TEMEL TANECİKLER
DERS NOTLARI
PROF. DR. GEDİZ AKDENİZ
BÖLÜM II
II.6 HADRONLAR VE ÖZELLİKLERİ
Kuvvetli etkileşimleri hadronlar yapar. Hadronlar; 1)Baryonlar (yarım spinli; Bose-Einstein
istatistiğine uyarlar.) 2)Mezonlar (tam spinli; Fermi-Dirac istatistiğine uyarlar.) Şimdi bazı
mezonların ve baryonların özelliklerini tablolar halinde gözden geçirelim.
MESONLAR:
S(strange quark)
I3
Quark yapısı
(Pion) π − ,π 0,π +
-1,0,+1
0
ud , du ,
(Müon) µ
0
0
u u
uu − d d
2
+ d d
− 2 ss
6
(Kaon) K
0
, K
+
K −, K 0
-1/2,+1/2
1
ds,us
-1/2,+1/2
-1
su , sd
Bütün mesonların spini 0 dır. (S=0)
I3
BARYONLAR
S(strange quark)
Quark yapısı
P,n
½ -1/2
0
uud, udd
Σ− , Σ0 , Σ+
-1,0,+1
-1
uud, udd
Λ
0
-1
uud, udd
Ξ− , Ξ0
-1/2,1/2
-2
uud, udd
∆− , ∆0 , ∆+ , ∆+ +
-3/2,-1/2,1/2,3/2
0
sss
Σ *− , Σ *0 , Σ *+
-1,0,1
-1
sss
Ξ * , Ξ *0
-1/2,1/2
-2
sss
Ω−
0
-3
sss
−
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm II.6 1.sayfa
BÖLÜM II
II.7 ETKİLEŞME ÖRNEKLERİ
Bu reaksiyonları incelerken ve etkileşme tiplerini belirlerken takip edilecek sıra şöyle
olmalıdır. Önce yük korunumuna, Baryon sayısına korunumuna, acaiplik korunumuna ve
sonra Le , Lµ , Lτ lepton korunumuna bakılır. Bunların yanısıra reaksiyonun gerçekleşmesi için
reaksiyonda momentum-enerji korunumunun olması unutulmamalıdır.
Örnekler geçmeden önce korunan birimleri etkileşmelere göre gözden geçirelim.
Korunan Birim
Kuvvetli Etkileşme
Elektrik yükü (Q)
Baryon Sayısı (B)
Acayiplik Sayısı (S)
İzospin ( I 3 )
Hyperyük (Y=S+B)
Enerji
Momentum Korunumu
Açısal mom.
EMT
Zayıf Etkileşme
E
E
E
E
E
E
E
E
H
E
E
E
H
H
H
E
E
E
ÖRNEK-1.
Σ0 → Λ + Π 0
reaksiyonunu Standart model çerçevesinde inceleyiniz.
Yük korunumu (Q): 0 à 0 + 0
(B)aryon
:1 à 1+0
( I 3 )İzospin
:0 à 0+0
(S)trangeness
: -1 à -1 + 0
Y
:0 à 0+0
Olduğundan bu reaksiyon kuvetli etkileşmedir.
Not: Sadece I 3 korunmazsa, elektromanyetik (EM) etkileşimdir.Yük ve Baryon sayısı
mutlaka korunacak (giren quark kadar çıkan quark var). Yani Q ve B sayısı mutlaka
korunacak.Sadece ikisi yanında, I 3 , S ve Y korunmuyorsa zayıf etkileşmedir.
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm II.7 1.sayfa
ÖRNEK-2.
Σ − → n + Π − reaksiyonunu Standart model çerçevesinde inceleyiniz.
Q : -1à0+(-1)
B : 1à1+0
I 3 : -1à-1/2 –1
S : -1à0 + 0
Korunmuyor.
Korunmuyor.
Zayıf etkileşme.
ÖRNEK-3.
µ → e− +νe
Q
reaksiyonunu Standart model çerçevesinde inceleyiniz.
:-1à-1+0
Le : 0à 1 –1
Lµ :1à 0 + 0
Korunmuyor.
Böyle bir reaksiyon hiçbir zaman gözlenmez. Müon nötrinosuna bağlı bir parçacık daha
olmalı ki reaksiyon gerçekleşsin.
ÖRNEK-4.
∆+ → p + π 0
Q
B
I3
S
reaksiyonunu Standart model çerçevesinde inceleyiniz.
:1 à 1+0
:1 à 1+0
:1/2à1/2 + 0
:0 à 0 + 0
Kuvetli etkileşmedir.
ÖRNEK-5.
νe + p → n + e+
reaksiyonunu Standart model çerçevesinde inceleyiniz.
Q : 0 +1 à 0 + 1
B : 0 +1 à 1 + 0
I 3 : 0 + ½à-1/2 + 0
S :0+ 0à0+0
Le :-1 + 0 à 0 – 1
lepton (ν e )olduğu için baryonu 0. I 3 korunmadığı için EM etkileşmedir.
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm II.7 2.sayfa
ÖRNEK-6.
e − + p → νe + π 0
reaksiyonunu Standart model çerçevesinde inceleyiniz.
Q : -1 + 1 à 0 + 0
B : 0 +1 à 0 + 0
Böyle bir reaksiyon olmaz.
ÖRNEK-7.
p + p → Σ+ + n + K 0 + π + + π 0
reaksiyonunu Standart model çerçevesinde inceleyiniz.
Q : 1+1 à 1 + 0 + 0 + 1 + 0
B : 1+1 à 1 + 1 + 0 + 0 + 0
I 3 : ½+1/2à1 - 1/2 - 1/2 + 1 + 0
S :0+0 à -1 + 0 + 1 + 0 + 0
Kuvvetli etkileşme.
ÖRNEK-8.
Λ → p + π − reaksiyonunu Standart Model çerçevesinde inceleyiniz.
Q : 0 à +1 – 1
B :1 à 1+0
I3: 0 à ½ - 1
S : -1 à 0 + 0
Zayıf etkileşme.
ÖRNEK-9.
p → e+ + γ
reaksiyonunu Standart Model çerçevesinde inceleyiniz.
Q :1 à 1 + 0
B :1 à 0 + 0
Etkileşme görülmez.
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm II.7 3.sayfa
SORU-1: Durgun haldeki bir pionun müona bozunması sırasında ortaya çıkan
müonun hızını hesap ediniz.
π − → µ − + υµ
şeklinde bozunur
π + → µ + + υµ
π
µ
υµ
Bozunmadan önce
Bozunmadan sonra
r
r
r
Pπ = Pµ + Pυ
π → µ + υµ
⇒
r
Pµ
r
= Pυ
(Durgun pion için Pπ = 0 )
Soruyu çözmeden önce dörtlü vektör tanımını kısaca hatırlayalım.
r
r
P = γmv =
r
mv
1−
v2
c2
P 0 = γmc
E = γmc =
2
mc 2
1−
Pµ = (
v2
c2
E
, Px , Py , Pz ) ⇒
c
Enerji-Momentum Dörtlü Vektörü
E2
Pµ P = 2 − P 2 = m 2 c 2
c
µ
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm II.7 4.sayfa
Pµ P µ = P0 P 0 − Pi P i
(
Pπ : Eπ , 0
)
(
)
(
)
Pµ : Eµ , Pµ
Pυ : Eυ , Pυ
Pπ2 = E 2 − P 2c 2 = mπ2 c 4
Pπ = Pµ + Pυ
Pγ = Pπ − Pµ
Pγ = Pπ + Pµ − 2 Pπ Pµ
2
2
2
mυ2 c 4 = mπ2 c 4 + m µ2 c 4 − 2 Pπ Pµ
0 = m π2 c 4 + m µ2 c 4 − 2 Pπ Pµ
mπ c4 + mµ c4 = 2Pπ Pµ
2
2
E Eµ
mπ2c4 + mµ2 c4 = 2 π
c c
2
2 4
durgun pion için Pπ = 0 ve dolayısıyla Eπ = mπ c
mπ2c2 + mµ2 c2 = 2mπ Eµ
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm II.7 5.sayfa
Eµ =
mπ2 + m µ2
2mπ
c2
Benzer şekilde;
Pµ = Pπ − Pυ
mµ2 c 4 = mπ2 c 4 + mυ2 c 4 − 2 Pπ Pυ
mπ2 c 2 − mµ2 c 2 = 2(mπ Eυ )
Eυ =
mπ2 − mµ2
2mπ
c2
r
{ Pπ
r
r
Eυ = Pυ c = Pµ c
Pµ =
r
= Pυ
}
Eυ
c
mπ − m µ
2
Pµ =
r
r
r
= Pµ + Pυ ⇒ Pµ
2mπ
2
c
Enerjisi ve momentumunu bildiğimiz müonun hızını hesap edebiliriz.
E = γmc 2
r
r
P = γmv
r
r
P γmv
=
E γmc 2
⇒
mπ − m µ
r
vµ =
c⇒
2
2
mπ + mµ
2
⇒
r
P 2
r
v =
c bağıntısından
E
2
v µ = 0.271c
bulunur.
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm II.7 6.sayfa
SORU 2:Duran bir protona bir proton çarparak en az bir tane proton yaratmak
için gerekli olan eşik enerjisi nedir?
p+ p→ p+ p+ p+ p
p
(baryon sayısı korunmalı)
p
Çarpışmadan önce
Çarpışmadan sonra
Labaratuvar sisteminde parçacıklar durgun halde bulunmadığından bu sistemde
çalışmak elverişli değildir.Bunun yerine momentum merkezi (CM) sisteminde
çalışmak uygundur.Oluşan dört parçacığın hepsi sistemde hareketsiz
kalmalı.Çünkü toplam momentum bu sistemde (CM) sıfır.
Önce
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm II.7 7.sayfa
Sonra
Lab.sisteminde toplam enerji-momentum dörtlü vektörü korunumlu olduğundan
çarpışma öncesi ya da sonrası değeri almam bir değişikliğe yol açmaz.Çarpışma
öncesi için toplam dörtlü vektörün değeri;
P
µ
top
E + mc 2 r
, P ,0,0
c
=[
]
Buradaki E ve P protonun enerjisi ve momentumu,m ise protonun
kütlesidir.Şimdi CM sisteminde dörtlü vektörü çarpışma sonrası için yazalım.
P3 + P4 + P5 + P6 = 0
P µ top = (4m p c,0,0,0)
'
P µ top ≠ P µ
′
′
′
′
E3 + E 4 + E5 + E6 = 4 m p c
'
Pµtop P
fakat
referans sisteminde invaryant)
(
E
+ mc
c
µ
'
= Pµ top P µ top (Dörtlü vektörün karesi her
'
top
)2 − p 2 = (4mc) 2
E 2 − P 2 c 2 = m2 c 4 ⇒ P 2 =
E 2 − m2 c 4
c2
denklemde yerine yazarsak
E2
E2
2 2
+
m
c
+
2
Em
−
+ m2c 2 = 16m2c2
2
2
c
c
2
E = 7mc
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm II.7 8.sayfa
SORU-3:Özdeş m kütleli ve T kinetik enerjili iki parçacığın kafa kafaya
çarpıştığını düşünelim. Parçacıkların göreli kinetik enerjisi ne olur?
(Kafa kafaya çarpışma)
(Sabit hedefli)
Yine benzer olarak toplam dörtlü vektörü CM sisteminde ve lab. sisteminde
yazalım.
P µ top = (
2E
,0
c
P µ top = (
E ' + mc 2 '
,P
c
'
)
)
(P ) = (P )
µ′ 2
top
µ 2
top
E '+ mc 2
2E
, p ′
=
c
c
2
2
2
2
4E 2 E '
′
mc
−
P
=
+
c
c2
2
4E 2 E '
= 2 + 2 E ′m + m 2 c 2 − p ′ 2
2
c
c
( E = T + mc 2 ve
E ′ = T ' + mc 2 )
2 E 2 = E ′mc 2 + m 2 c 4
(
2 T + mc 2
) = (T ′ + mc )mc
2
2
2
+ m 2c 4
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm II.7 9.sayfa
2T 2 + 4Tmc2 + 2m2c 4 = T ′mc2 + m2c 4 + m2 c 4
2T 2 + 4Tmc2 = T ′mc2
T′ =
2T 2 + 4Tmc2
mc
2
T
⇒ T ′ = 4T 1 +
2
2mc
SORU-4:v hızıyla hareket eden bir pion bir tane müon ve müon nötrinosuna
bozunmaktadır. Eğer nötrino pionun hareket yönüne göre 90° açıyla hareket
ediyorsa müonun hareket açısını bulunuz.(Soru c=1 kabul edilerek çözülmüştür.)
π − → µ − + υµ
µ
π
v
υ
Pπ = Pυ + Pµ
Pυ = Pπ − Pµ
Pµ = Pπ − Pυ
Pµ = Pπ − Pγ
mµ = mπ + mγ − 2 Pπ Pγ
2
2
2
mµ = mπ − 2 Pπ Pγ
2
2
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm II.7 10.sayfa
mµ − mπ = −2 Pπ Pυ
2
2
mµ − mπ = −2( Eπ Eυ − Pπ .Pυ )
2
(
2
r r
Pπ .Pυ = Pπ Pυ cos 90 = 0
)
mµ − mπ = −2 Eπ Eυ
2
2
Şekilden;
r
Pπ
r
= Pµ cos α
r
Pυ
r
= Pµ sin α
tan α =
Pυ
Pπ
r
Eυ = Pυ
⇒ Eυ = Pπ tan α
mπ − mµ = 2 Eπ Pπ tan α
2
2
mπ − m µ
2
tan α =
2
2 Eπ Pπ
mπ − m µ
tan α =
P
2 π Pπ
ν
2
mπ − m µ
2
2
2
tan α =
(β =
2γ 2 mπ v
2
(mπ − mµ )(1 − β 2 )
2
=
2
2
2mπ v
v
)
c
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm II.7 11.sayfa
II.8 PROBLEMLER
1- a ) Aşağıdaki tepkileşmelerin gerçekleşip gerçekleşmediğine bakınız ve eğer
gerçekleşiyorsa hangi tip etkileşme olduğunu belirleyiniz.
p + p → π0 + π0
µ- → e- + ν + ν
π - + p →Σ - + π+
b) Aşağıdaki etkileşmelerin gerçekleşmesi halinde X ne olmalıdır ? Etkileşme türlerini
söyleyiniz.
p + p → Σ + + K0 + π+ + π0 + X
Ξ-→π-+ X
K + → π+ + X + e- + ν
c ) Aşağıdaki etkileşmelerin quark yapısına göre şekillerini çiziniz
Ω - (sss) → Λ0 ( sud ) + K – ( us )
µ+ → e+ + νµ + νe
2- a) Aşağıdaki etkileşmelerin quark yapısına göre şekillerini çiziniz.
Λ0 ( usd ) → p( uud ) + π - (ud)
νµ + e- + → e- + νµ
b ) Aşağıdaki tepkileşmelerin gerçekleşip gerçekleşmediğine bakınız ve eğer
gerçekleşiyorsa
hangi tip etkileşme olduğunu belirleyiniz.
p + p → π0 + π0
µ+ → e+ + ν + ν
π - + p →Σ - + π+
3- Aşağıdaki tepkileşmelerin gerçekleşip gerçekleşmediğine bakınız ve eğer gerçekleşiyorsa
hangi tip etkileşme olduğunu belirleyiniz.
p + p→ p + n + π+
Σ - → Λ0 + e- + ν
K - + p → K0 + n
4- a) Aşağıdaki tepkileşmelerin gerçekleşip gerçekleşmediğine bakınız ve eğer
gerçekleşiyorsa hangi tip etkileşme olduğunu belirleyiniz.
Σ - → Λ0 + e- + ν
e- + p → e- + Σ 0 + K+
π - + p → Σ -+ π +
b) Aşağıdaki etkileşmelerin gerçekleşmesi halinde X ne olmalıdır ? Etkileşme türlerini
söyleyiniz.
K+ → π + + X + e+ + ν
K- + p → X +
Λ0
K
0
→π++X
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm II.8 1.sayfa
BÖLÜM IV
IV.2 LİE GRUBU VE LİE CEBRİ UYGULAMALARI
Bu kısımda bazı Lie Dönüşüm Grubu örnekleri ele alacağız ve bulunan jenaratörlerin
oluşturdukları Lie cebrini gözden geçireceğiz.
ÖRNEK-1. 1- boyutlu, ve 2-parametreli Lie dönüşüm gurubuna örnek olarak,
x ' = α1 x + α 2
koordinat dönüşümünü alabiliriz. Bu bir fiziksel dönüşüm olup, burada; (α 2 ) ötelemeyi,
(α 1 ) boyca değişimi ifade eden bağımsız parametrelerdir. Bir önceki kısımda tanımladığımız
Lie grubunun etkisiz elemanı bu örnekte
x = 1x + 0 , g (α1 ,α 2 ; x ) = g (1,0; x ) dır.
