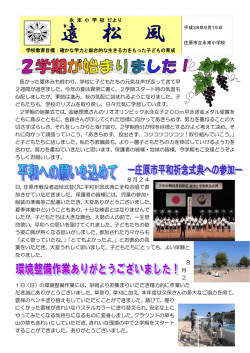
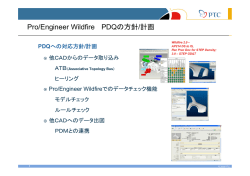
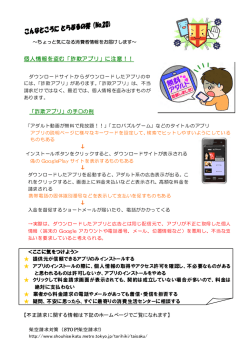
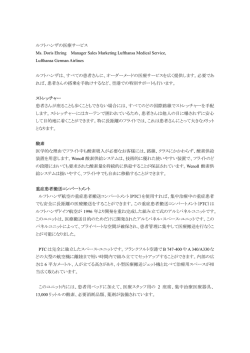
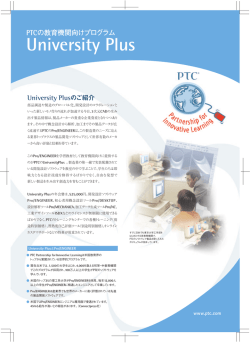
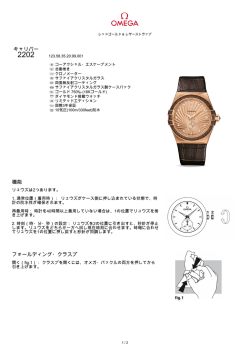
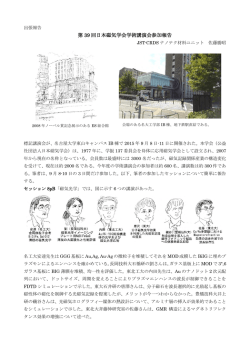
IIC-07-37 表面形状学習型 PTC に基づく原子間力顕微鏡のナノスケールサーボの提案 大島隆史∗ ,藤本博志(横浜国立大学) Proposal of Nanoscale Servo System of Atomic Force Microscope Based on Surface Topography Learning with PTC Takashi Oshima∗ , Hiroshi Fujimoto (Yokohama National University) Abstract Atomic force microscope (AFM) is the device that can measure the surface of samples on a nano-scale. It is common that controller of AFM is designed by classic control theory. However, authors have already proposed a surface estimate method based on disturbance observer theory. In this paper, perfect tracking control (PTC) is proposed for AFM with surface topography learning, which can guarantee that the error between sample and cantilever becomes perfectly zero at sampling point when the plant has no modeling error. Although both STO and PTC enable high-speed measurement, the robustness of proposed PTC is much higher than STO. The advantage is confirmed by simulations and experiments. キーワード:原子間力顕微鏡,完全追従制御,表面形状オブザーバ,学習制御,モデル化 (Atomic Force Microscope, Perfect Tracking Control, Surface Topography Observer, learning control, modeling ) 1. はじめに 原子間力顕微鏡 (Atomic Force Microscope;AFM) は,試料 の表面をナノスケールで測定する装置である。図 1 に示すよ うに,探針を試料表面に沿って走査することで,表面凹凸によ るカンチレバーの変位を測定し,これを表面の像として形成 することができる。一般に近接する二つの物体 (この場合,探 針先端と試料のこと) には必ず力が作用するため,表面凹凸に よる力の変化をカンチレバーの変位として測定する AFM は 試料に対する制約が原理的には存在しない。このため STM(走 査型トンネル顕微鏡) では観察できない絶縁体表面の構造も観 察することができる。 AFM の動作方式としては,コンタクトモード,ノンコンタ クトモード,タッピングモードの3つの方式がある。コンタク トモードは,探針を試料表面に接触させて走査を行う接触方 式,ノンコンタクトモードは探針を試料表面に接触させず,カ ンチレバーの振動周波数の変化から表面形状を測定する非接 触方式,タッピングモードは探針を試料表面に周期的に接触 させ,カンチレバーの振動振幅の変化から表面形状を測定す る周期的接触方式である (2) (3) 。本稿で扱うコンタクトモード による表面形状の解析方法は,カンチレバーの変位を一定に 保つようピエゾの Z 軸を制御し,その操作量 u(t) を表面形状 として記録する方法が一般的であるが,機構の共振周波数に よりその帯域が制限されてしまう欠点があった。 そこで著者らの研究グループでは文献 (1) で外乱オブザーバ による試料の表面推定方法 (STO) を提案した。