修士学位論文
月・惑星探査ローバーのステアリング
特性に基づく走行力学の解析
平成16年度
(平成17年2月1日提出)
東北大学大学院工学研究科
航空宇宙工学専攻
石上 玄也
Locomotion Mechanics
for Planetary Exploration Rovers
Based on Steering Characteristics
Genya Ishigami
Abstract
The use of rovers for planetary exploration significantly increases the flexibilities of a
mission. A planetary rover is therefore expected to travel long distances and perform
complex scientific tasks in order to satisfy our scientific mission goals to understand
the unknowns. In the last decade, a considerable amount of research has been done in
different areas for the development of planetary rovers.
The terrain of a planet such Mars or our moon is mostly covered with loose soil and
consists of unknown land features. The rover is required to travel even on such highly
challenging terrain having to negotiate and avoid boulders, rocks or stones. On loose
soil, the wheels of the rover easily slip and loose their traction, meanwhile on rocky
surface, the rover might become unstable or, in the worst case, tip over. Hence, it is
quite necessary to investigate the dynamic behavior of the rover, taking into account
the interaction between the wheel and the soil. Such interaction between them has been
studied in the area called “Terra-mechanics.” For instance, an analysis of a wheel-soil
traction mechanism and the modeling of the stress distribution underneath the wheel
have been methodically investigated. However, the steering motion of the rover or the
side (lateral) force of the wheel on loose soil has not been well studied.
In this thesis, the locomotion mechanics for the rovers are described based on steering
characteristics. The issue addressed in the research is the steering characteristics of
a rover on loose soil. A traditional way to analyze the steering characteristics of
an on-road vehicle uses an approximate model called “bicycle model.” However, the
bicycle model would not describe desired approximations when a vehicle travels off
road. Particularly when a vehicle dynamically skids on loose soil, the difference becomes
greater. Therefore, the main focus of this research is the development of the rover’s
dynamics simulation model paying attention to the behavior of all wheels.
A key issue in this thesis is the development of a wheel contact model on loose soil.
-i-
Abstract
The contact model for pneumatic tires on a rigid surface have been well studied, though,
the study of the contact model for rigid wheels on loose soil is still an open issue. It
is needed to address the longitudinal and lateral forces of the wheel in order to discuss
the steering characteristics. Particularly the derivation of the lateral force is developed
based on the terra-mechanics approach. In general, the lateral force is produced by the
shear stress of the soil under the wheel, however, on loose soil, the wheels have certain
amount of sinkage and then another force called “bulldozing resistance” is generated
sideward. Paying close attention to that wheel-sink phenomenon, the wheel contact
model is formulated. In order to deal with such wheel-dynamic behavior, there are
two parameters; one is slip ratio and the other is slip angle. The relationships between
those two parameters and the wheel forces are evaluated using numerical simulations.
The validity of the wheel contact model has been verified through a single wheel
experimental test bed. In that test bed, forces and torques produced in a single wheel
are measured when the wheel is forced to travel at an arbitrarily given velocity, given
a rotational velocity and a slip angle. Through the experiments, the propriety of the
proposed model is confirmed.
The motion trajectory of a rover that comes from the all-wheel dynamics model is
compared to an experimental trajectory. Also, the differences between the all-wheel
dynamics model and the bicycle model are clarified based on the motion trajectories.
The Chapter 2 of the thesis introduces the bicycle model as a traditional approach to
analyze the steering characteristics of wheeled vehicles and also indicates the necessity
of the all-wheel dynamics model. In the Chapter 3, the proposed wheel contact model is
referred and particularly the formulation of the lateral force is focused on. Experimental
results are presented in the Chapter 4 along with discussion on the validity of the
proposed model. The Chapter 5 introduces the all-wheel dynamics model of the rover
and discusses the its reliability based on the comparison among the bicycle model,
experimental results and the all-wheel dynamics model.
If the wheel’s dynamics can be modeled properly, such model must be useful to
control the steering motion of a rover to follow a given trajectory. Additionally, the
all-wheel dynamics model, which is composed of the terra-mechanics-based model and
the dynamics model of the rover, will be used to evaluate and compare feasible steering
maneuvers in the motion-planning phase.
- ii -
目次
第1章
序論
1
1.1 本研究の背景 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1.1.1
ローバーの技術課題 . . . . . . . . . . . . . . . . . . . . . . . .
2
1.1.2
テラメカニクスとは . . . . . . . . . . . . . . . . . . . . . . . .
5
1.2 本研究の目的 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
1.3 本論文の構成と概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
第2章
ステアリング特性に基づく走行力学
11
2.1 はじめに . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
2.2 ステアリング特性とは . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
2.3 ステアリング特性と旋回車両の運動方程式 . . . . . . . . . . . . . . . .
13
2.4 テストベッドを用いたステアリング実験 . . . . . . . . . . . . . . . . .
16
2.4.1
実験概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16
2.4.2
実験結果と数値計算結果の比較 . . . . . . . . . . . . . . . . . .
18
2.4.3
従来の解析手法の不整地における問題点 . . . . . . . . . . . . .
23
2.5 本研究におけるステアリング解析アプローチ . . . . . . . . . . . . . .
24
第3章
不整地におけるステアリング特性と車輪力学モデル
27
3.1 はじめに . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
27
. . . . . . . . . . . . . . . . . . .
28
3.3 テラメカニクスに基づく走行力学 . . . . . . . . . . . . . . . . . . . . .
29
3.3.1
すべり率・スリップ角 . . . . . . . . . . . . . . . . . . . . . . .
31
3.3.2
車輪の沈下 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31
3.3.3
車輪の入射角・離脱角 . . . . . . . . . . . . . . . . . . . . . . .
34
3.3.4
車輪垂直応力モデルの検討
. . . . . . . . . . . . . . . . . . . .
36
3.3.5
車輪せん断応力モデル . . . . . . . . . . . . . . . . . . . . . . .
39
3.3.6
駆動力・垂直抗力・回転抵抗 . . . . . . . . . . . . . . . . . . .
41
3.4 サイドフォースの定式化 . . . . . . . . . . . . . . . . . . . . . . . . . .
42
3.2 ステアリング時に車輪に作用する力
- iii -
目次
3.4.1
Fu : 車輪下部のせん断応力によって発生する力 . . . . . . . . .
43
3.4.2
Fs : 沈下した車輪の側面部分において発生する力 . . . . . . . .
43
3.4.3
Hegedusの排土抵抗推定方法を用いたFs の導出
. . . . . . . . .
46
3.4.4
修正された駆動力,サイドフォース
. . . . . . . . . . . . . . .
48
3.5 数値シミュレーション . . . . . . . . . . . . . . . . . . . . . . . . . . .
48
3.5.1
計算プロセス . . . . . . . . . . . . . . . . . . . . . . . . . . . .
48
3.5.2
垂直応力分布の比較検討 . . . . . . . . . . . . . . . . . . . . . .
51
3.5.3
すべり率・スリップ角 ー 駆動力曲線 . . . . . . . . . . . . . . .
57
3.5.4
すべり率・スリップ角 ー サイドフォース曲線 . . . . . . . . . .
57
3.5.5
駆動力曲線 ー サイドフォース曲線 . . . . . . . . . . . . . . . .
58
第4 章
月模擬砂を用いた車輪走行実験
61
4.1 はじめに . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
61
4.2 車輪走行実験装置概要 . . . . . . . . . . . . . . . . . . . . . . . . . . .
61
4.2.1
システム構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
62
4.2.2
実験車輪 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
62
4.2.3
実験土壌:月土壌レゴリスシミュラント . . . . . . . . . . . . .
65
4.3 Hegedusの排土抵抗推定法の実証実験 . . . . . . . . . . . . . . . . . . .
67
4.3.1
実験手順 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
67
4.3.2
実験結果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
68
4.3.3
過渡状態および定常状態における速度依存性 . . . . . . . . . .
70
4.4 車輪走行実験 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
74
4.4.1
実験概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
74
4.4.2
駆動力計測実験結果 . . . . . . . . . . . . . . . . . . . . . . . .
75
4.4.3
サイドフォース計測実験結果 . . . . . . . . . . . . . . . . . . .
76
4.4.4
駆動力 ー サイドフォース . . . . . . . . . . . . . . . . . . . . .
79
4.4.5
セルフアライニングトルク計測実験と力学モデル . . . . . . . .
82
4.4.6
車輪安定性に関する考察 . . . . . . . . . . . . . . . . . . . . . .
87
4.5 車輪形状に関する検討 . . . . . . . . . . . . . . . . . . . . . . . . . . .
89
4.5.1
駆動力:Fx . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
90
4.5.2
サイドフォース:Fy . . . . . . . . . . . . . . . . . . . . . . . .
91
4.5.3
セルフアライニングトルク:τz . . . . . . . . . . . . . . . . . .
91
4.5.4
車輪形状に関するまとめ . . . . . . . . . . . . . . . . . . . . . .
93
- iv -
目 次
第5章
車輪力学モデルを用いた動力学シミュレーション
97
5.1 はじめに . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
97
5.2 ローバーのモデル化 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
98
5.2.1
キネマティクスモデル . . . . . . . . . . . . . . . . . . . . . . .
98
5.2.2
ダイナミクスモデル . . . . . . . . . . . . . . . . . . . . . . . .
99
5.2.3
ローバーの力学パラメータ
. . . . . . . . . . . . . . . . . . . . 101
5.3 車輪力学モデルと動力学モデルの統合化 . . . . . . . . . . . . . . . . . 101
5.3.1
動力学計算における車輪のすべり率・スリップ角の導出 . . . . 102
5.4 シミュレーション概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
5.5 シミュレーション結果 . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
5.5.1
ステアリング角度による挙動の比較
5.5.2
動力学シミュレーションにおけるステアリング特性の考察 . . . 109
5.5.3
重力環境の比較 . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
5.5.4
重力環境のステアリング特性への影響 . . . . . . . . . . . . . . 113
. . . . . . . . . . . . . . . 105
5.6 ステアリング走行実験との比較 . . . . . . . . . . . . . . . . . . . . . . 113
5.6.1
走行軌跡の比較 . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
5.6.2
サイドフォースに関する比較 . . . . . . . . . . . . . . . . . . . 117
5.7 まとめと今後の課題 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
第6章
結論
121
謝辞
125
参考文献
126
付録
129
付録A
ローバーテストベッドの詳細
131
A.1 はじめに . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
A.2 ローバーテストベッド概要 . . . . . . . . . . . . . . . . . . . . . . . . . 131
A.2.1 展開メカニズム . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
A.2.2 サスペンションメカニズム . . . . . . . . . . . . . . . . . . . . . 133
A.2.3 システム概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
-v-
表目次
2.1 Specifications of the rover experimental facility . . . . . . . . . . . . . .
17
2.2 Calculation results based on bicycle model . . . . . . . . . . . . . . . .
21
2.3 Comparison of side force based on bicycle model . . . . . . . . . . . . .
22
3.1 Parameters for the numerical simulation . . . . . . . . . . . . . . . . .
50
4.1 Specification of the single wheel test bed . . . . . . . . . . . . . . . . .
62
4.2 Specification of Motor controller and Motor Driver . . . . . . . . . . .
64
4.3 Specification of F/t sensor . . . . . . . . . . . . . . . . . . . . . . . . .
65
4.4 Specification of convey motor and wheel motor . . . . . . . . . . . . . .
65
4.5 Comparison about mechanical properties of the Lunar soil . . . . . . .
66
4.6 Result of 2nd-order polynomial approximation . . . . . . . . . . . . . .
68
4.7 Parameters on 1st-order delay system of Bulldozing force . . . . . . . .
71
5.1 Definition of each joint angle . . . . . . . . . . . . . . . . . . . . . . . .
98
5.2 Mass and inertia of the rover . . . . . . . . . . . . . . . . . . . . . . . . 102
5.3 Comparison of side force . . . . . . . . . . . . . . . . . . . . . . . . . . 117
A.1 Size of the rover . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
A.2 System specification of the rover test bed . . . . . . . . . . . . . . . . . 137
- vii -
図目次
1.1 Lunokhod . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
c
1.2 Sojourner NASA/JPL
. . . . . . . . . . . . . . . . . . . . . . . . . .
3
c
1.3 Mars Exploration Rover NASA/JPL
. . . . . . . . . . . . . . . . . .
3
2.1 Steering characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
2.2 Steering process of 4-wheeled vehicle . . . . . . . . . . . . . . . . . . .
13
2.3 Bicycle model of a steering vehicle . . . . . . . . . . . . . . . . . . . . .
14
2.4 Steady circle turning and steering characteristics . . . . . . . . . . . . .
15
2.5 Rover test bed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17
2.6 Overview of the rover experimental facility . . . . . . . . . . . . . . . .
18
2.7 Rover steering expeiments at JAXA . . . . . . . . . . . . . . . . . . . .
19
2.8 Schematic view of the experimental system . . . . . . . . . . . . . . . .
20
2.9 Calculation flow for bicycle model . . . . . . . . . . . . . . . . . . . . .
21
2.10 Results of steering expeiments . . . . . . . . . . . . . . . . . . . . . . .
22
2.11 Steering model on off-load . . . . . . . . . . . . . . . . . . . . . . . . .
24
2.12 Comparison between Bicycle model and All-wheel dynamics model . . .
25
3.1 Geometric relationship for cornering force
. . . . . . . . . . . . . . . .
28
3.2 Self-aligning torque . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
29
3.3 Wheel coordinate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
30
3.4 Pressure - sinkage experiment . . . . . . . . . . . . . . . . . . . . . . .
32
3.5 Static sinkage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
32
3.6 Dynamic sinkage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
34
3.7 Entry angle and exit angle model . . . . . . . . . . . . . . . . . . . . .
35
3.8 Distribution of the normal stress under a rigid wheel on loose soil . . .
36
3.9 Distribution of the shear stress under a rigid wheel on loose soil . . . .
39
3.10 Shear stress - displacement curve . . . . . . . . . . . . . . . . . . . . .
40
3.11 Slip velocity on a circumference of a wheel . . . . . . . . . . . . . . . .
41
- ix -
図目次
3.12 Drawbar pull and vertical force derived from the normal and the shear
stresses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
42
3.13 Modeling of wheel side force . . . . . . . . . . . . . . . . . . . . . . . .
43
3.14 Bulldozing resistance estimation based on Bekker’s theory . . . . . . .
44
3.15 Bulldozing resistance estimation based on Hegedus’s theory . . . . . . .
45
3.16 Ground swell sideward the wheel . . . . . . . . . . . . . . . . . . . . .
46
3.17 Bulldozing resistance generated at the sideward of the wheel . . . . . .
47
3.18 Revised drawbar pull and side force . . . . . . . . . . . . . . . . . . . .
48
3.19 Calculation flow for the numerical simulation . . . . . . . . . . . . . . .
49
3.20 Comparison of normal stress models (wheel angle θ - normal stress σ) .
53
3.21 Comparison of normal stress models (slip ratio s - vertical force Fz ) . .
54
3.22 Comparison of normal stress models (slip ratio s - drawbar pull Fx ,
drawbar pull coefficient Fx /Fz ) . . . . . . . . . . . . . . . . . . . . . .
55
3.23 Comparison of normal stress models (slip ratio s - side forceFy ,side
force coefficientFy /Fz ) . . . . . . . . . . . . . . . . . . . . . . . . . . .
56
3.24 Slip ratio s · slip angle β - drawbar pull Fx . . . . . . . . . . . . . . . .
57
3.25 Slip ratio s · slip angle β - side force Fy . . . . . . . . . . . . . . . . . .
58
3.26 Drawbar pull Fx - Side force Fy . . . . . . . . . . . . . . . . . . . . . .
59
4.1 Single wheel test bed . . . . . . . . . . . . . . . . . . . . . . . . . . . .
63
4.2 System diagram of the single wheel test bed . . . . . . . . . . . . . . .
64
4.3 Experimantal wheels . . . . . . . . . . . . . . . . . . . . . . . . . . . .
66
c
4.4 Regolith of the moon NASA
. . . . . . . . . . . . . . . . . . . . . . .
66
4.5 Test bed for Hegedus’s Bulldozing resistance estimation . . . . . . . . .
67
4.6 Results of Hegedus’s Bulldozing resistance estimation (1) . . . . . . . .
69
4.7 Results of Hegedus’s Bulldozing resistance estimation (2) . . . . . . . .
70
4.8 Approximation of Bulldozing force by 1st-order delay system . . . . . .
72
4.9 Relationship between slip ratio and decay time-constant
. . . . . . . .
73
4.10 Relationship between slip ratio and bulldozing distance . . . . . . . . .
73
4.11 Experimental results:slip ratio - Fx :Drawbar Pull . . . . . . . . . . .
77
4.12 Experimental results:slip ratio - Fx /Fz :Drawbar Pull coefficient . . .
78
4.13 Experimental results:slip ratio - Fy :Side force . . . . . . . . . . . . .
80
4.14 Experimental results:slip ratio - Fy /Fz :Side force coefficient . . . . .
81
4.15 Experimental results:Fx :Drawbar Pull - Fy :Side force . . . . . . . .
82
-x-
図目 次
4.16 Experimental results:Fx /Fz :Drawbar Pull coefficient - Fy /Fz :Side
force coefficient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
83
4.17 Experimental results:slip ratio - τz :Self-aligning torque . . . . . . . .
84
4.18 Self-aligning torque of rigid wheel on loose soil . . . . . . . . . . . . . .
85
4.19 Estimation of originating point of wheel forces . . . . . . . . . . . . . .
86
4.20 Numerical simulation vs. Experimental results of Self-aligning torque .
87
4.21 Relationship between self-aligning torque and caster angle (1) . . . . .
88
4.22 Relationship between self-aligning torque and castor angle (2) . . . . .
89
4.23 Comparison of wheel shape:Drawbar pull (steady state) . . . . . . . .
92
4.24 Comparison of wheel shape:Drawbar pull (transient state) . . . . . . .
92
4.25 Snapshot of sinking wheel (slip ratio = 0.9)
. . . . . . . . . . . . . . .
93
4.26 Comparison of wheel shape:Side force . . . . . . . . . . . . . . . . . .
94
4.27 Comparison of wheel shape:Self-aligning torque
. . . . . . . . . . . .
95
4.28 Snapshot from backward wheel . . . . . . . . . . . . . . . . . . . . . .
96
4.29 Striped pattern of the soil formed by shear stress . . . . . . . . . . . .
96
5.1 Kinematics model of the rover . . . . . . . . . . . . . . . . . . . . . . .
99
5.2 Dynamics model of the rover . . . . . . . . . . . . . . . . . . . . . . . . 100
5.3 Coordinate system of the rover model . . . . . . . . . . . . . . . . . . . 101
5.4 Calcualtion flow of dynamics simulation . . . . . . . . . . . . . . . . . 103
5.5 Derivation of slip ratio and slip angle of each wheel (1) . . . . . . . . . 106
5.6 Derivation of slip ratio and slip angle of each wheel (2) . . . . . . . . . 106
5.7 Simulation results:steering angle = 15[deg] . . . . . . . . . . . . . . . 107
5.8 Simulation results:steering angle = 30[deg] . . . . . . . . . . . . . . . 108
5.9 Consideration of steering characteristics based on steering angle effect . 109
5.10 Comparison of the rover trajectories . . . . . . . . . . . . . . . . . . . . 110
5.11 Computer graphics of the rover simulations . . . . . . . . . . . . . . . . 111
5.12 Simulation results:steering angle = 15[deg] (Gravity of the moon) . . 112
5.13 Consideration of steering characteristics based on gravity effect . . . . . 113
5.14 Comparison of the rover trajectories based on gravity effect . . . . . . . 114
5.15 Computer graphics of the rover simulations based on gravity difference
115
5.16 Comparison of simulated trajectories . . . . . . . . . . . . . . . . . . . 116
5.17 Comparison of the rover motion by the use of the computer graphics . . 118
A.1 Snapshot of the rover . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
A.2 Strat mechanism . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
- xi -
図目次
A.3 Expansion sequence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
A.4 Mechanism of boggy suspension . . . . . . . . . . . . . . . . . . . . . . 135
A.5 Explaination of boggy suspension . . . . . . . . . . . . . . . . . . . . . 135
A.6 System diagram of rover test bed . . . . . . . . . . . . . . . . . . . . . 137
- xii -
第 1章
序論
1.1
本研究の背景
月や惑星の探査は,地球を含めた太陽系の起源および進化の過程を解明するうえで非
常に科学的意義の高いミッションである.惑星の大気成分や地質構造あるいは構成物質
を調査し他の惑星天体と比較することは,太陽系の進化を解き明かす可能性を示唆する
ものである.また惑星の内部構造や構成物質を調査することにより,将来の月面天文台
や月面基地などの建設,あるいは惑星資源の利用といった開発利用ミッションに関する
貴重なデータを得ることが可能となる.
このような探査ミッションは主に3つの段階に分けて考えることができる[1].まず 1)
天体周回衛星からのリモートセンシングによって天体全体の大気状態や地形高度データ
(例:10 [m]程度の分解能)などのグローバルな情報を把握する「周回観測」,次に 2) 探
査天体の表面に探査機(無人ロボット等)を送り込み,あらかじめ選定された多くの地点
を移動探査し,観測機器の設置,詳細な地質調査やサンプルの収集などをおこなう「着
陸・移動探査」,そして 3) 無人ロボットによって天体で収集されたサンプルを地球へ持
ち帰り,微量元素や年代測定などの精密な分析をおこなう「サンプルリターン」に大別
される.ここで, 2) および 3) において活躍する探査ロボットは「ローバー」と呼ば
れ,惑星探査ミッションを実現するうえで非常に重要なテクノロジーのひとつであると
言われている.
これまでローバーを用いておこなわれた月・惑星探査計画の代表的なものを以下に列
挙する[2].
• ルナ計画(Lunokhod)
1959 年から1976 年にわたって旧ソ連によって実施された無人月面探査計画であ
-1-
第1 章
序論
り,月の岩石や土壌を再び地球へ持ち帰る「サンプルリターン」をおこなった.
また本計画ルナ17号と21号において,2機の無人探査ローバーLunokhod (図1.1)
が1970年,73年に1機ずつ月面に送り込まれている.Lunokhod は全長170 [cm],
全幅160 [cm],全高135 [cm],重量840 [kg]で,独立した8つの車輪によって移動
し,走行距離にして37 [km]にも渡る広い範囲を探査した.
• Mars Path Finder (Sojourner)
NASAの火星探査ミッション・Mars Path Finder において,Sojourner (図1.2) と
名付けられた小型火星探査車が1997年に火星表面に軟着陸を果たし,地表岩石の
分析や大気観測に関する貴重なデータを送信した.Sojournerローバーは探査範囲
が着陸船の周囲半径10 [m],総走行距離が52 [m]ときわめて小さかったが火星表面
の画像等の多くのデータをもたらした.
• Mars Exploration Rover (Spirit,Opportunity)
NASAによっておこなわれている火星探査計画において,Spirit,Opportunity(図
1.3)と呼ばれる2 台のローバーが火星に送り込まれた.2004年1月4日にSpirit が火
星表面に軟着陸を果たし,またOpportunityも同月25日に軟着陸をした.これら2
台のローバーはこれまでで最も鮮明な火星表面の写真を送信することに成功し,
搭載したロボットアームを用いて火星表面の地質などの精密な調査を2005年現在
もおこなっている.特にOpportunityは火星に水が存在した証拠を発見するなど極
めて有益な情報を提供している[3][4].
以上のように月・惑星探査において,ローバーの活躍によって得られる科学的な成果
は非常に大きい.着陸機による探査では点の探査情報しか得られないが,ローバーが天
体表面を移動探査することにより面探査が可能であることが示されている.このような
月・惑星探査によって得られる多くの科学的・技術的知見は我々の知的探究心をますま
す掻き立て,さまざまな月・惑星探査ミッションの遂行が検討されている.また日本で
も移動ロボットを用いた月面探査の可能性が積極的に議論されており,国際的協調の中
で日本の果たす役割が期待されている[5].
1.1.1
ローバーの技術課題
惑星探査ミッションにおけるローバーの技術課題は,ロケットによる打上げ時や天体
軟着陸時における耐衝撃性から,移動探査をおこなうための走行性能,あるいは惑星環境
への適応性など多岐にわたる.以下にローバーの代表的な技術課題をいくつか示す[1][6].
• 走行性能(移動能力,登坂能力,不整地踏破性能)
惑星表面を移動探査するうえで最も重要な課題の1つであり,ミッションによって
-2-
1.1 本研究の背景
図 1.1: Lunokhod
c
図 1.2: Sojourner NASA/JPL
c
図 1.3: Mars Exploration Rover NASA/JPL
-3-
第1 章
序論
は月クレータの内部や山岳地帯における走行が求められる.また月面上は粒子の
細かな砂によって覆われた地形が多いが,その一方,火星のように大小様々な岩
が散在する地形など,様々な不整地に特化した移動システムを開発しなければな
らない.探査ロボット・ローバーの移動方式は,機構のシンプルさ,エネルギ効
率の点から車輪型が最も一般的である.
• 航法誘導制御(遠隔操縦,自律性,経路計画)
ローバーを目的地域に導くためのナビゲーションは,1) 地球からの遠隔操作によっ
てローバーを制御する方式と,2) ローバーに搭載されたセンサ情報によってロー
バーが障害物回避をおこないながら地球からの遠隔操縦によって制御される半自律
方式,さらに 3) ローバーが目的地までセンサ情報をもとに完全自律によって経路
計画(Path Planning)をおこないながらナビゲーションをする自律制御方式がある.
これらの制御方式はローバーと地球間の通信時間遅れと密な関係がある.月探査の
場合は約3秒程度の通信遅れ補償方式を併用することによって遠隔操作が可能とな
る.しかしながら火星探査の場合は通信遅れは8分から40分あるため,半自律もし
くは完全自律によってローバーを制御しなければ十分な移動距離は期待できない.
• 環境適応技術(熱制御,防塵・放射線対策)
太陽からの放射線,昼夜の厳しい温度差や大気中に存在する塵など,過酷な宇宙
環境において一定期間の活動に耐えうるローバーを開発しなければならない.昼
夜の温度差が300度(+120 ∼ −170度)となる月面環境では,ローバー搭載機器の熱
制御設計は必須課題であり,また耐放射線性能を備えた電子機器の開発などが重
要となる.
• サンプル採集,研磨,掘削
移動探査によって資源探査や地質調査あるいは生命探査をおこなううえで,天体
表面の岩石や砂をサンプルとして収集するためのシステム(ロボットアームなど)
をローバーは搭載していなければならない.また惑星表面が露出している岩石な
どの表層は放射線によって被曝していると言われている.よってサンプルの微量
元素や年代測定などの精密な分析をおこなう場合,サンプルの表面を研磨し被爆
の少ない個所からサンプル収集をおこなう必要がある.さらに地層を深く掘るこ
とによって風化していないサンプルを採集することが可能となるため,掘削シス
テムを搭載したローバーの開発もされている.
これらローバ−の技術的な課題に関して特に走行性能に注目すると,月や惑星の表面
は岩石や細かい砂などによって覆われており,ローバーを用いた移動探査をおこなう場
合,車輪が空転して砂に埋まり走行不能(スタック)状態になってしまうことが懸念され
-4-
1.1 本研究の背景
る.また岩石などの障害物を乗り越える際に,ローバーの姿勢が不安定となり転倒して
しまうといった問題も考えられる.これらの事態は探査ミッションそのものの失敗に直
結してしまうため極力避けなければならない.
実際に先に述べたMars Exploration Rover(Opportunity)が火星表面のクレータから
出る際に,その土壌が砂に覆われた不整地であったため幾度となく車輪空転を生じ,登
坂経路を変更しなければならなかったことが報告されている.これは登坂経路計画にお
いて,土壌の性質を十分に考慮していなかったことを意味するとともに,ローバーの
走行性能と経路計画が密接な関係にあるということを示唆するものである.すなわち,
与えられた目標経路にローバーが追従するような制御(軌道追従制御)をおこなう場合,
ローバーの走行性能を加味する必要がある.特に軟弱な地盤上を走行することを想定す
ると,車輪がスリップしたり横滑りを生じたりすることが考えられ,車輪の走行状態
(滑りの程度,スタックの有無など)に対しても配慮しなければならない.
