No.131 2014. 2
No.131 February 2014
静的情報試験を用いた
ダウンリンク航空機動態情報有効性評価 ………………………… 1
DAPs (Downlink Aircraft Parameters)
Validation using Static Value Test Methodology ………… 1
松永 圭左,瀬之口 敦,古賀 禎
Keisuke MATSUNAGA,Atsushi SENOGUCHI,Tadashi KOGA
第 一 三 一 号
No.131
2014. 2
No.131
February 2014
静的情報試験を用いた
ダウンリンク航空機動態情報有効性評価
松永
圭左*,瀬之口
敦**,古賀
禎*
DAPs (Downlink Aircraft Parameters) Validation
using Static Value Test Methodology
Keisuke MATSUNAGA, Atsushi SENOGUCHI, Tadashi KOGA
Abstract
Downlink Aircraft Parameters (DAPs) is one of Secondary Surveillance Radar (SSR) Mode S data-link functions. It enables a
ground station to obtain real-time aircraft information such as selected altitude and ground speed. That information provides air
traffic controllers with advanced situational awareness, or can be used to improve trajectory estimation for Trajectory Based
Operation. Therefore, DAPs is expected to enhance safety and efficiency of Air Traffic Control (ATC) service.
To employ DAPs for ATC service, the reliability of DAPs is important. However, some aircraft are transmitting erroneous
DAPs data. It is necessary to ensure the reliability of DAPs.
To apply traditional on-the-ground testing methodology for DAPs validation entails difficulties to cope with the complexity and
variety of aircraft equipment, completeness of test patterns, simulation of airborne status, and immediacy of anomaly detection.
Responding to these drawbacks, Massachusetts Institute of Technology (MIT) Lincoln Laboratory developed a DAPs validation
system with new methodologies. The system monitors data downlinked from actual aircraft to detect erroneous DAPs data. The
methodology can process a large amount of data in a short time and detect anomalies in real time.
Preparing for the deployment of DAPs function in Japan, Electronic Navigation Research Institute (ENRI) is conducting
development of a DAPs validation system. In the first phase of the development, one technique of MIT methodologies has been
implemented. The technique is static value test methodology. The tests examine that DAPs data are in conformance with
International Civil Aviation Organization (ICAO) provisions to detect erroneous data. To verify the effectiveness of the technique,
static value tests were applied to the actual DAPs data collected at our experimental SSR Mode S ground station. Erroneous data
were detected with the technique of static value tests. The effectiveness of the technique was verified for enhancement of the
reliability of DAPs data.
*監視通信領域
**航空交通管理領域
ENRI Papers No. 131 2014
1
1.
ンカーン研究所が開発した DAPs 有効性評価システムで
はじめに
用いられている手法(以下,MIT 手法)の利用を検討し
DAPs (DAPs; Downlink Aircraft Parameters) は,SSR
ている。上述の AMP 等の報告には,異常検出手法の詳
(二次監視レーダ; Secondary Surveillance Radar)モー
細な記述がないが,MIT 手法に関しては内容が詳述され
ドSのデータリンク機能を用いて,機上の動態情報を地
ている。また,MIT 手法は,DAPs データに対し 44 項目
上にダウンリンクする機能である。動態情報には,航空
の試験を実施するものであり,この試験で用いられてい
機の磁方位,指示対気速度,対地速度,ロール角等の状
る ICAO 規定との比較およびレーダ測位値との比較手法
態情報,および選択高度等の意図情報が含まれる。DAPs
は異常検出手法として妥当なものである。この手法は,
を航空交通管制(ATC; Air Traffic Control)に利用するこ
従来の地上試験方式の問題を解消し,多数の航空機から
とにより,管制官の状況認識の向上,音声通信量の低減,
収集した DAPs データの異常検出結果を短時間に評価可
トラジェクトリ予測精度改善が可能となり,航空交通の
能とするものである。飛行中の航空機からダウンリンク
交通量増大への対応および安全性向上が期待されている
したデータを用いることから,異常データを即時に検出
[1][2]。
可能であることも利点である。
DAPsの活用は欧州を中心に進められており,欧州の主
本稿では,MIT 手法における異常検出試験を,飛行中
要な空域ではモードS対応機上装置の航空機への搭載義
は変化しない値に対して実施される静的情報試験と,飛
務化が始まっている[3]。日本では2003年以降,SSRモー
行中に変化する値に対して実施される動的情報試験に大
ドSの運用が開始されている[4]。2013年時点では,DAPs
別した。静的情報試験で異常が検出された DAPs データ
の航空管制への導入の検討が進められている状況である。
に含まれる動的情報は信頼性が確保されていないため,
DAPsを航空管制に利用するためには,その信頼性が重
当該動的情報に対する動的情報試験は実施されない。し
要である。DAPsデータの信頼性に関して,国際民間航空
たがって,静的情報試験による異常検出結果は,動的情
機関(ICAO; International Civil Aviation Organization)の
報試験を実施するための前提条件となる。このため,当
作業部会において,異常データの存在およびDAPs導入時
初の目的として,本稿では静的情報試験を対象とした。
MIT手法を実データに適用した結果に関しては,詳細
の課題が指摘されている[5]。
これらの課題に対処する方法として,従来の地上での
な報告がなされていない。このため,MIT手法を実デー
機上装置の単体試験およびシステム全体の試験を適用す
タに適用した場合に,異常データの検出が可能であるこ
る方式は,以下の要因による困難さが伴う。即ち,機上
とを検証する必要がある。そこで,当所で開発中のDAPs
装置の複雑性,機上装置の多様性,試験項目の網羅性,
有効性評価システムにMIT手法に含まれる静的情報試験
飛行状態の実現性,即時性が問題となる[6]。
を実装し,当所のSSRモードS実験局で収集したDAPsデ
これらの問題に対応するため,飛行中の航空機からダ
ータに対して静的情報試験を実施した。本稿では,異常
ウンリンクしたデータをモニタし,異常データを検出す
検出結果として異常発生頻度および異常発生航空機数を
るシステムの開発が進められている。欧州では,
示し,静的情報試験により異常検出が可能であることを
Eurocontrol の AMP(Airborne Monitoring Project)において
示す。さらに,異常発生の原因についての分析を行う。
評価が行われており[7],モニタ結果は ICAO の作業部会
これにより,静的情報試験によるDAPsデータの信頼性向
においても報告されている[8]。米国では,マサチューセ
上が可能であることを示す。
ッツ工科大学(MIT; Massachusetts Institute of Technology)
リンカーン研究所が DAPs の有効性を評価するシステム
本稿の構成は以下のとおりである。2節でSSRモードS
による動態情報ダウンリンクの概要を述べる。3節で
の開発を実施している[6]。
日本でのDAPs導入に対応するため,電子航法研究所で
DAPs利用と課題について記述する。4節でMITリンカー
は,SSRモードS実験局を整備し,DAPsデータの収集を
ン研究所が開発した異常検出手法および異常検出のため
行っている。さらに,導入時のDAPsの信頼性向上のため
の静的情報試験を説明する。5節にて試験結果を示し,6
に,DAPsの有効性評価システムの開発を進めている。
節において考察を述べる。7節にて結論を記す。付録に,
静的情報試験の内容詳細を記述する。
評価システムの開発にあたり,DAPs データ中の異常
データを検出することにより有効なデータのみを抽出し
収集したデータの信頼性を確保するため,上述の MIT リ
2
-1-
電子研報告 No. 131 2014
2.
