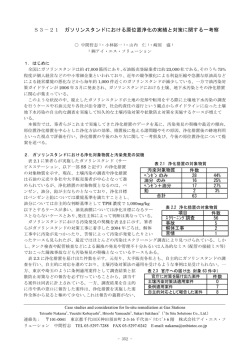
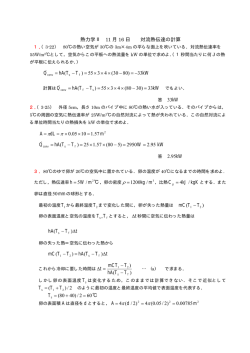
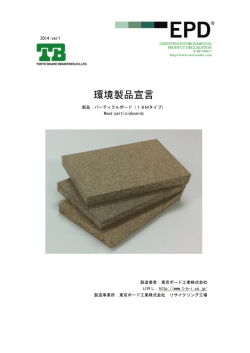
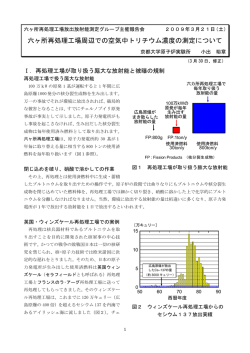
解析事例紹介2 静電駆動マイクロステップモータの 電界解析による駆動力の算出 東京大学 生産技術研究所 3部 藤田研究室 飯塚 哲彦 はじめに ステップモータを小型化、かつ静電駆動にして、デバイス を作製、駆動実験を行っている。 本発表では、駆動原理の概要を述べ、デバイスを単純化 したモデルを作成し、静電駆動力を求めるため、 MemsONEで電界解析を行った内容について報告する。 将来的な目的としては、得られた静電駆動力から、可動 部の過渡的振動などダイナミクスをシミュレートすること が挙げられる。 1 解析事例紹介2 3相静電駆動ステップモータ駆動原理 1 2 3 V 1 2 3 V 1 2 3 V 1がオン、すなわち定電圧が印加される。 内側の可動部の電極はGNDとなっており、 これと外周のステータ電極が空隙を介して、 コンデンサを形成し、静電引力が作用する。 2がオン、内側のばね構造で支持された可 動部が左へ移動する。図で上下同時に電 圧を印加しているため、上下方向の静電 引力が平衡しており、電極対が吸着しない ようにしている。またばね支持構造を工夫 することにより、横方向に動きやすく、上下 方向に動きにくくすることもできる。 3がオン、さらに左へ移動する。ばねの復 元力が静電駆動力より大きくなったときが 変位の限界となる。電圧印加の順番を逆 にすれば、右へ移動させることもできる。 静電吸引力が働く電極の動作 ムーバ 0V 電極重なり1um ギャップ2um ステータ 75V 5um 10um 隣の電極がアラインしているときは、図のように、ギャップ距離2umのところ が1um重なっている。ステータに電圧75V、ムーバに0Vが印加されると、静 電吸引力が働く。ムーバは、工夫により、下方向へ可動となっているので、 ステータとムーバの電極がアラインするまで、移動する。この際の、それぞ れの電極の重なり、1, 2, 3, 4, 5umの配置モデルをMemsONEで作成し、 電界解析を行って、静電駆動力を求めた。 2 解析事例紹介2 1電極対モデル 空気 ムーバ 0V 静電駆動力 ステータ 導体 75V ギャップ:2um 重なり:1um ムーバやステータの上辺、下辺それぞれのY方向成分の静電力を合計し、 下辺ー上辺など差をとって、静電駆動力を求めた。シェルメッシュ:0.4。 電極重なり1∼5umでムーバの位置を変えたモデルをそれぞれ作成した。 3電極対モデル 0V 0V B D-Eを静電駆動 力として計算 D 0V 75V E 0V A A-B-Cを静電駆 動力として計算 C 0V 寸法、メッシュサイズ、ギャップ、重なりは、1電極モデルと同じ。75V印加した ステータの右下に近隣のGNDとなっている導体の有無がモデルの相違してい る主な点である。 3 解析事例紹介2 静電ポテンシャル、ノルム @ 3電極対モデル 電界、ベクトル @ 3電極対モデル 4 解析事例紹介2 電界、ベクトル、拡大図 @ 3電極対モデル 電界、ノルム、拡大図 @ 3電極対モデル 右下の導体の影響が見られる。 5 解析事例紹介2 静電力、ノルム、拡大図 @ 3電極対モデル F=qEで計算され、導体表面のみ静電力が生じている。 静電力、ベクトル、拡大図 @ 3電極対モデル 右下の導体の影響が見られる。 6 解析事例紹介2 1 electrode pair, Electrical field, norm, Stator-Mover, gap 2um, overlap 1um 1電極対と3電極対モデルの比較 電界ノルム 3 electrode pair, Electrical field, norm, Stator-Mover 電極ギャップ付近では、両者の電界 の分布はほぼ同じである。 1 electrode pair, Electrical field, norm, Stator lower-right 1電極対と3電極対モデルの比較 電界ノルム 3 electrode pair, Electrical field, norm, Stator lower-right 右下の導体の有無により、図のよ うな電界分布の相違が見られる。 