このようにローバーの走行性能や軌道追従性を議論するうえで,その足元部分である
車輪と土壌の相互関係に注目した力学的な解析が必要となる.このような力学解析のこ
とをテラメカニクス(Terramechanics)という.
1.1.2
テラメカニクスとは
テラメカニクス(Terramechanics)は,地表を走行する車両や土の掘削をするといった
土壌を扱う機械と地表の関係における力学である.農業機械や建設機械,オフロード車
両の走行性能は,土の硬さや性質など多くの条件によって著しい影響を受ける.このよ
うないわいるオフロード,不整地面における機械性能と土壌との力学的な相互関係の研
究をテラメカニクスという.
本分野が体系的に開始されたのは1960年頃であり,特に車輪と土壌の相互関係につい
ては,M.G.Bekkerが “ Off-the-Road Locomotion[7] ” に見られるように車輪の走行力
学に関する研究を俯瞰的におこなった.J.Y.Wong[8]も,土壌との関係を考慮した車輪
のトラクションモデルの構築をおこなった.また近年の計算機性能の飛躍的な向上に
伴って,有限要素法や境界要素法を用いた解析もおこなわれている.
月・惑星探査の研究分野においてもテラメカニクスに基づくアプローチにより,ロー
バーの力学解析をおこなっている研究報告もいくつかあるが[9][10],未だ発展途上の段
階であると言われている.
-5-
第1 章
1.2
序論
本研究の目的
月や惑星の探査において天体表面を自律走行するローバーは科学的な探査を成し遂げ
るための技術として期待されており,このような移動探査をおこなううえで「より早く,
より安全な走行移動を実現する制御」が非常に重要な技術課題として考えられる.月表
面のように細かな砂で覆われた地形を走破する場合,車輪が砂地において空転したりス
タックしてしまい移動が不可能になってしまうことは探査ミッションそのものの失敗を
意味する.また障害物や岩石などを乗り越える際にローバーが転倒してしまうことも懸
念される.
ゆえに,ローバーの挙動を評価し議論するためには足元部分である車輪と土壌の相互
関係を考慮した力学解析が必要となる.前述のテラメカニクスの研究分野においては,
現在までに車輪に発生する力や垂直応力分布について多くの研究報告がなされており,
主に車輪のトラクション,すなわちけん引力に関する研究が非常に盛んにおこなわれて
いる.しかしながら車輪の横方向の力・サイドフォースについて示したものは少ない.
サイドフォースが発生する場合,車輪移動体はステアリングをおこなっている.ステア
リングの際,軟弱地盤上では車輪は横滑り(ドリフト状態)になりやすく不安定な状態と
なってしまう.また先に述べたようにローバーが目標経路に追従する場合においても,
車輪が横滑りを生じてしまうと軌道追従が困難となる.以上のような背景から,サイド
フォースの解析ならびにステアリング特性の解析が非常に重要となる.
そこで本研究では,月・惑星探査ローバーのステアリング特性に基づく走行力学解析
をおこなうことを目的とする.これまでの研究では車輪の縦方向(進行方向)に関する力
学解析を重点的におこなってきた.しかしながら先に述べたように車輪の横方向に発生
する力,すなわちサイドフォースに関しては発展途上であり,確立した力学解析がおこ
なわれていない.一般にサイドフォースは車輪下部の横方向せん断応力によってのみ生
じるとされているが,月面のように粉塵状の土壌では車輪が土壌に沈み込むため車輪の
側面部分にも力が加わる.よって本研究では「車輪が沈む」という現象に着目した新し
い車輪力学モデルの提案をおこない車輪に加わる力学関係を系統的にまとめ,ステアリ
ング特性の解析に応用する.
また,月の土壌特性を忠実に再現した砂である「月レゴリスシミュラント」を実験土
壌として用い,車輪の走行実験をおこない車輪に発生する諸力を計測する.加えて,そ
の実験結果を数値シミュレーション結果とを比較・検討することにより,本研究におい
て提案する車輪モデルの整合性を確認する.
さらに本研究ではローバーの車輪に加わる力を明らかにしたうえで,ステアリング時
におけるローバー全体の挙動に関する解析をおこなう.車輪モデルをもとに導出される
力学関係を用いてローバーの動力学モデルを構築し,新しい挙動解析手法として「全輪
-6-
1.3 本論文の構成と概要
動力学モデル」を提案する.この解析モデルを用い,ローバーのステアリング時のシ
ミュレーションを示すとともに,走行実験との比較をおこなうことによって,全輪動力
学モデルの妥当性を検討する.このローバーの挙動解析を応用することによって,先に
述べた経路計画 (軌道追従制御) への援用が可能となる.
本研究で明らかにされる技術および理論は,地球上における火山などの極限地探査ある
いはや戦災復興地における地雷探査ロボットなどへの応用が十分可能であり,本研究は他
の学術領域に対しても大きな波及効果を期待でき,革新性の高い研究になりうると考える.
1.3
本論文の構成と概要
本論文は,以下に示すように6つの章より構成される.
第 1 章 序論
本研究の背景目的について述べる.
第 2 章 ステアリング特性に基づく走行力学
車輪移動体のステアリング特性について明らかにし,ステアリング時の挙動解析
方法として「Bicycleモデル」と呼ばれる従来のアプローチを示す.また従来の解
析手法の問題点について,テストベッドを用いたステアリング実験の結果をふま
えて考察し,本研究のアプローチを明確にする.
第 3 章 不整地におけるステアリング特性と車輪力学モデル
テラメカニクスに基づいた車輪力学モデルを提案する.車輪の走行状態を表現す
る重要なパラメータであるすべり率とスリップ角を示し,車輪の応力モデルをも
とに導出される車輪の力学関係について明らかにする.特にサイドフォースの定
式化について詳しく述べる.さらに数値シミュレーションによってパラメータと
力の依存関係を導く.
第 4 章 月模擬砂を用いた車輪走行実験
月土壌模擬砂「月レゴリスシミュラント」を用いた走行実験について示す.本研
究において提案する車輪力学モデルの整合性を車輪走行実験によって確認し考察
をおこなう.
第 5 章 車輪力学モデルを用いた動力学シミュレーション
車輪力学モデルをもとに導出される力学関係を用いてローバーの動力学モデルを
構築し,新しい挙動解析手法として「全輪動力学モデル」を提案する.ローバー
のステアリング時のシミュレーションを示すとともに,重力環境の違いが及ぼす
-7-
第1 章
序論
ステアリング特性への影響についても言及する.さらに,第2章において示すステ
アリング実験の走行軌跡との比較,Bicycleモデルとの比較をおこない,全輪動力
学モデルの妥当性について検討する.
第 6 章 結論
本研究の結論を述べる.
-8-
1.3 本論文の構成と概要
主な記号
a0 , a1
最大応力発生角定数
b
[m]
車輪幅
c
c0
c1
CF
Cf , Cr
[kPa]
土壌粘着力
動的沈下定数
沈下時定数
[N]
[N/rad]
ローバー本体に加わる遠心力 (Centrifugal Force)
d
D1 , D2
[m]
トレッドベース
FC
Fs
Fu
Fx
Fy
Fz
[N]
[N]
[N]
[N]
[N]
[N]
車輪のコーナリングフォース (Cornering force)
g
[m/s2 ]
重力加速度
h
hd
hs
hall
[m]
[m]
[m]
[m]
車輪の沈下量
jx , jy
[m]
車輪x , y方向の土壌変形量
kc
kx , ky
kφ
Ks
[N/mn+1 ]
[m]
[N/mn+2 ]
[rad · s2 / m2 ]
cに依存する土壌変形定数
車輪x , y方向の土壌変形定数
φに依存する土壌変形定数
スタビリティファクタ
Lf , Lr
[m]
前後ホイールベース
M
[Nm]
ローバー本体の自転モーメント
車輪前後輪のコーナリングパワー
排土抵抗定数
車輪側面部に発生する力
車輪下部に発生するy方向の力
車輪の駆動力 (Drawbar pull)
車輪のサイドフォース (Side force)
車輪の垂直抗力 (Vertical force)
車輪の動的沈下量
車輪の静的沈下量
車輪の総沈下量
n
p
[Pa]
土壌圧力
r
Rb
[m]
[N/m]
車輪半径
土壌の性質に依存する指数定数
s
t
T
排土抵抗(Bulldozing resistance)
滑り率
[s]
[Nm]
時間
車輪回転抵抗
-9-
第1 章
序論
tc , te , tp
tr
[m]
[m]
空気タイヤ(ゴムタイヤ)のトレール距離
u
[m/s]
車体の回転によって車輪重心に生じる速度
v
vb
vx
vy
vjx , vjy
[m/s]
[m/s]
[m/s]
[m/s]
[m/s]
車輪移動速度
x,y方向の車輪すべり速度
W
[N]
垂直荷重 (車輪に対する負荷:Vertical load)
Xc
[rad]
土壌表面と土壌破壊面のなす角度
α
[rad]
接近角
β
[rad]
スリップ角
δf , δr
[rad]
前後車輪のステアリング角
[rad]
車体重心と車輪重心のなす角
φ
[rad]
土壌の内部摩擦角
γ
[rad]
車輪取り付け角 (キャスタ角)
κ
剛性車輪のトレール距離
ローバー本体の移動速度
車輪並進(縦方向)速度
車輪横速度
離脱角定数
λ
[rad]
速度ベクトルuと車輪座標系x軸がなす角
θf
θm
θr
θs
[rad]
[rad]
[rad]
[rad]
車輪入射角
ρd
ρ
[kg/m3 ]
[m]
土壌密度
σ
σf
σm
σr
[Pa]
[Pa]
[Pa]
[Pa]
車輪に生じる垂直応力
τx , τy
τz
[Pa]
[Nm]
車輪x , y方向に生じるせん断応力
ω
[rad/s]
車輪回転速度
ψ
[rad]
ローバー本体のヨー角度
最大応力発生角
車輪離脱角
静的沈下時の車輪と土壌の接触角
定常旋回半径
車輪前方領域における垂直応力
車輪に生じる最大垂直応力
車輪後方領域における垂直応力
車輪のセルフアライニングトルク
- 10 -
第 2章
ステアリング特性に基づく走行力学
2.1
はじめに
ステアリング特性の解析は自動車工学の分野において非常に盛んに研究されており,
自動車の創世期から現在に至るまでの著しい自動車の普及率は,ステアリングの容易さ
が大きな要因の一つと言われている.
本章ではまずはじめに車輪移動体のステアリング特性について概括的に述べ,ステア
リング特性を決定づける要因について明らかにする.次にステアリングのプロセス「な
ぜ曲がるのか」ということについて示し,ステアリング時の挙動解析に対して自動車工
学で用いられている「Bicycleモデル」と呼ばれるアプローチを述べる.さらに従来の解
析手法の問題点について,テストベッドを用いたステアリング実験の結果をふまえて考
察し,本研究におけるステアリング特性の解析アプローチを明確にする.
2.2
ステアリング特性とは
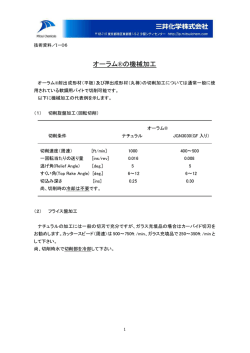
車輪移動体のステアリング特性は,図2.1に示すように車体の遠心力CF と車輪のコー
ナリングフォースの合力FC のバランスによって以下の3つに分類される.
Neutral-steer(ニュートラルステア)
遠心力とコーナリングフォースがつりあった状態で旋回をおこなっている状態の
ことであり,理想的な状態である.
Under-steer(アンダステア)
コーナリングフォースよりも遠心力の方が大きい場合で,ニュートラルステア状
態よりも外側に膨らむように旋回する状態のことである.
- 11 -
第2 章
ステアリング特性に基づく走行力学
Under-steer
Neutral-steer
CF
Over-steer
Fc
図 2.1: Steering characteristics
Over-steer(オーバステア)
コーナリングフォースよりも遠心力の方が小さい場合であり,ニュートラルステ
ア状態よりも内側に回りこむように旋回する状態のことである.
これらのステアリング特性は,車体に加わる力学的な関係と車体の特性から決定され
るものであり,この特性の指針となるパラメータのことを「スタビリティファクタ」と
いう.スタビリティファクタ Ks は式(2.1)によって定義され,車体の前後車輪のホイー
ルベース Lf ,Lr ,および車体質量 W/g = m,コーナリングパワー Cf ,Cr からなる.
W (Lf /Cr − Lr /Cf )
·
g
2L2
(Lf Cf − Lr Cr )
= −m ·
2L2 Cf Cr
Ks = −
(2.1)
ここでコーナリングパワーとはスリップ角 β の増大に対するコーナリングフォース FC
の増大率のことであり,以下の式で表すことが出来る.
C=
∆FC
∆β
(2.2)
コーナリングフォースとスリップ角の関係は一次線形近似が可能であると言われており,
このコーナリングパワーは車体速度,荷重などから一意に求めることができる.
先に述べたステアリング特性はスタビリティファクタをもとに以下のように決定される.
Ks = 0 → Neutral-steer(ニュートラルステア)
Ks > 0 → Under-steer(アンダステア)
Ks < 0 → Over-steer(オーバステア)
- 12 -
2.3 ステアリング特性と旋回車両の運動方程式
δ
δ
β'f
βf
vf
vf
Fcf
Lf
F'cf
Lf
M1
δ − βf
L
vr
Lr
CF
L
O'
vr
Lr
ρ
δ − β'f + βr
V
M2
βr
ρ
O
Fcr
(a)
O
(b)
図 2.2: Steering process of 4-wheeled vehicle
次にスタビリティファクタとステアリング特性の力学的な関係について力学的な解析を
おこなう.
2.3
ステアリング特性と旋回車両の運動方程式
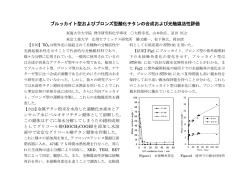
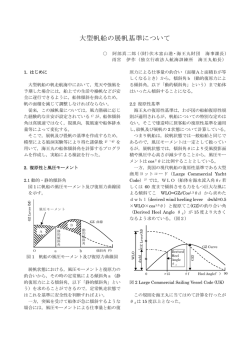
4輪の車両が前輪のステアリングおこなう場合について,
「Bicycleモデル(2輪モデル)」
と呼ばれる解析アプローチを用いて考える.このモデルでは,一般に左右の車輪のス
リップ角は同等とみなすこととし,4輪のモデルと2輪のモデルが線形等価であるとして
旋回のプロセスを以下のように定義するものである[11].ここでスリップ角とは車輪の
移動に対して車輪が横滑りをする角度のことであり(第3章参照),ステアリング時に発生
する力を導出するうえで重要なパラメータである.
1. 操舵角 δ によって旋回をおこなう.
2. 車輪y方向に速度 vy が生じる
3. 前輪にスリップ角 βf = tan−1 (vy /vx ) が生じ,コーナリングフォース FCf が発生
する.
4. FCf によって車体重心周りに自転モーメント M1 = FCf × Lf が生じる(図2.2-a).
5. 自転モーメントによって前輪スリップ角が βf に変化する.後輪にもスリップ角 βr ,
コーナリングフォース FCr が生じる.
6. 自転モーメントが M2 = FCf · Lf − FCr · Lr に変化する.
7. コーナリングフォースの合力は FC = FCf + FCr となる.(図2.2-b).
8. FC は遠心力 CF = (W/g) · (vb2 /ρt ) と釣り合う.
9. 定常的に旋回(公転)をおこなう.
- 13 -
第2 章
ステアリング特性に基づく走行力学
δ
δfL
vfL
Lf
L
CF
δfR
vfR
βfL
vf
βfR
β
φ
vb
CF
φ
βrR
βrL
Lr
βf
vrR
vrL
vr
β
vb
βr
d
図 2.3: Bicycle model of a steering vehicle
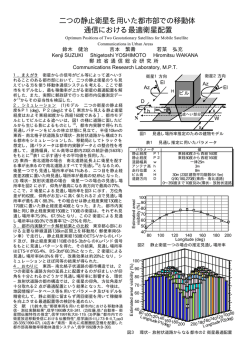
図2.3をもとに車体重心に加わる諸力の関係から,オンロード(整地)を定常旋回走行す
る車両の運動方程式を立て力学解析をおこなう[12].ただし β 1 と仮定した.
まず車体重心における力の釣り合いを考えると以下の式が成り立つ.
Lf φ̇
Lr φ̇
m · vb (β̇ + φ̇) = −2Cf (β − δ) +
− 2Cr β −
vb
vb
(2.3)
またモーメントの釣り合いを考えると,車体重心のヨー角加速度を φ̈,車体のz軸慣性
モーメントを Iz とするとヨーイングモーメントは,
Lf φ̇
Lr φ̇
Iz φ̈ = −2Lf Cf (β − δ) +
+ 2Lr Cr β −
vb
vb
(2.4)
となる.
ここで定常旋回とすると β̇ = 0,φ̈ = 0 であるから,
Lf φ̇
Lr φ̇
m · vb φ̇ = −2Cf (β − δ) +
− 2Cr β −
vb
vb
Lf φ̇
Lr φ̇
2Lf Cf (β − δ) +
= 2Lr Cr β −
vb
vb
(2.5)
(2.6)
さらにここでスタビリティファクタ Ks ,
Ks = −m ·
(Lf Cf − Lr Cr )
2L2 Cf Cr
- 14 -
(2.1)
2.3 ステアリング特性と旋回車両の運動方程式
turning radius : ρ
Ks > 0
Under-steer
Ks = 0
Neutral-steer
Ks < 0
Over-steer
v
velocity : b
図 2.4: Steady circle turning and steering characteristics
を用いると,重心ヨー角速度,旋回半径,重心スリップ角はそれぞれ以下のように導出
される.
vb
1
· δ
2
1 + Ks vb L
vb
ρ =
φ̇
L
1
·
=
2
1 + Ks vb δ
δ Lr − m(Lf /L)(1/2Cr )vb2
β =
·
L
1 + Ks vb2
φ̇ =
(2.7)
(2.8)
(2.9)
このようにスタビリティファクタは旋回速度とともに,定常旋回時のヨー角速度や旋
回半径あるいは旋回に必要なステアリング角がどのように変化するかを左右する重要な
物理量である.なお,スタビリティファクタの単位は[s2 /m2 ]となり,速度の2乗に逆比
例するような単位を持つ.つまり,このBicycleモデルは運動学に基づいた解析モデルで
あると言い換えることができる.
スタビリティファクタに応じて速度とともに定常円旋回がどのように変わるかを定性
的に示したものが図2.4となる.ステアリング角が一定のとき,Ks = 0 である車体の旋
回半径は速度に関係なく一定値となる.しかしながら Ks > 0 のときの車両は速度とと
もに旋回半径が増加し,一方 Ks < 0 では,速度とともに旋回半径が減少する.つまり
Ks > 0 のときステアリング角を一定に保って速度を増すと,もとの旋回半径を継続す
るにはステアリング角が不足するためこの特性をアンダステアと呼ぶ.また Ks < 0 の
ときはステアリング角を一定に保って速度を増すと,もとの旋回半径を継続するにはス
テアリング角が過剰であるためこの特性をオーバステアと呼ぶ.
- 15 -
第2 章
ステアリング特性に基づく走行力学
前後輪のスリップ角の導出
前後輪のスリップ角はそれぞれ,
βf = β − δ + sin−1
βr = β − sin−1
Lr φ̇
Vb
Lf φ̇
Vb
(2.10)
(2.11)
で表すことができ,コーナリングパワーとの積をとることによってそれぞれの車輪に加
わるコーナリングフォースが求められる.
2.4
テストベッドを用いたステアリング実験
これまで述べてきたBicycleモデルによる解析手法の確認とその問題点を明確にするた
め,本研究室で開発したローバーテストベッドを用いたステアリング実験をおこなった.
本実験では,オンロードにおいて定式化された解析手法がオフロード(不整地)において
どの程度適合するか,またはどの部分に不的確性が現れるかを確認する.
走行させる土壌は月土壌を模擬した「月レゴリスシミュラント」を用い,JAXA(宇宙
航空研究開発機構)の実験装置を使用して走行実験をおこなった.
2.4.1
実験概要
ローバーテストベッド概要
本研究室で開発されたローバーを図2.5に示す.本ローバーは4つの車輪を有しそれぞ
れの車輪の内部に駆動用のモータを備えることによって個々の車輪の独立駆動が可能と
なる.また車輪上部にはステアリング用のモータを取り付けることによって各車輪のス
テアリングも可能となる.大きさは0.95×0.70×0.56 [m]である.詳細は付録Aに記す.
実験装置概要
ローバー走行試験装置は,ローバー試作機及び搭載機の走行性能の評価をおこなうこ
とを目的に整備されたものである.
本装置には2000 × 1500 [mm],100 [mm]程度の深さの砂を入れることでき,斜度を40
度まで傾斜させることが可能である.機械的に模擬土壌をならすことにより再現性のあ
る実験をおこなうことが可能な点も特徴として挙げられる.また装置上部に固定した画
- 16 -
2.4 テストベッドを用いたステアリング実験
図 2.5: Rover test bed
表 2.1: Specifications of the rover experimental facility
環境維持シールド部
3500 × 2500 × 2400 [mm]
模擬月面有効寸法
2000 × 1500 [mm]
土壌深さ
100 [mm]程度
模擬レゴリス
清水建設製月土壌シミュラント「FJS-1」
最大傾斜角
40度,電動式傾斜駆動
傾斜角の計測
エンコーダ及び目視用角度目盛
位置計測用画像センサ
サイヴァース社製発光マーカ式3次元位置計測センサ
像センサにより物体の移動を実時間で計測可能である.図2.6に実験装置の概観を,表
2.1に実験装置の仕様をまとめる.
実験方法
本実験ではローバーの前輪のみにステアリング角を与え,走行実験をおこなった.こ
こでは,左15度および右30度のステアリング実験について述べる.実験時の走行の様子
を図2.7に示す.
実験のシステムの概念図を図2.8に示す.ローバーの走行制御は最初にLaptopPCから
目標車輪角速度をローバーに搭載した制御回路へ送信し,この制御回路によって各車輪
用の速度制御をおこなう.車輪の回転速度はエンコーダによって計測し,LaptopPC上
に保存される.また実験装置にはローバーの移動速度および移動軌跡を検出するための
- 17 -
第2 章
ステアリング特性に基づく走行力学
図 2.6: Overview of the rover experimental facility
画像センサがとりつけられており,このセンサ用にLaptopPCを1つ用意しデータロガー
としている.さらに車輪とステアリング軸の間にF/Tセンサを搭載し,車輪まわりに発
生した力データをLaptopPCによって計測する.
2.4.2
実験結果と数値計算結果の比較
実験データを用いた数値計算
2.3節において述べた解析方法に基づき,本ローバーテストベッドの旋回半径,前後輪
のスリップ角を算出するとともに,車輪に加わる力を計算する.計算は以下の手順によ
りおこなう.また図2.9に計算フローチャートを示す.
1. 前後車輪のコーナリングパワー,ホイールベースからスタビリティファクタを求める.
2. 重心角速度,重心旋回半径,重心スリップ角を算出する.
3. 重心スリップ角から前後車輪のスリップ角を求める.
4. 各車輪のスリップ角から第3章に示す車輪力学モデルを用いてサイドフォース,コー
ナリングフォースを計算する.
なお各車輪のコーナリングパワーは,車輪力学モデル(第3章参照)から得られるスリッ
プ角とコーナリングフォースの関係を用いて以下の手順によって求めた.
1. 実験データから得られる vb , rω を用いて,実験時のすべり率 s を求める.
2. すべり率,実験時の垂直荷重を入力値として,スリップ角-コーナリングフォース
曲線を求めコーナリングパワーを求める.
- 18 -
2.4 テストベッドを用いたステアリング実験
+Y
-Y
+X
(a):ステアリング角 = 左15 [deg]
+X
(b):ステアリング角 = 右30 [deg] 図 2.7: Rover steering expeiments at JAXA
- 19 -
第2 章
ステアリング特性に基づく走行力学
図 2.8: Schematic view of the experimental system
以上の計算プロセスによって得られた数値計算結果を表2.2にまとめる.同表よりスタ
ビリティファクタ Ks に注目すると,左15度のケースでは負の値すなわちオーバステア
の特性をもつ一方,右30度のケースでは正の値つまりアンダステアの傾向になるという
ことが予想される.
走行軌跡の比較
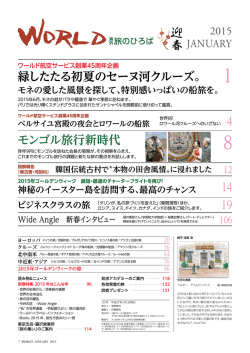
ステアリング実験より図2.10に示すようなローバーの走行軌跡が得られた.図2.10に
見られるようにステアリング角が左15度,右30度のいずれのケースにおいても,実際の
走行は最終的に理論走行軌跡よりも外側へ軌跡を描いている.これはローバーがアンダ
ステアの傾向にあることを示唆するものである.
最終的な誤差について注目すると,15度のケースでは,0.16 [m](左右車輪間隔=ト
レッドベースの0.7倍),30度のケースでは0.23 [m](左右車輪間隔=トレッドベースの1.1
倍)となり,ほぼ車体1つ分の誤差を生じてしまうことが分かった.
表2.2に示すように,右30度のケースではスタビリティファクタが0より大きくアンダ
ステアとなるが,しかしながら左15度のケースではスタビリティファクタは0より小さ
いため理論的にはオーバステアとなるはずである.しかしながら,図2.10-(a)では,初
期段階においてややオーバステアの傾向が見られるが途中から理論軌跡の外側へと走行
をおこなっている.この原因として考えられるのが,ローバーが独立の4輪駆動である
- 20 -
2.4 テストベッドを用いたステアリング実験
図 2.9: Calculation flow for bicycle model
表 2.2: Calculation results based on bicycle model
左15[deg]
ステアリング角
前輪
速度
垂直荷重
[m/s]
[N]
すべり率
コーナリングパワー
スタビリティファクタ
重心スリップ角
重心角速度
旋回半径
スリップ角
[N/rad]
後輪
0.083
右30[deg]
前輪
後輪
0.075
39.68
39.52
35.62
42.54
0.280
0.330
0.420
0.480
142.1
125.3
93.76
95.02
[rad·s2 /m2 ]
-0.016
0.002
[deg]
7.480
14.960
[rad/s]
0.045
0.082
[m]
1.830
0.920
[deg]
-0.019 -0.020
-0.044 -0.044
サイドフォース
[N]
0.016
0.017
0.032
0.030
コーナリングフォース
[N]
0.023
0.024
0.054
0.058
- 21 -
第2 章
ステアリング特性に基づく走行力学
X position [m]
0.6
Bicycle model
Experiment
0.3
0.2
0.1
0.0
0.0
0.2
0.4
0.6
0.8
1.0
1.2
Bicycle model
Expeiment
-0.1
0.4
Y position [m]
Y position [m]
0.5
0.0
0.0
-0.2
-0.3
-0.4
-0.5
0.2
0.4
0.6
0.8
1.0
1.2
-0.6
X position [m]
(a):ステアリング角 = 左15 [deg]
(b):ステアリング角 = 右30 [deg] 図 2.10: Results of steering expeiments
表 2.3: Comparison of side force based on bicycle model
ステアリング角
左15[deg]
右30[deg]
前輪
後輪
前輪
後輪
実験値[N]
8.92
-4.51
-2.38
10.60
計算値[N]
0.016 0.017 0.032 0.030
ため個々の車輪の特性,すなわちコーナリングパワーが変化してしまったと考えられる.
2.3節において示した解析手法は,左右の車輪のスリップ角は同等とみなし,4輪のモデル
を2輪のモデルに線形等価であると仮定したため,このような誤差が生じたと考えられる.
サイドフォースの比較
ローバーに搭載したF/Tセンサから得られた各車輪のサイドフォースは表2.3のように
なった.同表に計算によって得られたサイドフォースの値も示す.この表より,実験値
と計算値に非常に大きな誤差が見られる.この原因として2.3節に示す方法では式(2.3)
においてスリップ角が十分小さいとして近似をおこなっていたため,車輪に生じるサイ
ドフォース(コーナリングフォース)も必然的に小さく計算されてしまう.
