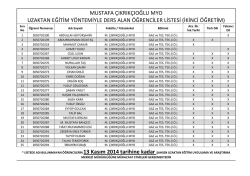
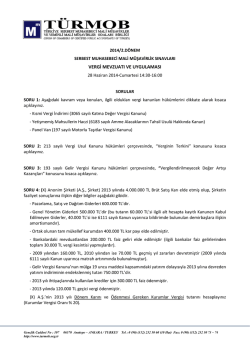
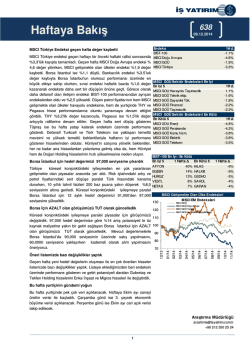
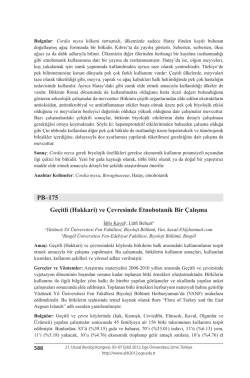
OTEKON’14 7. Otomotiv Teknolojileri Kongresi 26-27 Mayıs 2014, BURSA GERÇEK ZAMANLI HİBRİD ELEKTRİKLİ TAŞIT TASARIMI VE SİMÜLASYONU Hakan Suvak*, Kemal Erşan** * Karabük Üniversitesi Meslek Yüksekokulu., Karabük Gazi Üniversitesi Teknoloji Fakültesi Otomotiv Mühendisliği., Ankara ** ÖZET Bu çalışmada 21.yy da yaygın olarak kullanılması düşünülen elektrikli bir taşıt için tasarım ve simülasyon programının yapılması amaçlanmıştır. Çalışmada seri hibrid elektrikli bir taşıt için DC motor ve batarya grubu matlab/simulink ortamında simüle edilmiştir. Ayrıca taşıtı harekete zorlayan ve taşıtın hareketine engel olan direnç kuvvetleri de hesap edilerek bir .m file dosyası yazılmıştır. UDDS (Urban Dynamometer Driving Schedule) şehir çevrimine göre zamana bağlı olarak taşıtın ihtiyaç duyduğu anlık güç ihtiyacı yazılan .m file dosyasına atılmış ve simülasyon yapılmıştır. Anahtar kelimeler: Hibrid taşıt, simülasyon, simulink ABSTRACT In this study, it is aimed to to design an electric vehicle, which can be used widely in 21st century, and to develop a simulation software. DC motor and battery pack for a serial hybrid electric vehicle was simulated in matlab/simulink. Besides, driving force and resisting forces were calculated and printed as a .m file. Instantaneous force demand of the vehicle according to UDDS (Urban Dynamometer Driving Schedule) was recorded into the .m file and the simulation was done. Keywords: Hybrid vehicle, simulation, simulink varmışlardır. Günümüz taşıtlarının az yakıt sarfiyatlı ve çevreci olması, taşıt tercihinde en önemli sebepler arasındadır. Bu tercihi karşılayacak yeni bir enerji çeşidi ve bu enerji ile çalışan bir taşıta ihtiyaç vardır. Elektrik enerjisi kullanarak yeni bir taşıtın tasarımı bu tercihe cevap vereceği düşünülmektedir. Elektrik enerjisinin otomotiv sektöründe kullanılmasının ilk aşaması elektrikli taşıtın tasarım ve simülasyonundan oluşmaktadır. Simülasyon programları bir sistemin uygulama yapılmadan tasarımın kısa zamanda yapılmasını ve uygulamada kullanılabilirliğini kolaylaştırmaktadır. Uygulamada harcanacak enerji, maliyet ve zamandan tasarruf sağlamaktadır. 1. GİRİŞ Günümüzde yeraltı enerji kaynaklarının zamanla tükenmeye başlaması ve global enerji problemlerinin artması, insanoğlunu çeşitli enerji sistemlerine ve kaynaklarına sevk etmeye başlamıştır. Yenilenebilir enerji kaynakları yeni bulunan teknolojiler ile gelişmeye başlamıştır. Bu enerji kaynaklarının önemli olmasının nedeni bir kısmının sadece insan kaynaklı olmasıdır. Yenilenebilir enerji kaynaklarından rüzgar, güneş, hidrolik enerji gibi sistemler sadece