12.5 デジタルフィルターの基礎
離散時間信号を処理するシステム
線形時不変システム
信号値の乗算、加減算、及び信号値を記憶して遅らせるという 3 種類の処理の
組み合わせとして実現。ソフトウェア、ハードウェアのどちらでも実現でき、
多くの応用。
周波数特性の解析
システムの入力信号と出力信号との関係が、周波数に対してどのように変化す
るかを調べること。
この資料は、参考文献:デジタル信号処理、貴家、昭晃堂、ISBN4-7856-1194-4
C3055 からの引用。
12.5.1 信号の表現方法
正弦波信号
x(t) = A sin( t)
は角周波数で、単位は rad/sec。
サンプリング間隔 Ts = 1=Fs でサンプリング。t = nTs における「n 番目」の
信号値は、
x(nTs ) = A sin( nTs)
ただし、Fs はサンプリング周波数。
正規化表現
! = Ts とおき、x(nTs ) ! x(n) と表すと、
x(n) = A sin( nTs ) = A sin(!n)
ここで ! は正規化角周波数で、単位は rad。
正規化周波数
{ 周波数 F (Hz) に対して、 = 2F
{ 正規化周波数 f を、! = 2f として定義。f の単位は無次元。
{ ! と 、f と F の間の関係
! =
Ts = =Fs
f = !=(2) = F=Fs
(1)
(2)
12.5.2 移動平均フィルターの例
図 2 は図 1 の連続信号をサンプリングしたもの。これを左から x(0); x(1); x(2); : : :
と表す。
移動平均システム
図 3 は、図 2 の x(0); x(1); x(2); : : : に対して、一つ前の信号値との平均を取っ
て「作った」信号。つまり、
1
2
図 3 の波形は、図 2 よりも高周波成分が小さい。
y(n) = (x(n) + x(n 0 1))
1
図 4 は、連続する 3 点の移動平均
1
3
y(n) = (x(n) + x(n 0 1) + x(n 0 2))
図 3 よりもさらに高周波成分が小さい。
ローパスフィルター
移動平均をとると、高周波成分が小さくなり、低周波成分だけが残る。つまり、
信号 x(n) → [移動平均] →低周波成分 y (n)
デジタルフィルター
一般に、サンプリング (と量子化) がなされた離散信号を入力として、演算処理
を行い、新しい離散信号を出力するものをデジタルフィルターという。
図 1: 元の信号
図 2: サンプリングされた信号
図 3: 2 点平均化された信号
図 4: 3 点平均化された信号
正弦波に対する移動平均
図 5、6 は、正弦波信号と、その 5 点平均と 7 点平均とを重ね書きしたもの。こ
れらから分かることは、
{ 出力波形も同じ周期 (周波数) 正弦波である。
{ ただし、振幅が少し小さく、また、波が全体に右に寄っている (位相が遅
れている)。
以上の二つの例から、
{ なぜ平均処理により信号の大きさが変わり、位相がずれるのか?
{ 平均をとる点数と、大きさや位相の変動との関係は?
