第4章
4.1
ステレオ写真測量 stereo photogrammetry
ステレオ写真測量とは
写真測量による計測は、対象物が平面の場合には単写真で計測することができるが、対象物が立体の場合には
その対象物を 2 か所以上から左右の画像が 60%以上の重複度で重なるように撮影して行うステレオ写真測量の
原理を利用する。計測対象物によっては、2 枚一組以上のステレオ画像を用いて三次元計測を行う。
被写体の三次元座標は、写真面より投影中心をとおり実空間で互いに交わった光束の交点を、空間前方交会法
を用いて求めるものである。通常、地図作成(1/500~1/25,000)は、ステレオ写真測量法が用いられている。ス
テレオ写真は、撮影方法に制約があり、第 5 章(5.1 フィルム航空カメラ、5.2DMC 航空カメラ、5.3 近接一眼レ
フ平行撮影、5.4 近接マルチ回転マッチング)で説明する撮影計画を立てておく必要がある。撮影計画は、測量
目的に見合った良質な写真(画像)を撮影するために行い、精度、効率、及び経済の観点に立って作業を進める
ために必要である。
4.1.1
共面条件とは coplanarity condition
撮影時には撮影した左右の写真の像による光線は空間で交会している。その写真を撮影時と同じ位置に置けば、
左右の光線を再現して空間で交会させれば三次元計測が行える。左右の対光線を交会させる標定を、相互標定と
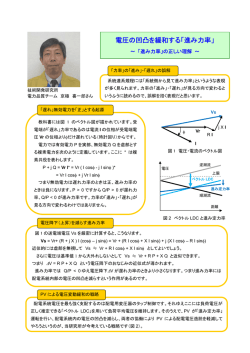
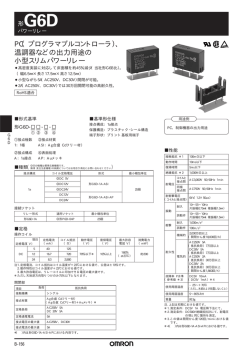
いい、解析写真測量では”共面条件”を用いる。共面条件とは、図 4.1.1.1 に示すように撮影したカメラにおいて、
投影中心 O1、O2、像点 a1、a2 の 4 点が同一平面(図 4.1.1.3 のハッチング面)に存在すれば、必ず光線 O1a1 と
O2a2 は点 A で交わるという条件である。5 組の対光線が交われば、相互標定が完成する。
Z
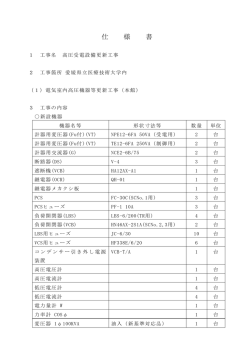
基準点測量
シグナル設置
Y
デジカメ
による撮影
O1
O2
f
1
像点a
像点a2
X
カメラからデータ
の取り込み
基準点の画像
座標の測定
写真座標観測は、
デジタル図化機
画像処理ソフト
PhotoShopによる
内部標定
相互標定
A
ステレオモデル
図 4.1.1.1 ステレオ写真測量の原理
絶対標定
地面
パスポイントから
被写体の3D座標
ヘルマートやアフィン
変換で写真座標に
変換する
複数のモデル
の場合には、接続
標定をする
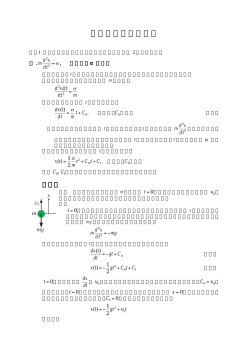
図 4.1.1.2 ステレオ計測の流れ
基準点の絶対座標
を入力
図 4.1.1.3 共面条件
図 4.1.1.4 地上写真ステレオ計測
図 4.1.1.3 に示す地上座標系UVWにおける点O1 , O2 , p1 , p2を含む空間上の平面方程式を構成し、その不定方程
式から次に示す平面の条件が得られる。
Uo1
U
| o2
U1
U2
Vo1
Vo2
V1
V2
Wo1 1
Wo2 1
|=0
W1 1
W2 1
...(4.1.1.1)
この行列式を共面条件式という。ここに,上に示す行列式において第 1,2,3,4 行はそれぞれ点O1 , O2 , p1 , p2 の
UVW 座標値である。(数学的証明:coplanarity.pdf)
4.1.2
相互標定 relative orientation
撮影したステレオ画像による、左右の対光線を空間に投影すると、画像の撮影位置及びカメラの回転角は不明
のためそれらの対光線は交わらない。そのときある投影面において左右の対光線との交点間の食い違いの長さベ
クトルのx、y成分において、それぞれ x 視差(横視差;x-parallax)、y 視差(縦視差;y-parallax)という。相互標定
は、左右のカメラの回転角及び/又は移動量の標定要素を用い、左右のステレオ画像の縦視差を消去して行くこと
である。5 個の対光線を交会させるということは、5 個の標定要素を解けば、ステレオ画像の相互標定が行った