doğaya bağlıdır. Rüzgar, güneş, su gibi kaynakların bölgelere göre değişmesi kaynaklardan alınacak olan enerjileri çok etkilemektedir. Günümüzde klasik taşıtlar CO, CO 2 , NO x ve HC gazları ile çevre kirliliğine sebep olmakta ve bu gazlar insan yaşamını olumsuz yönde etkilemektedir. Günümüz taşıt kullanıcıları ve hükümetler mevcut enerji kaynaklarının beklentileri karşılayamadığı kanaatine 2. ELEKTRİKLİ ARAÇLAR Günümüzde kullanılan elektrik kaynaklı araç sistemleri çeşitli yapılarda karşımıza çıkmaktadır. Bu yapılar tümü 1 elektrikli araçlar (tamamıyla elektrikli), hibrid elektrikli araçlar (melez) ve yakıt pilli elektrikli araçlar olmak üzere üç guruba ayrılır. Hibrid elektrikli araçlarla yakıt pilli araçlarda verim içten yanmalı motorlara göre daha yüksek ve emisyon çok düşüktür. Bu da elektrikli taşıtların kullanımını gelecekte ön plana çıkarmaktadır. Elektrikli araçlarda kullanılan akümülatörlerin ağır, hantal olması, kapasitelerinin sınırlı ve dolum süresinin uzun olması, elektrik motorlarının da güç/ağırlık ve güç/hacim oranlarının çok iyi olmaması ve menzillerinin kısa olması gibi nedenlerle kısa mesafelerde ve hafif yüklerde kullanılabilir. Diğer bir elektrikli taşıt türü ise yakıt pilli elektrikli taşıtlardır. Yakıt pili teknolojisinin araçlarda uygulanması, elektrikli araçlarda son aşama olup, gelecekte birincil enerji kaynaklarının fosil yakıtlardan alternatif yakıtlara doğru değişimi ile hızlanacaktır. Mevcut taşıt üretim altyapısı, servis ağı, yakıt pili seri üretim alt yapısı, yakıtın üretim ve depolanmasının yaygınlaştırılması gibi problemler yakıt pilli elektrikli taşıtların kullanımını geciktirmektedir. Elektrikli taşıtların, klasik taşıtlara göre daha yüksek verime ve düşük emisyona sahip olmaları sebebiyle tercih edilmektedir. Buna mukabil elektrik kaynağı olarak bataryaların kullanılması taşıt menzilini sınırlamaktadır [1]. Şekil 1. Seri hibrit sistem 2.1.2 Paralel Hibrid Elektrikli Taşıtlar Bu konfigürasyona sahip taşıtlarda, tekerleklerin tahriki çeşitli millerle birbirleriyle irtibatlandırılmış İYM ve elektrik motorundan sağlanmaktadır. Paralel hibrid konfigürasyonunu günümüzde Honda Insight ve Honda Civic modellerinde görmek mümkündür. Sistemde kontrolör kullanılmasının amacı hangi kaynaktan ne kadar güç çekileceğinin belirlenmesidir. 2.1 Hibrid Elektrikli Taşıtlar HEA’lar birden fazla güç kaynağına sahip araçlar olarak da adlandırılır. Temel olarak hibrid taşıtlar yakıt ile güç üreten bir güç kaynağı ve elektrik enerjisi depolayan bir depolama elemanı ile elektrik motorundan oluşmuştur. Tümü-elektrikli araçlara içten yanmalı motor(İYM) eklenerek aracın menzili ve gücünün arttırılması sağlanmıştır. HEA’lar, klasik araca nazaran kirletici emisyonları azaltmakta ve yakıt ekonomisini arttırmaktadır[2]. Tahrik Sistemlerine Göre Hibrid Elektrikli Araçlar; seri hibrid, paralel hibrid ve karma hibrid elektrikli taşıtlar olmak üzere üç gruba ayrılırlar. 