Etkisiz eleman civarındaki sonsuz küçük dönüşüm yapılarak, dx sonsuz küçük değişimi
x + dx = (1 + dα1 ) x + 0 + dα 2
dx = dα1 x + dα 2
olarak bulunur. Bu uzayda mevcut bir F=F(x) fiziksel büyüklüğü uzaydaki bu sürekli öteleme
ve boyca değişmeden , parametrelerdeki sonsuz küçük değişimlere bağlı olarak
dF =
∂F
∂F
dx = (dα 1 x + dα 2 )
dx
∂x
şekline değişir. Burada lineer bağımsız değişimler olan dα 1 katsayısı 1.jeneratörü (ötelemeye
karşılık gelen dönüşüm operatörünü), dα 2 katsayısı 2.jeneratörü (boyca değişime karşılık
gelen dönüşüm operatörünü) verir. Yani; Bu Lie grubu dönüşümü için jenaratörler aşağıdaki
şekildedir.
∂
→ α1
∂x
∂
X2 =
→α2
∂x
X1 = x
Bulunan bu jenaratörlerin komütasyon ilişkisi ise bu operatörleri bize bir LIE cebri oluşturup
oluşturmadığı hakkında bilgi verir. Bu bilgi bu uzayda bu dönüşümlerle oluşan invaryanslığın
yanında fiziksel olarak kapalılığı ifade eder ki; bu işlemler altında fiziksel modelleme
yapmamızı olanaklı kılar Şimdi bu komütasyon ilişkisini inceliyerim.
Kapalılık özelliği bir önceki kısımda gördüğümüz
G. Akdeniz, Temel Tanecikler Ders Notları, Bölüm IV.2 1. sayfa
[X , X ] = C
i
j
ijk
X k şeklinde idi.
∂ ∂
∂ ∂
∂ 2 A ∂A
∂2 A
∂A
−x 2 =−
A − x A = x 2 −
∂x ∂x
∂x
∂x
∂x
∂x
∂x ∂x
∂
⇒ [ X 1 , X 2 ] = − = − X 2 = C12k X k = C121 X 1 + C122 X 2 ⇒ C121 = 0, C122 = −1
∂x
[X 1 , X 2 ] = −[X 2 , X 1 ] = −C12k X k ⇒ C 211 = 0, C 212 = +1
[X 1 , X 2 ]A = x
Böylece ötelemeye tekabül eden operatör ile (momentum operatörü) ve boyca değişime
tekabül eden operatör arasında Lie cebri yapılaşmasını bulmuş oluruz.
ÖRNEK-2. 2-boyutta, 2-parametreli dönüşüm gurubuna örnek olarak iki boyutta boyca
büyüme alabiliriz. Böyle bir dönüşümün koordinat dönüşümleri
x '1 = a1 x1
x '2 = a 2 x2
şeklindedir. Bu dönüşümün etkisiz elemanı
x1 = 1x1
⇒ g (a1 , a 2 ; x1 , x 2 ) = g (1,1; x1 , x 2 )
x 2 = 1x2
olup, sonsuz küçük dönüşüm.
x1 + dx1 = (1 + da1 )x1 ⇒ dx1 = da1 x1
x 2 + dx 2 = (1 + da 2 )x 2 ⇒ dx 2 = da 2 x 2
şeklindedir. Bu dönüşüm için Jenaratörleri daha önceki kısımda verdiğimiz kapalı formu
kullanarak bulalım.
r
dxi = ∑ u iγ daγ , i = 1,......., n → boyut γ = 1,......, r → parametre
γ =1
2
⇒ dxi = ∑ u iγ daγ , i = 1,2 γ = 1,2
γ =1
olduğundan bu örnekte,
dx1 = u1γ daγ = u11 da1 + u12 da 2
dx 2 = u1γ daγ = u 21 da1 + u 22 da 2
⇒ u11 = x1 , u12 = 0, u 21 = 0, u 22 = x 2
olarak bulunur. Buradan jenaratörler
G. Akdeniz, Temel Tanecikler Ders Notları, Bölüm IV.2 2. sayfa
n
∂
X γ = ∑ u iγ
i =1
∂xi
2
∂
∂
∂
= u11
+ u 21
X 1 = ∑ u i1
∂x 2
∂x1
i =1
∂x i
2
∂
X 2 = ∑ u i 2
i =1
∂x i
∂
∂
= u12
+ u 22
∂x 2
∂x1
olmak üzere
∂
∂x1
⇒ X 1 = x1
∂
∂x 2
X 2 = x2
bulunurlar. Şimdi bu jenaratörlerin komütasyon ilişkisine bakıp bir Lie cebri oluşturup
oluşturmadıklarını görelim ve eğer bir Lie cebri oluşturuyorlar ise yapı sabitlerini
hesaplıyalım. Aşağıdaki hesapları yaptığımızda
[X 1 , X 2 ]A = x1
∂ ∂A
∂ ∂A
x 2
x1
− x 2
∂x1 ∂x 2 ∂x 2 ∂x1
∂2 A
∂2A
= x1 x 2
− x 2 x1
=0
∂x1 ∂x 2
∂x1 ∂x 2
[X 1 , X 2 ] = C12 k X k
= C121 X 1 + C122 X 2
C121 = C122 = 0 ⇒ C111 = C112 = C 211 = C 212 = 0
örnekte verilen dönüşümün bir Lie cebri oluşturduğunu görmüş oluyoruz ve yapı sabitlerini
hesaplamış oluyoruz.
ÖRNEK-3.
x1′ = (1 + a )x1
x 2′ = (1 + a ) x 2
−1
Dönüşüm grubunun jenaratörünü bulunuz.
Bu dönüşüm grubunun tek bir jenaratörü vardır. Bu jenaratör
(1 + a )
−1
≅ 1 − a ( a < 1 için).
Sınırlaması altında
G. Akdeniz, Temel Tanecikler Ders Notları, Bölüm IV.2 3. sayfa
x1 = (1 + 0)x1 ⇒ x1 + dx1 = (1 + da )x1 ⇒ dx1 = dax1
x 2 = (1 + 0 ) x 2 ⇒ x 2 + dx 2 = (1 + da ) x 2 = (1 − da )x 2 ⇒ dx 2 = − dax 2
−1
−1
olup
F ( x1 , x 2 ) ⇒ dF =
∂F
∂F
∂F
∂F
dx1 +
dx 2 = (dax1 )
− (dax 2 )
∂x1
∂x 2
∂x1
∂x 2
∂
∂
− x2
∂x 2
∂x1
şeklinde bulunur.
ÖRNEK-4.
⇒ X = x1
1
'
x
=
x1 + itgθ 2 x2
1
1 + Cosθ 1
1
x 2' = −itgθ 2 x1 +
x2
1 + Cosθ 1
Çözüm:
1
π
= 1 ⇒ θ1 =
1 + Cosθ 1
2
itgθ 2 = 0 ⇒ θ 2 = 0
1
x1 + itg 0 x2
1 + Cos 90
1
x 2 = −itg 0 x1 +
x2
1 + Cos 90
Sin(0 + dθ 1 )
1
x1 + dx1 =
x1 + i
x2
Cos (90 + dθ 1 )
1 + Cos(90 + dθ 1 )
x1 =
x 2 + dx2 = −i
x1 + dx1 =
Sin(0 + dθ 2 )
1
x1 +
x2
Cos (0 + dθ 2 )
1 − Sindθ 1
dθ << 1 ⇒ Sindθ ≅ dθ , Cosdθ ≅ 1
1
= (1 - dθ 1 ) −1 ≅ 1 + dθ 1
1 - dθ 1
1
x1 + idθ 2 x2 = (1 + dθ 1 ) x1 + idθ 2 x 2
1 − dθ 1
x 2 + dx2 = −idθ 2 x1 +
dx1 = dθ 1 x1 + idθ 2 x 2
1
x 2 = −idθ 2 x1 + (1 + dθ 1 ) x2
1 − dθ 1
,
dx2 = −idθ 2 x1 + dθ 1 x2
F = F ( x1 , x2 )
∂F
∂F
dF =
(dθ 11 + idθ 2 x2 ) +
( −idθ 2 x1 + dθ 1 x2 )
∂x1
∂x2
G. Akdeniz, Temel Tanecikler Ders Notları, Bölüm IV.2 4. sayfa
Bağımsız dθ 1 ve dθ 2 değişimlerine göre düzenlenerek jenaratörler ve yapı sabitleri
aşağıdaki şekilde bulunur.
X 1 = x1
∂
∂
+ x2
∂x1
∂x 2
X 2 = −ix 2
,
[X 1 , X 2 ] = 0 = C12 k X k
[X 1 , X 2 ] = 0
C121 = C122 = C 211 = C 212 = 0
[X 1 , X 1 ] = 0
∂
∂
− ix1
∂x1
∂x 2
C 221 = C 222 = 0
, C111 = C112 = 0
ÖRNEK-5.
x ′ 0 = x 0 chϕ + x 2 shϕ
x ′1 = x 1
x ′ 2 = x 0 shϕ + x 2 chϕ
x′ 3 = x 3
Çözüm
x ′ 0 = x 0 chϕ + x 2 shϕ
x 0′ = x 0
x 0′ = 1x 0 + 0 x 2 olması için
shϕ=0 ,chϕ=1 yani, ϕ=0,2π olmalı. Buradan
x 0 + dx 0 = x 0 ch(0 + dϕ ) + x 2 sh (0 + dϕ )
x 0 + dx 0 = x 0 (ch0chdϕ + sh0 shdϕ ) + x 2 (sh 0chdϕ + ch0 shdϕ )
x 0 + dx 0 = x 0 chdϕ + x 2 shdϕ
dϕ <<⇒ chdϕ = 1
shdϕ ≈ dϕ
0
0
0
2
0
2
( x + dx ) − x = dϕx
dx = x dϕ
x ′ 2 = x 0 shϕ + x 2 shdϕ
(x
0
)
+ dx 0 − x 0 = dϕx 2
dϕ <<⇒ chdϕ = 1
shd ϕ ≈ dϕ
⇒ dx 0 = x 2 dϕ
bulunur.
x ′ 2 = x 0 shϕ + x 2 chϕ
x ′ 2 = 0 x 0 + 1x 2
x′2 = x 2
shϕ = 0 , chϕ = 1 ise ϕ = 0,2π
G. Akdeniz, Temel Tanecikler Ders Notları, Bölüm IV.2 5. sayfa
(
)
x 2 + dx 2 = x 0 sh (0 + dϕ ) + x 2 ch(0 + dϕ ) ⇒ x 2 + dx 2 − x 2 = x 0 dϕ ⇒ dx 2 = x 0 dϕ
x 2 + dx 2 = x 0 shdϕ + x 2 chdϕ ≈ x 0 dϕ + x 2 1
x ′ = x ′ dx ′ = 0
,
x ′3 = x 3
dx 3 = 0 bulmuş olduk.
0
1
2
3
F=F ( x , x , x , x )
∂F
∂F
∂F
∂F
dF = 0 dx 0 +
dx ′ + 2 dx 2 + 3 dx 3
∂x ′
∂x
∂x
∂x
2
∂F 2
∂F 0
∂F
2 ∂F
dF = 0 x dϕ + 2 x dϕ = ( x
+ x 0 2 )dϕ
0
∂x
∂x
∂x
∂x
∂
∂
x1 = x 2 0 + x 0 2 jeneratörü bulunur.
∂x
∂x
ORNEK-6.a.
a
′
x1 = 21 + x1 + 2bx 2
2
a
′
x 2 = 2bx1 + 2(1 + ) x 2
2
Çözüm
′
x1 = x1 olması için;
′
x1 = 1x1 + 0 x 2
2b = 0 ⇒ b = 0
0
2(1 + ) = 1 ⇒ a = -1
2
(−1 + da )
) x1 + 2(0 + db) x 2
2
( x1 + dx1 ) − x1 = (1 + da) x1 + 2dbx2 − x1 ⇒ dx1 = dax1 + 2dbx2
x1 + dx1 = 2(1 +
diğer koordinat için aynı şekilde
a
x 2′ = 2bx1 + 2(1 + ) x 2
x ′2 = 0 x1 + 1x 2
; b = 0 a = -1
2
(−1 + da )
x 2 + dx 2 = 2(0 + db) x1 + 2(1 +
) x2
2
( x 2 + dx 2 ) − x = 2dbx1 + (1 + da) x 2 − x 2 ⇒ dx 2 = 2dbx1 + dax 2
bulunur. Buradan,
∂F
∂F
dx1 +
dx 2
∂x 1
∂x 2
G. Akdeniz, Temel Tanecikler Ders Notları, Bölüm IV.2 6. sayfa
F=F ( x1 ; x 2 )
dF =
dF =
∂F
∂F
(dax1 + 2dbx 2 ) +
(2dbx1 + dax 2 )
∂x 1
∂x 2
∂F
∂F
∂F
∂F
db
da + 2 x 2
dF= x1
+ 2 x1
+ x2
∂x1
∂x 2
∂x 2
∂x1
olduğundan
∂
∂
+ x2
∂x1
∂x2
∂
∂
2.Jenaratör; X 2 = 2 x 2
+ 2 x1
∂x1
∂x 2
1.Jenaratör; X 1 = x1
bulunur. Bunların komütasyon ilişkileri
[X
1
; X 1 ] = C111 X 1 + C112 X 2
[X
2
; X 1 ] = C 211 X 1 + C122 X 2
[X
2
∂
∂ ∂A
∂A
x1
−
; X 1 ]A = X 2 X 1 A − X 1 X 2 A = 2 x2
+ 2 x1
+ x2
x
x
x
x
∂
∂
∂
∂
1
2
1
2
∂
∂
∂A
∂A
x
x
x
x
2
2
+
+
1
2
1
2 ∂x
x
x
x
∂
∂
∂
1
2
1
2
∂A
∂2 A
∂A
∂2 A
∂2 A
∂A
+ 2 x1 x1
[X 2 ; X 1 ] = 2 x2 + x1 2 + 2 x2 x2
+ 2 x1
+ x2
∂x 1
∂x2 ∂x1
∂x2
∂x1
∂x1∂x 2
∂x 2
∂A
∂2 A
∂2 A
∂A
∂2 A
∂ 2 A
=0
+ x 2 2
+ x2 2 x1
− x1 2 x2 2 + x1 2
+ 2 x1
+ 2 x2 x2
2
x
x
x
x
x
x
x
∂
∂
∂
∂
∂
∂
∂
1
x
∂
2
1
2
1
2
1
2
C 211 = 0, C 212 = 0
yapı sabitlerini bulduk.
ÖRNEK-6.b.
x′ 0 = x 0
x′1 = x1
x′ 2 = cosθ x 2 + sinθ x 3
x′3 = − sinθ x 2 + cosθ x 3
Bu dönüşüm uzay-zamanda x1 ekseni etrafında dönmeyi ifade etmektedir.Dört boyutlu bir
parametreli dönüşüme bir örnektir. Bu dönüşümün türev operatörü ise
Etkisiz eleman
g θ ; x 0 , x 1 , x 2 , x 3 = g (0)
dθ << 1 için cos dθ ≅ 1, sin dθ ≅ dθ dır.
G. Akdeniz, Temel Tanecikler Ders Notları, Bölüm IV.2 7. sayfa
(
)
olmak üzere;
x 2 + dx 2 = cos(0 + dθ )x 2 + sin (0 + dθ )x 3 = x 2 cos dθ + x 3 sin θ
x 3 + dx 3 = − sin (0 + dθ )x 2 + cos(0 + dθ )x 3 = − x 2 sin dθ + x 3 cos dθ
⇒ x 2 + dx 2 = x 2 + x 3 dθ ⇒ dx 2 = x 3 dθ
x 3 + dx 3 = − x 2 dθ + x 3 ⇒ dx 3 = − x 2 dθ
olduğundan türev operatörü
∂F 0 ∂F 1 ∂F 2 ∂F 3
dx + 1 dx + 2 dx + 3 dx
∂x
∂x
∂x
∂x 0
∂F
∂F
∂F
∂F
⇒ dF = 0 dx 0 + 1 dx 1 + x 3 dθ 2 − x 2 dθ 3
∂x
∂x
∂x
∂x
i 3 ∂
∂
∂
∂
X = x3 2 − x2 3
⇒
− x 2 3 = L x′
x
2
h ∂x
∂x
∂x
∂x
şeklinde bulunur. Görüldüğü gibi bu bize açısal momentum operatörünü verir.
(
)
F x 0 , x 1 , x 2 , x 3 ⇒ dF =
G. Akdeniz, Temel Tanecikler Ders Notları, Bölüm IV.2 8. sayfa
Örnek: SL(1,1) dönüşüm grubunun jeneratörünün bulunuz. ( Burada; S dönüşüm matrisinin
determinantının 1 olduğunu, L dönüşüm matrisinin Lorentz matrisi olduğunu ve (1,1) ise
dönüşümün 1 zaman ve 1 uzay boyutlarında olduğunu ifade etmektedir.)
Lorentz Dönüşümleri: Bu örneği yapabilmemiz için Lorentz dönüşümlerini hatırlayalım.
