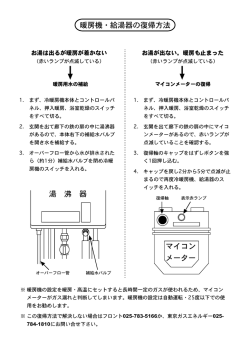
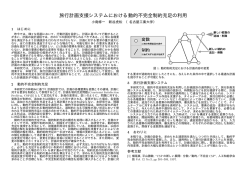
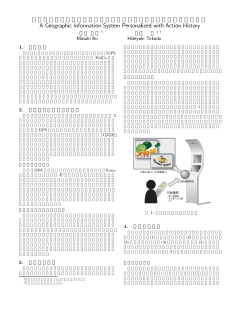
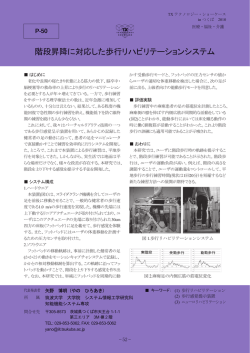
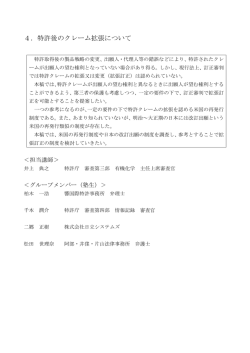
平成 21 年度 学生による研究発表会 磁気浮上システムを用いた非接触型搬送装置の開発 Jimmy Hadi Susanto(石川工業高等専門学校) ・河合康典(石川工業高等専門学校) 1 300mm はじめに 工場では物を運ぶとき,ローラやベルトなどを用いた接 触型の搬送装置が用いられている.しかし,接触型の搬送 装置では振動により騒音の問題と搬送品に傷がつきやすい 問題がある.また,搬送品が大きくなるとローラやベルト の高さの調整や保守管理なども問題となる.それに対して, 非接触型の搬送装置は上記の問題を避けることができると 考えられる. 本研究では,マイクロコンピュータを使って磁気浮上シ ステムを用いた非接触型の搬送装置を製作することを目的 とする.本稿では,磁気浮上システムの説明と製作した非 接触型の搬送装置の概要について述べる. 2 ᳗ਭ⏛⍹ 238mm ࠕࡦࡊ 22mm 45.5mm 30mm 67mm ムで実現するため,リアルタイムオペレーティング システム(RTOS)の 1 つである µITRON の規格で 作られた HOS(Hyper Operating System)を使う. 2 つの電磁石を 1 つのマイコンで制御するため,2 つ のマイコンを用いた.変位センサーから得られた距 離を AD ポートから得て,PID 制御則により制御入 力を DA ポートから出力する. 磁気浮上システムは,コイルに電流を流して電磁石にし て,その引力で鉄球などの対象物を浮かすシステムである [1].しかし本研究では,図 1 に示すように,鉄球は対象物 ではなく,電磁石自身を浮上させる. 磁気浮上の動作原理は,コンピュータから制御入力とし ての電圧信号はアンプに送られてアンプでその信号が増 幅され,電流に変換される.電流に変換された信号がコイ ルに流れることによってコイルは電磁石となり,鉄板との 間に引力が発生する.電磁石と鉄板とのギャップ距離をセ ンサーを使って測定し,その距離の情報をコンピュータに フィードバックする.コンピュータはそのフィードバック に基づいて,またアンプに制御入力を出す.これを繰り返 すことによって電磁石が安定に浮上することができる. 2. アンプ 軽量化を目指し,LM675(National Semiconductor 製) を用いたアナログの電圧-電流変換回路を製作した. マイクロコンピュータの DA ポートから得られた制 御入力に相当する電圧を電流に変換する. 3. 磁石 電磁石と永久磁石から構成される.永久磁石は,電 磁石自身の重さを保証するために用いる.また,電 磁石は平衡状態の安定化を実現するための調整と搬 送物の重さの変化を保証する. ㋕᧼ ࠦࡦࡇࡘ࠲ ࡦࠨ ࠕࡦࡊ 㔚⏛⍹ 㔚ᵹ 図 1: 磁気浮上システム 3 4. センサー 製作した非接触型の搬送装置のサイズ,コストなど を考えて磁気センサー (センサテック製 MDA-C5) を 用いた.検出距離は,1∼6mm だか,搬送装置の平 衡状態は電磁石と鉄板の距離が 2mm であるため十 分である. ᒁജ ᓮജ 非接触型の搬送装置の概要 本研究で製作した非接触型の搬送装置を図 2 に示す.非 接触型の搬送装置は,2 節で説明した磁気浮上システムが 4 つ独立に制御されるようになっている.マイクロコンピュー タ (マイコン),アンプ,磁石と変位センサーから構成され ており,各部分の説明は以下のとおりである. 1. マイクロコンピュータ (マイコン) H8/3052 マイコンを用いる.PID 制御をリアルタイ ᄌࡦࠨ 㔚⏛⍹ 図 2: 非接触型の搬送装置 磁気浮上システム 〒㔌ߩᖱႎ AD H8/3052 DA 4 おわりに 本研究では,マイクロコンピュータを使って磁気浮上シ ステムを用いた非接触型の搬送装置を製作することを目的 として,永久磁石と電磁石を組み合わせた非接触型の搬送 装置を開発した.本稿では,磁気浮上システムの説明と製 作した非接触型の搬送装置の概要について述べた. 参考文献 [1] 細江,荒木ら,制御系設計-H∞ 制御とその応用-,朝 倉書店,1994.
© Copyright 2026 Paperzz