SSR モード S による航空機動態情報ダウンリンクの
番号(BDSコード)が指定されており,トランスポンダ
概要
は要求されたBDSレジスタのデータを応答信号に含めて
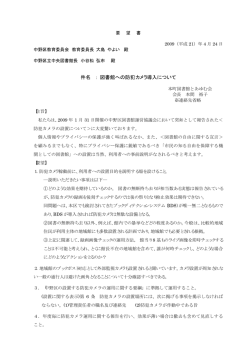
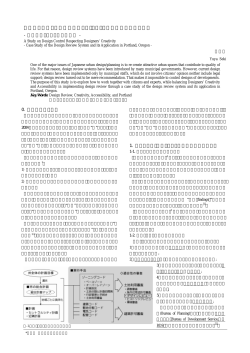
本節では,SSR モード S を用いた航空機動態情報のダ
返信する。
ウンリンク機能,および航空機動態情報が格納されてい
搭載されたトランスポンダの能力および機上装置の装
るトランスポンダ内の BDS(Comm-B Data Selector)レ
備状況により,ダウンリンク可能なデータは航空機毎に
ジスタについて説明する。
異なる。
地上のモードSセンサは,応答信号を受信し,CRC
2.1
(Cyclic Redundancy Check) 誤り訂正処理を行い,所望の
ダウンリンク機能
BDSレジスタのデータを得る[11]。
SSRモードSでは,地上のモードSセンサから送信され
た質問信号に応じて,機上のモードSトランスポンダが
2.2
応答信号を返す。航空機の動態情報を応答信号に含めて
BDS レジスタ
BDSレジスタのフォーマットは,ICAOで規定されてい
返信することにより,地上でのデータ取得が可能となる
(図 1)。
る[12]。2012年時点で52個のレジスタのフォーマットが
規定されている。
モードSトランスポンダには,固有のモードSアドレス
が割り当てられており,地上のモードSセンサは,特定
本稿での評価対象となる9個のBDSレジスタを表 1.に
の航空機に対し個別質問を行うことができる。動態情報
示す。各BDSレジスタのフォーマットのうち,試験に関
のダウンリンクには,GICB(地上喚起Comm-B; Ground
連する部分を付録に示す。
欧州では,基本監視(ELS; Elementary Surveillance)お
Initiated Communication-B)プロトコルを使用し,GICB
コントローラが指定した情報のGICB要求を行う[9][10]。
モードSトランスポンダには,BDSレジスタと称される
よび拡張監視(EHS; Enhanced Surveillance)と呼ばれる
データリンク機能への対応が段階的に義務化されており,
255個の記憶領域がある。1個のレジスタには56ビットの
2009年には主要な空域での義務化が完了している。ELS
データが格納される。各レジスタには,番号(16進数(hex)
では,BDS10/17/18/19の能力通報,およびBDS20の便名
標記で0x01から0xff;以下,BDSコードxxを用いてBDSxx
が必要である。EHSには,ELSに必要なレジスタに加え
と記す)が割り当てられている。モードSトランスポン
BDS40/50/60の動態情報が必要とされる。
な お , BDS 毎 に , 最 大 更 新 間 隔 が 定 め ら れ て お り
ダに接続されたセンサやFMS (Flight Management System)
からのデータは,割り当てられたBDSレジスタの領域に
[12-A.2.1],その2倍の時間(もしくは2秒のうち長いほう
記録される。地上からの質問には所望のBDSレジスタの
の時間)以上,当該レジスタのデータが更新されない場
合,データは無効となる。即ち,当該データが格納され
る領域は’0’に設定され,当該データの有効フラグが存在
する場合は,有効フラグが’0’に設定される。
航空機
トランスポンダ
BDSレジスタ
質問
BDS01
応答
FMS
表 1. BDS レジスタ
高度計
BDS02
気象計
・・・
・
BDSff
・
BDS
コード
(hex)
レーダ情報
収集データ
コントローラ
表示装置
記憶装置
図 1. モード S システム構成
ENRI Papers No. 131 2014
最大更新
間隔 [秒]
10
データリンク能力通報
4.0(#1)
17
GICB 能力通報
5.0
18
GICB 能力通報
5.0
19
GICB 能力通報
5.0
20
便名
15.0
30
ACAS RA(Resolution Advisory)
(#2)
40
選択高度意図
1.0
50
トラック・展開通報
1.3
60
針路・速度通報
1.3
#1:内容変更時は 1 秒以内([12-A2.1.2]参照)
#2:RA 発生・終了時の規定に従う([9-4.3.8.4.2.2]参照)
モードSセンサ
GICB
内容
-2-
3
3.
4.
DAPs 利用と課題
本節では,DAPsのATCへの利用について述べ,導入時
MIT リンカーン研究所開発の DAPs 有効性評価手法
本節では,4.1 項で従来の地上試験による異常検出手
法を DAPs 有効性評価に適用した場合の問題点を記述す
の課題を解説する。
る。4.2 項で,従来手法の問題点に対処するため MIT リ
3.1
DAPs 利用
ンカーン研究所が開発した DAPs 有効性評価手法を概説
DAPsにより,機上の動態情報が地上で取得可能となる。
取得した動態情報をATCに利用することは,効率性や処
する。4.3 項で,MIT 手法のうち,本稿の対象となる静
的情報試験の内容を記述する。
理容量の向上,および安全性の向上に寄与する。
4.1
現状では,航空機の磁方位や指示対気速度/マッハ数
従来の地上試験の問題点
などを地上側で把握するには,管制官とパイロット間の
米国の MIT リンカーン研究所は,従来の地上における
無線通信を用いている。DAPsを用いることにより,これ
機上装置の単体試験およびシステム全体の試験を適用す
らの情報取得が自動化され,作業負荷が低減される。
る異常検出手法に対して,以下の要因による困難さが問
題となることを指摘している[6]。
また,選択高度情報に関しても,音声による確認のた
・
めの管制官の作業量が低減することに加え,コンフリク
機上装置の複雑性
DAPs に関連する機上装置は,各種のセンサ
ト予測検出手法に用いることにより,安全性の向上にも
類,FMS,MCP (Mode Control Panel),トランス
寄与することになる[13]。
ポンダ,インタフェース装置等,多数の機器か
さらに,動態情報をトラジェクトリ予測に用いること
ら構成されており,複雑である。
により予測精度が改善し,空域容量の増大および安全性
・
の向上が可能となる[2][14]。
機上装置の多様性
個々の航空機によって,機器および構成が異
3.2
DAPs 導入時の課題
なる。
DAPsを航空管制に利用するためには,その信頼性が重
・
試験項目の網羅性
要になる。しかしながら,欧州でのDAPs運用開始後,以
装置の複雑さにより,試験項目の組合せパタ
下のような不正確または誤情報データ,不具合等が報告
ーンが多岐にわたる。また,網羅することが困
されている[5]。
難である。
・
便名情報の誤り
・
便名情報が無い,または送信されない
・
気圧高度が不正確
を模擬することに限界があるため,実施可能な
・
選択高度が不正確または更新されていない
試験項目に制限がある。
・
飛行状態の実現性
地上試験では,実際の飛行状態と同様の状態
異常データの発生原因として,機上装置の故障,不適
・
即時性
切な設定,データ処理時または通信時のエラー,等が考
運用中の航空機で不具合が発生した場合に検
えられる[15][16]。
出できない。
現在,DAPsデータが正確であることは十分に保証され
これらの問題に対処するために,MIT リンカーン研究
ていない。このため,不正確なデータが発生することが
所は,飛行中の航空機からダウンリンクした DAPs デー
課題として指摘されている。この課題に対処するために,
タを分析し,異常データを検出する手法を提案している。
欠陥のある機器を特定すべきことが提言されている[5]。
4.2
しかしながら,従来の地上試験による異常検出手法に
MIT リンカーン研究所の DAPs 有効性評価手法
は後述の問題点が存在する。この問題に対応するため,
MIT リンカーン研究所の DAPs 有効性評価システムで
欧州及び米国では,飛行中の航空機からダウンリンクし
は 44 項目の異常検出試験を実装している(表 2参照)。
