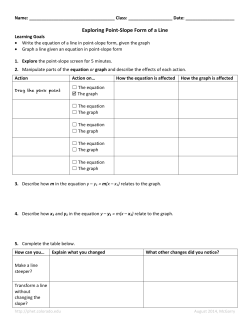
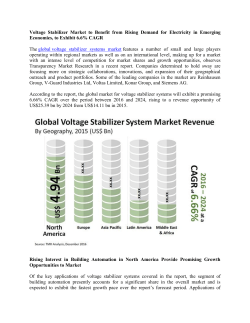
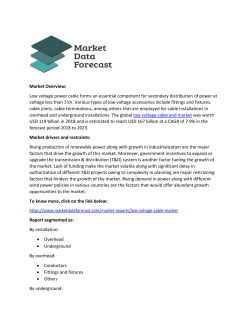
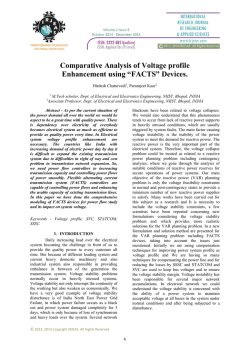
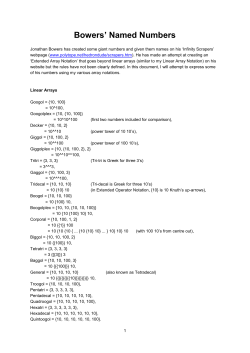
Summary of Maximum Power Point Tracking Methods for Photovoltaic Cells Jeff Israel Introduction: Photovoltaic (PV) cells are nonlinear devices, and as a result the output power is dependent on their bias point. Power can be optimized by biasing the PV cell’s voltage at the maximum power point (MPP). The MPP varies with changes in irradiance, temperature, age, and a number of other conditions. These variations are also nonlinear, which further complicates maximum power output. Optimal biasing can be achieved using a DC-DC power converter with a controller capable of maximum power point tracking (MPPT). Techniques for MPPT vary. Some techniques for maximum power point tracking employ changing the bias point and measuring changes in output, while others use predetermined PV models for estimating the MPP. This paper summarizes some of the more popular MPPT methods. Table 1 shows all the MPPT methods described in this paper. Table 1: Table of various MPPT methods MPPT Method 1. Perturbation & Observation 2. Hill Climbing 3. Incremental Conductance 4. Power Feedback Control 5. Fractional Short Circuit Current 6. Fractional Open Circuit Voltage 7. Computational & Lookup Table 8. Current Sweep 9. Fuzzy Logic 10. Array Reconfiguration Photovoltaic Cell Model [4]: The model for PV cells used in this paper’s simulations is a simplified model which neglects parameters that only have a marginal effect. Equation 1.0 shows the model used in this paper, where I is the cell current, I ph is the current from photo generation, Is is the saturation current, q is an electron’s charge, V is the voltage across the cell, k is Boltzmann’s constant, and T is the temperature in degrees Kelvin. qV kT (1.0) I (V , Ip, T ) I ph Is (e 1) In the simulations, the I-V curves were generated for a number of I ph and T values, and Is was assumed constant. In a more complete model, Is contains parameters that depend on T. A better model of Is is shown in equation 1.1, where A is the area of the cell, Dn/p is the electron/hole diffusion constant, n p 0 is the electron density in the p-type material, pn 0 is the hole density in the ntype material, and Ln / p is the electron/hole diffusion length. Dn n p 0 D p p n 0 Is qA (1.1) L L n p In equation 1.1 Dn/p is proportional to T, and Ln / p is proportional to T . The relationship between pn 0 , n p 0 and T is much more complex as described in [4] section 2.6.4.4. A more complete relationship of cell current and temperature taking the dependence of Is on T is shown in eq. 1.2. I (T ) T a (1.2) T However, within the temperature range of Earth, Is has a marginal relationship with T and is ignored. A number of other parameters such as the ideality eT 1. Perturbation and Observation Method [1]: The Perturbation and Observation Method (P&O) is one of the most popular MPPT methods because of its simplicity. The P&O method operates by making small incremental changes in voltage and measuring the resulting change in power. By comparing the current power measurement to the previous power measurement, the P&O method selects the direction for the next perturbation. The direction the next perturbation will take is described in table 2. Table 2: Table of operation for the P&O, and Hill Climbing MPPT methods. [3] Perturbation Change in Power Next Perturbation Positive Positive Positive Positive Negative Negative Negative Positive Negative Negative Negative Positive The P&O MPPT method can be implemented using a minimal amount of components; however its speed is limited by the size and the period of the perturbation. The P&O method also has the problems of erroneous responses to quick changing conditions, and in steady state conditions will oscillate around the MPP causing losses. A more advanced technique for choosing direction can be employed by comparing the current power to the two previous power points, which helps reduce errors. 2. Hill Climbing: The hill climbing method uses the ‘Hill like’ nature of the photovoltaic power versus duty cycle curve. It uses the same method for MPPT as the P&O method except it perturbs the duty cycle instead of the voltage. 