ことになる。このことは解析法における、
共面条件が成立すれば縦視差はなくなることに対応している。図 4.1.1.3
のハッチングの部分を、核理論において核面(epipolar plane)といい、核面と写真面との交線を核線(epipolar line)
になる。空間上の点は左右の画像にある核線上に存在する。
相互標定は、空間立体幾何学で説明できる。相互標定のための未知量である標定要素について次のように定義
する。1 つのカメラにおいて、空間上そのカメラが移動したときの移動量 b を XYZ 座標軸のベクトル成分に分
けて、bx, by, bz の要素にする。次に、カメラが回転(空間での傾斜)したとき、Z 軸周りの回転角κ、Y 軸周り
の回転角φ、及び X 軸周りの回転角ωの成分を表す。したがって、1 つのカメラの未知量は bx を除き以上の 5
個となる。ステレオ画像では左右 2 台のカメラを使用するので、合計 10 個の未知量を持つが、相互標定では左
右の対光線を空間上で交会させるので、その 10 個の標定要素から条件付で 5 個選んで解けばよいことになる。
投影中心を結ぶ相互標定や左側投影中心を固定する相互標定は、いずれもその条件つきの相互標定といえる。
相互標定要素は左右のカメラにおいてカメラの座標軸xyzのまわりの回転角としてそれぞれω, φ, κおよびカメ
ラ投影中心の移動量bx, by, bz(bx=1としてよい)を設定する。左カメラでは添え文字1、右カメラでは添え文字
2とすると、相互標定要素は次のとおり書ける。
回転角 (κ1 , φ1 , ω1 , φ2 , ω2 )
移動量(by1 , bz1 , by2 , bz2 )
相互標定要素の組み合わせは、次の3つのグループから合計 5 個を選定して行う。
①シフトグループ
(κ1 , κ2 , by)から 2 個(byは 2 個選んで解くことができない。by は 1 個のみ)
②スケールグループ(φ1 , φ2 , bz)から 2 個(bzは 2 個選べない。1 個のみ)
③オメガグループ (ω1 , ω2 )から 1 個
以下には、回転の順序を入れ替えた2種類の回転行列(M)の要素を求めておく。なお、各軸まわりの回転角Mi
は次のとおりとする。
cosφ 0 sinφ
1
0
0
cosκ −sinκ 0
1
0 ) , Mω = (0 cosω −sinω) , Mκ = ( sinκ cosκ 0)
Mφ = ( 0
−sinφ 0 cosφ
0 sinω cosω
0
0
1
(M = Mφ Mω Mκ 順: Stereoplanigraph C8 の場合)
...(4.1.2.1)
cosφ ∙ cosκ + sinφ ∙ sinω ∙ sinκ −cosφ ∙ sinκ + sinφ ∙ sinω ∙ cosκ sinφ ∙ cosω
cosω ∙ sinκ
cosω ∙ cosκ
−sinω )
Mφωκ = (
−sinφ ∙ cosκ + cosφ ∙ sinω ∙ sinκ sinφ ∙ sinκ + cosφ ∙ sinω ∙ cosκ cosφ ∙ cosω
(M = Mω Mφ Mκ 順: WildA7,A8 の場合)
cosφ ∙ cosκ
−cosφ ∙ sinκ
sinφ
Mωφκ = (cosω ∙ sinκ + sinω ∙ sinφ ∙ cosκ cosω ∙ cosκ − sinω ∙ sinφ ∙ sinκ −sinω ∙ cosφ)
sinω ∙ sinκ − cosω ∙ sinφ ∙ cosκ sinω ∙ cosκ + cosω ∙ sinφ ∙ sinκ cosω ∙ cosφ
4.1.3
...(4.1.2.2)
...(4.1.2.3)
投影中心を結ぶ相互標定 relative orientation of intersecting projection centers
(M = Mφ Mω Mκの場合)
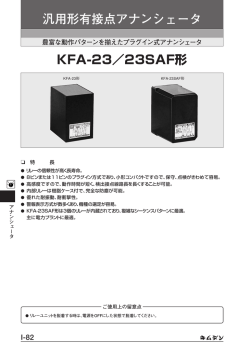
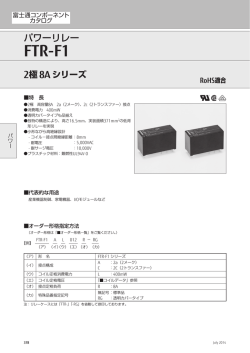
