社団法人 電子情報通信学会
THE INSTITUTE OF ELECTRONICS,
INFORMATION AND COMMUNICATION ENGINEERS
信学技報
TECHNICAL REPORT OF IEICE.
リンクディスジョイント経路計算の高速解法の一検討
DAPDNA-2 による並列マルチレイヤ経路計算
木原 拓†
清水 翔†
高 山†
荒川 豊†
山中 直明†
† 慶應義塾大学理工学部情報工学科 〒 223–8522 神奈川県横浜市港北区日吉 3–14–1
E-mail: †{kihara,shimizu,gao,arakawa,yamanaka}@yamanaka.ics.keio.ac.jp
あらまし
K Disjoint-Paths Pairs (KDPPs) は,耐障害性を確保するためのリンクディスジョイント経路を求めるア
ルゴリズムとして広く使用されているが,最適解 (合計コストが最小となるリンクディスジョイント経路の組) が得ら
れない場合が存在することが知られている.しかし,最適解が得られない状況について,詳しく言及している過去の
研究はほとんど存在しない.そこで,本稿では,計算機シミュレーションを用いて様々なトポロジにおける KDPPs の
解の精度を定量化する.さらに,並列リコンフィギャラブルプロセッサに適したマルチレイヤを考慮するリンクディ
スジョイント経路探索アルゴリズムも提案し,提案アルゴリズムが KDPPs と比較して計算クロック数を最大で約 99.
6%減少させることを示す.
キーワード
リンクディスジョイント経路,並列リコンフィギュラブルプロセッサ,DAPDNA-2,K Disjoint-Paths
Pairs
A Study on High Speed Method of Link-Disjoint Path Calculation
A Parallel Multi-layer Path Calculation on DAPDNA-2
Taku KIHARA† , Sho SHIMIZU† , Gao SHAN† , Yutaka ARAKAWA† , and Naoaki YAMANAKA†
† Dept. of Information and Computer Science, Faculty of Science and Technology, Keio University
Hiyoshi 3–14–1, Kohoku-ku, Yokohama-shi, Kanagawa, 223–8522 Japan
E-mail: †{kihara,shimizu,gao,arakawa,yamanaka}@yamanaka.ics.keio.ac.jp
Abstract K Disjoint-Paths Pairs (KDPPs) is widely used as a link-disjoint path search algorithm to keep survivability. It is known that KDPPs often fails to obtain optimal solution. However, there is few resarches which
discuss that issue. Therefore, the accuracy of KDPPs on various topology is investigated in this paper. We propose
a parallel link-disjoint path search algorithm for multi-layer networks. Simulation results show that the calculation
time of the proposed algorithm decreases by 99.6% compared to KDPPs.
Key words Link-disjoint paths, Parallel Reconfigurable Processor, DAPDNA-2,K Disjoint-Paths Pairs
1. は じ め に
近年,ネットワークの高速・大容量に伴い,ネットワーク
を使用しない 2 つの経路の組をリンクディスジョイントな経路
の組と呼ぶ.通常,リンクディスジョイントな経路の組を算出
する方法として,グラフアルゴリズムに基づく方法 [1], [2] と,
の信頼性が重要になり,Next Generation Network (NGN) の
Integer Linear Programming (ILP) に基づく方法 [3], [4] の 2
ように Quarity of Service (QoS) に焦点を当てたネットワーク
種類が挙げられる.しかしながら,上記の 2 つの方法は計算時
が注目されている.耐障害性の確保は QoS を保障する上での要
間と解の精度の間でのトレードオフがある.グラフアルゴリズ
素技術である.WDM ネットワークでは,リンクやノードの故
ムに基づく方法の場合,ILP と比較して計算時間は早いが,最
障による通信の切断は大量のデータロスを引き起こすため,耐
適な解が得られない場合が存在する.一方,ILP に基づく方法
障害時の予備経路をどのように確保するかは重要な課題である.
