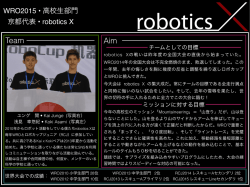
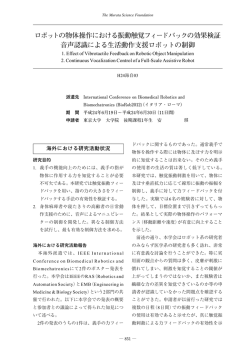
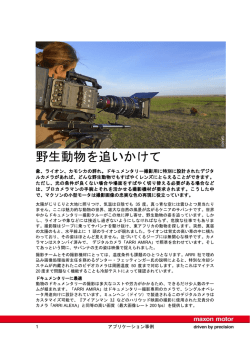
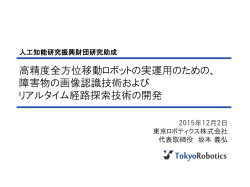
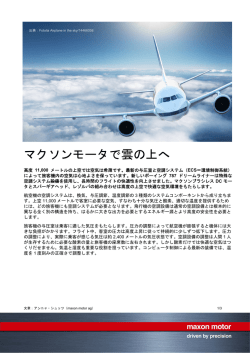
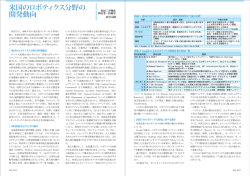
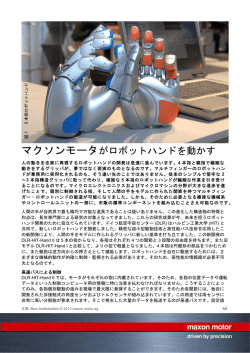
図 1:OC Robotics のスネークアームロボット © 2012 OC Robotics ヘビ型アームロボットが狭いスペースに舞う ヘビのように鋭敏な動きのロボットは、どんな小さな隙間も隅から隅まで探索することができます。人 間には手の届かない場所でも、ロボットなら難なく入り込んで問題を解決します。航空機の組み立てで も、原子力発電所や下水道の点検の場合でも、マクソンモータはヘビ型アームロボットの多関節アーム を正確に動かします。 まるで SF 映画のワンシーンのように、ヘビ型アームロボットは狭い穴の中をくねくねと前進します。 このロボットのタスクは、人間の到達不可能な場所の安全点検とビデオ撮影です。非常に狭くて危険な 場所は、あらゆる分野のいたるところにあります。人間が入ることの困難な狭い空間やそこにある装置 は、頻繁に点検する必要があります。英国ブリストルの OC Robotics 社は、動物を見本としたヘビ型ア ームロボットを開発しました。社長のロブ・バッキンガム氏と技術主任のアンドリュー・グラハム氏は 2001 年に最初のプロトタイプを開発しました。現在にいたるまでヘビ型アームロボットの技術はさら に完成の域に近づけられています。1997 年に設立された同社は、限られた空間や危険な環境に特化し たヘビ型ロボットを製造しています。非常にスリムでフレキシブルなデザインのヘビ型アームロボット は、小さな隙間や柔らかい障害物にも臨機応変に対応します。 ヘビ型アームロボットは、航空機や宇宙船の組み立て、原子力分野、医療技術、セキュリティ分野など に活用されています。カスタマの要求に応じて、長さや直径をカスタマイズできます。標準サイズは直 径 40~150 mm、長さは 1 m~3.25 m の範囲内ですが、要望があれば、長さ 10 m、直径 12.5 mm まで の仕様が可能です。アームの直径を大きくすればより重い物を持ち上げることができ、直径により機能 は決定されます。 文章:アンニャ・シュッツ(maxon motor ag) 1/4 アプリケーション事例 ロボット分野:ヘビ型アームロボット 2012 年 10 月 11 日 それぞれのアームは、使用分野に応じてカスタマイズして製 造されます。さらにこのロボットの「頭部」には、さまざま なツールを装備することができます。OC Robotics は目視検 査のために適切な照明やカメラ、金属やコンクリートを切断 するための特殊な工具やレーザーなどのツールも用意してい ます(動画参照)。用途に応じて、ヘビ型アームロボットは 産業ロボットやクレーンといった可動設備や固定設備に取り 付けることができます。 いつでもまっすぐ前進 ヘビ型アームは状況下における直接のサポートがなくても、 あらゆる点検や保守作業を行うことが可能です。その際、ロ ボットは使用環境からの直接のサポートを必要とせず、外部 から自由に操作することができます。ロボットの制御に使用 されるのは専用のソフトウェアで、「直感に従う」という原 則に則って動かすことができます。コマンドはヘビ型アーム の先端にコントローラで送られ、その後各ジョイントはその 軌道に追従します。障害物を避けるように命令すれば、スネ ークアーム全体が障害物を避けるのです。「この技術のおか げで、危険な環境の中での作業がはるかに容易になりました が、それでもまだ人間の作業を完全に排除することはできま せん。」と、OC Robotics 社代表取締役ロブ・バッキンガム 氏は語ります。 図 2:全長 2.5 m の可動キャタピラ式のロボ ットアームは、重さ 25 kg の荷物を運ぶこと ができます。 © 2012 OC Robotics しなやかな動きのためのブラシレスマクソン DC モータ 人間の腕の場合、腱が筋肉を関節と繋いでいますが、ヘビ型アームロボットにおいてはワイヤロープが 腱のようにロボットの各関節に繋がっています。ヘビ型アーム内部の各ワイヤは、それぞれ 1 個の maxon モータと繋がっています。ヘビのようなくねくねとした動きは、アームの各ジョイント部分にモ ータが機械的な動力を伝えることによって生まれます。バージョンに応じて最大 50 個のマクソンモー タが内蔵されています。モータはアームの中ではなくロボット本体のアクチュエータパックに集約され ています。これにより、モータと電子機器へのアクセスが容易で、制限された領域や危険な環境にモー タが直接さらされないのが利点です。モータ はまた、ヘビ型アームヘッドの各種ツールに も用いられています。 1~2 個のマクソンモータが、カメラやグリッ パーアームなどの動きを担います。 ドライブへの最大の課題は、コンパクトな設 計でも十分な高出力を提供しなければならな いことです。そこで、高度に複雑な用途には、 ブラシレスマクソン DC モータ EC-max 30 (60 W) とセラミックバージョンのプラネタリ ギアヘッド GP 32 が使用されました。 図 3:個々のワイヤロープはロボットの本体内部でそれぞれ 1 個のモータとつながっています。 © 2012 OC Robotics 文章:アンニャ・シュッツ © maxon motor ag 2012 2/4 アプリケーション事例 ロボット分野:ヘビ型アームロボット 2012 年 10 月 11 日 ブラシレス設計により電子整流 DC モータ(EC)は長時間でも安定して使用することができます。マク ソンモータの心臓部となるコアレス巻線によって、コギングのないトルク、高効率、卓越した制御力と いった、物理面でのメリットがもたらされました。ヘビ型アームロボットに使用されるモータには特別 なカスタマイズが必要でした。特殊なケーブルと固定用の穴が必要で、マクソンモータプラネタリギア ヘッドはアプリケーションのためにカスタマイズされ、また同様に、特別なハウジングがブレーキ用に 開発されました。OC Robotics 社にとって信頼性の高いモータ、きめの細かいカスタマサポート、高品質·小 型高出力がマクソンモータを選択するための判断基準となりました。 文章:アンニャ・シュッツ(maxon motor ag 編集部) Applikationsbericht: 2575 Zeichen, 2224 Wörter, 9 Abbildungen 図 4:ヘビ型アームロボットのレーザーツール にとって、ワイヤ切断はお手のもの。 © 2012 OC Robotics 図 6:安全技術での活用向けに開発されたモバイ ルミニ内視鏡 © 2012 OC Robotics 文章:アンニャ・シュッツ © maxon motor ag 2012 図 5:ヘビ型アームロボットの照明・イメージツー ルにはマクソンモータが搭載されています。 © 2012 OC Robotics 図 7:カナダ・ピカリング(オンタリオ州) 原子力発電所の原子炉の検査 © 2012 OC Robotics 3/4 アプリケーション事例 ロボット分野:ヘビ型アームロボット 2012 年 10 月 11 日 図 9:マクソン自己支持型コアレス巻線 © 2012 maxon motor ag 図 8:マクソンモータブラシレス DC モータ EC-max 30 (60 W) © 2012 maxon motor ag 詳細については下記までお問い合わせください。 maxon motor ag Brünigstrasse 220 Postfach 263 CH-6072 Sachseln, Switzerland OC Robotics Unit 5, Abbey Wood Business Park Emma-Chris Way, Filton Bristol, BS34 7 JU, UK Tel. Fax Web Tel. Fax Web +41 41 666 15 00 +41 41 666 16 50 www.maxonmotor.com +44 117 314 4700 +41 117 314 4799 www.ocrobotics.com 動画で見るレーザーツール付スネークロボット 文章:アンニャ・シュッツ © maxon motor ag 2012 4/4
© Copyright 2026 Paperzz