図 4.1.3.1 に示すように投影中心O1 , O2を結んだ軸をX軸とすれば、使用する標定要素はκ1 , κ2 , φ1 , φ2 , ω2 の 5 個
となる(ω2 の代わりにω1 を選んでもよい)
。この場合、共面条件(4.1.1)においてVo1 = Vo2 , Wo1 = Wo2とおけるか
ら、共面条件式は次のように書ける。
Vo1
f = |V1 − Vo1
V2 − Vo1
Wo1
W1 − Wo1
W1 − Wo1
1
Y
0| = | 1
Y2
0
Z1
|=0
Z2
...(4.1.3.1)
ここで、XYZ系は UVW 系に平行であり、UVW系の座標原点を投影中心O1に平行移動させた座標系を表し
ている。
回転行列 M はM=MφMω Mκの場合と仮定してモデル座標系XYZとカメラ座標系(x,y,-c)との関係を表して
おく。
左カメラについては、次のように表すことができる。
X1
x1
( Y1 ) = Mφ1 ∙ Mκ1 ( y1 )
−c
Z1
または
X1 = (cosφ1 ∙ cosκ1 )x1 + (−cosφ1∙ sinκ1 )y1 + (sinφ1 )(−c)
Y1 = (sinκ1 )x1 + (cosκ1 )y1
}
(−sinφ
)x
(sinφ
)y
(cosφ
)(−c)
Z1 =
1 ∙ cosκ1 1 +
1 ∙ sinκ1 1 +
1
右カメラに関しては、次のようになる。
X2
x2
1
( Y2 ) = Mφ2 ∙ Mω2 ∙ Mκ2 ( y2 ) + (0)
−c
Z2
0
または
...(4.1.3.2)
...(4.1.3.3)
...(4.1.3.4)
X2 = (cosφ2 ∙ cosκ2 + sinφ2 ∙ sinω2 ∙ sinκ2 )x2 + (−cosφ2 ∙ sinκ2 + sinφ2 ∙ sinω2 ∙ cosκ2 )y2 + (sinφ2 ∙ cosω2 )(−c) + 1
Y2 = (cosω2 ∙ sinκ2 )x2 + (cosω2 ∙ cosκ2 )y2 + (−sinω2 )(−c)
}
Z2 = (−sinφ2 ∙ cosκ2 + cosφ2 ∙ sinω2 ∙ sinκ2 )x2 + (sinφ2 ∙ sinκ2 + cosφ2 ∙ sinω2 ∙ cosκ2 )y2 + (cosφ2 ∙ cosω2 )(−c)
...(4.1.3.5)
5 個の標定要素を最小 2 乗法により求めるために、
次のように未知量を近似値と補正量とによって表しておく。
κ1 = κ1 + δκ1
φ1 = φ1 + δφ1
κ2 = κ2 + δκ2
φ2 = φ2 + δφ2
ω2 = ω2 + δω2 }
...(4.1.3.6)
したがって、共面条件式(5.5.5)を上に示す 5 つの要素に関して線形化した式は、次の形で表すことができる。
f=|
̃1
Y
̃
Y2
Z̃1
| = a1 ∙ δκ1 + a2 ∙ δφ1 + a3 ∙ δκ2 + a4 ∙ δφ2 + a5 ∙ δω2
Z̃2
...(4.1.3.7)
ここで、
̃1 , Y
̃2 , Z̃1 , Z̃2 :Y1 , Y2 , Z1 , Z2 の近似値、
Y
a i :関数 f の微係数、
mLij : 左カメラの回転行列の要素、
mRij :右カメラの回転行列の要素
である。
そうして、式(4.1.3.7)の微係数を求めると、上の式は次のように得られる。
̃
Y
f=| 1
̃
Y2
+|
y
̃
Y1 tanκ1 − 1
Z̃1
sinκ
1
|+|
Z̃2
̃2
Y
̃
̃
Y1
X2 − 1
| δφ2 + |
0
Z̃1
0
̃
Y1
c
cosω2
̃1 sinφ1
Y
Z̃2
̃2 tanω2
−Y
̃2 cosφ2
Y
X
| δκ1 + | 1
0
̃
0
Y1
| δφ1 + | R
Y2
m22 x2 − mR21 y2
Z̃1
| δκ2
mR32 x2 − mR31 y2
| δω2
Z
Y
O1
O2
f
1
像点a
X
像点a2
A
ステレオモデル
地面
図 4.1.3.1 投影中心を結ぶ相互標定(共面条件)
(M=Mω Mφ Mκ の場合)
左カメラに関して、
