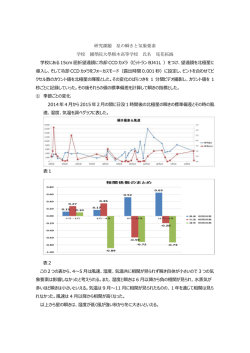
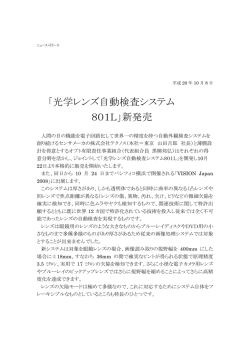
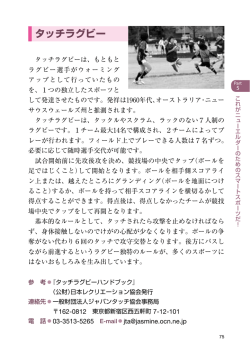
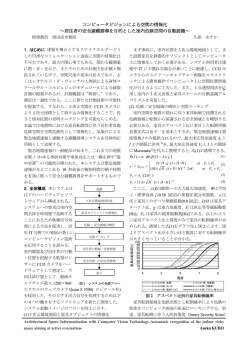
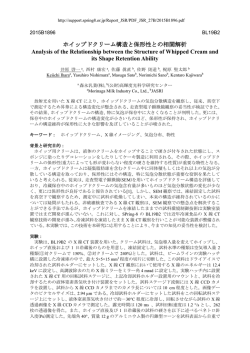
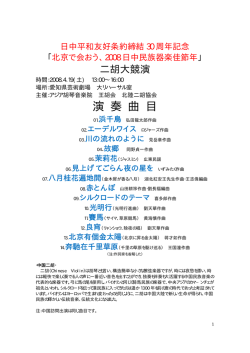
第11回衛星設計コンテスト ミッション概要説明書 事務局使用欄 受付番号 2003 年 1. 応募区分 ■設計の部 月 日 □アイデアの部 2. 作品情報・応募者情報 作品名(漢字・かな・英数字合計20文字以内) 赤外線位置天文観測衛星 作品名 あさがお (ASAGAO) 副題 (作品の特徴を特にアピールしたい場合のみご記入ください。これは公式文書では省略する場合があります) (Astrometry SAtellite for GAlaxy Observation) (フリガナ) 所属学校<大学>等、学部、学科(研究室)、学年 氏名 代表者 ナガヤマ エ 永山 代表者(副)フジマキ 藤巻 メンバ1 メンバ2 メンバ3 メンバ4 メンバ 5 メンバ 6 サ サ リ 枝里 リョウヘイ 遼平 キ 佐々木 フ ミ キ 史記 東京大学工学部航空宇宙工学科(中須賀研究室)学部 4 年 東京大学工学部航空宇宙工学科(町田研究室)学部 4 年 東京大学工学部航空宇宙工学科(中須賀研究室)学部 4 年 野尻 悠太 ユ ウ タ 東京大学工学部航空宇宙工学科(中須賀研究室)学部 4 年 フ ナ ネ ツカサ 東京大学工学部航空宇宙工学科(中須賀研究室)学部 4 年 ノ ジ リ 舟根 司 山本 貴也 タ カ ヤ 東京大学工学部航空宇宙工学科(中須賀研究室)学部 4 年 ニシヅカ カナメ 東京大学工学部航空宇宙工学科(町田研究室)学部 4 年 ノリタカ 東京大学工学部航空宇宙工学科(町田研究室)学部 4 年 ヤマモト 西塚 ヤマモト 山本 要 勤隆 メンバ 7 3.目的と意義(目的・重要性・技術的意義等) 目的: 赤外線位置天文観測衛星「あさがお」は、近赤外線波長(z-band:0.9μm を採用)での高精度位置 天文観測をメインミッションとする静止軌道衛星である。天球上の星の位置、距離、固有運動を観 測によって知ることができると、銀河系(天の川銀河)の構造や形成史が解明できる。世界最初の 位置天文観測衛星である HIPPARCOS の観測データの測距精度は、300 光年ほど離れた所までである。 しかしこれは銀河系において、地球のごく近傍にすぎない。本衛星では7等級の星の位置を HIPPARCOS の約 2 倍の精度で求められる。HIPPARCOS のデータはスタートラッカーのマップのもと となっており、宇宙機の高精度センサとして重宝されているが、本衛星の観測によりスターマップ の精度があがれば、超高精度姿勢制御が求められている現在の宇宙機にとって非常に有意義であ る。また、次世代大型位置天文観測衛星の技術的試金石にも十分なりうる。 重要性・技術的意義等: 上述のような高精度位置天文観測には、星像中心を高精度で決定する必要があるため、衛星の高精 高精度姿勢制御、高精度熱設計、固有振動数管理が重要である。本衛星は micro-sat で達成できる 精度を限界まで高めることを目標にする。