2.1.1 Seri Hibrid Elektrikli Taşıtlar Seri sistemde, taşıtı harekete geçiren tahrik kuvveti elektrik motoru tarafından karşılanmaktadır. Seri sistemde içten yanmalı motor jeneratörü çalıştırarak elektrik enerjisi üretmektedir. Elektrik motorunun tahrik için kullanacağı güç elektrik enerjisini depolama aygıtlarından (bataryadan), yakıt pillinden yada güneş panelinden temin edilmektedir. Bu kaynakların yetersizliği durumunda ise sistem için gereken enerji hibrid güç ünitesini oluşturan içten yanmalı motor ve jeneratörden oluşmaktadır. Jeneratörü tahrik etmek için içten yanmalı motor, gaz türbini, stirling motoru vs. gibi elemanlarda kullanılabilir. Güneş enerji destekli hibrit taşıt tasarlanması durumunda basitliğinden dolayı seri hibrit sistem tercih edilebilir[8],[9]. Şekil 2. Paralel hibrit sistem 2.1.3 Karma Hibrid (Seri/Paralel) Elektrikli Taşıtlar Bu konfigürasyon daha çok paralel sisteme benzemektedir. Burada İYM direkt olarak tekerleklere bağlıdır. Tasarımın özelliği İYM’nin transmisyon ile bağlı olmayıp seri tahrik sisteminde olduğu gibi generatör ile bağlı olmasıdır. Düşük hızlarda araç seri hibrid sistemde olduğu gibi çalışmaktadır. Yüksek hızlarda ise İYM devreye girerek tekerleklere güç verir ve seri tahrikteki gereksiz enerji dönüşümleri ile kaybedilen enerji en düşük seviyeye indirilir. Toyota Prius’da bu sistem kullanılmıştır. Burada amaç hem paralel hem de seri sistemin avantajlarını kullanarak İYM’nin en verimli noktada çalışmasını sağlamaktır [1]. 2 F yo = (3) m*g*sin(ψ) F yo : Yokuş Direnç Kuvveti, ψ: yol eğimi F iv = (4) m*a F iv : İvmelenme Direnç Kuvveti, a: taşıtın ivmesi(m/s2) = F tr (5) Şekil 3. Karma (Seri/Paralel) hibrit sistem I(G2/η t r2)a Kuvveti, I: Atalet F tr : Transmisyon Direnç ηt: Transmisyon oranı, G/r: momenti(kgm2), Transmisyon sabiti 3. HİBRİD TAŞIT TASARIMI Taşıt tasarımı yaparken dikkate alınacak en önemli yasa Newton'un ikinci yasasıdır. Bu yasaya göre bir cisim üzerine uygulanan net kuvvet ile ivme arasında doğru orantı vardır. Cisme uygulanan net kuvvet 0’dan farklı ise cisim ivme kazanır. Cisme etki eden net kuvvet toplam kuvvetlerin bileşkesine eşittir. Bir taşıtı harekete zorlayan kuvvetler ve taşıtın hareketine engel direnç kuvvetleri olarak bir taşıta birden fazla direnç kuvveti etki etmektedir. Newton'un ikinci yasası gereği taşıtın hareketi için gereken kuvvet taşıta etki eden direnç kuvvetlerinin bileşkesi ile elde edilir. Taşıtın hareketine engel direnç kuvvetlerini, yuvarlanma direnci (F yu ), yokuş direnci (F yo ), hava direnci(F ha ), ivme direnci(F iv ) olarak sıralayabiliriz. Şekil 4'te bir taşıta uygulanan kuvvetler görülmektedir. 