X1
x1
( Y1 ) = Mφ1 ∙ Mκ1 ( y1 )
−c
Z1
...(4.1.3.9)
または
X1 = (cosφ1 ∙ cosκ1 )x1 + (−cosφ1 ∙ sinκ1 )y1 + (sinφ1 )(−c)
Y1 = (sinκ1 )x1 + (cosκ1 )y1
} …(4.1.3.10)
Z1 = (−sinφ1 ∙ cosκ1 )x1 + (sinφ1 ∙ sinκ1 )y1 + (cosφ1 )(−c)
右カメラに関して、
X2
x2
1
( Y2 ) = Mω2 ∙ Mφ2 ∙ Mκ2 ( y2 ) + (0)
−c
Z2
0
または
...(4.1.3.11)
X 2 = (cosω2 ∙ cosκ2 )x2 + (−cosφ2 ∙ sinκ2 )y2 + (sinφ2 )(−c) + 1
Y2 = (cosω2 ∙ sinκ2 + sinω2 ∙ sinφ2 ∙ cosκ2 )x2 + (cosω2 ∙ cosκ2 − sinω2 ∙ sinφ2 ∙ sinκ2 )y2 + (−sinω2 ∙ cosφ2 )(−c)}
Z2 = (sinω2 ∙ sinκ2 − cosω2 ∙ sinφ2 ∙ cosκ2 )x2 + (sinω2 cosκ2 + cosω2 ∙ sinφ2 ∙ sinκ2 )y2 + (cosω2 ∙ cosφ2 )(−c)
…(4.1.3.12)
したがって、線形化した共面条件式は次のように表されます。
−y1 + ̃
Y1 cosκ1 ̃
Y1 sinφ1
̃
̃
̃
Y1
Y Z̃1
X1 0
̃2
f=| 1
|+|
δκ
+
|
|
δφ
+
|
|
Z
1
1
̃2
̃2 Z̃2
̃2
Y
Y
0 Y
Z̃1
sinκ1
̃
̃ 2 − 1) |Y1
(X
Z̃1
4.1.4
̃
Y
sinω2
| δφ2 + | 1
−cosω2
Z̃2
mR22 x2 − mR21 y2
| δκ2 +
mR32 x2 − mR31 y2
−Z̃1
| δω2
̃2
Y
…(4.1.3.13)
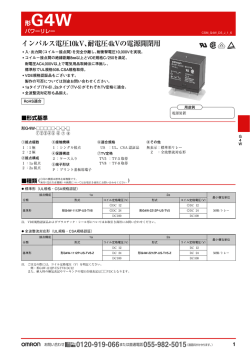
左カメラを固定する相互標定 relative orientation of fixed left-hand projection center
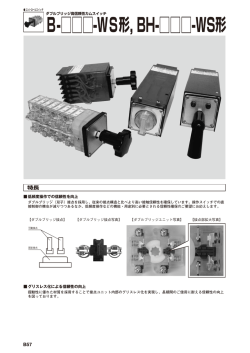
図 4.1.4.1 に示すように左カメラを鉛直に固定し、右カメラの標定要素だけで相互標定する式を導いてみる。
このような標定法を接続法という。
Z
Y
O1
f
像点a2
O1
X
f
1
像点a
A
ステレオモデル
地面
図 4.1.4.1 接続法
式 4.1.1 に示す共面条件において接続法の場合には、次のように整理することができる。
Uo1
U − Uo1
f = | o2
U1 − Uo1
U2 − Uo1
Vo1
Vo2 −Vo1
V1 −Vo1
V2 −Vo1
または
BX
f = | X1
X2
あるいは
BY
Y1
Y2
BZ
Z1 | = 0
Z2
Wo1
1
Wo2 −Wo1 0
|=0
W1 −Wo1 0
W2 −Wo1 0
bx
f = | x1
X2
by
y1
Y2
bz
−c| = 0
Z2
…(4.1.4.1)
ここで、
1, by, bz:実際の基線成分(BX , BY , BZ )に対応する写真基線成分(bx=1とおく)、
x1 , y1 , −c(= −f):左カメラ座標系(左カメラは鉛直に固定するから、XYZ系に一致する)
、
X 2 , Y2 , Z2 :XYZ系に平行な右カメラの座標系
です。
まず、左右のカメラ座標は次のように表すことができる。
(M=Mφ Mω Mκの場合)
X 1 = x1
Y1 = y1 }
Z1 = −c
...(4.1.4.2)
X2 = (cosφ2 ∙ cosκ2 + sinφ2 ∙ sinω2 ∙ sinκ2 )x2 + (−cosφ2 ∙ sinκ2 + sinφ2 ∙ sinω2 ∙ cosκ2 )y2 + (sinφ2 ∙ cosω2 )(−c) + 1