の場合,最適な解を算出することが可能だが,ネットワークの
耐障害時の予備経路は,主経路と同じリンクを使用しないと
サイズが大きくなると計算量が急激に増大し,有限時間内に計
いう条件を満たす必要がある.このような,互いに同じリンク
算が完了しない.そのため,実際にはグラフアルゴリズムに基
—1—
2
Pair 1
B
Pair 2
C
1
3
Source
Destination
1
P1
P2
A-B-C-D-F Cost 5
A-E-F
Cost 11
P3
A-B-C-F Cost 6
P4
A-E-D-F Cost 6
4
A
1
F
2
9
3
3
1
4
A
Dest Source
1
F
1
2
3
3
1
4
A
D
E
C
B
1
Source
2
2
C
B
D
1
Dest
F
D
9
E
2
3
9
E
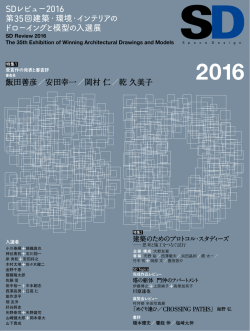
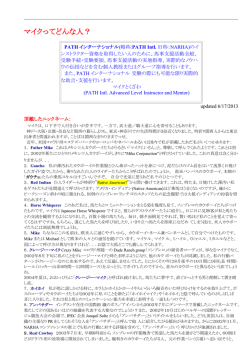
図 1 6 ノードネットワーク
図 2 KDPPs の解 (左) と最適解 (右) の比較
づく方法を用いる場合が多い.
グラフアルゴリズムに基づく方法として,従来は,最短経
KDPPs を実行すると,P1 : A-B-C-D-F および P2 : A-E-F の
路探索アルゴリズムであるダイクストラ法 [5] を基にした,K
合計コストが 16 の互いにリンクディスジョイントな 2 本の経
Disjoint-Paths Pairs (KDPPs) アルゴリズムが用いられてい
路を発見することが出来る.しかしながら,図 2 に示すように,
た.KDPPs は前述の通り,ネットワークによって最適な解が
P3 : A-B-C-F および P4 : A-E-D-F のように,KDPPs で求め
求まらない場合が存在し,最悪の場合,解そのものが求まらな
た経路より合計コストの小さいリンクディスジョイント経路が
い,いわゆるトラップ問題 [8] になることが知られている.し
存在する場合がある.KDPPs では,最初に最短経路を選択す
かし,最適解が求まらない状況について,詳しく言及している
るため,この経路の組を発見することは出来ない.さらに,既
過去の研究はほとんど存在しない.
に決定した経路で使用されたリンクをネットワーク中から削除
そこで,本論では,計算機シミュレーションを用いて,様々
なトポロジにおける KDPPs の解の精度を求め,定量化する.
し,2 番目以降の経路を計算するため,トラップ問題になる場
合が存在する.
さらに,IPFlex 社が開発した並列リコンフィギャラブルプロ
セッサ DAPDNA-2 [7] に適した,マルチレイヤの情報を考慮
3. 特性評価:KDPPs
する新たな高速リンクディスジョイント経路探索アルゴリズム
である FLDPA(Fast Link Disjoint-Paths Algorithm) を提案
3. 1 KDPPs の解の精度
する.FLDPA はネットワーク中の複数の経路を並列に探索し,
ラ ン ダ ム に 発 生 さ せ た 1000 個 の ト ポ ロ ジ に つ い て ,
探索した経路の中からマルチレイヤコストの低い最適な経路の
KDPPs(K=2) で求めた解と最適解を比較した.各トポロジ
組を算出する.さらに,FLDPA が KDPPs と比較して高い解
について,ノード数は 15,平均リンク次数を 3, 各辺のコス
の精度を持ち,計算クロック数を大幅に減少させることを示す.
トは 1 から 15 の一様分布とし,始点 S = {0, 1, ..., 14},終点
D = {0, 1, ..., 14} の全組み合わせ (S ≠ D) に対して KDPPs
を実行した.最適解は,ネットワーク中の全経路を抽出し,そ
2. K Disjoint-Paths Pair (KDPPs)
の中から合計コストの最も低い経路ペアを選択する総当り方式
リンクディスジョイントな経路の組の選択法として KDPPs [9]
により算出した.