Aşağıdaki şekildeki gibi, bir (S) sistemi ve bu (S) sistemine göre v hızıyla düzgün doğrusal
hareket yapan bir (S’) sistemi olsun.
ct
(S)
ct’
(S’)
P
r
x
r’
r’
v
x’
P noktasının koordinatları x0 = ct ve x1 = x olmak üzere, (S) sisteminde (x0 , x1), (S’)
sisteminde (x0’ , x1’), γ = [1/(1-β2)] ½ ve β = v / c olmak üzere, (S) sistemi ile (S’) sistemi
arasındaki dönüşümleri veren bağıntılar (Lorentz dönüşümleri ),
x0’ = γ(x0 – βx1)
x1’ = γ(x1 – βx0)
x2’ = x2
x3’ = x3
koordinat dönüşümleri ile verilir.Bu koordinat dönüşümü X, X’ koordinatları ifade eden sütun
matrisleri olmak üzere matris formunda
X’=LX
olarak yazılabilir ve
x0’ = L x0
x1’
x1
şeklinde gösterilir.Burada L, elemanlarını Lorentz dönüşümlerinden elde ettiğimiz matristir.
γ
-γβ
L = -γβ γ
Lorentz grubu için ortogonal birim matris: Einstein’ın özel rölativite teorisi, uzay-zamanı
birlikte mutlak kabul eder ve koordinat dönüşümlerinde
xµxµ = c2t2 – x2 = c2t’2 – x’2 = sabit
olduğunu söyler. Bu özellik matris formunda
LTGL =G
G. Akdeniz, Temel Tanecikler Ders Notları, Bölüm IV.2 9. sayfa
ile ifade edilir. Burada G, Minkowski metriğini veren, transpozesi kendisine eşit (simetrik) ve
karesi de I birim matrise eşit olan matrisdir.
G=
1 0
0 -1
Daha önceki örneklere benzer şekilde, Lorentz koordinat dönüşümünün transpozesini
alıp, sağ taraftan GX ile çarparsak,
X’T = (LX)T = XTLT => X’TGX’ = XTGX = G
olduğu görülür.
Şimdi uzay ve zaman için sonsuz küçük ötelemeleri verecek olan dL matrisini
oluşturalım. (c = 1)
t + dt
t
x + dx = (I + dL) x
ai<<1 olmak üzere,
a1 a2
dL = a a olsun. Buradan
3
4
a1
dLT = a2
a3
a4
olur.
Dönüşüm özelliğinden dolayı
[(I + dL)TG](I + dL) = G
(I + dLTG)(I + dL) = G
G + GdL + dLT G+ dLTGdL = G
GG = I
GdLG = -dLT
olur. dLTGdL terimini çok küçük olacağı için ihmal edebiliriz. Bu durumda dL = - dLT
bulunur, ki bu da dL matrisinin anti - simetrik olmasıdır. Şimdi dL matrisinin anti – simetrik
olma özelliğini kullanarak matrisin elemanlarını hesaplayalım.
a1
a3
a2
a1
a4 = - a2
a3
a4
a1 = - a1 => 2a1 = 0 => a1 = 0
a4 = - a4 => 2a4 = 0 => a4 = 0
a2 = - a3 => a2 + a3 = 0
a3 = - a2 => a2 + a3 = 0
G. Akdeniz, Temel Tanecikler Ders Notları, Bölüm IV.2 9. sayfa
sonuçları elde edilir. Görüldüğü gibi elimizde a2 ve a3 bilinmeyenlerine bağlı iki denklem
sistemi var.
a2 + a3 = 0
a2 + a3 = 0
1
1
1
1
Bu homojen denklem sistemidir ve katsayılar matrisinin determinantı
sıfır ise sonsuz çözüm vardır. Sıfırdan farklı ise yalnız trivial çözüm
vardır. Katsayılar matrisinin determinantını hesaplayalım:
= 0 olduğundan dolayı sonsuz çözüm vardır.
O halde a2 = dk olsun. Bu durumda a3 = - dk olur.
dL = 0 dk
dk 0
I + dL =
t + dt
x + dx
t
=( I + dL) x
t + dt
x + dx
t + dt = t + xdk
1 dk
dk 1
=>
=
t + dt
x + dx =
1 dk
dk 1
t
x
t + xdk
tdk+ x
=> dt = xdk
x + dx = tdk + x => dx = tdk
bulunur.dF = dt (∂F/∂t ) + dx (∂F/∂x) ifadesinde bulduğumuz dt ve dx ifadelerini yerine
yazalım.
dF = dk[x(∂/∂t) +t (∂/∂x)]
elde edilir. Öyleyse jeneratörümüz
J = x(∂/∂t) + t (∂/∂x)
olarak bulunur.
Bu jeneratör uzay - zamana bağlı olan büyüklükte, uzay değişimleri ile zaman
değişimlerinin birbirinden bağımsız olmadığını gösterir.
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm IV.2 10.sayfa
IV.2.1 PROBLEMLER
1- x ' = e -a x+ (1 + b) koordinat dönüşümünün oluşturduğu Lie Grubunun türev operatörlerini
( J1 , J2 jenaratörlerini ) bulunuz. Burada J1 , a sabitine ait jeneratör ve J2 , b sabitine ait
jeneratörlerdir.
1 3 ix
e
0
0 - 3ix
e
1
, σ = 0 1
1 0
Pauli spin matrisi ve A = σ J1 olmak üzere A operatörünün < Ψ | Α | Ψ > beklenen değerini
hesaplayınız
a) [x J1 , J2 2 ] komütatör ifadesini hesaplayınız.
2- x ' = (Sina) x + b
y ' = (Sina) y + b
bulunuz .
b) ψ =
+
koordinat dönüşümünün oluşturduğu Lie Grubunun türev operatörlerini
( J1 , a sabitine ait jeneratör ve J2 b sabitine ait jeneratör) olmak üzere
J12 , J22 ve [ J1 2 + J22, J2 ] komütatör ifadelerini hesaplayınız.
3- x ' = e - a x + b
koordinat dönüşümünün oluşturduğu Lie Grubunun türev operatörlerini
( J1 , J2 jenaratörlerini ) bulunuz. Burada J1 , a sabitine ait jeneratör ve
J2 , sabitine ait jeneratörlerdir. a) J12 ve J22 operatörlerini ve [J1 2 + J22 , J2 ] komütatör ifadesini
hesaplayınız
y'=ea y+ b
4- x1` = e a x1 + (1-2b) x2
koordinat dönüşümünün oluşturduğu Lie grubunun türev operatörlerini
( J1 , J2 )
x2`= (1-2b) x1 + e a x2
jenaratörlerini ) bulunuz . Burada J1 , a sabitine ait jenaratör ve J2 , b
sabitine ait jeneratörlerdir . a) [ J12 + J22 , J2] komütatör ifadesini hesaplayınız. b) e J J2 e J
ifadesini hesaplayınız.
5- x ' = a x + (1- b) koordinat dönüşümünün oluşturduğu türev operatörlerini ( X1 , X2
jenaratörlerini ) bulunuz Burada X1 , a sabitine ait jeneratör ve X2 b sabitine ait
jeneratörlerdir. a) Yapı sabitlerini hesaplayınız. b) [ X12 + X2 2 , X1 ] komütatör
ifadesini hesaplayınız. c)
e X2
X1
e−X 2
ifadesini hesaplayınız
6- x ' = ax + b koordinat dönüşümünün oluşturduğu türev operatörlerini ( J1 , J2
jenaratörlerini) bulunuz Burada J1 , a parametresine ait jeneratör ve J2 b parametresine
ait jeneratörlerdir.
[ x J2 , 2 J1 ] komütatör ifadesini hesaplayınız.
7- x ' = ax + (1- b) koordinat dönüşümünün oluşturduğu türev operatörlerini ( J1 , J2
jenaratörlerini) bulunuz Burada J1 , a parametresine ait jeneratör ve J2 b parametresine
ait jeneratörlerdir.
[ 3 J2 , x J1 ] komütatör ifadesini hesaplayınız.
G. Akdeniz, Temel Tanecikler Ders Notları, Bölüm IV.2.1 1. sayfa
8- x ' = (cosa) x + sinb koordinat dönüşümünün oluşturduğu türev operatörlerini ( J1 , J2
jenaratörlerini) bulunuz Burada J1 , a parametresine ait jeneratör ve J2 b parametresine
ait jeneratörlerdir. a ) [ J12 + J2 2 , J1 ] komütatör ifadesini hesaplayınız.
b)
eJ
2
J1
e−J
2
ifadesini hesaplayınız
9- x ' = e - a x + (1- b) koordinat dönüşümünün oluşturduğu türev operatörlerini ( J1 , J2
jenaratörlerini ) bulunuz Burada J1 , a parametresine ait jeneratör ve J2 b parametresine
ait jeneratörlerdir. a) [ J12 + J2 2 , J1 ] komütatör ifadesini hesaplayınız.
b)
eJ
2
J1
e−J
2
ifadesini hesaplayınız
10- x ' = e - a x + by
y ' = e -a y + bx
koordinat dönüşümünün oluşturduğu Lie Grubunun türev operatörlerini
( X1 , X2 jenaratörlerini ) bulunuz. Burada X1 , a sabitine ait jeneratör
ve X2 b sabitine ait jeneratörlerdir. a) Lie cebiri yapı sabitlerini hesaplayınız.
b) [ X12 + X2 2 , X1 ] komütatör ifadesini hesaplayınız. c) e X 1 X2 e − X 1 ifadesini hesaplayınız.
11- x ' = a x+ (1 - b)y koordinat dönüşümünün oluşturduğu Lie Grubunun türev operatörlerini
y ' = a y+ (1- b)x
( X1 , X2 jenaratörlerini ) bulunuz. Burada X1 , a sabitine ait jeneratör
ve X2 b sabitine ait jeneratörlerdir. a) Lie cebiri yapı sabitlerini hesaplayınız. b)
12- x ' = e
-a
e
X
x+ (1 + b)y
1
X2 e − X 1 ifadesini hesaplayınız.
koordinat dönüşümünün oluşturduğu Lie Grubunun türev
operatörlerini
y ' = e -a y+ (1 + b)x
( X1 , X2 jenaratörlerini ) bulunuz. Burada X1 , a sabitine ait jeneratör
ve X2 b sabitine ait jeneratörlerdir. [ X12 + X2 2 , X1 ] komütatör ifadesini
hesaplayınız.
13-x ' = (Sina) x + b
y ' = (Sina) y + b
koordinat dönüşümünün oluşturduğu Lie Grubunun türev operatörlerini
( J1 , a sabitine ait jeneratör ve J2 b sabitine ait jeneratör) olmak üzere
bulunuz. J12 ve [ J1 2 , J2 ] komütatör ifadelerini hesaplayınız.
14-x ' = (1-a)x + b
koordinat dönüşümünün oluşturduğu Lie Grubunun türev operatörlerini
( J1 , J2 jenaratörlerini ) bulunuz. Burada J1 , a sabitine ait jeneratör ve J2 , b sabitine ait
jeneratörlerdir.
1
Sin2x
0
0
Cos2x
1
, σ3 = 1 0
0 −1
Pauli spin matrisi ve A = σ3J2 olmak üzere A operatörünün < Ψ | Α | Ψ > beklenen değerini
a) [x2 J1 , J2 ] komütatör ifadesini hesaplayınız. b) ψ =
+
hesaplayınız.
G. Akdeniz, Temel Tanecikler Ders Notları, Bölüm IV.2.1 2. sayfa
BÖLÜM IV
SU(2) VE SU(3) GRUBU JENERATÖRLERİNİN MATRİS GÖSTERİMİ
a) SU(2) grubu jeneratörlerinin matris gösterimleri.
b) SU(3) grubu jeneratörlerinin matris gösterimleri.
a) SU(2) grubu jeneratörleri 2x2 boyutlu matrislerdir. Uniter matristir ve determinantı
bire eşittir.
SU(2) grubu jeneratörlerini λα ile gösterelim.
SU(2) grubu n 2 − 1 = 2 2 − 1 = 3 jeneratöre sahiptir, yani α = 1, 2,3 olmaktadır.
)
Fα operatörleri SU(2) grubu jeneratörleri olsun.
)
λα = 2 Fα ile verilir.
Ortagonallık koşulundan
qi q j = δ ij
olmaktadır.
)
)
T+ yükseltme T− alçaltma operatörleri olmak üzere,
(
)
)
) 1 )
)
F1 = T1 = T+ + T−
2
)
)
1 ) )
F2 = T2 = − i T+ − T−
2
)
)
F3 = T3
(
)
ile verilmektedir. Ayrıca
)
T+ q j = δ j 2 q1 ,
)
T− q j = δ j 1 q 2 ,
)
1
T3 q1 = q1 ,
2
)
1
T3 q 2 = − q 2 ,
2
)
T3 q3 = 0 q3
şeklindedir.
G. Akdeniz, Temel Tanecikler Ders notları, Bölüm IV.3.a 1. sayfa
(λ) )
= 2 qi Fα q j
(λ) )
)
)
)
)
= 2 qi F1 q j = qi T+ + T− q j = qi T+ q j + q i T− q j
α ij
1 ij
ise;
= qi q1 δ j 2 + qi q 2 δ j1 = δ i1δ j 2 + δ i 2 δ j1
(λ) ) = (λ) )
(λ) ) = (λ) )
1 12
1 21
=1
1 11
1 22
=0
ise
) 0 1
λ1 =
1 0
(λ) )
2 ij
olur.
[
]
)
)
)
1
= 2 qi F2 q j = qi T+ q j − qi T− q j
i
= −i qi q1 δ j 2 − qi q 2 δ j1 = −i(δ i1δ j 2 − δ i 2δ j1 )
[
(λ) )
(λ) )
2 12
= −i
=i
( )
2 21
)
λ
11
( )
)
= λ1
) 0 − i
λ 2 =
i 0
3
3
3
)
=
2
q
F
i
3 qj
ij
)
= 2 qi T3 q1
i1
)
=
2
q
T
i 3 q2
i2
)
=
2
q
T
i 3 q3
i3
(λ) )
(λ) )
(λ) )
3 i3
3 22
3 12
= 0
22
ise
olur.
(λ) )
(λ) )
(λ) )
(λ) )
3
]
)
= 2 qi T3 q j
= 2 qi q1 = δ i1
= − qi q 2 = −δ i 2
=0
=1
= −1
)
= λ1
( )
21
) 1 0
λ1 =
0 − 1
=0
ise
olur.
G. Akdeniz, Temel Tanecikler Ders notları, Bölüm IV.3.a 2. sayfa
Buradan SU(2) grubunun jeneratörleri olan λ1 , λ 2 , λ3 ’ün Pauli matrisleri olduğu
görülmektedir.
1
0
− i
0
0
− 1
i 0
J 1 = −
2 1
i 0
J 2 = −
2i
i 1
J 3 = −
2 0
b) SU(3) grubunun ise n 2 − 1 = 3 2 − 1 = 9 tane jeneratörü vardır.
)
λα = 2 Fα ve qi q j = δ ij
) ) )
) ) )
Burada T+ , U + , V+ yükseltme operatörleri, T− , U − , V− alçaltma operatörleri olmak üzere;
)
T− q1 = q 2 ,
)
T+ q 2 = q1 ,
)
U − q 2 = q3 ,
)
U + q3 = q2 ,
)
V+ q3 = q1 ,
)
V− q1 = q3 ,
)
1
T3 q1 = q1 ,
2
)
1
T3 q 2 = − q 2
2
)
T3 q3 = 0 q3
)
1
Y q1 = q1
3
)
1
Y q2 = q2
3
)
2
Y q 3 = − q3
3
(
)
)
) 1 )
)
F1 = T1 = T+ + T−
2
)
)
1 ) )
F2 = T2 = − i T+ − T−
2
)
)
F3 = T3
G. Akdeniz, Temel Tanecikler Ders notları, Bölüm IV.3.a 3. sayfa
(
)
(
)
(
1 )
F5 = − i V+ − V−
2
)
)
1 )
F6 = U + + U −
2
(
)
)
(λ) )
= 2 qi Fα q j
(λ) )
)
)
)
)
= 2 qi F1 q j = q i T+ + T− q j = q i T+ q j + qi T− q j
α ij
1 ij
)
T+ q j = δ j 2 q1
(λ) )
1 ij
ise;
)
T− q j = δ j 1 q 2
ve
ise;
= qi q1 δ j 2 + qi q2 δ j1 = δ i 2δ j 2 + δ i 2δ j1
(λ) ) = (λ) ) = 1 ,
(λ) ) = (λ) ) = (λ) ) = (λ) )
1 12
1 21
1 11
1 13
1 22
1 23
0 1 0
)
λ1 = 1 0 0
0 0 0
olur.
(λ) )
[
2 ij
( )
)
= λ1
31
( )
)
= λ1
( )
)
= λ1
32
]
33
=0
)
)
)
1
= 2 q i F2 q j = qi T+ q j − qi T− q j
i
= −i qi q1 δ j 2 − qi q 2 δ j1 = −i δ i1δ j 2 + δ i 2δ j1
[
(λ) ) = −i
(λ) ) = 0
(λ) ) = (λ) ) = 0
(λ) ) = (λ) ) = (λ) )
]
[
ise;
]
2 12
2 13
2 22
2 23
2 13
2 32
0 − i 0
)
λ2 = i 0 0
0 0 0
(λ) )
)
(λ )
3 ij
3
(λ) )
i1
3 i2
2 33
=0
ise;
olur.