たデータをモニタし,異常データを検出するシステムの
本稿では,試験項目を静的情報試験と動的情報試験に分
開発が進められている。次節において,従来手法の問題
類した。
点および米国MITリンカーン研究所が開発した異常検出
静的情報試験は,機器の故障等で機上装置の状態が変
手法について解説する。
わらない限り,飛行中は変化しない値に対して実施され
る。静的情報試験は 29 項目あり,機上装置の構成状態,
4
-3-
電子研報告 No. 131 2014
通報能力等の情報が ICAO の規定[12]に従った値である
れる。動的情報試験は 15 項目あり,航空機の速度やロー
ことを確認する試験である。
ル角などの値が,レーダ測位値から算出される値と一致
動的情報試験は,飛行中に変化する値に対して実施さ
していることを確認する試験である。
表 2. MIT リンカーン研究所の DAPs 有効性評価試験項目
試験
番号
対象
試験内容
静的/動的
属性
試験
実施/未実施
TM01
CA Field
4 以上
静的
未
TM02
TM03
TM04
TM05
TM06
TM07
TM08
TM09
TM10
TM11
TM12
TM13
TM14
TM15
TM16
TM17
TM18
TM19
TM20
TM21
TM22
TM23
TM24
TM25
TM26
BDS18
BDS18
BDS18
BDS18
BDS19
BDS19
BDS19
BDS17
BDS17
BDS17
BDS17
BDS10
BDS10
BDS10
BDS10
BDS10
FS Field
FS Field
FS Field
FS Field
FS Field
BDS20
BDS20
BDS20
BDS20
BDS10 実装済み
BDS17 実装済み
BDS20 実装済み
BDS30 実装済み
BDS40 実装済み
BDS50 実装済み
BDS60 実装済み
BDS20 データ有効
BDS40 データ有効
BDS50 データ有効
BDS60 データ有効
BDS コード=0x10
モード S サブネットバージョン=3,4
モード S 固有サービス能力フラグ=有効
便名情報能力=有効
SIC(監視識別コード)能力=有効
Mode 3/A 警報発生時の FS 値
飛行状態時の速度と高度変化値の確認
地上運用時の速度と高度変化値の確認
飛行状態/地上運用の地表面高度との比較
SPI(Special Position Identification)情報との比較
BDS コード=0x20
文字コード=便名文字規約コード
スペース埋め
フライトプランの便名情報との比較
静的
静的
静的
静的
静的
静的
静的
静的
静的
静的
静的
静的
静的
静的
静的
静的
動的
動的
動的
動的
動的
静的
静的
静的
静的
実施
実施
実施
実施
実施
実施
実施
実施
実施
実施
実施
実施
実施
実施
実施
実施
未
未
未
未
未
実施
実施
実施
未
TM27
TM28
TM29
TM30
TM31
TM32
TM33
TM34
TM35
TM36
TM37
TM38
TM39
TM40
TM41
TM42
TM43
TM44
BDS30
BDS40
BDS40
BDS40
BDS50
BDS50
BDS50
BDS50
BDS50
BDS50
BDS50
BDS60
BDS60
BDS60
BDS60
BDS60
BDS60
BDS60
BDS コード=0x30
1個以上のフラグが有効
予約領域='0'
無効データ領域='0'
1個以上のフラグが有効
無効データ領域='0'
ロール角をレーダ測位値から求められた値と比較
真トラック角をレーダ測位値から求められた値と比較
対地速度をレーダ測位値から求められた値と比較
トラック角変化率をレーダ測位値から求められた値と比較
真対気速度をレーダ測位値から求められた値と比較
1個以上のフラグが有効
無効データ領域='0'
磁方位をレーダ測位値から求められた値と比較
指示対気速度をレーダ測位値から求められた値と比較
マッハ数をレーダ測位値から求められた値と比較
気圧高度変化率をレーダ測位値から求められた値と比較
慣性垂直速度をレーダ測位値から求められた値と比較
静的
静的
静的
静的
静的
静的
動的
動的
動的
動的
動的
静的
静的
動的
動的
動的
動的
動的
実施
実施
実施
実施
実施
実施
未
未
未
未
未
実施
実施
未
未
未
未
未
ENRI Papers No. 131 2014
-4-
5
5.1
これらの試験を用いた異常検出を行うことにより,従
電子航法研究所モード S 実験局
来の地上における機上装置の単体試験およびシステム全
電子航法研究所では,GICB 機能を持つ SSR モード S
体の試験を適用する異常検出手法に比して,多数の航空
地上局を整備し,運用している。実験システムは,地上
機から収集した DAPs データの異常検出結果を短時間に
局本体,GICB コントローラ,レーダ情報表示装置,収
評価することが可能となる。また,機上装置から送信さ
集データ(ASTERIX 形式データ[17])記憶装置等から構
れたデータに対し試験を実行するため,前項で述べた機
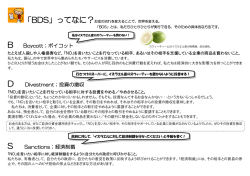
成される(図 1)。設置場所は調布本所であり,周期は
上装置の複雑性,多様性,試験項目の網羅性,および飛
10 秒,覆域半径は最大 250NM である。覆域には,東京
行状態の実現性の問題点により確認できなかった異常デ
国際空港および成田国際空港のターミナルエリアが含ま
ータを検出することが可能となる。さらにリアルタイム
れており,国内で最もトラフィックの多い空域をカバー
処理化して実装することにより,実運用中の航空機の
している(図 2)。
レーダ地上局の 1 スキャンにおける 1 ターゲット航空
DAPs データの異常を即時に検出可能であるため,前項
機のデータ(以下,ターゲットデータ)には,モード S
の即時性の問題点に対処できる。
実験局で受信した際の時刻,ターゲットである航空機の
4.3
静的情報試験による DAPs 有効性評価
レーダ測位値・高度,モード S アドレス,BDS レジスタ
文献[12]には,各 BDS レジスタのフォーマットおよび
値等が含まれる。
レジスタに格納されている個々の情報の内容が規定され
5.2
ている。静的情報試験では,ダウンリンクした BDS レジ
データ取得
スタの情報(パラメータ)と,規定された値に従ってい
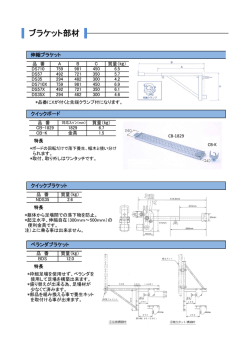
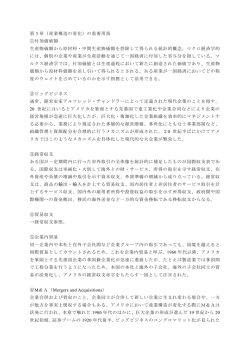
GICB コントローラは,図 3に示す手順(本報告に関
ることを確認し,規定に従っていないデータを異常とし
連する部分)に従って,ターゲット航空機に対して個別
て検出する。
GICB 要求質問を行い,動態情報をダウンリンクする。
DAPs の有効性評価システムを開発するにあたり,MIT
SSR モード S 地上局は,航空機を初期捕捉すると,デ
リンカーン研究所が開発した静的情報試験項目のうち
ータリンク能力通報(BDS10)要求を行う。続いて,GICB
27 項目を実装した。対象となっているレジスタは,
能力通報 BDS18,BDS19,および BDS17 を要求し,タ
BDS18/19/17/10(機上装置の構成状態およびサービス能
ーゲット航空機の詳細なデータリンク能力情報を得る。
力情報に関するレジスタ),BDS20(便名情報),BDS30
ダウンリンクした BDS17 の内容を解読し,EHS で必
(ACAS RA),BDS40/50/60(主要動態情報レジスタ)
要とされる BDS40/50/60 の全ての有効データフラグが’1’
である。
ダウンリンクした BDS レジスタの内容が規定に従っ
ている場合,試験結果は正常(合格)となり,規定に従
っていない場合,試験結果は異常(不合格,エラー)と
なる。
本稿では,MIT リンカーン研究所が開発した異常検出
試験項目の番号を TMxx(xx は数字)と記す。本稿の対
象となる試験項目は,表 2の「試験 実施/未実施」の
項が「実施」となっている項目である。
各試験項目の詳細は,付録に記述する。
5.