この制御法は プラントのモデル化により,物体の表面形状は外乱オブザー バと同様の推定機構により推定できることを明らかにしてい る。このことから閉ループの帯域制限により u(t) が実際に表 面形状に追従しなくても従来法に対する優位性を示すことが できる。しかしながら STO はプラントのモデル化誤差が大き い時,正確な測定を不可能にする欠点がある。それゆえ,これ まで STO は追従誤差を必ずしも零にしなくても良いという立 場をとっていたが,追従誤差をできるだけ零にするという方針 をとり高速走査による画像の劣化を抑えることを目指す。具体 的にはマルチレート制御系による完全追従制御 (PTC) (5) を応 用した繰り返し PTC(RPTC) (6) の考え方を用いることで,追 従誤差を零にする表面形状学習型 PTC を提案する。なお,文 献 (10) ではハードにより高速化を行っているが,本稿は制御 により高速化を行う。 2. AFM の光検出方式 表面凹凸による“カンチレバーの変位”を測定するには,レー ザ光の干渉を測定する方法 (光干渉方式) と,カンチレバーの 変位によるレーザ光の反射角の変化を測定する光てこ方式があ る。本稿では,より一般的とされている光てこ方式を用いた。 光てこ方式は,図 1 に示すように,1∼4 までの各ダイオー ドに入射する光強度の相対変化を測定するもので,てこ先端 (カンチレバー先端) の Y 方向のたわみとてこ先端の X 方向 へのねじれを見る。前者には光強度の (1+2)-(3+4) の相対変 化を,後者には (1+4)-(2+3) の相対変化を検出する。後者は 特に,摩擦力の測定となり,AFM と区別して FFM(Friction Force Microscope) と呼ばれる。本稿では,たわみのみを測定 するので検出方法としては前者の AFM となる。 RJQVQFKQFG NCUGT ; y(t) : EQPVTQNNCT ECPVKNGXGT FGHNGEVKQP u(t) RNQDG 4 RKG\Q UCORNG VQRQITCRJ[ VQRQITCRJKEFCVC Fig. 1. 図 1 光てこ方式 Optical lever method. 1/6 L10 k1 b m L20 k2 } L1 cantilever y L2 m F(t) d u 0 図2 コンタクトモードにおけるモデル化 Fig. 2. Contact mode model. 4. システム同定 (8) (9) 〈4・1〉 実験装置の内部構成 今回使用した AFM は,日 本電子製の JSPM-5200 の特別仕様である (図 3)。通常,市販の AFM はコントローラがブラックボックス化されており,ユー ザがアルゴリズムを変更することはできない。本実験装置で は,必要な入力信号のインターフェースを用意し,Dspace1104 により制御系を構成する改造を行った。 JSPM-5200 の内部構成について簡単に説明するため,図 1 における信号の流れをブロック図で示した (図 4)。図 4 にお いて,試料を走査するとカンチレバーの変位が PD(フォトダ イオード) によって出力され,この信号が AD 変換され DSP 内で y[i] として入力される。また,DSP 内で DA 変換された 操作量 u[i] は,アンプにより増幅し駆動電圧として PZT(ピエ ゾ) に印加される。このアンプによるゲインは Kg = 20,PZT の駆動電圧は KP ZT = 15.59[nm/V] である。また,DSP 内で の AD/DA のゲインは 1 になるよう調整している。 PD の出力 x[V] はカンチレバーの変位がフォースカーブ にしたがって電圧として出力される。したがって,カンチレ 図 3 JSPM-5200 Fig. 3. JSPM-5200. Ԙ u[i]=8? KP&52 u[V] &# #OR -I -2<6 - 2& %CPVKNGXGT FKUVWTDCPEG UWTHCEGVQRQITCRJ[ y=PO?Z=8? %CPVKNGXGT y[i]=8? KP&52 ԙ #& 図 4 JSPM-5200 の信号ブロック図 Fig. 4. Signal block dialog of JSPM-5200. 〈4・2〉 同定実験 システム同定実験では,実験により得 られた入出力データを元に最小 2 乗法を用いてモデルの推定行 う。同定条件としては同定入力 (擬似外乱) に M 系列信号を, モデルの推定には ARX モデルを用いた (文献 (8) 参照)。最小 2 乗法を用いることにより,離散時間における伝達関数は分母 2 次,分子 1 次で表され,これを零次ホールドで連続時間に変 換する。同定された伝達関数の遅い零点は無視できないため, (1) 式からの伝達関数は (2) 式で表すことができる。