)
)
= 2 qi F3 q j = 2 qi T3 q j
)
= 2 qi T3 q1 = qi q1 = δ i1
)
= 2 qi T3 q 2 = − qi q 2 = −δ i 2
(λ) )
3 i2
)
= 2 q i T3 q3 = 0
G. Akdeniz, Temel Tanecikler Ders notları, Bölüm IV.3.a 4. sayfa
(λ) )
(λ) )
(λ) )
3 11
3 22
3 12
=1
= −1
)
= λ3
( ) = (λ) )
3 21
13
( )
)
= λ3
1 0 0
)
λ3 = 0 − 1 0
0 0 0
23
( )
)
= λ3
31
( )
)
= λ3
32
( )
)
= λ3
33
=0
ise;
olur.
(λ) )
)
)
)
= 2 q i F4 q j = qi V+ q j + qi V− q j
)
)
V+ q j = δ j 3 q1
ve V− q j = δ j1 q3
4 ij
(λ) )
4 ij
= qi q1 δ j 3 + qi q3 δ j1 = δ i1δ j 3 + δ i 3δ j1
(λ) ) = (λ) ) = 1
(λ) ) = (λ) ) = (λ) ) = (λ) )
4 13
4 31
4 11
4 12
4 21
0 0 1
)
λ3 = 0 0 0
1 0 0
(λ) )
5 ij
ise;
=
4 22
( )
)
= λ4
23
( )
)
= λ4
32
( )
)
= λ4
=0
ise;
olur.
[
]
[
)
)
1
1
qi V+ q j − qi V− q j = δ i1δ j 3 − δ i 3δ j1
i
i
(λ) ) = −i
(λ) ) = i
(λ) ) = (λ) )
33
]
5 13
5 31
5 11
5 12
( ) = (λ) )
)
= λ5
0 0 − i
)
λ5 = 0 0 0
i 0 0
(λ) )
6 ij
6 ij
5 22
23
( )
)
= λ5
32
( )
)
= λ5
33
=0
ise;
olur.
)
)
)
= 2 qi F6 q j = qi U + q j + qi U − q j
)
U + q j = δ j3 q 2
(λ) )
21
( )
)
= λ5
ve
)
U − q j = δ j2 q3
= qi q 2 δ j 3 + qi q3 δ j 2 = δ i1δ j 3 + δ i 3δ j 2
ise;
(λ) )
6 23
( )
)
= λ6
32
G. Akdeniz, Temel Tanecikler Ders notları, Bölüm IV.3 .a 5. sayfa
=1
(λ) ) = (λ) )
6 11
6 12
( ) = (λ) )
)
= λ6
13
0 0 0
)
λ6 = 0 0 1
0 1 0
(λ) )
= −i
(λ) )
=i
7 32
8 ij
31
( )
)
= λ6
7 12
33
=0
ise;
=0
ise;
olur.
( ) = (λ) )
)
= λ7
13
0 0 0
)
λ6 = 0 0 − i
0 i 0
(λ) )
(λ) )
( )
)
= λ6
[
)
)
1
1
qi U + q j − qi U − q j = δ i 2δ j 3 − δ i 3δ j 2
i
i
(λ) ) = (λ) )
7 11
22
]
=
7 23
( )
)
= λ6
[
(λ) )
7 ij
6 21
7 21
( )
)
= λ7
( )
)
= λ7
( )
=0
22
)
= λ7
31
)
= λ8
31
]
( )
33
olur.
)
)
= 2 qi F8 q j = 3 qi Y q j
)
1
= 3 qi Y q1 =
δ i1
3
)
1
= 3 qi Y q 2 =
δi2
i2
3
)
2
=
3
q
Y
q3 = −
δ i3
i
i3
3
)
1
= λ8 22 =
11
3
2
=−
33
3
)
)
)
)
= λ8 13 = λ8 21 = λ8 23 = λ8
12
8 i1
(λ) )
8
(λ) )
8
(λ) ) ( )
8
(λ) )
(λ) ) ( ) ( ) ( )
8
8
1 0 0
)
1
λ8 =
0 1 0
3
0 0 − 2
( )
32
ise;
olur.
G. Akdeniz, Temel Tanecikler Ders notları, Bölüm IV.3 .a 6. sayf
IV.3 SU(2) GRUBU TÜREV OPERATÖRLERİ
Geometrik simetriler yanında iç simetri adını verdiğimiz simetrik özelliklerde parçacıklar
dünyasında mevcuttur. Bu iç simetrilerin dinamik yapısına ayar grupları diyoruz.
Bu simetrilerin ilki elektromanyetik etkileşmeyle bilinen U(1) ayar simetrisidir. Bu
simetrinin dinamik yapılaşmasını veren foton alış verişidir.
Zayıf etkileşmenin simetrisi SU(2) dir. Buradaki S herhangi bu dönüşümü veren matrisin
veya operatörün determinantının 1 olduğunu söyler. Buda özel matristir. U ise dönüşüm
matrisinin veya operatörünün bir uniter matris veya uniter operatör olduğunu ifade eder. 2
sayısı ise dönüşüm matrisinin 2×2 lik bir kare matris oldugunu söyler.
(U )
* T
=U†
U †U = I
U =U
†
(Uniter matris)
−1
Eğer zayıf etkileşmede bir durum, bir hal, bir yapı Ψ ile gösteriliyor ise buradaki Ψ alanı
iki boyutlu sütun matrisi özelliği de gösterir.
Ψ
Ψ = 11 (Ψ→ Zayıf etkileşmede bir hal,yapı)
Ψ12
Ψ †Ψ = I
oluyorsa
Ψ † = UΨ
Ψ '† Ψ ' = Ψ † Ψ korunumu sağlanmalıdır.
Bu özellik bize zayıf etkileşmeler için 3 korunan büyüklüğün yeterli olduğunu söyler.
Bunun karşılığı olarak bu etkileşmeyi verecek dinamik yapı en fazla 3 ana parçacıktan oluşur.
†
Ψ '† = (UΨ ) = Ψ †U †
U †U = 1
Ψ '† Ψ ' = Ψ †U †UΨ = Ψ † Ψ
Şimdi bu dönüşümü ifade eden Lie operatörünü bulalım. U matrisi bir dönüşüm matrisidir ve
grup özelliği gösterir. Ψ iki boyutlu, dönüşüm parametrelerimiz U matrisinin içinde;
Ψ = IΨ
dΨ + Ψ = ( I + dU )Ψ
( I + dU )† ( I + dU ) = I
I + dU + dU † + dU †dU = I
dU + dU † ≅ 0
dU ≅ − dU †
dU matrisi yaklaşıklıkla bile olsa anti hermitsel matris özelliğini gösterir.
dΨ = dUΨ 2×2 lik matrisi inşaa edelim
a + ia2 a3 + ia4
a − ia2 a3 − ia4
dU = 1
dU † = 1
a5 + ia6 a7 + ia8
a5 − ia6 a7 − ia8
dU ≅ − dU † olduğundan
G. Akdeniz, Temel Tanecikler Ders notları, Bölüm IV.3 1. sayfa
a1 + ia2 = −a1 + ia2 ⇒ a1 = − a1 ⇒ 2a1 = 0 ⇒ a1 = 0
a3 + ia4 = − a5 + ia6 ⇒ a3 = − a5
a4 = a6
a5 + ia6 = − a3 + ia4 ⇒ a5 = − a3
a6 = a4
a2 = a2
a7 + ia8 = − a7 + ia8 ⇒ a7 = 0
a8 = a8
katsayılar matrisinin determinantı sıfırsa sonsuz çözümü ,değilse tek çözümü var.
a3 + a5 = 0
1 1
=0
a3 + a5 = 0
1 1
katsayılar matrisini dU da yazalım;
− a5 + ia6
1 + ia2 − a5 + ia6
ia2
dU =
I + dU =
a
ia
a
a
ia
a
+
1
+
+
6
8
6
8
5
5
det U = 1
det(I + dU ) = 1
(1 + ia2 )(1 + ia8 ) − (− a5 + ia6 )(a5 + ia6 ) = 1
1 + ia2 + ia8 + ia2ia8 + 0 ≅ 1
ia2 = −ia8 ⇒ a2 = − a8
matrisi yeniden yazalım
− ia 8
dU =
a 5 + ia 6
− ida
dU =
db + idc
− a 5 + ia 6
ia 8
− db + idc
ida
a8 = da, a5 = db, a6 = dc
x
dx
Ψ =
dΨ =
y
dy
− db + idc x
dx − ida
dx
x
=
= dU
ida y
dy db + idc
dy
y
dx = −ixda − ydb + iydc
dy = xdb + ixdc + iyda
∂F
∂F
+ dy
F = F ( x, y ) olduğundan dF = dx
∂y
∂x
∂
∂
∂
∂
∂
∂
= da − ix + iy F + db − y + x F + dc iy + ix F
∂x
∂y
∂y
∂y
∂y
∂x
∂
∂
∂
∂
∂
∂
J1 = −ix + iy
J2 = x − y
J 3 = ix + iy
∂x
∂y
∂y
∂x
∂y
∂x
Bu üç operatörü aynı kuantum fiziğinde olduğu gibi korunan büyüklüklere karşılık gelen
kuantum sayıları arasındaki bağımlı veya bağımsız ilişkileri verir. J2 operatörü Lz
operatörüdür.
Bu da SO(2) nm , SU(2) nin bir alt drubu olduğunu ifade eder. Zayıf etkileşmede spin
kavramı kendiliğinden ortaya çıkar ki bunu izospin olarak genişletebiliriz
[J1, J 2 ], [J 2 , J 3 ], [J 3 , J1 ]
J i , J j = Cijk J k (kapalılık özelliği gösterir) Cijk’lar yapı sabitleridir ve kuantum sayılarının
alabileceği değerleri gösterirler.
G. Akdeniz, Temel Tanecikler Ders notları, Bölüm IV.3 2. sayfa
[
]
[J , J ]
i
j
∂
∂ ∂
∂
− ix + iy , x − y
∂x
∂y ∂y
∂x
∂
∂ ∂
∂ ∂
∂
∂
∂
= − ix , x + − x ,− y + iy , x + iy ,− y
∂x
∂x ∂y ∂y ∂y
∂x ∂y ∂x
∂
∂
∂
− ix ∂x , x ∂y J = −ix ∂y
∂J
∂
∂ ∂J
= −ix x − x − ix
∂x
∂y
∂x ∂y
= −ix
∂2 J
∂2 J
∂J
+ ix 2
− ix 2
∂y∂x
∂x∂y
∂y
∂
∂
∂
− ix ∂x ,− y ∂x J = −iy ∂x
∂2 J
∂J
∂2 J
∂
∂J
∂
∂J
− ixy 2
− ix − y + y − ix = ixy 2 − ix
∂y
∂y
∂y
∂x
∂x
∂x
∂x
∂
∂
∂
iy ∂y , x ∂x y = −iy ∂x
∂ ∂J
∂J
∂2 J
∂2 J
∂ ∂J
− iy 2
− iy 2
iy y + y iy = iy
∂x ∂y
∂x
∂y∂x
∂x∂y
∂y ∂x
[J1, J 2 ] = −ix
∂
∂
∂
∂
− iy − ix − iy
∂y
∂x
∂y
∂x
[J1, J 2 ] = 2 − ix
C121=0
C211=0
∂
∂
− iy = −2 J 3
∂y
∂x
C122=0
C123=-2
C212=0
C213=2
G. Akdeniz, Temel Tanecikler Ders notları, Bölüm IV.3 3. sayfa
IV.3 SU(3) GRUBU TÜREV OPERATÖRLERİ
Bu dönüşümün A matrisi 3x3 bir sanal matris olup, bu A matrisi kuantum büyüklüklerinin
simetrik özellikleri nedeni ile üniter bir matristir ve özel bir matristir. Yani;
X ' = Ax dönüşümünde A + A = I ve detA=I dır.
Etkisiz dönüşüm civarındaki sonsuz küçük dönüşüm ise
SU(3) Gurubu ;S(special A = 1 ) ,U(üniterlik A t A = I ) , (3) boyut
3 × 3 = 9,9 × 2 = 18,18 − 9{
= 9,9 − 1{ = 8 jeneratör vardır.
üniterlik
det →1
X ' = AX
X = IX ⇒ X + dX = ( I + dA) X ⇒ dX + dAX
dönüşümünde sonsuz küçük dönüşümü oluşturan elemanları sonsuz küçük parametrelerden
oluşmuş dA matrisini
a0 + ia1
dA = a 6 + ia7
a + ia
13
12
a 2 + ia3
a8 + ia9
a14 + ia15
a 4 + ia5
a10 + ia11
a16 + ia17
şeklinde ifade edebiliriz. Burada ai elemanları sonsuz küçük parametrelerdir. Bu dönüşümün
özelliğinden
dA matrisi aşağıdaki özellikleri sağlamalıdır.
(I + dA)t (I + dA) = I
⇒ dAt = − dA
(I + dA )(I + dA) = I ⇒ I + dA + dA
t
det ( I + dA) = 1
t
+ dA t dA = I
Bu özelliklerden dolayı dA matrisinin elemanları için;
a6 − ia 7 = − a 2 − ia3
Bu iki terimin farkını alırsak a7 = a 3 toplamını alırsak a6 = − a 2
a 2 − ia3 = − a 6 − ia7
a12 − ia13 = − a 4 − ia5
Bu iki terimin farkını alırsak a12 = − a 4 toplamını alırsak a13 = a 5
− a12 − ia13 = a 4 − ia 5
a14 − ia15 = − a10 − ia11
Bu iki terimin farkını alırsak a14 = − a10 toplamını alırsak
− a14 − ia15 = a10 − ia11
a15 = a11
bulunur.
Bu sonuçlara göre dA matrisini dokuz bağımsız parametre ile ifade edebiliriz. Yani
a 2 + ia3
a 4 + ia5
ia1
dA = − a 2 + ia3
ia9
a10 + ia11
− a + ia − a + ia
ia17
5
10
11
4
G. Akdeniz, Temel Tanecikler Ders notları, Bölüm IV.3 4. sayfa
Şeklinde ifade edebiliriz. Ayrıca
1 + ia1
det( I + dA) = − a 2 + ia3
− a4 + ia 5
a 2 + ia3
1 + ia9
− a10 + ia11
a 4 + ia5
a10 + ia11 = 1
1 + ia17
(1 + ia9 + ia1 − a1a9 )(1 + ia17 ) = 1
1 + ia17 + ia9 − a17 a9 + ia1 − a1a17 − a1a9 − ia1a9 a17 = 1
ia17 + ia9 + ia1 = 0
⇒ a17 = −a9 − a1
bulunur. Yukarıdaki hesaplarda ai lerin sonsuz küçük olmaları nedeni ile kendi aralarında
çarpımlarının sıfır
alınmıştır. Bu sonuçlada bir parametre daha düşer ve dA matrisini
ia1
dA = − a 2 + ia 3
− a + ia
5
4
a2 + ia 3
ia8
− a6 − ia 7
a4 + ia5
a 6 + ia7
− ia1 − ia8
a9 = a8 , a10 = a6 , a11 = a 7
şeklinde tanımladık.
Daha önce yaptığımız örneklere benzer şekilde
dxi = (dA) ij x j
x1
dx1
dx 2 = (dA) x 2
x
dx
3
3
⇒ dx1 = ia1 x1 + (a 2 + ia 3 ) x 2 + (a 4 + ia5 ) x3
dx 2 = (− a 2 + ia 3 ) x1 + ia8 x 2 + (a 6 + ia7 ) x3
dx3 = (− a 4 + ia 5 ) x1 + (− a 6 + ia 7 ) x 2 + (−ia1 − ia8 ) x3
dxi = u ij da j
dx1 = u11 da1 + u12 da 2 + u13 da 3 + u14 da 4 + u15 da 5 + u16 da 6 + u17 da 7 + u18 da8
dx 2 = u 21 da1 + u 22 da 2 + u 23 da3 + u 24 da 4 + u 25 da5 + u 26 da 6 + u 27 da 7 + u 28 da8
dx3 = u 31 da1 + u 32 da 2 + u 33 da3 + u 34 da 4 + u 35 da5 + u 36 da6 + u 37 da 7 + u 38 da8
⇒ u11 = ix1 , u12 = x 2 , u13 = ix 2 , u14 = x3
u15 = ix3 , u16 = 0, u17 = 0, u18 = 0
u 21 = 0, u 22 = − x1 , u 23 = ix1 , u 24 = 0
u 25 = 0, u 26 = x3 , u 27 = ix3 , u 28 = ix 2
u 31 = −ix3 , u 32 = 0, u 33 = 0, u 34 = − x1
u 35 = ix1 , u 36 = − x 2 , u 37 = ix 2 , u 38 = −ix3
G. Akdeniz, Temel Tanecikler Ders notları, Bölüm IV.3 5. sayfa
olduğundan SU(3) dönüşüm grubunun türev operatörleri aşağıdaki şekilde bulunur.
∂
∂
− ix3
,
∂x1
∂x3
X 2 = x2
∂
∂
− x1
,
∂x1
∂x 2
X 3 = ix2
∂
∂
,
+ ix1
∂x1
∂x2
X 4 = x3
∂
∂
,
− x1
∂x1
∂x3
X 5 = ix3
∂
∂
,
+ ix1
∂x1
∂ x3
X 6 = x3
∂
∂
,
− x2
∂x 2
∂x3
X 7 = ix3
∂
∂
,
+ ix 2
∂x2
∂x3
X 8 = ix2
∂
∂
,
− ix3
∂x2
∂x3
X 1 = ix1
ÖDEV: Benzer şekilde SU(4) grubunun türev operatörlerini bulunuz.
