画像電子学会
The Institute of Image Electronics
Engineers of Japan
年次大会予稿
Proceedings of the Media Computing Conference
仮想空間における人物行動の記憶生成過程に関する一考察
A Study on Memory Generation Process of Human Behavior in a Virtual Space
林 慶和†
Yoshikazu HAYASHI†
張 英夏†
向井 信彦†
Youngha CHANG†
and Nobuhiko MUKAI†
†東京都市大学大学院 工学研究科
†Graduate School of Engineering, Tokyo City University
E-mail: †{hayashi, chang, mukai}@vgl.cs.tcu.ac.jp
1. ま え が き
近 年 ,コ ン ピ ュ ー タ グ ラ フ ィ ッ ク ス (CG)技 術 は 建 築
物などの景観シミュレーションだけでなく,仮想空間
内における人物行動の生成にも用いられている.仮想
空間内における人物行動の生成には, 実際に歩行者が
歩いた軌跡データを取得し,取得データを基に歩行経
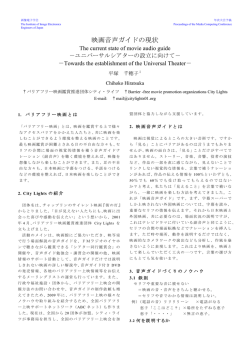
図 1
路を一般化して仮想空間内の人物に与えることで人物
仮想空間の構成要素
行 動 を 生 成 す る 研 究 [1]が あ る が ,人 物 行 動 の 目 標 地 点
と通過点が限定されており,人物の移動経路に多様性
がないという問題点がある.また,仮想空間内の人物
の歩行経路をインタラクティブに決定し, 人物行動を
3. 人 物 行 動 の 生 成
仮想空間内における人物行動生成の流れを以下に
示す.
生 成 す る 研 究 [2]も あ る が ,ユ ー ザ が 歩 行 経 路 を 決 め な
ければならず,自律的な人物行動を生成できないとい
1)
パスの中央を直進するための歩行方向の変更
う問題点がある.このように, 仮想空間内における人
2)
空 間 (前 方 ,曲 が り 角 ,ノ ー ド ,ラ ン ド マ ー ク )の
物行動をユーザが制御する場合 ,人物行動の生成には
認識
多大な労力を要する.したがって,自律的な人物行動
3)
移動方向の決定
の自動生成が必要となる.
4)
移動あるいは方向転換
このため我々は,仮想空間内の人物に視界を与え,
視界から得られる情報を基にした自律的な 人物行動の
仮想空間内の人物はノードやランドマークを正し
シ ミ ュ レ ー シ ョ ン を 行 っ て き た [3].し か し な が ら ,従
く認識するために,歩行方向を変更しながら パスの中
来の研究では視界から得られる情報は一過性のもので
央 を 歩 行 す る .さ ら に ,パ ス の 歩 行 中 に 空 間 (曲 が り 角 ,
あり,記憶という概念がなかった.
前 方 ,ノ ー ド お よ び ラ ン ド マ ー ク )を 認 識 し ,方 向 転 換
そこで本稿では,視界に入る分岐路や分岐路周辺に
あるランドマークを認識し,認識結果を人間の頭の中
を行いながらノード間を移動する.以下に,人物行動
生成の流れの各項目について具体的に説明する.
にある空間的特性を持つイメージである認知地図情報
として記憶する手法を提案する.
