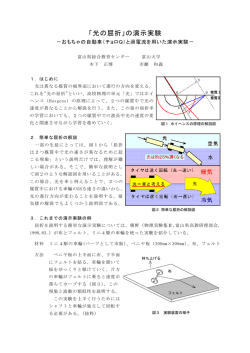
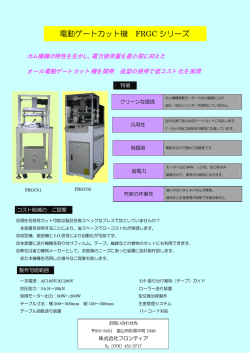
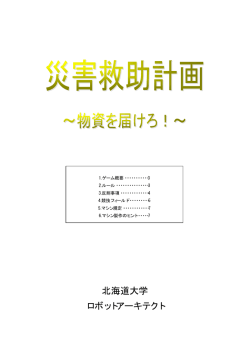
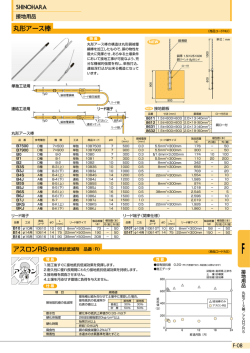
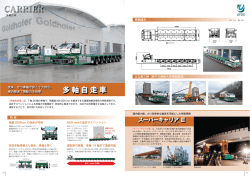
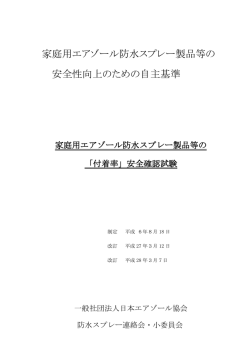
WRO Japan2005 競技ルール 2.0 版(変更日付 05/09/13) 修正箇所は にて、変更・追加は赤字にて記載してあります。 【共通ルール】 競技の定義: WRO Japanは市販ロボットキットを使った自律型ロボットによる競技である。 参加競技の定義: 1)参加必須競技−表彰、審査の対象となる 小学生チーム:トラック8(ライントレース)とタッグオブウォー(綱引き)に参加すること。 中学生チーム:スマートボール(球技:初級)に参加すること。 高校生チーム:スマートボール(球技:上級)に参加すること。 小学生チーム 中学生チーム 高校生チーム トラック8(ライントレース) ◎ × × タッグオブウォー(綱引き) ○ × × スマートボール(球技:初級) × ◎ × × × ◎ スマートボール(球技:上級) ◎:参加必須(表彰、審査の対象) ※ ○:参加必須(世界大会審査の対象外) ×:競技なし 大会当日は、参加選手(コーチを除く)以外はピット(控え室及びロボット調整場所)と競技エリアへの 入場は出来ませんので御注意下さい。 基準の定義: 競技ルールにのっとった競技とする。車検、競技を含めて、審判の判断は絶対であり、それに従うこと。 1.ロボットはWRO-J実行委員会が定める市販ロボットキットを活用する。 WRO Japan2005 大会 においては、以下を定める 1)主要部品・規格等(搭載コンピュータ、センサ、モータ)については以下を使用限度とする。 搭載コンピュータ:RCX1台 光センサ:2個以内 タッチセンサ:2個以内 モータ:3個以内 搭載コンピュータ:1台(1 チップ) 光センサ:2個以内 タッチセンサ:2個以内 モータ(定格9V 以下) :3個以内 2)ロボットの電源・電圧は定格9V 以内とする。 3)例外部品規定1 上記以外の部品について、以下のものを認める。ただし、ロボットの性能に影響を与えるものは認めない。 A.チーム名等を表現することを目的として、ロボットに旗などを立てる。 B.チーム名等を表現することを目的として、ロボットにシールなどを貼る、または文字を書く、色を塗る。 C.操縦者を模したミニフィグ等を載せる。 4)例外部品規定 光センサの計測精度の向上を目的として光センサを覆ってもよい。(これをスカートと呼ぶ) 競技会場の照明は一般的な蛍光灯であり、競技場内の箇所によって明るさは微妙に違う。 実行委員会からはスカートを装着することを推奨する。 スカートは光センサの計測精度向上を目的としたものに限り、ロボットの動力性能に影響を与えてはいけない。 使用できる材質は指定のロボットキット内部品および紙を使用するものとする。スカートの形状は規定しない。 しかしコースには数 mm の程度の段差が存在するので、それを考慮に入れて作成する必要がある。 コースを破壊するおそれのあるスカートは車検時の装着を禁じることがある。 (スカートの例) 5)改造、接着について 市販ロボットキットの部品を改造してはいけない。 ロボットを構成する部品を接着剤等を使用して接着してもよい。ただし、接着剤は部品の接着のみを目的とし、 おもりになったりレンズになったり等、接着剤に部品接着以外の機能を持たせてはいけない。 2.スタート時のロボットの大きさは、 トラック8(ライントレース)は 300mm×200mm×300mm(長さ×幅×高さ)以内 タッグオブウォー(綱引き) は 300mm×300mm×300mm(長さ×幅×高さ)以内 スマートボール(球技:初級)は 300mm×280mm×300mm(長さ×幅×高さ)以内 スマートボール(球技:上級)は 300mm×280mm×300mm(長さ×幅×高さ)以内 ※ スタート後は、変形しても良い。 3.ロボットは、故意にコースに損傷を与えてはいけない。