𝐆𝟐 F wa= 𝐈 ∗ 𝛈∗𝐫𝟐 ∗ 𝐚 (6) F wa : Açısal ivme kuvveti, I: Elektrik motor rotorunun atalet momenti (kgm2), G: Çap değişiminden dolayı hız oranı, r: Tekerlek yarıçapı (m), η: Verim (%) Taşıtın hareket edebilmesi için direnç kuvvetlerini yenecek bir tahrik kuvvetine ihtiyaç vardır. Toplam direnç kuvvetleri F te ise (1), (2), (3), (4) denklemlerinin toplanması ile elde edilir[3]. Tahrik kuvveti taşıtın lastikleri ile yol arasındaki yola paralel kuvvettir ve bu kuvvet HEV taşıtlarda elektrik motoru ve IC motor ile birlikte yol yükünü yenmektedir. F te = F yu +F ha +F yo +F iv +F wa dir. (6) F te : Toplam direnç kuvveti (N) Tahrik kuvvetlerini yenmek için gerekli güç ifadesi; P te = F te *V V: Taşıtın hızı(m/s) Şekil 4. Taşıta etkiyen direnç kuvvetleri F yu = µ rr *mg (1) 4. TAŞIT TASARLARKEN KULLANILAN SİMÜLASYON PROGRAMLARI Hibrit ve elektrikli taşıtların tasarımı diğer konvansiyonel araçlara göre daha kompleks ve zordur. Araç tasarlanmadan önce hem maliyet hem de zamandan tasarrufun sağlanması tasarımcılar için vazgeçilmez kurallar olmalıdır. Bu amaçla simülasyon programları otomotiv tasarımcılarına önemli kolaylıklar sunmaktadır. Ayrıca simülasyon programlarında farklı sistemler F yu : Yuvarlanma Direnç Kuvveti, µ rr: Yuvarlanma direnç katsayısı , m: taşıt kütlesi(kg), g: Yerçekimi ivmesi(m/s2) F ha = ½(ρ*A*C d *V2) (7) (2) F ha: Hava Direnç Kuvveti, ρ: Hava Yoğunluğu (kg/m3), A: Yüzey Alanı (m2), C d : Aero dinamik direnç katsayısı 3 kullanan araçların yakıt tüketimi, emisyonları, ve diğer özellikleri de mukayese edilebilmektedir. Literatürde en çok kullanılan simülasyon programları; Advisor, Simplev, Carsim, Hvec, CsmHev, V-Elph, Advance, Vtb yazılımlarıdır[4]. Bu yazılımların çoğu matlab tabanlıdır. Ayrıca matlab/simulink yazılımı kullanarak da yeni bir program elde etmek mümkündür. 5. YAPILAN ÇALIŞMA Bu çalışmada elektrikli taşıtlarla ilgili yeni gelişmeler takip edilerek çalışma tamamlanmıştır. Literatür araştırmasında simülasyon programının yapılabilmesi için farklı elektrikli taşıt teknolojileri ve elektrikli taşıtın çalıştırılması için gerekli olan elektrik motoru, enerjiyi depolama biçimi ve güç iletim teknikleri araştırılmıştır. Çalışmada güneş enerji destekli seri hibrit bir elektrikli taşıtın matlab/simulink ortamında modellenmesi ele alınmıştır. Modelde seri hibrit konfigürasyon tercih edilmesinin nedeni olarak ileri zamanlarda yapılacak başka bir çalışmada jeneratör yerine yakıt pili, ultrakapasitör gibi enerji parametrelerinin kullanılacağı ihtimalidir. Model tasarlanırken taşıta ait bazı parametreler çizelge 1'de verilmiştir[1]. Çizelge 2. UDDS sürüş çevriminin özellikleri[7] Modelde, DC motora yük m file ortamında yazılan data dosyasından alınarak verilmiştir. Bu