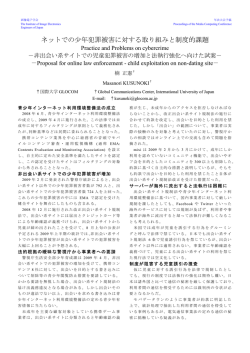
3.1 歩 行 方 向 の 変 更
2. 仮 想 空 間 の 環 境 設 定
く認識できるように,歩行中はパスの中央を歩行させ
仮想空間内の人物がノードやランドマークを正し
仮想空間の環境設定を行うために仮想空間内の構
る.図 2 にパスの端を歩行している人物を上から見た
成 要 素 を 森 ら の 研 究 [4]に 従 っ て 図 1 の よ う に 定 義 し ,
様 子 を 示 す .こ こ で ,dl と dr は 視 界 の 範 囲 内 に お け る
定義に基づいて仮想空間を作成する.人物は視界から
左 右 の エ ッ ジ ま で の 最 短 距 離 で あ る . ま ず dl と dr を
得られる色情報を基に物体を認識しているため,仮想
取 得 し ,⊿ d lr =|dl-dr|を 求 め る .⊿ d lr が 一 定 の 閾 値 以 上
空間内の各ノードや各ランドマークにはそれぞれを識
の場合,人物はどちらかのエッジに寄って歩行してい
別できるように,異なる色情報を設定する .本研究で
る た め , 歩 行 方 向 を 変 更 す る . 歩 行 方 向 は , dl < dr の
は , ノ ー ド の 識 別 に RGB の B を , ラ ン ド マ ー ク の 識
場 合 は 右 方 向 , dl > dr の 場 合 は 左 方 向 に 一 定 の 角 度 θ
別 に RGB の R を 用 い ,ノ ー ド と ラ ン ド マ ー ク に は 識 別
分 変 更 す る . 図 2(a)で は , 人 物 が 左 の エ ッ ジ に 寄 っ て
に用いる色情報を順次設定する.
歩 行 し て い る た め , 図 2(b)の よ う に 右 方 向 に 歩 行 方 向
を変更する.
画像電子学会
The Institute of Image Electronics
Engineers of Japan
年次大会予稿
Proceedings of the Media Computing Conference
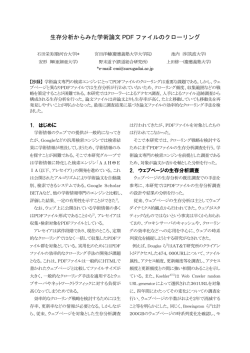
3.3 ノ ー ド と ラ ン ド マ ー ク の 認 識
仮想空間内の人物はパスの中央を歩行しているため,
視界の中心付近を縦に走査することでノードを認識で
き る .図 4(a)に ノ ー ド 認 識 に 必 要 な 視 界 の 走 査 を 示 す .
視界を左右に 2 等分する境界線を中心線として,中心
線から左右一定の範囲内にある画素を縦に下から上ま
で走査し,距離が一定以内であれば前方にはノードが
(a) 歩 行 方 向 変 更 前
(b) 歩 行 方 向 変 更 後
図 2 歩行方向の変更
存在すると認識する.また,ランドマークの認識では
図 4(b)に 示 す よ う に , ノ ー ド を 認 識 し た 後 , 人 物 の 視
線の高さに対応する範囲の画素を左から右へ走査し,
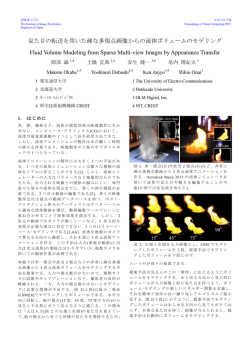
3.2 曲 が り 角 と 前 方 の 認 識
ノードの周辺にある 4 つのランドマークを認識する.
仮 想 空 間 内 の 曲 が り 角 は ,田 中 の 研 究 [3]に お け る 分
岐路の認識方法を用い,人物が視界から得る奥行き情
報 (距 離 )に 基 づ い て 認 識 す る . 人 物 の 視 界 で 捉 え る 画
像の横方向に隣接する 2 画素にエッジが写っている場
合 ,2 画 素 ま で の 距 離 を d1 お よ び d2 と し ,2 画 素 ま で
の 距 離 の 差 の 絶 対 値 |d1-d2|を ⊿ d と す る . 図 3 に , 曲
がり角が存在しない場合と存在する場合の隣接する 2
画 素 の 距 離 を 示 す . 図 3(a)に 示 す よ う に エ ッ ジ が 続 い
て い る 場 合 , ⊿ d の 値 は 小 さ い が , 図 3(b)の よ う に ,
(a) ノ ー ド の 認 識
(b) ラ ン ド マ ー ク の 認 識
図 4 ノードとランドマーク認識のための画面走査
隣接する 2 画素間に曲がり角が存在する場合,⊿d の
値 は 大 き く な る .図 3 (c)に 曲 が り 角 が な い 場 合 ,図 3(d)
には曲がり角がある場合の隣接する 2 画素を赤い矩形
3.4 移 動 方 向 の 決 定
曲がり角や前方の認識結果を基に,ノードを直進,
で示す.⊿d が設定した閾値より大きい場合,曲がり
左折,あるいは右折するのかを決定する.曲がり角,
角が存在すると認識する.