同時に走行する他のロボットの邪魔をしてはいけない。 4.ロボットはプログラム実装により制御される自律型とし、スタートしてからゴールまたはリタイヤするまで、 ロボット本体以外からはいかなる物理的な方法によってもエネルギー、力、情報などを与えてはいけない。 5.ロボットの動力源となるバッテリーは、競技当日実行委員会から提供される乾電池のみ使用する。 6.実装するプログラムは、WROJ実行委員会が定めるソフトウェアによりプログラム作成されたものであること。 WRO Japan2005 大会 においては、以下を定める RCX-Code , ROBOLAB 7.スタート スタートは、RCX の Run ボタン押下することとする。 審判長の合図によりスタートする。 スタートの合図は以下とする。 1)「スタート位置についてください」または「Go to the start(ゴー トゥー ザ スタート)」 →ロボットをスタート地点に置く。 2)「用意」または「Ready(レディ)」 3)「ピー」(笛を鳴らす) → RCX の Run ボタン押下。 8.リタイヤ 審判がリタイヤと認めた場合、競技者はすみやかに競技コースからロボットを撤収する。 リタイヤとする場合: 1)制限時間内にゴールできない場合。制限時間は競技当日審判より競技前に通知される。 2)競技ルールに違反していると審判が認めた場合。 3)ロボットが走行不能状態であると審判が認めた場合。 4)その他、審判が状況に応じて競技を中止すべきと判断した場合。 9.やり直し 不慮の事態により競技者に不利な状況が発生した場合等は、審判は競技のやり直しを命じる。 競技1)トラック 8(ライントレース) 8 の字ラインに沿って速く走るロボット 競技内容:スタートからゴールまで競技ライントをトレースし、できるだけ速く走行すること。 競技内容:スタートからゴールまで競技ラインをトレースし、できるだけ速く走行すること。 ※この競技をWRO2005 バンコク大会への選考基準とする。 【競技共通ルール】 1.競技は2つの競技台でロボット2台(2チーム)が同時に走行する。 2.ロボットは競技ラインをはずれてはいけない。はずれた場合、リタイヤとする。 競技ラインをはずれるとは、ロボットの接地部分(タイヤ等)を含んで、その間全てが競技ラインから はずれた場合とする。 (例) OK OK リタイヤ 接地部分の間が競技ラインを 接地部分が競技ライン上に 接地部分および接地部分の間の またいでいる ある 全てが競技ラインからはずれて いる 3.競技ラインの幅は 20∼25mm。 4.競技ラインに存在するチェックポイントをロボットの接地部分(タイヤ等)および 接地部分の間が、必ず通過すること。通過しない場合には,リタイヤとなる。 5.競技は各チーム2回行われる。 6.着順の判定 リタイヤした場合は、着順なしとする。 リタイヤした場合は、スタートラインからリタイヤした場所までの距離を参考表示する。 2回競技したうち、時間の小さいほうが採用される。 7.自動計測装置の取り付け(トラック 8:ライントレース のみ) 参加のロボットには、規定の自動計測装置を取り付ける。 自動計測装置は、実行委員会が準備し、競技開始前にロボットに取り付ける。 参加ロボットは、あらかじめ自動計測装置を取り付ける機構を用意しておくこと。 <自動計測装置> 2×8ポッチのプレートに、磁石(板状)を貼り付けたもの。 (形状) 2×8ポッチ プレート 6.5mm×1.5mm×5mm 磁石 10mm×10mm×2mm (取り付け方法) プレート磁石がコース面に向くようにし、ロボットにプレートをはめ込む。 磁石とコース面の間は、1mm以上、8mm以下となるようにすること。 (取り付け例) 1mm以上 8mm 以内 8.走行時間計測 走行時間は自動計測装置による自動計測と、同時に計測員によるストップウォッチを使用した手動計測を行う。 自動計測の結果を優先する。なんらかの理由で自動計測できなかった場合には、手動計測の結果を有効とする。 ※:自動計測システムは別紙参照 9.スタートとゴール 1)スタート ロボットに取り付けられた自動計測装置の先端がスタートラインを超えない位置からスタートする。 2)ゴール ロボットに取り付けられた自動計測装置がゴールライン*1 を通過した時点をゴールしたとする。 10.コースの材質 コース面は丈夫な紙製。