yük bloğunda hız zaman grafiği bilinen herhangi bir taşıt içinde hesaplamalar yapılabilir. Şekil 5'de m file dosyası görülmektedir. Çizelge 1. Tasarımı yapılan taşıtın teknik özellikleri Modelde kullanılan batarya ve dc motor bileşenleri matlab/simulink kütüphanesinden hazır olarak alınmıştır. Fotovoltaik panel (PV) ise National Renewable Energy Laboratory (NREL) tarafından modellenmiş ve literatürden alınmıştır[5]. Literatürden alınan bu PV modeli kendi modelimize uyarlanmak üzere tekrardan düzenlenmiştir. Güneş panelleri birbirine seri bağlanarak gerilim artırılması sağlanmıştır. Ayrıca simülasyonu yapılan taşıtın teknik değerlerinden ve denklem (1), (2), (3), (4) (5), (6) ve (7) denklemlerinin faydalanılarak matlab ortamında bir m file dosyası yazılmıştır. Yazılan bu m file dosyası ile taşıtın hareketi esnasında ihtiyaç duyduğu güç ve tork değerleri anlık olarak hesaplanmıştır. Seçilen şehir çevriminin değerleri dikkate alınarak simülasyon zamanı 1369 saniye alınmıştır. Taşıtın hareketi için literatürde sıkça kullanılan Urban Dynamometer Driving Schedule (UDDS) şehir çevrimi kullanılmıştır[6]. UDDS şehir çevrimine ait değerler çizelge 2'de verilmiştir. Şekil 5 Taşıt için yazılan m file dosyası M file dosyasında gerekli hesaplamalar yapıldıktan sonra taşıtın şehir çevrimine göre anlık olarak ihtiyaç duyduğu güç-zaman, tork-zaman ve hız zaman grafikleri çizdirilmiş ve şekil 6'da gösterilmiştir. Grafiğe göre taşıtın tork değerleri normal değerler olup hız zaman ve güç zaman değerleri de birbirleriyle örtüşmektedirler. 4 Güç zaman grafiği 4 Güç(Watt) 3 x 10 2 1 0 0 200 400 600 800 zaman(s) Hız zaman grafiği 1000 1200 1400 0 200 400 600 800 zaman(s) Tork zaman grafiği 1000 1200 1400 0 200 400 600 1000 1200 1400 Hız(m/s) 30 20 10 0 Tork(N*m) 180 175 170 800 zaman(s) Şekil 6. Taşıt ait simülasyon sonuçları Matlab/Simulink ortamında kurulan model çalıştırılarak PV nin etkinliği gözlemlenmiştir. Şekil 7'de oluşturulan modelin blok diyagramı görülmektedir. Şekil 8. Simülasyon sonuçları Taşıtın, çalışmada kullanılan şehir çevrimi UDDS'e göre ihtiyaç duyduğu anlık olarak güç miktarı şekil 9'da verilmektedir. Şekil 7. Hibrit sistemin blok diyagramı 6. SONUÇLAR Kurulan model ve yazılan m file dosyası ile istenilen herhangi bir taşıtın teknik verilerini girerek simülasyon elde etmek mümkündür. Ayrıca istenilen herhangi bir taşıta bağlanacak sensör vs cihazlarla taşıtın hız zaman grafiği çıkartılabilir. Hız zaman grafiği yardımıyla taşıtın anlık olarak simülasyonu da yapılabilir. Şekil 8'de simülasyon sonuçları görülmektedir. Batarya gerilimi PV panel gerilimine sabitlenmiştir. Batarya şarj seviyesi (SOC) yüzde değer olarak ifade edilmektedir. Grafiğe göre elektrik motorunun çektiği akım motor hızıyla benzeşim