各車輪について同様にコーナリングフォースが小さく算出されてしまうと,コーナリ
ングフォースの総和と遠心力の関係によって決定されるステアリング特性に誤りが生じ,
正確な挙動計算をおこなうことが困難になってしまうと考えられる.
- 22 -
2.4 テストベッドを用いたステアリング実験
2.4.3
従来の解析手法の不整地における問題点
従来の解析手法であるBicycleモデルを不整地に適用した場合の問題点について,実験
と数値計算からの結果をふまえて明示する.
Bicycleモデルにおける線形等価という仮定
まず整地におけるモデルではBicycleモデルとして車両の前後車輪をモデル化していた
が,不整地では各車輪の走行挙動が時々刻々変化し,特に土壌の状態が均一でない場合
はその変化は顕著となることは明らかである.
スリップ角が十分小さいという仮定
定式化においてスリップ角が十分小さいとして解析をおこなったが,不整地,とりわ
け砂地における走行では車輪は容易に滑る(空転,横滑り)を生じやすい.よってスリッ
プ角が十分小さい状態というのは非常に稀なケースであり,整地における解析手法を用
いることは不適切であると考える.さらにスリップ角が小さいという仮定に基づいて解
析をおこなうと,導出されるコーナリングフォースなどのステアリング時に車輪に生じ
る力も小さく計算されてしまう.前述のように各車輪に加わる力が小さくなってしまう
と,解析から導出される車体部分の挙動(遠心力の影響など)も大きく異なったものにな
り,正しい挙動計算をおこなうことが困難になってしまうと考えられる.
不整地における旋回車両の運動方程式
運動方程式を作る際に,近似を用いない定式化はおこなわれているが,その式は複雑
であり解析的に前後車輪のスリップ角を求めるのは非常に困難である[13].図2.11をも
とに以下の運動方程式を得る.
表記を簡単にするため車輪x方向の力を Fx = F ,y方向の力を Fy = S とする.まずx
方向の力の釣り合いより,
m{v˙b cos β − vb (β̇ + φ̇) sin β}
= Ff R cos δf R + Sf R sin δf R + Ff L cos δf L + Sf L sin δf L
+ FrR cos δrR + SrR sin δrR + FrL cos δrL + SrL sin δrL
- 23 -
(2.12)
第2 章
ステアリング特性に基づく走行力学
δfL
βfL
FfL
Lf
δfR
βfR
vfL
vfR
FfR
SfL
vb
β
SfR
φ
L
δrL
Lr
SrL
FrL
δrR
βrL
vrL
FrR
SrR
βrR
vrR
X
d
d
Y
図 2.11: Steering model on off-load
y方向の力の釣り合いより,
m{v˙b sin β − vb (β̇ + φ̇) cos β}
= −Ff R sin δf R + Sf R cos δf R − Ff L sin δf L + Sf L cos δf L
− FrR sin δrR + SrR cos δrR − FrL sin δrL + SrL cos δrL
(2.13)
重心周りのモーメントの釣り合いより,
I φ̈ = −d(Ff L sin δf L + Sf L cos δf L ) + Lf (−Ff L sin δf L + Sf L cos δf L ) (2.14a)
= d(Ff R sin δf R + Sf R cos δf R ) + Lf (−Ff R sin δf R + Sf R cos δf R ) (2.14b)
= −d(FrL sin δrL + SrL cos δrL ) + Lf (FrL sin δrL − SrL cos δrL )
(2.14c)
= d(FrR sin δrR + SrR cos δrR ) + Lf (FrR sin δrR − SrR cos δrR )
(2.14d)
となり,これらの式から解析的にスリップ角を求めることはほぼ不可能である.
2.5
本研究におけるステアリング解析アプローチ
本章で述べてきたように,整地におけるステアリング特性の解析モデルであるBicycle
モデルを不整地へ適用することは,多少の問題を伴うことが示された.月や惑星のよう
な不整地におけるステアリング特性を解析するという本研究の目的を満たすためには,
従来のアプローチをふまえたうえでさらに新しい解析方法を構築する必要がある.
- 24 -
2.5 本研究におけるステアリング解析アプローチ
Bicycle
((All-wheel
dynamics model)
ï
ï
ï
Bicycle
ï
図 2.12: Comparison between Bicycle model and All-wheel dynamics model
不整地におけるステアリング特性は,オーバステア,アンダステア,ニュートラルス
テアのうちいずれかの特性が1つだけ現れるのではなく,土壌の状態や車輪の走行状態
などにも依存するため,それら3つの特性が相互に影響しあいながら現れると考えられ
る.また整地走行をする車両,主に4輪駆動車のステアリング特性としてリバースステ
アと呼ばれるものがある.これはコーナー進入時にアンダーステアであったものが,あ
るポイントを境にオーバーステアへ切り替わってしまう特性のことをいう.このような
不安定なステアリング特性は不整地において顕著になると予想される.
そこで不整地におけるステアリング特性を議論するために,本研究では「全輪動力学
モデル」というアプローチを提案し,その力学特性を解き明かす.全輪動力学モデルで
は,車輪個々の挙動を別々に扱ったローバーの動力学モデルを構築することによりロー
バーのステアリング特性や挙動を解明するモデルである.
図2.12に示すように,車体の挙動解析に関して,Bicycleモデルでは運動学に基づく解
析であったのに対し,全輪動力学モデルでは動力学モデルを用いた解析をおこなう.ま
た,車輪の力学解析に関してBicycleモデルは線形等価近似をおこなっていたが,全輪動
力学モデルは,個々の車輪を扱いその力学関係についてモデル化をおこなう.
全輪動力学モデルを実現させるためには,まず第一に各車輪にどのような力が生じて
いるかを明らかにしなければならず,またそれら力をどのように定式化するかが重要で
ある.第1章で述べたように,不整地における車輪力学解析はテラメカニクスの分野で
盛んに研究されている.そこでテラメカニクスに基づいた解析をおこない,不整地をス
テアリング走行する車輪の力学モデルを次章において構築する.
- 25 -
第 3章
不整地におけるステアリング特性と車輪
力学モデル
3.1
はじめに
第2章において不整地におけるステアリング特性を解析するためには,個々の車輪に
どのような力が生じているかをモデル化する必要があると述べた.そこで本章において,
テラメカニクスに基づいた車輪力学の解析をおこない,不整地をステアリング走行する
車輪の新しい力学モデルを提案する.
車輪力学モデルに関しては,通常「硬い地面(アスファルト)と柔らかい車輪(ゴムタイ
ヤ)」という前提のもとに自動車工学等の分野において多くの解析がなされており,ステ
アリング時の車輪の挙動なども十分な研究がおこなわれている.一方,ローバーが活躍
する月や惑星は,流動性のある土壌で覆われ気温や気圧(月面上は真空)といった環境
条件も非常に厳しいものである.そのため金属製の車輪を用いることが一般的である.
よってローバーの挙動を解析する際,前述の概念と相反した「柔らかい地面と硬い車
輪」という概念のもとに解析をしなければならない.
テラメカニクスの分野においては,不整地上を走行する車輪のモデル化について多くの
報告例がある[7][8][13]-[17].また土壌のパラメータをリアルタイムで同定する手法の提案
[18]や,土壌の流動を考慮したシミュレーションモデルの構築[19]などもおこなわれている.
しかしながらステアリング時における力学解析について記したものは少なく,車輪横
方向の力・サイドフォースに関するモデルの報告例は非常に稀であり,一般的に確立し
たモデルは未だ存在しない.
本章では,まずはじめにステアリング時に車輪に作用する力について述べ,ステアリ
ング特性を解析するために必要な力学関係について明らかにする.次にテラメカニクス
- 27 -
第3 章
不整地におけるステアリング特性と車輪力学モデル
x
traveling direction
Fx
F
β (slip angle)
centrifugal direction
Cornering force : Fc
y
Fy
wheel
図 3.1: Geometric relationship for cornering force
のアプローチに基づき,車輪の走行状態を表現する重要なパラメータであるすべり率と
スリップ角を示し,車輪の応力モデルについて言及する.さらに車輪に生じる力・トル
クについて系統的にまとめ,サイドフォースの定式化において新しいモデルを提案する.
また数値シミュレーションをおこない,提案した車輪モデルに関してすべり率・スリッ
プ角と力(駆動力・サイドフォース)の依存関係を導く.
3.2
ステアリング時に車輪に作用する力
直進時の車輪には存在しないが,ステアリング時の車輪において存在する力は主に以
下の2つがある.
• コーナリングフォース
• セルフアライニングトルク
コーナリングフォースは先にも述べたように,各車輪のコーナリングフォースの総和
が車体の遠心力とつりあうような力である.図3.1に示すように幾何学的な関係よりコー
ナリングフォース FC は車輪縦方向の力である駆動力 Fx と車輪横方向の力・サイド
フォース Fy を用いて以下の式によって導出される.
FC = Fx sin β + Fy cos β
(3.1)
スリップ角 β が十分に小さい場合,コーナリングフォースはサイドフォースとほぼ等
価である.
一方セルフアライニングトルクとは車輪のz軸上に発生するトルクのことをいう.こ
のトルクが存在することにより,自動車がステアリングをおこなっているときを考える
- 28 -
3.3 テラメカニクスに基づく走行力学
x
traveling direction
slip angle : β
τz : Self-aligning torque
Fx
tr
y
Fy
図 3.2: Self-aligning torque
と,運転者がハンドルを離すと車輪(タイヤ)は元に戻ろうとし,ハンドルも直進状態に
復元する.ゆえにこのトルクを自己復元トルクとも呼ぶ.このセルフアライニングトル
ク τz は,図3.2に示すようにサイドフォース Fy の発生位置が車輪座標軸原点ではなく,
ある距離 tr だけ車輪後方にオフセットしている場合に発生する.この距離のことを,
ゴムタイヤの場合は「pneumatic trail」という.よってセルフアライニングトルクは,
τz = Fy × tr
(3.2)
として定義される.なおセルフアライニングトルクの詳細については第4章において示す.
式(3.1)と式(3.2)から,ステアリング時に発生するコーナリングフォースやセルフアライ
ニングトルクを構成している要素は,車輪の縦方向の力である駆動力と横方向のサイド
フォースであることがわかる.すなわち,ステアリング時の力学関係を議論するうえで
駆動力とサイドフォース,これら2つの力について明らかにしなければならない.
次節からこれら駆動力とサイドフォースをモデル化するために,テラメカニクスに基
づいた走行力学解析について述べる.
3.3
テラメカニクスに基づく走行力学
車輪の力学関係を議論するうえで,まずはじめに車輪座標系を定義する.車輪座標系
は図3.3に示すように車輪の縦方向をx,横方向をy,鉛直上向きをzとした右手系である.
この座標系は車輪の旋回(ヨー回転)にともなって座標系も回転するが車輪の転動(ピッチ
回転)にともなっては座標系は動かないものとする[20].ここで車輪の回転角速度を ω ,
車輪の移動速度を v とする.またこの v をx,y方向に分解したものを vx ,vy とし,車
輪x方向と移動速度 v のなす角を β とする.
- 29 -
第3 章
不整地におけるステアリング特性と車輪力学モデル
x
z
v
vx
ω
vx
vy
slip angle : β
x
r
y
z (Fz)
y
(Fy)
w
vy
vx
v
β
x
(Fx)
soil surface
図 3.3: Wheel coordinate
- 30 -
3.3 テラメカニクスに基づく走行力学
3.3.1
すべり率・スリップ角
一般に加速度を持って転動している車輪と路面(軟弱土壌の砂地などを含む)の間には
「すべり」が生じており,車輪の走行力学を考えるうえですべりの程度を知ることは重
要である.この「すべり」の概念はBekker[7]によって導入され,車輪のx方向の走行挙
動を表現する重要なパラメータである.このパラメータは「すべり率」と呼ばれ,車輪
のすべり率 s は車体の移動に対して車輪が空転する割合であり,車輪並進速度 vx と車
輪回転速度 ω を用い以下のように定義される.
(rω−v )
x
(rω > vx : 駆動時)
rω
s=
(rω−vx )
(rω < vx : 制動時)
vx
(3.3)
ただしすべり率は−1から1の範囲において定義される.
またスリップ角 β は車体の移動に対して車輪が横滑りをする角度であり,車輪横速
度と車輪進行速度によって以下の式で定義される.
β = sin−1
vy
v
(3.4)
このスリップ角はz軸反時計回りを正とする.
3.3.2
車輪の沈下
車輪に生じる力を計算するためには車輪と土壌の間にどのような現象が生じているか
把握することが重要となる.特に車輪の垂直応力・せん断応力を計算するためは,車輪
がどのぐらい土壌に沈下するかという沈下特性を知ることが必要である.車輪の沈下現
象は,静的沈下と動的沈下に分けられる.静的沈下とは車輪の重量によって沈む量であ
り,動的沈下とは車輪が転動し能動的に土壌を掘り下げることによって生じる現象のこ
とである.以降,軟弱地盤における車輪の沈下現象の定式化をおこなう.
静的な土壌圧力
車輪の静的な沈下現象を知るには土壌の深さに対応した土壌の圧力を知る必要があ
る.土壌圧力 p と沈下量 h の関係については種々の報告があるが,一般には,
p(h) = khn
(3.5)
という関係があると言われている.ここで k は土壌の変形係数である.この式は圧力沈下式と呼ばれBekker[7]によって提案され,図3.4に示すような平板貫入試験によって
求めることができる.
- 31 -
第3 章
不整地におけるステアリング特性と車輪力学モデル
W
soil surface
h
p
図 3.4: Pressure - sinkage experiment
W
r
soil surface
−θs
θ
θs
h(θ)
hs
p(θ)
図 3.5: Static sinkage
さらにBekkerは式(3.5)において k を土壌の粘性成分と摩擦成分に分けることによって,
kc
p(h) =
(3.6)
+ kφ hn
b
という実験式を提案した.ここで,kc ,kφ および n は土壌定数と呼ばれ,圧縮作用を
起こす時の土壌の強さを示す値である.
静的沈下
車輪が転動しない状態において車輪を土壌に置いた時に生じる沈下量,すなわち静的
沈下量は式(3.6)を応用することによって求めることができる.
図3.5に示すように,車輪がある静的沈下量 hs を生じて沈んでいることを考えると静
的沈下量は,
hs = r(1 − cos θs )
- 32 -
(3.7)
3.3 テラメカニクスに基づく走行力学
によって求めることができる.ここで車輪前方と後方のそれぞれの接地角度は等しいと
し θs とした.この θs の導出は車輪の垂直荷重と垂直抗力が等しいと考えることにより
以下のように計算できる.
まず車輪の接地位置を車輪角度 θ によって表すと,その位置における沈下量 h(θ) は
幾何学的に,
h(θ) = r(cos θ − cos θs )
(3.8)
となる.これを式(3.6)のBekkerの平板貫入の式に代入すると,
p(θ) = (
kc
+ kφ )(r(cos θ − cos θf ))n
b
(3.9)
となる.次に車輪幅 b と接地角から接地面全体を考えると静的な垂直抗力 Fz は,
θs
Fz =
p(θ)brdθ cos θ
−θs
kc
+ kφ {r(cos θ − cos θs )}n cos θdθ
= rb
b
−θs
θs
n+1
(kc + kφ b)
(cos θ − cos θs )n cos θdθ
= r
θs
(3.10)
−θs
となる.
式(3.10)から θs を求めるための逆計算は困難である.そこで Fz = W として二分法
を用いて両辺が等しくなるまで計算を繰り返すことにより θs を求める.その結果,静
的沈下量 hs は,
hs = r(1 − cos θs )
(3.7)
により求めることができる.
動的沈下
車輪は回転とともに土壌を能動的に掘削し動的に沈下するが,すべり率が一定の場合
には動的沈下量 hd が一定値に収束することが知られている.よって車輪と土壌のすべ
りによって生じる最終的な動的沈下量は,
hd = c0 s
(3.11)
によって表される.ここで c0 は動的沈下定数と呼ばれ,車輪の接地面における車輪面
形状および土壌に依存する定数である.
さらに図3.6に示すように動的沈下現象には沈下量が一定値になるまでの過渡状態が存
在する.すなわちこの過渡状態における沈下速度というものが存在し,この過渡状態の
- 33 -
第3 章
不整地におけるステアリング特性と車輪力学モデル
slip ratio = small
soil surface
slip ratio = large
図 3.6: Dynamic sinkage
沈下軌跡は制御工学でいわれる一次遅れ系で表現可能であるとされている[21].
dh
= c1 (hd − h)
dt
(3.12)
よって沈下量の時間変動式は沈下時定数 c1 を用いて以下のように表すことが出来る.
hd (t) = hd (1 − e−c1 t ) = −c0 s(1 − e−c1 t )
(3.13)
c1 は c0 と同様に,車輪の接地面における車輪面形状および土壌に依存する定数であ
るとともに,車輪の回転速度にも影響される定数である.
総沈下量
車輪の総沈下量 hall は静的・動的沈下量をあわせたものであり,
hall = hs + hd
(3.14)
と書くことができる.
3.3.3
車輪の入射角・離脱角
車輪において発生する力は,車輪と土壌において生じる応力を車輪接地面で積分する
ことによって計算できる.この車輪接地範囲を表現するために車輪入射角と車輪離脱角
と呼ばれるものが存在する.車輪入射角と離脱角を定式化するうえで,
「車輪の沈下は定
常状態である」という前提のもとに議論をおこなう.
- 34 -
3.3 テラメカニクスに基づく走行力学
ω
θr θf
h
κh
図 3.7: Entry angle and exit angle model
車輪入射角
車輪の進入角を定式化するうえで,
「車輪は転動中に前方には影響を及ぼさない」と仮
定する.これにより図3.7に示すように幾何学的関係から θf は,
r = r cos θf + h
より,
h
θf = cos−1 (1 − )
r
(3.15)
と定式化できる.
車輪離脱角
車輪の離脱角の定式化は非常に困難であり一般的な方法は確立していない.例とし
て,笈田ら[14]によると車輪の離脱角 θr は,
θr = θf − 2θm
(3.16)
て定義されると記した.ここで θm は車輪下部の垂直応力が最大となる角度である(詳細
は3.3.4節).しかしながら,車輪後方の土壌の状態は車輪の形状によってしばしば変わ
ることが経験的に知られている.車輪表面が水車のような「パドル」を有していた場合,
土壌を後方へ掻きあげるということが観察され,入射角における沈下量よりも離脱角付
近の沈下量の方が大きくなる.また平滑な車輪表面であればその逆の現象が観察される.
つまり車輪の表面形状に依存し,車輪入射角を用いて相対的に表現できるパラメータが
必要となる.よって本研究においては図3.7のように「土壌は,車輪の前方において圧縮
され後方で開放される.そしてその体積比を離脱角定数 κ で表すことができる」と仮定
をする.
- 35 -
第3 章
不整地におけるステアリング特性と車輪力学モデル
ω
r
vx
θf
θr
θm
σ(θ)
図 3.8: Distribution of the normal stress under a rigid wheel on loose soil
これにより次式を得る.
θr = cos−1 (1 −
3.3.4
κh
)
r
(3.17)
車輪垂直応力モデルの検討
砂質地面上を車輪が転動すると,図3.8に示すように,車輪の法線方向に垂直応力 σ
が生じる.その分布については,多くの論文により様々なモデルが提案されている.こ
こでは,これまで提案されてきた主な垂直応力モデルと本研究室において構築されたモ
デルについて述べる.
基本的に垂直応力分布は放物線近似がもとになっているが,本研究では代表的な以下
のモデルについて触れる.
1: Bekkerの土壌圧力式に基づく垂直応力モデル[7].
2: Reeceの土壌圧力式に基づく垂直応力モデル[22].
3: 線形近似モデル[17].
4: 本研究室におけるモデル[24].
また表現を簡易的にするため垂直応力を最大応力発生角 θm によって車輪前方と後方に
分割して考え,それぞれ以下のように定義する.
σ(θ) = σf (θ) (θm ≤ θ < θf )
σ(θ) = σr (θ) (θr < θ ≤ θm )
- 36 -
3.3 テラメカニクスに基づく走行力学
ここで θm はその角度において垂直応力が最大となる車輪接地角度である.θm の定義式は
いくつか報告されているが,本研究では最も一般的に用いられている以下の式を用いる.
θm = (a0 + a1 s)θf
(3.19)
a0 ,a1 は定数であり,それぞれの一般的な値は a0 ≈ 0.4,0 ≤ a1 ≤ 0.3となっている[22].
Bekkerの土壌圧力式に基づく垂直応力モデル
このモデルはBekkerによって提案されたもので,Bekkerの土壌圧力式を用いて垂直応
力をモデル化する.
p(h) =
kc
+ kφ hn
b
(3.6)
この式を用いた垂直応力分布モデルは以下のようになる.
kc
+ kφ [r(cos θ − cos θf )]n
σf (θ) =
b
n
kc
θ − θr
+ kφ r(cos{θf −
σr (θ) =
(θf − θm )} − cos θf )
b
θm − θr
(3.20a)
(3.20b)
Reeceの土壌圧力式に基づく垂直応力モデル
Wongらによって提案されたこのモデルは,土壌圧力の式をBekkerではなくReeceに
基づいたものを用いた.Reeceの土壌圧力式は次のように書くことができる.
h
p(h) = ckc + ρkφ b ( )n
(3.21)
b
参考文献[8]によると,Reeceの式は次の点においてBekkerの式を改善したと述べている.
1. kc ,kφ が n に依存する次元を持つのに対し,kc ,kφ は無次元である.
2. 土質力学における圧力の式(テルツァギの支持力方程式)などと同様の意味合いを持
つため理論的アプローチとの一致を見せる.
なお,式(3.6),式(3.21)は n = 1 ならば同じ式となる.このとき,ckc = kc ,ρkφ = kφ
となる.
式(3.21)をもとに構築される垂直応力モデルは次のようになる.
r n
σf (θ) = kc + kφ b
[(cos θ − cos θf )]n
(3.22a)
b
r n n
θ − θr
(cos{θf −
σr (θ) = kc + kφ b
(θf − θm )} − cos θf ) (3.22b)
b
θm − θr
ここでは,ckc = kc , ρkφ = kφ とした.
- 37 -
第3 章
不整地におけるステアリング特性と車輪力学モデル
線形近似モデル
このモデルでは式(3.20a),式(3.20b)をもとに線形近似をおこなっている.
θf − θ
σmax
θf − θm
θ − θr
σmax
σr (θ) =
θm − θr
σf (θ) =
ここで,σmax は,
σmax =
(3.23a)
(3.23b)
kc
+ kφ [r(cos θm − cos θf )]n
b
(3.24)
により与えられる.
本研究室におけるモデル
本モデルは,Wongによって提案されたモデルを応用したモデルである.
最大応力発生角 θm において最大応力値 σmax を取るとし,式(3.22a),式(3.22b)を書
き直すと,
σf (θ) = σmax {(
σr (θ) = σmax {(
cos θ − cos θf n
) }
cos θm − cos θf
r
(θf − θm )} − cos θf
cos{θf − θθ−θ
m −θr
cos θm − cos θf
(3.25)
)n }
(3.26)
となる.このモデルでは土壌パラメータであるkc ,kφを垂直応力分布の導出に使用して
いない.実際に車輪が転動し土壌を掘る現象に注目すると,常にkc ,kφが一定値をとる
ことは難しく,時々刻々土壌状態は変化すると考えられる.よって σmax の導出がキー
ポイントとなる.
もし σmax を,
r
σmax = (kc + kφ b)( )n (cos θm − cos θf )n
b
(3.27)
のように定義すると式(3.25),式(3.26)は,Wongモデルの式(3.22a),式(3.22b)と同一に
なってしまう.そこで車輪の入射角 θf ,離脱角 θr が与えられたとき,
θf
W = Fz = rb
(σ(θ) cos θ + τx (θ) sin θ)dθ
(3.28)
θr
となるような,σmax を二分法によって求める.なお式(3.28)の最右辺については3.3.6節
において示す.
このモデルでは,車輪が転動する際のz軸方向の力の釣り合いからその都度 σmax を計
算し変化させることによって垂直応力分布をモデル化する方法であり,土壌のパラメー
タ(kc ,kφ )が未知の環境においても垂直荷重が垂直応力分布を導くことが可能である.
- 38 -
3.3 テラメカニクスに基づく走行力学
ω
r
z
θr
X
vx
θf
θm
τx(θ)
τ y(θ)
y
X
vx
v
vy
b
β (Slip angle)
図 3.9: Distribution of the shear stress under a rigid wheel on loose soil
垂直応力モデルの比較・検討
以上示した4つの垂直応力モデルについて数値計算によって比較し,どのモデルが最
適か検討をした.詳細は3.5.2節において述べる.
3.3.5
車輪せん断応力モデル
図3.9に示すように,車輪の接線方向および車輪y方向へのすべりによって生じるせん
断応力は土質工学の分野で古くから研究がおこなわれ,その特性については十分知ら
れているが,せん断時の応力ー変位曲線を数式化する試みは当初少なかった.しかし,
Janosi,Hamamotoら[25]によって極大値を持たない応力−変位曲線図(図3.10)を次式に
より定義した.
τ = τmax [1 − e−j/k ]
(3.29)
τmax = c + σ tan φ
(3.30)
ここで,τmax は,変位-せん断応力曲線の最大値である.j は土壌の変形量(せん断変位
量),k は変形係数で図3.10に示すように曲線の時定数に対応するとともに,走行する車
- 39 -
第3 章
不整地におけるステアリング特性と車輪力学モデル
Shear stress :
τ
τmax
0.63τmax
k
displacement : j
図 3.10: Shear stress - displacement curve
輪の形状にも依存する係数である.また c,φ は土壌固有の値であり,それぞれ土壌粘
着力,土壌の内部摩擦角と呼ばれる.
車輪x方向のせん断応力
式(3.30)において,垂直応力 σ を前述の σ(θ) に置き換えると,まず車輪x方向のせん
断応力 τx (θ) が分かる.
τx (θ) = (c + σ(θ) tan φ)[1 − e−jx (θ)/kx ]
(3.31)
ここで,x方向の土壌変形量 jx (θ) の導出は,すべり速度 vjx (θ) をもとに計算される.
すべり速度は,車輪円周速度と車輪並進速度の円周接線方向速度の差として与えられる
(図3.11).
vjx (θ) = rω − vx cos θ = rω[1 − (1 − s) cos θ]
(3.32)
より,
t
θf
1
rω[1 − (1 − s) cos θ] dθ
ω
θ
0
= r[θf − θ − (1 − s)(sin θf − sin θ)]
jx (θ) =
vjx (θ)dt =
(3.33)
車輪y方向のせん断応力
次に車輪y方向のせん断応力であるが,x方向と同様にまずはy方向の土壌変形量 jy (θ)
を求める.そのためにはまずy方向のすべり速度 vjy (θ) が必要となるが vjy (θ) = vy で
- 40 -
3.3 テラメカニクスに基づく走行力学
r
ω
vx
θf
vxcosθ
θ
vjx
vx
θ
図 3.11: Slip velocity on a circumference of a wheel
あるから,土壌変形量 jy (θ) は,
jy (θ) =
0
t
vjy (θ)dt =
θ
θf
1
v sin β dθ
ω
v sin β
=
(θf − θ)
ω
= r(1 − s)(θf − θ) · tan β
(3.34)
となる.よってy方向のせん断応力 τy (θ) は以下の式で導出できる.
τy (θ) = (c + σ(θ) tan φ)[1 − e−jy (θ)/ky ]
3.3.6
(3.35)
駆動力・垂直抗力・回転抵抗
Bekkerはこれまで述べてきた垂直応力およびせん断応力を用い,それらを車輪接地領
域において車輪進入角から離脱角まで積分することにより車輪に生じる力を計算するこ
とが可能であるとした[7].
駆動力
駆動力 Fx は図3.12のように垂直応力・せん断応力のx方向成分の差から以下の式に
よって算出される.