2
図 5: 正弦波と 5 点平均
図 6: 正弦波と 7 点平均
12.5.3 準備:基本的な信号とその性質
正弦波信号
sin(!n) または cos(!n)
複素正弦波信号
ei!n = cos(!n) + i sin(!n)
i は虚数単位1 。この関係はオイラーの公式と呼ばれる。
この複素正弦波信号は、後述する「周波数特性」を扱う上で重要。
これを用いて、(実数の)正弦波信号を複素正弦波信号で表すことができる。
cos(!n)
=
sin(!n) =
単位ステップ信号 u(n)(図 7(a))
(
u(n) =
インパルス (信号) (n)(図 7(b))
(
(n) =
ei!n + e0i!n
2
ei!n 0 e0i!n
2
n0
0 n<0
1
1
0
n=0
n 6= 0
図 7: 単位ステップとインパルス
3
(3)
図 8: インパルス (n) の性質
12.5.4 インパルスの性質
例) (n 0 2) という信号は n = 2 の時だけ 1 になる信号 (図 8 の (a))
図 8 の (b) のように、x(01) = 01; x(0) = 2; x(2) = 1 でそれ以外は 0 の信
号 x(n) は、インパルスを用いて次のように書くことができる。
x(n) =
上の式は、
x(n) = x(01)(n + 1) + x(0) (n) + x(1) (n 0 1) + x(2)(n 0 2)
と書くこともできる。
一般に、信号 x(n) は、
1
X
x(n) =
k=
01
x(k )(n 0 k)
(4)
のようにインパルスを用いて級数の形で表現できる。
12.5.5 線形・時不変システム
次に信号の変換について考えよう。信号処理システムを入力信号 x(n) を出力
信号 y(n) に一意的に変換するものとして定義し、
y (n) = T [x(n)]
と表す。
変換の条件によって、システムを以下のように分類できる。
時不変 (シフト不変) システム (time-invariant system)
入力 x(n) に対応する出力を y(n) とするとき、任意の整数 k について
y (n 0 k ) = T [x(n 0 k)]
が成立するようなシステム。
例)図 9(a)(b)
1 工学系では記号として j を使うことが多い。
4
図 9: 線形・時不変システムの性質
線形システム (linear system)
任意の入力 x1 (n); x2 (n) に対応する出力をそれぞれ y1 (n); y2 (n) とするとき、
任意の定数 a; b に対して
T [ax1 (n) + bx2 (n)] = aT [x1 (n)] + bT [x2 (n)]
= ay1 (n) + by2 (n)
が成立するようなもの。
例) 図 9(c)
線形時不変システム
線形性と時不変性の条件を同時に満たすとき、線形時不変システム (linear timeinvariant system) と呼ばれる。線形性と時不変は、独立な条件。
因果性システム (causal system)
任意の時刻 n0 における出力 y (n0 ) が、その時刻よりも過去の時刻 n ≦ n0 のみ
の入力 x(n) を用いて計算されるシステムである。
例) 因果性システムではないもの
5
12.5.6 線形時不変システムにおけるたたみ込みとインパルス応答
インパルス応答 (impulse response)
システムにインパルスを入力した場合の出力 h(n):
h(n) = T [(n)]
線形時不変システムでは、システムのインパルス応答 h(n) がわかると、任意
の入力 x(n) に対する出力を次式で求めることができる (証明は後述)。
1
X
y (n) =
k=
01
x(k)h(n 0 k )
(5)
あるいは、m = n 0 k とおくと、
y(n) =
01
X
1
m=
1
X
x(n 0 m)h(m) =
k=
01
h(k)x(n 0 k)
(6)
たたみ込みによるシステムの表現
上式の関係を信号 x(n) と h(n) のたたみ込み (convolution) といい、次のよう
に書く。
y (n) = x(n) ? h(n)
例)3 点平均とたたみ込み
インパルス応答が h(0) = h(1) = h(2) =
1
3
のシステムを求めて見よう。
たたみ込みの導出
式 (5) のたたみ込みの導出のためには、線形性と時不変性の条件が必要である。
まず、システムの入出力関係は、y(n) = T [x(n)] と表現される。これに式 (4)
を代入する。
y (n) = T [x(n)] = T [
1
X
k=
01
x(k) (n 0 k )]
線形性を仮定すると、上式は
y(n) =
1
X
01
1
X
T [x(k) (n 0 k)]
(7)
x(k)T [ (n 0 k)]
(8)
k=
=
01
k=
P の中で x(k) は定数であることに注意。
式 (7) から式 (8) の変形で、
インパルス応答を h(n) = T [(n)] とすると、時不変性から、
h(n 0 k) = T [(n 0 k)]