7 解析事例紹介2 1 electrode pair, Electrical field, vector, Stator-Mover 1電極対と3電極対モデルの比較 電界ベクトル 3 electrode pair, Electrical field, vector, Stator-Mover 1電極対と3電極対モデルで、電界 ベクトルの長さが違うが、値は同じ である。自動スケールの倍率が違う ためである。 1 electrode pair, Electrical field, vector, Stator lower-right 1電極対と3電極対モデルの比較 電界ベクトル 3 electrode pair, Electrical field, vector, Stator lower-right 電界ベクトルの長さは、両者異なっ た自動スケールの倍率なので、強 さは比較できない。3電極対モデル は右下導体の影響が見られる。 8 解析事例紹介2 ステータの対向電極の辺近傍の電界(リスト出力) 1電極対モデル 3電極対モデル 3 electrode pair, Electrical field, Stator 6.00E+13 5.00E+13 5.00E+13 Electrical field [uV/m] 6.00E+13 4.00E+13 3.00E+13 系列1 2.00E+13 1.00E+13 0.00E+00 4.00E+13 3.00E+13 系列1 2.00E+13 1.00E+13 0.00E+00 0 1 2 3 4 5 16 17 18 position Y [um] 19 20 21 Position Y [um] 右下に導体があるので、電 界が少し高くなっている。 右下に導体がない。 ステータとムーバが対向し、静電 ギャップを形成しているところ。 ステータの下辺の静電力(リスト出力) 1電極対モデル 3電極対モデル 3電極対 ステータ 重なり1um 静電力 ステータの下辺 合計7.19E-03[uN] 1電極対、静電力、重なり1um、ステータ下辺、合計 6.38E-04 [uN] 0.00E+00 -1.00E-04 0 0.00E+00 0 2 4 6 8 10 -5.00E-05 2 4 6 8 10 -2.00E-04 -1.00E-04 系列1 -1.50E-04 静電力 [uN] 静電力 [uN] Electrical field [uV/m] 1 electrode pair, Electrical field, Stator surface -3.00E-04 -4.00E-04 系列1 -5.00E-04 -6.00E-04 -7.00E-04 -2.00E-04 -8.00E-04 -9.00E-04 -2.50E-04 位置 X座標 [um] 位置 X座標 [um] 右下にGND導体がある3電極対モデルの方が、静電力の合計が 7.19E-03 [uN] @ 3電極対モデル、下向き 6.38E-04 [uN] @ 1電極対モデル、下向き と大きくなっている。 9 解析事例紹介2 ムーバの下辺の電界 1電極対モデルの電界 > 3電極対モデルの電界 電界 [uV/m] カラム訂正版、電界比較、ムーバー下辺 4.50E+13 4.00E+13 3.50E+13 3.00E+13 2.50E+13 2.00E+13 1.50E+13 1.00E+13 5.00E+12 0.00E+00 3電極対ムーバー下辺 1電極対ムーバー下辺 12 13 14 15 16 位置 X座標 [um] 3電極対モデルは、右下にGND導体があるので、ステータからの電束 が右下へ流入している分、1電極モデルより、小さいと考えられる。 ムーバ下辺の静電力 1電極対モデル 3電極対モデル 1電極対 辺の長さ10um mesh0.2 重なり1um 下辺 合計6.26E-03[uN] 3電極対 重なり1um 合計4.11E-03uN 2.00E-04 0.00E+00 -2.00E-04 12 14 16 18 20 22 -4.00E-04 -6.00E-04 系列1 -8.00E-04 -1.00E-03 -1.20E-03 静電駆動力 [uN] 静電駆動力 [uN] 2.00E-04 0.00E+00 -2.00E-04 12 14 16 18 20 22 -4.00E-04 -6.00E-04 系列1 -8.00E-04 -1.00E-03 -1.20E-03 -1.40E-03 -1.60E-03 -1.40E-03 位置 X座標 [um] 位置 X座標 [um] 静電力の辺にそった合計の値 6.26E-03 [uN] @ 1電極対モデル 4.11E-03 [uN] @ 3電極対モデル F=q E より、静電力を求めており、前のスライドの電界の大小関係と 適合する結果となった。 