ここで注 意されたいのは,M 系列信号はカンチレバーに直接与えるこ とはできないので,図 4 における➀から M 系列信号を PZT に入力し,➁における出力から同定を行うようにした。 10.034 × 109 P (s) = 2 · · · · · · · · · · · · · · · · · · (2) s + 8219s + 1.274 × 109 図 5(a) には式 (2) によるプラントの周波数特性とサーボアナ ライザ (小野測器製) により同定した周波数特性の比較を行っ た。同定したプラントは 5610[Hz] に大きな共振を持ち,低域 においてもゲインが高いことがわかる。また,ステップ応答に よる時間領域の検証から,モデル出力が測定出力 (実際の出力) に対してある程度再現できていることも確認できるであろう。 40 sabo analizer system identification /GCUWTGF1WVRWV OQFGNQWVRWV 35 30 25 XQNVCIG=8? とできる。このモデルから試料の凹凸が入力外乱とモデル化 できることを文献 (1) では示している。実際の実験では,カン チレバーの変位 y をフォトダイオードとレーザ光を用いて測 定しているため,プラントの伝達関数にはある一定のゲイン g を掛けた値となる。ゲイン g と出力の関係については次章で 説明する。なお,式 (1) の詳細な導出方法としては文献 (1) を 参考にされたい。 バーの変位 x[V] を y[nm] として換算するためには,PZT の駆 動電圧と PD からの出力の関係式をフォースカーブから求め KP D = 3.61 × 10−2 [V/nm] を得た。 なお,この KP D は JSPM-5200 によるフォースカーブの測 定データを 1 次近似したものから求めた結果である。フォー スカーブについては文献 (1) を参考にされたい。 Amplitude [dB] 3. コンタクトモードによるモデル化 (1) (7) AFM に外乱オブザーバを用いる場合や第 5 章で提案する制 御法には,制御対象のモデル化が必要となる。そこで AFM の モデルはカンチレバーと探針・試料間の相互作用から考え,図 2 のようなモデルを採用する (7) 。測定モードとしては,今回は モデル化を簡単にするためコンタクトモードで測定を行った。 試料にコンタクトした瞬間のバネの長さは自然長であるた め,バネ k1 の自然長を L10 ,k2 の自然長を L20 とする。また, b はダンパ係数,現在の長さをそれぞれ L1 ,L2 とおき,u を ピエゾに対する操作量,d を試料の凹凸とすると,試料とカン チレバーの相互作用は,図 2 のように表すことができる。た だし, ,F (t) は,カンチレバーがバネ k2 から受ける力,すな わち試料からの原子間力を示している。 図 2 のモデルから質量 m をもつカンチレバーの運動方程式 をたてれば, k2 × g(u + d) y= · · · · · · · · · · · · · · · · · · · · · · · · · (1) ms2 + bs + (k1 + k2 ) 20 15 10 5 0 2 10 3 10 Frequency [Hz] (a) プラントのボーデ線図 図5 4 10 VKOG=OU? (b) ステップ応答 2 次モデルのステップ応答とプラントのボーデ線図 Fig. 5. Characteristic of plant. 2/6 5. コントローラの設計 〈5・1〉 従来法によるコントローラの設計 今回提案法と の比較に用いるコントローラは製品で使われているコントロー ラを使用し,これを従来法とした。コントローラの式は以下 に示される。 ωc C(s) = kp · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · (3) s + ωc ただし,実験装置がマニュアル通り発振する直前までチューニン グしたところ,比例ゲイン kp = 64,ωc = 2πfc (fc = 0.5[Hz]) として設計を行った。図 6 にプラントとコントローラに対す る一巡伝達関数を示した。図 6 から従来法は,カットオフ周 波数が 252[Hz] であり,これは比例制御とローパスフィルタが この帯域までは追従できることを示している。またゲイン余 裕 14.3[dB],位相余裕 89.5[deg] という結果が得られた。 Gm = 14.3 dB (at 5.68e+003 Hz) , Pm = 89.5 deg (at 252 Hz) 100 Magnitude (dB) 50 0 -50 -100 -1500 Phase (deg) -45 -90 -135 -180 -225 -270 -2 10 Fig. 6. 