これを式 (8) に代入して、式 (5) のたたみ込みの式を得る。
例)
図 10
6
図 10: たたみ込みの例
12.5.7 ハードウェアでの実現
演算要素
式 (5) からわかるように、たたみ込みは乗算、加減算、シフト (遅延) という三
つの要素によって実現できる。
図 11 の上図はこれらの要素を示し、図 11 の下図は、次のシステムを実現した
もの。
y(n) = x(n) + 2x(n 0 2)
12.5.8 再帰型システム
次のシステムを考えよう。
y (n) = x(n) + by (n 0 1)
これは右辺に y が現れており、たたみ込みの形をしていない。しかし、このシ
ステムをハードウェアで実現することは可能で、それは図 12 のようになる。こ
こでは、ある時刻の出力を入力として用いてその後の出力を計算している。こ
のような処理をフィードバックといい、フィードバックを含むシステムを再帰
型システムという。
インパルス応答
この図において信号の流れを追いかけることによって、インパルス応答を求め
てみると、時刻 n = 0 から始めて、出力は、1; b; b2 ; b3 ; 1 1 1 と出力が無限に続く
ことが分かる。
IIR と FIR
このように無限個のインパルス応答をもつシステムを IIR (in nite impulse
response) システムといい、逆に有限個のインパルス応答を持つシステムを
FIR( nite impulse response) システムという。移動平均などのシステムは FIR
であった。IIR システムは再帰型であるが、再帰型であっても IIR とならない
ものもある。
前述のようにインパルス応答が分かると、たたみ込みの式 (6) によってシステム
(入力 x(n) に対する出力 y(n)) を記述することができた。再帰型のシステムで
7
図 11: ハードウェアによる実現
図 12: フィードバックのある回路とそのインパルス応答
8
あってもそのようにできる。このシステムのインパルス応答は h(k ) = bk ; (k =
0; 1; 2; : : :) であるから、システムは、
y (n) =
1
X
bk x(n 0 k )
k =0
と無限級数で表現できる。
IIR システムでは安定性に注意
安定性とは、有限の信号値をもつ信号をシステムに入力したときに、出力が必
ず有限の値となるようなシステムである。図 12 のシステムでは、もし jbj > 1
であると、出力が無限大になり、不安定なシステムとなる。
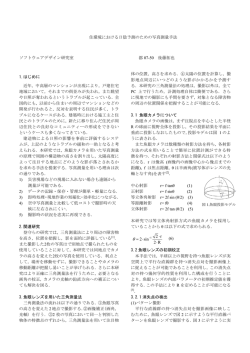
12.5.9 システムの周波数特性
システムを利用するためには、その特性について調べておく必要がある。このよう
な解析を行うには、信号の周波数に着目し、周波数に対するシステムの特性を求めて
やる。これを調べるには、システムに対して、正規化角周波数 ! の (複素) 正弦波信
号を入力し、その出力を求めればよい。
そして、もしすべての周波数についてシステムの周波数特性を調べることができれ
ば、任意の正弦波信号に対する出力を容易に知ることが可能となる。また、詳細は次
節で述べるが、正弦波信号以外の入力に対する出力も、この周波数特性から決定され
る。つまり、インパルス応答と同様に、周波数特性は、線形時不変システムを完全に
記述している。
振幅特性と位相特性
線形時不変システムでは、正弦波信号 x(n) = cos(!n) を入力したとき、出力
信号は、
y (n) = A(!)cos(!n + (! ))
すなわち次のような特徴がある。
{ 出力も同じ周波数 (! ) を持つ正弦波信号である。
{ システムは正弦波信号の大きさ (A(!)) と位相 ( (!)) のみを変える働きが
ある。
{ 大きさ (A(! )) と位相 ((!)) は、周波数 (! ) の関数であり、入力信号の周
波数によって決まる。
システムの周波数特性 (frequency characteristics) とは、次の振幅特性と位相
特性の両方で表現される。
{ 入力と出力の大きさ (振幅) の関係 A(! ) を振幅特性 (amplitude characteristics) といい、
{ 位相の関係 (!) を位相特性 (phase characteristics) という。
複素正弦波信号入力
次に、複素正弦波信号
ei!n = cos(!n) + i sin(!n)
に対する出力を考えてみよう。システムのインパルス応答 h(n) は与えられて
いると仮定すると、出力を求めるにはたたみ込みの式 (6) に上式を代入すれば
9
よい。整理すると、
1
X
y(n) =
01
k=
=
ei!n
h(k)ei!(n0k)
1
X
01
h(k )e0i!k
(9)
k=
=
ei!n H (ei! )
(10)
ここで、H は、式 (9) の 6 の部分は、
H (ei! ) =
1
X
01
h(k )e0i!k
(11)
k=
H を ei! の関数と捉えていることに注意。
この H の値は複素数であるので、
H (ei! ) = A(!)ei(!)