Y2 = (cosω2 ∙ sinκ2 )x2 + (cosω2 ∙ cosκ2 )y2 + (−sinω2 )(−c)
}
Z2 = (−sinφ2 ∙ cosκ2 + cosφ2 ∙ sinω2 ∙ sinκ2 )x2 + (sinφ2 ∙ sinκ2 + cosφ2 ∙ sinω2 ∙ cosκ2 )y2 + (cosφ2 ∙ cosω2 )(−c)
...(4.1.4.3)
この場合の線形化した相互標定式は次のように表すことができる。
1
f = | x1
̃2
X
1
x
+| 1
Z̃2
by
y1
0
by bz
y
y1 −c| − | 1
̃2
X
̃2 Z̃2
Y
o
−c
x1
| δby + |̃
X2
Z̃2
bz
−c
| δφ2 +
̃2 − 1)
−(X
1
x
1
|
̃
Y2 sinφ2
y1
̃2 | δbz + |
Y
c
cosω2
1
x1
R
R
m12
x2 − m11
y2
by
y1
−̃
Y2 tanω2
by
y1
mR22 x2 − mR21 y2
bz
−c | δω
2
̃
Y2 cosφ2
bz
−c
| δκ2
mR32 x2 − mR31 y2
...(4.1.4.3)
(M=Mω Mφ Mκの場合)
左カメラに関して、
X 1 = x1
Y1 = y1 }
Z1 = −c
右カメラに関して、
...(4.1.4.4)
X 2 = (cosφ2 ∙ cosκ2 )x2 + (−cosφ2 ∙ sinκ2 )y2 + (sinφ2)(−c) + 1
Y2 = (cosω2 ∙ sinκ2 + sinω2 ∙ sinφ2 ∙ cosκ2 )x2 + (cosω2 ∙ cosκ2 − sinω2 ∙ sinφ2 ∙ sinκ2 )y2 + (−sinω2 ∙ cosφ2)(−c)}
Z2 = (sinω2 ∙ sinκ2 − cosω2 ∙ sinφ2 ∙ cosκ2 )x2 + (sinω2 ∙ cosκ2 + cosω2 ∙ sinφ2 ∙ sinκ2 )y2 + (cosω2 ∙ cosφ2 )(−c)
…(4.1.4.5)
この場合の線形化した相互標定式は、次のようになる。
1
f = | x1
̃2
X
by bz
y
y1 −c| − | 1
̃2
X
̃2 Z̃2
Y
o
|
c
cosφ2
4.2
4.2.1
−c
x1
| δby + |̃
X2
Z̃2
1
−x1
̃ 2 − 1)tanφ2
+ (X
y1
̃2 | δbz + |
Y
by
−y1
̃ 2 − 1)sinω2
−(X
1
x1
R
R
m12
x2 − m11
y2
by
y1
mR22 x2 − mR21 y2
bz
1
c
x
| δφ2 + | 1
̃ 2 − 1)cosω2
(X
0
by
y1
−Z̃2
bz
−c
| δκ2 +
mR32 x2 − mR31 y2
bz
−c| δω2
̃
Y2
…(4.1.4.6)
モデル座標の計算 model coordinates
投影中心を結ぶ場合 intersecting projection centers
左カメラの投影中心O1を座標原点(0,0,0)とする右手座標系 XYZ をモデル座標系に選ぶと、この系と左右の
カメラ座標系(xi , yi , −c)との関係は次のように表すことができる。
Xi
x1
( Yi ) = λLi ∙ ML ( y1 )
...(4.2.1.1)
−c
Zi
Xi
x2
1
( Yi ) = λRi ∙ MR ( y2 ) + (0)
...(4.2.1.2)
−c
Zi
0
ここで、回転行列(M)は式(5.5.3)、または式(5.5.4)に示すものと同様である。
上の 2 式を等しいとおくと、次のようになる。
x1
x2
1
λLi ∙ ML ( y1 ) = λRi ∙ MR ( y2 ) + (0)
...(4.2.1.3)
−c
−c
0
この3つの式を解けば、左右の写真像点の縮尺係数(λLi , λRi )は次式で表せる。
λLi = x
ym2
m1 ∙zm2 −xm2 ∙zm1
ym1
λRi = x
}
...(4.2.1.4)
m1 ∙zm2 −xm2 ∙zm1