静的情報試験結果
本節では,電子航法研究所のSSRモードS実験局の概説
およびデータ取得の手順を5.1項および5.2項で説明し,
5.3項で収集データに対して実施した静的情報試験の結
果を示す。
図 2. 調布実験局の監視覆域
(内側から高度 1 万,2 万,3 万,4 万フィートの覆域)
6
-5-
電子研報告 No. 131 2014
である場合に,該当航空機に対する BDS40/50/60 要求質
静的情報は,基本的には各航空機では変化しないとの
前提で,航空機毎に試験結果を分析した。
問をスキャン毎に行う。
試験結果を表 3に示す。表には,
BDS30 に関しては,SSR モード S センサが受信した航
空機からの応答に含まれる ACAS 回避アドバイザリ
・
試験を実施した総回数・異常結果回数
(RA; Resolution Advisory)の発生情報をもとに,RA 発
・
試験を実施した航空機数・異常結果が 1 回以上発
生 時 に BDS30 要 求 質 問 を 行 い , デ ー タ を 取 得 す る
生した航空機数・試験結果が全回異常(航空機で
[9-4.3.11.4]。
一貫した異常)であった航空機数
なお,同一スキャン中に 1 ターゲット航空機から複数
が示されている。
の BDS レジスタのデータをダウンリンクすることが可
5.3.1
能である。この場合,1 ターゲットデータにはダウンリ
ンクした複数の BDS レジスタのデータが含まれる。
BDS に共通する異常
BDSレジスタのデータ全56ビットが’0’になっている事
(以下,ゼロBDS)により試験結果が異常となる事例が
5.3
試験結果
確認された。これらは,データ処理時または通信時に発
当所のモードS実験局で収集したDAPsデータに対して,
生したエラーによるものと考えられる。全データ中の
BDSレジスタデータの総数が約1億に対し,ゼロBDSレジ
前節で記述した静的情報試験を実施した結果を示す。
試験には,2011 年 6 月から 2012 年 10 月(1 年 5 ヶ月
スタ数は約3,000(約0.003%)であった。
なお,表 3の結果には,上記のゼロBDSによる異常が
間)に収集されたデータを使用した。試験実行に要した
処理時間は,数時間程度であった。
含まれている。
試験の対象は,EHSに対応している航空機からのDAPs
5.3.2
とした。すなわち,BDS17内のBDS40, BDS50, BDS60の
BDS18/19/17/10 に関する試験結果
有効データフラグが’1’である航空機からのみのDAPsデ
(1) 偶発的な異常
ータに対する試験結果を示す。対象となったデータは,
偶発的な異常(各航空機に対して複数回試験を実施し
航空機数3,196機の約4千万ターゲットデータから成る。
た結果,正常と異常の両方の結果があった場合)が確認
さ れ た 航 空 機 が 存 在 し た 試 験 は , <TM04>, <TM05>,
<TM09>, <TM16>であった。
(2) 航空機で一貫した異常
モードS機捕捉
航空機で一貫した異常(各航空機に対して,複数回試
験を実施した結果が全て異常であった場合)が確認され
BDS10要求
た航空機が存在した試験は,<TM04>, <TM05>, <TM09>,
BDS18要求
<TM15>, <TM16>であった。
モードS特有サービス能力(<TM15>)の試験結果に関
BDS19要求
しては,試験結果が異常であった全ての航空機(試験実
BDS17要求
DAPs能力あり?
行回数が1回のみの航空機を含む)では,一貫して異常
No
値(=‘0’)が設定されていた。
(3) BDS20/30に関するデータの異常
通常監視
Yes
BDS20(便名情報)に関する試験(<TM04>, <TM09>,
DAPs航空機数<N
No
<TM16> ) お よ び BDS30 ( ACAS RA ) に 関 す る 試 験
(<TM05>)の異常は,他の試験項目に比べ高い割合で
Yes
覆域内?
No
確認された(総航空機数約3,200機に対し,異常発生航空
要求停止
機数が60機(<TM04>), 116機(<TM09>), 104機(<TM16>),
Yes
517機(<TM05>))。
BDS40/50/60/05要求
(4) BDS10:モードSサブネットバージョンの異常
試験番号<TM14>は,BDS10中のモードSサブネットバ
図 3.