競技ラインはコースの紙に印刷してある。 コース面は丈夫な布製。競技ラインはコースの布地に印刷してある。 【競技部門別ルール】 競技内容:スタートからゴールまで、競技ラインをトレースし走行する。 11.制限時間 スタートから120秒以内にゴールすること。120秒にて競技は打ち切られる。 トラック 8:ライントレース 競技コース (Possible) START/FINISH Line Intersection Turn Radius Not Less Than 150 mm. ロボット進行方向 90 degree turn NOT EXCEED 1,500 mm. x 1,500 mm. 競技2)タッグオブウォー(綱引き) 力と技が融合したロボット 競技内容:2 台のロボットが黒線を進みながらロープを引っ張り合うこと。 ※この競技はWRO2005 バンコク大会の選考基準とはしない。 【競技共通ルール】 1.競技はひとつの競技台で、ロボット2台(2チーム)が対戦する。 2.競技フィールドの大きさは 1,500m×1,500m 以内とする。 2.競技フィールドの大きさは 1,500mm 長さ×750mm 幅以内とする。 3.競技フィールドは以下の 4 点で構成させる事 ア)1500mm の直線のトラックラインつまり黒線を1本。 イ)380mm のひも(紐)を各ロボットの後方部分に固定する。 ウ)ロープの両端には青い印を付けておく。 エ)ロープの中心に目印を付けておく。 4.ロボットはロープを引っ掛ける為の場所を確保して置く事。(※フックの大きさや形状は未定) 5.競技はロープの中心印が黒い線の中央にある状態で開始される。 6.審判が競技開始の合図を出したと同時にロボットがトラックラインを進みながらロープを引っ張り合う。 7.ロボットがミストラックした場合は直ちに失格とする。 7.ロボットはトラックラインをはずれてはいけない。はずれた場合、リタイヤとする。 トラックラインをはずれるとは、ロボットの接地部分(タイヤ等)を含んで、その間全てが競技ラインから はずれた場合とする。 8.競技時間は 120 秒とする。対戦相手のロープ青印を中央線に多く引っ張った方を勝ちとする。 9.競技時間内に勝敗が決まらない場合、ロボットの総重量が軽い方を勝ちとする。 10.トラックラインの幅は 20∼25mm。 タッグオブウォー:綱引き 競技コース 競技3)スマートボール(球技:初級) 時間とボールポイントを競う球技用ロボット 競技内容:1台のロボットが多くのボールを如何に早くゴールエリアへ得点できるかを競い合うこと。 ※この競技はWRO2005 バンコク大会の選考基準とする。 【競技共通ルール】 1.競技はひとつの競技台で、ロボット1台(1チームのみ)が競技する。 2.競技フィールドの大きさは 936m 幅×1,836m 長さ×100mm 壁の高さとする。 ※900mm×1,800mm の両端に厚さ 18mm の壁を取り付ける。 3.競技フィールドは以下の5点で構成させる事。 ア)競技フィールドには、スタートエリア・青パッチ×2・ボールエリア・ゴールエリア・サービスエリアがある。 イ)ボールエリアとゴールエリアには、160mm×160mm の凹凸段差(5mm 以内)の有るフレームがある。 イ)ボールエリアとサービスエリアには、160mm×160mm(外寸)の凹凸段差(高さ 5mm×幅 8mm)のフレームが 固定されてある。 ウ)青パッチの大きさは 100mm×100mm とする。 (塩化ビニール製のシールを予定) エ)ゴールエリアには黒線(20∼25mm 以内)がある。 オ)壁の厚みは 18mm である。 4.ボール(ピンポン玉)は、フレーム内にピラミッド状に固定される。(橙玉×29 個+白玉 1 個) 5.設置するピンポン球は、1 段目 16 個、以後 4 段に積み上げ、合計 30 個とする。(予定) 5.設置するピンポン玉は、1 段目 16 個、以後 4 段に積み上げ、合計 30 個とする。(予定) 6.ボール(ピンポン玉)ピラミッド最上段に白球を設置する。 7.ゴールエリア内にサービスポイントエリア(ボール得点×2)を設置する。 7.ゴールエリア内にサービスエリア(ボール得点×2)を設置する。 8.得点は、タイム得点とピンポン玉得点の 2 つの合計とする。 