G. Akdeniz, Temel Tanecikler Ders notları, Bölüm IV.3 6. sayfa
BÖLÜM IV
IV.4 SU(2) ve SU(3) SİMETRİ GRUPLARININ MATRİS GÖSTERİMLERİ VE
ÖZELLİKLERİ
SU(2) Gurubunun üç tane jeneratörü vardır. Bunları aşağıdaki şekilde tanımlıyabiliriz.
i
X1 = − 2 σ x
σ x , σ y , σ z Pauli spin matrisleri dir
i
[ A, B ] = AB - BA → Komütatör
X 2 = − σ y
2
A, B = AB + BA → Antikomüta
tör
X3 = − i σ z
2
Bunların bazı özellikleri ise
[
]
b){σ , σ } = 2δ
a) X i , X j = C ijk X k → Daha sonra ispatlanac ak.
i
{σ
1
j
ij
1 , i = j ise
, δ ij =
0 , i ≠ j ise
Dirac
Notasyonu
,σ 2 } = 2δ 12 = 0 dır. Bunu ispatlayalım :
Pauli
0 1
0 − i
1 0
, σ 2 =
, σ 3 =
σ 1 =
1 0
i 0
0 − 1
Sipin
Matrisleri
0 1 0 − i 0 − i 0
+
1 0 i 0 i 0 1
{σ 1 , σ 2 } = σ 1σ 2 + σ 2σ 1 =
{σ
1
, σ 1 } = 2δ 11 = 2 dir.Bunu ispatlayalım.
{σ 1 , σ 1 } = σ 1σ 1 + σ 1σ 1 = σ 2 + σ 2
[
1 i 0 − i 0 0 0
=
+
=
bulunur
0 0 - i 0 i 0 0
]
0 1 0 1
0 1
2
= 2
= 2 I
= 2σ 1 = 2
1
0
1
0
1
0
c) σ i , σ j = 2iε ijk σ k , ε ijk → Levi − Civita
[σ 1 , σ 2 ] = 2iε 12 k
ijk → +1,-1 , iij → 0
= 2i(ε 21σ 1 + ε 122σ 2 + ε 123σ 3 ) = 2iσ 3 dir.Bunu ispatlayal ım
0 1 0 − i 0 − i 0 1
−
1 0 i 0 i 0 1 0
0
1 0
i 0 − i 0 2i
−
=
= 2i
= 2iσ 3 olduğu görülür.
=
0 − i 0 i 0 − 2i
0 − 1
[σ 1 , σ 1 ] = 2iε 11k σ k = 0 ⇒ σ 1 2 − σ 12 = 0 dır.
[σ 1 ,σ 2 ] = σ 1σ 2 − σ 2σ 1 =
d ) Tr (σ k ) = 0 dır.İzlerinin toplam ı yani köşegen elemanları nın toplam ı sıfırdır.
G. Akdeniz, Temel Tanecikler Ders notları, Bölüm IV.4 1. sayfa
e) det (σ k ) = −1
f )σ x = σ y = σ z = I
2
2
2
g ) σ xσ y = −σ yσ x = iσ z , σ yσ z = −σ z σ y , σ xσ z = −σ z σ x
h )Tr (σ iσ j ) = 2δ ij
Tr (σ 1σ 2 ) = 2δ 12 = 0 dır. Bunu ispatlayal ım.
i
Tr σ 1σ 2 = Tr
0
0
= 0 olur.
− i
1
Tr σ 1σ 2 = 2δ 11 = 2 dir. ⇒ Tr σ 1σ 1 = σ 12TrI = 1Tr
0
0
= 2 bulunur.
1
SU(3) grubu : Daha önce gösterdiğimiz gibi 8 tane jeneratörü vardır. Bunlara tekabül
eden matrisler ise aşağıdaki gibidir.
0
0 1 0
λ1 = 1 0 0 , λ 2 = i
0
0 0 0
0
0 0 − i
λ5 = 0 0 0 , λ 6 = 0
0
i 0 0
matrisleri
− i 0
0 0 1
1 0 0
0 0 , λ 3 = 0 − 1 0 , λ 4 = 0 0 0
1 0 0
0 0 0
0 0
Gell Mann
0 0
1 0 0
0 0 0
1
0 1 , λ 7 = 0 0 − i , λ8 =
0 1 0
3
0 i 0
1 0
0 0 − 2
Bu matrisler aşağıdaki şekilde yazıldığında komütasyon ilişkileri ve yapı sabitleri bulunur.
[
]
Fα = 12 λα , Fα , Fβ = if αβγ Fγ
Şimdi λ ların özelliklerini yazıyoruz.Bunlar F içinde geçerlidir.
[
a) λ
[
α
,λ
β
]=
2 if
αβγ
λ
γ
dır.
]
a) λα , λ β = 2if αβγ λγ dır.
[λ1 , λ2 ] = 2if 12γ λγ
= 2i[ f121 λ1 + f122 λ 2 + f 123 λ3 + f 124 λ 4 + f125 λ 5 + f126 λ 6 + f127 λ 7 + f 128 λ8 ]
0 1 0 0 − i 0 0 − i 0 0 1
λ1 λ 2 − λ 2 λ1 = 1 0 0 i 0 0 − i 0 0 1 0
0 0 0 0 0 0 0 0 0 0 0
G. Akdeniz, Temel Tanecikler Ders notları, Bölüm IV.4
0 i 0 0 − i 0 0
0 = 0 − i 0 − 0 i 0
0 0 0 0 0 0 0
2. sayfa
0 0
1 0 0
2i
= 0 − 2i 0 = 2i 0 − 1 0 = 2iλ 3 olur. O halde denklemin iki tarafını eşitleyeli m.
0 0 0
0
0 0
αβγ
123
147
156
246
257
345
367
458
678
f αβγ
1
1/2
–1/2
1/2
1/2
1/2
-1/2
3/2
3/ 2
⇒ f121 = f 122 = f 124 = f125 = f 126 = f 127 = f 128 = 0 dır.
⇒ f123 = 1 dir. ⇒ [λ1 , λ 2 ] = 2if 12γ λγ = 2iλ 3
b){λα , λ β } =
4
δ αβ + 2dαβγ λγ
3
Anti komütasyon ilişkisi ise
{λ1 , λ 4 } = 4 δ 14 + 2d14γ λγ = 2(d 141λ1 + ....... + d148 λ8 )
3
0 1 0 0 0 1 0 0 1 0 1 0 0 0 0 0 0 0 0 0 0
λ1λ 4 + λ 4 λ1 = 1 0 0 0 0 0 + 0 0 0 1 0 0 = 0 0 1 + 0 0 0 = 0 0 1 = λ 6
0 0 0 1 0 0 1 0 0 0 0 0 0 0 0 0 1 0 0 1 0
λ 6 = 2(d141 λ1 + ......... + d148 λ8 )
αβγ
f αβγ
118
1/ 3
146
1/2
1
1
⇒ {λ1 , λ 2 } = 2. λ 6 = λ 6 bulunur.
2
2
{λ1 , λ1 } = 4 δ 11 + 2d11γ λγ = 4 + 2(d 111 λ1 + ....... + d118 λ8 )
3
3
d146 =
157
1/2
228
1/ 3
247
-1/2
256
1/2
338
1/ 3
344
1/2
355
1/2
366
-1/2
377
-1/2
448
-1/ 2 3
G. Akdeniz, Temel Tanecikler Ders notları, Bölüm IV.4 3. sayfa
558
-1/ 2 3
668
-1/ 2 3
λ1 + λ1
2
2
1 0 0 2 0 0
0 1 0 0 1 0
= 2λ1 = 2 1 0 0 1 0 0 = 2 0 1 0 = 0 2 0
0 0 0 0 0 0
0 0 0 0 0 0
2 0 0 4 / 3 0
0
1
⇒ 0 2 0 − 0 4 / 3 0 = d111 λ1 + d112 λ 2 + ........ + d118 λ8
2
0 0 0 0
0 4 / 3
0
1 0 0
1 0 0
1 / 3 0
1
1 1
1
0 = 0 1 0 =
λ8
⇒ 0 1/ 3
0 1 0 =
3
3 3
3
0
0 − 2 / 3
0 0 − 2
0 0 − 2
⇒ d111 = d112 = d113 = d114 = d115 = d116 = d 117 = 0 dır.
d 118 =
Ayrıca bu SU(3) matrisleri aşağıdaki özelliklere sahiptir.
c) Tr( λα ) = 0
d ) Tr( λα λ β ) = 2δ αβ
i 0 0
Tr (λ 4 λ5 ) = Tr 0 0 0 = 0 = 2δ 45 = 0
0 0 − i
Tr (λ3λ3 ) = 2δ 33 = 2 ,
1 0 0
Tr (λ3λ3 ) = Tr 0 1 0 = 2
0 0 0
G. Akdeniz, Temel Tanecikler Ders notları, Bölüm IV.4 4. sayfa
1
3
e) Tr (λα [λ β , λγ ]) = 4if αβγ
Tr (λ3 [λ1 , λ 2 ]) = 4if 312
Tr 2iλ3 λ3 = 4if 312
1 0 0
Tr 2i 0 1 0 = 2i 2 = 4i = 4if 312
0 0 0
0 1 0
0 − i
[λ3 , λ1 ] = 2 − 1 0 0 = 2i i 0
0 0 0
0 0
[λ , λ ] = 2iλ
3
1
2
= 2if 31γ λγ
⇒ f 312 = 1 Bunun sağlamasını yapalım.
0
0 = 2iλ 2
0
Bu işlemleri yaparsak ⇒
f 311 = f 313 = f 314 = f 315 = f 316 = f 317 = f 318 = 0 , f 312 = 1 bulunur.
f) Tr (λα {λ β , λγ }) = 4id αβγ olduğunu göster - 214 için yap.
g) det (λα ) = 0
Ama detλ8 ≠ 0
G. Akdeniz, Temel Tanecikler Ders notları, Bölüm IV.4 5. sayfa
ÖRNEK
iσ yθ
Pauli Spin matrisini göstermek üzere e = ?
matrisini bulunuz.Bu matrisin özdeğer ve özvektörlerini hesaplayınız.
x 2 x3 x 4
+ +
+ .........
2! 3! 4!
ex = 1+ x +
(iσ θ ) (iσ θ ) (iσ θ )
2
e
iσ yθ
= I + iσ yθ +
x = iσ yθ diyelim.
3
+
y
2!
y
3!
4
+
y
4!
+ ............
3
θ 2 I iσ yθ
θ 4I
−
+
+ ..........
2!
3!
4!
θ2 θ4
θ3
= I1 + .......... + iσ y θ − .......
3!
2! 4!
= I + iσ yθ −
= cosθ I + iσ y sin θ I
e
iσ yθ
cosθ
=
0
0 0
+ i
cosθ i sin θ
− i sin θ cosθ
=
0 − sin θ
sin θ
matrisi bulunur.
cosθ
Bu matrisin özdeğer ve özvektörlerini bulalım.
RX = λX ⇒ R − λI = 0
cosθ − λ
sin θ
− sinθ
cosθ − λ
= 0 ⇒ (cosθ − λ ) + sin 2 θ = 0 ⇒ cos 2 θ + λ2 − 2λ cosθ + sin 2 θ = 0
2
⇒ λ2 − 2λ cosθ + 1 = 0 ⇒ λ1, 2 = cosθ ± cos 2 θ − 1
λ1, 2 = cosθ ± − sin 2 θ = cosθ ± i sinθ
Özdeğerler :
λ1 = cosθ + i sinθ
,
λ2 = cosθ − i sin θ
G. Akdeniz, Temel tanecikler Ders notları, Bölüm IV.4 6. sayfa
cosθ − e iθ
λ1 için
− sin θ
− i sin θ
− sin θ
sin θ X 11
=0
cosθ − e iθ X 21
sin θ X 11
= 0 Bu matrisin rangı 1 dir.n = 2 dir.O halde n - 1 = 1 bağımsız cinsinden çözülü
− i sin θ X 21
⇒ −i sin θ X 11 + sin θ X 21 = 0
− sin θ X 11 − i sin θ X 21 = 0
⇒ .i sin θ X 11 = sin θ m ⇒ X 11 = −im
X 21 = m diyelim
− im
+
bunu normlayalım yani X 1 X 1 = 1 olmalıdır.
X 1 =
m
- im
⇒ (im m )
= 1 ⇒ mm + mm = 1
m
⇒ X1 =
1 − i
2 1
,X2 =
m + m = 1⇒ 2m = 1⇒ m =
2
2
1 1
bulunur.
2 1
G. Akdeniz, Temel tanecikler Ders notları, Bölüm IV.4 7. sayfa
2
2
1
1
⇒m=
2
2
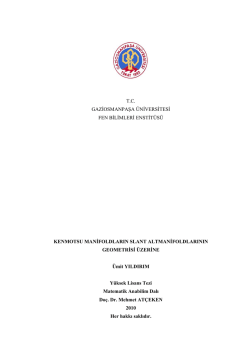
ŞEKİL I. Kuark ve anti kuarklar
Bir kuark ile antisi Y ve I3 ün zıt değerlerine sahip
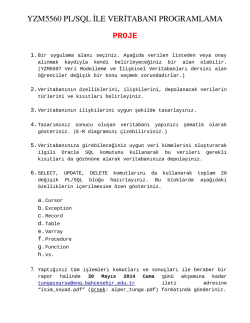
ŞEKİL II spini 3/2 olan baryonların decuplet yapısı
G. Akdeniz, Temel tanecikler Ders notları, Bölüm IV.4 8. sayfa
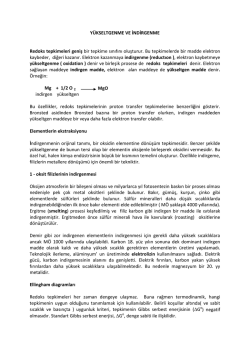
ŞEKİL III spini ½ olan baryonların oktet yapısı
ŞEKİL IV spini 0 olan Mezonların oktet yapısı
mezonlar için B=0 olduğundan
Y=B+S
Y=S
G. Akdeniz, Temel tanecikler Ders notları, Bölüm IV.4 9. sayfa
G. Akdeniz, Temel tanecikler Ders notları, Bölüm IV.4 10. sayfa
IV.5 PROBLEMLER
1
1
ve σz =
0
0
1- σx = 0
1
e
A= σx
i
θ
σ
4
0
Pauli spin matrisleri ve θ serbest bir parametre olmak üzere
− 1
z
matrisini oluşturup, bu matrisin özdeğer ve özvektörlerini bulunuz.
2- σx = 0 1 ve σz = 1
1
0
0
θ
i σ
4
e
A= σx
0
Pauli spin matrisleri ve θ serbest bir parametre olmak üzere
− 1
z
matrisininin özvektörleri olmak üzere bir parçacığın dalga fonksiyonu
ψ =ψ 1 e 2x + ψ 2 e -2x ile verilmektedir. Bu parçacık için a ) ψ + ( σ
3- σx = 0
1
1
ve σz =
0
0
1
A=
e
−i
θ
σ
6
z
σx
i
e
z
θ
σ
6
z
matrisininin özvektörleri olmak üzere bir parçacığın dalga
ψ =ψ 1 sin2x + ψ 2 cos2x ile verilmektedir. Bu parçacık için ψ + ( σ
4- σx = 0 1 ve σz = 1
e
A= σx
0
0
i
θ
σ
6
z
∂
)ψ
∂x
z
matrisininin özvektörleri olmak üzere bir parçacığın dalga fonksiyonu
yoğunluğunu , b) < σx > = ψ + σx ψ
5- σx = 0 1 ve σz = 1
e
− i
z
e
∂
∂
)ψ
−σ z
∂x
∂t
akım
beklenen değer ifadesini hesaplayınız
0
Pauli spin matrisleri ve θ serbest bir parametre olmak üzere
− 1
0
0
θ
σ
2
ifadesini hesaplayınız
0
Pauli spin matrisleri ve θ serbest bir parametre olmak üzere
− 1
ψ =ψ 1 e (2x+it) + ψ 2 e -(2x+it) ile verilmektedir. Bu parçacık için a ) ψ +( σx
1
ifadesini hesaplayınız
0
Pauli spin matrisleri ve θ serbest bir parametre olmak üzere
− 1
fonksiyonu
1
∂
)ψ
∂x
i
θ
σ
2
z
σx
matrisininin özvektörleri olmak üzere bir parçacığın dalga
fonksiyonu ψ =c1 ψ 1 + c2 ψ 2 ile verilmektedir. Bu parçacık için ; < σx > = ψ + σx ψ ve < σx > = ψ +
σx ψ beklenen değer ifadelerini hesaplayınız
A=
6-σ1 = 0 1 ve σ2 = 1
0 Pauli spin matrisleri ve θ serbest bir parametredir. ψ ve ψ
1
2
0
−1
1 0
A=
e
i
θ
σ
2
2
σ1
e
−i
θ
σ
2
2
matrisininin özvektörleri olmak üzere bir parçacığın dalga fonksiyonu
G. Akdeniz, Temel tanecikler Ders notları, Bölüm IV.5 1. sayfa
ψ =ψ 1 e (x+it) + ψ 2 e -(x+it) ile verilmektedir. Bu parçacık için a ) ψ+( σ1 ∂ − σ 2 ∂ ) ψ
∂t
akım
∂x
b) < σ1 > + < σ2 > beklenen değer ifadesini hesaplayınız. ( Burada < σ i > = ψ + σi ψ
yoğunluğunu ,
dir.)