がある.KDPPs は,ダイクストラ法を用いて,始点 S と終点
上記のシミュレーションの結果より,トラップ問題になる場
D 間の k 本の互いにリンクディスジョイントな経路を決定する
合も含め平均 11%の割合で KDPPs が最適解を得られないこ
アルゴリズムである.G(V, E) をネットワークトポロジを表す
とが分かった.同様にトラップ問題になる割合は平均 1%であ
グラフとする.ここで,V はネットワーク中のノードの集合を
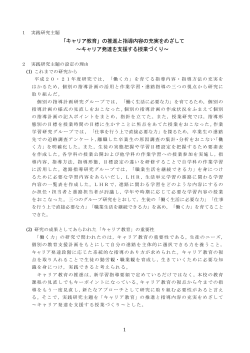
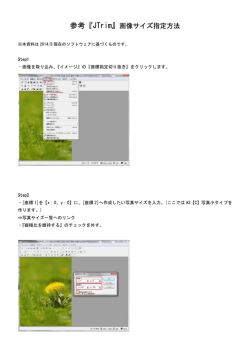
ることが分かった.図 3 に最適解が得られない割合に対するヒ
表し,E はネットワーク中のリンク集合を表す.KDPPs の詳
ストグラムを示す.図 3 より,1000 トポロジ中で,最適解が
細を以下に示す.
得られない割合が 5∼10%の場合が多く,次いで 10%∼15%の
場合が多い.30%を超えるトポロジは 40 程度である.しかし
Step1) ダイクストラ法を用いて始点 S から終点 D 間の最短
ながら,最大で 47.9%の割合で最適解が得られないトポロジも
経路 Pi を決定する.
存在し,このようなトポロジにおいては,KDPPs は有効なア
Step2) G(V, E) から Pi に属する辺 Ei ⊂ E を全て除去する.
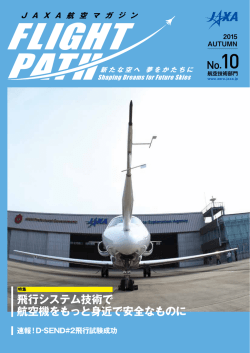
ルゴリズムとはいえない.次に,トラップ問題になる割合をヒ
Step3) Step1,Step2 を i = 1, 2, ..., k について繰り返し,P1
ストグラムで表したものが図 4 である.図 4 より,トラップ問
から Pk までの k 本のリンクディスジョイントな経路を決定す
題になる割合が 0%∼5%のトポロジが 800 以上あり,大半を占
る.ただし,Step1 において,ダイクストラ法を実行しても経
めている.しかしながら,トポロジの数自体は少ないものの,
路が得られない場合はアルゴリズムを終了する.
特定のトポロジにおいては 20%を超える確率でトラップ問題に
なり,最も確率の高いトポロジでは,25.7%の割合でトラップ
図 1 に 示 す 6 ノ ー ド か ら 成 る ネット ワ ー ク に お い て ,
問題になり,KDPPs では解を求めることが出来なくなってし
—2—
Rate of obtain optimum solution (%)
Number of Topologies
100
260
240
220
200
180
160
140
120
100
80
60
40
20
0
90
KDPPs’s average
80
70
60
50
40
30
20
10
0
0
0 10 20 30 40 50 60 70
10
20
30 40 50 60 70
Limitation value : Q
80
90
100
80 90 100
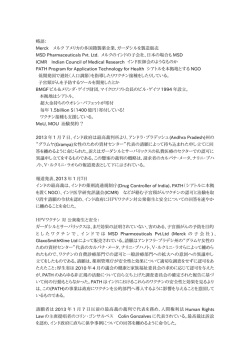
図 5 総当り方式において計算する経路数を制限した場合の解の精度
Possibility of not obtaining optimum solution (%)
図 3 KDPPs において最適解を得られないトポロジ数の分布
800
4. FLDPA (Fast Link-Disjoint Paths Algorithm)
700
4. 1 概
600
本章では,距離以外に,帯域やリンクの使用率などのマル
Number of Topologies
900
要
チレイヤの情報を考慮した,新たなリンクディスジョイント経
500
路探索アルゴリズムである FLDPA を提案する.FLDPA は,
400
経路集収フェイズと経路選択フェイズの 2 つのフェイズで構成
300
される.経路集収フェイズでは,複数の経路を同時並列的に探
200
索し,マルチレイヤを考慮した経路コストを割当てる.経路選
択フェイズでは,経路収集フェイズで収集した経路の情報を元
100
に,マルチレイヤコストの合計が最小となる最適なリンクディ
0
0 10 20 30 40 50 60 70 80 90 100
Possibility of occurrence of trap problem (%)
図 4 KDPPs においてトラップ問題が発生するトポロジ数の分布
スジョイント経路の組を算出する.
