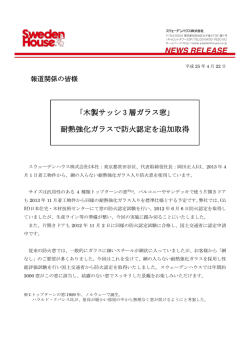
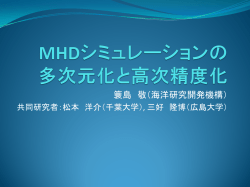
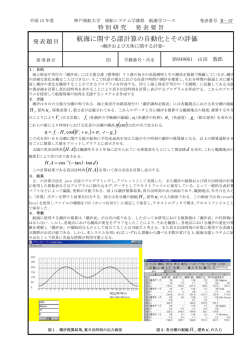
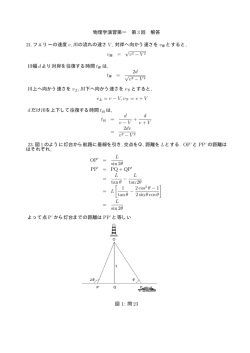
複数車線道路における白線の同時検出 ○長岡 孝太郎、胡 振程、王 臣豪(熊本大学) 1.はじめに 近年,実画像を用いた直接視覚ナビゲーション システム(VICNAS)の開発が盛んに行われてお り,正確な実画像上への仮想物体の投影(拡張現 実感技術の実現)が必要となっている .しかし,そ のためには自車両の正確な位置を把握する必要が あり,位置合わせ問題を解決しなければならない . 本研究は,拡張カルマンフィルタを用いて白線検 出することにより,道路中央と車両との距離,カ メラ姿勢データを取得し,マップマッチング処理 後の車両位置を特定する手法により作成したモデ ルを利用し隣接車線を推定し複数車線を持つ道路 にも対応させることを目的とする. 2.自車走行白線の推定 図 1 に従来の車線検知システムの全体の概要を 示す. 3.複数車線への対応 3.1 車線モデル モデルの構築部では,検出処理を行うために必 要とされる初期モデルの定義を行う.設定される モデルは,『初期の車線モデルを表す状態ベクト ル Xd』である.このモデルは,各カメラパラメー タ(L,X0, φ, α),および道路の一次,二次水平 曲率情報 C0,C1 から構成される. T uiL ,u iR = g L , X 0 , Φ ,α ,C 0 ,C 1 uiL = f x u iR= f x 2 2 vi − f y α X 0−L C0 f y h C 1 f yh −tanΦ f yh 2 vi − f y α 6 v i − f y α 2 2 2 v i− f y α X 0 C 0 f yh C1 f y h −tan Φ f yh 2 v i − f y α 6 v i − f y α 2 (1) ただし i=1‥‥n とする 左右隣接車線の白線データの初期値は両側とも に検出できた場合の自車線の白線データ uiL,uiR を用いて以下の式により設定する. u iL '=u iL −width i uiR '=uiR widthi (2) ここで uiL',uiR' は,自車線検出後の白線データ であり, width i =uiR −u iL である.この値から左右 それぞれの隣接車線の位置を推定する. 3.2 特徴抽出処理 他車線は自車線よりも距離が遠く線が薄いため 図 2 のように中央点最候補画像では点があまり取 れず中央点候補画像ではノイズによる影響が大き いため右モーメント画像を特徴点として隣接車線 の検出を行う. 図 1 車線検知システムの概要 この車線検知アルゴリズムにより,白線の存在 する一般的な車道においては,分岐部や複数の白 線の存在時を除き,十分な検出精度が達成された. そのため,今後は,車線検知システムの技術応 用が重要な研究課題となると言える. 本稿では,複数車線での自車線以外の隣接した 車線の検出と信頼度推定を行う. 図 2 特徴点比較 3.3 信頼(安定)評価 自車線より推定された隣接する車線の推定モデ ル Xd(p) と右モーメント画像とのマッチングを以 下の式で計算する. N N P L= L , P R= R (3) ΔvL Δ vR ここで,PL, PR は左白線モデルおよび右白線モ デルの信頼性を評価するスコアであり,NL,NR は各モデルの左右 3 ピクセル内の探索で右モーメ ント画像での候補点が検出できたライン数, ΔvL,ΔvR は画像内に含まれる各モデルの高さ (=探索したライン数)を表す. 隣接車線では自車線に比べ候補点が少ないが右 モーメント画像では白線以外のノイズは抑えられ るためスコアが 10%以上になった際は白線として 信頼できるものとする. 4.実験結果 図 3 のような片側 2 車線の道路で実験を行った 結果を図 4 に示す. 図 3 実験画像 図 6 右モーメント画像 図4では自車線と推定されたモデルを黄色で隣 接している車線と推定された車線モデルをピンク で表示している.また左上のピンクの数字は信頼度 スコアを表したもでであり左側が右モーメントを 用いた場合で右側が中央点最候補を利用した場合 であり上が隣接する左車線,下が隣接する右車線 をそれぞれ表している. 5.考察 今回隣接している右車線は中央点最候補を利用 しての信頼度推定では検出できなかったが右モー メント画像を利用してのスコアが 10%を超えてい るため隣接車線として検出できた.自車線に比べ検 出できる長さが短く情報が少ないためノイズを削 除しより正確にした中央点最候補画像に比べ右モー メント画像を利用した場合のほうがスコアがよく なったと考えられる. 6.おわりに 本研究では現在走行している車線検知に加えて, 走行車線と左右に隣接する車線の検出を行った. これにより,走行車線の周辺環境が,道路領域で あるか,非道路領域であるかの識別が可能であり, 識別結果と地図情報などを用いての車線数情報な どから,走行車線番号の推定が可能である. 今後は車線の色や形状情報から車線変更である か車線逸脱かの判別などを行っていきたい. 参考文献 [1]Romuald Aufrere, Roland Chapuis, Frederic Chausse,“ A model-driven approach for real-time road recognition”, Machine Vision and Applications, 2001, pp. 95-107. 図 4 実験結果 [2]Y. Wang, D. Shen, and E. K. Teoh, “ Lane detection using spline model ”,Pattern Recognit. Lett., vol. 21, no. 8, pp. 677-689, Jul. 2000. [3] Dickmanns, E.D.; Mysliwetz, B.D.”Recursive 3-D road and relative ego-state recognition”Pattern Analysis and Machine Intelligence, IEEE Transactions on Volume 14, Issue 2, Feb 1992 Page(s):199 - 213 図 5 中央点最候補画像
© Copyright 2026 Paperzz