したがって、縮尺係数が求まれば、式 4.2.1.1 および式 4.2.1.2 からモデル座標を算出できる。
4.2.2
左カメラを固定する場合 fixed left-hand projection center
この場合ML = I (単位行列)とおけるので、式 4.2.1.1 および式 4.2.1.2 は次のように書ける。
Xi
x1
( Yi ) = λLi ( y1 )
...(4.2.2.1)
−c
Zi
bx
Xi
x2
R
b
( Yi ) = λi ∙ MR ( y2 ) + ( y )
−c
Zi
bz
...(4.2.2.2)
これらの式が等しいとおいて、それぞれ縮尺係数を求めると次のようになる。
x1
λLi ( y1 )
−c
=
λRi
bx
x2
b
∙ MR ( y2 ) + ( y )
−c
bz
...(4.2.2.3)
そして
λLi =
λRi
bx ∙zm2 −bz ∙xm2
x1 zm2 +c∙xm2
−bx ∙c−bz ∙x1
=x
} ...(4.2.2.4)
1 ∙zm2 +c∙xm2
ただし、通常はbx = 1とおいた。
4.3
絶対標定 absolute orientation
絶対標定は、4.2 項の計算で求めた平均モデル座標値(X m , Ym , Zm )を使用して、観測対象の絶対座標値を求める
方法である。
モデル座標系(X, Y, Z)と地上座標系(E, N, H)との関係は、次式で表すことができる。
Xo
E
X
(N) = S ∙ M (Y) + ( Yo ) ...(4.3.1)
Zo
H
Z
ここで、
S:各点の縮率、
(Xo , Yo , Zo ):投影中心座標
モデルの回転行列(M)はM = MΦ ∙ MΩ ∙ MΚの回転順とすれば、次の要素で表される。
cosΦ 0 sinΦ
1
0
0
cosΚ −sinΚ 0
MΦ = ( 0
1
0 ) 、MΩ = (0 cosΩ −sinΩ) 、MΚ = ( sinΚ cosΚ 0)
−sinΦ 0 cosΦ
0 sinΩ cosΩ
0
0
1
cosΦ ∙ cosΚ + sinΦ ∙ sinΩ ∙ sinΚ −cosΦ ∙ sinΚ + sinΦ ∙ sinΩ ∙ cosΚ sinΦ ∙ cosΩ
M=(
cosΩ ∙ sinΚ
cosΩ ∙ cosΚ
−sinΩ )
−sinΦ ∙ cosΚ + cosΦ ∙ sinΩ ∙ sinΚ sinΦ ∙ sinΚ + cosΦ ∙ sinΩ ∙ cosΚ cosΦ ∙ cosΩ
…(4.3.2)
...(4.3.3)
そこで、式 4.4.1 を展開すると、次式になる。
fE = S[(cosΦ ∙ cosΚ + sinΦ ∙ sinΩ ∙ sinΚ)X + (−cosΦ ∙ sinΚ + sinΦ ∙ sinΩ ∙ cosΚ)Y + (sinΦ ∙ cosΩ)Z] + X o − E = 0
fN = S[(cosΩ ∙ sinΚ)X + (cosΩ ∙ cosΚ)Y + (−sinΩ)Z] + Yo − N = 0
}
fH = S[(−sinΦ ∙ cosΚ + cosΦ ∙ sinΩ ∙ sinΚ)X + (sinΦ ∙ sinΚ + cosΦ ∙ sinΩ ∙ cosΚ)Y + (cosΦ ∙ cosΩ)Z] + Zo − H = 0
...(4.3.4)
4.3.1
近似解法 approximate solution
式 4.4.4 を用い、平面座標(X,Y)と高さ(H)を分離して回転角(Φ, Ω, Κ)と投影中心の位置、すなわちモデルの移動
量(Xo , Yo , Zo )を解いてみる。
(平面位置)
式(4.4.4)においてΦ=Ω=0、Z=0 とおけば、次式が得られる。
E = S(cosΚ)X + S(−sinΚ)Y + X o
}
N = S(sinΚ)X + S(cosΚ)Y + Yo
...(4.3.1.1)
この式でa = S ∙ cosΚ, b = S ∙ sinΚ, X o = c, Yo = dとおけば、次のような平面座標の観測方程式が得られる。
a
X −Y 1 0 b
E
( )=(
)( )
Y X 0 1 c
N
d
...(4.3.1.2)
または行列記号で書けば
F=C・P