3. Incremental Conductance Method [1]: The Incremental Conductance Method (ICM) measures the voltage and current to find the instantaneous conductance, and incremental conductance. This method finds the MPP by pushing its operating point to the level where change in power over change in voltage equals zero. This can be seen in Figure 1 where the MPP is the point where the slope is zero. dP d (V I ) dI V I (2.0) dV V dV Using equation 2.0, the sign of the change in power over change in voltage determines the direction of the next perturbation, and if the result of equation 2.0 is zero there is no perturbation. Under most conditions the MPP tends to changes very slowly, so the IMC does not have the issue of oscillation at the MPP like the P&O Method. 0.018 0.016 0.014 0.012 0.01 P(W) factor, and internal resistance are also ignored for simplicity. I ph also has various dependencies, however for this paper I ph is considered to be constant for any given irradiance. Therefore, the model described in equation 1.0, is used for the figures described in the different MPPT methods. 0.008 0.006 0.004 0.002 0 0 0.1 0.2 0.3 0.4 0.5 0.6 -0.002 V(V) Figure 1: P-V curve of a simulated PV cell with varying light intensity 0.7 5. Fractional Short Circuit Current [3]: The Fractional Short Circuit Current (Isc) method, often referred to as the constant current method, uses the proportionality of the short circuit current to the MPP current (Imp) to find the MPP. By sampling the short circuit current the MPP can be found instantaneously. This allows for an extremely fast response, achieving the MPPT in one sample, but during the sample, no power is generated. To achieve high efficiency the Isc sample must be acquired quickly and the duty ratio between the sample time and period must be vary low. Temperature changes do not have a large affect on the ratios of Isc and Imp. Figure 2 shows the linear nature of Isc and Imp, as well as the relationship between temperature and slope. With an 80°C change in temperature, there is a 1.65% change in slope, and can be neglected. 6. Fractional Open Circuit Voltage [3]: The Fractional Open Circuit Voltage (Voc) Method for MPPT, also known as the constant voltage method, uses the same technique as the Fractional Isc method, except it monitors Voc. This method has the same benefits and challenges as the Fractional Isc method. Using the Fractional Voc method an 80°C change in temperature results in a 1.085% change in slope however the change in temperature also results in a 1.96% change in offset not present in the fractional Isc method. These temperature dependencies only result in slightly lower efficiencies and in most cases can be neglected. Figure 3 shows the linear relationship between Voc and Vmp. 0.7 0.65 T = 300, Slope = 0.9512 0.6 0.55 Vmp(V) 4. Power-Feedback Control [1]: Power feedback control tracks the MPP by feeding back the change in power, forcing it to zero. This can be seen in figure 1, where the MPP is at the point to zero slope. The controller increases the voltage when the slope positive, decreases the voltage if the slope is negative, and stabilizes at the MPP. The power feedback control method can achieve high efficiency in a wide range of operating points, and has a fast response to changing conditions T = 260, Slope = 0.9439 0.5 0.45 0.04 T = 320, Slope = 0.9542 0.4 0.035 T = 300, Slope = 0.9338 0.03 0.3 0.25 0.025 Imp(A) 0.35 T = 260, Slope = 0.9375 0.02 0.015 0.35 0.45 0.55 Voc(V) Figure 3: A graph of the linear relationship between open circuit voltage, and MPP voltage. T = 320, Slope = 0.9532 0.01 0.005 0 0 0.01 0.02 0.03 0.04 Isc(A) Figure 2: A graph of the linear relationship between Short circuit current, and MPP current. 7. Computational/ Lookup table: Computational and Lookup Table methods use the same basic technique to find the MPP. In an environment where irradiance is the only changing condition any measured voltage and current correspond to a single MPP. Figure 4 shows I-V curves of a PV cell in varying light intensities. The intersecting curve shows the MPP for all light intensities. 0.045 0.04 0.035 0.03 I(A) 0.025 can be biased at the MPP. The cell bias voltage will remain constant until the next sweep, regardless of changing conditions. A sweep generally takes 50ms during which, the cell is not at the MPP. An optimal period is entirely dependent on how fast conditions change. 