4. 2 経路集収フェイズ
FLDPA の経路集収フェイズでは,同時並列的に経路探
索を進め,どの経路がどのリンクから構成されるかを探索し,
まう.KDPPs では,ある特定のトポロジにおいて,高い確率
ネットワーク中の全経路を求める.さらに,探索が完了した経
で最適解が得られない,または,トラップ問題になることが分
路にマルチレイヤを考慮したコストを新たに割当てる.以下に
かる.
定義する変数および関数を用いて,経路収集フェイズのアルゴ
3. 2 総当り方式の計算量制限時における最適解との差
リズムを説明する.
図 5 は,3. 1 節で用いた 1000 個のトポロジにおいて,総当
り方式の計算量を制限した場合に,最適解が得られる割合がど
のように変化するかを示したグラフである.総当り方式におい
・G = (V, E)
トポロジグラフ.V :ノード E:リンクの集合
( v = {1, 2, .., n} ∈ V, eij ∈ E (i ∈ v, j ∈ v) )
て,各トポロジにおける各ペア (始点から終点) 間の全経路をコ
・P = {p1 , p2 , ..}
ストの低い順に並べ,その上位 Q%の経路を用いてリンクディ
・t = {t1 , t2 , ..}
スジョイントな経路の組み合わせを求めた.図 5 より,計算に
用いる経路を上位 30%に制限した場合においても,92%の割合
で最適解が得られることが分かる.3. 1 節より,KDPPs が最
経路の集合
pm に対応する現在探索中のリンク
(m は任意の正数,
・r = {r1 , r2 , ..}
( m は任意の正数,
tm = tij
(i ∈ v, j ∈ v) )
tm の下位ノードに到達するまでの残コスト
rm = rij
(i ∈ v, j ∈ v) )
適解を得られる割合が平均で 89% (最適解を得られない割合が
11%) であるため,総当り方式において,全経路の中からコス
Step1) 初期値として,I = (pm , tij , rij ) = {(ϕ, tSj1 , rSj1 ), (ϕ, tSj2 , rSj2 ),
トの低い上位 30%の経路を用いて組み合わせを計算をすること
...} を与える.(S は始点ノード,Sj1 , Sj2 , ... は S から出てい
により.KDPPs と同等の割合で最適解を算出することが可能
る全てのリンクを表す.)
であることが分かる.
Step2) I の 全 要 素 の tSjx (x は 任 意 の 正 数) に 対 し て ,
—3—
Multi-layer
Information
Path 1
AB
䊶䊶䊶
CF
Cost
1
䊶䊶䊶
1
05
5. DAPDNA-2 への FLDPA の実装
Bandwidth Link usage
+
ルプロセッサ DAPDNA-2 への FLDPA の実装について説明す
40%
100M
本章では,IPFlex 社が開発した並列リコンフィギャラブ
る.
5. 1 経路収集フェイズ
Path 1
AB
䊶䊶䊶
CF
Mcost
1
䊶䊶䊶
1
12
DAPDNA-2 上では,経路テーブルの代わりに図 7 に示す
ネットワーク中の全リンクをエントリとして持つビットマップ
を用いて経路収集フェイズを実行する.
図 6 マルチレイヤコストの付加
DAPDNA-2 は毎クロックごとに現在探索位置を 1 コスト分
rSjx = rSjx − 1 し,始点 S と接続されている各リンクに
更新し,全てのビットマップについて更新および複製を繰り返
おける現在探索位置を 1 コスト進める.
して経路を同時並列的に探索する.現在探索位置が新たなノー
Step3) I の あ る 要 素 の 現 在 探 索 位 置 が ノ ー ド j
ドに到達した場合,該当するビットマップの,通過したリン
に 到 達 し た 場 合 ,す な わ ち rSjx
クに対応するビットを”0”から”1”へと変更し,図 7 のように,
=
0 ならば,
(pmx , tSjx , rSjx ) において,tSjx を pmx に加える.さらに I
ビットマップを現在の状態のまま,分岐の数だけ複製する.終
に {(pmx , tjl1 , rjl1 ), (pmx , tjl2 , rjl2 ), (pmx , tjl2 , rjl2 ), ...} を加え
点ノードに接続されているリンクのビットが立ったビットマッ
る.(jl1 , jl2 , ... は j から出ている全てのリンクを表す.)