…(4.3.1.3)
この式に最小 2 乗法を適用し、正規方程式(C f) = (C T C)Pを求め、これをP = (CT C)−1(C T f)により解けば、各標
T
定要素は次のように計算することができる。
a2 + b2 = (S ∙ cosΚ)2 + (S ∙ sinΚ)2
∴ S = √a2 + b 2
∴ tanΚ =
b
a
...(4.3.1.4)
...(4.3.1.5)
∴ Xo = c
...(4.3.1.6)
∴ Yo = d
...(4.3.1.7)
(高さ)
式 4.3.4 の第3式において、cosΚ=cosΦ=cosΩ=1,sinΩsinΚ=sinΦ=sinΚ=0 とおけば、高さは次のように表せる。
H = S[(−sinΦ)X + (sinΩ)Y + Z] + Zo
…….(4.3.1.7)
この式において、A = −S ∙ sinΦ, B = S ∙ sinΩ, C = Zo とおけば、次のように高さの観測方程式が得られる。
A
(H − S ∙ Z) = (X Y 1) (B)
….(4.3.1.8)
C
または
...(4.3.1.9)
C=F∙Q
T
(F T
平面位置と同様にして、この正規方程式は(F h) =
F)Qから求められ、その解はQ = (F T F)−1 (F T h) によって
解ける。Qから次のように標定要素が算出できる。
−A
∴ Φ = arcsin(
S
...(4.3.1.10)
)
B
∴ Ω = arcsin( )
...(4.3.1.11)
∴ Zo = C
...(4.3.1.12)
S
4.3.2
同時調整 simultaneous solution
式 4.3.4 の各標定要素を次のように近似値と補正値とで表しておく。
S = S̃ + δS
̃ + δΦ
Φ=Φ
̃ + δΩ
Ω=Ω
̃ + δΚ
Κ=Κ
̃ o + δX o
Xo = X
Yo = ̃
Yo + δYo
{ Zo = Z̃o + δZo
(4.3.2.1)
そうして、補正値方程式(観測方程式、残差方程式)を書けば次のようになる。
vx
a1
Xo
̃
E
X
v
̃) − ( Yo ) + (b1
( y ) = (N) − S ∙ M (Y
vz
Zo
H
c1
Z̃
a2
b2
c2
a3 a4 a5 a6
b3 b4 b5 b6
c3 c4 c5 c6
δS
δΦ
a7
δΩ
b7 ) δΚ
δX o
c7
δYo
( δZo )
...(4.3.2.2)
ここで、ai , bi , ci は各変数(標定要素)の微係数である。
絶対標定において、E,N,H は観測値でないので、次のように条件方程式で表して、上式 4.3.2.2 の係数をこ
の式の偏微分によって解く。
fE
Xo
X
E
(fN ) = S ∙ M (Y) + ( Yo ) − (N)
Zo
fH
Z
H
∂f
a1 = ∂SE =
a2 =
∂f
∂fE
∂Φ
E-Xo
S
=H-Zo
a3 = ∂ΩE =(N-Yo )sinΦ
(4.3.2.4)
∂f
a4 = ∂ΚE =S(m12 X-𝑚11 N)
∂f
a5 = ∂XE =1
o
∂fE
a6 = ∂Y =0
o
∂f
{
a7 = ∂ZE =0
o
…(4.3.2.3)
b1 =
∂fN
b2 =
b3 =
(4.3.2.5)
∂fN
=
∂S
∂fN
∂Φ
N−Yo
S
=0
Z
= −S ∙ sinΩ (X ∙ sinΚ + Y ∙ cosΚ + tanΩ)
∂Ω
b4 =
∂fN
∂Κ
= S ∙ cosΩ(X ∙ cosΚ − Y ∙ sinΚ)
∂f
b5 = ∂XN = 0
o
b6 =
∂Yo
∂fN
=1
b7 = ∂Z = 0
{
o
c1 =
c2 =
c3 =
(4.3.2.6)
∂fN
c4 =
∂fH
∂Φ
∂fH
∂Ω
∂fH
∂Κ
∂fH
∂S
=
H−Zo
S
= −(E − X o )
= (N − Yo )cosΦ
= S(m32 X − m31 Y)
∂f
c5 = ∂XH = 0
o
∂fH
c6 = ∂Y = 0
o
{
∂fH
c7 = ∂Z = 1
o