θf
Fx = rb
{τx (θ) cos θ − σ(θ) sin θ}dθ
θr
- 41 -
(3.36)
第3 章
不整地におけるステアリング特性と車輪力学モデル
Fz
(Vertical force)
Fx
Z
(Drawbar pull)
X
θ
τ x (θ)
σ(θ)
σ sin θ
σcos θ
τ x cosθ
τ x sinθ
図 3.12: Drawbar pull and vertical force derived from the normal and the shear stresses
垂直抗力
垂直荷重 W とつりあう垂直抗力 Fz は図3.12のように垂直応力・せん断応力のz方向
成分の和から以下の式によって算出される.
θf
Fz = rb
{τx (θ) sin θ + σ(θ) cos θ}dθ
(3.37)
θr
回転抵抗
車軸の回転抵抗T は,x方向のせん断応力 τx (θ) の総和として,
θf
2
T =r b
τx (θ)dθ
(3.38)
θr
のように記述することができる.
3.4
サイドフォースの定式化
本節ではステアリング時に発生する力であるサイドフォースの定式化をおこない,車
輪モデルを提案する.
車輪に生じるサイドフォースを Fy としたとき,本研究ではサイドフォースを構成す
る力は図3.13に示すように主に以下の2つに分けることが出来ると考える[26].
Fu · · · 車輪下部のせん断応力 τy によって発生する力
- 42 -
3.4 サイドフォースの定式化
Fy
Fs
Fu
図 3.13: Modeling of wheel side force
Fs · · · 沈下した車輪の側面部が土壌を押しのけることによって発生する力
よってサイドフォースは,
Fy = Fu + Fs
(3.39)
のように定式化することができる.
3.4.1
Fu : 車輪下部のせん断応力によって発生する力
以下 Fu を求める方法について考える.前述のように,Fu は車輪下部のせん断応力
τy (θ) によって発生する力であるから,式(3.35)によって計算された τy (θ) を車輪入射角
から離脱角まで積分することにより導出できる.
θf
Fu = rb
τy (θ)dθ
(3.40)
θr
3.4.2
Fs : 沈下した車輪の側面部分において発生する力
車輪側面部分への力を求める際に,排土抵抗(Bulldozing resistance)推定法の理論を
用いる.排土抵抗とは建設・土木作業機械のブルドーザーのように,土壌を板状の面接
触によって押しのけるときに反力として発生する抵抗である.よって,もとはこの排土
抵抗推定法はブルドーザーのブレード部分の力学解析や,履帯移動機械などの走行抵抗
の解析に用いられていた.しかしながら,
「土壌を押しのける(Bulldoze)」という現象は,
- 43 -
第3 章
不整地におけるステアリング特性と車輪力学モデル
Unit width blade soil surface
45o-φ
Bulldozed area
h
Rb
α
Destructive pshase
図 3.14: Bulldozing resistance estimation based on Bekker’s theory
沈下した車輪側面部が土壌を押しのける現象を的確に表現しているため,本研究ではこ
の点に着目し排土抵抗推定法を応用した力の導出をおこなう.
排土抵抗(Bulldozing resistance)推定法では,土壌粘着力,土壌の内部摩擦角といっ
た土壌のパラメータを使用するため,これまで述べてきた垂直応力やせん断応力と同様
にある土壌に対し一意に数式を構築できると考えられる.
まずはじめにBekkerおよびHegedusによって提唱された2種類の排土抵抗推定法につ
いて述べ,どちらの理論を用いるかを議論し,この推定方法を応用した車輪側面力学モ
デルを構築する.
Bekkerの排土抵抗推定法
図3.14に示すように土中の単位幅の板が右方向に移動した場合,その板に受動土圧が
作用する.その受動土圧の水平成分 Rb [N/m]が排土抵抗になる.Bekkerは板の前方に
発生する土のせん断破壊面が対数螺旋になると仮定し,排土抵抗を次式で表した[27].
sin(α + φ) cos φ
1 2 2Nr
+1
(3.41)
Rb (h) =
h · c(Nc − tan φ) + ρh
sin α
2
tan φ
ここで,
α : 接近角
ρ : 土壌の密度
Nc , Nr : テルツァギの支持力係数
である.テルツァギの支持力係数(Nc ,Nr )は内部摩擦角によって一意に決まるパラメー
タである.
- 44 -
3.4 サイドフォースの定式化
Unit width blade
ground swell
φ
h0
soil surface
Bulldozed area
Rb
h
α'
Xc
Destructive pshase
図 3.15: Bulldozing resistance estimation based on Hegedus’s theory
Hegedusの排土抵抗推定法
図3.14と同様に図3.15に示すように土中の単位幅の板が右方向に移動した場合,その
板に受動土圧が作用する.その受動土圧の水平成分 Rb が排土抵抗になる.Hegedusは
土中の板が右方向に移動すると,土は直線状の破壊を起こし土は前上方に盛り上がって
くると仮定した[28].さらに,内部摩擦角 φ が安息角に等しいとして排土抵抗を次のよ
うに表した.
1 2
cot Xc + tan(Xc + φ)
(cot Xc − tan α )2
h · c + ρh (cot Xc − tan α ) +
Rb (h) =
1 − tan α tan(Xc + φ)
2
tan α + cot φ
(3.42)
ここで,
Xc : 地表面と破壊面のなす角
α : 接近角(Bekkerの理論とは異なる)
である.図中 h0 は土壌の盛り上がった高さを意味し,幾何学的に,
h0 =
h(cot Xc − tan α )
tan α + cot φ
(3.43)
によって求めることができる.
両者の比較
Bekkerによる推定方法は車輪側面部分の土の盛り上がりを無視することになってしま
うという点と,未知のパラメータであるテルツァギの支持力係数なるものが2つあるた
め推定が困難になるといった欠点がある.実際にある程度沈下した車輪が軟弱地盤上を
走行すると,図3.16のように車輪側面部分に土壌の盛り上りが発生する.
- 45 -
第3 章
不整地におけるステアリング特性と車輪力学モデル
traveling direction
Ground swell
図 3.16: Ground swell sideward the wheel
そこで本研究ではHegedusの排土抵抗推定方法を用いて計算をおこなう.なお未知パ
ラメータである土壌の破壊角度 Xc はBekkerの理論を適用し,
Xc = 45◦ −
φ
2
(3.44)
として与える.
3.4.3
Hegedusの排土抵抗推定方法を用いたFs の導出
図3.17に示すようにある沈下量hだけ沈んでいる車輪において,車輪側面部と土壌が
接している部分を単位幅に分割して考えると,その単位幅あたりに作用する抵抗が排土
抵抗Rb となる.
車輪の場合,接近角 α は0度であるから式(3.42)は,
1 2
cot2 Xc
Rb (h) = {cot Xc + tan(Xc + φ)} h · c + ρh cot Xc +
2
cot φ
(3.45)
となる.ここで沈下量 h は,
h(θ) = hs (θ) + hd (s)
(3.14)
すなわち,
h(θ) = r(cos θ − cos θf ) + c0 s
(3.46)
によって与えられるため,式(3.45)は車輪の走行状態を表現できる式であると言える.
また式(3.45)において,土壌定数によって構成される部分をそれぞれ D1 ,D2 とし,書
- 46 -
3.4 サイドフォースの定式化
Rb
h
unit width
図 3.17: Bulldozing resistance generated at the sideward of the wheel
き直すと,
1 2
Rb (h) = D1 · h(θ) · c + ρh (θ) · D2
2
D1 (Xc , φ) = cot Xc + tan(Xc + φ)
cot2 Xc
D2 (Xc , φ) = cot Xc +
cot φ
(3.47)
(3.48)
(3.49)
最終的に Fs は Rb を θ について車輪進入角 θf から離脱角 θr まで積分することに
よって以下のように計算できる.
θf
Fs =
Rb (h)dx
θr
θf
Rb (r − h(θ) cos θ)dθ
θf 1 2
h(θ) + ρh (θ)D2 {r − h(θ) cos θ}dθ
= D1
2
θr
=
θr
(3.50)
以上,本研究において提案するサイドフォースの導出についてまとめると,
Fy = Fu + Fs
θf
τy (θ)dθ
Fu = rb
(3.39)
(3.40)
θr
θf
Fs = D1
θr
1 2
h(θ) + ρh (θ)D2 {r − h(θ) cos θ}dθ
2
となる.
- 47 -
(3.50)
第3 章
不整地におけるステアリング特性と車輪力学モデル
Fssinβ
β (Slip angle)
Fx
Fy
vx
v
Fs
vy
Fscosβ
図 3.18: Revised drawbar pull and side force
修正された駆動力,サイドフォース
3.4.4
先に述べた Fs の加わる方向について考慮すると,図3.18に示すように排土抵抗は車
輪の進行方向,すなわち v と平行方向に生じる.そのためFsは車輪x方向とy方向に分解
して考える必要があり,このとき修正される駆動力およびサイドフォースは以下のよう
になる.
Fx = Fx − Fs cos β
(3.51)
Fy = Fu + Fs sin β
(3.52)
以降の記述では,Fx = Fx ,Fy = Fy として扱う.
3.5
数値シミュレーション
本節ではこれまで示してきた車輪力学モデルについて,1輪における数値シミュレー
ションをおこない提案したモデルに関して,まずはじめに垂直応力分布のモデルの比較
検討をおこなう.さらにすべり率・スリップ角と力(駆動力・サイドフォース)の依存関
係を明らかにする.
3.5.1
計算プロセス
数値計算では,車輪の走行状態,車輪のパラメータを入力値として以下のプロセスに
より,力を計算する.計算のプロセスを図3.19に示す.
1. 垂直荷重 Fz ,車輪進行速度 v ,スリップ角 β 等を入力する.
2. 車輪の静的沈下量 hs および動的沈下量 hd を求め,総沈下量 h を算出する.
3. 車輪の進入角 θf ,離脱角 θr を計算する.
- 48 -
3.5 数値シミュレーション
Input
W : wheel load
b : wheel width
r : wheel radius
v : traveling velocity
ω : angular velocity
β : slip angle
s : slip ratio
hs : static sinkage
hd : dynamic sinkage
h : wheel sinkage (h=hs+hd)
θf : angle of approach
θr : angle of departure
σ : normal stress
Rb : Bulldozing resistance
τ : shear stress
Fx : Drawbar pull
FC :Cornering force
Fy : Side force
τz : Self-aligning torque
図 3.19: Calculation flow for the numerical simulation
- 49 -
第3 章
不整地におけるステアリング特性と車輪力学モデル
表 3.1: Parameters for the numerical simulation
パラメータ
数値
単位
備考
a0
0.4
参考文献[17]
a1
0.15
参考文献[17]
b
0.107
[m]
実験用車輪と同値
c
0.8
[kPa]
参考文献[29][30]
c0
0.015
kc
1.37 × 103
[N/mn+1 ]
参考文献[31]
kx
0.014 ∼ 0.023
[m]
β に依存
ky
0.016 ∼ 0.022
[m]
β に依存
第4章参照
5
kφ
8.14 × 10
n
1.0
r
0.092
s
0∼1
vb
0.036
[m/s]
実験用車輪と同値
W
64.7
[N]
実験用車輪と同値
Xc
26.4
[deg]
第4章参照
β
0 ∼ 20
[deg]
状態変数
φ
37.2
[deg]
参考文献[29][30]
κ
0.01 ∼ 0.05
ρd
3.7 × 103
n+2
[N/m
]
参考文献[31]
参考文献[31]
[m]
実験用車輪と同値
状態変数
sに依存
[kg/m3 ]
参考文献[30]
4. 排土抵抗 Rb (h) を求める.
5. 車輪の垂直応力 σ(θ),せん断応力 τx (θ),τy (θ) を求める.
6. 式(3.36)により Fx を求める.
7. 式(3.40),式(3.50)により Fu ,Fs を算出し,式(3.39)を用いてサイドフォース Fy
を得る.
8. 式(3.1)によってコーナリングフォースを,後述する式(4.4)によってセルフアライニ
ングトルクを求める.
また土質固有の諸パラメータおよび車輪のパラメータを表3.1に示す.なおシミュレー
ションにおいて想定した土壌は「月レゴリスシミュラント」(第4章参照)と呼ばれるもの
であり,各種パラメータは参考文献[31]やパラメータ同定実験によって求めた.表3.1に
おいて,kc ,kφ ,n の3つの土壌パラメータは平板貫入試験によって得られるものであ
- 50 -
3.5 数値シミュレーション
るが,信頼性の高いパラメータを得ることが非常に困難であることが報告されている
[8][13]-[15].そこで本研究では参考文献[31]によって報告されたパラメータを用いること
とする.この文献において用いられた土壌は「Lunar soil」と呼ばれるものであり「月
レゴリスシミュラント」とほぼ同等の特性を持つと考えられる.
垂直応力分布の比較検討
3.5.2
3.3.4節において示した4つの垂直応力モデルの比較検討をおこなう.
4種類の垂直応力モデルをそれぞれ数値計算プログラムに組み込み,それらの計算結
果を比較する.計算をおこなったモデルは以下のとおりである.
model-1 :Bekkerの土壌圧力式に基づく垂直応力モデル[7].
model-2 :Reeceの土壌圧力式に基づく垂直応力モデル[22].
model-3 :線形近似モデル[17].
model-4 :本研究室におけるモデル[24].
計算条件,変数等の設定を以下に列挙する.
• kc = kc ,kφ = kφ とする.
• n = 1の場合,model-1とmodel-2の結果が一致するため,n = 0.5の場合について
も計算をおこなった.
• その他の変数は全て一定とする.
比較検討をおこなうグラフは,以下のとおりである.
• 車輪角度 θ - 垂直応力 σ グラフ
• すべり率 s - 垂直抗力 Fz グラフ
• すべり率 s - 駆動力 Fx ,および駆動力係数 Fx /Fz グラフ
• すべり率 s - サイドフォース Fy ,およびサイドフォース係数 Fy /Fz グラフ
- 51 -
第3 章
不整地におけるステアリング特性と車輪力学モデル
車輪角度 θ - 垂直応力 σ
図3.20に得られた計算結果を示す.いずれのすべり率および n に対しても,それぞれ
の垂直応力分布モデルに顕著な違いが見られる.n = 1.0に注目したとき,s = 0.5まで
はmodel-4モデルが他のモデルよりも大きい垂直応力分布を示しているが,s = 0.9では
それとは異なりmodel-4が最も小さい応力分布を示している.この傾向は次に示す「す
べり率 s - 垂直抗力 Fz グラフ」においても大きな影響を与える.
すべり率s - 垂直抗力Fz グラフ
図3.21に計算結果を示す.model-4は垂直荷重と垂直抗力がつりあうように σmax を定
義するため,model-4の計算結果は垂直荷重と同じ数値となる.n = 0.5のとき,model-4
以外ではすべり率が大きくなるに従って,与えた垂直荷重よりも非常に大きい垂直抗力
が得られている.これは車輪の垂直荷重と垂直抗力がつりあっておらず,実際の現象に
置き換えると「車輪が沈まない」ということを意味する.また n = 1.0では与えた垂直
荷重よりも小さい反力しか発生していない.これはmodel-1からmodel-3において,まだ
車輪が沈下できるにもかかわらず定常状態としてしまっている.つまり本来であれば垂
直荷重と垂直抗力が釣り合わなければいけないにもかかわらず,model-4以外では,そ
の均衡が崩れていることがわかる.この問題の原因は的確な kc ,kφ が適宜与えられて
いないことに起因する.
以上よりmodel-4の利点は,「kc ,kφ が未知(あるいは不均一)である土壌に対して,
n さえ分かれば垂直応力分布を的確にモデル化することが可能となる」,という点であ
ることが計算結果からも確認された.
すべり率 s - 駆動力 Fx ,駆動力係数 Fx /Fz グラフ
図3.22にそれぞれの結果を示す.
n = 0.5のときに駆動力はmodel-1が最も大きくなってしまっており,通常では考えら
れない数値となっている.このような結果が得られた原因として,図3.20や図3.21に示
すようにn = 0.5のケースではmodel-1の計算結果の数値が最も大きく,次いでmodel-3,
model-2となっており,model-4に比べると非常に数値が大きいことが分かる.Fx は,
θf
Fx = rb
{τx (θ) cos θ − σ(θ) sin θ}dθ
(3.36)
θr
によって定式化されているが,せん断応力 τx (θ) も,
τx (θ) = (c + σ(θ) tan φ)(1 − exp−jx (θ)/kx )
- 52 -
(3.31)
4
8x10
s = 0.1
model-1
model-2
model-3
model-4
6
4
2
0
0.0
0.2
0.4
0.6
Normal stress : sigma [Pa]
Normal stress : sigma [Pa]
3.5 数値シミュレーション
2.0x10
4
s = 0.1
model-1
model-2
model-3
model-4
1.5
1.0
0.5
0.0
0.0
4
s = 0.5
6
4
2
0
0.0
0.2
0.4
0.6
2.0x10
s=0.5
1.0
0.5
0.0
0.0
4
2
0
0.4
0.6
Normal stress : sigma [Pa]
Normal stress : sigma [Pa]
0.4
0.6
0.8
(n=1.0 , s=0.5)
6
0.2
0.2
wheel angle : theta [rad]
s = 0.9
0.0
0.8
1.5
(n=0.5 , s=0.5)
4
0.6
4
wheel angle : theta [rad]
8x10
0.4
(n=1.0 , s=0.1)
Normal stress : sigma [Pa]
Normal stress : sigma [Pa]
(n=0.5 , s=0.1)
8x10
0.2
wheel angle : theta [rad]
wheel angle : theta [rad]
wheel angle : theta [rad]
2.0x10
4
s=0.9
1.5
1.0
0.5
0.0
0.0
0.2
0.4
0.6
0.8
wheel angle : theta [rad]
(n=0.5 , s=0.9)
(n=1.0 , s=0.9)
図 3.20: Comparison of normal stress models (wheel angle θ - normal stress σ)
- 53 -
第3 章
不整地におけるステアリング特性と車輪力学モデル
100
300
n = 0.5
model-1
model-2
model-3
model-4
Normal force [N]
Normal force [N]
400
200
100
80
Wheel weight
60
n = 1.0
model-1
model-2
model-3
model-4
40
20
Wheel weight
0
0.0
0.2
0.4
0.6
0.8
0
0.0
1.0
0.2
0.4
0.6
Slip ratio
Slip ratio
(n=0.5)
(n=1.0)
0.8
1.0
図 3.21: Comparison of normal stress models (slip ratio s - vertical force Fz )
に示されるように σ(θ) の関数であり,σ(θ) の分布が大きくなれば必然的にせん断応力
τx (θ) も増加する.よって図3.22のように非常に大きな駆動力が計算されてしまったの
ではないかと考える.
しかしながら駆動力係数のグラフに注目すると,全てのモデルの計算結果はある程度
の範囲に収まっている.これはすべり率に伴って駆動力が驚異的に増加する一方で図
3.21に示すように垂直抗力も同様に増加しているため,駆動力係数を算出したときに概
ね一様な傾向になってしまったと考えられる.
また定量的な評価をおこなうと,model-4によって得られたすべり率-駆動力曲線は,
実験によって得られる曲線とよく一致していることがわかる(第4章参照).
すべり率 s - サイドフォース Fy ,サイドフォース係数 Fy /Fz グラフ
計算結果を図3.23に示す.この計算ではスリップ角を12 [deg]とした.
n = 0.5のケースにおいて得られるサイドフォースの傾向は,ピーク値を持つ部分が
model-4以外はよく一致しているが,実際の現象で考えるとすべり率が大きい領域にお
いてサイドフォースはピーク値を持たないことが一般的である.
またn = 1.0のケースでも,すべり率が小さい領域において特にmodel-4との違いが顕
著である.図3.20を見ると,やはりすべり率の小さい領域(s=0.5付近)では,model-4の
垂直応力分布の方が大きい.サイドフォース Fy を構成する力の1つである Fu は,
θf
Fu = rb
τy (θ)dθ
(3.40)
θr
によって定義され,ここで τy (θ) は,
τy (θ) = (c + σ(θ) tan φ)[1 − e−jy (θ)/ky ]
- 54 -
(3.35)
3.5 数値シミュレーション
25
100
80
n = 0.5
model-1
model-2
model-3
model-4
20
Drawbar pull : Fx [N]
Drawbar pull : Fx [N]
120
60
40
20
15
10
5
n = 1.0
model-1
model-2
model-3
model-4
0
-5
0
0.0
0.2
0.4
0.6
0.8
-10
0.0
1.0
0.2
0.3
0.2
0.1
n = 0.5
model-1
model-2
model-3
model-4
-0.1
0.0
0.2
0.4
0.6
0.8
1.0
(n=1.0 Drawbar pull)
Fx / Fz : Drawbar-pull / Weight
Fx / Fz : Drawbar-pull / Weight
(n=0.5 Drawbar pull)
0.0
0.4
Slip ratio
Slip ratio
0.6
0.8
0.3
0.2
0.1
-0.1
0.0
1.0
n = 1.0
model-1
model-2
model-3
model-4
0.0
0.2
0.4
0.6
0.8
1.0
Slip ratio
Slip ratio
(n=0.5 Drawbar pull coefficient)
(n=1.0 Drawbar pull coefficient)
図 3.22: Comparison of normal stress models (slip ratio s - drawbar pull Fx ,drawbar
pull coefficient Fx /Fz )
- 55 -
第3 章
不整地におけるステアリング特性と車輪力学モデル
14
n = 0.5
model-1
model-2
model-3
model-4
20
Side force : Fy [N]
Side force : Fy [N]
25
15
10
5
n = 1.0
model-1
model-2
model-3
model-4
12
10
8
6
4
2
0
0.0
0.2
0.4
0.6
0.8
0
0.0
1.0
0.2
0.14
0.12
0.10
0.08
n = 0.5
model-1
model-2
model-3
model-4
0.04
0.02
0.00
0.0
0.2
0.4
0.6
0.8
1.0
0.8
1.0
(n=1.0 Side force)
Side force / Weight : Fy / Fz [N]
Side force / Weight : Fy / Fz [N]
(n=0.5 Side force)
0.06
0.4
Slip ratio
Slip ratio
0.6
0.8
1.0
0.25
0.20
0.15
0.10
n = 1.0
model-1
model-2
model-3
model-4
0.05
0.00
0.0
Slip ratio
0.2
0.4
0.6
Slip ratio
(n=0.5 Side force coefficient)
(n=1.0 Side force coefficient)
図 3.23: Comparison of normal stress models (slip ratio s - side forceFy ,side force
coefficientFy /Fz )
であるから,サイドフォースの大きさも σ(θ) の分布の大きさによって決定される.ゆ
えに,n = 1.0のケースにおいてすべり率が小さい領域では,model-4によって得られた
サイドフォースの方が大きくなると考えられる.
一方,垂直抗力によってサイドフォースを無次元化すると,どのモデルにおいても得
られる結果がほぼ同じである.これは駆動力係数の傾向と同様であり原因も垂直抗力の
違いにあると言っていよい.
また定量的な評価をおこなうと,model-4によって得られたすべり率-サイドフォース
曲線は,実験によって得られる曲線とよく一致していることがわかる(第4章参照).
本研究において用いる垂直応力モデル
以上の検討結果をふまえると,model-4を用いるのが最も適していると考えられる.
前述のようにmodel-4の利点は,
「kc ,kφ が未知(あるいは不均一)である土壌に対して,
n さえ分かれば垂直応力分布を的確にモデル化することが可能となる」という点である.
未知の土壌において,オンラインで駆動力やサイドフォースを求める必要性がある場合
- 56 -
3.5 数値シミュレーション
図 3.24: Slip ratio s · slip angle β - drawbar pull Fx
に非常に有効な垂直応力モデルである.
3.5.3
すべり率・スリップ角 ー 駆動力曲線
図3.24にすべり率・スリップ角 ー 駆動力の計算結果を示す.このグラフより,
• すべり率の増加に伴って駆動力も増加する.
• スリップ角の増加に伴い,駆動力は減少する.
という傾向が分かる.
3.5.4
すべり率・スリップ角 ー サイドフォース曲線
図3.25にすべり率・スリップ角 ー サイドフォースの計算結果を示す.このグラフより,
• すべり率の増加に伴ってサイドフォースも減少する.
• スリップ角の増加に伴い,サイドフォースは増加する.
という傾向が分かる.
- 57 -
第3 章
不整地におけるステアリング特性と車輪力学モデル
図 3.25: Slip ratio s · slip angle β - side force Fy
3.5.5
駆動力曲線 ー サイドフォース曲線
図3.26に駆動力とサイドフォースの関係を図示した.これは,すべり率,スリップ角
を任意に変化させ,網羅的に駆動力とサイドフォースの計算をおこなった結果である.
図3.26においてグラフ右方向へいくに従ってすべり率が増加し,グラフ上方向にいくに
従ってスリップ角が増加する.
ここで図3.26下部のグラフに注目すると,このグラフはスリップ角が一定の8 [deg]で
走行している車輪の駆動力とサイドフォースの関係を意味する.このとき,グラフの赤
い線と黒い線との交点,例えばA点は車輪がすべり率 0.2・スリップ角8 [deg]のときに生
じる駆動力およびサイドフォースからプロットされる.同様に,B点はすべり率 0.3・ス
リップ角8 [deg]のときはときに生じる駆動力およびサイドフォースからプロットされ,
A点とは異なる力を発生することが分かる.ここでCの領域に注目するとすべり率0.6か
ら0.9付近において,サイドフォースが急激に減少していることが分かる.このサイド
フォースの急激な減少によってコーナリングフォースも減少してしまい,車体の遠心力
とのバランスが崩れると考えられる.つまりCの領域において車輪のステアリング特性
に変化が生じてしまう,クリティカルな走行状態であるということが分かる.
このようなグラフを用いることによってステアリング特性を解析することが可能であ
るとともに,ある大きさの駆動力が発生している車輪が最大でどの程度のサイドフォー
スを発揮できるかということを評価することも可能である.
- 58 -
3.5 数値シミュレーション
Fy : Side force [N]
20
slip ratio
= 0.2
16 [deg]
12 [deg]
0.3
15
0.4
0.5
8 [deg]
10
0.6
slip angle = 4 [deg] 5
0.7
0.8
0.9
5
10
15
Fx : Drawbar pull [N]
Fy : Side force [N]
20
slip ratio
= 0.2
15
0.3
0.4
8 [deg]
10
0.5
A
0.6
B
0.7
slip angle = 4 [deg] 5
0.8
0.9
5
10
Fx : Drawbar pull [N]
図 3.26: Drawbar pull Fx - Side force Fy
- 59 -
15
C
第 4章
月模擬砂を用いた車輪走行実験
4.1
はじめに
第3章において提案した車輪力学モデルおよびその数値計算から,駆動力やサイドフォー
スの走行状態に対する傾向が明らかとなった.そこで本章では,本研究において提案し
た車輪力学モデルの整合性を確認するため,車輪走行実験装置を用いた実験について述
べる.走行する土壌には,月土壌模擬砂「月レゴリスシミュラント」と呼ばれる非常に
細かい砂を用いた.
まず本実験に用いる装置の概要について示し,次に3.4.2節において紹介したHegedus
の排土抵抗推定法の実証実験をおこない,過渡状態および定常状態の特性について考察
をおこなう.さらに車輪走行実験によって駆動力,サイドフォースおよびセルフアライ
ニングトルクの計測をおこない,数値計算結果と実験結果の比較から車輪モデルの整合
性を確認する.特にセルフアライニングトルクの計測結果に関して,そこから得られる
知見をもとにセルフアライニングトルクの車輪モデルを構築する.最後に実験に用いる
車輪表面の形状を変化させ,実験結果の相違点から力学的な傾向について言及する.
4.2
車輪走行実験装置概要
Hegedusの排土抵抗推定法の実証実験および車輪走行実験に用いた実験装置を紹介す
る.実験装置の概観および概念図を図4.1に,仕様を表4.1示す.本実験装置筐体部分は
全長1300 [mm],全幅600 [mm],高さ450 [mm]の直方体形状であり,実験装置上部に
取り付けられた全長1500 [mm]のスライドガイド上をプレートがベルトコンベア方式に
よって動かされる.この動きによって車輪の移動速度を表現する.さらにこのプレート
下部に取り付けられた2本の上下方向のスライドガイドと車輪を連結することによって,
- 61 -
第4 章
月模擬砂を用いた車輪走行実験
表 4.1: Specification of the single wheel test bed
寸法
1500 × 600 × 450 [mm]
力測定
6軸 F/tセンサ
沈下量
直動ポテンショメータ
車輪移動速度
搬送システム内エンコーダで測定
車輪角速度
車輪駆動モータのエンコーダで測定
実験車輪
半径:0.092 [m],幅:0.107 [m]
対象土壌
月土壌シミュラント
搬送方式
ベルトコンベア方式
車輪のz軸方向に自由な変位をもつことが可能となる.車輪の上部には,F/tセンサとリ
ニアポテンショメータを取り付けることによって,車輪に発生する6軸の力と車輪の沈
下量を測定することができる.