10 解析事例紹介2 静電駆動力の計算について FB 辺B FA 辺A Fc 辺C 重なり 1umの場合 3電極対モデル FA – FB – FC = 2.76 E -03 [uN] (FA: 4.11E-03, FB: 0.22E-03, FC: 1.13E-03) 1電極対モデル ムーバの2電極 FA – FB = 5.52 E -03 [uN] (FA: 6.26E-03, FB: 0.74E-03) 3電極対モデルで、FCの値がそれほど小さくないので、その分、合計値が 小さくなっている。 重なりー静電駆動力、1電極対モデル、ムーバ側 1電極対、重なりー静電駆動力、ムーバ 0.006 静電駆動力 [uN] 0.005 0.004 ムーバ下辺 ムーバ上辺 下辺ー上辺 0.003 0.002 0.001 0 -0.001 1 2 3 4 5 重なり [um] 周囲に導体のないシンプルな1電極対モデルでは、静電駆動力が電極重 なりに応じて、単調減少となり、重なり5um(電極対がアライン)で、静電駆 動力がゼロとなっており、良好な結果となった。 11 解析事例紹介2 重なりー静電駆動力、1電極対モデル、ステータ側 1電極対、重なりー静電駆動力、ステータ 0.006 静電駆動力 [uN] 0.005 0.004 ステータ上辺 ステータ下辺 上辺ー下辺 0.003 0.002 0.001 0 -0.001 1 2 3 4 5 重なり [um] ステータ側の静電力は、180度回転対称なため、前のスライドのムーバの 静電力の結果とほぼ同一となり、良好な結果となった。 重なりー静電駆動力、3電極対モデル、ムーバ側 静電駆動力 [uN] 重なりー静電駆動力 0.0045 0.004 0.0035 0.003 0.0025 0.002 0.0015 0.001 0.0005 0 -0.0005 0 -0.001 下辺 上辺 右下上辺 下辺ー上辺ー右下上辺 1 2 3 4 5 重なり [um] 3つ前のスライドでのFA-FB-FCを計算した。水色の線の静電駆動力の合計 値が単調減少の予想に合致せず、上下している。重なり5umで、電極が 完全にアラインしているとき、静電駆動力が完全にゼロになっていない。こ れは、右上導体の下辺の静電力を考慮すれば、上下の導体の位置が線 対称なため、キャンセルし、ゼロになるであろうと思われる。 12 解析事例紹介2 重なりー静電駆動力、3電極対モデル、ステータ側 静電力 [uN] ステータ上辺と下辺の静電力 0.01 0.009 0.008 0.007 0.006 0.005 0.004 0.003 0.002 0.001 0 ステータ上辺 ステータ下辺 上辺ー下辺 静電駆動 力 1 2 3 4 5 重なり [um] 作用反作用の原理より、ステータ側で、静電力の上辺ー下辺を計算しても、 静電駆動力が得られると考えられる。しかし、重なり1∼4umで、静電駆動 力がわずかに増加しているのが、予想に反し、理解できない。メッシュサイ ズによっても、合計が若干変化するので、誤差と見られる。 まとめ ・1電極対モデルで、重なりー静電駆動力の良好なグラフが得られた。 ・3電極対モデルでは、上下したり、右上がりの予想に合致しないグラフと なった。また、電極がアラインしているとき、静電駆動力が完全にゼロになっ ていない。これは、絶対値の小さな値とびが合計に含まれていることや、周 囲に複数の電極がある(特に近隣の右下導体)、やや複雑なモデルのため、 誤差が増しているかと推測される。 ・重なり1umのときの静電駆動力を比較すると、 0.0045 uN @ 1電極対モデル 0.002 uN @ 3電極対モデル と値の相違が見られる。 グラフのきれいさから、1電極対モデルを採用したい。しかし、3電極対モ デルは実際の電極配置により近く、近隣の電極の存在を考慮している。よっ て、3電極対モデルについても、今後さらに計算を進めて、検討していく。 13
© Copyright 2026 Paperzz