タイム得点=(180 秒−到達タイム) ピンポン玉得点=(サービスエリアピンポン玉数×2)+その他のゴールしたピンポン玉 ※ ゴールエリアもしくは,サービスエリアに接地しているピンポン玉をゴールしたとみなし,得点の対象とする。 (ゴールラインに接地しているピンポン玉はゴールとみなす。) ※ 但し、白球をゴールした場合は,ピンポン玉総得点を更に 2 倍とする。 ※ 但し、タイム得点は 1 秒=1 ポイント ピンポン玉得点は 1 個=2 ポイントと換算する。 9.同点の場合は、タイムが早かった方を優先する、次に白玉、その次に、玉数とする。 10.競技は各チーム 2 回行われる。 11.走行時間計測は、計測員によるストップウォッチを使用した手動計測を行う。 12.コースの材質 コース面および壁は、アクリル板。コース面は壁と同様の白色。(予定) コース面および壁は、木製。コース面は壁と同様の白色。 ゴールエリアの黒線および着色されたエリアは、塩化ビニール製のシール状のものが貼ってある。(予定) 13.ゴールエリアの黒線をゴールラインとし、ロボット本体の接地部分がゴールラインを最初に通過(ゴールラインの 一部に接触した時点)した時点を到達タイムとする。 14.制限時間以内でも参加チームの選手が挙手(右でも左でも可)をすれば競技審判の判断により、競技を終了する ことが出来る。 スマートボール:球技(初級) 競技コース ボールエリア・サービスエリアのフレームとボール設置例 コースイメージ図 【競技部門別ルール】 制限時間:スタートから180.0秒以内にゴールすること。 180.0秒にて競技は打ち切られる。 競技4)スマートボール(球技:上級) 時間とボールポイントを競う球技用ロボット 競技内容:1台のロボットが多くのボールを如何に早くゴールエリアへ得点できるかを競い合うこと。 ※ この競技はWRO2005 バンコク大会の選考基準とする。 【競技部門別ルール】 ・ スマートボール(球技:上級)は先の初級競技内容に準拠した内容で行う。 ・ 大会当日に複数の追加課題を発表する。 ・ 追加課題に対応したロボット及びプログラム作成時間(3 時間予定)を経て競技を行う。 各競技共通)車検 公平な競技環境とするため、競技開始前に参加チームのロボットを検査する。 車検は審判により行われる。車検にて審判よりロボットおよびソフトウェア等の変更を指示された時は、これに 従わなければならない。車検に合格したロボットだけが競技に参加できる。 1.オフィシャルバッテリーの配布 受付時に、オフィシャルバッテリー(日立マクセル アルカリ単三型乾電池)を配布する。 小学生チーム、中学生チーム、高校生チームそれぞれ12本。 2.車検の手続き 1)車検開始時間に、参加チームは車検の準備をし、車検場所にいなければならない。 車検時間、車検場所は、競技の前日までにおよび競技当日朝、実行委員会より参加チームに通知される。 車検時には、受付で配布されたオフィシャルバッテリーを装填済みであること。 2)車検対象 以下を検査の対象とする。 A.ロボット B.プログラム C.バッテリー 3)車検内容 A.ロボット 競技ルールに適合したロボットであること。 B.プログラム 参加チームは以下のいずれかの記憶媒体によりプログラムを持参する。 パーソナルコンピュータ、フロッピーディスク、メモリスティック(USB 接続) 参加チームは、審判が把握できるように、車検場にてプログラムをロボットにダウンロードする。 審判は競技ルールに適合したソフトウェアによるプログラムが作成されていることを確認する。 C.バッテリー 車検にて RCX の蓋を開け、オフィシャルバッテリーが装填されていることを確認する。 確認後、ロボットのバッテリー装着部分に封印シールを貼る。 ※注:車検時に、バッテリーを確認できる構造とすること。 オフィシャルバッテリーを充電してはならない。 オフィシャルバッテリーにはいかなる物理的なエネルギーも外部から与えてはならない。 D.車検後のテスト走行 車検後、一定時間内のテスト走行を認める。 車検による不具合が発生したと審判が認める場合には、再度の車検を認める。 4)車検の手順 集合 → ロボット検査 → バッテリー確認、封印 → プログラムダウンロード → テスト走行 5)テスト走行後 参加チームは、テスト走行後、運営委員より指定された場所にとどまり、競技開始を待つこと。
© Copyright 2026 Paperzz