(12)
のように、大きさ A(! ) と偏角 (! ) を用いて極座標表現できる。この式を式
(10) に代入すると、
y ( n)
=
ei!n H (ei! ) = A(!)ei(!n+(!))
つまり、
{ 複素正弦波信号に対する出力信号は、振幅と位相のみが入力信号と異なる。
{ インパルス応答が既知であれば、式 (11) を計算し、式 (12) へ変形するこ
とによって、大きさと位相の特性を知ることができる。(位相の特性を知
るために入力信号は不要)
例)3 点移動平均 y(n) = 13 (x(n) + x(n 0 1) + x(n 0 2)) の振幅特性と位相特
性は、
図 13: 3 点移動平均の周波数特性
10
位相特性のグラフがノコギリ歯のようになっているのは、ei! = ei(!+2) が成立
することから、0 (!) < の範囲で位相特性 (!) を描いているからであ
る。ノコギリ歯のようにせず、01 (! ) < 1 の範囲で直線で描いてもよい。
正弦波信号に対する周波数応答との関係
複素正弦波信号は複素数であり、現実的に我々は正弦波信号を与えたときの周
波数特性に興味がある。システムに正弦波信号を与えたときの周波数特性は、
複素正弦波信号の周波数特性と基本的に一致する。
3 点移動平均の周波数応答
図 13 は、正弦波信号に対する応答も表していることから、次のことが言える。
{ ! = の付近で A(! ) の絶対値が小さくなっている。! = は、周波数で
言うと、F = 2!p i Fs に ! = を代入して F = Fs =2 となる。つまり、サン
プリング周波数の半分あたりで、振幅が小さくなることを示している。こ
れは、先に述べたように高い周波数成分をカットするローパスフィルター
の働きを示している。
{ 位相特性は、周波数に対して線形であり、周波数が高いほど位相が遅れる
ことを示している。
12.5.10 z 変換と伝達関数
ここまでで見たように、システムの周波数特性を求めるには、H (ei! ) を求めれば
よい。前項では、その一つの方法としては、システムのインパルス応答を求めて、式
(11) を計算し、それから式 (12) を導出した。しかし、フィードバックを含む再帰型
システムでは、IIR システムとなることがあり、インパルス応答は無限の長さにな
り、面倒である。そこで通常は、以下で紹介するような z 変換という方法を用いて、
H (ei! ) を求めている。
本節では、z 変換と、この変換法に基づくシステムの伝達関数とシステムの周波数
特性を求める方法について説明する。
離散時間信号 x(n) の z 変換 X (z ) を次式で定義する。
X (z ) =
1
X
n=
01
x(n)z 0n
(13)
ここで、z は複素変数である。いま、表現を簡潔にするために、x(n) の z 変換
が X (z ) であるとき両者の関係を
z
x(n) $
X (z )
または
Z [x(n)] = X (z )
と表す。下では、時間信号を小文字 (x(n))、変換された信号を大文字 (X (z)) で
表現する。
例)インパルス (n) の z 変換
図 14(a) のインパルス (n) の z 変換は 1。
11
例)図 14(b) の信号の 2 (n 0 2) の z 変換
これから、一般に c (n 0 k) の z 変換は cz 0k となることが分かる。ただし、c
は定数。
例) 図 14(c) の信号 x(n) の z 変換
任意の信号 x(n) はインパルスを用いて表現できることから (式 (4))、この例の
ように、インパルスに対する z 変換から容易に任意の信号の z 変換を求めるこ
とができる。
図 14: 信号例
z 変換の性質
z 変換を実際の場面で使いこなすためには、以下に示す z 変換の性質を理解す
る必要がある。z 変換では、常に以下の関係が成立する。
{ 線形性
任意の 2 つの信号 x1 (n); x2 (n) の z 変換をそれぞれ X1 (z ) = Z [x1 (n)]; X2 (z ) =
Z [x2 (n)] とする。このとき、
Z [ax1 (n) + bx2 (n)] = aZ [x1 (n)] + bZ [x2 (n)]
= aX1 (z ) + bX2 (z )
