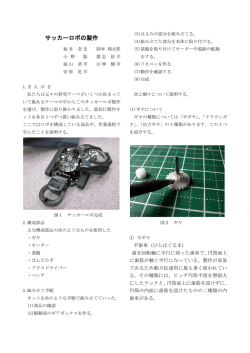
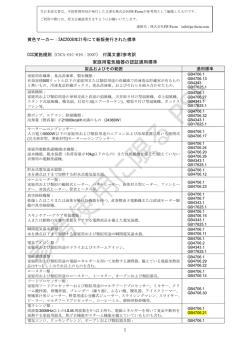
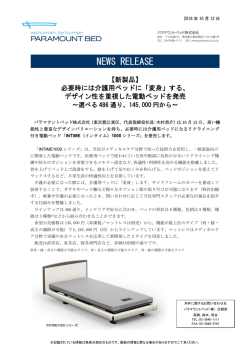
プレマテスを使った テストシステムのご紹介 1章 はじめに 私共の会社では、常に新しい技術を吸収しその技術をもってお客様に提案できる企業体 として業務に取り組んでおります。 今回ご紹介する「プレマテスを使ったテストシステム」については、最新の大規模FP GA( Field Programmable Gate Array )を採用し、お客様からのさまざまなご要望に対 して最低限のハードコストでお答えできるようなシステムとして開発されました。 このシステムを採用されれば、メカニズムのチェック・評価用に従来専用の制御回路を 設計・製作していた業務がこのシステム一台で汎用的に使用できます。 “プレマテス”とは、P Purpose Reprogrammabl Machinery Test System の略であり、高 速・高性能・低コスト・汎用型のメカテストシステムを表します。 1.1.システムのご紹介 本システムは、CPUボードとFPGA搭載の汎用ボードから構成され、これらのボ ードをFA( Factory Automation )で実績のあるVMEbus上で動作させています。 汎用ボード上のFPGAが受け持つ機能とCPUが受け持つ機能を最適化すること により、従来のCPUのみによる制御に比べ、はるかに高速な制御が可能となっていま す。 これは、最近特に高速化されたメカを制御しながらデータ処理もしなくてはならない 様な用途に最適です。 また、汎用ボードのFPGAにより、たとえ機能が変更になってもボード自身のパタ ーン変更やLSIの取り替え作業などは必要ありません。このFPGAは、ハードウェ ア記述言語( HDL )により設計しており、色々な機能に柔軟に対応できます。 さらに、VMEbus用の高速なCPUボードを採用できるため、従来アセンブラで 記述することの多かった制御プログラムをCやC++などの高級言語で記述できます。 この事は、高級言語のメンテナンス性の良さから仕様変更の多いテストシステムの場 合、開発コストを押さえることができます。 汎用ボード及び本システムのイメージ図を、次ページの図1に示します。 1 FPGA FPGA FPGA 汎用ボードイメージ図 テストシステム本体 (CPUボードと汎用ボードを設置) メカ制御用パソコン パソコン本体 コネクタにて接続 ドライバーボックス ターゲットメカ 図1 システム構成イメージ図 2 2章 システムの特徴 【 FPGAを使用した汎用ボードの導入 】 汎用ボードに機能を自由にプログラムできるFPGAを導入しました。 ボードの機能をFPGAで実現する事により、CPU以外の機能(論理回路)を一種類 の汎用ボードで構成することができます。 FPGAによりハードロジックが容易に実現できます。この為、従来ソフトウェアで 行っていた処理をハード化し高速化を計ったり、FPGA自身の高性能化により今後の 高精度、高速度なターゲットに対応することができます。 【 VMEbusの導入 】 FAの分野などで制御用のシステムバスとして実績のあるVMEbusを導入しま した。 VMEバスの高速性・高信頼性や、このバス用の高性能なCPUボードの採用によ り、ソフトウェアの処理速度やデーター処理速度・信頼性を向上させることができま す。 【 高級言語の導入 】 制御用のプログラミング言語として高級言語を導入しました。 システムバスの性能やCPUの処理速度が高いことから、従来アセンブラで書かれる ことが多かったこの種の制御ソフトにC言語を使うことが可能となりました。 また、C++を採用すればオブジェクト志向プログラミングにより、制御ソフトウェア の資産継承を計ることも可能となっています。 これらにより開発期間の短縮や仕様変更のしやすさ、保守の効率を高めることが可能 となっています。 【 リアルタイムOSの導入 】 制御用OSとして最適なリアルタイムOSを導入しました。 リアルタイムOSにより、複雑な制御をプログラムする場合でもタスク処理に分け、 そのタスクをC++のオブジェクト( CLASS )とすることによって、より容易にプログラ ミングすることができます。 【 開発環境の強化 】 よりデバッグのしやすいソースレベルのデバッガーを導入しました。 ソースデバッガーにより効率の良いデバック作業を行うことができ、開発期間を短縮 できます。 3 3章 開発例のご紹介 本システムを使って、開発段階のメカを検証するためのチェッカーとして、またメカ の生産工程での機能確認のためのテストシステムとして応用した例をご紹介します。 このシステムは、入力データをバッファリングするボード、データの変換とメカのタ イミングに合わせて転送するボード、メカを駆動するためのステッピングモータの制御 ボードで構成され、これらのボードに汎用ボードを使っています。 3.1.本システム導入の効果 【 ボードの種類の最少化 】 従来は開発メカのターゲットに合わせて新規にボードを設計したり、以前からあるボ ードを変更するなどの作業を行って対応していました。 