7-σ1 = 1
0 ve σ = 0 1 Pauli spin matrisleri ve θ serbest bir parametredir. ψ ve ψ
2
1
2
0 −1
1 0
e
i
θ
σ
2
A=
2
matrisininin özvektörleri olmak üzere bir parçacığın dalga fonksiyonu ψ =ψ 1 Sin ( x -t) +
ψ 2 Cos ( x - t ) ile verilmektedir. Bu parçacık için < σ1 > + < σ2 > beklenen değer ifadesini
hesaplayınız.
( Burada < σ i > = ψ + σi ψ dir.)
8-σ1 = 0 1 ve σ2 = 1
0 Pauli spin matrisleri ve θ serbest bir parametredir. ψ ve ψ
1
2
0 −1
1 0
A=
e
θ
i σ1
2
e
θ
−i σ 2
2
matrisininin özvektörleri olmak üzere bir parçacığın dalga fonksiyonu
ψ =ψ 1 Sin (x-it) + ψ 2 Cos ( x-it ) ile verilmektedir. Bu parçacık için < σ 1> = ψ + σ1 ψ beklenen
değer ifadesini hesaplayınız.
9-σx = 0 1 ve σz = 1
0 Pauli spin matrisleri ve θ serbest bir parametredir. ψ ve ψ
1
2
0
−1
1 0
A= σx
e
i
θ
σ
6
z
matrisininin özvektörleri olmak üzere bir parçacığın dalga fonksiyonu
ψ =ψ 1 e( 2x +it) + ψ 2 e - ( 2x +it) ile verilmektedir. Bu parçacık için ψ + ( σx ∂/∂t - σz ∂/∂x) ψ akım
yoğunluğu ifadesini hesaplayınız.
10-σ1 = 0 1 ve σ2 = 1
1 0
σ1
e
θ
i σ
2
2
0 Pauli spin matrisleri ve θ serbest bir parametredir. ψ ve ψ
1
2
0 −1
A=
matrisininin özvektörleri olmak üzere bir parçacığın dalga fonksiyonu ψ =ψ 1 Sin ( x -
2t) + ψ 2 Cos ( x + 2 t ) ile verilmektedir. Bu parçacık için a ) ψ +( σ1 ∂ − σ 2 ∂ ) ψ
∂t
∂x
akım
yoğunluğunu ,
b) < σ1 > + < σ2 > beklenen değer ifadesini hesaplayınız. ( Burada < σ i > = ψ + σi ψ dir.)
G. Akdeniz, Temel tanecikler Ders notları, Bölüm IV.5 2. sayfa
11- σ1 = 1
0 ve σ = 0 1 Pauli spin matrisleri ve θ serbest bir parametredir. ψ ve ψ
2
1
2
0 −1
1 0
e
i
θ
σ1
4
A=
matrisininin özvektörleri olmak üzere bir parçacığın dalga fonksiyonu ψ =ψ 1 Sin ( 2x - 3t)
+ ψ 2 Cos ( 2x - 3 t ) ile verilmektedir. Bu parçacık için a ) ψ +( σ1 ∂ − σ 2 ∂ ) ψ
∂t
∂x
akım
yoğunluğunu ,
b) < σ1 > + < σ2 > beklenen değer ifadesini hesaplayınız. ( Burada < σ i > = ψ + σi ψ dir.)
2 ve D = 2
0
0
12-C = 0
2
A= C
e
i
θ
D
8
0
− 2
matrisleri ve θ serbest bir parametre olmak üzere
matrisini oluşturup, bu matrisin özdeğer ve özvektörlerini bulunuz.
13-σ1 = 1
0 ve σ = 0 1 Pauli spin matrisleri ve θ serbest bir parametredir. ψ ve ψ
2
1
2
0 −1
1 0
e
i
θ
σ1
2
A=
matrisininin özvektörleri olmak üzere bir parçacığın dalga fonksiyonu ψ =ψ 1 Sin ( 2x -t) +
ψ 2 Cos ( 2x - t ) ile verilmektedir. Bu parçacık için < σ1 > beklenen değer ifadesini hesaplayınız. (
Burada < σ1> = ψ + σ1 ψ dir.)
G. Akdeniz, Temel tanecikler Ders notları, Bölüm IV.5 3. sayfa
BÖLÜM V
V.1 FEYNMAN KURALLARI
Bozunum oranları ve saçılma tesir kesitlerini hesaplamak için M amplitünden yararlanıyoruz.
1 ) Gelen ve giden parçacıkların 4’lü momentumu p1 , p 2 ,.... p n olsun ve ara parçacığın 4’lü
momentumları q1 , q 2 ,..., q n olsun. Her bir çizgiye, pozitif doğrultuyu belirlemek için ok
yerleştiriyoruz.
P2
q
P2
2 ) Her bir vertexiçin (-ig) şeklinde bir faktör yazacağız. g=bağlanma sabiti.
3 ) Her bir ara(iç) çizgi için
i
şeklinde bir faktör yazacağız.
q − mi2 c 2
2
i
4 )Enerji ve momentum korunumu= Her bir vertex için bir delta fonksiyonu katsayısı
yazacağız.
(2π ) δ (k
4
4
1
gelen +
giden −
m k2 m k3 )
d 4q
5 ) Ara momentumlar üzerinden integral alınacak. Her bir ara çizgi için
şeklinde bir
(2π )4
katsayı yazılacak ve bütün ara momentumlar için integre edilecek.
4
4
6 ) Delta fonksiyonu ihmali. (2π ) δ ( p1 + p2 + ... + p n ) Bu terimi yok edip geriye kalan
terime –iM diyeceğiz.
KUANTUM ELEKTRO DİNAMİĞİ (QED) İÇİN FEYNMAN KURALLARI
1 ) Notasyon: Gelen ve giden parçacıkların 4’lü momentumları p1 , p 2 ,.., p n ve sipinleri
s1 , s2 ,.., s n olsun. Ara parçacıkların momentumları q1 , q 2 ,.., q n olsun. Akış diyagramımızın
doğrultusunu belirleyip okları yerleştiriyoruz.
Elektron
*
u
gelen
*
u
giden
*
v
gelen
*
v
gidiş
*
ε µ geliş
Pozitron
Photon
•
ε gidiş
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm V.I. 1.sayfa
µ*
3 ) Vertex faktörleri: Her bir vertex için ig eγ
g e = e 4π
hc
µ
şeklinde bir faktör yazıcağız.
= 4πα
4 ) propagatör: Her bir ara çizgi için bir faktör yazacağız.
−
e veya pozitron
i (γ µ q µ + mc )
q 2 − m2c2
,
photon −
ig µν
q2
5 ) Enerji ve momentum korunumu: Her bir vertex için bir delta fonksiyonu yazacağız.
(2π )4 δ 4 (k1 m k 2 m k3 ) (geliş +, gidiş -)
d 4q
6 ) Her bir ara parçacık için momentum
şeklinde bir faktör olacak ve integre edilecek.
(2π )4
7 ) Delta fonksiyonu yok edilecek.
(2π )4 δ 4 ( p1 + p2 +, ,+ pn ) Geriye kalana –iM denilecek.
8 ) Antisymmetrization: Gelen veya giden parçacıkların yerlerini değiştirisek yani 2. bir şekil
varsa, ikinci şekilde çizilecek ve M amplitüdüne (-) ilave edilkecek.
KUANTUM CHROMODYNAMİCS(QCD) İÇİN FEYNMAN DİAGRAMLARI
1 ) Dış çizgiler: momentumu p, spini s ve rengi c olan
Quark
*
gelen
*
u ( s ) ( p ).c + giden
*
v ( p ).c +
gelen
*
v( p ).c
gidiş
*
ε µ ( p )cα geliş
Antiquark
Gluon
u ( s ) ( p ).c
ε µ * ( p ).c α * gidiş
*
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm V.I. 2.sayfa
0
0
1
c: quarkın rengi ; 0 kırmızı, 1 mavi, 0 yeşil,
1
0
0
2 ) propagatör: Ara parçacık;
i(q + mc )
quark-anti quark için 2
q − m2c 2
gluon için −
ig µν δ αβ
q2
dir.
3 ) vertex katkısı
−
ig s α β
λγ
2
λ , Gell Mann Matrisleri
ZAYIF ETKİLEŞME İÇİN FEYNMAN KURALLARI
−
1 ) Propagatör: (W, Z)
q 2 〈〈 (Mc ) ⇒ −
2
i (g µν − q µ qν / m 2 c 2 )
q 2 − M 2c 2
ig µν
(Mc )
2
2 ) Vertex faktör
ig w µ
γ (1 − γ 5 )
2 2
g w = 4πα w
Zayıf bağlanma sabiti.
−
ÖNEMLİ NOKTALAR
1 ) Kuark yapı (sdu)’ların yanında rengi gösteren c’lerin olması lazım.
2 ) Kuarklarda açılarda hesaba katılır. D girip u çıkarsa Cos, s girip u çıkarsa Sin oluyor.
3 ) Kuark varsa zayıf etkileşme, yoksa EMT etkileşme. Elektromagnetik etkileşmede
e − veyaγ ara parçacıktır.
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm V.I. 3.sayfa
Feynman Diagramlarında Kullanılan Tablo
u
Vertex katkısı : -
ig w µ
γ (1 − γ 5 ) Sin θ c
2 2
Vertex katkısı : -
ig w µ
γ (1 − γ 5 ) Cos θ c
2 2
s
u
d
Zo için Vertex katkısı :
− ig z µ f
γ (cv − c Af γ 5 )
2
f
νe , νµ , ντ
cv
CA
e- , µ- , τ -
1
2
- 1 + 2 Sinθw
1
2
-1
2
1
2
2
u,c,t
1 4
− Sin 2θ w
2 3
d,s,b
−
Propagator W± , Zo için
:
-1
1 2
+ Sin 2θ w
2 3
ig µν
(Mc)
2
2
(
q2 << (Mc)2 için )
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm V. 2. Ek I
BÖLÜM V
V.2 FEYNMAN DİAGRAMLARI UYGULAMALARI
1 ) π → e + υ e için Feynman diagramını çizip, bu diagrama göre M
amplitüdünü(genliğini) yazınız.
−
−
ig µϑ
ig
− iM = U (3)C3+ − w γ µ (1 − γ 5 )Cosθ c U (1)C1
2
2 2
(Mc )
ig w ϑ
γ (1 − γ 5 )U (2 )
U
(
)
4
−
2 2
ig w2
− iM = −
[U (3)C3+γ µ (1 − γ 5 )Cosθ cU (1)C1 ][U (4)γ µ (1 − γ 5 )U (2)]
2
8(Mc )
2
gw
M=
[U (3)C3+γ µ (1 − γ 5 )Cosθ cU (1)C1 ][U (4)γ µ (1 − γ 5 )U (2)]
2
8(Mc )
2 ) ν µ + e → µ + ν e için Feynman diagramını çizip, bu diagrama göre M
−
−
amplitüdünü(genliğini) yazınız.
ig
ig
− iM = U (3) − w γ µ (1 − γ 5 )U (1) µν 2
2 2
(Mc )
ig w ϑ
5
U
(
4
)
−
γ
(
1
−
γ
)
U
(
2
)
2 2
ig w2
− iM = −
[U (3)(γ µ (1 − γ 5 ))U (1)][U (4)γ µ (1 − γ 5 )U (2)]
2
8(Mc )
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm V.2 1.sayfa
g w2
M=
[U (3)(γ µ (1 − γ 5 ))U (1)][U (4)γ µ (1 − γ 5 )U (2)]
2
8(Mc )
3 ) Çift oluşumu; γ + γ → e + e için Feynman diagramını çizip, bu diagrama göre
M amplitüdünü(genliğini) yazınız.
EMT etkileşme olduğu için ikinci bir şekil daha var.
+
− iM = [ε (1)ig eγ V (3)]
µ
µ
(2π ) δ ( p
4
4
2
−
i (γ µ q µ + mc )
q −m c
2
2
2
[ε (2)ig γ V (4)](2π ) δ ( p
µ
ν
4
4
e
1
− p3 + q )
− p4 − q )
δ 4 lü terimi integre edelim...
i (γ µ q µ + mc )
d 4q
4
4
4
4
∫ q 2 − m 2 c 2 (2π ) δ ( p1 − p3 + q )(2π ) δ ( p2 − p4 − q ) (2π )4
buradan q = p3 − p1 bulunur..
i (γ µ q µ + mc )
µ
µ
− iM = [ε (1)ig eγ V (3)]
[ε µ (2)ig eγ ν V (4)]
2
2 2
( p3 − p1 ) − m c
− iM = −
M=
ig e2 (γ µ q µ + mc )
(p
− p1 ) − m c
2
3
2
g e2 (γ µ q µ + mc )
(p
− p1 ) − m c
2
3
2
µ
µ
ν
e
[ε (1)γ V (3)][ε (2)ig γ V (4)]
µ
2
[ε (1)γ V (3)][ε (2)ig γ V (4)]
µ
2
µ
µ
ν
e
4 ) ∧ (uds ) → p (uud ) + π (u d ) için Feynman diagramını çizip, bu diagrama göre M
amplitüdünü(genliğini) yazınız.
0
−
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm V.2 2.sayfa
ig
ig
− iM = U (3)C3+ − w γ µ (1 − γ 5 )Sinθ c U (1)C1 µϑ 2
2 2
(Mc )
ig w ν
+
5
(
)
(
)
(
)
U
4
C
−
γ
1
−
γ
Cos
θ
U
2
C
4
c
2
2 2
2
ig w
− iM = −
[U (3)C3+ (γ µ (1 − γ 5 )Sinθ c )U (1)C1 ][U (4)C4+γ µ (1 − γ 5 )Cosθ cU (2)C2 ]
2
8(Mc )
5 ) e + e → u + u Zayıf etkileşmesi için Feynman diagramını çizip, bu diagrama göre M
amplitüdünü(genliğini) yazınız.
+
−
ig µϑ
ig
− iM = V (3) − z γ µ (cνf − c Af γ 5 )U (1)
2
2
(Mc )
ig z ν f
f
+
5
γ
γ
U
4
C
c
c
V
2
C
2
(
)
(
)
(
)
(
)
−
−
ν
A
4
2
g z2
− iM = −i
[V (3)(γ µ (cνf − c Af γ 5 ))U (1)][U (4)C4+γ µ (cνf − c Af γ 5 )V (2)C (2)]
2
4(Mc )
g z2
[V (3)(γ µ (cνf − c Af γ 5 ))U (1)][U (4)C4+γ µ (cνf − c Af γ 5 )V (2)C (2)]
M=
2
4(Mc )
6 ) ∆ (udd ) → p (uud ) + π (u d ) için Feynman diagramını çizip, bu diagrama göre M
amplitüdünü(genliğini) yazınız.
0
−
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm V.2 3.sayfa
ig µν
ig
− iM = U (3)C3+ − w γ µ (1 − γ 5 )Sinθ c U (1)C1
2
2 2
(Mc )
ig w ν
+
5
U (4 )C 4 − 2 2 γ (1 − γ )Cosθ cV (2 )C 2
ig w2
− iM = −
[U (3)C3+ (γ µ (1 − γ 5 )Sinθ c )U (1)C1 ][U (4)C4+γ µ (1 − γ 5 )Cosθ cV (2)C2 ]
2
8(Mc )
g w2
M=
[U (3)C3+ (γ µ (1 − γ 5 )Sinθ c )U (1)C1 ][U (4)C4+γ µ (1 − γ 5 )Cosθ cV (2)C2 ]
2
8(Mc )
7)
ν µ + e − → ν µ + e − Zayıf etkileşmesi için Feynman diagramını çizip, bu diagrama
göre M amplitüdünü(genliğini) yazınız.
ig
ig
ig
− iM = U (3) − z γ µ (cνf − c Af γ 5 )U (1) µν 2 U (4 ) − z γ ν (cνf − c Af γ 5 )U (2 )
2
2
(Mc )
2
ig z
− iM = −
[U (3)(γ µ (cνf − c Af γ 5 ))U (1)][U (4)γ µ (cνf − c Af γ 5 )U (2)]
2
4(Mc )
g z2
[U (3)(γ µ (cνf − c Af γ 5 ))U (1)][U (4)γ µ (cνf − c Af γ 5 )U (2)]
M=
2
4(Mc )
8 ) Aşağıdaki Feynman diagramı için etkileşme ifadesini yazıp, Feynman diagramına göre M
amplitüdünü(genliğini) yazınız.