10 0 2 10 Frequency (Hz) 10 4 図 6 一巡伝達特性 Characteristic of open-loop transfer function. 〈5・2〉 表面形状オブザーバ (STO) (1) 操作量 u と測定 出力 y から,外乱なる試料表面の凹凸 d をオブザーバを用いて 推定する。その推定値 dˆはノミナルプラントの逆モデル Pn−1 (s) を通した信号から操作量 u(t) を差し引いたものを,カットオ フ周波数 ωc のローパスフィルタ Q(s) を通して得ることがで きる。この構成を図 7 に示す。文献 (1) ではこの特別な外乱オ ブザーバを表面形状オブザーバ (STO) と呼んでいる。STO は オープンループで構成されているため,閉ループの帯域に制 限されず,ナイキスト周波数までは Q(s) の帯域を上げること ができる。したがって,実際に u(t) が凹凸に追従しなくても, すなわち追従誤差 e が零でなくてもノミナルプラントがモデ ル化誤差を持たなければ ωc 以下の周波数で正確に試料の凹凸 d を推定することができる。またオブザーバの周波数応答は ˆ = P (s) × Pn−1 (s) × Q(s) ≈ Q(s)· · · · · · · · · · · · · · (4) d/d であり,Q(s) は 2 次系のローパスフィルタから次式で表すこ とができる。 2 ωc · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · (5) Q(s) = s + ωc 〈5・3〉 提案法によるコントローラの設計 前節で示した STO はオープンループで構成されているため,閉ループの帯 域よりも Q(s) の帯域を上げられるのが良いとされてきた。し かしながらオブザーバはオープンループであるがゆえに,u(t) の追従性が大きく失われると,Lennard-Jones ポテンシャル (1) によってプラントのモデル化誤差が大きくなり,ロバスト安定 性を大きく失ってしまうことになる。したがって,モデル化誤 差の原因となる追従誤差 e を零にすることで STO によるデメ リットを克服することを考える。そこで本稿では PTC 法を適 用することにより,学習した追従誤差 e から生成した目標軌 道 (後述) 対して完全追従し,フィードフォワード的に追従誤 差 e を抑圧することで制御性能の向上を達成する。 PTC 法は図 8 に示すように,目標軌道のサンプリング周期 Tr と制御周期 Tu が異なる 2 自由度制御系である。指令値の 1 サンプル周期 Tr の間に制御入力を Tu ごとに n 回切り替える 制御法である。ただし n はプラントの次数である。通常,シ ングルレートでプラントの逆システムを構成しようとすると, 線形連続時間系のプラントを短いサンプリング周期で離散化を したときに生じる不安定零点の影響により,フィードフォワー ド制御器が不安定となる。したがって,マルチレート制御にす ることによりフィードフォワード制御器はプラントの安定な 逆システムを作ることができる (5) 。 y[k+2] r[i+1] y[k+1] y[k] r[i] u2[i] u1[i] kTu (k+1)Tu (k+2)Tu Tu Tu iTr (i+1)Tr Tr 図 8 マルチレート制御 Fig. 8. Multirate control. 〈5・3・1〉 制御対象の離散化 図 2 でモデル化した 2 次の 制御対象を離散化することを考える。状態変数を x とすると 連続時間系の状態方程式は次式となる。 ẋ = Ac x(t) + bc u(t) · · · · · · · · · · · · · · · · · · · · · · · · · · · (6) y(t) = cc x(t) · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · (7) 短い方のサンプリング周期 Tu で離散化した状態方程式は x[k + 1] = As x[k] + bs u[k] · · · · · · · · · · · · · · · · · · · · · · · (8) y[k] = cs x[k] · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · (9) d(t) r(t) - setpoint + C(s) surface topography + u(t) + - + と表せる。ただし,x[k] = x(kTu ) であり y(t)=e(t) P(s) As = eAc Tu , bs = Tu eAc τ bc dτ · · · · · · · · · · · · · · · · (10) 0 -1 Pn (s) Q(s) 㨊 d(t):proposed 図 7 STO のブロック図 Fig. 7. Block diagram of STO. である。 