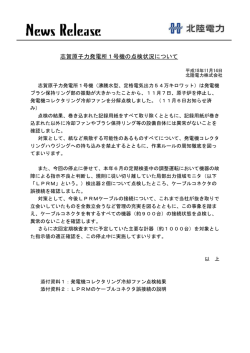
ヒューマノイドロボット PINO *第 1 回 はじめに・モータ制御の基礎* 数年前までは研究者だけのものであったヒューマノイドロボットであるが、近年ROBO-ONE これがモータの基本的な動作原理であ の成功もあり多くの一般の方による製作が増えてきた。その理由として最も大きいのは安価で高 るが、このままだと図1 (c)に示す位置で 性能なマイコンやモータの登場であろう。しかしながら、部品の充実に反して特にヒューマノイ コイルが止まってしまう。ここで、この位 ドロボット作成に関する初心者向けの書籍は乏しく、未だ企業技術者以外の一般の方がロボッ 置に来てコイルが止まる直前に電流を切 トを設計・作成することは難しいのが現状である。現在ロボットを作成している人でも、自分の り替えれば(図1(d) )今度は反対の方向 専門以外に関してはブラックボックスで扱っている方も多いのではなかろうか。より自由な発想 にコイルが引っ張られるのでさらに回転が でロボットを設計できるようになるためには基礎を学ぶことが重要である。 できる。この切り替えを繰り返せばコイル 本連載は、ヒューマノイドロボット設計に必要な技術を基礎から解説し、初心者がつまづきが ちなハードルを1 つ1 つクリアしていくことを目的としている。本連載を最終回まで通読すれば ヒューマノイドロボットを設計できる知識を身につけられるはずである。初回の今回はロボット設 計において避けて通ることができない、ロボットの筋肉とも言うべきモータの基礎を勉強しよう。 を永久に回すことができそうである。この、 電流を切り替える部品を「ブラシ」と言 い、ブラシを用いて電流を切り替えるモー タのことを「ブラシ付モータ」または単に 「DCモータ」と呼ぶ。ブラシの動作原理を の法則により磁石が作った磁場とコイルの モータのしくみ 図2に示しておく。 間に力を発生する。磁石とコイルを図1の 図2に示した構造では、モータが1回転 モータはご存知の方も多いと思うが、磁 ように配置し、中心の軸周りに回転できる する間に、止まってしまうと動けなくなる 石とコイルでできている。電流をコイルに ようにしておくと磁場から受ける力に引っ 点が2点あるので安定して回転を続けるこ 流すと中学校で勉強するフレミング左手 張られてコイルが回転する(図1(a)∼(c) ) 。 とは難しそうであるが、市販のモータでは コイルの形状や磁石の配置を工夫するこ T F とで安定して回転できるようにしている。 動作原理は同じである。 S N N S ブラシ付モータのほかに、磁石を回るほ B うに取り付けて、周囲に配置したコイルに 電流を流す「ブラシレスモータ」や「誘導 F i l N (a) (b) r S N (d) 図1 52 S (c) モータの構造と動作原理 ROBOCON Magazine 2003.4 ここが回る 図2 ブラシ(固定) ブラシの原理
© Copyright 2026 Paperzz