プは,マルチレイヤコストを算出した後に,経路として管理さ
Step4) I の全要素の tij について,j = D ∧ riD = 0
(D
は終点ノード) になるまで Step2 および Step3 の操作を繰り
返す.ただし,経路探索においてループを防止するため,同じ
ノードに 2 回以上到達した経路は I から除外する.
れる.例えば,図 8 中の経路 1 は,リンク AB,BC,CD,CF
を通るコスト 5 の経路,経路 2 は,AB,BC,CF を通るコス
ト 6 の経路であることがそれぞれのビットマップから分かる.
最終的に,終点ノードにおいて規定数の経路が集まるか,ある
いは,規定数の経路がネットワーク中に存在せずに一定クロッ
条件を満たして全経路の探索が終了した場合,図 6 に示す
ように,各経路にマルチレイヤコストを付加する.マルチレイ
ヤコストとは,距離 (コスト) と帯域やリンク利用率を基に算出
される総合的なコストである.OSPF パケットを使用して収集
した帯域およびリンク利用率とコストを重み付けし足し合せる
ことによって,マルチレイヤコストとする.全ての経路のマル
チレイヤコストの算出が終了すると,FLDPA は経路選択フェ
イズに移行する.
4. 3 経路選択フェイズ
経路選択フェイズでは,経路集収フェイズで収集した経路
の中から,全てのリンクディスジョイント経路の組を算出する.
そして,その中から合計マルチレイヤコストが最も低い経路の
組を選択する.アルゴリズムの詳細を以下に示す.
クが経過した場合,DAPDNA-2 は経路収集フェイズを終了す
る.経路収集フェイズでは,1 クロック毎に現在探索位置を 1
コストずつ更新するため,終点ノードにおいて収集される経路
のコストは,このフェイズが開始されてから経過したクロック
数と等しい.例えば,フェイズ開始から 10 クロック後に終点
ノードで収集される経路のコストは 10 になる.そのため,こ
のフェイズでは,ネットワーク中に存在する経路を,コストの
小さい順に集めることができる.
5. 2 収集経路数の制限による高速化
経路収集フェイズにおける計算時間の短縮のため,収集
する経路の数を全ノードにおいて αlimit に制限する.例えば,
αlimit を 30 にセットした場合,各ノードにおいて,31 番目以
降に到着したビットマップを全て破棄する.この方法により,
DAPDNA-2 は,全経路の探索終了を待たずして,経路選択フェ
Step1) P の中から k 個を選び,Cm (P(1) , P(2) , ..., P(k) ) とす
る. (P(k) は Cm における k 番目の要素).
Step2) Cm において,(P(1) ∩ P(2) ∩ ... ∩ P(K) ) を求める.
(P(1) ∩ P(2) ∩ ... ∩ P(K) = ϕ) ならば,P(1) から P(k) までの k
個の経路は全て互いにリンクディスジョイントであるので,Cm
をリンクディスジョイント経路の集合 A に加える.
Step3) Step2 の操作を P の全組み合わせについて行う.
Step4) A の中から最小コストの Coptimum を選択する.
イズに移行することが可能になり,計算実行時間を大幅に短縮
することが可能である.しかしながら,制限による影響は大き
く,αlimit が小さい値の場合は,経路選択フェイズにおいて,存
在するはずのリンクディスジョイント経路の組を算出できなく
なる可能性がある.したがって,3. 2 節に示すように,例えば,
90%の精度で最適解を求めたい場合,収集する経路の数を全経
路数の上位 30%に制限するというように,適切な αlimit の値を
設定する必要がある.