GICB 要求質問の手順
ENRI Papers No. 131 2014
ージョンがDAPs対応のバージョン(3または4)で製造さ
-6-
7
れていることを確認する試験項目であるが,8割以上の航
に記述する。
(1) BDS20の異常値
空機で試験結果は異常であった。
<TM24>,<TM25>に関しては,文字コードが,’0’値(文
5.3.3
BDS20/30/40/50/60 に関する試験結果
字コードで便名用として規定されていない数値
[9-3.1.2.9])になっているものが多く確認された。
BDS30に関する試験<TM27>では,異常は発生しなか
った。その他のBDSレジスタに関する結果の詳細を以下
表 3. 静的情報試験結果
試験回数
対象
BDS
18
19
17
10
試験
番号
BDS10 実装済み
BDS17 実装済み
BDS20 実装済み
BDS30 実装済み
BDS40 実装済み
BDS50 実装済み
BDS60 実装済み
BDS20 データ有効
BDS40 データ有効
BDS50 データ有効
BDS60 データ有効
TM13
BDS コード=0x10
モード S サブネットバージョン
=3,4
モード S 固有サービス能力
=有効
便名情報能力=有効
SIC 能力=有効
BDS コード=0x20
文字コード
=便名文字規約コード
スペース埋め
BDS コード=0x30
1個以上のフラグが有効
予約領域=’0’
無効データ領域=’0’
1個以上のフラグが有効
無効データ領域=’0’
1個以上のフラグが有効
無効データ領域=’0’
TM15
TM16
TM17
TM23
TM24
30
40
50
60
試験内容
TM02
TM03
TM04
TM05
TM06
TM07
TM08
TM09
TM10
TM11
TM12
TM14
20
総回数
TM25
TM27
TM28
TM29
TM30
TM31
TM32
TM38
TM39
309,931
316,491
321,238
航空機数
異常回数
総航空機数
9
9
3,125
14,277
18
18
18
4,561
12
12
12
異常発生
航空機数
8
8
60
517
14
14
14
116
8
8
8
1
1
19
435
4
4
4
26
3
3
3
0
0
0
299,958
2,571
2,418
11
11
104
1
30
24
1
11
133
22
3
0
69
9
9
63
5
65
5
0
0
2
0
0
1
0
3
0
356,201
156
3,190
3,192
3,192
3,196
4,587
1
2,365
408,112
全試験
異常発生
航空機数
3,458
12
0
507
430
430
289
11
292
10
626
37,825,320
37,834,638
37,832,215
3,187
106
3,194
3,193
3,190
表 4. BDS スワップ発生例
スキャン時刻
BDS05
BDS40
BDS50
BDS60
8
08:05:35
605f80c056966f
a3280030a40000
fff8cf1f800489
cc299f1b7ffc00
08:05:45
a3280030a40000
a3280030a40000
a3280030a40000
cc399f1b600401
-7-
08:05:55
605f845303ce8d
a3280030a40000
ffb8cf1f80048a
cc399f1ba00400
電子研報告 No. 131 2014
(2) BDS40/50/60の異常値
可能性が高い。
主要な動態情報レジスタであるBDS40/50/60レジスタ
(2) データ処理時・通信時のエラーによる異常
に関する試験では,若干数の異常値が検出された。異常
以下の異常はいずれも偶発的に発生しており,データ
値の検出時のデータによると,同一スキャンでBDS40/50
/60のレジスタをダウンリンクしている際に,他のレジス
処理時または通信時のエラーと考えられる。
タの値が別レジスタの値として処理されていた(BDSス
・ ゼロ BDS
ワップ)ことが分かった。BDSスワップ発生時のデータ
・ BDSスワップ
例を表 4に示す。この例では,ある航空機からの連続し
・ BDSレジスタデータの一部が異常な値になっていた
場合
た3回のスキャンでダウンリンクされたBDS40/50/60お
よびBDS05(拡張スキッタ・位置(飛行中)レジスタ)
航空機から地上のモード S センサへのダウンリンク
の値が示されている。時刻08:05:45でのBDS05/40/50(表
時には CRC 誤り検出処理が施されており,機上装置から
中の網掛された部分)の値が56ビット全てで同一であり,
地上装置間の通信エラーは排除されている。したがって,
BDSスワップが発生していることが分かる。
機上装置内もしくは地上装置内のデータ通信時またはデ
また,BDSスワップとは異なる原因の異常値が,BDS40
ータ処理時に異常が発生している可能性が高い。
に関する試験(<TM29>および<TM30>)において,1航
空機(2航跡)で検出された。(異常データの分析結果は
(3) 機上装置の不適切な設定による異常
次節にて詳述)
不適切な設定による異常は,大きく2種類に分けられ
る。
6.
(3-1) 機上装置の実装時の設定誤りによる異常
異常データ発生原因の考察
前節での静的情報試験の実施結果において異常が検出
航空機で一貫して発生している異常は,実装時の設定
できたことから,静的情報試験により DAPs データの信
誤りに起因すると考えられる。試験結果では,モード S
頼性向上が可能であることは確認された。その上で,異
サブネットバージョン,モード S 固有サービス能力フラ
常データが検出された場合に,機上装置の故障または不
グ,および BDS20/30 関連のデータ有効フラグ・実装済
適切な設定を検知・改修する等の対処を実施することは,
みフラグ等に関して発生していた。
DAPs を利用するシステム全体の性能向上につながる。
但し,航空機で正常と異常の両方の試験結果が存在す
異常発生時の対処方法を検討する上で,発生原因の特定
る場合も,フラグ設定のタイミングが規定どおりに実装
は重要な要素となる。また,発生原因に応じた異常検出
されていないことに起因することが考えられる。
手法を用いることは,DAPs データの信頼性向上のため
の異常検出性能の向上に寄与する。
単一の BDS レジスタデータに対する試験結果のみか
ら異常発生原因を特定することは困難である。このため,
航跡#1
航空機毎に時系列の異常発生状況(異常発生の偶発性ま
航跡#2
たは一貫性),および BDS レジスタ中の異常データの値
TM29
を分析することにより,異常発生原因を推定した。
(1) 機上装置の故障による異常
異常
合格
14:00
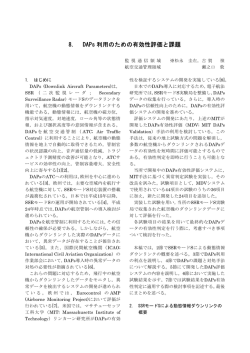
5.3.3 項で記した 1 航空機で検出された BDS40 の異常
15:00
16:00
17:00
18:00
試験期間中に 2 航跡のみが記録されており,1回目の航
跡(時刻 14:24~15:06)の大部分,および2回目の航跡
(時刻 16:39~15:11)の全部の BDS40 のデータに,異常
TM30
システム時刻 [時]
(<TM29>および<TM30>)を分析した。当該航空機は,
異常
合格
14:00
15:00
16:00
17:00
18:00
システム時刻 [時]
(’0’であるべきビットが’1’になっている異常)が発生し
ていた(図 4)。1回目の航跡中に一部正常なデータが
図 4. 故障が原因と推測される航空機の
記録されていたため,機上装置の故障による異常である
BDS40 に関する試験(TM29, TM30)結果(時系列)
ENRI Papers No. 131 2014
-8-
9
10
電子研報告 No. 131 2014
[15] O. Baud, N. Honoré, Y. Rozé and O. Taupin: ”Use of
Downlinked Aircraft Parameters in Enhanced Tracking
Architecture”, Aerospace Conference 2007, IEEE, Big
Sky, MT, Mar. 2007.
[3] EUROCONTROL: “Mode S Harmonisation of the
Transition Arrangements for State Aircraft, Process and
Procedures for the Managing of the Mode S Compliance
Status and the Exemptions Granted to State Aircraft”,
Edition 1.1, EUROCONTROL, Brussels, Aug. 2005.
[16] R. Wiken: “USAF Mode S Monitoring”, 2011 CNS/ATM
conference, Orland, FL, Jun. 2011.
[4] 国土交通省: “航空路監視レーダー(ARSR)等の配置及
び
覆
域 図
”,
http://www.mlit.go.jp/koku
/15_bf_000405.html, 参照 Dec. 2013.
[17] EUROCONTROL: “Eurocontrol Standard Document For
Surveillance
Data
Exchange”,
Edition
1.19,
EUROCONTROL, Brussels, Mar. 2011.
[5] C. Giligen: “Operational use of parameters and data made
available by Mode S Transponders”, WP ASP12-20,
ICAO ASP 12th WG Meeting, Montreal, Canada, April
2012.
http://adsb.tc.faa.gov/ICAO-ASP
[18] R. H. Saffell: “Issues With Mode S Subnetwork Version
Number in ICAO Annex 10 Amendment 77”, ICAO ASP
TSG
WP
ASP08-15,
Jan.
2010.
http://adsb.tc.faa.gov/ICAO-TSG/TSG19-Ft.Lauderdale-2
010/TSGWP08-15
Subnetwork_version_number_issue.pdf, 参照 Dec. 2013.
/ASP12-Montreal-12/WP
ASP12-20-Enhanced
operational use of MODE-S DAPs.pdf, 参照 Dec.
2013
[6] R.D. Grappel, G.S. Harris, M.J. Kozar, and R.T. Wiken:
“Elementary Surveillance (ELS) and Enhanced
Surveillance (EHS) Validation via Mode S Secondary
Radar Surveillance”, FAA ATC Report 337, Lincoln
Laboratory, Lexington, April 2008.