0.02 0.015 0.01 0.005 0 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 -0.005 V(V) Figure 4: I-V curve of a simulated PV cell in varying light intensity. The Computational MPPT uses an equation to find the MPP. Similarly, the Lookup Table MPPT method uses a preset table to determine the MPP. These methods lead to very fast responses and do not require any forced biasing to find the MPP. These methods can predict the MPP for any number of conditions, however with each additional condition, the number of sensors increases proportionally, and the number of calculated values increases exponentially. For example a lookup table for varying light requires a 2-D array for each possible voltage and current. Adding the ability to compensate for temperature makes the array 3 dimensions, and adding age requires 4 dimensions. This significantly limits the practicality of using such a method. The Computational method does not have as big of a problem with the Lookup Table method with multi-variables, the equation just gets more complex. 9. Fuzzy logic: Fuzzy logic MPPT method uses a number of conditional statements, to decide whether a small, large or no step is needed. The fuzzy logic method is similar to the hill climbing method of perturbation, but uses more complex method for determining step sizes and direction. In a fuzzy logic system the step size and direction depends on how much error and change in error is measured. Equations 2.1 and 2.2 show how the error and change in error is determined. Pph k Pph k 1 E k (2.1) i ph k i ph k 1 (2.2) CEk Ek Ek 1 Fuzzy logic uses the error and change in error in condition statements, called rules, to determine the next perturbation size and direction. A set of these rules is shown in table 3 where N is negative, P is positive, B is big, S is small, and Z0 is zero. Each square can be interpreted as a conditional statement like shown in the following statement. IF(E is PB) AND (CE is Z0) THEN (dD is PB) From table 3 the size and direction of the change in duty cycle can be determined Table 3: 8. Current Sweep: The current sweep method for MPPT performs a periodic sweep of the PV cell’s bias current. By measuring the current and voltage during the sweep, the MPP can be determined and the cells E\CE NB NS Z0 PS PB Fuzzy logic rule table NB NS Z0 PS Z0 Z0 NB NB Z0 Z0 NS NS NS Z0 Z0 Z0 PS PS PS Z0 PB PB PB Z0 PB NB NS PS Z0 Z0 Table 4 describes a set of definitions that can be used in a fuzzy logic MPPT. There are methods for optimizing the values for NB, NS, PS, and PB; however the fuzzy logic MPPT method is robust enough to operate with poor choices of definitions. logic definition table Definition E CE Negative big -0.04 -80 Negative small -0.02 -40 Zero 0 0 Positive small 0.02 40 Positive big 0.04 80 Table 4: Fuzzy NB NS Z0 PS PB dD -0.04 -0.02 0 0.02 0.04 Defuzzification is the method for determining a value of change in duty cycle (dD) from the results of the rule set. dD can be pre-selected for the simplest control or implemented by more complex methods of defuzzification. Some of these methods include min-max, max-product, average, and root-sum-squared (RSS), and their effectiveness varies with each situation. 10. Array Reconfiguration: Array reconfiguration is one of the only ways to achieve the maximum output power of a photovoltaic array when an array is partially shaded, partially damaged, or has hot spots. Array configuration does not have a method for MPPT by itself; it is only able to find the optimal arrangement of cells. Parallel PV cells’ current is limited by the cell with the lowest current, and series PV cells’ voltage is limited by the cell with the lowest voltage. When some cells are shaded, they can force the MPP measured to be less than the maximum power available. Array reconfiguration arranges the array in a pattern to minimize efficient cells and allows the maximum power to become available. Figure 5: Diagram of all possible combinations of array reconfiguration The entire Array Reconfiguring system can be incredibly complex, with much more over head than a traditional MPPT. Figure 5 shows an array of nine cells with all 48 of the possible junctions and the hundreds of possible combinations. Complexity can be reduced by removing some possible combinations, but