が成立する。ここで、a および b は任意の定数である。
{ 時間シフト
信号 x(n) の z 変換が X (z) = Z [x(n)] であるとき、
Z [x(n 0 k )] = X (z )z 0k ; (k : 任意の整数)
12
が成立する。
たたみ込みと z 変換の積
任意の 2 つの信号 x1 (n); x2 (n) の z 変換をそれぞれ X1 (z ); X2 (z ) とする。この
とき、両者がたたみ込みの関係にあるとき (式 (5))、
x1 (n) ? x2 (n) =
1
X
01
n=
z
x1 (n)x2 (n 0 k ) $ X1 (z )X2 (z )
(14)
が成立する。これは次のようにして導くことが出来る。
y(n) =
1
X
k=
01
x1 (k)x2 (n 0 k) とおいて、これを z 変換すると、
1
X
Z [y(n)] =
n=
01
y (n)z 0n
1 X
1
X
=
(
n=
01
1
X
=
k=
01
x1 (k)x2 (n 0 k))z 0n
1
X
x1 (k)(
x2 (n 0 k)z 0n )
n=01
01
ここで、n 0 k = p とおくと、z 0n = z 0p z 0k となり、これを代入して整理す
k=
ると、
=
1
X
k=
=
k=
=
01
1
X
k=
=
01
1
X
01
x1 (k )(
1
X
x2 (p)z 0p z 0k )
01
1
X
p=
x1 (k )z 0k (
p=
01
x2 (p)z 0p )
x1 (k )z 0k X2 (z )
X1 (z )X2 (z)
システムの伝達関数
ここでは、インパルス応答に代わる表現として、システムの伝達関数を定義す
る。IIR システムのように、インパルス応答では無限の表現が必要になるシス
テムに対しても、伝達関数は有限な表現を与え、表現としてより簡潔である。
伝達関数の定義
システムの伝達関数をシステムのインパルス応答 h(n) の z 変換 H (z ) として定
義しよう。すなわち、
H (z) = Z [h(n)]
さて、線形時不変システムでは、入力信号 x(n)、インパルス応答 h(n) と出力
信号 y(n) の間には、たたみ込みの関係が成立した。
y (n) = x(n) ? h(n) =
1
X
01
h(k)x(n 0 k)
k=
z 変換のたたみ込みの性質から、これを z 変換すると、
Y (z ) = H (z)X (z)
と表現できる。ただし、Y (z ) = Z [y(n)]; H (z) = Z [h(n)]; X (z ) = Z [x(n)] で
ある。ここで、H (z ) をシステムの伝達関数という。
13
したがって、伝達関数 H (z ) は、入出力信号の z 変換の比:
H (z ) =
Y (z )
X (z )
としても計算できる。
非再帰型システムの伝達関数
まず、例として、3 点平均を求めるシステムで伝達関数を二つの方法で求めて
見よう。
1
3
y(n) = (x(n) + x(n 0 1) + x(n 0 2))
のインパルス応答は h(n) = 31 ( (n) + (n 0 1) + (n 0 2)) であるので、伝達関
数は、h(n) の z 変換として、
1
3
H (z ) = (1 + z 01 + z02 )
第 2 の方法として入出力信号の z 変換の比として求めるには、まず Z [y(n)] =
Y (z )、Z [x(n)] = X (z ) とする。さらに、時間シフト性より Z [x(n 0 1)] =
X (z )z 01 ; Z [x(n 0 2)] = X (z )z 02 だから、
1
(X (z ) + X (z )z 01 + X (z )z 02 )
3
1
(1 + z 01 + z 02 )X (z)
3
Y (z ) =
=
これから、
H (z ) =
Y (z ) 1
= (1 + z 01 + z 02 )
X (z ) 3
両者のアプローチに本質的な差異はない。しかし後述のように再帰型システム
に対しては、後者がより簡潔に伝達関数を与える。
伝達関数の一般形
たたみ込みの式 (6) から、因果性を満たす非再帰型システムは一般に、次のよ
うに与えられる2
y(n) =
0
X
N 1
h(k)x(n 0 k); (N : 正整数)