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm V.2 4.sayfa
− iM = [ε
µ*
e
(2π ) δ ( p
4
∫
(3)ig γ
4
2
µ
U (1)]
i (γ µ q µ + mc )
q −m c
2
2
[ε (4)ig γ V (2)](2π ) δ ( p
µ*
ν
4
4
e
2
1
− q − p3 )
+ q − p4 )
i (γ µ q µ + mc )
q 2 − m2c2
d 4q
(2π ) δ ( p1 − q − p3 )(2π ) δ ( p2 + q − p4 ) 4
(2π )
4
4
4
4
q = p 4 − p2
− iM = −
M=
ig e2 (γ µ q µ + mc )
(p
− p2 ) − m c
2
4
2
g e2 (γ µ q µ + mc )
(p
− p2 ) − m c
2
4
2
µ
µ*
ν
[ε (3)γ U (1)][ε (4)γ V (2)]
µ*
2
[ε (3)γ U (1)][ε (4)γ V (2)]
µ*
2
µ
µ*
ν
9 ) n(udd ) → p (uud ) + e + ν e için Feynman diagramını çizip, bu diagrama göre M
amplitüdünü(genliğini) yazınız.
−
ig µν
ig
ig
− iM = U (3)C3+ − w γ µ (1 − γ 5 )Cosθ c U (1)C1
U (4 ) − w γ θ (1 − γ 5 )U (2 )
2
2 2
2 2
(Mc )
ig w2
− iM = −
[U (3)C3+ (γ µ (1 − γ 5 )Cosθ c )U (1)C1 ][U (4)γ θ (1 − γ 5 )U (2)]
2
8(Mc )
g w2
M=
[U (3)C3+ (γ µ (1 − γ 5 )Cosθ c )U (1)C1 ][U (4)γ θ (1 − γ 5 )U (2)]
2
8(Mc )
10 ) e + e → e + e için Feynman diagramını çizip, bu diagrama göre M
amplitüdünü(genliğini) yazınız.
+
−
+
−
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm V.2 5.sayfa
− iM = [U (3)ig eγ U (1)]
µ
(2π ) δ ( p
4
∫
4
i (γ µ q µ + mc )
q 2 − m2c2
q = p1 − p3
1
2
4
4
(p
− p3 ) − m c
2
2
g e2 (γ µ q µ + mc )
(p
2
ν
4
4
e
1
− q − p3 )
d 4q
(2π ) δ ( p1 − q − p3 )(2π ) δ ( p4 + q − p2 ) 4
(2π )
4
ig e2 (γ µ q µ + mc )
1
M=
q −m c
2
[V (4)ig γ V (2)](2π ) δ ( p
+ q − p2 )
4
− iM = −
i (γ µ q µ + mc )
− p3 ) − m c
2
2
2
[U (3)γ U (1)][V (4)γ V (2)]
µ
ν
[U (3)γ U (1)][V (4)γ V (2)]
µ
2
4
ν
11 ) e + e → d + d için Feynman diagramını çizip, bu diagrama göre M
amplitüdünü(genliğini) yazınız.
+
−
ig
ig
ig
− iM = V (3) − z γ µ (cνf − c Af γ 5 )U (1) µν 2 U (4 )C 4+ − z γ ν (cνf − c Af γ 5 )U (2 )C (2 )
2
2
(Mc )
ig z2
− iM = −
[V (3)(γ µ (cνf − c Af γ 5 ))U (1)][U (4)C4+γ ν (cνf − c Af γ 5 )U (2)C (2)]
2
4(Mc )
g z2
[V (3)(γ µ (cνf − c Af γ 5 ))U (1)][U (4)C4+γ ν (cνf − c Af γ 5 )U (2)C (2)]
M=
2
4(Mc )
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm V.2 6.sayfa
KUANTUM ELEKTRO DİNAMİĞİ (QED) İÇİN FEYNMAN KURALLARI
Feynman kurallarını kullanarak amplititünü (M) bulabiliriz. Bozunum oranlarını ve saçılım
tesir kesitlerini hesaplamak için M kullanılır.
e− + µ → e− + µ
ÖRNEK 1:
İlk önce, QED’nin 1. kuralı gereği; gelen ve giden parçacıkların 4’lü momentumları
Sırası ile p , p , p , p olsun. Ara parçacığımız foton ( γ ) dur ve 4’lü momentumu q
1 2 3 4
olarak gösterilir.
Feynman diyagramını çizmek için vertex noktalarına gelen ve giden parçacıklar yerleştirilir.
Her parçacık kendi türünden parçacıkla eşleşir. Bu sebeple
1. vertex noktasına gelen ve giden parçacıklar elektronlardır.
2. vertex noktasına gelen ve giden parçacıklar ise müonlardır.
Feynman diyagramına U(1), U(2), U(3) ve U(4) parçacıkları sırasına göre yerleştirilir. U(3) ve
U(4) vertexten çıkanları gösterdiği için üzerleri çizgilidir.
Bunları belirttikten sonra şeklimizi aşağıdaki gibi çizebiliriz.
Şimdi sırasıyla kurallarını kullanarak Amplititüd(M) değeri belirlenebilir.
[
]
µ
1. vertex için U (3)(ig eγ )U (1) yazılır. Buradaki (ig e γ µ ) vertex faktörüdür.
Sonra propagatör(taşıyıcı) katkısı yazılır. Ara parçacığımız foton olduğu için QED
Feynman kurallarından ( −
ig
µν
) yazılır. (ara parçacığı belirlerken vertexe gelen ve giden
2
q
parçacıkları dikkate alarak, vertexde yük korunumuna bakılır. Bu örnekte yük korunumunu
sağlamak için ara parçacığın foton olması gerekir.)
2. vertex için
[U (4)(ig γ
e
ν
)U ( 2)
] yazılır. Vertex faktöründe ν indisi yazılır.
Enerji momentum korunumu için her bir vertexe ait bir delta fonksiyonu yazılır.
(2π ) 4 δ 4 ( p1 − p3 − q) ve (2π ) 4 δ 4 ( p2 + q − p4 ) bu fonksiyonlarda Feynman
kurallarına uygu olarak yazılır.
Son olarak ara parçacık üzerinden integre edilir. ∫
1
(2π )
4
d 4q
Yazılanların hepsini birleştirirsek:
G. Akdeniz, Temel tanecikler Ders notları, Bölüm V.2 7. sayfa
ig µν
U (3)(ig eγ )U (1) −
q2
[
]
µ
(2π ) 4 δ 4 ( p2 + q − p4 ) ∫
1
(2π )
4
U (4)(ig γ ν )U (2) (2π ) 4 δ 4 ( p − p − q)
e
1
3
[
]
d 4q
enerji-momentum korunumundan yararlanarak, ikinci vertex noktasında q = p4 −
yazılabilir. Böylece denklemimizde delta fonksiyonları yok olur ve kalan –iM’ ye
eşitlenir.
ig µν
− iM = U (3)(ig eγ )U (1) −
q2
g γ ν = γ µ olur.
[
µ
]
U ( 4)(ig γ ν )U ( 2)
e
[
p2
]
µν
M =−
( ge )2
( p4 − p2 )
2
[U (3)(γ
µ
][
)U (1) U ( 4)(γ µ )U (2)
] bulunur.
ÖRNEK 2: e − + e + → e − + e +
İlk önce 1. kuralımız gereği; gelen ve giden parçacıkların 4’lü momentumları
Sırası ile p , p , p , p olsun. Ara parçacığımız foton ( γ ) dur ve 4’lü momentumu q
1 2 3 4
olarak gösterilir.
Feynman diyagramını çizmek için vertex noktalarına gelen ve giden parçacıklar yerleştirilir.
Her parçacık kendi türünden parçacıkla eşleşir. Bu sebeple
1. vertex noktasına gelen ve giden parçacıklar elektronlardır.
2. vertex noktamıza gelen ve giden parçacıklar ise pozitronlardır.
Feynman diyagramına U(1), V(2), U(3) ve V(4) parçacıkları sırasına göre yerleştirilir. U(3) ve
V(4) vertexten çıkanları gösterdiği için üzerleri çizgilidir.
Bunları belirttikten sonra şekil aşağıdaki gibi çizilebilir.
G. Akdeniz, Temel tanecikler Ders notları, Bölüm V.2 8. sayfa
Şimdi sırasıyla kuralları kullanarak denklem oluşturulur.
1. vertex için U (3)(ig e γ µ )U (1) yazılır. Buradaki (ig e γ µ ) vertex faktörüdür.
Sonra propagatör(taşıyıcı) katksı yazılır. Ara parçacığımız foton olduğu için Feynman
kurallarından( −
ig
µν
) yazılır. Bu örnekte yük korunumunu sağlamak için ara parçacığın
2
q
foton olması gerekir.
V ( 4)(ig eγ ν )V ( 2)
2. vertex için
yazılır. Vertex faktöründe indis olarak ν yazılır.
Enerji momentum korunumu için her bir vertexe ait bir delta fonksiyonu yazılır.
(2π ) 4 δ 4 ( p1 − p3 − q) ve (2π ) 4 δ 4 ( p2 + q − p4 ) bu fonksiyonlar kurallara
uygun olarak yazılmalıdır.
Son olarak ara parçacık üzerinden integre edilir. ∫
1
( 2π ) 4
d 4q
Yazılanların hepsini birleştirirsek:
ig µν
U (3)(ig eγ )U (1) −
q2
[
]
µ
(2π ) 4 δ 4 ( p2 + q − p4 ) ∫
1
(2π ) 4
V (4)(ig γ ν )V (2) ( 2π ) 4 δ 4 ( p − p − q )
e
1
3
[
]
d 4q
enerji-momentum korunumundan yararlanarak ikinci vertex noktasında q = p4 − p2
yazılabilir. Denklemimizde delta fonksiyonları yok edilir ve kalan –iM’ ye eşitlenir.
ig µν
− iM = U (3)(ig eγ )U (1) −
q2
ν
g γ = γ µ olur.
[
µ
]
V (4)(ig γ ν )V (2)
e
[
]
µν
M =−
( ge )2
( p4 − p2 )
2
[U (3)(γ
µ
][
)U (1) V (4)(γ µ )V (2)
] bulunur.
G. Akdeniz, Temel tanecikler Ders notları, Bölüm V.2 9. sayfa
ÖRNEK 3. e − + e − → e − + e −
ilk iki örnekte olduğu gibi bütün işlemler tekrarlanır. Fakat burada iki farklı eşleşme
olması mümkündür. Bu durumlarda her iki eşleşme için M1 ve M2 bulunur. M= M1+M2
olur. Bu örnekte yük korunumunu sağlamak için ara parçacığın foton olması gerekir.
[U (3)(ig γ )U (1)] − igq [U (4)(ig γ )U (2)](2π ) δ (p1 − p3 − q )
µ
e
(2π )4 δ 4 (p2 + q − p4 )∫
µν
2
ν
1
(2π )4
4
e
d 4q
q = p1 − p3 ve g µν γ ν = γ µ yazılabilir.
M1 = −
( g e )2
( p1 − p3 )
2
[U (3)(γ )U (1)][U (4)(γ )U (2)]
µ
µ
Olur.
M2 için:
G. Akdeniz, Temel tanecikler Ders notları, Bölüm V.2 10. sayfa
4
[U (4)(ig γ )U (1)] − igq [U (3)(ig γ )U (2)](2π ) δ (p1 − p4 − q )
µν
2
µ
e
(2π )4 δ 4 ( p2 + q − p3 )∫
ν
1
(2π )4
4
4
e
d 4q
q = p1 − p 4 ve g µν γ ν = γ µ yazılabilir.
M2 = −
( g e )2
( p1 − p4 )
2
[U (4)(γ )U (1)][U (3)(γ )U (2)]
µ
µ
olarak bulunur.
KUANTUM CHROMO DİNAMİĞİ (QCD) İÇİN FEYNMAN
KURALLARI
ÖRNEK 1. u + d → u + d
P(momentum), S(spin), C(renk) olmak üzere bütün dış çizgileri belirterek diyagramımız
aşağıdaki gibi yazılır. Aynı türden parçacıklar eşleştirilerek vertex noktalarında birleştirilir.
Ara parçacığımız gluondur. Anti-kuarklar V ile gösterilir. U(3) ile V(2) ve bunların renk
faktörleri C(3) ile C(2) vertexten çıkan olduğu için üzerleri çizgilidir.
1. vertex için
+ ig s α µ
U
(
3
)
C
−
λ
γ
U
(
1
)
C
3
1
2
Propagatör(taşıyıcı) için ara parçacığımız gluon olduğundan
yazılır.
ig µν δ
−
q2
αβ
katkısı yazılır. Bu örnekte yük korunumunu sağlamak için ara parçacığın gluon olması
gerekir.
G. Akdeniz, Temel tanecikler Ders notları, Bölüm V.2 11. sayfa
2. vertex için
+ ig s β ν
−
λ
γ
V
(
2
)
C
V
(
4
)
C
2
4 yazılır.
2
QED olduğu gibi enerji-momentum korunumu için her bir vertexe ait birer delta
fonksiyonu yazılıp, sonra yok edilerek kalan ifade –iM’ye eşitlenir.
αβ
ig µν δ
+ ig s α µ
− iM = U (3)C3 −
λ γ U (1)C1 −
2
q2
+ ig s β ν
V
(
2
)
C
λ γ V (4)C4
2 −
2
g µν γ ν = γ µ yazılabilir. Ve gerekli düzenlemeler yapıldığında denklem şu hale
gelir.
M
( g s )2 [U (3) µU (1)][V (2) V (4)][C + α C ][C + α C ]
=−
γ
γµ
3λ
1
2λ
4
2
(2q )
Sonra
f =
[
][
]
1 + α
C3 λ C1 C2+ λα C4 olarak tanımlanır ve değeri bulunur.
4
1
Burada renklerimiz C1 ve C3 kırmızı olsun yani C1 = C3 = 0
0
0
C2 ve C4 mavi olsun yani C 2 = C 4 = 1 olur.
0
Bunları f de yerine koyarsak.
1
0
1 α α
1
f = (1 0 0 )λα 0 (0 1 0)λα 1 = λ11
λ22
4
4
0
0
burada birinci kare
parantezde, birinci satır birinci sütunu 1 olan bir matris çıkar. İkinci kare parantezde ise ikinci
satır ikinci sütunu 1 olan bir matris çıkar. λ ’lar Gell-Man Matrisleridir. Bu matrislerin
değerleri yerine konulursa sonuç aşağıdaki gibi olur.
G. Akdeniz, Temel tanecikler Ders notları, Bölüm V.2 12. sayfa
f =
[
]
1 3 3
1
1 1
1
8 8
λ11λ22 + λ11
λ22 = (1)(−1) + ( )( ) = −
4
4
6
3
3
ÖRNEK 2. u + d → u + d
P(momentum), S(spin), C(renk) olmak üzere bütün dış çizgileri belirterek diyagramımız
aşağıdaki gibi yazılır. Aynı parçacıklar eşleştirilerek vertex noktalarında birleştirilir. Ara
parçacığımız gluondur. U(3) ile U(4) ve bunların renk faktörleri C3 ile C4 vertexten çıkan
olduğu için üzerleri çizgilidir.
1. vertex için
+ ig s α µ
U
(
3
)
C
−
λ
γ
U
(
1
)
C
3
1
2
yazılır.
Propagatör(taşıyıcı) için ara parçacığımız gluon olduğundan
ig µν δ αβ
katkısı yazılır. Bu örnekte yük korunumunu sağlamak için ara
−
2
q
parçacığın gluon olması gerekir.
2. vertex için
+ ig s β ν
U
(
4
)
C
−
U
(
2
)
C
λ
γ
4
2
2
yazılır.
QED olduğu gibi enerji-momentum korunumu için her vertex için bir delta fonksiyonu
yazılır ve sonra yok edilerek kalan ifade –iM’ye eşitlenir.
αβ
ig µν δ
+ ig s α µ
− iM = U (3)C3 −
λ γ U (1)C1 −
2
q2
+ ig s β ν
U
(
4
)
C
λ γ
4 −
2
U ( 2)C 2
g µν γ ν = γ µ yazılabilir. Ve gerekli düzenlemeler yapıldığında denklem şu hale
gelir.
G. Akdeniz, Temel tanecikler Ders notları, Bölüm V.2 13. sayfa
M
( g s )2 [U (3) µU (1)][U (4) U (2)][C + α C ][C + α C ]
=−
γ
γµ
3λ
1
4λ
2
2
(2q )
f =
Sonra
[
][
]
1 + α
C3 λ C1 C4+ λα C2 olarak tanımlanır ve değeri bulunur.
4
Burada renklerimizC1,C2, C3 ve C4 kırmızı olsun yani
1
C1 = C2 = C3 = C4 = 0 olur.
0
Bunları f de yerine koyarsak.
1
1
1
1
α
f = (1 0 0 )λα 0 (1 0 0)λα 0 = λα11λ11
4
0 4
0
burada birinci kare
parantezde, birinci satır birinci sütunu 1 olan bir matris çıkar. İkinci kare parantezde ise
birinci satır birinci sütunu 1 olan bir matris çıkar. λ ’lar Gell-Man Matrisleridir.
f =
[
]
1 3 3
1
1 1 1
8 8
λ11λ11 + λ11
λ11 = (1)(1) + ( )( ) =
4
4
3 3 3
ÖRNEK 3.
u+u → g + g
Bu etkileşme üç farklı şekilde olabilir. Her bir şekli bir önceki sorularda yapıldığı biçimde
aşağıdaki şekilde çizilebilir.