4.2.1
システム構成
本実験装置は,LaptopPCにて操作をおこなう.図4.2に実験装置のシステムブロック
図を示す.
本システムは,まずはじめにLaptopPCからモータコントローラに各モータの速度制
御の目標値を入力する.このとき入力する目標値は,目標すべり率から算出される車輪
移動速度および車輪回転速度である.モータ電源が投入されると,モータコントロー
ラ内においてモータエンコーダからの状態量をもとにPID制御を1 [ms]周期でおこなう
とともにLaptopPCへ各状態量を送信を開始する.LaptopPCでのエンコーダのサンプ
リングタイムは100 [ms]である.またA/D変換回路によって得られる沈下量のデータを
LaptopPCに送信する.モータコントローラはiXs Research 社製のiMCs01,モータドラ
イバは同社製のiMDs03を用いた(表4.2).F/tセンサは,ATI社製6軸力覚センサ(Gamma
SI-130-10,表4.3)を使用し,サンプリングタイムは100 [ms]とした.
搬送用モータおよび走行用モータの仕様を表4.4に記す.
4.2.2
実験車輪
実験に用いた車輪を図4.3に示す.本実験では2種類の車輪を用い,まず車輪表面が平
滑な車輪A(図4.3-(a))によって車輪モデルの整合性を確認する.また車輪表面に板状の
「パドル」を複数枚持つ車輪B(図4.3-(b))を用いた走行実験をおこなうことにより,車輪
- 62 -
4.2 車輪走行実験装置概要
F/t sensor amp
Convey motor
Slide guides
Plate
Laptop PC
z
y
Power supply
x
Soil
Motor controllers
Wheel
(Overview of the single wheel test bed)
Motor for conveyance
Plate
Linear
potentiometer
Slide guides
F/T Sensor
Wheel
Soil
(Schematic view of the single wheel test bed)
図 4.1: Single wheel test bed
- 63 -
第4 章
月模擬砂を用いた車輪走行実験
Convey encoder
Linear
potentiometer
Convey motor
A/D Converter
Laptop PC
F/T Sensor
USB
Motor Driver
Motor
controllers
Motor Driver
12V , 16V
Power
supply
Wheel motor
Wheel encoder
図 4.2: System diagram of the single wheel test bed
表 4.2: Specification of Motor controller and Motor Driver
Motor controller : iMCs01
CPU
HD-64F3067RF-20 (20MHz)
電源電圧
5 [V] ± 5% (USBバスパワー可)
通信速度
USB1.1 12Mbps (Full speed)
出力信号
PWM (20kHz),BRK/DA,CW/CCW
入力信号
AD (10bit),A相・B相 (2相エンコーダ用)
寸法
45 [mm] × 30 [mm] (2層基板)
重量
約18 [g]
Motor Driver : iMDs03
付加電圧
15 [V] ∼ 24 [V]
定格電流
7 [A]
入力信号
PWM (正論理),BRK,CW/CCW
寸法
45 [mm] × 30 [mm] (2層基板)
重量
約18 [g]
- 64 -
4.2 車輪走行実験装置概要
表 4.3: Specification of F/t sensor
定格
Fx ,Fy [N]
Fz [N]
τx ,τy ,τz [Nm]
130
400
10
分解能
Fx ,Fy [±N] Fz [±N] τx ,τy ,τz [±Nm]
1/160
1/80
1/3200
表 4.4: Specification of convey motor and wheel motor
搬送用モータ
走行用モータ
製品
MAXSON社製 DC-MOTOR RE25
MAXSON社製 DC-MOTOR RE-max29
出力[W]
20
22
定格電圧[V]
18
24
ギア比
1181:1
411:1
エンコーダ[pulse/r]
180
500
Aとの比較および車輪モデルが車輪Bにも適合するかどうかについて考察することがで
きる.車輪形状に関する検討は4.5節において議論する.
4.2.3
実験土壌:月土壌レゴリスシミュラント
本研究では月面上での走行を模擬するため,月の砂に非常に似通った性質を持つ「月
土壌レゴリスシミュラント」を用いて各種の実験をおこなった.
月表面の土壌はアポロ計画時の飛行士からの報告によると,月表面を歩き回る際に周
囲に塵が舞い上がるほどの細かいパウダー上の粒子で,踏み込んだ部分にはくっきりと
足跡が残るほどの凝着力があると報告されている(図4.4参照).
月土壌シミュラントは,玄武岩質溶岩を材料とし破砕による粒度分布模擬,混合比の
選定,機械的性質試験を繰り返して製造される.また,粒径・比重および内部摩擦角と
いった機械的性質が模擬されており,加えて化学組成に関しても概略模擬がなされてい
る.日本において製造されている月模擬砂の代表的なものに「FJS-1」と「MKS-1」が
ある.アポロ計画時に採集された実際の月レゴリスとの機械的性質における比較を表4.5
に示す.本実験では,清水建設製月土壌シミュラントFJS-1[30]を使用した.
- 65 -
第4 章
月模擬砂を用いた車輪走行実験
(a) Wheel A : w/o Paddle
(b) Wheel B : w/ Paddle
図 4.3: Experimantal wheels
c
図 4.4: Regolith of the moon NASA
表 4.5: Comparison about mechanical properties of the Lunar soil
土壌
密度 [g/cm3 ]
平均粒径
粒子比重
粘着力
内部摩擦角
[kPa]
[deg]
最小
最大
[µ m]
月レゴリス
1.45
1.79
70
3.1
0.1-1
30-50
FJS-1
1.40
2.00
70
2.94
0-8
37.2
MKS-1
1.39
1.87
50
2.83
0-8
36.7
- 66 -
4.3 Hegedusの排土抵抗推定法の実証実験
Motor for conveyance
F/T Sensor
Bulldozing Blade
図 4.5: Test bed for Hegedus’s Bulldozing resistance estimation
Hegedusの排土抵抗推定法の実証実験
4.3
本実証実験では排土抵抗の計測とともに,排土抵抗の値に速度依存性があるかどうか
を確認する.ブルドーザーのように土壌を押しのける場合,ブルドーザーのブレード前
方において土壌の圧縮や盛り上がった土壌の崩壊などが考えられる.このような現象に
関してブレードが土壌を押しのける速度との依存性があるかどうかについて,排土抵抗
の過渡状態に注目した考察もおこなう.
4.3.1
実験手順
本実験の概観を図4.5に示す.図4.1に示した実験装置において,車輪の代わりに十分
な厚さを持ったアルミ製のブレードを取り付け,土壌への沈下量を任意に変更できるよ
うにした.
実験条件は以下のとおりである.
• ブレード並進速度・
・
・すべり率換算で0から0.8(0.007 ∼ 0.034 [m/s])まで0.2刻み
→ 5パターン
• ブレード沈下量・
・
・10 [mm]から30 [mm]まで10[mm]刻み → 3パターン
計測された力データをもとに,次に示すようなグラフを作成し考察をおこなう.
• 沈下量 - Rb [N/m]・
・
・排土抵抗推定法の確認のため
• 並進速度 - Rb × b(ブレード幅) [N]・
・
・速度依存性の確認のため
- 67 -
第4 章
4.3.2
月模擬砂を用いた車輪走行実験
実験結果
排土抵抗は次式で定義されている.
1
Rb = D1 (h · c + ρh2 D2 )
2
つまり沈下量 h の二次関数になっていることを確認したい.
(3.48)
実験結果を以下のように示す.
• 沈下量 - Rb [N/m]・
・
・図4.6
・
・図4.7-(b)
• 並進速度 - Rb × b(ブレード幅) [N]・
図4.6より,二次線形近似をおこなったところ表4.6に示すように R2 値がほぼ1に近い値
を持つことが分かり,排土抵抗は沈下量に二乗比例すること確認された.なお表中の
K1 ,K2 ,K3 は多項式近似,
y = K1 x2 + K2 x + K3
の係数である.
表 4.6: Result of 2nd-order polynomial approximation
slip
v [m/s] K1 [105 N/m]
K2 [102 N/m]
K3 [N/m]
R2
0.0
0.034
3.76
-4.37
1.76
0.9990
0.2
0.027
3.94
-6.49
1.59
0.9993
0.4
0.020
4.20
-1.02
1.65
0.9993
0.6
0.014
3.59
2.10
0.25
0.9999
0.8
0.007
3.98
-7.57
1.94
0.9989
本グラフより未解決であったXc などの各パラメータを推定できる.その結果Bekker
によって理論付けられていた式(3.44)によって算出される値,
37.2
φ
= 45 −
2
2
= 26.4 [deg]
Xc = 45 −
(4.1)
が適合することが確認された.また沈下量の二乗比例に関して,参考文献[32]において
も相似則を用いて排土抵抗が長さ(沈下量)の二乗に比例していることを示している.
図4.7より,定常状態であれば排土抵抗の移動速度依存性は無いと言える.しかしなが
ら過渡状態においては速度依存が顕著であった.つまり,
「過渡状態(ステアリング開始時)
- 68 -
4.3 Hegedusの排土抵抗推定法の実証実験
300
400
Bulldozing resistance [N/m]
Bulldozing resistance [N/m]
400
v = 0.034 [m/s]
Experiment
Polynomial approximation (2nd-order)
200
100
0
0.0
0.5
1.0
1.5
2.0
2.5
v = 0.027 [m/s]
Experiment
Polynomial approximation (2nd-order)
300
200
100
0
0.0
-2
3.0x10
0.5
1.0
sinkage [m]
Bulldozing resistance [N/m]
Bulldozing resistance [N/m]
100
0.5
1.0
1.5
2.0
2.5
v = 0.014 [m/s]
Experiment
Polynomial approximation (2nd-order)
300
200
100
0
0.0
-2
3.0x10
0.5
1.0
sinkage [m]
2.0
-2
2.5
3.0x10
2.5
3.0x10
v = 0.014 [m/s]
Bulldozing resistance [N/m]
400
Bulldozing resistance [N/m]
1.5
sinkage [m]
v = 0.020 [m/s]
v = 0.007 [m/s]
Experiment
Polynomial approximation (2nd-order)
200
100
0
0.0
-2
3.0x10
400
v = 0.020 [m/s]
Experiment
Polynomial approximation (2nd-order)
200
300
2.5
v = 0.027 [m/s]
400
0
0.0
2.0
sinkage [m]
v = 0.034 [m/s]
300
1.5
400
v = 0.007 [m/s]
v = 0.014 [m/s]
v = 0.020 [m/s]
v = 0.027 [m/s]
v = 0.034 [m/s]
Theory
300
200
100
0
0.5
1.0
1.5
2.0
2.5
-2
3.0x10
0.0
0.5
sinkage [m]
1.0
1.5
2.0
sinkage [m]
v = 0.007 [m/s]
Experiments vs. Theory
図 4.6: Results of Hegedus’s Bulldozing resistance estimation (1)
(Sinkage - Bulldozing resistance)
- 69 -
-2
月模擬砂を用いた車輪走行実験
Rb : Bulldozing froce [N]
第4 章
14
h=10[mm]
h=20[mm]
h=30[mm]
12
10
8
6
4
2
0
0.00
0.01
0.02
0.03
0.04
velocity [m/s]
図 4.7: Results of Hegedus’s Bulldozing resistance estimation (2)
(Velocity - Bulldozing force)
と定常状態(ステアリング中)において排土抵抗の式が異なる」と考えられる.実験から
得られた時間と力のプロファイルを見ると,一次遅れ系(指数関数)によって過渡状態・
過渡特性の表現が可能ではないかと推察される.これらについて考察をさらに加える.
4.3.3
過渡状態および定常状態における速度依存性
過渡状態の速度依存性に関して,一次遅れ系によって表現できると考えた.よって一
次遅れ系の一般的な式として以下の式を用い過渡状態を扱うこととする.
y = y0 + A · e−Bx
(4.2)
ここで 1/B は時定数となり,また y0 は排土抵抗の定常値となる.実験より得られたそ
れぞれの結果に対して式(4.2)を適用し,y0 ,A,B をIGORの解析ツールによって求め
た.解析結果を図4.8,および得られた各パラメータを表4.7に示す.
図4.8より,全ての実験結果について一次遅れ系での表現が可能であるということが確
認できる.さらに表4.7を詳しく見ていくと,以下のことが確認できる.
まずそれぞれの沈下量において,y0 がすべり率(移動速度)によらずほぼ一定である.y0
は排土抵抗の定常値そのものであり,定常値は速度依存性が無いということを意味する.
次に 1/B は一次遅れ系の時定数である.この数値に関して考察を加えると,沈下量が
小さく移動速度がある程度大きい状態(h=20 [mm],slip=0.0 ∼ 0.4など)では時定数はほ
ぼ一定である.しかしながら,沈下量が30 [mm]のケースでは時定数は明らかに速度依
存のパラメータとなっている.そこで図4.9にすべり率と時定数の関係をプロットした.
この図によると時定数はすべり率の2次比例関係として表現されることを示唆している.
- 70 -
4.3 Hegedusの排土抵抗推定法の実証実験
表 4.7: Parameters on 1st-order delay system of Bulldozing force
(a) 沈下量h=10 [mm]
slip
v [m/s]
y0 [N]
A [N]
B [1/s]
1/B [s]
0.0
0.034
1.38
-0.62
0.46
2.17
0.2
0.027
1.37
-0.55
0.50
2.00
0.4
0.020
1.30
-0.47
0.66
1.52
0.6
0.014
1.26
-0.47
0.46
2.17
0.8
0.007
1.35
-0.59
0.11
9.09
(b) 沈下量h=20 [mm]
slip
v [m/s]
y0 [N]
A [N]
B [1/s]
1/B [s]
0.0
0.034
4.50
-2.15
0.51
1.96
0.2
0.027
4.55
-1.67
0.55
1.82
0.4
0.020
4.54
-2.13
0.52
1.92
0.6
0.014
4.64
-1.68
0.29
3.45
0.8
0.007
4.58
-2.39
0.15
6.67
(c) 沈下量h=30 [mm]
slip
v [m/s]
y0 [N]
A [N]
B [1/s]
1/B [s]
0.0
0.034
10.00
-5.99
0.77
1.30
0.2
0.027
10.60
-4.80
0.47
2.13
0.4
0.020
10.82
-7.15
0.36
2.78
0.6
0.014
10.16
-6.16
0.19
5.26
0.8
0.007
10.58
-6.87
0.14
7.14
- 71 -
第4 章
月模擬砂を用いた車輪走行実験
1.2
1.0
0.8
Slip 0.0 (v=34[mm/s])
Experiment
1st-order delay system
0.6
4
3
Slip 0.0 (v=34[mm/s])
Experiment
1st-order delay system
2
Bulldozing force [N]
5
1.4
Bulldozing force [N]
Bulldozing force [N]
1.6
10
8
6
Slip 0.0 (v=34[mm/s])
Experiment
1st-order delay system
4
0.4
0
20
40
60
0
80
20
40
2
60
80
0
20
40
2
time x10 [ms]
60
80
100
2
time x10 [ms]
time x10 [ms]
1.2
1.0
0.8
Slip 0.2 (v=27[mm/s])
Experiment
1st-order delay system
0.6
4
3
Slip 0.2 (v=27[mm/s])
Experiment
1st-order delay system
2
Bulldozing force [N]
5
1.4
Bulldozing force [N]
Bulldozing force [N]
1.6
10
8
6
Slip 0.2 (v=27[mm/s])
Experiment
1st-order delay system
4
0.4
0
20
40
60
80
100
0
40
2
80
120
0
40
2
time x10 [ms]
80
120
2
time x10 [ms]
time x10 [ms]
1.2
1.0
0.8
Slip 0.4 (v=20[mm/s])
Experiment
1st-order delay system
0.6
4
3
Slip 0.4 (v=20[mm/s])
Experiment
1st-order delay system
2
Bulldozing force [N]
5
1.4
Bulldozing force [N]
Bulldozing force [N]
1.6
10
8
6
Slip 0.4 (v=20[mm/s])
Experiment
1st-order delay system
4
0.4
0
40
80
120
0
20
40
2
60
80
0
100 120
50
100
150
200
2
2
time x10 [ms]
time x10 [ms]
time x10 [ms]
1.2
1.0
0.8
Slip 0.6 (v=14[mm/s])
Experiment
1st-order delay system
0.6
4
3
Slip 0.6 (v=14[mm/s])
Experiment
1st-order delay system
2
Bulldozing force [N]
5
1.4
Bulldozing force [N]
Bulldozing force [N]
1.6
10
8
6
Slip 0.6 (v=14[mm/s])
Experiment
1st-order delay system
4
0.4
0
50
100
150
200
0
50
2
100
150
200
0
50
2
time x10 [ms]
100
150
200
250
2
time x10 [ms]
time x10 [ms]
1.2
1.0
0.8
Slip 0.8 (v=7[mm/s])
Experiment
1st-order delay system
0.6
4
3
Slip 0.8 (v=7[mm/s])
Experiment
1st-order delay system
2
Bulldozing force [N]
5
1.4
Bulldozing force [N]
Bulldozing force [N]
1.6
10
8
6
Slip 0.8 (v=7[mm/s])
Experiment
1st-order delay system
4
0.4
0
100
200
300
400
2
time x10 [ms]
h=10 [mm]のケース
0
100
200
300
400
2
time x10 [ms]
h=20 [mm]のケース
0
100
200
300
400
h=30 [mm]のケース
図 4.8: Approximation of Bulldozing force by 1st-order delay system
- 72 -
500
2
time x10 [ms]
4.3 Hegedusの排土抵抗推定法の実証実験
Decay time constant [s]
10
h = 10[mm]
h = 20[mm]
h = 30[mm]
8
6
4
2
0
0.0
0.2
0.4
0.6
0.8
slip ratio
図 4.9: Relationship between slip ratio and decay time-constant
Moving distance [m]
0.14
h = 10[mm]
h = 20[mm]
h = 30[mm]
0.12
0.10
0.08
0.06
0.04
0.02
0.00
0.0
0.2
0.4
0.6
0.8
slip ratio
図 4.10: Relationship between slip ratio and bulldozing distance
- 73 -
第4 章
月模擬砂を用いた車輪走行実験
図4.10にすべり率と移動距離の関係を示した.ここでの移動距離 L は速度と時定数か
ら算出されるものとし L = v/B と定義した.つまり時定数に達するまでにブレードが
移動した距離が L である.
図より移動距離はすべり率に依存せずほぼ一定の値(0.03∼0.08 [m])を示した.これは
定常状態の63%に達するまでにどの程度移動したかを意味する.言い換えると定常状態ま
でにどのくらいの土壌を押しのけたか,ということを示唆するものであると同時に,ど
の程度の量の土壌を押しのければ(圧縮すれば)定常状態になるか,ということでもある.
すなわち排土抵抗の定常状態とは,移動距離と押しのけた土壌の量によって決定され
るものであり,移動速度には依存しないということが示された.また,先ほど示した時
定数の逆数1/B は速度によるパラメータであることも同時に明らかとなる.
4.4
4.4.1
車輪走行実験
実験概要
車輪走行実験によって車輪に取り付けられたF/tセンサから計測される駆動力,サイ
ドフォースおよびセルフアライニングトルクと数値計算結果との比較をおこないモデル
の整合性を確認する.
本実験では,任意のすべり率,任意のスリップ角における車輪の力・トルクを計測し
た.実験条件は以下の通りである.
• すべり率・
・
・0から0.9まで0.1刻み → 10パターン
• スリップ角・
・
・0 [deg]から16 [deg]まで4 [deg]刻み → 5パターン
なお再現性を確認するために,各実験において最低2回の実験をおこなった.計測され
た力データをもとに,次に示すようなグラフを作成し考察をおこなう.
• すべり率 - Fx :駆動力
• すべり率 - Fx /Fz :駆動力係数
• すべり率 - Fy :サイドフォース
• すべり率 - Fy /Fz :サイドフォース係数
• Fx - Fy :ステアリング特性
• Fx /Fz - Fy /Fz :ステアリング特性
• すべり率 - τz :セルフアライニングトルク
- 74 -
4.4 車輪走行実験
4.4.2
駆動力計測実験結果
実験によって計測されたグラフをそれぞれ以下のように示す.
• すべり率 - Fx :駆動力 . . . 図4.11
• すべり率 - Fx /Fz :駆動力係数 . . . 図4.12
それぞれのグラフ上に式(3.36)に基づいた数値計算によって得られた結果もプロットし
てある.
すべり率が小さい領域
グラフから得られる知見として,まず図4.11に注目すると,すべり率が小さい領域(0
から0.1程度)において駆動力が負の値をとってしまう.この原因として,すべり率が小
さい場合,土壌のせん断変位が小さいため車輪下部において発生するせん断応力も必然
的に小さくなる.式(3.36)に示すように,駆動力はせん断応力と垂直応力の水平成分の
差を積分することによって得られるため,せん断応力が垂直応力よりも小さい状態では
駆動力は負となってしまう.また軟弱地盤においてすべり率が小さい場合,装置上部の
動きに同期して車輪が動く,つまり車体の動きにつられるように車輪が動いているとも
考えられる.実際の現象例を考えると,車両が斜面をすべりながら降下する場合などが
これに当たると考えられる.
すべり率が中程度∼大きい領域
さらに同図において,すべり率が中程度の領域では駆動力はほぼ一定の値を示し,飽
和状態に達したと考えられる.これはせん断変形が飽和に達したためと考えられる.ま
たすべり率の大きい状態では,実験値の標準偏差が大きくなっていることが分かる.す
べり率0.9などは車体がほぼ動かない状態で,車輪が回転するため非常に不安定走行状態
であり,そのため比較的大きな偏差が発生してしまったと考えられる.
駆動力係数の示唆するもの
駆動力係数を示す図4.12に注目すると,これらのグラフが示す意味として,進む力を
垂直抗力で割っていることより,縦軸の駆動力係数とはいわゆる月土壌シミュラントの
車輪x方向に関する擬似的に摩擦係数を示すものと考えられる.この擬似摩擦係数の小
さい領域・すべり率の小さい領域では車輪の接地面積が小さいため摩擦係数も必然的に
小さくなる.さらに静摩擦・動摩擦という概念を用いると,すべり率0.6付近において駆
- 75 -
第4 章
月模擬砂を用いた車輪走行実験
動力係数が幾許か減少している.この傾向から推察すると,すべり率0.6以降ではそれま
で静止摩擦であったものが動摩擦現象の領域に入り,その結果としてすべり率の大きい
領域において実験値に比較的大きな偏差が発生したと推考される.
スリップ角との関連性
スリップ角と駆動力の関連性は第3章における数値計算と同様に,スリップ角の増加
に伴って駆動力は減少する傾向が実験からも現われ,本研究でモデル化した車輪力学の
駆動力に関する部分は整合性があると言える.
4.4.3
サイドフォース計測実験結果
実験によって計測されたグラフをそれぞれ以下のように示す.
• すべり率 - Fy :サイドフォース . . . 図4.13
• すべり率 - Fy /Fz :サイドフォース係数 . . . 図4.14
それぞれのグラフ上に式(3.39)等に基づいた数値計算によって得られた結果もプロット
してある.
すべり率との関連性
図4.13において,いずれのグラフからもすべり率の増加に伴ってサイドフォースが減少
している傾向が分かり,また数値計算の結果ともよく一致している.さらにスリップ角の
増加に伴ってサイドフォースも全体的に増加しており,第3章で述べたサイドフォースの
傾向を再現している.すべり率が小さい方がサイドフォースが大きくなる原因について考
える.車輪下部のせん断変形は車輪y方向の移動速度に依存し,すべり率0の状態が最も
y方向の速度が大きい.すなわちせん断変形も大きくなるため,特に Fu が最大となる.
またすべり率が大きくなるにしたがって,沈下量が増え Fs が増加するため比較的緩
やかにサイドフォースが減少し,サイドフォースが負値となるケースがある.これはお
そらく車輪下部において土壌が後方から見て右側へ排出されるため,車輪下の土壌が不
均一な高さとなり土壌平面に対して車輪が傾く,つまり擬似的にキャンバ角が生じてし
まうためではないかと考えられる.特にサイドフォースが小さくなるすべり率0.9付近に
おいてサイドフォースの負値がグラフから見て取れる.
- 76 -
20
Fx : Drawbar pull [N]
Fx : Drawbar pull [N]
4.4 車輪走行実験
15
10
5
0
-5
Slip angle = 0 [deg]
Experiment
Theory
-10
-15
0.0
0.2
0.4
0.6
0.8
20
15
10
5
0
-5
Slip angle = 4 [deg]
Experiment
Theory
-10
-15
0.0
1.0
0.2
0.4
Fx : Drawbar pull [N]
15
10
5
0
Slip angle = 8 [deg]
Experiment
Theory
-10
-15
0.0
0.2
0.4
0.8
1.0
(slip angle = 4[deg])
20
0.6
0.8
20
15
10
5
0
-5
Slip angle = 12 [deg]
Experiment
Theory
-10
-15
0.0
1.0
0.2
0.4
Slip ratio
0.6
0.8
Slip ratio
(slip angle = 8[deg])
Fx : Drawbar pull [N]
Fx : Drawbar pull [N]
(slip angle = 0[deg])
-5
0.6
Slip ratio
Slip ratio
(slip angle = 12[deg])
20
15
10
5
0
-5
Slip angle = 16 [deg]
Experiment
Theory
-10
-15
0.0
0.2
0.4
0.6
0.8
1.0
Slip ratio
(slip angle = 16[deg])
図 4.11: Experimental results:slip ratio - Fx :Drawbar Pull
- 77 -
1.0
月模擬砂を用いた車輪走行実験
Fx / Fz : Drawbar-pull / Weight
Fx / Fz : Drawbar-pull / Weight
第4 章
0.4
0.3
0.2
0.1
0.0
Slip angle = 0 [deg]
Experiment
Theory
-0.1
-0.2
0.0
0.2
0.4
0.6
0.8
0.4
0.3
0.2
0.1
Slip angle = 4 [deg]
Experiment
Theory
0.0
-0.1
1.0
0.0
0.2
Slip ratio
Fx / Fz : Drawbar-pull / Weight
0.2
0.1
Slip angle = 8 [deg]
Experiment
Theory
0.2
0.4
1.0
0.6
0.8
0.4
0.3
0.2
0.1
Slip angle = 12 [deg]
Experiment
Theory
0.0
-0.1
1.0
0.0
0.2
Slip ratio
0.4
0.6
0.8
1.0
Slip ratio
(slip angle = 8[deg])
Fx / Fz : Drawbar-pull / Weight
Fx / Fz : Drawbar-pull / Weight
0.3
0.0
0.8
(slip angle = 4[deg])
0.4
-0.1
0.6
Slip ratio
(slip angle = 0[deg])
0.0
0.4
(slip angle = 12[deg])
0.4
0.3
0.2
0.1
Slip angle = 16 [deg]
Experiment
Theory
0.0
-0.1
0.0
0.2
0.4
0.6
0.8
1.0
Slip ratio
(slip angle = 16[deg])
図 4.12: Experimental results:slip ratio - Fx /Fz :Drawbar Pull coefficient
- 78 -
4.4 車輪走行実験
スリップ角との関連性
スリップ角とサイドフォースの関連性は第3章における数値計算と同様に,スリップ
角の増加に伴ってサイドフォースは増加する傾向が実験からも現われ,本研究でモデル
化した車輪力学のサイドフォースに関する部分も整合性があると言える.
以上より,本研究で提案したサイドフォースに関する車輪力学モデルの正当性が確認
できた.
サイドフォース係数の示唆するもの
サイドフォース係数を示す図4.14について駆動力係数と同様の推察をすると,グラフ縦
軸は車輪y方向の擬似的な摩擦係数を示唆するものと考えられる.この摩擦係数が大きい領
域・すべり率の小さい領域では車輪の接地面積が小さいがy軸方向の移動速度が大きいた
め摩擦係数が大きくなる.よって移動速度に依存して摩擦係数が減少すると考えられる.
