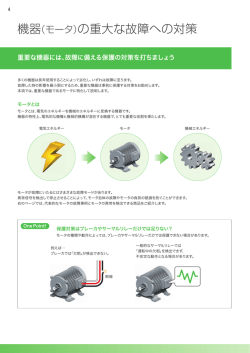
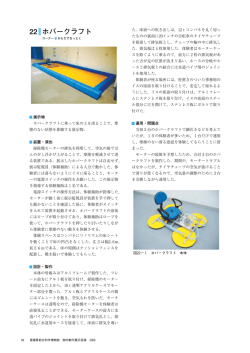
が3次元ものづくりの扉をあけます! 実機レスでメカ動作をシミュレートしたいと思ったことはありませんか? ImageMech なら、安価に簡単にそれを実現します! 三気アーキテクト有限会社 開発の動機 市場には、高機能な仮想メカシミュレータが販売されています。それらは、1セット何百万円 もする高価なものであり、導入教育や生産プロセスの変更などに必要な費用も含めると、中 小企業には3次元ものづくりをしたいと思っても、なかなか手のでるものではありません。 中小企業が3次元ものづくりで、一番優先度が高いと考えていることは何でしょうか。 まずは、それを知ることから始まりますが、実機レスシミュレーションの分野では、小社が 開発している Hardware In The Loopシミュレーションに特化した仮想メカ 「ImageMech」 が、その解決のひとつになるのではないかと考えています。 ImageMechの全体像 ImageMech(パソコン) 制御ボード モータ 信号 サーボ制御 メカ変位制御 DC ブラシ ステッ モータ レス ピング モータ モータ 直線 動作 回転 動作 カム 動作 リンク 動作 センサ制御 センサ 信号 ユーザー用意の実機を使用 (Hardware in the Loop シミュレーション) * 機構部定義の内容 部品の親子関係 部品の初期位置 ● 部品の運動種別 直線運動 回転運動 カム動作 ワーク搬送 ④ 部品の単位運動量 ⑤ センサ情報 ⑥ 入力パルス情報 ● ● ** 視点制御の内容 上下左右の移動 X/Y/Z軸回りの回転 ● ズームイン/ズームアウト ● そ の 他 機構部定義 * 視点制御 動作保存 ** 衝突判定 ワーク搬送 レンダリング 機構部の3次元モデルデータ (注)上図で ステッピングモータ のようにピンクに なっている箇所はプログラム実装完了部です。 上図のように ImageMech は、モータ駆動部、モー タ本体、モータ負荷(機構部)をシミュレートします。 ユーザーは機構部の3次元モデルデータを用意 し、機構部の定義を行えば、機種が変わっても、 ImageMech をそのまま使用できます。 ● 1/2 シミュレーションの限界 実物を100%シミュレーションするには、摩擦や多慣性など様々な物理現象(力学)を計算 しなければなりません。しかし、これはリアルタイム性や複雑性を考えると、困難になります。 「ImageMech」では、理想的な動きを再現することとし、複雑なダイナミクス(力学)計算を 出来る限り簡略化し、メカ機構のキネマティクス(運動学)を、リアルタイムに再現できるよう にしました。 デモシステム(ステッピングモータの開ループ シミュレーション) メカ制御部 I/Oボード モータ制御ボード ImageMech モータ信号 (X,Y,Z,U軸) USB メカ制御画面 USB センサ信号 (原点位置, リミット位置) 正逆パルス 仮想メカ3次元表示 立フライス盤 テーブル(X軸) ニー(Y軸) サドル(Z軸) 主軸(U軸) X軸センサ信号 Y軸センサ信号 Z軸センサ信号 (注)実際には、上記の2台のパソコンの処理を、1台にまとめてデモしています。 ImageMech 開発環境(デモシステム開発時) OS CPU メモリ ビデオボード グラフィックAPI IDE モデリングツール Windows XP Professional SP2 2.73GHz 512MB Radeon X300 SE(128MB) DirectX 9.0 Visual Studio.NET2003(VC++) Metasequoia 使用したボードを以下に記します。 モータ制御ボード:PMC-S4/00/00A-U (株式会社ワイツー) I/Oボード:USBM3069F (テクノウェーブ株式会社) 2/2
© Copyright 2026 Paperzz