式 4.3.2.3 から正規方程式をつくり、順次補正値を解き、絶対標定に必要な標定要素を求めていく。
Xo
E
X
(N) = S ∙ M (Y) + ( Yo )
Zo
H
Z
4.4
…(4.3.2.7)
計測全体の流れについて Summary of digital photogrammetry
本 HP の目的は、写真測量による計測法を知ることであり、またデジタル一眼レフカメラを用いて簡単に被写
体の三次元座標を求めることができるという、その計算処理について述べてきた。その計測法の全体の流れにつ
いて以下にまとめておく。
(カメラのキャリブレーション)
1) 非計測用カメラ(一眼レフ)を使用することを前提にすると、カメラキャリブレーション場を設置する。検定場
に配置する基準点の精度は 1/10,000 以上とする。撮影距離 H=10mとすると、位置誤差は 1mm程度、角度
で言うと 1/10,000×206,265”=20”読み以上の精度の TS を使用する。H=5m では 5000mm/10,000=0.5m
mの位置誤差、角度ではやはり 20”の TS を用いることができる。ただし、TS での測距精度は 2mmより大
きくなるので、これを考慮しなければならない。
2) カメラの画面の大きさ、概略焦点距離(f)と撮影距離(H)との関係を考慮し、基準点位置を決め、TS 等で正確
に検定場の XYZ 座標(数学座標系右手系)を算出する。
3) その基準点位置には、TS の反射板を貼り付け、これを撮影の際のシグナル(標識)とする。
4) 検定場の基準点数は 8 点以上 20 点ぐらいとする。
5) 使用カメラにより検定場の基準点(ターゲット、標識)を撮影する。
6) 基準点の画像座標値をコンパレータにより計測し XYZ 座標値を用いて、共線条件式(DLT)により焦点距
離、主点位置、カメラレンズ収差を算出する。
(一眼レフにより計測対象物の撮影)
7) 対象物周辺に任意の座標系(平面直角座標系)
、または GPS/TS 測量機によりで測地座標系を設定し、5 点以
上の基準点を設ける。
8) 基準点には、サイズ、背景色を考慮して、必ず標識板(シグナル、ターゲット、マーク)を取り付ける。
9) デジタル一眼レフカメラを用いて、異なる場所(3 カメラ点以上)から計測対象物を撮影する。このとき、基
線比は、1/10<B/H<1/2 となるように撮影する。
10)撮影した画像をパソコンに取り込む。
(デジタル写真測量)
11)PhotoShop などのアプリケーションを用い、写真画像上のマーク及び求めたい点を計測し、画像座標値(x,y)
を記録する。
12)2.4 項に示したヘルマート変換式、又はアフィン変換式を用いて、Abobe 社の PhotoShop などで計測した画
像座標値を写真座標値に変換する。この場合、写真画像座標系は、CCD サイズを実寸単位で求めた大きさであ
る。たとえば、3648×2736 で 1 画素当たり 1.7 ミクロンの場合、実寸は 6.20mm×4.65mmとなる。
13)写真座標値を用い、相互標定を行う。
14)モデル座標の計算を行う。
15)モデル座標値と絶対座標値を用い、絶対標定を行う。
16)ベクトル計測はステレオ観測により実施する。ベクトル(等高線)より DEM を作成するか、ステレオモデ
ルの自動相関により DEM を構築する。
17)元画像と DEM によりオルソ画像を作成する。
(文章作成 1997 年、修正更新追加 2009 年 5 月、11 月、2010 年 3 月 22 日作成者小林和夫)
参考文献
小林和夫、上野郁夫、ポケコンプログラムによる測量計算法、山海堂、1994 年 2 月
Kobayashi, K., and C. Mori, Relations between the coefficients in the projective transformation equations
and the orientation elements of a photograph, PE & RS, Vol.63, No.9, September 1997, pp. 1151-1127.
© Copyright 2026 Paperzz