そして大型衛星にも劣らない精度が得られれば、 piggy-back の裾野が広げられるであろう。 また、通常の衛星は、恒星カタログをもとに姿勢決定を行うが、本衛星はその恒星カタログの精 度向上を行うものであり、既存の恒星カタログだけを頼りにできない。そこで、高度な安定性のも と、大角度離れた視野を同時に観測するという位置天文観測衛星 JASMINE 計画の手法を使い、星の 相対距離が短時間では不動であることを用いて、最終的に星の位置と衛星の姿勢の両方をデータ解 析で決めるところにも技術的意義がある。 静止軌道は様々なメリットを持つ優れた軌道であるが、自前でアポジキックを行える中∼大型衛星 だけが静止軌道に投入されてきた。しかし、本衛星のように小型でも高性能な衛星が実現されてく るようになると、小型衛星群を静止軌道に投入するまでを扱うロケットも必然的に開発されてくる と思われる。H-IIA でも再着火の回数を増やすことでこれは対応可能である。また、アポジモータ を持った静止衛星におぶさって静止軌道まで連れていってもらい、そこで分離するという,新しい 概念の「衛星へのピギーバック」方式も有望なアイデアである。 4.ミッション(実験)の方法(必要な場合、図・表の別添も可) (a) 衛星(衛星全体の構成・ミッション機器の形状・質量・機能・運用軌道) 本衛星は天文観測のために約 20 分で一周回スピンし、また約2日で歳差角 3.5°の歳差運動をするが、いず れも低周期であるために三軸制御を行う。軌道は静止軌道とする。 1. 光学部 ミッション部とその支持構造からなる。ミッション部は検出器(CCD)と、光学系からなる。光学系は Korsh 系 3 枚鏡に焦点距離を稼ぐための数枚の鏡を加え、上述の JASMINE の為に新たに開発されたものをさらに鏡 同士の相対関係が変わらないように配慮しつつ、ASAGAO の仕様にあわせた。これを支持部材で一体化する。 2. 遮光板展開構造 光学部に太陽光が入射しないようにし、さらに低温の一定環境に安定化させるために、光学部の反対側に遮 光板を配置する。これは打ち上げ後に展開する。展開は実績もあり軽量で構造が簡単なカーペンターテープ を用いる。形状記憶合金でヒンジを作り、これをシートヒーターで加熱して徐々に展開を進める。 3. 姿勢制御部 ミッションから高精度の姿勢安定が求められるので、バス部のほとんどがセンサとアクチュエータで構成さ れる。センサとして2つのスタートラッカー、1つの 3 軸モノリシックリングレーザージャイロ、1つの太 陽センサを、アクチュエータとして4つ(冗長構成)の磁気軸受ホイールとアンローディング用スラスター を積む。CPU はビット反転などを自己補正できるよう、3冗長系とする。 4. 通信部 通信系は 2 系統搭載して冗長系をなす。データレート要求がさほど厳しくない(8Kbps)が、地球指向はできな いため、アンテナは無指向性のパッチアンテナを2つ搭載し、これを切り替えて常時地球と通信できるよう にする。またアップリンク用にオムニアンテナをやはり2つ搭載する。ハウスキーピングデータだけならば オムニアンテナだけでもまかなえる。 5. 電源部 遮光板の太陽側に太陽電池セルを貼る。準太陽指向衛星であるため、発電にはさほど困らない。ただし日陰 時のためにバッテリーは搭載している。なお太陽電池パネルは、ロケット放出直後に姿勢補足補助センサと して利用する。 光学系の詳細図を付録1・2に、また衛星内部の配置を付録3に載せる。 (b) 地上系を含む実験系 CCD を TDI(drift scan)モードで駆動し、その scan レートと衛星のスピン周期を高精度であわせると、星 像を歪ませることなくゆっくりと十分に photon を蓄えることができる。スピン面に、その放射方向からの光 を受光するように星の検出器を配置しているが、この面を銀河系面(天の川)にあわせて銀河系面サーベイ を行う。検出器には、主鏡の前に設置された2枚のお互いに交差する平面鏡(ビーム混合鏡)により、2方 向からの光が混合されて届くようになっている。これは、星の年周運動を近傍の星との相対運動から求める のではなく、大角度離れた星との相対運動から割り出すことで決定精度を向上させられるためである。この 角度は、星の位置と衛星の姿勢を解く際に解が縮退することがなく、またいつも同じ星との比較を行うこと がないような角度を選ぶことが望ましく、本衛星では JASMINE にならい、99.5 度にしている。この2方向か らの光は地上での解析で容易に分離できる。 また、観測と同時に、連続的に得られる photon 数データを地上に送信する。CCD の視野は狭いので、視野に 多数の星像が入ることはまれである。天球上一周ごとに、視野を 1/4 ずつずらすようにし、データを重ねて いく。この実現のため、衛星は歳差運動をする必要がある。こうして細い円環状のデータが蓄積されていく が、2周分連続にデータが得られると、ほかのデータと独立に地上での解析を行うことができる。2周分得 られなくても観測データが蓄積されると補完できる。z-band に感度をもつ近赤外波長の CCD はすでに開発さ れている。 地上局受信アンテナが7m 級以上であれば、データは受信可能である。衛星は地上局と同じ経度の静止軌道 上にあるとしているので迎角は一定である。関東近縁の、例えば勝浦観測所で受信する場合、定常運用時の アンテナ迎角は 49.3°である。 (c)データ取得を含む実験運用手順 定常運用では、以下のように実験を運用する。 1.ピギーバック衛星として HⅡA ロケットに搭載 2.メイン衛星とともに静止軌道へ投入/静止軌道にてメイン衛星から切り離される 3.機器の動作を確認 4.太陽センサで姿勢を粗捕捉し、-z 面(遮光面)を太陽方向へ向ける 5.シートヒータでカーペンターテープを熱し、遮光板の展開 6.ミッション期間に入るまで一時的に待機 7.ミッション期間に入ったらスタートラッカーで姿勢を精捕捉し観測開始 8.取得したデータは常にダウンリンク 9.地球が視界に入る間は観測を一時中断し、ダウンリンクに専念する 定常運用期間は一年のうち、春分・秋分をはさんでそれぞれ約 60 日である。残りの季節は準太陽 指向して銀河面以外の全天サーベイを行う。 5.得られる成果(重要な手順に箇条書き) ・ 天文学における進展 セファイドなどの距離指標星を含む、銀河系面の星の高精度な位置および固有運動を知ること により、遠くの銀河までの距離やハッブル定数といった宇宙論パラメータの精度向上が可能と なり、宇宙論にも影響を及ぼす。また、銀河系の力学構造や形成史解明に関しての重要な情報 をもたらす。 ・ 次世代位置天文観測衛星(JASMINE など)の技術実証 ・ 同解析手法実証 ・ 小型衛星の静止軌道投入技術実証 ・ スターマップの精度向上に伴う、姿勢制御精度の向上 6.主張したい独創性または効果(理工学的進歩・教育啓蒙的効果等) ・ 小型衛星による、現在の大型天文観測衛星を上回る精度での天文観測をする。 ・ ダストによる吸収の効果の少ない近赤外領域での観測により、可視光よりも多くの銀河系面の 星を観測できる。 ・ 形状記憶合金を用いた展開機構を宇宙実証することで、今後の衛星の展開構造に新たな可能性 を示す。 ・ 現在大型衛星がいくつか計画されている位置天文観測の分野で、小型衛星を用いることにより 世界に先駆けていち早く高精度の結果を得ることができる。また、大型衛星で取り入れようと している、観測手法や技術をいち早く、実際のスペースで実証できることになり、大型衛星へ の試金石となる。 ・ 静止軌道へのピギーバッグの有用性、魅力、可能性を知らしめ、それを一般的な打ち上げ手段とす る。 7.具体的な実現方法(衛星を打上げ、実験を行うことを想定) 製作する範囲並びに費用(購入品は別掲) <製作> 光学系は完全に受注生産を行う。JASMINE 計画と同様の検出器、鏡を用いる。検出器は 200 万円× 4、鏡は混合鏡も含めて 400 万円である。 姿勢制御系では、ホイールのローターを製作し、磁気軸受ユニットにくみこむ。磁気軸受は5倍の サイズのものが市販価格 3000 万円であることを考慮し、自主製作では 4 台で 1000 万円以下で実現 できる。 構体・構造は製作による。 <購入> 一方、全姿勢制御センサのコストは1億5千万円ほどと推定される。ミッションの精度にかかわる ので、現状の高精度(高価格)なものを用いる。 スラスターは小型衛星用に安く開発されたμ波エンジンスラスターが 1000 万円以下で供給され る。 通信系・電源系は安いもので賄える。太陽電池の総コストは 2000 万円ほどである。 以上より、衛星の原価のうち、材料費(製品単価を含む)は2億円弱である。 これには原価のうち、人件費(労務費)と製作においてかかる光熱費などの必要経費は含まれてい ない。このような学生が設計し運用を目指す衛星計画においては、学生自らによる渉外活動を通し て社会から広く協力を仰ぐことがコスト面においても実現に向けた推進力となる。小型衛星業界に おける各企業にとどまらず、多くの会社や工場を訪問しより一層の連携を実現させていくことによ り、これらの費用を抑えて製作する方法を見出すことができる。 8.開発・製造・打上スケジュール 2003 年 10 月より BBM モデル設計・製作開始。同時進行で光学系の開発。 2004 年 10 月より FM の製作を開始。 2005 年 10 月 NASDA の超高速インターネット衛星 WINDS のピギーバック衛星として打ち上げ 参考として NASA の SIM 計画の打ち上げが 2009 年度、ESA の GAIA 計画の打ち上げが 2012 年度であ り、このあさがお計画は世界に先駆けて高精度の観測ミッションを行うこととなる。 9.ミッションの概要(プレスリリース等で使用するので、200 字程度でわかり易く表現してくだ さい。) 「あさがお」は恒星の位置と距離、固有運動を今までより高い精度で観測する赤外線位置天文観測衛星 です。私たちが住む銀河系のディスクを観測対象とし、銀河系の構造やその形成史を明らかにしていき ます。得られた観測データにより更新されたスターマップは、天文学や今後の人工衛星の姿勢制御など に幅広く利用されます。現在世界中で位置天文観測衛星の計画が進められていますが、「あさがお」は その先駆けとなります。 図1:鏡の配置と光路図 【 光の流れ: ビーム混合鏡(上・下)→主鏡→副鏡→鏡①→鏡②→鏡③→鏡④→鏡⑤→CCD 】 図2:光学系全体図(蓋は本来開かない。) 図3:衛星概観
© Copyright 2026 Paperzz