス応答を求め、図示せよ。また、 その周波数特性も図示せよ。(T :測定で得た値、fc :500Hz として計算せよ。) 3. アナログフィルタと比較してディジタルフィルタの長所・問題点を列挙し考察せよ。 参考文献 1. 樋口龍雄, 「ディジタル信号処理の基礎」, 昭晃堂 (1986). 2. 石田義久・鎌田弘之, 「ディジタル信号処理のポイント」, 産業図書 (1989).
© Copyright 2026 Paperzz