[19] RTCA SC-209: “Minimum Operational Performance
Standards for Air Traffic Control Radar Beacon System /
Mode Select (ATCRBS/Mode S) Airborne Equipment”,
DO-181E, RTCA, Washington, Mar. 2011.
[7] EUROCONTROL: “The "Mode S" Project - Mode S
Development
and
Experiments”,
http://www.eurocontrol.int/eec/public/standard_page
/proj_Mode_S.html, 参照 Dec. 2013.
[8] E. Potier: “Mode S fleet monitoring status in Europe”, ASP
TSG WP08-20, ICAO ASP Technical Sub Group,
Montreal,
Canada,
April
2012,
http://adsb.tc.faa.gov/ICAO-TSG/TSG19-Ft.Lauderdale-2
010/TSGWP08-20 Airborne fleet monitoring status in
Europe.pdf, 参照 Dec. 2013.
[9]
ICAO: “ICAO ANNEX 10 - Aeronautical
Telecommunications - Vol. IV (Surveillance Radar and
Collision Avoidance Systems)”, Fourth edition, ICAO,
Montreal, Jul. 2007.
[10] ICAO: “Manual of the Secondary Surveillance Radar
(SSR) Systems”, Doc 9684, Third edition, ICAO,
Montreal, Jan. 2004.
[11] 古賀,三吉,宮崎: “SSRモードSのデータリンク評価
試験の結果について”,電子航法研究所報告 No.96,
Jan. 2001.
[12] ICAO: “Technical Provisions for Mode S Services and
Extended Squitter”, Doc 9871, Second Edition, ICAO,
Montreal, 2012.
[13] 瀬之口,福田: “航空機の動態情報を利用するコンフ
リクト検出手法の研究”,電子航法研究所報告 No.122,
pp.39-51, Oct. 2009.
[14] A. Jennings: “Report on the Benefits of Using Airborne
Data in Controller Tools”, Episode 3 consortium, D6.3-02
version3.00, EUROCONTROL Experimental Centre, Dec.
2009.
ENRI Papers No. 131 2014
- 10 -
11
する機能や情報が有効な場合,当該フラグが適切に
付録.
設定されていることを確認する。
静的情報試験の内容
(例)
試験項目<TM15>
静的情報試験は,ダウンリンクした BDS レジスタの情
EHS 対応機は,モード S 固有サービスは有効
報(パラメータ)が,ICAO 規定値(文献[12])に従って
である。このため,BDS10 のモード S 固有サー
いることを確認し,規定に従っていないデータを異常と
ビス能力フラグが’1’(能力有り)であることを
して検出するものである。
確認する。
(iv) 有効データの存在確認
静的試験項目を試験の内容に応じて分類し整理した。1
項で,分類した 5 つのタイプを説明する。
BDS17 は,次項で示すように,各 BDS レジスタ
2 項で,各試験項目の内容について記述する。
に有効な情報が書き込まれていることを示すフラグ
<>で括られた記号は,試験項目番号を表す。試験内容
ビットから成る。BDS17 中の有効フラグが’1’に設定
されている BDS レジスタには,規定上,有効なデー
の分類のタイプは,1 項で示される(i)~(v)で表す。
各 BDS レジスタのフォーマットを別表 1 から 9 に示
タが存在する[12-A.2.2.1]。この場合,ダウンリンク
す。なお,各表のビット番号において,[a:b]の表記は
された当該 BDS に有効なデータが実際に存在する
ビット番号 a 番から b 番のビット領域を示す。
ことを確認する。
各試験内容の詳細は別表 10,11,12 に記述する。
(例)
試験項目<TM28>
BDS40 には,5 個のデータが含まれており,
1. 試験内容の分類
各データに対して有効フラグがある。BDS40 は,
BDS17 中の BDS40 有効フラグが’1’(有効なデ
静的情報試験を,5 つのタイプに分類した。以下に,
各タイプの説明および該当する試験項目の例を示す。
ータが存在している)の場合にダウンリンクさ
(i) 固定値の確認
れる。このため,ダウンリンクされた BDS40
中の少なくとも1つのデータ有効フラグが’1’
特定のビット領域には,固定値が入力される。こ
(有効)であることを確認する。
の場合,固定値が規定された値であることを確認す
(v) 無効データ領域・予約領域の値の確認
る。
(例)
BDS のデータ領域には,対応する有効フラグによ
試験項目<TM13>
BDS10 の[1:8]ビット領域には,固定値である
って有効/無効状態が示されるデータ領域,または
BDS コード’0x10’が入力されることが規定され
予約領域が存在する。無効データ領域(対応する有
て い る 。 こ の た め , BDS10 の 当 該 領 域 の 値
効フラグが’0’値になっているデータ領域)および予
が’0x10’であることを確認する。
約領域には,’0’値が設定されることが規定されてい
(ii) 規定された範囲内の値の確認
る[12-D2.2][19-2.2.26.2]。無効データ領域・予約領域
が’0’値になっていることを確認する。
特定のビット領域は,その値の範囲が規定されて
(例)
いる。この場合,値が規定の範囲内の値であること
BDS40 中のデータ有効フラグが’0’(無効)と
を確認する。
(例)
試験項目<TM30>
なっているデータ領域は,’0’であることを確認
試験項目<TM24>
BDS20 に含まれる 8 文字の便名文字は,アル
する。
ファベット,スペース,数字(0 から9)であ
2. 各試験項目の内容
る。各文字の値は,ICAO 規定の 6 ビット文字
以下,各 BDS に対する静的情報試験項目の内容と
コード値(10 進数標記で,1 から 26(アルファ
ICAO 規定の内容を示す。
ベット),32(スペース),48 から 57(数字),
のいずれかの値)となる[9-3.1.2.9]。各文字が,
規定された範囲内の値であること確認する。
(1) BDS18/19 の試験項目
(iii) 状態フラグの確認
12
BDS18/19 は,モード S 固有サービス GICB 能力通報
BDS レジスタ中のパラメータには,特定の機能や
(Mode S specific service GICB capability report)と称され
データの有効状態等を示すフラグが含まれる。対応
る。BDS18 は,BDS10 から 38 の各レジスタに関しての
- 11 -
電子研報告 No. 131 2014
実装状態を示すフラグビットから成る。BDS19 は,BDS39
BDS10 に対する試験として,以下の項目を実施する。
から 70 の各レジスタに関しての実装状態を示すフラグ
<TM13>
BDS コード = 0x10
ビットから成る。各フラグビットは,対応するレジスタ
<TM14>
モード S サブネットバージョン =3 または 4
に設定された後は,トランスポンダの電源を切るまで値
<TM15>
モード S 固有サービス能力 = 1
(分類:iii)
は保持される[12-A.2.5.4.2,D2.4.2]。
<TM16>
便名情報能力 = 1
(分類:iii)
<TM17>
SIC 能力 = 1
(分類:iii)
(分類:i)
(分類:ii)