k =0
3 点平均の場合と同様に、伝達関数を求めると、
Y (z ) =
0
X
N 1
k=0
h(k)z 0k )X (z )
k=0
よって、
H (z ) =
0
X
N 1
h(k)X (z )z 0k = (
Y (z )
=
X (z )
0
X
N 1
h(k)z 0k
k =0
伝達関数の z の係数が直接インパルス応答に対応することに注意してほしい。ま
た、伝達関数は z の多項式であり、この多項式の次数を伝達関数の次数 (order)
という。この伝達関数の次数は N 0 1 次である。
z 変換による応答の計算
伝達関数 H (z) のシステムに信号 X (z ) を入力したときの出力は H (z )X (z ) に
なることを利用して、x(n) に対する出力を計算することができる。
2 k < 0 でインパルスは信号値が 0 なので因果性より応答も 0、つまり k < 0 では h(k) = 0。また非
再帰的であるから FIR となり、ある時刻 N > 0 より先の応答は 0。つまり k > N で h(k ) = 0。
14
例) x(0) = 2; x(1) = 02; x(2) = 2、それ以外で x(n) = 0 なる入力を 2 点平均
システム y(n) = 21 (x(n) + x(n 0 1)) に入力したときの出力を求めると、
このようにして、z 変換を用いて出力を計算することができる。より一般には
逆 z 変換を用いる必要がある。
再帰型システムの伝達関数の導出法
フィードバックを持つ再帰型システムとして、
y (n) = x(n) + by (n 0 1)
を例にする。先の非再帰型システムの場合とほぼ同様に、システムの伝達関数
を求めることができる。まず、両辺を z 変換すると
Y (z ) = X (z) + bY (z )z 01
となる。次に、Y (z ) と X (z ) について整理すると
Y (z )(1 0 bz01 ) = X (z )
を得る。ゆえに、伝達関数 H (z ) は、
H (z ) =
Y (z )
1
=
X (z ) 1 0 bz 01
伝達関数と周波数特性
周波数特性を伝達関数から計算することができる。伝達関数 H (z ) が既知であ
るとき、その z に ei! を代入する。すなわち、
H (ei! ) = H (z )jz=ei!
この方法の正当性は、次のように説明される。まず、入力とする信号を x(n) と
して、それを z 変換 (式 (13)) する。
X (z ) =
1
X
n=
01
x(n)z 0n
定義よりインパルス応答 h(n) の z 変換が伝達関数 H (z ) であるので、この x(n)
に h(n) を代入すれば H (z ) が求まる。
H (z ) =
1
X
n=
01
h(n)z 0n
ここで、この z に ei! を代入すると、
H (ei! ) =
1
X
01
n=
h(n)e0i!n
となり、式 (11) と一致する。すなわち、伝達関数の z に ei! を代入した結果と、
直接にインパルス応答から式 (11) を計算した結果とは一致する。
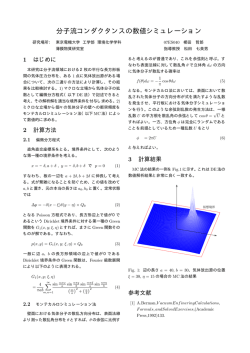
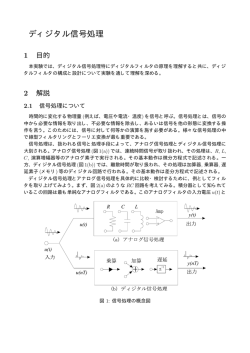
Z 変換による周波数応答についてまとめたものを図 15 に示す。
15
ᤨ㑆㗔ၞ
y(n)=T[x(n)]
zᄌ឵
\㗔ၞ
ࠗࡦࡄ࡞ࠬᔕ╵ h(n)
y(n) = Ǜh(k)x(n-k)
x(n) = exp(iȁn)
વ㆐㑐ᢙ
H(z) = Y[z]/X[z]
ᵄᢙ㗔ၞ
z = exp(iȁ))
ᵄᢙᔕ╵
H(exp(iȁ))
図 15: z 変換と周波数応答
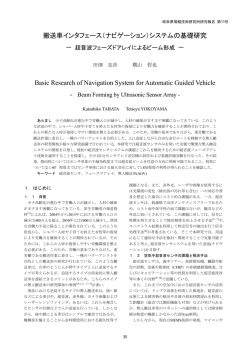
12.5.11 まとめ
デジタルフィルター
簡単な演算によってローパスフィルターなどの信号処理を行うことができる。
周波数解析
デジタルフィルターの周波数特性を求める方法
デジタルフィルターの設計
所望の周波数特性をもつデジタルフィルターを合成すること。
16
図 16: 各種のフィルター(LPF (Low Pass Filter), BPF (Band Pass Filter), HPF