göstermektedir. Şekil 9. UDDS çevrimine göre taşıtın anlık olarak yük talebi 5 7. SONUÇ Bu çalışmada güneş enerji destekli bir taşıt tasarlanmış ve güneş panelinin taşıta etkisi araştırılmıştır. Güneş panelinin etkisinin taşıtın hareketinde kayda değer bir enerji artışı meydana getirmediği görülmüştür. Güneş panelinin verimlerinin düşük olması nedeniyle taşıt tahrikine istenen düzeyde enerji sağlayamayabilir ancak taşıtta bataryadan beslenen diğer donanımsal ekipmanların çalıştırılmasında veya klima gibi motordan hareket alarak çalışan ekipmanların çalıştırılmasında kullanılabilir[10]. KAYNAKLAR 1. Ertaç Y,. 2008, "Elektrikli Taşıtların Tasarımı Ve Simülasyonu" Yüksek Lisans Tezi, Gazi Üniversitesi, Fen Bilimleri Enstitüsü, Ankara. 2. Karahan Ş,. 2003, "Hibrid Elektrikli Araçlar" Yüksek Lisans Tezi, Yıldız Teknik Üniversitesi, Fen Bilimleri Enstitüsü, İstanbul. 3. Larminie J,. Lowry J,. “Electic Vehicle Technology Explained”, Sons Ltd, The Atrium, Southern Gate, Chichester, England, 55,64142,195-266 (2003) 4. Ünlü, N. Karahan, Ş. Tür, O. Uçarol, H. Özsu, E. Yazar, A., “Elektrikli Araçlar”, TÜBİTAKMarmara Araştırma Merkezi Enerji Sistemleri ve Çevre Araştırma Enstitüsü, Gebze-Kocaeli 5. http://ecee.colorado.edu/~ecen2060/matlab.html 6. http://www.epa.gov/nvfel/methods/uddscol.txt 7. Erdiç O,. 2008 "Dalgacık Dönüşümü/Bulanık Mantık Tabanlı Enerji Yönetim Stratejisi Kullanılarak Yakıt Hücresi/Ultra-Kapasitörlü Hibrit Taşıt Sisteminin Modellenmesi Ve Analizi" Yüksek Lisans Tezi, Yıldız Teknik Üniversitesi, Fen Bilimleri Enstitüsü, İstanbul. 8. S Letendre, R Perez, C Herig, Vehicle Integrated PV: aClean and Secure Fuel for Hybrid Electric Vehicles. Annual Meeting of the American Solar Energy Society, Austin, TX, June 21-26, 2003. 9. Bin Wu, Chan-Chiao Lin, Zoran Filipi, Huei Peng, Dennis Assanis, Optimal Power Management of a Hydraulic Hybrid Delivery Truck. Vehicle System Dynamics 2004, Vol. 42, Nos. 1–2, pp. 23–40, 2004. 10. G Rizzo, I Arsie and M Sorrentino.,'Hybrid Solar Vehicles' Solar Collectors and Panels, Theory and Applications. Panel teknolojisinin ilerlemesiyle panel verimlerinin her geçen gün artırıldığı ve daha fazla yüzey alanı için transparent(şeffaf) panellerin yaygınlaşmasıyla ileride vazgeçilmez teknoloji olacağı da aşikârdır. Özellikle Amerika ve Avrupa ülkelerinin güneş paneline olan ilgileri ve bu teknolojiye olan yatırımları panel teknolojisinin çok kısa zamanda daha ileriye gideceğinin açık kanıtıdır. Ülkemiz Avrupa ülkelerinin birçoğundan daha fazla güneş enerji potansiyeline sahiptir. Bu potansiyel göz önüne alındığında, panel teknolojisi ile ilgili olan akademik çalışmalar ışığında yapılacak destek ve projelere ülkemizin ihtiyacının önemli düzeyde olduğu anlaşılmaktadır. 6 7
© Copyright 2026 Paperzz