〈5・3・2〉 表面形状学習型 PTC AFM の制御に PTC 法 を用いる場合,目標値はカンチレバーの平衡位置であるため 零となる。したがって,このまま走査を行えばフィードバック 制御のみとなり,従来の制御法にしかならない。文献 (6) によ 3/6 ると周期的な外乱をサンプル点ごとに抑圧する繰り返し PTC 法を適用することができるが,AFM の測定に関しては試料の 表面形状が周期的なもののみを選ぶことはできない。そこで AFM のスキャン方法に注目し,行きと帰りの走査において試 料の表面形状を学習・制御する表面形状学習型 PTC(Surface Topography Learning with PTC:STL-PTC) を提案する。な お,今回は試料の観察にグレーティング素子を用いたが,制御 は特にグレーティングでなくても適用可であることに注意さ れたい。 図 9 は STL-PTC のブロック図である。操作量 u は表面形 状データを表し,目標値を零とするので出力 y はエラー信号 e となる。エラー信号がより小さくなれば,その時の u を画像 化したときに,より正確な画像がとれることを意味する。 制御方法について説明する。まずスキャン方法であるが,SPM における画像測定では,X 方向走査において開始位置から走 査幅だけ右方向へスキャンを行い,同じ経路を左方向へスキャ ンすることで走査開始位置へプローブを戻す。これを Y 方向 に繰り返し走査することで,面走査を行う (図 11)。 この X 方向における右方向への走査をフォワードスキャン (FWS),左方向への走査をバックワードスキャン (BWS) と呼 び,双方のスキャンで画像を測定することができる。探針が FWS と BWS で全く同じ経路を走査しているとするならば, スキャン時に現れるエラー信号も理想的には全く同じになる はずである。したがって,FWS 時に学習したエラー信号から, BWS 時に現れるエラー信号を打ち消すように制御した学習制 御を行えば,フィードバック制御の追従誤差 e を減少させる 事ができる。 図 12 に示すように,X のスキャン波形は三角波形をしてお り,FWS と BWS で画像の測定を行っている。この FWS 時 に図 9 のスイッチを T 秒間 (=メモリの段数 Nm × 出力信号 のサンプリング周期 T y) オンとし,メモリ列からなるシグナ ルジェネレータによりエラー信号を記憶する。BWS 時にはシ グナルジェネレータが誤差を零にするための目標軌道を生成 し,PTC により誤差を零にする。 したがって,Nm 段のメモ リ列はフィードフォワード補償器として働くことができ,エ ラー信号をサンプル点ごとに抑圧することが可能となる。 ここで,制御対象は 2 次であるので状態変数 x が x = [y, ẏ] のとき,エラー信号に対するシグナルジェネレータは図 10 の ように設計できる (6) 。ただし,r[i] と ṙ[i] は次式となる。 z r[i] = − N y[i] · · · · · · · · · · · · · · · · · · · · · · · · · · · · · (11) z m −1 r[i + 1] − r[i − 1] · · · · · · · · · · · · · · · · · · · · · · · · · (12) ṙ[i] = 2Ts また,STO はオープンループであるのでモデル化誤差により ロバスト性が失われるが,提案法はフィードバック制御で補償 される。 PTC 法はフィー 〈5・3・3〉 PTC(完全追従制御) 法 (5) ドフォワード制御器とフィードバック制御器からなるマルチ レート制御にすることにより,シングルレートでは達成できな い完全追従を達成する。 ここでフィードフォワード制御器の設計について述べる。プ ラントの次数 n = 2 であることから 2 サンプル目について式 (8),(9) を考え,時刻 t = iTr = kTu とすると次式が得られる。 x[i + 1] = Ax[i] + Bu[i]· · · · · · · · · · · · · · · · · · · · · · · · · (13) A = A2s , B = [As bs , bs ] 式 (13) で表される制御対象の離散時間状態方程式から次式の 安定な逆システムが得られる。 u[i] = B −1 (I − z −1 A)x[i + 1]· · · · · · · · · · · · · · · · · · · (14) (8) 式の制御対象が可制御であれば,行列 B の正則性は保証さ れ,(14) 式は極が z 平面の原点にあることから,安定な逆形 であることがわかる。