にデータが書き込まれた際に’1’に設定される。一旦’1’
BDS18/19 のフォーマットのうち,試験に関連する部分
各試験内容の詳細を別表 10に示す。
を,別表 1および別表 2に示す。
EHS 対応機の場合,BDS10/17/20/30 および BDS40/50
/60 レジスタは実装されている。
BDS18/19 に対する試験として,以下の項目を実施する。
(a) BDS18 の試験項目
<TM02/03/04/05>
別表 1. BDS18 フォーマット(抜粋)
ビット番号
9
24
25
34
41
52
BDS10/17/20/30 実装フラグ = 1
(分類:iii)
(b) BDS19 の試験項目
<TM06/07/08>
BDS40/50/60 実装フラグ = 1 (分類:iii)
各試験内容の詳細を別表 10に示す。
(2) BDS17 の試験項目
別表 2. BDS19 フォーマット(抜粋)
BDS17 は , GICB 能 力 通 報 ( Common usage GICB
capability report)と称され,対応する BDS レジスタに,
有効な情報が書き込まれていることを示すフラグビット
から成る。各フラグビットは,対応するレジスタに有効
なデータが存在しない場合に’0’に設定され,書き込まれ
た場合に’1’に設定される[12-A.2.2.1, A.2.5.4.1]。
BDS17 のフォーマットのうち,試験に関連する部分を,
別表 3に示す。
EHS 対応機の場合,BDS20/40/50/60 レジスタには有効
なデータが存在する。
BDS17 に対する試験として,以下の項目を実施する。
<TM09/10/11/12> BDS20/40/50/60 有効データフラグ=1
(分類:iii)
各試験内容の詳細を別表 10に示す。
ビット番号
12
17
33
45
49
内容
BDS65 実装フラグ
BDS60 実装フラグ
BDS50 実装フラグ
BDS44 実装フラグ
BDS40 実装フラグ
別表 3. BDS17 フォーマット(抜粋)
ビット番号
1
7
8
9
13
16
24
内容
BDS05 有効データフラグ
BDS20 有効データフラグ
BDS21 有効データフラグ
BDS40 有効データフラグ
BDS44 有効データフラグ
BDS50 有効データフラグ
BDS60 有効データフラグ
別表 4. BDS10 フォーマット(抜粋)
(3) BDS10 の試験項目
BDS10 は,データリンク能力通報(Datalink capability
report)と称され,トランスポンダおよび関連機器の実装
状況やデータリンク能力の概要情報を有する。
BDS10 のフォーマットのうち,試験に関連する部分を,
別表 4に示す。
EHS 対応機の場合,モード S サブネットバージョンは
3 または 4 である。モード S 特有サービス能力,便名情
報 , SIC ( 監 視 識 別 コ ー ド ) 能 力 は 全 て 有 効 と な る
[19-2.2.24.3]。
ENRI Papers No. 131 2014
内容
BDS30 実装フラグ
BDS21 実装フラグ
BDS20 実装フラグ
BDS17 実装フラグ
BDS10 実装フラグ
BDS05 実装フラグ
- 12 -
ビット番号
1:8
10:14
15
16
17:23
25
内容
BDS コード
予約領域
予約領域 2(#)
ACAS 稼動状況
モード S サブネットバージョン
モード S 固有サービス能力
(BDS40/50/60 を含む)
33
便名情報能力
35
SIC(監視識別コード)能力
#:予約領域2は,規定にて用途が定められる予定。
13
BDS40 が有効である場合,すなわち BDS17 内の BDS40
(4) BDS20 の試験項目
BDS20 は , 航 空 機 識 別 情 報 レ ジ ス タ ( Aircraft
有効データフラグが’1’の場合は,BDS40 内の少なくとも
Identification)と称され,8文字の便名が記録されている。
1つのパラメータが有効である [12-A.2.2.1]。無効デー
便名情報文字の規約は,文献[9]の 3.1.2.9 項に規定されて
タ 領 域 お よ び 予 約 領 域 は ’0’ に 設 定 さ れ る [12-D2.2]
いる。
[19-2.2.25.5]。
BDS20 のフォーマットを,別表 5に示す。
BDS40 に対する試験として,以下の項目を実施する。
BDS20 に対する試験として,以下の項目を実施する。
<TM28>
データ有効フラグの確認
(分類:iv)
<TM29>
予約領域 = 0
(分類:v)
<TM30>
無効データ領域 = 0
(分類:v)
<TM23>
BDS コード = 0x20
(分類:i)
<TM24>
各文字コード = 便名文字規約のコード
各試験内容の詳細を別表 12に示す。
(分類:ii)
<TM25>
便名文字以降の文字はスペース埋め
別表 7. BDS40 フォーマット
(分類:ii)
各試験内容の詳細を別表 11に示す。
(5) BDS30 の試験項目
BDS30 は,ACAS 回避アドバイザリレジスタ(ACAS
active resolution advisory)と称され,ACAS 回避アドバイ
ザリ(RA)が発生した際,当該情報が記録される。
BDS30 のフォーマットのうち,主に試験に関連する部
分を,別表 6に示す。
BDS30 に対する試験として,以下の項目を実施する。
<TM27>
BDS コード = 0x30
(分類:i)
ビット番号
1
2:13
14
15:26
27
28:39
40:47
48
49:51
52:53
54
55:56
内容
MCP/FCU 選択高度
MCP/FCU 選択高度
FMS 選択高度
FMS 選択高度
設定気圧
設定気圧
予約領域
MCP/FCU モードビット
MCP/FCU モードビット
予約領域
目標高度情報源
目標高度情報源
有効フラグ
データ領域
有効フラグ
データ領域
有効フラグ
データ領域
有効フラグ
データ領域
有効フラグ
データ領域
各試験内容の詳細を別表 11に示す。
別表 8. BDS50 フォーマット
ビット番号
1
2:11
12
13:23
24
25:34
35
36:45
46
47:56
(6) BDS40 の試験項目
BDS40 は,選択高度意図レジスタ(Selected vertical
intention)と称され,機上で設定された選択高度に関連
する情報(パラメータ)が記録されている。
BDS40 のフォーマットを,別表 7に示す。パラメータ
毎に,有効フラグビットとデータ領域から構成される。
別表 5. BDS20 フォーマット
ビット番号
1:8
9:14
15:20
21:26
27:32
33:38
39:44
45:50
51:56
内容
14
有効フラグ
データ領域
有効フラグ
データ領域
有効フラグ
データ領域
有効フラグ
データ領域
有効フラグ
データ領域
BDS コード
別表 9. BDS60 フォーマット
ビット番号
1
2:12
13
14:23
24
25:34
35
36:45
46
47:56
便名文字1
~
便名文字8
(6 ビット文字コード)
別表 6. BDS30 フォーマット(抜粋)
ビット番号
1:8
9:22
内容
ロール角
ロール角
トラック角
トラック角
対地速度
対地速度
トラック角変化率
トラック角変化率
真対気速度
真対気速度
内容
BDS コード
RA
- 13 -
内容
磁方位
磁方位
指示対気速度
指示対気速度
マッハ数
マッハ数
気圧高度変化率
気圧高度変化率
垂直慣性速度
垂直慣性速度
有効フラグ
データ領域
有効フラグ
データ領域
有効フラグ
データ領域
有効フラグ
データ領域
有効フラグ
データ領域
電子研報告 No. 131 2014
(8) BDS60 の試験項目
(7) BDS50 の試験項目
BDS50 は,トラック・転回通報レジスタ(Track and turn
BDS60 は,針路・速度通報レジスタ(Heading and speed
report)と称され,機上で計測されたロール角,真トラッ
report)と称され,機上で計測された磁方位,指示対気速
ク角,対地速度,トラック角変化率,および真対気速度
度(IAS; Indicated Airspeed),マッハ数,気圧高度変化
の値が記録されている。
率,および垂直慣性速度の情報(パラメータ)が記録さ