4.4.4
駆動力 ー サイドフォース
実験によって計測されたグラフをそれぞれ以下のように示す.
• Fx - Fy :ステアリング特性(駆動力ーサイドフォースの関係性) . . . 図4.15
• Fx /Fz - Fy /Fz :駆動力係数とサイドフォース係数の関連性 . . . 図4.16
それぞれのグラフ上に数値計算によって得られた結果もプロットしてある.
ステアリング特性の考察
第3章に述べたように,図4.15の各グラフにおいてサイドフォースの急激な減少が見
られる.このサイドフォースの急激な減少によってコーナリングフォースも減少してし
まい,車体の遠心力とのバランスが崩れるという第3章においておこなった考察も裏付
けられた.この減少の割合はスリップ角が大きくなるほど顕著であり,より不安定な走
行状態へと遷移すると考えられる.図4.15は本実験に用いた車輪と月レゴリスシミュラ
ントとの関係から一意に決定されるもので,その関係性におけるステアリング特性を示
すのが図4.15 である.
駆動力係数とサイドフォース係数の関連性
図4.16は先に述べたように,それぞれの擬似的な摩擦係数を示唆するもの同士を比較し
たものである.このグラフは自動車タイヤの場合,
「タイヤの摩擦円」と呼ばれ垂直抗力
- 79 -
第4 章
月模擬砂を用いた車輪走行実験
30
Fy : Side force [N]
Fy : Side force [N]
30
Slip angle = 0 [deg]
Experiment
Theory
25
20
15
10
5
0
-5
0.0
0.2
0.4
0.6
0.8
Slip angle = 4 [deg]
Experiment
Theory
25
20
15
10
5
0
-5
0.0
1.0
0.2
0.4
Slip ratio
(slip angle = 0[deg])
1.0
Fy : Side force [N]
30
Slip angle = 8 [deg]
Experiment
Theory
25
20
15
10
5
0
0.2
0.4
0.6
0.8
Slip angle = 12 [deg]
Experiment
Theory
25
20
15
10
5
0
-5
0.0
1.0
0.2
0.4
Slip ratio
0.6
0.8
Slip ratio
(slip angle = 8[deg])
(slip angle = 12[deg])
30
Fy : Side force [N]
Fy : Side force [N]
0.8
(slip angle = 4[deg])
30
-5
0.0
0.6
Slip ratio
Slip angle = 16 [deg]
Experiment
Theory
25
20
15
10
5
0
-5
0.0
0.2
0.4
0.6
0.8
1.0
Slip ratio
(slip angle = 16[deg])
図 4.13: Experimental results:slip ratio - Fy :Side force
- 80 -
1.0
0.4
Slip angle = 0 [deg]
Experiment
Theory
0.3
0.2
0.1
0.0
-0.1
0.0
0.2
0.4
0.6
0.8
0.4
Fy / Fz : Side force / Weight
Fy / Fz : Side force / Weight
4.4 車輪走行実験
Slip angle = 4 [deg]
Experiment
Theory
0.3
0.2
0.1
0.0
-0.1
1.0
0.0
0.2
Slip ratio
-0.1
0.2
0.4
1.0
0.6
0.8
0.4
Fy / Fz : Side force / Weight
0.0
Slip angle = 12 [deg]
Experiment
Theory
0.3
0.2
0.1
0.0
-0.1
1.0
0.0
0.2
Slip ratio
0.4
0.6
0.8
1.0
Slip ratio
(slip angle = 8[deg])
Fy / Fz : Side force / Weight
Fy / Fz : Side force / Weight
Slip angle = 8 [deg]
Experiment
Theory
0.1
0.0
0.8
(slip angle = 4[deg])
0.4
0.2
0.6
Slip ratio
(slip angle = 0[deg])
0.3
0.4
(slip angle = 12[deg])
0.4
Slip angle = 16 [deg]
Experiment
Theory
0.3
0.2
0.1
0.0
-0.1
0.0
0.2
0.4
0.6
0.8
1.0
Slip ratio
(slip angle = 16[deg])
図 4.14: Experimental results:slip ratio - Fy /Fz :Side force coefficient
- 81 -
第4 章
月模擬砂を用いた車輪走行実験
30
Fy : Side force [N]
Fy : Side force [N]
30
Slip angle = 4 [deg]
Experiment
Theory
25
20
15
10
5
0
20
15
10
5
0
0
5
10
15
20
0
5
10
15
Fx : Drawbar pull [N]
Fx : Drawbar pull [N]
(slip angle = 4[deg])
(slip angle = 8[deg])
30
20
30
Fy : Side force [N]
Fy : Side force [N]
Slip angle = 8 [deg]
Experiment
Theory
25
Slip angle = 12 [deg]
Experiment
Theory
25
20
15
10
5
0
Slip angle = 16 [deg]
Experiment
Theory
25
20
15
10
5
0
0
5
10
15
20
0
Fx : Drawbar pull [N]
5
10
15
20
Fx : Drawbar pull [N]
(slip angle = 12[deg])
(slip angle = 16[deg])
図 4.15: Experimental results:Fx :Drawbar Pull - Fy :Side force
(接地荷重)に対して車輪にどの程度の力が加わるかを議論するうえで重要なものである.
本グラフに示すように軟弱地盤上の剛性車輪においても同様の摩擦円を見ることがで
き,車輪において生じる力あるいは摩擦力の限界値を議論することができる.ただし車
輪の非線形要素を考慮すると一概に摩擦係数だけで考察を行なうことはできないが,概
念的な評価,たとえばサイドフォースを大きくしたい場合は駆動力を小さくする必要が
ある,といった知見を得ることができる.
4.4.5
セルフアライニングトルク計測実験と力学モデル
実験結果
実験によって計測されたグラフを図4.17に示す.
セルフアライニングトルクは,一般に式(3.2),図3.2に示すように,車輪の復元方向
へと働くトルクである.しかしながら不整地上を走行する剛性車輪では,このセルフア
ライニングトルクはスリップ角を小さくする復元方向ではなく,むしろz軸正回転方向
に発生するということが実験結果より分かった.サイドフォースのベクトルを考慮する
- 82 -
0.4
Fy / Fz : Side force / Weight
Fy / Fz : Side force / Weight
4.4 車輪走行実験
Slip angle = 4 [deg]
Experiment
Theory
0.3
0.2
0.1
0.0
0.0
0.1
0.2
0.3
0.4
0.4
Slip angle = 8 [deg]
Experiment
Theory
0.3
0.2
0.1
0.0
0.0
0.4
Slip angle = 12 [deg]
Experiment
Theory
0.2
0.1
0.0
0.0
0.1
0.2
0.3
0.2
0.3
0.4
(slip angle = 8[deg])
Fy / Fz : Side force / Weight
Fy / Fz : Side force / Weight
(slip angle = 4[deg])
0.3
0.1
Fx / Fz : Drawbar-pull / Weight
Fx / Fz : Drawbar-pull / Weight
0.4
0.2
0.1
0.0
0.0
0.4
Slip angle = 16 [deg]
Experiment
Theory
0.3
0.1
0.2
0.3
Fx / Fz : Drawbar-pull / Weight
Fx / Fz : Drawbar-pull / Weight
(slip angle = 12[deg])
(slip angle = 16[deg])
0.4
図 4.16: Experimental results:Fx /Fz :Drawbar Pull coefficient - Fy /Fz :Side force
coefficient
- 83 -
: Self-aligning torque [Nm]
月模擬砂を用いた車輪走行実験
0.6
0.4
0.2
0.0
0.6
0.4
0.2
0.0
τz
τz
: Self-aligning torque [Nm]
第4 章
0.0
0.2
0.4
0.6
0.8
1.0
0.0
0.2
Slip ratio
0.6
0.8
1.0
Slip ratio
(slip angle = 4[deg])
: Self-aligning torque [Nm]
(slip angle = 0[deg])
0.6
0.4
0.2
0.6
0.4
0.2
0.0
τz
0.0
τz
: Self-aligning torque [Nm]
0.4
0.0
0.2
0.4
0.6
0.8
1.0
0.0
0.2
Slip ratio
0.6
0.8
Slip ratio
(slip angle = 8[deg])
(slip angle = 12[deg])
0.6
0.4
0.2
0.0
τz
: Self-aligning torque [Nm]
0.4
0.0
0.2
0.4
0.6
0.8
1.0
Slip ratio
(slip angle = 16[deg])
図 4.17: Experimental results:slip ratio - τz :Self-aligning torque
- 84 -
1.0
4.4 車輪走行実験
x
traveling direction
slip angle : β
Fx
tr
Fy
τz : Self-aligning torque
y
図 4.18: Self-aligning torque of rigid wheel on loose soil
と,サイドフォースの発生点は図3.2に示すように車輪後方ではなく図4.18に示すように
車輪前方に力の発生点があると考えられる.
このようになる原因として,自動車のタイヤ(ゴムタイヤ)の場合,タイヤのトレッド
センターの横変位は,トレッド部分の横変形とサイドウォールの弾性変形とが加わった
ものである.タイヤ接地面においてタイヤ前方では横に引っ張る摩擦力よりもタイヤの
弾性力が小さいため,タイヤが弾性変形をする.この領域を粘着域という.一方タイヤ
後方ではタイヤの弾性力が勝り横滑りをする.高速コーナリングでタイヤが鳴く現象は,
タイヤ後方において横滑りをしているためである.この領域をすべり域という.
実験に用いた剛性車輪では車輪の弾性変形が起こりえない.つまり車輪前方において
摩擦力よりも車輪剛性の方が十分大きいため横滑りを起こし,サイドフォースの発生点
は車輪の前方に存在してしまうと考えられる.この車輪中心からサイドフォース発生位
置までの距離(トレール距離)を tr とし,この距離の推定をおこなう.
セルフアライニングトルクの定式化・tr の推定
距離 tr を図4.19に示すように車輪の接地角度に換算すると,この角度は最大応力発生
角 θm に相当するのではないかと推測されるとともに,力の発生点は最も応力が集中し
ているところであると推定する.この推定に基づくと,
tr = r sin θm
(4.3)
となり,さらに図4.19に基づくとセルフアライニングトルクは,
τz = Fy × tr
= Fy × r sin θm
によって成立すると考えられる.
- 85 -
(4.4)
第4 章
月模擬砂を用いた車輪走行実験
Z
θm
X
Fx
σ(θ)
τ(θ)
y
Fy
X
Fx
τz : Self-aligning torque
tr
図 4.19: Estimation of originating point of wheel forces
数値計算と実験結果の比較およびモデルの確認
この理論に基づいて式(4.4)を用い,数値シミュレーションをおこなった.この結果を
図4.20に示す.
実験値と推定値を比較すると概ね一致しているように見えるが,スリップ角が4 [deg]
の時にある程度の誤差が見られる.しかしながらサイドフォースとz軸周りの計測トル
クの計測誤差を考慮すると,この誤差(0.1-0.2 [Nm])程度は許容できると思われる.
すべり率の小さい領域において,しかし0ではなく0.2付近においてセルフアライニング
トルクは最大値を取ることが図4.20からわかる.すべり率0.2付近で最大となる理由とし
て,まずサイドフォースそのものはすべり率0において最大値をとるが,トレール距離 tr
が短いためセルフアライニングトルクが最大とはならない.トレール距離を決定づける
ファクタは θm であるが,この θm は式(3.19)に示すようにすべり率の関数となっている
ため,すべり率が小さいときはトレール距離 tr が小さくなってしまうのは必然である.
一方,すべり率の大きい領域に注目すると,セルフアライニングトルクが小さくなっ
ている.すべり率が大きい場合は車輪のスリップ角を増やす方向へのトルクは小さく
なっており,これはおそらく車輪が土壌に沈むために左右の土壌によって押さえつけら
れているためと考えられる.またすべり率が大きい領域ではトレール距離は大きくなる
が,サイドフォースの減少が支配的であるため,最終的にセルフアライニングトルクは
小さくなると推察される.
- 86 -
Tz : Self-aligning torque [Nm]
4.4 車輪走行実験
Slip angle
4 [deg] (experiment)
4 [deg] (Theory)
8 [deg] (experiment)
8 [deg] (Theory)
12 [deg] (experiment)
12 [deg] (Theory)
16 [deg] (experiment)
16 [deg] (Theory)
0.6
0.5
0.4
0.3
0.2
0.1
0.0
0.0
0.2
0.4
0.6
0.8
1.0
Slip ratio
図 4.20: Numerical simulation vs. Experimental results of Self-aligning torque
以上よりセルフアライニングトルクの特性として,そのトルクを構成するサイドフォー
スとトレール距離に依存する.それらの要素の影響性は,すべり率の小さい領域ではト
レール距離の支配性が強く,すべり率が大きくなるとサイドフォースの影響が大きくな
る,という関係があると考えられる.
4.4.6
車輪安定性に関する考察
これまで述べてきたように軟弱地盤上の剛性車輪では,力の発生点が車輪中心から前
方に存在するためセルフアライニングトルクがスリップ角を増加させる方向に発生して
しまうことが分かった.この現象によって走行安定性に支障をきたすと考えられる.
そこで「軟弱地盤上における剛性車輪」という関係においてセルフアライニングトル
クを復元トルクとして作用させるためのメカニズムについて明らかにする.まずはじめ
に自動車におけるセルフアライニングトルクのメカニズムについて示し,そこで得られ
る知見をもとに軟弱地盤上における剛性車輪の関係に応用させる.
自動車におけるセルフアライニングトルク
自動車の車輪(タイヤ)において発生するセルフアライニングトルクは先に述べたよ
うに,タイヤが進行方向へ戻ろうとする復元方向に働く.これはサイドフォースの発生
点が車輪後方にあるためで,図4.21に示すように車輪中心から力の発生点までの距離
(ニューマチックトレール)を tp とする.また一般にキングピンと車輪鉛直方向のなす
角をキャスタ角と呼び,図中では γ として表す.このキングピン取り付け角であるキャ
- 87 -
第4 章
月模擬砂を用いた車輪走行実験
Ms
Traveling direction
Caster angle
:γ
Kingpin
te cosγ
re
tp tc
te
図 4.21: Relationship between self-aligning torque and caster angle (1)
(a pneumatic tire on a rigid surface)
スタ角 γ の存在によって車輪の直進安定性が増すと言われている.
車輪の軸心高さ(タイヤ有効半径)を re とすれば,
tc = re · tan γ
(4.5)
となる.この tc のことを幾何学的トレールと呼ぶ.また te = (tc + tp ) を有効トレール
と呼ぶ.
横滑りによってサイドフォースが発生したとき,キングピンまわりに復元モーメント
Ms を生じる.
Ms = Fy × te cos γ
(4.6)
このモーメントはキングピンまわりに操舵角を0にしようとする方向へ働く.つまりこ
れがセルフアライニングトルクに相当する.ここで車輪特性によって決定されるのが
Fy ,tp ,re などであり,一方 tc は γ によって一意に決まる.つまり,キャスタ角 γ を
大きくすることによって,タイヤの直進性を増すとともに舵の戻りを強くすることがで
きる.また荷重によって舵の切込みを強くしステアリングを軽くする作用を併せ持つ.
このことは自転車を例にとれば容易に理解できる.キャスタ角が小さい場合,オーバス
テアとなり,大きい程アンダーステア傾向になる.
軟弱地盤上における剛性車輪のセルフアライニングトルク
軟弱地盤上における剛性車輪では,セルフアライニングトルクが直進状態への復元方
向とは反対方向へ発生し直進安定性を欠いていた.しかし自動車のようにキャスタ角を
設けるメカニズムを用いることによって,反復元方向に発生していたセルフアライニン
グトルクを復元方向へ転換できるのではないかと考える.
- 88 -
4.5 車輪形状に関する検討
τz
τz
Traveling direction
Traveling direction
Caster angle : γ
Kingpin
Kingpin
r
r
P
θm
P
θm
P'
tr
tr
(b)
(a)
図 4.22: Relationship between self-aligning torque and castor angle (2)
(rigid wheel on loose soil)
走行実験における車輪とキングピンとのコンフィグレーションを図4.22-(a)に示す.車
輪中心から tr だけオフセットした点Pにおいてサイドフォースが生じ,セルフアライニ
ングトルクが発生する.
セルフアライニングトルクはステアリング軸まわりに発生すると考えると,図4.22-(b)
に示すように点Pよりも車輪前方にステアリング軸が存在する場合,セルフアライニン
グトルクは(a)の状態とは逆方向に発生する.つまりキャスタ角 γ を θm よりも大きく
なるようなコンフィグレーションとすれば,軟弱地盤上においてもセルフアライニング
トルクを復元方向に発生させることができる.またローバーの直進安定性を増加させた
い場合も,図4.22-(b)のようなコンフィグレーションにすると良いということがわかる.
特に θm = γ とするようにキャスタ角を設ければキングピン軸まわりに発生するトルク
は0となる.
厳密にはこの場合の τz をセルフアライニングトルクとは言わずただの復元モーメン
トと記すのが一般的である.この考察から,実際ローバーを走行させているときにステ
アリング軸に負担がかかってしまい,軸の曲げが確認された事例がある経験を踏まえ,
ステアリング軸まわりの設計などへの応用が可能ではないかと考える.
4.5
車輪形状に関する検討
本節では車輪形状が力に与える影響に関して示す.前節までの走行実験において用い
た車輪表面が平滑な車輪Aに加え,車輪表面に板状の「パドル」を複数枚持つ車輪Bを
用い走行実験をおこなう.この実験から得られる相違点および力学的な傾向について言
及する.なお駆動力,サイドフォース,セルフアライニングトルクの3つについて車輪
形状の比較をおこなう.
- 89 -
第4 章
月模擬砂を用いた車輪走行実験
4.5.1
駆動力:Fx
定常値に関して
図4.23より,両者の違いが顕著となるのはすべり率が大きい状態である.すべり率が
小さい領域では,大きな違いは見られず車輪A(パドル無し)の方がやや小さい駆動力で
あるが,車輪B(パドルあり)・車輪Aともにほぼ同じ値を示している.
まず,すべり率が0近傍では車輪A,Bともに負の駆動力をとる.これは4.4節において
考察したものと同様に,車輪x軸方向に関するせん断応力よりも垂直応力の方が支配的
であり,またすべり率が小さい状態では土壌変形も小さいため駆動力を生成することが
出来ず負の値となるためと考えられる.
次に,すべり率が大きい場合に駆動力の違いが顕著になることに関して,パドル効果
について考える.パドルは土壌を掻くために備え付けられるもので,ゴムタイヤのよう
なグリップ力とは異なりパドルの部分が土壌と接し且つ「滑る」ことによってその効果
を発揮する.そのためすべり率0.5や0.6付近から急激に車輪Bの駆動力が増加しているこ
とがわかる.この考察をすべり率の小さい領域に反映させると,すべり率が小さい状態
では「パドルが土壌を掻く」という効果は発揮できず,パドルがない状態と物理現象と
してはあまり変わりの無いものになったと考えられ,その結果すべり率の小さい領域に
おいてパドルの有無に大きな違いが見られないと考えられる.
すべり率が大きい領域において,車輪Bの実験結果は比較的大きな偏差を持つことが
グラフから見て取れる.この原因として図4.25に示すように,(1)パドルの効果により土
壌を前方に運んでしまい,車輪入射角が不安定となった,(2)パドルとの間に砂が詰まっ
てパドルの効果がなくなり,土壌を掻くとき掻かないときがある,(3)車輪後部や下部の
土壌をパドルにより掘削した後も,同じ部分の土壌を掻くため,Fx が不安定になる,
などが考えられる.
さらに,パドルあり時のすべり率-駆動力曲線の傾向に関して,参考文献[33]によると,
土壌のせん断応力試験に基づいた観点から考察をおこなうと,すべり率0.2
以下の状態では車輪下部の土壌は最大せん断応力に達しておらず,せん断負
荷が小さいため駆動力が増加する.さらにすべり率の増加によりせん断応力
が最大せん断応力に達するため,駆動力の増加が停止する.そしてすべり率
0.7以上における駆動力の増加については,車輪下部のせん断応力のピーク
値が拡大したためである.
という考察をおこなっている.
- 90 -
4.5 車輪形状に関する検討
過渡状態に関して
駆動力の過渡状態を図4.24に示す.すべり率が大きい状態において車輪Aの場合は過
渡状態は定常値よりも大きな値を示し,ややオーバーシュート気味に立ち上がる傾向が
あることが分かった.一方,車輪Bの場合はすべり率が大きくなっても力の過渡状態は
定常値よりも大きくなることはなく,滑らかに定常値に追従・落ち着くことが分かった.
これはパドルによって始動時の車輪のすべりを軽減するとともに,始動トルク等のダン
パーの役割もパドルが果たしていると考えられる.
4.5.2
サイドフォース:Fy
図4.26より,サイドフォースに関しては車輪Aよりも車輪Bの場合の方が一定の割合
でサイドフォースが大きくなる.これは,(1)パドル効果によって沈下量が増したため,
(2) ky :土壌変形定数の値が変わるまたは,jy :土壌変形量が増加したため,そして(3)
パドルがあることによりy軸方向に生じるせん断応力が作用する面積(=濡れ面積)が
パドルの面積分だけ増えたため,といった原因が考えられる.
またパドルが無い状態において,サイドフォースが負値となるケースがある.これは
おそらく車輪下部において土壌が後方から見て右側へ排出されるため,車輪下の土壌が
不均一な高さとなり土壌平面に対して車輪が傾く,つまりキャンバ角が生じてしまうた
めではないかと考えられる.特にサイドフォースが小さくなるすべり率0.9付近において
サイドフォースの負値がグラフから見て取れる.車輪Bの場合は,車輪下部の掘削が積
極的におこなわれるため,土壌の高さに顕著な違いが現われないと推察される.
またサイドフォースの過渡状態について調べた結果,パドルの有無にかかわらず力の
立ち上がりは同様の傾向を見せた.
4.5.3
セルフアライニングトルク:τz
図4.27より,セルフアライニングトルクに関しては車輪形状によって全く異なった傾向
を示すことが分かった.この傾向をよく見ると,車輪Bのケースでは駆動力の傾向に似
ている一方で車輪Aの場合はサイドフォースの傾向に相似することがグラフから分かる.
車輪Bの場合,パドル面が土壌に非平行に入射しパドル面と土壌とが漸近的に接触す
ることによって,セルフアライニングトルクが生成されるプロセスであると思われる.
図4.28に示すようにパドルによって掻きだされる土壌は斜めに堆積するため,すべり率
の大きい領域においてセルフアライニングトルクが増加したとも考えられる.そのため
パドルがある場合のセルフアライニングトルクのモデルは従来のものとは全く異なった
ものになると考えられる.
- 91 -
第4 章
月模擬砂を用いた車輪走行実験
60
w/o Paddle
w/ Paddle
40
20
0
0.0
0.2
w/o Paddle
w/ Paddle
Fx : Drawbar pull [N]
Fx : Drawbar pull [N]
60
0.4
0.6
0.8
40
20
0
1.0
0.0
0.2
0.4
Slip ratio
(slip angle = 0[deg])
1.0
60
w/o Paddle
w/ Paddle
40
20
0
0.2
w/o Paddle
w/ Paddle
Fx : Drawbar pull [N]
Fx : Drawbar pull [N]
0.8
(slip angle = 4[deg])
60
0.0
0.6
Slip ratio
0.4
0.6
0.8
40
20
0
1.0
0.0
0.2
0.4
Slip ratio
0.6
0.8
1.0
Slip ratio
(slip angle = 8[deg])
(slip angle = 12[deg])
Fx : Drawbar pull [N]
60
w/o Paddle
w/ Paddle
40
20
0
0.0
0.2
0.4
0.6
0.8
1.0
Slip ratio
(slip angle = 16[deg])
図 4.23: Comparison of wheel shape:Drawbar pull (steady state)
Fx : Drawbar pull [N]
30
20
10
w/ Paddle
s = 0.1
s = 0.4
s = 0.8
40
Fx : Drawbar pull [N]
w/o Paddle
s = 0.1
s = 0.4
s = 0.8
40
0
30
20
10
0
0
5
10
time [s]
15
20
0
5
10
15
20
time [s]
w/o Paddle
w/ Paddle
図 4.24: Comparison of wheel shape:Drawbar pull (transient state)
- 92 -
4.5 車輪形状に関する検討
図 4.25: Snapshot of sinking wheel (slip ratio = 0.9)
4.5.4
車輪形状に関するまとめ
以上述べたように車輪の形状によっては,本研究において提案したモデルが必ずしも
合致するとはいえない.
車輪が走行した後の轍に注目すると,車輪Aの轍はある大きさのすべり率のとき「せ
ん断干渉縞」と呼ばれる縞模様が観察される(図4.29).この模様は土壌表面において波
を打つような形をしている.この縞が形成される理由として,
「車輪は,前方において土
壌を圧縮し後方で開放する」という物理現象からも分かるように,ある一定の間隔で圧
縮・開放のプロセスがおこなわれるため,土壌のせん断限界に達したとき縞が形成され
ると推察できる.車輪Bの場合は干渉縞の現象が見られないことより,このような物理
現象が車輪に発生する力にも影響を与えているのではないかと思われる.
本節で示したように,車輪表面の形状によって,車輪下部の垂直応力分布が変わって
しまうことや,車輪表面のオブジェクト(スパイクやパドル)などの効果も無視できない.
よって車輪表面の形状効果を含めた車輪力学モデルの構築が今後の必要課題である.
- 93 -
第4 章
月模擬砂を用いた車輪走行実験
w/o Paddle
w/ Paddle
20
10
20
10
0
0.0
w/o Paddle
w/ Paddle
30
Fy : Side force [N]
Fy : Side force [N]
30
0
0.2
0.4
0.6
0.8
1.0
0.0
0.2
0.4
Slip ratio
(slip angle = 0[deg])
1.0
w/o Paddle
w/ Paddle
Fy : Side force [N]
30
20
10
20
10
0
0
0.2
0.4
0.6
0.8
1.0
0.0
0.2
0.4
Slip ratio
0.6
0.8
Slip ratio
(slip angle = 8[deg])
(slip angle = 12[deg])
w/o Paddle
w/ Paddle
30
Fy : Side force [N]
Fy : Side force [N]
0.8
(slip angle = 4[deg])
w/o Paddle
w/ Paddle
30
0.0
0.6
Slip ratio
20
10
0
0.0
0.2
0.4
0.6
0.8
1.0
Slip ratio
(slip angle = 16[deg])
図 4.26: Comparison of wheel shape:Side force
- 94 -
1.0
4.5 車輪形状に関する検討
1.0
1.2
w/o Paddle
w/ Paddle
Tz : Self-aligning torque [Nm]
Tz : Self-aligning torque [Nm]
1.2
0.8
0.6
0.4
0.2
0.0
0.0
0.2
0.4
0.6
0.8
w/o Paddle
w/ Paddle
1.0
0.8
0.6
0.4
0.2
0.0
0.0
1.0
0.2
0.4
Slip ratio
(slip angle = 0[deg])
Tz : Self-aligning torque [Nm]
0.6
0.4
0.2
0.2
0.4
0.6
0.8
w/o Paddle
w/ Paddle
1.0
0.8
0.6
0.4
0.2
0.0
0.0
1.0
0.2
0.4
Slip ratio
0.6
0.8
Slip ratio
(slip angle = 8[deg])
(slip angle = 12[deg])
1.2
Tz : Self-aligning torque [Nm]
Tz : Self-aligning torque [Nm]
1.0
1.2
w/o Paddle
w/ Paddle
0.8
0.0
0.0
0.8
(slip angle = 4[deg])
1.2
1.0
0.6
Slip ratio
1.0
w/o Paddle
w/ Paddle
0.8
0.6
0.4
0.2
0.0
0.0
0.2
0.4
0.6
0.8
1.0
Slip ratio
(slip angle = 16[deg])
図 4.27: Comparison of wheel shape:Self-aligning torque
- 95 -
1.0
第4 章
月模擬砂を用いた車輪走行実験
図 4.28: Snapshot from backward wheel
(slip ratio = 0.7, slip angle = 12[deg])
Striped pattern
Striped pattern
(slip ratio = 0.2)
(slip ratio = 0.4)
図 4.29: Striped pattern of the soil formed by shear stress
- 96 -
第 5章
車輪力学モデルを用いた動力学シミュ
レーション
5.1
はじめに
月や惑星を走行移動するローバーが実際にどのような挙動を示すか知るためには,月・
惑星の環境と類似した環境を地球上に構築し,ローバーの走行試験をおこなうという方
法が一般的である.しかしながら実験のためには巨大試験装置が必要となり,相似側に
基づいた試験研究をおこなった例もあるが,重力環境を酷似させることは困難である.