したがって参照値 r[i] として制御対象に 対する目標軌道の予見値 r[i] = xd [i + 1] を与えれば,フィー ドフォワード制御出力が (15) 式が与えられ,ノミナルプラン トに対してサンプル点上での完全追従が達成される。外乱や プラントに変動があるときはフィードバック制御器 C[z] によ り補償される。また,PTC が成立するときのノミナル出力は 式 (16) で表される。 u0 [i] = B −1 (I − z −1 A)xd [i + 1] · · · · · · · · · · · · · · · · (15) y0 [i] = z −1 Cxd [i + 1] + Du0 [i] · · · · · · · · · · · · · · · · · (16) topographic data T=K? $ +\# GSWKNKDTKWO RQUKVKQP surface topography W W=K? * 6W + & %=\? 5 [=K?G=K? 6[ 2 U + + * 6[ \% + Signal Generator UYKVEJ 図 9 表面形状学習型 PTC Surface Topography Learning with PTC. Fig. 9. -r -r[i] -r 2Ty + Z - -1 Z -1 Z + y[i] -(Nm-2) + 図 10 シグナルジェネレータ Fig. 10. Signal generator. : ; 図 11 プローブの面走査経路 Fig. 11. Surface scan route of probe. $95 (95 :UECP T UYKVEJ 10 NGCTP 1(( 10 1(( 10 1(( EQPVTQN NGCTP EQPVTQN NGCTP EQPVTQN 図 12 制御方法 Fig. 12. Control approach. 4/6 6. シミュレーションおよび実験 〈6・1〉 STO のシミュレーション 矩形波状のサンプル に対するシミュレーションとして,従来法とオブザーバによ る推定外乱を図 13,図 14 に示した。図 13(a) から閉ループの 極はプラントの共振周波数に制限されてしまうが,図 14(a) か らオブザーバはプラントの共振周波数に依存せず,ナイキス ト周波数に制限されなければローパスフィルタの極に依存し ていることが確認できる。したがって,図 13(b) と比較して図 14(b) の場合は,矩形波状のサンプルに対してより正確描けて いることがわかる。 以上より,実際に実験による検証を行い,その挙動を確認 する。 Bode Diagram 20 d:input u:conventional 0.1 0.08 -60 -80 0.06 5.6 5.6 0.04 4.2 4.2 0.02 2.8 2.8 0 1.4 1.4 -90 -180 -270 10 0 10 1 10 2 Frequency 10 3 (Hz) 10 4 10 5 −0.02 0 5 10 15 time [msec] 20 25 error [nm] Phase (deg) -1000 error [nm] -40 voltage[V] Magnitude (dB) 0 -20 大きく劣化するが,STO は画像の劣化が減少していることが 分かる。ヒストグラムで考察すると,従来法では凹領域の頻度 が増加していることから,凹凸の急激な変化に対して追従で きないことを意味する。しかしながら,従来法による u(t) が 追従性を大きく失うということは,STO によるモデル化誤差 が大きくなり画像が劣化しやすいとも言える。これは図 21 の STO と提案法における画像の劣化具合からその違いがわかる であろう。なお,図 19 で凸領域での頻度が増加しているのは, 凸部分が丸くなっており、この領域が増加していること意味す る。また従来法と提案法の比較として,エラー信号を ±3σ で 評価したもの表 1,2 に示した。走査スピード 385ms の時は凹 凸の高さに対して 4.53%改善しており,走査スピード 77ms の 時は 52.5%改善されていることがわかる。また,図 16,17 は 1 画像中のエラー信号を重ね合わせたものである。 