BDS50 のフォーマットを,別表 8に示す。パラメータ
れている。
毎に,有効フラグビットとデータ領域から構成される。
BDS60 のフォーマットを,別表 9に示す。パラメータ
BDS50 が有効である場合,すなわち BDS17 内の BDS50
毎に,有効フラグビットとデータ領域から構成される。
有効データフラグが’1’の場合は,BDS50 内の少なくとも
BDS60 が有効である場合,すなわち BDS17 内の BDS60
1つのパラメータが有効である [12-A.2.2.1]。無効デー
有効データフラグが’1’の場合は,BDS60 内の少なくとも
タ領域は’0’に設定される[12-D2.2][19-2.2.25.6]。
1つのパラメータが有効である [12-A.2.2.1]。無効デー
BDS50 に対する試験として,以下の項目を実施する。
タ領域は’0’に設定される[12-D2.2][19-2.2.25.8]。
<TM31>
データ有効フラグの確認
(分類:iv)
BDS60 に対する試験として,以下の項目を実施する。
<TM32>
無効データ領域 = 0
(分類:v)
<TM38>
データ有効フラグの確認
(分類:iv)
<TM39>
無効データ領域 = 0
(分類:v)
各試験内容の詳細を別表 12に示す。
各試験内容の詳細を別表 12に示す。
別表 10. BDS18/19/17/10(機上装置構成・サービス能力情報関連レジスタ)試験内容
対象
BDS
18
19
17
10
試験
番号
TM02
TM03
TM04
TM05
TM06
TM07
TM08
TM09
TM10
TM11
TM12
TM13
試験内容
BDS10 実装済み
BDS17 実装済み
BDS20 実装済み
BDS30 実装済み
BDS40 実装済み
BDS50 実装済み
BDS60 実装済み
BDS20 データ有効
BDS40 データ有効
BDS50 データ有効
BDS60 データ有効
BDS コード=0x10
TM14
モード S サブネットバージョン
=3,4
TM15
モード S 固有サービス能力フラグ
=有効
TM16
便名情報能力=有効
TM17
SIC 能力=有効
ENRI Papers No. 131 2014
内容
分類
EHS 対応機では,BDS10/17/18/19/20/30/40/50/60 は有
効であるため,対応する BDS レジスタの実装状態を
示すフラグビットは'1'に設定されている。
iii
EHS 対応機では,BDS20/40/50/60 は有効であるため,
対応する BDS レジスタに有効データが存在すること
を示すフラグビットは'1'に設定されている。
iii
i
ELS に対応しているトランスポンダは,バージョン 3 以降。
試験対象データ収集時点では,バージョン 3 および 4 が
存在する。
モード S 特有サービス能力フラグは,BDS02,03,04,10,17
~1C,20,30 以外の GICB サービスが利用可能であること
を示す。
EHS 対応の場合,BDS40/50/60 が対応しているため,能
力有り('1')となる。
ELS に対応している航空機は,便名情報が利用可能で
ある。
SIC(監視識別コード)は全トランスポンダで利用可能で
ある。
- 14 -
ii
iii
iii
iii
15
別表 11. BDS20/30 レジスタ試験内容
対象
BDS
20
試験
番号
TM23
TM24
BDS コード=0x20
文字コード
=便名文字規約コード
スペース埋め
TM25
30
TM27
内容
分類
試験内容
BDS コード=0x30
i
各文字は,アルファベット('1'~'26'),数字('48'
~'57'),またはスペース('32')である。[9-3.1.2.9]
便名の文字以降の文字は,スペースである必要があ
る。また,便名の途中にスペースは含まない。
[9-3.1.2.9]
ii
ii
i
別表 12. BDS40/50/60(主要動態情報レジスタ)試験内容
対象
BDS
試験
番号
1個以上のフラグが有効
40
TM28
TM29
予約領域='0'
無効データ領域='0'
TM30
1個以上のフラグが有効
50
TM31
無効データ領域='0'
TM32
1個以上のフラグが有効
60
TM38
無効データ領域='0'
TM39
16
内容
分類
試験内容
BDS40 が有効である場合は,BDS40 内の少なくとも
1個のパラメータが有効である必要がある
[12-A.2.2.1]ため,データ有効フラグが1個以上有効
設定(='1')されている。
ビット番号 47 から 52,および 52 から 53 までの予約
領域は,’0’値である。[19-2.2.25.5.2.5]
各パラメータに関して,無効なデータ領域(データ
有効フラグ='0'で示されるデータ領域)は'0'値である。
[12-D2.2] [19- 2.2.25.5.2]
BDS50 が有効である場合は,BDS50 内の少なくとも
1つのパラメータが有効である必要がある
[12-A.2.2.1]ため,データ有効フラグが1個以上有効
設定(=’1’)されている。
各パラメータに関して,無効なデータ領域(データ
有効フラグ='0'で示されるデータ領域)は'0'値である。
[12-D2.2][19-2.2.25.6.2]
BDS60 が有効である場合は,BDS60 内の少なくとも
1つのパラメータが有効である必要がある
[12-A.2.2.1]ため,データ有効フラグが1個以上有効
設定(='1')されている。
各パラメータに関して,無効なデータ領域(データ
有効フラグ='0'で示されるデータ領域)は'0'値である。
[12-D2.2][19-2.2.25.8.2]
- 15 -
iv
v
v
iv
v
iv
v
電子研報告 No. 131 2014
独立行政法人電子航法研究所報告編集委員会
委員長:藤井 直樹
委 員:福島 幸子
齊藤 真二
北折 潤
事務局:企画課
電子航法研究所報告の編集は、編集委員会が行う。
編集委員会は2名の査読委員の意見に基づいて論文の採録
の可否を判定する。
本誌に掲載された論文は編集委員会で採録と決定されたも
のであり、主著または共著となっている編集委員は採録の決
定には参加していない。
本誌に掲載された論文の著作権は独立行政法人電子航法研究所
(以下、「研究所」という)に帰属する。本誌に掲載された論文
を引用する場合は、出所を明示すれば研究所の許諾を必要としな
い。本誌に掲載された論文の全部又は一部を複製、転載、翻訳、
あるいはその他に利用する場合は、個人が研究、学習、教育に使
用する場合を除き、研究所の許諾を得なければならない。
ELECTRONIC NAVIGATION RESEARCH INSTITUTE PAPERS
No.131
February
2014
電子航法研究所報告 ISSN 1341-9102
(第131号)
平成26年2月12日 発行
編集兼発行人 独立行政法人 電子航法研究所
発 行 所 独立行政法人 電子航法研究所
〒 182-0012 東京都調布市深大寺東町7丁目42番地23
電 話 0422-41-3168
ホームページアドレス http://www.enri.go.jp/
Electronic Navigation Research Institute. Independent Administrative Institution
7-42-23. Jindaijihigasi-machi, Chofu, Tokyo, 182-0012 , Japan
○本冊子は、グリーン購入法(国等による環境物品等の調達の推進等に関する法律)に基づく
○リサイクル適正の表示:紙へリサイクル可
本冊子はグリーン購入法に基づく基本方針における「印刷」に係る判断の基準に従い、印刷
用の紙へのリサイクルに適した材料[Aランク]のみを用いて作製しています。
No.131 2014. 2
No.131 February 2014
静的情報試験を用いた
ダウンリンク航空機動態情報有効性評価 ………………………… 1
DAPs (Downlink Aircraft Parameters)
Validation using Static Value Test Methodology ………… 1
松永 圭左,瀬之口 敦,古賀 禎
Keisuke MATSUNAGA,Atsushi SENOGUCHI,Tadashi KOGA
第 一 三 一 号
© Copyright 2026 Paperzz