そこで地上走行試験のみの研究では不十分であるため,走行実験と平行して数値解析に
よるシミュレーション環境の構築がおこなわれている.シミュレーション環境内であれ
ば走行環境の重力は容易に変更することが可能である.
第2章において述べたように,本研究ではローバーの挙動解析の手法として車輪力学
モデルを用いた動力学シミュレーションをおこなう「全輪動力学モデル」を提案する.
第3章において提案した車輪力学モデルをローバーの動力学モデルに付加することによっ
て,より正確な挙動解析をおこなうことが可能であると考えた.
本章では,まずはじめにローバーの動力学モデルを構築し車輪力学モデルとの関連性
について言及する.さらにこの全輪動力学モデルを用い,ステアリング時のローバーの
シミュレーションを示すとともに,重力環境を変化させ,地球上と月面上を走行する
ローバーの挙動の相違点について述べる.
さらに全輪動力学モデルについて,第2章において示したステアリング走行実験およ
びBicycleモデルとの比較をおこない,その妥当性を検討する.
- 97 -
第5 章
車輪力学モデルを用いた動力学シミュレーション
表 5.1: Definition of each joint angle
5.2
Symbols
Joint angle
θbg1
left bogie angle
θbg2
right bogie angle
θst1
left-front steering angle
θst2
left-rear steering angle
θst3
right-rear steering angle
θst4
right-fornt steering angle
θw1
left-front wheel angle
θw2
left-rear wheel angle
θw3
right-rear wheel angle
θw4
right-front wheel angle
ローバーのモデル化
ローバーのモデルに用いたテストベッドは第2章において示したテストベッド同様の
ものであり,詳細は付録Aに示す.
5.2.1
キネマティクスモデル
ローバーのキネマティクスモデルを図5.1に示す.
ローバー本体のベース座標系は水平面進行方向にx軸をとり,鉛直上向きにz軸を持つ
右手系とする.ローバー本体の姿勢は,慣性座標系からローバー座標系へのオイラー
角を用いて表すことができる.この時,各主軸周りの回転角を θx ,θy ,θz とすると,
ローバーの姿勢 Q0 は以下のように表すことができる.
θx
Q0 =
θy
θz
(5.1)
ローバーの関節の自由度は,本体の左右にボギーサスペンション機構と呼ばれる関節
を2つ,前後4輪のステアリングに 4 つ,車輪に 4 つ配置されており,合計 10 自由度で
ある(図5.1参照).いずれの自由度も回転関節とし,それら関節変位角は表5.1のように
定義する.
左右のボギーサスペンションについては,それらを繋ぐディファレンシャルリンクの
- 98 -
5.2 ローバーのモデル化
z
Base
y
x
Bogie-joint
Steering
Wheel
図 5.1: Kinematics model of the rover
働きによって,以下の関係が成り立つ.
θbg1 = −θbg2
(5.2)
片側の車輪のみが障害物を乗り越えようとする際,本体y軸周りの変位角 θy は,ボギー
リンクと水平面がなす角を平均したものである.慣性座標からみた各関節の変位角に添
え字 i をつけると,本体y軸周りの変位角 θyi は以下のようになる.
θyi
i
i
+ θbg2
θbg1
=
2
(5.3)
このディファレンシャル機能により本体に伝わる変位が平均化されるため,本体の姿勢
の変動は小さくなる.
5.2.2
ダイナミクスモデル
ローバーのダイナミクスモデルを図5.2に示す.
本シミュレーションでは,ローバーをオープンツリー構造の多節剛体系としてモデル
化する.各回転関節に作用するトルクは,ボギーリンク関節において τ ,ステアリン
グにおいて τ ,車輪において τ と表す.ローバーに作用する外力としては重力のほ
かに,土壌から車輪へ生じるfw が考えられる.このうち重力は各リンクの重心に作用す
る.fw は各車輪の重心に作用する.ここで fw の導出には第3章において定式化した車
輪力学モデルを用いる.
- 99 -
第5 章
車輪力学モデルを用いた動力学シミュレーション
τbg2
τst1
τw1
τst4
τw3
fw2
mg
fw1
τw4
fw4
fw3
図 5.2: Dynamics model of the rover
ローバー全体の運動方程式は次のように表すことができる.
F0
v̇ 0
N
ω̇
0
0
T
H θ̈ + C =
τ
+ J F e
τ
θ̈
θ̈
τ
(5.4)
なお,
H : ローバー全体の慣性項
C : 速度非線形項
v 0 : ボディの並進速度
ω 0 : ボディの姿勢角速度
θ : ボギーサスペンションの回転角
θ : ステアリングの回転角
θ : 車輪回転軸周りの回転角
F 0 = (0, 0, −mg)T :ボディ重心に作用する力
N 0 : ボディに作用するトルク
τ : 式(5.2),式(5.3)の関係を実現するためにボギーサスペンションに作用するトルク
τ : ステアリングに作用するトルク
- 100 -
5.3 車輪力学モデルと動力学モデルの統合化
y4
y9
z1
y0
z8
z6
x7
z7
x0
x6
x5
y10
x9
zi
x1
x3
x2
z5
x4
x8
y2
y3
x10
y5
x9
yi
y6
x5
x2
z9
xi
z2
x10
x6
z10
xi
図 5.3: Coordinate system of the rover model
τ : 車輪回転軸に作用するトルク
J : ヤコビ行列
T
T T
F e = fw1
, · · · , fw4
:各車輪重心に作用する力
fwi = [Fxwi , Fywi , Fzwi ]:車輪力学モデルから導出される各軸への力 (i = 1 ∼ 4)
である.本来ボギーサスペンションは付録Aに示すように完全なパッシブリンクである
が,動力学モデルに適用するため左右ボギーリンクには,式(5.2),式(5.3)の関係をみた
すトルクが作用することとした.また各ステアリング軸はウォームギヤ・ホイールに
よって構成されており,車輪側からのバックドライブに対しステアリングモータを使用
することなく擬似的に無限大のトルクを発生することが可能である.
本研究でおこなう動力学計算には,本研究室で開発されたSpacedyn[34]を用いた.
5.2.3
ローバーの力学パラメータ
ローバーの各リンクの座標系を図5.3に,またベース部および各リンクの質量,慣性
モーメントを表5.2に示す.なお慣性モーメントはCADソフト「SolidWorks」を用いて
解析した.
5.3
車輪力学モデルと動力学モデルの統合化
本研究では,第3章において示した車輪力学モデルを動力学モデルへ組み込むことに
よって全輪動力学モデルを構築し,シミュレーションの統合化を図った.計算の流れを
- 101 -
第5 章
車輪力学モデルを用いた動力学シミュレーション
表 5.2: Mass and inertia of the rover
link number
link name
0
base
1, 2
inretia [kgm2 ]
mass
[kg]
Ixx
Iyy
Izz
13.52 0.2414 0.1559
0.3076
bogie link
3.81
0.0156 0.3092
0.3181
3∼6
steer link
1.20
0.0048 0.0045
0.0013
7 ∼ 10
wheel link
2.30
0.0080 0.0080
0.0081
以下に示し,フローチャートを図5.4に表す.
1. 各車輪の目標回転速度 ω ,ステアリング角 δ を入力する.
2. ローバーの運動学モデルを構築(更新)する.
3. 車輪力学モデルに基づき各車輪において生じる力を計算する.
(a) 車輪の静的沈下量および動的沈下量を求め,総沈下量 h を算出する.
(b) 車輪の進入角 θf ,離脱角 θr を計算する.
(c) 車輪の垂直応力 σ(θ),せん断応力 τx (θ),τy (θ) を求める.
(d) Fx ,Fy ,Fz をそれぞれ算出する.
4. 各関節のトルク,ベースの力・トルクを計算する.
5. ローバーの動力学モデルを構築(更新)し式(5.4)を解き,ベースの位置・姿勢および
関節角度・角速度を求める.
6. すべり率 s,スリップ角 β を更新し,2に戻る.
5.3.1
動力学計算における車輪のすべり率・スリップ角の導出
車両について挙動解析をおこなううえで,各車輪のすべり率とスリップ角の導出方法
が問題となる.実際の走行を想定すると,各車輪のすべり率とスリップ角は時々刻々変
化する.そこで本研究では,動力学計算によって得られるベース部(ローバー本体)の移
動速度および回転速度をもとに計算することを提案する.
まず図5.5に示すように,各車輪に関する変数の添え字について左前後輪をそれぞれf L,
rL,右前後輪をそれぞれf R,rRとする.本体部分の速度 vb を車輪座標系に変換するこ
とによって,各車輪座標系における速度 vxij ,vyij (i = f, r
j = L, R) が算出される.
さらにステアリング走行をしているローバーの重心z軸まわりには,図5.5に示すように
- 102 -
5.3 車輪力学モデルと動力学モデルの統合化
δ : steer angle
ω : wheel angular velocity
s : slip ratio
β : slip angle
joints angle
Rover model
h
N0 , F0
τbg , τst , τw
Wheel
Dynamics
model
θf , θr
σ,τ
Fx, Fy, Fz
Soil parameters
( Terrain model )
Dynamics simulation
図 5.4: Calcualtion flow of dynamics simulation
- 103 -
第5 章
車輪力学モデルを用いた動力学シミュレーション
回転速度 ψ̇が生じる.この車体回転速度 ψ̇ によって,各車輪重心に速度 uij が発生し,
uij = Lij × ψ̇
(5.5)
により計算される.ここで Lij は各車輪重心から車体重心間の距離である.
Lij = L2i + d2j
(5.6)
さらに車輪重心と車体重心のなす角を,
ij = tan−1
dj
π
(0 ≤ ij ≤ )
Li
2
(5.7)
と定義する.uij と車輪座標系のx軸がなす角を λij (0 ≤ λij ≤ π/2) と表すことにすると
各車輪座標系におけるx方向,y方向の速度 uxij ,uyij は以下のようになる.
ij
fL
rL
rR
fR
δij ≤ ij
λij
uxij
π/2 − (f L − δf L ) −uf L cos λf L
π/2 − (rL + δrL ) −urL cos λrL
π/2 − (rR − δrR )
urR cos λrR
π/2 − (f R + δf R )
uf R cos λf R
uyij
uf L sin λf L
−urL sin λrL
−urR sin λrR
uf R sin λf R
となる.しかしながら,上記の式はステアリング角が ij より小さい場合に関したもの
であるため,ステアリング角 δij が ij よりも大きくなる場合は以下のようになる.
δij ≥ ij
ij
fL
rL
rR
fR
(ψ̇ > 0)
uxij
uf L cos λf L
urL cos λrL
urR cos λrR
uf R cos λf R
uyij
uf L sin λf L
−urL sin λrL
−urR sin λrR
uf R sin λf R
(ψ̇ < 0)
uxij
−uf L cos λf L
−urL cos λrL
−urR cos λrR
−uf R cos λf R
uyij
uf L sin λf L
−urL sin λrL
−urR sin λrR
uf R sin λf R
λij
π/2 − (δf L − f L )
π/2 − (δrL + rL )
π/2 − (δrR − rR )
π/2 − (δf R + f R )
δij ≥ ij
ij
fL
rL
rR
fR
λij
π/2 − (δf L − f L )
π/2 − (δrL + rL )
π/2 − (δrR − rR )
π/2 − (δf R + f R )
よって図5.6に示すように,各車輪の座標系において生じる正味のx方向,y方向の速
度 vxij ,vyij は,
vxij = vxij + uxij
vyij = vyij + uyij
- 104 -
(5.8)
(5.9)
5.4 シミュレーション概要
となり,最終的に各車輪のすべり率,スリップ角は,
sij =
βij
rωij − vxij
rωij
v
y
= tan−1 ij
vxij
(5.10)
(5.11)
によって導出することが可能となる.
5.4
シミュレーション概要
シミュレーションの条件を以下のように設定した.ステアリング角は左右前輪のみ15
[deg]と30 [deg]の状態についておこなう.
シミュレーション時間(ローバーの走行時間)は7 [s],時間刻みは0.5 [ms]とし,シミュ
レーションによって得られたデータをグラフ化するとともに3DCGソフト「3dsmax」に
データを取り込み走行の状態を可視化し,ステアリング角の違いによるローバ―の挙動
の相違点について考察する.
各車輪のa)すべり率,b)スリップ角,c)駆動力,d)サイドフォース,e)垂直抗力の時
間プロファイル,およびベース部のf)ロール軸,ピッチ軸,g)ヨー軸,z軸移動変位の時
間プロファイルと,h)ローバーの移動軌跡(慣性座標x - y軸移動変位)に関してグラフを
作成し考察をおこなう.
さらに重力環境を地球上1Gと月面上1/6Gのように変化させた場合についてもシミュ
レーションをおこない,重力環境が異なるもとでのローバーの走行挙動について評価する.
5.5
5.5.1
シミュレーション結果
ステアリング角度による挙動の比較
ステアリング角15 [deg]および30 [deg]のシミュレーションの結果を図5.7,図5.8にそ
れぞれ示す.得られたデータのプロファイルが振動しているが,これは車体のボギーリ
ンクサスペンションに対して適切なバネ・ダンパゲインを与えることが出来なかったこ
とに起因すると思われる.
まずステア角15 [deg]の時,各車輪のすべり率は図5.7-(a)のように進行方向左側より
も右側,すなわちアウト側の車輪のすべり率が小さくなることがわかる.また同図-(b)
よりスリップ角は前輪が負の方向,後輪が正の方向へスリップ角を持つことがそれぞれ
わかる.一方,図5.8-(a)に示すようにステア角30 [deg]のケースでは,すべり率の傾向
は15 [deg]のケースと同様であるが,スリップ角に関しては負の方向となるのは右前輪
- 105 -
第5 章
車輪力学モデルを用いた動力学シミュレーション
λfR δfR
δfL
ufR
ufL
εfL
λfL
LfL
δrL
LrL
εrL
εfR
Lf
LfR
ψ
L
LrR
εrR
δrR λrR
Lr
urR
urL
xi
λrL
dL
yi
dR
図 5.5: Derivation of slip ratio and slip angle of each wheel (1)
δfL
xw
vfL
ufL
vxfL
δfR
vfL
ufR
vb β
Lf
ψ
vyfL
urR
uyfL
yw
ufL
L
Lr
urL
uxfL
d
xi
d
yi
図 5.6: Derivation of slip ratio and slip angle of each wheel (2)
- 106 -
5.5 シミュレーション結果
1.0
0.15
Steering angle = 15[deg]
front - left wheel
rear - left wheel
rear - right wheel
front - right wheel
Steering angle = 15[deg]
front - left wheel
rear - left wheel
rear - right wheel
front - right wheel
0.10
slip angle [rad]
slip ratio
0.8
0.6
0.4
0.2
0.05
0.00
-0.05
0.0
-0.10
0
1
2
3
4
5
6
7
0
1
2
3
time [s]
4
5
6
7
time [s]
(a) time - slip ratio
(b) time - slip angle
25
Steering angle = 15 [deg]
front - left wheel
rear - left wheel
rear - right wheel
front - right wheel
20
5
10
Fy [N]
Fx [N]
15
Steering angle = 15[deg]
front - left wheel
rear - left wheel
rear - right wheel
front - right wheel
10
5
0
0
-5
-5
-10
0
1
2
3
4
5
6
7
0
1
2
3
time [s]
4
5
6
7
time [s]
(c) time - Drawbar pull Fx
(d) time - Side force Fy
-3
4x10
Steering angle = 15 [deg]
roll angle
pitch angle
roll / pitch angle [rad]
100
Fz [N]
90
80
70
Steering angle = 15[deg]
front - left wheel
rear - left wheel
rear - right wheel
front - right wheel
60
3
2
1
0
50
0
1
2
3
4
5
6
7
0
1
2
time [s]
(e) time - Vertical force Fz
Steering angle = 15 [deg]
Z position
Yaw angle
1.0
0.8
0.8
0.6
0.4
0.335
0.330
1
2
3
4
5
6
yaw angle [rad]
Z position [m]
1.0
0.340
0
4
5
6
7
(f) time - base roll, pitch
Y position [m]
0.350
0.345
3
time [s]
0.6
0.4
0.2
0.2
0.0
0.0
0.0
7
time [s]
Steering angle = 15 [deg]
Trajectory
0.2
0.4
0.6
0.8
1.0
1.2
X position[m]
(g) time - base position : z, base yaw
(h) base position : x - base position : y
図 5.7: Simulation results:steering angle = 15[deg]
- 107 -
第5 章
車輪力学モデルを用いた動力学シミュレーション
1.0
0.20
Steering angle = 30[deg]
front - left wheel
rear - left wheel
rear - right wheel
front - right wheel
slip angle [rad]
0.8
0.6
slip ratio
Steering angle = 30[deg]
front - left wheel
rear - left wheel
rear - right wheel
front - right wheel
0.15
0.4
0.2
0.10
0.05
0.00
-0.05
-0.10
0.0
-0.15
0
1
2
3
4
5
6
7
0
1
2
3
time [s]
(a) time - slip ratio
5
6
7
(b) time - slip angle
25
25
Steering angle = 30 [deg]
front - left wheel
rear - left wheel
rear - right wheel
front - right wheel
20
15
Steering angle = 30 [deg]
front - left wheel
rear - left wheel
rear - right wheel
front - right wheel
20
15
Fx [N]
10
Fx [N]
4
time [s]
5
0
10
5
0
-5
-5
-10
-10
0
1
2
3
4
5
6
7
0
1
2
3
time [s]
4
5
6
7
time [s]
(c) time - Drawbar pull Fx
(d) time - Side force Fy
-3
4x10
roll / pitch angle [rad]
100
Fz [N]
90
80
70
Steering angle = 30[deg]
front - left wheel
rear - left wheel
rear - right wheel
front - right wheel
60
Steering angle = 30 [deg]
roll angle
pitch angle
3
2
1
0
50
0
1
2
3
4
5
6
7
0
1
2
3
time [s]
(e) time - Vertical force Fz
Steering angle = 30 [deg]
Z position
Yaw angle
1.0
0.8
0.8
0.6
0.4
0.335
0.330
1
2
3
4
5
6
yaw angle [rad]
Z position [m]
1.0
0.340
0
5
6
7
(f) time - base roll, pitch
Y position [m]
0.350
0.345
4
time [s]
0.6
0.4
0.2
0.2
0.0
0.0
0.0
7
time [s]
Steering angle = 30 [deg]
Trajectory
0.2
0.4
0.6
0.8
1.0
1.2
X position[m]
(g) time - base position : z, base yaw
(h) base position : x - base position : y
図 5.8: Simulation results:steering angle = 30[deg]
- 108 -
5.5 シミュレーション結果
Cornering and Centrifugal force [N]
Cornering and Centrifugal force [N]
6
5
4
Steering angle = 15[deg]
Centrifugal force
Cornering force
3
2
1
0
-1
0
1
2
3
4
time [s]
5
6
6
5
4
3
Steering angle = 30[deg]
Centrifugal force
Cornering force
2
1
0
-1
0
7
1
2
3
4
5
6
7
time [s]
(a) steering angle=15[deg]
(b) steering angle=30[deg]
図 5.9: Consideration of steering characteristics based on steering angle effect
のみである.このようにステアリング角によって,各車輪のすべり率,スリップ角の傾
向に相違点が現われるということが判明する.
これらの結果より,本ローバーのコンフィグレーションによって走行をおこなった場
合,定性的ではあるが各車輪に以上のような傾向が現われるということがシミュレー
ションより予想される.
また図5.7,図5.8の(c),(d),(e)に示すように各車輪に生じる力も時間とともに一定
値に収束し定常値のもとステアリングをおこなっている.特に(e)に示される垂直抗力の
総和は車体の全重量と等しいということが確認された.(f)よりローバーの本体のロー
ル,ピッチ軸周りの回転も十分小さいため比較的安定して走行していることがわかる.
さらに(g)よりステア角に関係なく車体全体の土壌への沈下量は11 [mm]程度であること
が確認できる.
5.5.2
動力学シミュレーションにおけるステアリング特性の考察
シミュレーションから得られる各車輪の駆動力,サイドフォースおよびスリップ角か
ら式(3.1)に基づいてコーナリングフォースが算出される.これら各車輪において生じる
コーナリングフォースの総和と,同じくシミュレーションから得られるローバ―本体の
遠心力の大きさを比較することによって,ローバーのステアリング特性を知ることが可
能となる.
図5.9にそれぞれ時間に対し,コーナリングフォースの総和と遠心力の時間プロファ
イルを図示する.図よりいずれのステアリング角においてもコーナリングフォースの方
が大きい,つまり「オーバステア」の特性を有するということが分かった.特にステア
リング角30 [deg]のときのコーナリングフォースと遠心力の差は顕著であることより,
オーバステアの特性も明確に現われると考えられる.
- 109 -
第5 章
車輪力学モデルを用いた動力学シミュレーション
1.0
Y position [m]
0.8
Rover trajectory
Steering angle = 15[deg]
Steering angle = 30[deg]
0.6
0.4
0.2
0.0
0.0
0.2
0.4
0.6
0.8
1.0
1.2
X position[m]
図 5.10: Comparison of the rover trajectories
走行軌跡の比較
ステアリング角の違いによる走行軌跡の比較をおこなう.図5.10に走行軌跡を示す.
ステアリング角によって走行される軌跡が全く違うことが同図より明らかである.ステ
アリング角30 [deg]のケースでは図5.9に示したように,コーナリングフォースが遠心力
に対し十分大きいため,大きく内側へ回りこむような走行軌跡になった.また,それぞ
れの走行シミュレーション結果を可視化したものを図5.11に示す.
5.5.3
重力環境の比較
重力環境を月重力である1/6Gに設定してシミュレーションをおこなった.その結果
を図5.12に示す.なおステアリング角は15 [deg]とした.
これらシミュレーションの結果を図5.7と比較すると,まずすべり率・スリップ角に関
しては,大きな差異は見られず月重力の方がわずかだけ大きい値を生じている.しかしな
がら,駆動力,サイドフォースおよび垂直抗力は,いずれも月重力の方が非常に小さい値
をとっていることがわかる.この原因は図5.12-(g)に示すように,月重力が小さいため
車体の沈下量,すなわち車輪の沈下量が小さいため生じる力も減少してしまったと考え
られる.月重力下においては沈下量はわずか4[mm]程度であった.また,車体のロール,
ピッチ軸のプロファイルを見る限りでは車体の姿勢に大きな違いは現われなかった.
- 110 -
5.5 シミュレーション結果
time = 0[s]
time = 2[s]
time = 4[s]
Steering angle = 30[deg]
time = 7[s]
Steering angle = 15[deg]
図 5.11: Computer graphics of the rover simulations
- 111 -
第5 章
車輪力学モデルを用いた動力学シミュレーション
1.0
0.15
Gravity of the moon
Steering angle = 15[deg]
front - left wheel
rear - left wheel
rear - right wheel
front - right wheel
0.6
Gravity of the moon
Steering angle = 15[deg]
front - left wheel
rear - left wheel
rear - right wheel
front - right wheel
0.10
slip angle [rad]
slip ratio
0.8
0.4
0.2
0.05
0.00
-0.05
0.0
-0.10
0
1
2
3
4
5
6
7
0
1
2
3
time [s]
(a) time - slip ratio
2.0
Gravity of the moon
Steering angle = 15[deg]
front - left wheel
rear - left wheel
rear - right wheel
front - right wheel
2
6
7
Gravity of the moon
Steering angle = 15[deg]
front - left wheel
rear - left wheel
rear - right wheel
front - right wheel
1.5
Fy [N]
Fx [N]
3
5
(b) time - slip angle
5
4
4
time [s]
1
1.0
0.5
0
0.0
-1
-2
-0.5
0
1
2
3
4
5
6
7
0
1
2
3
time [s]
4
5
6
7
time [s]
(c) time - Drawbar pull Fx
(d) time - Side force Fy
-3
20
4x10
18
14
12
Gravity of the moon
Steering angle = 15[deg]
front - left wheel
rear - left wheel
rear - right wheel
front - right wheel
10
8
6
3
roll / pitch angle [rad]
Fz [N]
16
2
Gravity of the moon
Steering angle = 15[deg]
roll angle
pitch angle
1
0
-1
0
1
2
3
4
5
6
7
0
1
2
3
time [s]
4
5
6
7
time [s]
(e) time - Vertical force Fz
(f) time - base roll, pitch
1.0
Gravity of the moon
Steering angle = 15[deg]
Z position
Yaw angle
0.25
0.20
0.355
0.15
0.10
0.354
0.8
Y position [m]
0.356
0.30
yaw angle [rad]
Z position [m]
0.357
Gravity of the moon
Steering angle = 15[deg]
Trajectory
0.6
0.4
0.2
0.05
0.353
0.00
0
1
2
3
4
5
6
0.0
0.0
7
time [s]
0.2
0.4
0.6
0.8
1.0
1.2
X position[m]
(g) time - base position : z, base yaw
(h) base position : x - base position : y
図 5.12: Simulation results:steering angle = 15[deg] (Gravity of the moon)
- 112 -
5.6 ステアリング走行実験との比較
6
Cornering and Centrifugal force [N]
Cornering and Centrifugal force [N]
6
5
4
Steering angle = 15[deg]
Centrifugal force
Cornering force
3
2
1
0
-1
0
1
2
3
4
time [s]
5
6
5
4
Gravity of the moon
Steering angle = 15[deg]
Centrifugal force
Cornering force
3
2
1
0
-1
0
7
1
2
3
4
5
6
7
time [s]
(a) Gravity of the earth
(b) Gravity of the moon
図 5.13: Consideration of steering characteristics based on gravity effect
5.5.4
重力環境のステアリング特性への影響
図5.13に示すように,地球環境下ではコーナリングフォースと遠心力の差が0.6 [N]で
あったのに対し,月重力下ではその差が0.2 [N]程度まで小さくなっていることが判明し
た.また月重力環境においては時間とともに遠心力とコーナリングフォースがつりあうよ
うに収束する具合もグラフよりわかる.つまり月重力下ではローバーはニュートラルス
テアに近いステアリング特性を示すことが予想される.この結果は非常に興味深く,重
力環境が変化するとそのステアリング特性も変化してしまうことを示唆する結果である.
走行軌跡の比較
図5.14に走行軌跡を示す.重力環境によってローバーの走行する軌跡が異なることが
わかる.月重力下においては走行軌跡は地球上に比べ外側へ膨らむ,すなわち相対的に
アンダステアになると予想される.これは図5.13に示したようにコーナリングフォース
と遠心力の差が非常に小さかったということに起因する.
また,それぞれの走行シミュレーション結果を可視化したものを図5.15に示す.
5.6
ステアリング走行実験との比較
第2章において示したステアリング走行実験の軌跡と本章において示した全輪動力学
モデルからから得られた走行軌跡,さらにBicycleモデルによって得られた走行軌跡の3
つについて比較をおこなう.
また車輪に発生するサイドフォースに関しても,実験値,Bicycleモデルに基づく計算
値および全輪動力学モデルに基づく計算値の比較をおこない,力学的な点においても考
察をおこなう.
- 113 -
第5 章
車輪力学モデルを用いた動力学シミュレーション
0.5
Y position [m]
0.4
Rover trajectory
Steering angle 15[deg]
Gravity of the earth (1G)
Gravity of the moon (1/6G)
0.3
0.2
0.1
0.0
0.0
0.2
0.4
0.6
0.8
1.0
1.2
X position[m]
図 5.14: Comparison of the rover trajectories based on gravity effect
5.6.1
走行軌跡の比較
ステアリング角15[deg],30 [deg]のケースにおいて得られた走行軌跡をそれぞれ図5.16-(a),
図5.16-(b)に示す.ここで,シミュレーションモデルは実験時のローバーモデルと同様
のものとしたため,前述のシミュレーション結果とは異なるデータとなっている.