あるいは前方を認識した結果から移動できない方向を
削除し,残った移動可能な方向からランダムに 1 つの
方向を選択して移動方向とする.
3.5 方 向 転 換
方向転換は左折,あるいは右折する場合に必要であ
り ,田 中 の 研 究 [3]に お け る 分 岐 路 認 識 の 際 の 注 視 点 移
動動作を拡張することで行う.図 5 に,左折の例を示
(a) 曲 が り 角 な し
(鳥 瞰 図 )
(b) 曲 が り 角 あ り
(鳥 瞰 図 )
す . ま ず , 認 識 さ れ た 曲 が り 角 (ラ ン ド マ ー ク の 角 )の
方向と現在の注視点の方向とのなす角 φ を求める.φ
の値が閾値以上であれば,ランドマークの角がある方
向に注視点の向きを一定の角度分変更する.ただし,
注視点の変更のみでは,視線方向が変わるだけで,曲
が り 角 は 曲 が れ な い .そ こ で ,視 線 方 向 の 変 更 に 伴 い ,
人物の歩行方向もランドマークの角の方向に一定の角
度分変更し,曲がり角における方向転換を行う.
(c) 曲 が り 角 な し (視 界 )
(d) 曲 が り 角 あ り (視 界 )
図 3 曲がり角の認識
前方も奥行き情報に基づいて認 識できる.視界の中
心付近の矩形領域内を走査し,前方のエッジ までの距
離を調べる.矩形領域内に一定の閾値以内の距離を持
つ画素があれば,前方にはランドマークがありパスが
存在しないと判断する.
図 5
方向転換
画像電子学会
The Institute of Image Electronics
Engineers of Japan
年次大会予稿
Proceedings of the Media Computing Conference
4. 記 憶 の 生 成
人間は空間の構造を認知地図という形で記憶してい
る.認知地図にはルートマップ型とサーベイマップ型
の 2 つ の 形 式 が あ る [5].ル ー ト マ ッ プ 型 は ,経 路 進 行
中に遭遇した対象物を,遭遇した順番通りに順序付け
てできる認知地図である.また ,人間の視点から見た
図 8
映像の集まりであり,空間を局所的に理解するもので
サーベイマップ型認知地図内の方向
ある.一方,サーベイマップ型は,複数の対象物の配
置を同時に表象する認知地図である.また,空間全体
サーベイマップ型認知地図の生成手法を以下に示
を 見 渡 す 鳥 瞰 図 (地 図 )で あ り , 空 間 を 大 局 的 に 理 解 す
す.下記手法を用いることで,人物が仮想空間内を歩
るものである.一般的に,人間の記憶はルートマップ
行しながら生成したルートマップ型認知地図から,サ
型の認知地図からサーベイマップ型の認知地図に変換
ーベイマップ型認知地図を生成できる.
さ れ る と 考 え ら れ て い る [5].そ こ で 本 稿 で は ,仮 想 空
間内の人物が歩行中に生成した ルートマップ型の認知
1)
れると,サーベイマップ型認知地図内の方向と
地図をサーベイマップ型の認知地図に変換して記憶す
人物の位置座標を取得する.
る手法の提案を行う.
2)
を基に,パスとノードをサーベイマップ型認知
人物の歩行によって認識されたノードやランドマ
地図に描く.