0 -1.4 -2.8 (a) 補感度関数 (b) 従来法 (操作量 u) 図 13 閉ループ特性 Fig. 13. Characteristic of closed loop. -2.8 -4.2 -5.6 -4.2 50 60 d:input dhat:surface 0.1 -20 -40 0.08 -60 voltage[V] -80 Phase (deg) -1000 -45 -5.6 100 50 60 70 80 Data number 90 100 表 1 標準偏差の総合評価 (走査スピード 385ms) Table 1. Total evaluation 0.06 0.04 0.02 -90 -135 -180 10 0 90 0 10 1 10 2 Frequency 10 3 (Hz) 10 4 10 5 −0.02 0 5 10 15 time [msec] 20 error [nm] ˆ (a) ローパスフィルタ (2 次) (b) STO(推定値 d) 図 14 外乱オブザーバ Fig. 14. Disturbance observer. 〈6・2〉 グレーティング素子の観察 試料観察に当たり, 本稿では島津製作所の平面ブレーズドホログラフィックグレー ティング標準品を使用した。このグレーティングの形状は鋸波 状溝になっているのが特徴で,ガラス基板上に樹脂にて回折 格子溝が形成され,この溝に Al 等の反射膜がコーティングさ れている。図 15 に形状寸法を示す。 〈6・3〉 実 験 今回実験に使用した DSP のサンプリ ング周波数は 10[kHz] とした。グレーティング素子の表面を 走査し,従来法と STO,STL-PTC の比較を図 18,20 に示し た。また,図 19,21 は図 18,20 のそれぞれ対して計測された 表面凹凸の高さの頻度を表したヒストグラムである。従来法, STL-PTC のヒストグラムは操作量 u(t) を表し,STO のヒス トグラムは推定値 dˆ を表す。走査スピードは 1 列スキャンする 時間 (往復時間) を表し,走査レンジは共に 1.6µm×1.6µm で, 一枚の画像を取るのにそれぞれ,約 3 分,約 40 秒とかかって いる。図 20 のように走査スピードを上げると従来法は画像が 5.55 2.83 48.8 36.6 36.6 24.4 24.4 12.2 12.2 0 0 −12.2 −12.2 −48.8 −24.4 −36.6 −48.8 0 −36.6 10 20 30 40 50 −48.8 0 Data number 10 20 30 40 50 Data number (a) 制御前 (b) 制御後 図 17 誤差信号 (走査スピード 77ms) Fig. 17. Error signal. 表 2 標準偏差の総合評価 (走査スピード 77ms) Table 2. Total evaluation PO 図 15 グレーティング素子の形状 Fig. 15. Topography of grating element. with learn control[nm] 48.8 UWTHCEGVQRQITCRJ[ PO without learn control[nm] ±3σ 25 error [nm] Magnitude (dB) 0 70 80 Data number (a) 制御前 (b) 制御後 図 16 誤差信号 (走査スピード 385ms) Fig. 16. Error signal. Bode Diagram 20 0 -1.4 ±3σ without learn control[nm] with learn control[nm] 45.4 13.9 7. おわりに 従来法と STO の違いを示し,従来法に対する STO の優位 性を確認することができた。しかしながら STO はプラントの モデル化誤差に対してロバストでない問題があったため,凹 凸の急激な変化のある場所ではモデル化誤差が大きくなり,走 査スピードを上げるに従いその優位性は失われる可能性を示 した。これに対して提案法は追従誤差を PTC により抑圧で き,モデル化誤差に対してはフィードバックで補償されるた め,急激な凹凸の変化に対する STO の欠点を克服することが できた。しかしながら,行きと帰りの走査経路は厳密には誤 差があるため,凹凸の急激な変化に対してはその効果を発揮 するが,それ以外の場所で改悪してしまう可能性があるのは, 提案法の欠点でもある。 5/6 ˆ (b) STO(d) (c) STL-PTC(u(t)) 図 18 走査スピード 385ms(クロック周期 166µs) Fig. 18. Scan speed 385ms(clock cycle 166µs). 