ステアリング角15 [deg]のケース
図5.16-(a)から分かるようにステアリング角15 [deg]のケースでは,初期段階において
はBicycleモデル,実験値および全輪動力学モデルとの結果に相違点は見られないが,走
行距離が長くなるにしたがっていずれのモデルも実験の走行軌跡とは完全には一致しな
い.このような結果となった原因はステアリング角15 [deg]程度においては,ローバー
のスリップ角はさほど大きい値はとらないためBicycleモデルにおける「スリップ角が十
分小さい」という仮定も比較的適合する可能性がある.
しかし走行が続くにしたがってBicycleモデルによる走行軌跡は実験結果とは異なる傾
向を示しており,走行を継続するとおそらく実験結果から離れる方向へと走行軌跡を算
出してしまうと考えられる.
一方,全輪動力学モデルに基づく走行軌跡は,一様に約0.05 [m]以下の誤差を持ちな
がらも実験結果と同様の傾向を示している.この0.05 [m]の長さは車輪幅の半分以下で
あり許容範囲であると思われる.
- 114 -
5.6 ステアリング走行実験との比較
time = 0[s]
time = 2[s]
time = 4[s]
Gravity of the earth
time = 7[s]
Gravity of the moon
図 5.15: Computer graphics of the rover simulations based on gravity difference
- 115 -
第5 章
車輪力学モデルを用いた動力学シミュレーション
0.7
Y position [m]
0.6
0.5
Steering angle = 15[deg]
Experiment
Bicycle model
All-wheel dynamics model
0.4
0.3
0.2
0.1
0.0
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.0
1.2
X position [m]
(a) Steering angle = 15 [deg]
X position [m]
0.0
0.0
0.2
0.4
0.6
Steering angle = 30[deg]
Expeiment
Bicycle model
All-wheel dynamics model
-0.1
Y position [m]
0.8
-0.2
-0.3
-0.4
-0.5
-0.6
-0.7
(b) Steering angle = 30 [deg]
図 5.16: Comparison of simulated trajectories
- 116 -
5.7 まとめと今後の課題
表 5.3: Comparison of side force
左15[deg]
ステアリング角
Experiment [N]
Bicycle model [N]
右30[deg]
前輪
後輪
前輪
後輪
8.92
-4.51
-2.38
10.60
0.016 0.017 0.032 0.030
All-wheel dynamics model [N]
6.73
-3.09
-0.26
7.90
ステアリング角30 [deg]のケース
ステアリング角30 [deg]のケースでは,Bicycleモデルから得られる走行軌跡は実験結
果よりも大きく内側に計算されてしまう.しかし本章において示した全輪動力学モデル
に基づくと実験値との走行軌跡が概ね一致しており,走行終了付近(x=0.8 [m],y=-0.6
[m])における誤差はおおよそ直線距離で0.09 [m]以下となった.
また図5.17に示すようにローバーの挙動をCGによって可視化をおこない,実験とBicycle
モデルの比較および実験と全輪動力学モデルの比較をおこなった.図5.17-(a)より,Bicycle
モデルに基づくと実験との走行軌跡の誤差がローバーの車体1台分ということが容易に
分かる.一方,図5.17-(b)より,全輪動力学モデルは実験結果を概ね再現しており,最
終的な位置誤差も車輪半径程度であることが判明する.
5.6.2
サイドフォースに関する比較
表5.3に全輪動力学モデルより計算された各車輪のサイドフォースの値を示す.Bicycle
モデルに基づいた場合,サイドフォースの誤差が非常に大きくなってしまうことは既に
第2章において触れた.しかしながら同表より全輪動力学モデルに基づくと,実験値と
計算値に2 [N]前後の誤差を持つことが分かる.この2 [N]程度の誤差は土壌の状態や車輪
表面の形状の違いによって生じたと考えられるため,全輪動力学モデルは各車輪に生じ
るサイドフォースを概ね推定することが可能であると言える.
5.7
まとめと今後の課題
本章において提案した全輪動力学モデルを用いることによって,ローバーの走行軌跡
の推定が可能であることを示した.また各車輪に生じる力学関係も同モデルを使用する
ことにより表現が可能となった.
本章で示したシミュレーションは基礎的なものであるが,ローバーのステアリング特
- 117 -
第5 章
車輪力学モデルを用いた動力学シミュレーション
t = 1 [s]
t = 1 [s]
t = 5 [s]
t = 5 [s]
t = 9 [s]
t = 9 [s]
Bicycle model (Yellow)
Experiment (Red)
All-wheel dynamics model (Blue)
Experiment (Red)
t = 13 [s]
t = 13 [s]
(a) Bicycle model vs. Experiment
(b) All-wheel dynamics model vs. Experiment
図 5.17: Comparison of the rover motion by the use of the computer graphics
- 118 -
5.7 まとめと今後の課題
性や走行軌跡を表現するうえでは,十分な精度および信頼性があると言える.特に本シ
ミュレーションでは,テラメカニクスに基づいた車輪モデルを用いて車輪と土壌との接
触問題を扱っているため,従来のバネ・ダンパ系で表現される車輪接触力学よりも土壌
の特性を加味した,より詳細な力学計算がおこなえると考えられる.また本シミュレー
ションとステアリング実験結果およびBicycleモデルとを比較検討することにより,全輪
動力学モデルの有用性についても示すことができた.
全輪動力学モデルを用いたシミュレーションに関する検討課題について言及すると,
まず本研究ではステアリング角度を一定に固定して計算をおこなったが,実際のミッ
ションを考慮すると断続的にステアリングをおこなうことが考えられる.よって,逐次
ステアリング角が変化した場合にローバーがどのような挙動を示すか,どのような力を
生じるかについてもシミュレーションをおこなう必要があると思われる.また現段階で
は平坦な地形のみを走行するローバーのシミュレーションのみを扱っているため,凹凸
のある地形や場所によって土壌パラメータが異なる地表などの地形モデルを取り入れた
シミュレーションの開発が必須である.
以上の検討課題を克服したうえで,ローバ―の軌道追従性や挙動解析などのシミュ
レーションを全輪動力学モデルに基づいておこなうことが可能であると考える.
- 119 -
第 6章
結論
本研究では,月・惑星探査ローバーのステアリング特性に基づく走行力学解析をおこ
ない,ローバーの足元部分である車輪に生じる力について明確にし,新しい車輪力学モ
デルを提案した.さらに,この車輪力学モデルを用いローバー全体の挙動を動力学的に
解析する「全輪動力学モデル」を構築した.
各章における要点を以下に概括的にまとめ,最後に本研究全体の結論と今後の展望に
ついて触れたいと思う.
第 2 章 ステアリング特性に基づく走行力学
「ニュートラルステア,アン
車輪移動体のステアリング特性について,3つの特性,
ダステア,オーバステア」があることを示した.さらに自動車工学の分野におい
ておこなわれているBicycleモデルを用いたステアリング特性の解析手法について
系統的にまとめ,ステアリング特性の評価に必要なスタビリティファクタについ
て言及した.
また本研究室において開発した4輪のローバーテストベッドを用いた不整地上のス
テアリング走行実験をおこない,先に示したBicycleモデルによる走行軌跡と実際
のローバーの走行軌跡,および車輪において生じる力について比較をおこなった.
その結果,不整地上を走行する車輪移動体に対してBicycleモデルを用いた解析を
おこなってしまうと,車輪に生じる力が小さく算出されてしまい,不十分な解析
結果を得てしまう恐れがあることが分かった.
そこで不整地におけるステアリング特性を議論するために,第3章への礎として本
研究における解析アプローチである「全輪動力学モデル」について言及した.
第 3 章 不整地におけるステアリング特性と車輪力学モデル
第3章では,まずステアリング時に車輪に発生する力,コーナリングフォースとセ
- 121 -
第6 章
結論
ルフアライニングトルクについて紹介した.次に不整地におけるステアリング特
性を議論するうえで,それぞれの車輪にどのような力が生じているかを明らかに
しなければならないため,テラメカニクスに基づいた解析をおこない不整地をス
テアリング走行する車輪の力学モデルを構築した.
車輪の走行状態を表現する重要なパラメータであるすべり率とスリップ角を示し,
車輪の応力モデルをもとに導出される車輪の力学関係について明示した.特にサ
イドフォースの定式化において車輪が沈むという現象に注目し,Hegedusの排土
抵抗推定法を応用した新しい力学モデルを提案した.
さらに本研究において構築した車輪力学モデルの数値シミュレーションをおこない,
垂直応力モデルの検討をおこなったうえで,車輪に生じる駆動力・サイドフォー
スと車輪のすべり率・スリップ角との関連性について言及した.さらに車輪に加
わる力を評価することによって,走行時における車輪の不安定な状態について定
性的に評価した.
第 4 章 月模擬砂を用いた車輪走行実験
月土壌模擬砂「月レゴリスシミュラント」を実験土壌とした走行実験について示
した.本研究室において開発した車輪実験装置を用い,まずはじめにHegedusの排
土抵抗推定法の実証実験をおこなった.その結果,発生する排土抵抗が沈下量の
二次式により表現できることが確認され,さらに過渡状態における移動速度依存
性について一次遅れ系を用いた評価をおこなった.
次にすべり率・スリップ角を任意に変化させ,車輪に発生する力等を計測し数値
計算結果と照らし合わせることによって,第3章において提案した車輪力学モデル
の正当性を明確にした.加えて,セルフアライニングトルクという車輪安定性の
評価に重要なトルクに関しても,実験から得られた知見をもとに力学モデルを構
築した.さらに車輪表面の形状を変化させた走行実験をおこない,データを比較・
検討することによって車輪表面形状が力に及ぼす影響について考察した.
第 5 章 車輪力学モデルを用いた動力学シミュレーション
第3章において提案した車輪モデルによって導出される力学関係を用いて,4輪ロー
バーの動力学モデルを構築し,新しい挙動解析手法として「全輪動力学モデル」
を構築した.
この手法を用いてローバーのステアリング角が変化した場合および重力環境が変
化したケースについてシミュレーションをおこない,そのステアリング特性につ
いての評価をおこなった.またステアリング実験の走行軌跡および力学関係との
比較検討によって,全輪動力学モデルの信頼性についても示すことができた.
- 122 -
第6 章
結論
本シミュレーションでは,ローバーの個々の車輪に対してより厳密な走行状態の
表現が可能となり,詳細な挙動解析もしくは軌道追従制御への応用を示唆するも
のであると考えられる.
車輪走行実験において得られた結果と数値シミュレーション結果を比較すると概ね
データは一致していた.しかしながら,すべり率が大きい状態,つまり走行状態が不安
定な場合は実験値の偏差も比較的顕著である.本研究では走行後の土壌の状態は考慮し
なかったが,FEM解析などを用いた高精度の土壌解析をおこなうことによって走行時の
土壌評価も可能であると考えられる.特に前輪の轍上を後輪が走行するなど,走行土壌
が不均質な状態の場合においてどのような扱いをするべきかといった問題は,テラメカ
ニクスの分野においても未解決の領域である.
また車輪の形状によっても発生する力が走行状態によってはまったく異なることを第
4章において示した.形状に依存するファクタとして車輪に生じる応力モデルが代表的
なものとして挙げられる.車輪の形状によってはその垂直応力は非常に複雑なものとな
るため,本研究において提案したモデルが一概に適合するとは考えがたい.よって車輪
形状の依存性を加味した力学モデルの改良も必要であると考える.
全輪動力学モデルに関して,車輪に関するテラメカニクスモデルとローバー全体に関
するダイナミクスモデルを統合化することによって非常に興味深いシミュレーションモ
デルを構築することができたと考えられる.今後,このシミュレーションモデルを応
用する手段として,地形モデル(起伏のある地形,不均質な土壌の模擬など)を本シミュ
レーションへ加味することによって,実世界により近いシミュレーションをおこなうこ
とが可能であると思われる.このようにして構築されたシミュレーションモデルを用い,
ローバーの正確な挙動解析をおこなうことによって,ローバーを設計する上での走行性
能予測や不整地において安定した走行をおこなうための制御則の構築などへの応用が期
待できる.
- 123 -
謝辞
本研究は2003年4月から2005年2月までの期間にわたり,東北大学大学院工学研究科
航空宇宙工学専攻 吉田研究室においておこなわれた.
本研究をおこなうにあたり懇切丁寧なる御指導をいただきました指導教員である吉田
和哉教授,ならびに審査をしていただきました内山 勝教授,江村 超教授に深く感謝い
たします.
特に吉田 和哉教授は,研究への取り組み方や問題点へのアドバイスといった細部に
わたって多大なる御指導御鞭撻を頂き,筆舌に尽くしがたい感謝を感じております.
また本研究室の中西 洋喜助手には,動力学シミュレーションの構築および実験装置
制御系の開発の際に多くの御助言を頂き,感謝の念にたえません.
The University of New South Walesの古川 知成講師には,グローバルな視点から本研
究に対し様々な御指摘を頂き,また研究のあり方を示して頂き非常に感謝しております.
実験装置の車輪の製作に関して本田精機株式会社の大森 良次氏に御協力いただき感
謝いたします.
本研究室の佐藤 洋一郎氏は私と同学年であり,互いの研究に関する多くの議論を通し
て研鑚しあい非常に有意義な研究をおこなうことができ,大変感謝しております.
また本研究室大学院生の三輪 章子氏にも,動力学シミュレーションの構築を含め本
研究に関する多くの議論に積極的に参加して頂き非常に感謝しております.
さらに実験装置の製作において御尽力頂いた同学部生の水内 健祐氏,同研究生のDaniel
Schott氏,本論文のAbstractの校正や添削をはじめ,学会論文等の英語に関して多くの
御指摘を頂いた同大学院生のMarco Antonio Chacin Torres氏,Andres Esteban Mora
Vargas氏に拝謝するとともに,素晴らしい雰囲気を作り出して頂いた本研究室の皆様に
この場を持って感謝の意を示させて頂きます.
最後に,私の充実した日々の生活を支えて頂いた両親に感謝いたします.
2004年2月1日
石上 玄也
- 125 -
参考文献
[1] 狼 嘉彰,若林 靖史、足立 忠司:“ 月・火星探査ローバ ” 日本ロボット学会誌 Vol.12
No.7 pp.979-985, 1994
[2] http://www.solarviews.com/eng/history.htm
[3] http://marsrovers.jpl.nasa.gov/gallery/press/opportunity/20040302a.html
[4] http://marsrovers.jpl.nasa.gov/gallery/press/opportunity/20040318a.html
[5] 宇宙航空研究開発機構:“ JAXAシンポジウム概要報告 月で拓く新しい宇宙開発
の可能性と日本 ” 宇宙航空研究開発機構広報部,2004
[6] SELENE-B 検討グループ:“ 月面探査ローバーの検討・技術課題 ”,2002
[7] Bekker, M. G. : “ OFF-THE-ROAD LOCOMOTION ”, The University of Michigan Press, Ann Arbor, 1960.
[8] Wong, J. Y.:“ Theory of Ground Vehicles ”, John Wiley & Sons, 1978,
[9] 金森 洋史,笈田 昭,中嶋 洋,藤井 勇人,健山 和由,深川 良一:“ 月面ローバー
開発におけるテラメカニックス研究 ”, 第45回宇宙科学技術連合講演会,2001
[10] 金森 洋史,飯島 純一,久保田 孝,吉光 徹雄,松本 幸太郎,若林 幸子,黒田 洋
司,國井 康晴:“ 月面小型ローバの走行システム ”, 第46回宇宙科学技術連合講演
会,2002
[11] 三田村 樂三:“ 車はなぜ曲がるか? - 限界コーナリングのダイナミクス- ”,山海
堂,2001
[12] 自動車技術会・安部 正人,大沢 洋 編:“ 自動車技術シリーズ[4] 自動車の運動性
能向上技術 ”,朝倉書店,1998
[13] 室 達郎 :“ オフロードタイヤ工学 ”,テラメカニックス研究会,1999
[14] 田中 孝,笈田 昭 :“ 車両・機械と土系の力学 - テラメカニックス ”,学文社,1993
[15] レイモンド ヤン, ニコラス スキアダス, エザット ファタ, 北野 昌則 (翻訳) : “
オフロード車両の走行力学 ”,技術教育研究会,1986
- 127 -
参考文献
[16] 室 達郎 :“ テラメカニックス - 走行力学 ”,技報堂出版,1993
[17] Iagnemma, K., and Dubowsky, S.:“ Mobile Robot in Rough Terrain ”, Springer
Berlin Heidelberg New York, 2004
[18] Iagnemma, K., Shibly, H., Dubowsky, S. : “ On-Line Traction Parameter Estimation for Planetary Rovers ” Proc of the 2002 IEEE Int. Conf. on Robotics and
Automation, 2002.
[19] Grand, C., Amar, F. B., Bidaud, P., :“ A Simulation System for Behaviour
Evaluation of Off-road Mobile Robots ” 4th International Conference on Climbing
and Walking Robots, 2001
[20] 景山 克三:“ 自動車の操縦性・安定性 ”,山海堂,1992
[21] 田中 孝:“ トラクタ駆動輪の滑り沈下について(第1報) ”, 農業機械学会誌, 35(4),pp.495-504,
1973
[22] Wong, J. Y., Reece, A. R.:“ Prediction of Rigid Wheel Prefoemance Based on
the Analysis of Soil-Wheel Stresses Part I, Preformance of Driven Rigid Wheels
”, Journal of Terramechanics, vol.4, 1967
[23] LIU, C. H., and WONG, J. Y.:“ NUMERICAL SIMULATIONS OF TIRE-SOIL
INTERACTION BASED ON CRITICAL STATE SOIL MECHANICS ”, Journal
of Terramechanics, vol.33, 1996
[24] 渡辺 敏暢:“ 月・惑星探査ローバーの走行力学解析と制御への応用 ”, 東北大学大
学院修士論文 2003
[25] Janosi, Z., and Hanamoto,B.:“ The analytical determination of drawbar pull as
a funcition of slip for tracked vehicle ”, Proc, 1st Int. Conf. on Terrain-Vehicle
Systems, Torio, 1961
[26] Yoshida, K., and Ishigami, G.:“ Steering Characteristics of a Rigid Wheel for
Explaration on Loose Soil ”, Proc of the 2004 IEEE Int. Conf. on Intelligent Robots
and Systems, 2004.
[27] Bekker, M. G.:“ Introduction to Terrain-Vehicle Systems ”, The University of
Michigan Press,1969
[28] 杉山 昇 :“ 建設機械と土の諸問題 ”,鹿島出版会,1982
[29] 水野 昇幸:“ 車輪型探査ローバーの月面踏破性能に関する研究 ”, 東北大学大学院
修士論文 2004
[30] 清水建設:“ 模擬月土壌の諸性質 ”, 2003
- 128 -
参考文献
[31] Deans, M. C., Foessel, A. D., Fries, G. A. , LaBelle, D., Lay, N. K., Moorehead,
S., Shamah,B., Shillcutt, K. J., Whittaker, W.:“ ICEBREAKER : A LUNAR
SOUTH POLE EXPLORING ROBOT ”, CMU-RI-TR-97-22, The Robotics Institute Carnegie Mellon University, 1996-97
[32] 江守 一郎,斎藤 孝三,関本 孝三:“ 模型実験の理論と応用 ”, 技報堂出版,2000
[33] Shikanai, T., Hashiguchi, K., Nohse, Y., Ueno, M., Okayasu,T.:“ Precise measurement of soil deformation and fluctuation in drawbar pull for steeland rubber-coated
rigid wheel ”, Journal of Terramechanics, vol.37, 2000
[34] http://www.astro.mech.tohoku.ac.jp/spacedyn
[35] 吉田 和哉,渡辺 敏暢,水野 昇幸,石上 玄也:“ 月探査ローバーテストベッド「Lunar
Rover Prototype」の開発 ”, 日本ロボット学会,第21回学術講演会,2003
- 129 -
付録A
ローバーテストベッドの詳細
A.1
はじめに
不整地を移動することを目的としたロボットは大きく二つに分けられる.一つは車輪
型ロボットであり,もう一つは脚型の移動ロボットである.それぞれの特徴は,まず車
輪型は機構が単純でありその為に耐久性が高く,さらに移動速度が速い・エネルギ効率
が良い等の特徴がある.また脚型の利点は不整地走破性能が高く,車輪で移動不可能な
領域を探査することも可能なことが挙げられる.これらの優位性は一長一短であるが月
や惑星での探査を考えた場合,車輪型の特徴がより探査ミッションへの適合性が高いと
言われており,一方,脚型のロボットが宇宙で探査した例はない.
本研究室では,不整地における走破性能の研究をおこなうにあたって,車輪型のロー
バーテストベッドを開発した[35].本ローバーは展開型のリンクを持つとともに,走破
性能が高い「ボギーリンク」と呼ばれるパッシブサスペンションを特徴とする.本付録
ではローバーテストベッドの紹介をおこなう.
A.2
ローバーテストベッド概要
一般的に,様々な条件下においてローバーの車体はより大きい方が走破性能の点では
有利であることが知られている.しかし惑星探査においてペイロード搭載のための空間
の制限があり,そのためローバーはコンパクトにする必要がある.この矛盾した条件を
満たすため,限られた大きさの中でできるだけ大きいものを搭載するためには展開型の
ローバーが有効である.
本研究室において開発したローバ−は4輪の展開型のローバーである.ローバーの写
- 131 -
付録A
ローバーテストベッドの詳細
(a) Rover prototype
(b) w/ camera and F/T sensor
図 A.1: Snapshot of the rover
表 A.1: Size of the rover
収納時 展開後
全長[m]
0.62
0.95
全幅[m]
0.53
0.70
高さ[m]
0.46
0.56
真を図A.1に示す.同図(a)は開発初期のものであり,(b)はレスキューロボットへの適応
を見据え外界センサであるカメラ数台を搭載し,また移動時に加わる力を計測するため
車輪上部にF/Tセンサを取り付けたものとなっている.
ローバーの4つの車輪は,伸縮するリンク(以下ストラット)の先端に取り付けられてお
り,ストラットの長さは,収納時 0.32 [m],展開時 0.43 [m] である.収納時および展開
時の最大寸法を 表A.1 に示す.
ステアリング部分は車輪上部に取り付けられており,ウォームギアとウォームホイー
ルを用いる機構によって,車輪部分から伝達されるバックドライブに対し非常に強固な
ステア角の位置決めをおこなうことが可能となっている.
また,ローバーの本体部分(以下ボディ)は,0.35 × 0.45 × 0.20 [m] の直方体であ
り,ストラットと車輪で構成されるサスペンションメカニズムが自由回転するピンジョ
イントによって左右に取り付けられている.これはSojournerのロッカーボギー機構を
参考にしたパッシブサスペンションである.
- 132 -
A.2 ローバーテストベッド概要
strut
Nock pin
strut
図 A.2: Strat mechanism
A.2.1
展開メカニズム
伸展式のストラットは,受動的な直動リンクであり,中にノックピンが入っている.
展開時には,車輪の駆動力によって伸展し,伸びた状態で固定される(図A.2).そのス
トラットを利用した展開のシーケンスを 図A.3 に示す.
1. ステアリング軸を回転させ,車輪を外側に引き出す.
2. 車輪を前進(前方)および後進(後方)させることにより,ストラットを伸展させる.
3. 伸展したストラットがノックピンによってロックされる.
ストラットが伸展することによりホイールベースが長くなり,走行安定性が向上する.
ストラットは斜めに配置されているため,前後方向だけでなく,高さ方向にも伸展され
る.このため伸展時にはグランドクリアランスも大きくなり,地面起伏や石などの障害
物がボディに接触する可能性を低くすることができる.
A.2.2
サスペンションメカニズム
ローバーが不整地を走行する際に,各車輪が適応的に地面と接地するためにはサスペ
ンション機構が不可欠である.一般的な自動車等には,バネ・ダンパ系によるサスペン
ションが使われているが以下のような短所が存在する.
バネ・ダンパ系によるサスペンション
• 各車輪を独立に支えるサスペンションでは,タイヤ直径の1/2以上の障害物を乗り
越えることができない.
• 月のように重力が小さい環境では,バネの働きによってローバーが大きくジャン
- 133 -
付録A
ローバーテストベッドの詳細
1.
2.
3.
図 A.3: Expansion sequence
- 134 -
A.2 ローバーテストベッド概要
T1
F4
F1
T2
Obstacles
F2
F3
図 A.4: Mechanism of boggy suspension
図 A.5: Explaination of boggy suspension
プしてしまう危険性がある.
• 登攀時には,後輪を支えるバネが沈み込んでしまい,各車輪の接地荷重にアンバ
ランスを生じ,空転やスタックの原因になりやすい.
本研究で設計したサスペンションは,ストラットを介して前後の車輪は剛に連結され
ている.この連結リンクをボギーリンクと呼ぶ.左右のボギーリンクは中心軸周りに自
由回転することができる.その様子を 図A.4 に示す.このようなボギーリンクを採用す
ることにより,前輪が障害物に乗り上げ,力F1が加わる時,後輪には下向きに力F2を生
じ,前輪を持ち上げる効果が得られ,同時に後輪の接地力が増す.
ボギーリンクの詳細を図A.5に記す.左右の菱形の形状をしているリンクがボギーリ
ンクである.このボギーリンクの回転軸の下側には,ワイヤー取り付け部がある.ここ
からワイヤーを介して左右のリンクを連結することにより,下に示すプロセスによりサ
スペンションとして機能する.また,この構造はボディ部が回転しないように固定する
役割も担う.
1. 図A.5のA点が地形形状などにより持ち上げられる.
- 135 -
付録A
ローバーテストベッドの詳細
2. B点が矢印方向に引っ張られる.
3. ワイヤーでつながっているC点も移動する.
4. D点が下げられる作用が生じる.
ボギーリンクのの左右のリンクは,回転角をそれぞれ θ1 , θ2 とすると,
θ1b = −θ2b
(A.1)
の関係を満たす.ここでθ1b ,θ2b はボディ座標系から見た左右リンクの回転角である.
またボディの角度 θ0 について
θ0i =
θ1i + θ2i
2
(A.2)
となるような差動(ディファレンシャル)機構を設定する.ここでのθ0i ,θ1i ,θ2i は,慣性
座標形から見たそれぞれの値である.このボギーリンク・サスペンション機構の効果と
して,大きく以下の3つが考えられる.
ボギーリンク・サスペンション
• 前後の車輪を連結支持することにより,タイヤ直径の1/2以上の障害物を乗り越え
ることができるようになる.
• 静的,準静的な状況において,4つの車輪が常に地面に接地することが可能である.
• バネを使っていないので,各車輪が接地荷重に応じて浮いたり沈んだりすること
がない.
A.2.3
システム概要
本ローバーは,走行用モータ4個,ステアリングモータ4個の計8個のモータを有し,
LaptopPCからのコマンドに対しモータコントローラ・ドライバを介して制御される.
各モータの制御はモータコントローラ内においてローカルなPID制御をおこなう.
またオペレータからジョイスティックによって入力された走行コマンドを,ワイヤレス
LANを介してローバーに搭載されたLaptopPCへ送信し,それぞれのモータを制御する
ことも可能となっている.さらにオペレータはローバーに搭載された2台のWebCamara
の画像を受信し,走行の様子を目視しながら遠隔操作することができる.ローバーのシ
ステム緒言を表A.2に示す.
- 136 -
A.2 ローバーテストベッド概要
Rover
Operator
F/t sensor
Web Camera
Joystick
Laptop PC
4
Laptop PC
Motor controller
Motor controller
Wireless LAN
Motor driver
Steering motor
4
4
Motor driver
4
Driving motor
4
Battely
)
(12V
図 A.6: System diagram of rover test bed
表 A.2: System specification of the rover test bed
LaptopPC
IBM ThinkPad X24(Windows2000, Pentium 3 1.04GHz)
Motor controller
iXs Research 社製・iMCs01
Motor Driver
iXs Research 社製・iMDs03
Steering motor
escap社製 28L28 11W (ギア比 180:1)
Driving motor
MAXSON社製 DC-MOTOR RE-max29 22W (ギア比 411:1)
Battely
完全密封型鉛蓄電池 12V 8Ah
F/Tセンサ
ATI社製6軸力覚センサ(Gamma SI-130-10)
- 137 -
© Copyright 2026 Paperzz