this increases the chance for less efficient configurations. The array reconfiguring method does not track the MPP of the system itself. A separate MPPT must be used to find the MPP of the total reconfigured systems output. The array reconfiguration method is only practical for large arrays where there would be slow moving clouds or in situations where arrays face different directions, like in some satellites. Other MPPT: There are many MPPT methods that are not described in this paper. Most of these techniques are theoretical, impractical under most conditions, or not widely used. A few of these MPPT methods are Fibonacci, neural network, temperature compensation using diodes thermal characteristics, DC link capacitive droop, parasitic capacitance, dither signal injection, test cell used as a reference for the array, and ripple correlation control. Some of these MPPT methods work better under certain conditions, but most are not yet practical. methods use common techniques such as system perturbation or predictive tracking. Table 5 shows a summary of the MPPT methods discussed in this paper, and compares their speed, methods, operating conditions, and attributes. Conclusion: A variety of MPPT methods were described in this paper all using different techniques for MPPT. All methods have benefits and detriments, and the practicality of each method is highly dependent on the PV array size, type of changing conditions and rate at which they change. Many of the Table 5: Comparison of MPPT methods P&O Hill Climb Inc Conduct Power Feedback Computational Lookup Table Fuzzy Logic Array Reconfiguration Fractional Voc Fractional Isc Current Sweep Basic Relative Speed Speed slow slow fast 1 step/period 1 step/period 1step/period Very fast Very fast med Slow # Modules/period + MPPT 1 large step/period Speed Very Fast Very Fast full range/period full range/period Steady state error Accuracy of calculation and ADC slow MPP/period MPP/period MPP/period 1/2 Δ Table Values small step size NA ADC ADC ADC NA Set Set Set Set Varies Varies Varies step size step size Step Set/Varies set set # of step sizes 1 1 1 NA NA NA 2 NA min step 1 1 1 NA NA NA 0 NA NA NA NA max step 1 1 1 NA NA NA 1 large step NA Full Range Full Range Full Range I,V I,V I,V ΔP I,V I,V P,I P for each Module Voc Isc d d I/V, d P/d V d Imp,Vmp Imp,Vmp E,ΔE Arrays circuit layout Vmp Imp Imp,Vmp Oscillations at MPP, delay in reaching MPP Oscillations at MPP, delay in reaching MPP delay in reaching MPP Steady state error Error in predicted curves Error in predicted curves delay in reaching MPP Time required for array reconfiguration Error in predetermined slope Error in predetermined slope losses during sweep, error in estimation between sweeps Accuracy Limiter Sensed Points Calculated unit Losses ADC fast bandwidth of converter NA NA NA I,V Details True MPPT? yes yes yes yes no yes no yes no Analog/Digital digital digital digital ether digital digital Digital digital Digital Digital digital MPU needed? no no Usually no yes Usually Usually yes Usually Usually yes simple simple simple small large large Varies Very large small small varies both both both both large large Varies Large Both Both both ΔTemperature yes yes yes yes not generally) not generally) yes not by its self yes yes depends ΔLight yes yes yes yes yes yes yes not by its self yes yes yes yes Relative Complexity Practical for Small/Large Arrays no yes Robustness: Quick Δ Conditions no no no yes yes yes somewhat no yes yes Age yes yes yes yes no no yes not by its self no no ΔCells or array yes yes yes yes no no yes yes no no yes Partial Shading not fully not fully not fully not fully not fully not fully not fully yes not fully not fully not fully [1] Shen, Ch; Hua, Ch; “Study of Maximum power Tracking Techniques and Control of DC/DC Converters for Photovoltaic Power Systems”, Dept of Electrical engineering National Yunlin University of Science & Technology IEEE 0-7803-4489-8, pp86~93, 1998. [2]http://ieeexplore.ieee.org/iel5/1115/80 58/00349703.pdf?arnumber=349703 [3]http://power.ece.uiuc.edu/ieee/.%5Cp resentations%5CF2PE2W2VAIVXUPJ8 F2PMU6C10.pdf yes [4]http://ece.colorado.edu/~bart/book/bo ok/ [5]http://students.sabanciuniv.edu/~erha ndemirok/class.html [6] http://www.cs.cofc.edu/~manaris/aieducation-repository/fuzzy-tutorial.html
© Copyright 2026 Paperzz