ーク,移動方向,および移動距離の情報は,通過した
3)
ルートマップ型認知地図での移動方向が左折ま
たは右折の場合,曲がり角にあるランドマーク
て記憶する.ただし,今回用いた仮想空間は,全ての
をサーベイマップ型認知地図に描く.
パスの長さが一定のため,移動距離の情報は一定値と
する.人物が仮想空間内を歩行しながら,新しいノー
サーベイマップ型認知地図内の方向,人物の位
置座標,および 1 つ前のノードからの移動距離
4.1 ル ー ト マ ッ プ 型 認 知 地 図 の 生 成
ノード毎に順次まとめ,ルートマップ型認知地図とし
新たなルートマップ型認知地図の要素が生成さ
4)
ルートマップ型認知地図での移動方向に応じて
ドを認識する度に,ノード毎にまとめた情報を保存す
サーベイマップ型認知地図内の方向および,人
ることで,図 7 に示すような通過したノード順に情報
物の位置座標を更新する.
が対応付けられたルートマップ型認知地図を生成する.
図 9 に,人物が仮想空間内を歩行しながら生成した
ルートマップ型認知地図を基にして生成したサーベイ
マップ型認知地図を示す.図 9 は,1 つ目のノードを
直進し,2 つ目のノードにある青色のランドマークを
右折した時のサーベイマップ型認知地図である.サー
図 7
ルートマップ型認知地図要素の対応付け
ベイマップ型認知地図では,仮想空間内の人物の初期
位 置 を 赤 い 円 , 人 物 の 歩 行 経 路 (パ ス )を 赤 い 線 分 , ノ
4.2 サ ー ベ イ マ ッ プ 型 認 知 地 図 の 生 成
サーベイマップ型の認知地図を生成するためには,
ルートマップ型で記憶している 移動方向とサーベイマ
ードを黒い矩形で描いている.なお,ランドマークは
左折あるいは右折の場合のみ,曲がり角にあるランド
マークの色を矩形で表示している.
ップ型認知地図内の方向を対応付ける必要がある. 図
8 に,サーベイマップ型認知地図内の方向を示す.本
研 究 で は ,人 物 の 歩 行 は 最 初 に 必 ず 直 進 す る こ と と し ,
この直進方向を図 8 の 1 番の方向としてサーベイマッ
プ型認知地図内の方向と対応付ける.直進の次に右折
する場合,サーベイマップ型認知地図内では 1 番の方
向を向いているときに右折したことにな り,サーベイ
マップ型認知地図内の方向を 2 番に更新する.その後
左折した場合,サーベイマップ型認知地図内の方向は
再び 1 番となる.また,サーベイマップ型認知地図内
の人物の初期位置は,画像の中心座標とする.
図 9
サーベイマップ型認知地図の例
画像電子学会
The Institute of Image Electronics
Engineers of Japan
5. シ ミ ュ レ ー シ ョ ン
年次大会予稿
Proceedings of the Media Computing Conference
図 10(a)は 初 期 状 態 で あ り 認 知 地 図 は 生 成 さ れ て い
人物を仮想空間内で歩行させ,空間構造の記憶であ
な い . 図 10(b)で は , 1 つ 目 の ノ ー ド を 通 過 し , 2 つ 目
る認知地図を生成するシミュレーションを行った. シ
に認識したノードを左折したため ,ルートマップ型認
ミュレーションでは,人物が仮想空間内を歩行しなが
知地図内左に存在する青色のランドマークがサーベイ
らルートマップ型認知地図を生成し,生成された ルー
マ ッ プ 型 認 知 地 図 に 描 か れ て い る . 同 様 に , 図 10(c)
トマップ型認知地図からサーベイ マップ型認知地図を
でも左折するときに認識した緑色のランドマークが サ
生成する.また,生成された認知地図の正確性を確認
ーベイマップ型認知地図に描かれ,6 つ目のノード認
するため,生成したルートマップ型認知地図のみを基
識時におけるルートマップ型およびサーベイマップ型
にした歩行動作を生成し,生成された歩行経路の観測
認 知 地 図 は 図 10(d)に 示 す 結 果 と な っ た .こ の よ う に し
結果と,歩行の基になったルートマップ型認知地図か
て,ルートマップ型からサーベイマップ型の認知地図
ら生成したサーベイマップ型認知地図を 比較した.