1000 1000 900 900 900 800 800 800 700 700 700 600 600 500 400 500 400 300 300 20 40 60 80 100 120 0 0 140 500 400 200 100 100 600 300 200 200 0 0 frequency 1000 frequency frequency (a) 従来法 (u(t)) 100 20 40 60 80 100 120 0 0 140 height [nm] height [nm] 20 40 60 80 100 120 140 height [nm] ˆ (a) 従来法 (u(t)) (b) STO(d) (c) STL-PTC(u(t)) 図 19 操作量 u(t) および推定値 dˆ における高さのヒストグラム (走査スピード 385ms) Fig. 19. Histogram of height by u(t) and dˆ (Scan speed 385ms). ˆ (b) STO(d) (c) STL-PTC(u(t)) 図 20 走査スピード 77ms(クロック周期 33µs) Fig. 20. Scan speed 77ms(clock cycle 33µs). 1000 1000 900 900 900 800 800 800 700 700 700 600 600 500 400 500 400 300 300 20 40 60 80 100 120 140 0 0 500 400 200 100 100 600 300 200 200 0 0 frequency 1000 frequency frequency (a) 従来法 (u(t)) 100 20 40 height [nm] 60 height [nm] 80 100 120 140 0 0 20 40 60 80 100 120 140 height [nm] ˆ (a) 従来法 (u(t)) (b) STO(d) (c) STL-PTC(u(t)) ˆ 図 21 操作量 u(t) および推定値 d における高さのヒストグラム (走査スピード 77ms) Fig. 21. Histogram of height by u(t) and dˆ (Scan speed 77ms). 8. 謝 辞 最後に本稿の一部は文部科学省科学研究費補助金 (課題番 号:18686036) によって行われたことを付記する。 参考文献 (1) K.Aoki, H.Fujimoto,:“ Nano Scale Servo Control of Atomic Force Microscope Based on Surface Topography Observer ”, IIC-06-132, pp1-6 (2006) 青木健吾,藤本博志: “ 原子間力顕微鏡のナノスケー ルサーボ装置の製作と制御に関する研究 ”, 電気学会 産業計測制御研究会, IIC-06-132, pp1-6 (2006) (2) 森田清三:“ はじめてのナノプローブ技術 ”,工業調査 会 (2001) (3) 森田清三:“ 走査型プローブ顕微鏡 ”,丸善 (2005) (4) 小郷寛,美多勉:“ システム制御理論入門“,実教出版 (2000) (5) H.Fujimoto, Y.Hori, A.Kawamura:“ Perfect TrackingControl Method Based on Multirate Feedforward Control ”, Trans.SICE, Vol.36, No.9, pp.766-772 (2000) (in Japanese) 藤本博志,堀洋一,河村篤男: “ マルチレートフィード フォワード制御を用いた完全追従制御法 ”,計測自動 制御学会論文集,36,9,pp766-772 (2000) (6) H.Fujimoto, F.Kawakami, S.Kondo:“ RRO Compensation of Hard Disk Drive Based on Switching Control and PTC ”, IIC-04-69,pp.13-18 (2004) (in Japanese) 藤本博志,川上文宏,近藤正示:“ スイッチング制御と PTC に基づく磁気ディスク装置の RRO 補償 ”,電気 学会産業計測研究会,IIC-04-69,pp13-18 (2004) (7) A.Sebastian, M.V.Salapaka, D.J.Chen and J.P.Cleveland: “ Harmonic analysis based modeling of tapping mode AFM ”, Proceedings of the American Control Conference, San Diego, pp232-236, California(1999) (8) 足立修一: “ MATLAB による制御のためのシステム 同定 ”,東京電機大学出版局 (1996) (9) 足立修一: “ MATLAB による制御のための上級シス テム同定 ”,東京電機大学出版局 (2004) (10) 安藤敏夫,古寺哲幸: “ 高速ビデオレート AFM ”,計 測と制御,第 45 巻,第 2 号 p.99-104 (2006) 6/6
© Copyright 2026 Paperzz