5. 3 経路選択フェイズ
DAPDNA-2 上では,複数の経路の組についての AND 演
算を同時並列的に行うことにより,リンクディスジョイントな
—4—
AB
Path 1
BC
1
䊶䊶䊶
CD
0
0
CF
Cost
0
䊶䊶䊶
Path 1
Path 2
Path 3
Path 4
01
Duplicate
At Each Node
Path 1
Path 2
AB
BC
CD
䊶䊶䊶
CF
Cost
1
0
0
䊶䊶䊶
0
01
AB
BC
CD
䊶䊶䊶
CF
Cost
1
0
0
䊶䊶䊶
0
01
図7
Path 1
Path 2
AB
BC
CD
CE
DE
EF
Mcost
1
0
1
0
1
0
1
0
0
0
1
1
0
1
0
1
1
1
0
0
1
0
1
0
10
15
20
30
AB
BC
CD
CE
DE
EF
1
0
1
0
0
0
0
1
1
1
1
0
ビットマップの複製
Parallel Search with Multi Paths
2
0
0
1
0
Not link-disjoint pair
BC
CD
䊶䊶䊶
CF
Cost
1
1
1
1
1
0
䊶䊶䊶
䊶䊶䊶
1
1
05
06
0
0
1
1
09
Destination
9
E
AB
Path 1
Path 2
3
Candidate Paths
F
2
0
䊶䊶
1
D
Source
0
3
1
4
A
Result
C
1
10
15
Execute
“AND” Operation
䊶䊶 bitmap
B
Mcost
Path n
䊶䊶䊶
図9
ディスジョイント経路選択の例
番目にコストの高い経路は,最悪の場合で,2L(αlimit − 1) ク
ロックを足したものになる.さらに,提案アルゴリズムでは,
図 8 DAPDNA-2 における FLDPA の実行
経路選択の際の AND 演算が必要であり,1 回の AND 演算に
は 3 クロックが必要であるので,k 本のリンクディスジョイン
経路の組を高速に算出する.図 9 の 4 本の経路から互いにリ
ト経路を選択する場合,経路選択全体では,3 ·α limit Ck クロッ
ンクディスジョイントな 2 本の経路を選択する場合を考える.
DAPDNA-2 は,入力された 2 本の経路 (例として経路 1 と経路
クが必要である.以上より,提案アルゴリズムの総クロック数
√
は,50 · L · 2( N − 1) + 2L(αlimit − 1) + 3 ·α limit Ck となる.
2 とする) のビットマップに対して,図 9 に示すように,AND
一方,KDPPs では,ダイクストラ法を元に計算を行うため,
演算を行う.ビットマップ AND 演算の結果において 1 つでも
クロック数はノード数の 2 乗に比例する.そのクロック数は,
ビットが立った場合,その 2 つの経路は互いにリンクディス
β · k · N 2 となる.ここで,β はダイクストラ法の計算にかかる
ジョイントではない.逆に,1 つもビットが立たない場合,そ
定数係数である.
の 2 つの経路は互いにリンクディスジョイントであることが分
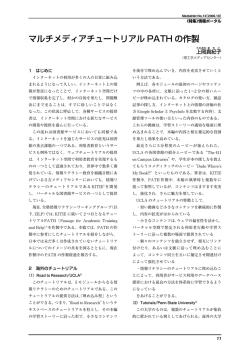
以上を元に, L = 10 の格子状メッシュトポロジにおいて,
かる.DAPDNA-2 は,上記の演算を,全ての経路の組に対し
2 本のリンク独立な経路を選択 (k = 2) するのにかかる実行ク
て同時並列的に実行し,互いにリンクディスジョイントな経路
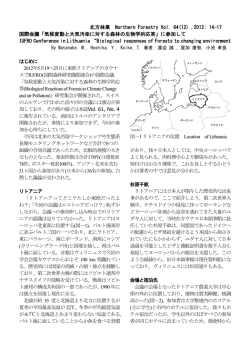
ロック数を FLDPA と KDPPs で比較したものを図 10 に示す.
の組を全て求める.そして,求めた組合せの中で最も合計マル
FLDPA に関しては,2 種類の αlimit の値を用いて実行クロッ
チレイヤコストの低い経路の組を最適解として算出する.