また、メカが少しでも変更になるとそれに合わせてボードも変更しなくてはならない 場合が多く、パターンカットやジャンパー線で対応したり、時にはサブボードを付ける ような場合もありました。 この様に、ターゲット毎に何種類ものボードが必要となっていたものが、FPGAを 使った汎用ボードを使うことにより一つのボードに集約することができました。 【 ソフトウェアの負担軽減とデータ処理の高速化 】 従来ではデータの転送にCPUを使ったソフトウェアに任せている場合が多かったの ですが、この処理をFPGAに移すことによりCPUのソフトウェアの負担を大幅に軽 減することができました。 また、最近の高速メカ、高速データ転送にもFPGAによるハードウェア処理により 対応することができました。ソフトウェアによる処理に比べ、はるかに高速な処理が可 能となります。 【 開発コストの削減 】 FPGAを利用した汎用ボードを使うことにより、メカ毎に専用のボードを製作する 必要がなくなるため、ボードの初期費用などが不要になりました。 また、従来では回路設計のミスがあった場合ボードのパターンカットやジャンパ作業 で対応していましたが、この汎用ボードを使うことによりFPGA内のハードロジック をいつでも変更できるため、余分な作業が発生せずこのコストも削減できました。 4 3. 2.システム構成 3.2.1.ハードウェア構成 テストシステムのハードウェア構成を図2に示します。 テストシステム全体 テストシステム本体 CPUボード データ、コマンドなど V M E b u s データ入力ボード ホストPC イメージバッファ基板 イメージバッファ基板 (2回路2色分) 画像データ (2回路2色分) バッファボード 出力データ ドライバーボックス 出力データ 3.ヘッド制御基板 3.ヘッド制御基板 出力制御ボード ターゲットメカ 出力データ ドライバーボード制御 ヘッドドライバー ヘッドドライバー ヘッドドライバー 出力ドライバーボー 基板 ヘッドドライバー 基板 出力ドライバー 基板 ド 基板 ボード 出力駆動波形 ヘッド ヘッド ヘッド ヘッド ヘッド 出力ユニット 出力タイミング信号 モーター制御基板 モーター制御基板 モーター制御基板 (2回路) モーター制御ボード モーター駆動データ モーター駆動波形 センサーデータ モータードライバー モータードライバー モータードライバー モータードライバー 基板 モータードライバー 基板 モータードライバー 基板 モータードライバー 基板 モーター 基板 基板 基板 ドライバーボード センサー状態 モーター モーター モーター モーター モーター モーター モーター モーター センサー は汎用ボードを使用 図2テストシステムハードウェア構成図 【 汎用ボードについて 】 汎用ボード1枚に付きモーターや出力ユニットなどを2系統制御できる設計になっていま す。また、汎用ボードには、サブボードを装着することができ、汎用ボードに含まれない特 殊な機能を実装することができます。 (例えば、アナログ PLL 回路や DSP 回路など) システムとして、汎用ボードの使用枚数は、制御するターゲット数により決定します。 図2の例では、汎用ボード4枚でモーターを8個制御しています。 また、汎用ボード3枚で6個の出力ユニットを制御し、ホスト PC からのデータ受信用に1枚 の汎用ボードを使用しています。 汎用ボードは、1システムで最高16枚まで使用することができます。 5 3.2.2.ソフトウェア構成 テストシステムのソフトウェア構成を図3に示します。 サービス関数 インターフェース サービス関数 インターフェース テスト システム プログラム モーター制御 サービス関数 制御 モーター制御ボード データー入力 サービス関数 制御 データー入力ボード 制御 出力制御ボード 制御 CPUボード上のI/O (シリアルポート等) 制御 画像データバッファボード リアルタイムOS 図3 テストシステムソフトウェア構成図 6 3.3.ボード仕様 3. 3.1.汎用ボード 【 FPGA 】 □ゲート数 4,000(2.5K∼16K まで),レジスタ数 452(282∼1,500 まで), 外形 120 ピン PQFP を1個搭載(VMEbus インターフェイス用) □ゲート数 30,000(10K∼100K まで),レジスタ数 1,968(720∼5,392 まで), 外形 240 ピン RQFP を2個搭載(ユーザー用) 【 RAM容量 】 512Kbytes (128K を4個) 3.3.2.CPUボード 【 MPU M PU 】 モトローラ社MC68LC040を搭載 【クロック】 25MHz 【ROM容量】 EPROM 512Kbytes and FlashMemory 512Kbytes 【RAM容量】 SRAM 2048Kbytes (DRAM 1024∼4096Kbytes も選択可能) 3.3.3.画像データバッファーボード 【 FPGA 】 □ゲート数 8,000(2.5K∼16K まで),レジスタ数 452(282∼1,500 まで), 外形 120 ピン PQFP を1個搭載(VMEbus インターフェイス用) □ゲート数 12,000(2.5K∼16K まで),レジスタ数 1,188(282∼1,500 まで), 外形 240 ピン PQFP を2個搭載(ユーザー用) 【 RAM容量】 10Mbytes 7
© Copyright 2026 Paperzz