2013.3.4
チャレンジゼミナール成果報告会 No. P14
回転と摩擦と重力を利用した
玩具のしくみ
EE‐3
3
S‐3
S‐3
S3
S‐3
元番 教允
小林 大輝
水島 洋介
藤原 佑輔
(佐藤ゼミナ ル)
(佐藤ゼミナール)
競走馬のおもちゃ
E-3 元番 教允
同じ周期の場合、片方だけ揺らすと、下図のよ
うなイメージで、もう一方に揺れが伝わり、交互
に振動のエネルギーの交換を行う。
右
左
長さをかえて異なった周期にして、片方だけ揺ら
すと、下図のようなイメージで、周期的にもう一方
に小さな振動を起こすが大きく振れることがない。
振動のエネルギーの交換が行われない。
右
左
S-3 小林 大輝
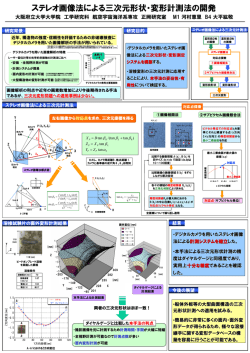
登り人形
左右の紐を交互に引っ張るとカメが
ウサギを引っ張りながら登る
動作説明
①:左右の張力は同じ(緩めた状態)
②:左の紐を強く引っ張ることで紐と
穴との摩擦抵抗が大きくなり、紐に
固定された状態で反時計回りに回転
する。それによって右側の穴は紐に
沿って上にスライドする。
③:続いて右の紐をピンと強く引っ張ると、
②と逆に、右の穴との摩擦抵抗が大きくなり、
紐に固定された状態で時計回りに回転する。
それによって左側の穴は紐に沿って上にス
ライドする。
後はこの繰り返しで登る。
結論:登り人形の基本形状は、左右の管がハの字形に配置されていること
である 紐との摩擦が紐の張力で変化することを巧みに利用して 登って
である。紐との摩擦が紐の張力で変化することを巧みに利用して、登って
いる。
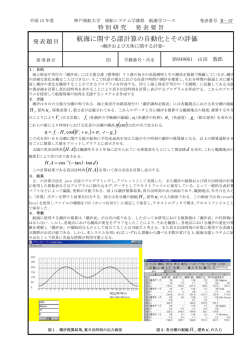
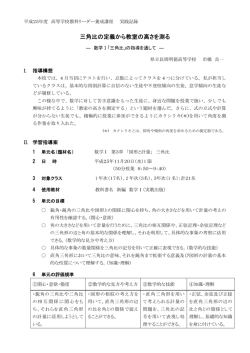
イルカのおもちゃの運動解析
イルカ
のおもちゃの運動解析
θ
モデル化
オリジナル
S-3 藤原 佑輔
実験ツール
y
x
重心周りの回転の運動方程式
重心の運動方程式
下のグラフは、回転角θ(青)と重心のx方向の速度 dx/dt (赤)
の計算結果である。重心が最下点にある状態で角速度
3.69rad/sを与えた。二回転した後にその場で振れ続けてい
る。この角速度が回転を続けるかその場で振動するかの境
角速度が 転を続
振 す
境
目の値である。
θ
dx/dt
計算条件
円盤直径:10cm
軸のシフト:5㎝
軸直径:5㎜
質量:200g
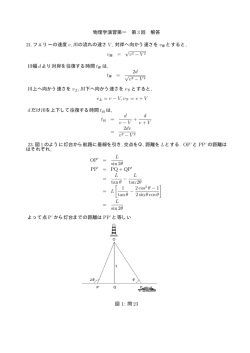
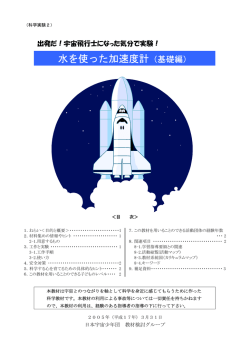
坂を登る仕組み
S-3 水島洋介
坂をのぼる玩具
x
開きの角度: β
上
↓面図
R
f
w
α
コ
↓マ
ϕ
重心の移動する線
側
↓面図
{}
θ
w
R
R
tan α =
L
w
tan β =
L
tan ϕ =
コマ自体は坂を上っているようにみえ
るが、実際にはコマの重心は下がってい
る。
水平な
水平なレールに対して、実質的な坂の
対
実質的な坂
角度αを求めた。このα以下の角度であ
れば坂を登ることができる。
コマの動作シュミレーション
0.8
d 2θ
I 2 = ( R − x tan α ) f
(回転の運動方程式)
dt
0.6
d 2x
m 2 = mg sin α − f cos α (x方向の運動方程式)
dt
0.4
2
2
dθ
dx dθ
d x
= ( R − x tan α ) 2 − tan α ⋅
2
dt
dt dt
dt
0.2
運動方程式を逐次数値計算した。右に回
運動方程式を逐次数値計算した
右に回
転角θ、位置x、速度vの時間変化を表す。
0
回転角 θ /20[rad]
距離 x[m]
速度 v ・20[m/s]
10
20
30
時間 t [s]
シュミレーション結果
40
50
© Copyright 2026 Paperzz