(High Pass Filter), BRF (Band Reject Filter)
17
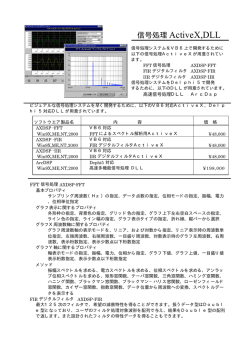
プログラム例
//
//
//
//
//
lpf1k.java
低域濾過フィルター
エンコーディングは次の仕様に固定
サンプリングレート 8kHz、データ長 8 ビット、モノラル、PCM
(C) 鈴木宏正@東京大学 1999/9/13
略
static void convert(String infn, String outfn)
{
FileInputStream fin;
FileOutputStream fout;
//低域通過タイプ
//減衰量: 60.000 [dB]
//次数: 100 次
//標本化周波数: 8.00000 [kHz]
//遮断周波数1: 1.00000 [kHz]
double h[] ={
0.00012980, 0.00012571, 0.00000000,-0.00021187,-0.00037517,
-0.00032645, 0.00000000, 0.00047473, 0.00079661, 0.00066250,
0.00000000,-0.00089617,-0.00146002,-0.00118280, 0.00000000,
0.00153030, 0.00244607, 0.00194765, 0.00000000,-0.00244520,
-0.00385770,-0.00303525, 0.00000000, 0.00373275, 0.00583714,
0.00455654, 0.00000000,-0.00553114,-0.00860537,-0.00668972,
0.00000000, 0.00807882, 0.01255811, 0.00976658, 0.00000000,
-0.01185753,-0.01853088,-0.01452100, 0.00000000, 0.01805053,
0.02870358, 0.02300258, 0.00000000,-0.03057276,-0.05112438,
-0.04387509, 0.00000000, 0.07433807, 0.15850612, 0.22485221,
0.25000417, 0.22485221, 0.15850612, 0.07433807, 0.00000000,
-0.04387509,-0.05112438,-0.03057276, 0.00000000, 0.02300258,
0.02870358, 0.01805053, 0.00000000,-0.01452100,-0.01853088,
-0.01185753, 0.00000000, 0.00976658, 0.01255811, 0.00807882,
0.00000000,-0.00668972,-0.00860537,-0.00553114, 0.00000000,
0.00455654, 0.00583714, 0.00373275, 0.00000000,-0.00303525,
-0.00385770,-0.00244520, 0.00000000, 0.00194765, 0.00244607,
0.00153030, 0.00000000,-0.00118280,-0.00146002,-0.00089617,
0.00000000, 0.00066250, 0.00079661, 0.00047473, 0.00000000,
-0.00032645,-0.00037517,-0.00021187, 0.00000000, 0.00012571,
0.00012980
};
略
{
}
{
}
for (i = 0; i < size; i++)
{
byte temp;
buf[0] = (byte)fin.read();
o = 0.0;
for (m = 0; m<=NF; m++)
o += h[m]*((double)buf[m]);
fout.write((byte)o);
for (m=NF; m>0; m--)
buf[m] = buf[m-1];
}
略
18
© Copyright 2026 Paperzz