ク数を比較した.横軸はノード数である.図 10 より,N が大き
いほど,FLDPA の効果が大きいことが分かる.196 ノードの
ネットワークでは,FLDPA は KDPPs と比較して,99.6%も
6. 特 性 評 価
計算クロックを減少させている.KDPPs はダイクストラ法を
使用しているため,N の増加に従って実行クロックが急激に増
FLDPA において,DAPDNA-2 が,図??のデータフロー
における経路収集フェイズの繰返し処理を 1 回実行するのに必
要なクロックは 50 クロックである.収集する経路の数をコスト
の低いものから上位 Q%に制限すると,ネットワーク中の経路
の総数を R として,αlimit = R · Q/100 となる.FLDPA では
始点ノードから終点ノードまでの αlimit 本の経路を収集するま
で計算が実行される.αlimit 本の経路を収集するまでのクロッ
ク数は,最短経路から αlimit − 1 番目にコストの高い経路を収
集するまでのクロックである.今,対象とするネットワークト
ポロジを 1 辺のコストが L の格子状メッシュトポロジとした場
合,最短経路の収集にかかるクロック数は,ノード数を N とし
√
て,50 · L · 2( N − 1) になる.また,最短経路より αlimit − 1
加する.一方,FLDPA は,ネットワーク中の経路収集および
リンクディスジョイント経路算出の両演算が N の値に依存しな
いため,N の増加による実行クロック数増加が非常に小さい.
また,FLDPA は αlimit の増加による実行クロック数増加の影
響も非常に小さく,比較的規模の大きいネットワークにおいて
経路を多く収集することで,KDPPs と比較して,より高速に
最適な経路を選択することが可能である.
7. 結
論
本研究では,リンクディスジョイント経路探索アルゴリズム
KDPPs の様々なトポロジにおける解の精度を明らかにした.
—5—
[5] E.W.Dijkstra, “A note on two problems in connection with
graphs,” Numerische Mathematik, vol.1, pp.269-271, 1959.
[6] W.D.Grover, Mesh-based Survivable Networks: Options
and Strategies for Optical, MPLS, SONET/SDH, and ATM
networking. Prentice Hall PTR 2004.
[7] 末吉敏則, 天野英晴, “リコンフィギャラブルシステム,” オーム
社, 2005.
[8] W.D.Grover, Mesh-based Survivable Networks: Options
and Strategies for Optical, MPLS, SONET/SDH, and ATM
networking. Prentice Hall PTR 2004.
[9] Quoc V.Phung, Daryoush Habibi, Hoang N. Nguyen, and
Kungmeng Lo, “K Pairs of Disjoint Paths Algorithm for
Protection in WDM Optical Networks,” APCC 2005, pp.
183-187, 2005.
200000
KDPPs
FLDPA
FLDPA
execution clock
150000
α limit = 30
α limit = 80
100000
50000
0
0
50
100
150
number of node
200
図 10 KDPPs と FLDPA の計算実行クロック比較
その結果,KDPPs を用いた場合,最適解が求められない場
合,トラップ問題になる場合がそれぞれ約 11%,約 1%あるこ
とが分かった.特定のトポロジにおいて,KDPPs は,40%以
上の割合で最適解を求めることができず,25%の割合でトラッ
プ問題になることがあり,このようなトポロジにおいては有
効なアルゴリズムではないことが分かった.以上の問題を解
決するため,本研究では,並列リコンフィギャラブルプロセッ
サ DAPDNA-2 を用いてマルチレイヤの情報を考慮したリンク
ディスジョイント経路を高速に探索することが可能なアルゴリ
ズムである FLDPA を提案した.FLDPA において,収集する
経路数を表す αlimit の値を,総当り方式から得られた結果を元
にして適切に設定することによって,より高い割合で最適なリ
ンクディスジョイント経路の組を算出できることを示した.さ
らに,FLDPA が KDPPs と比較して計算クロック数を最大で
約 99.6%減少することを示した.
謝
辞
本研究はグローバル COE プログラム「アクセス空間支援基
盤技術の高度国際連携」(C12) と科研費の助成を受けたもので
ある。
文
献
[1] J.Surballe, “Disjoint paths in a network,” Networks, vol. 4,
pp. 125-145, 1974.
[2] R. Bhandari, Survivable Networks: Algorithms for Diverse
Routing. Kluwer Academic Publishers, 1999.
[3] S. Ramamurthy, L. Sahasrabuddhe, and B. Mukherjee,
“Survivable WDM mesh network,” Journal of Lightwave
Technology, vol. 21, no. 4, pp. 870-883, 2003.
[4] C. Mauz, “Unified ILP formulation of protection in mesh
networks,” in Proceedings of the 7th International Conference on Telecommunication COMTEL, vol. 2, pp. 737-741,
2003.
—6—
© Copyright 2026 Paperzz