が生成できていることが判る.
図 10 に ,6 つ の ノ ー ド を 認 識 す る ま で の 歩 行 に 伴 っ
また,生成されたルートマップ型認知地図を基にし
て 生 成 さ れ た ル ー ト マ ッ プ 型 認 知 地 図 (人 物 の 見 た 局
た歩行動作の観測結果と,ルートマップ型認知地図か
所 的 映 像 ),お よ び ル ー ト マ ッ プ 型 認 知 地 図 か ら 生 成 し
ら生成したサーベイマップ型認知地図の比較結果を図
た サ ー ベ イ マ ッ プ 型 認 知 地 図 (鳥 瞰 画 像 )を 示 す . 今 回
11 に 示 す . 図 11(a)の 観 測 結 果 と , 図 11(b)の サ ー ベ イ
のシミュレーションでは,人物が取得する視野画像の
マップ型認知地図は同じ経路を辿っているため,認知
解 像 度 を 400×200 と し た .
地図を基に同じ道を歩行することができ,記憶が正し
く生成されていることが確認できた.
6. ま と め
本稿では,仮想空間内の人物に認知地図という形で
記憶を生成する手法を提案した.シミュレーションの
人物の位置
(a) 初 期 状 態
結果,ルートマップ型認知地図からサーベイマップ型
認知地図を生成することができ,生成された認知地図
を基に元と同じ歩行動作を再現することができた. し
かしながら,本稿で用いた仮想空間の構造は単純で現
実空間と異なるため,より現実に近い構造 をした仮想
人物の位置
ルートマップ
サーベイマップ
(b) 2 つ 目 の ノ ー ド 認 識 時
空間におけるシミュレーションを行い, より現実に近
い空間の認識と認知地図の生成方法を検討する必要が
ある.また,本シミュレーションでの人物は, 一度認
識した内容は全て記憶しているため,今後,記憶の定
着や忘却など,より人間に近い記憶の生成手法も検討
する予定である.
人物の位置
ルートマップ
サーベイマップ
(c) 4 つ 目 の ノ ー ド 認 識 時
人物の位置
ルートマップ
サーベイマップ
(d) 6 つ 目 の ノ ー ド 認 識 時
図 10 認 知 地 図 の 生 成 (2, 4, 6 つ 目 の ノ ー ド 認 識 時 )
(a) 歩 行 の 観 測 結 果
図 11
(b) サ ー ベ イ マ ッ プ 型
認知地図
歩行経路と認知地図の比較
文
献
[1] 板 倉 豊 和 , 石 田 亨 , “ 歩 行 者 軌 跡 デ ー タ を 用 い た
仮想都市群集シミュレーション”, 情処学研報,
MBL, Vol.28, pp.263-270 2005.
[2] Jongmin Kim, Yeongho Seol , Taesoo Kwon ,
Jehee Lee ,
“Interactive Manipulation of
Large-Scale Crowd Animation”, ACM Trans. on
Graphics, Vol.33, No.4, Article 83, 2014.
[3] 田 中 研 介 , “ 仮 想 空 間 に お け る 個 人 行 動 の 生 成 と
群 集 シ ミ ュ レ ー シ ョ ン へ の 応 用 ”, 東 京 都 市 大 学
大 学 院 修 士 論 文 , 2014.
[4] 森 晃 徳 , 岩 井 敦 子 , “ 認 知 地 図 ” ,信 学 誌 , Vol.77,
No.8, pp.836-839, 1994.
[5] 横 澤 一 彦 , 和 田 絵 里 香 , 光 松 秀 倫 , “ 仮 想 空 間 に
お け る 認 知 地 図 の 形 成 と 変 換 ”,信 学 論 , Vol.J87-A,
No.1, pp.13-19, 2004.
© Copyright 2026 Paperzz