1. şekil:
M1 için:
G. Akdeniz, Temel tanecikler Ders notları, Bölüm V.2 14. sayfa
Notasyonları uygun şekilde yerleştirerek diyagram çizilebilir. Bu durumda ara parçacığımız
quarktır. Çünkü vertexe giren ve çıkan parçacıkların yükleri ancak bu şekilde eşitlenebilir.
1. vertex için;
+ ig s β ν ∗
β∗
−
∈
V
(
2
)
C
λ
γ
a
2
4
4
2
2. vertex için;
∗ α ∗ ig s α µ
∈
−
λ
γ
a
U
(
1
)
C
1
3 3
2
Propagatör için;
ν
µ
i(q + mc )
2
2 2
q − m c
yazılır.
yazılır.
yazılır.
Enerji momentum korunumu için delta fonksiyonları tanımlanıp, yok edilirse ve kalan
terim
–iM’ye eşitlenirse denklem aşağıdaki hale gelir
i (q + mc )
ig
− iM = V (2)C2+ − s λβ γ ν ∈∗4 a4β ∗ 2
2 2
2
q − m c
ν
∗ α ∗ ig s α µ
a
λ
γ
U
C
∈
−
(
1
)
1
3 3
2
Burada q = p1 − p3 yazılarak yeniden düzenlenirse;
.
µ
(
)
g s2 1
M1 = −
U ( 2)[∈4 ( p1 − p3 + mc) ∈3 ]U (1) a3α a4β C2+ λβ λα C1 olur.
8 p1 p3
2. şekil
Notasyonları uygun şekilde yerleştirerek diyagram çizilebilir. Bu durumda ara parçacığımız
quarktır. Çünkü vertex noktalarında yükkorunmu ancak bu şekilde sağlanıyor.
G. Akdeniz, Temel tanecikler Ders notları, Bölüm V.2 15. sayfa
1.vertex için;
∗ α ∗ ig s α µ
a
λ
γ
U
(
1
)
C
∈
−
4
4
1
yazılır.
2
2.vertex için;
+ ig s β ν ∗
β∗
V
(
2
)
C
−
λ
γ
∈
a
2
3
3 yazılır.
2
µ
ν
Propagatör için;
i(q + mc )
2
2 2
q − m c
yazılır.
Enerji momentum korunumu için delta fonksiyonları tanımlanıp, yok edilirse ve kalan
terim
–iM’ye eşitlenirse denklem aşağıdaki hale gelir
i(q + mc )
ig
− iM = ∈∗4 a4α ∗ − s λα γ µ U (1)C1 2
2 2
2
q − m c
µ
+ ig s β ν ∗
β∗
−
∈
V
(
2
)
C
a
λ
γ
2
3
3
2
Burada q = p1 − p 4 yazılarak yeniden düzenlenirse;
.
ν
(
)
g s2 1
M2 = −
U (2)[∈3 ( p1 − p3 + mc) ∈4 ]U (1)a α4 a3β C2+ λα λβ C1 olur.
8 p1 p4
3. Şekil
M3 için; şeklimizi izleyerek denklemi oluşturabiliriz.
1. vertex için;
2. vertex için;
[∈
µ
3
{
+ ig s δ
U
(
2
)
C
−
λ
γ
U
(
1
)
C
2
σ
1
yazılır.
2
[
]}
a3α − g s f αβγ g µν ( p4 − p3 )λ + gνλ (− q − p4 )µ + g λµ (q + p3 )ν ∈ν4 a4β
G. Akdeniz, Temel tanecikler Ders notları, Bölüm V.2 16. sayfa
]
Propagatör için;
g σλ δ δγ
− i
q2
yazılır.
Burada q = p3 + p 4 yazılabilir. Aynı zamanda
düzenlenirse aşağıdaki halini alır.
q 2 = 2 p3 p4
yazılabilir. Denklem
g s2 1
M3 = i
U (2)[(∈3∈4 )( p4 − p3 ) + 2( p3 ∈4 ) ∈3 −2( p4 ∈3 ) ∈4 ]U (1)
4 p3 p4
(
× f αβγ a3α a4β C2+ λγ C1
)
Olur.
Toplam M ise
M = M 1 + M 2 + M 3 şeklinde tanımlanır.
ZAYIF ETKİLEŞME İÇİN FEYNMAN KURALLARI
( )
ÖRNEK 1. ∆0 (udd ) → p(uud ) + π − ud
Feynman diyagramı aşağıdaki gibi çizilir. Pionun up kuarkı anti olduğu için sanki etkileşmeye
giriyormuş gibi çizilir. Dolayısıyla 1 vertexe delta parçacığı girer proton çıkar, ikinci vertexe
de pionun up kuarkı girer yine pionun down kuarkı çıkar. Ara parçacığımız W
vertex noktalarında yük korunumu ancak bu şekilde sağlanır.
−
olu çünkü
+ ig w µ
5
U
(
3
)
C
−
γ
(
1
−
γ
)
sin
θ
U
(
1
)
C
3
c
1
yazılır. d-kuarkı
2 2
girip, u-kuarkı çıktığı için vertex katkısına sin θ c eklenir.
1. vertex için:
G. Akdeniz, Temel tanecikler Ders notları, Bölüm V.2 17. sayfa
Ara parçacığımız
W − olduğundan, propagatör
ig µν
(Mc) 2
olur.
+ ig w ν
5
U (4)C4 − 2 2 γ (1 − γ ) cos θ c U ( 2)C2 yazılır. u-kuarkı
girip, d-kuarkı çıktığı için vertex katkısına cos θ c eklenir.
2. vertex için:
Delta fonksiyonlarını yazıp, integre ettikten sonra yok ederek kalanı
Denklemimiz aşağıdaki gibi olur.
− iM
ye eşitleriz.
ig µν
ig
− iM = U (3)C3+ − w γ µ (1 − γ 5 ) sin θ c U (1)C1
2
2 2
(Mc)
+ ig w ν
5
U (4)C4 − 2 2 γ (1 − γ ) cos θ c U ( 2)C2
Denklem düzenlenirse;
M =
[
U (3)C + (γ (1 − γ ) sin θ )U (1)C ]
8(Mc )
[U (4)C + (γ (1 − γ ) cos θ )U (2)C ] olur.
g w2
µ
5
3
2
4
c
µ
1
5
c
2
ÖRNEK 2. c → s + e − + ν e
Charm parçacığının bozunumunda da zayıf etkileşme söz konusudur. Bozunumun feynman
diyagramı çizilmek istenirse; aynı türden parçacıklar eşleştirilerek yapılabilir. Yani
Birinci vertex noktasına giren ve çıkan parçacıklar sırasıyla c ve s quarklarıdır.
İkinci veretxe giren ve çıkan parçacıklar ise sırasıyla nötrüno ve elektrondur.
Ara parçacık W- olarak diğer örneklerde olduğu gibi hesaplanır. Bunların ışığında feynman
diyagramı aşağıdaki gibi çizilir.
ig w µ
5
γ (1 − γ )U (1) yazılır. Burada
2 2
1 vertex için; U (3) −
veretx faktörüdür.
G. Akdeniz, Temel tanecikler Ders notları, Bölüm V.2 18. sayfa
ig w µ
5
−
γ (1 − γ )
2 2
ig w ν
ig µ
5
5
γ (1 − γ )U (2) yazılır. Burada − w γ (1 − γ )
2 2
2 2
2 vertex için U ( 4) −
vertex faktörüdür.
ig µν
yazılır.
2
(Mc )
Paropagatör için; −
Enerji-momentum korunumu içi delta fonksiyonları yazılır. Delta foksiyonları her vertex için
4
4
4
4
yazılır. (2π ) δ ( p1 − p3 − q ) ve (2π ) δ ( p 21 − p 4 + q ) yazılır. Ara momentumlar için
integre edilip, delta fonksiyonu ihmal edilerek kalan terim –iM ye eşitlenir.
ig w µ
5
U (3) − 2 2 γ (1 − γ )U (1)
ig µν
−
2
(Mc )
ig w ν
5
U (4) − 2 2 γ (1 − γ )U (2)
4
(2π )4 δ 4 ( p1 − p3 − q ) (2π )4 δ 4 ( p21 − p4 + q ) ∫ d q4
(2π )
burada p1 = p3 + q yada q = p1 − p3 yazılarak denklem düzenlenirse şu hale gelir.
(g w )2
M=
8( Mc) 2
ig w µ
5
U (3) − 2 2 γ (1 − γ )U (1)
ig w
5
U (4) − 2 2 γ µ (1 − γ )U (2)
Olur.
G. Akdeniz, Temel tanecikler Ders notları, Bölüm V.2 19. sayfa
BÖLÜM VI
ALAN TEORİLERİNE GİRİŞ
VI. 3 BAZI ALAN MODELLERİNDE İNSTANTON VE MERON ÇÖZÜMLERİ
Önceki kısımda Alan Modelleri hareket denklemlerinin klasik çözümlerin ele almış ve
bu çözümlerin bir sınıflandırmasını yapmıştık. Ayrıca Konformal simetriye sahip alan
modellerini gözden geçirmiş, konformal simetriyi kıran instanton ve meron tipi çözümleri ele
almıştık ve bu çözümlerin fiziksel özelliklerini kısaca incelemiştik. Şimdi bu kısımda bazı
konformal simetriye sahip alan modellerini gözden geçireceğiz ve bu modellerin instanton ve
meron tipi çözümlerini bulacağız.
1- Thiring Modeli (Ann. Phys. 3,91 (1958))
Konformal simetriye sahip olan Thiring Modeli iki (oklidyen ve uzay-zaman) boyutludur ve
modelin Lagrange fonksiyonu
L = iψ
∂/ψ + g (ψ ψ )
{
123
Kinetik
terim
2
Etkileşme
terimi
dır. Burada;
ψ → fermiyon alanı ψ =ψ( x1, x2 )
r r
∂/ =σ. ∂ σ : Pauli spin matrisi
.
ψ = (ψ )T
Modelin hareket denklemleri , Euler Lagrange formalizminden
1.Yol:
∂L
∂ ∂L
= µ
∂φ ∂ {
x ∂ (∂ µ φ )
∂µ
olmak üzere ve iki ψ
ve ψ
∂
= ∂µ
∂x µ
,
∂
= ∂µ
∂x µ
alanları dikkate alındığında
∂L
∂L
= ∂µ
∂ψ
∂(∂ µψ )
∂L
∂L
= ∂µ
∂ψ
∂ (∂ µψ )
rr
iψ ∂/ψ = iψ σ .∂ψ ⇒
∂L
= iψ σ
∂ (∂ψ )
r
2 g (ψ ψ )ψ = ∂ µ [iψ σ ] = i∂ µψ σ
r
⇒ -i∂ µψ σ + 2 g (ψ ψ )ψ = 0 2. hareket denklemi.
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm VI.3 1.sayfa
Konformal simetrinin < 0 ΨΨ 0 > ≠ 0 esinlenerek, ψ =
rr
1 + i σ .x
(1 + x )
2 α
c → instantan tipi
c
bir ön çözüm düşünebiliriz. Burada c→ sabit bir spinör alanı c= 1 dir.
c2
(Bu konuda ve çözüm hakkında daha ayrıntılı bilgi için bakınız; G. Akdeniz and A.
Smailagic, Nuovo CimentoA). 51,345 (1979)
r
r
rr r
∂/ = σ .∂ , σ = σ 1i + σ 2 j → iki boyutta ,(4 boyutta olsaydı DİRAC matrisi γ lar gelirdi).
r
r
r
∂ = ∂1i + ∂ 2 j
rr
σ .x = σ 1 x1 + σ 2 x2
r
r
r
2
2
, x = x1i + x2 j , x 2 = x1 + x2
İki hareket denklemi de aynı formda olduğundan, birinci denklemi ele alıyoruz.
i∂/ψ + 2 g (ψ ψ )ψ = 0
T
r r ∗ T
rr
rr ∗ T
+
1
i
σ
.x (1 − i (σ .x ) ∗ )c ∗
∗
∗ T [(1 − i (σ . x ) )]
~
ψ = (ψ ) = ψ =
c
=
= (c )
(1 + x 2 )α (1 + x 2 )α
(1 + x 2 )α
rr
rr
∗
∗
∗ T
∗ T
(σ .x )∗ = σ~1 x1 + σ~2 x2 = σ 1 x1 + σ 2 x2 = σ .x , σ 1 = σ 1 σ 2 = σ 2
rr
1 − iσ .x )
(
bulunur.
ψ =c
(1 + x 2 )α
∗ T
( )
( )
Şimdi ψ ψ = ? bunu bulalım.
rr
rr
(
1 − iσ .x ) (1 + iσ .x )
ψψ = c
c
(1 + x 2 )α (1 + x 2 )
rr
rr
rr
rr
rr
(1 − iσ .x )(1 + iσ .x ) = 1 − iσ .x + iσ .x + (σ .x ) 2
α
rr
2
2
2
2
(σ .x ) 2 = (σ 1 x1 + σ 2 x 2 )(σ 1 x1 + σ 2 x 2 ) = σ 1 x1 + σ 1σ 2 x1 x 2 + σ 2σ 1 x 2 x1 + σ 2 x 2
{
{
1
23
I
−σ 2σ 1
I
= x1 + x 2 = x 2
2
ψψ = c
2
(1 + x 2 )
cc
bulunur.
c=
2 2α
(1 + x )
(1 + x 2 ) 2α −1
∂/ψ = (σ 1∂ 1 + σ 2 ∂ 2 )
[1 + i(σ
x + σ 2 x2 )]c
1 1
(1 + x )
2 α
∂1 =
;
∂
∂
,∂2 = 2
1
∂x
∂x
1
rr
[
1
+
i
σ
.x ]c şeklinde
(1 + x 2 )α
düşünelim.
σ 1α (1 + x 2 ) 2 x1
σ 2α (1 + x 2 ) 2 x2
[1 + i(σ 1 x1 + σ 2 x2 )]c −
[1 + i(σ 1 x1 + σ 2 x2 )]c
=−
(1 + x 2 )2α
(1 + x 2 )2α
α −1
α −1
[
]
2
2
2
2
2
2α σ 1 x1 + i (σ 1 x1 + σ 1σ 2 x1 x 2 ) + σ 2 x2 + i (σ 2σ 1 x1 x2 + σ 2 x2 )
2
c
iσ{
1 + iσ 2 c = −
2 α +1
{
+
x
(
1
)
I
I
rr
2ic
2α (σ .x + ix 2 )c
2ic
+
=−
+
2 α
2 α +1
(1 + x )
(1 + x )
(1 + x 2 )α
1
+
(1 + x 2 )α
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm VI.3 2.sayfa
Hareket denklemimiz:
i∂/ψ + 2 g (ψ ψ )ψ = 0 şeklindeydi. Yukarıda bulduklarımızı denklemde yerine koyarsak
rr
rr
2iα (γ .x + ix 2 )c
2i 2 c
cc
(1 + iγ .x )c
+
= −2 g
−
(1 + x 2 )α +1
(1 + x 2 )α
(1 + x 2 ) 2α −1 (1 + x 2 )α
rr
rr
2iα (γ .x + ix 2 )c + 2i 2 (1 + x 2 )c
(1 + iγ .x )c
α + 1 = 3α − 1 ⇒ 2α = 2 ⇒ α = 1
−
= −2 gc c
(1 + x 2 )α +1
(1 + x 2 ) 3α −1
rr
rr
i 2i + 2ix 2 (1 − α ) − 2αγ .x c
(1 + iγ .x )c
⇒
= −2 gc c
(1 + x 2 )α +1
(1 + x 2 ) 3α −1
rr
rr
⇒ −2 − 2iγ .x = −2 gc c(1 + iγ . x )
rr
rr
1
2(1 + iγ .x ) = 2 gc c(1 + iγ .x ) ⇒ c c =
c c ; x' e bağlı çıkmamalı, x' e bağlı çıkarsa yanlıştır.
g
rr
1 + iγ . x
Böylece Thiring Modeli için ⇒ ψ =
c spinor tipi instanton çözümü bulunur.
1+ x2
Bu çözüm için Aksiyonu bulmak istersek:
S = A = ∫∫ L d 2 x
rr
rr
c (1 − iγ .x ) 2i (1 + iγ .x )c
(c c ) 2
2
g
L = iψ ∂/ψ + g (ψ ψ ) = i
+
1+ x2
(1 + x 2 ) 2
(1 + x 2 ) 2
[
]
2c (1 + x 2 )c
1
1
2c c
1
1
+g 2
=−
+
mertebeler eşit olmalı.
2 3
2 2
2 2
g (1 + x 2 ) 2
g (1 + x )
(1 + x )
(1 + x )
1
1
L=−
g (1 + x 2 ) 2
=−
A=−
∞ 2π
r dr dθ
1
1
1
d 2x = − ∫ ∫
∫∫
2 2
g (1 + x )
g 0 0 (1 + r 2 ) 2
2π
=−
g
∞
r dr
∫ (1 + r
2 2
)
0
1
4243
=−
x1 = r sin θ , x 2 = r cosθ ⇒ x 2 = r 2
π
g
1/ 2
2- Sigma Modeli (İç Simetrili) : İki boyutlu, Konformal simetriye sahip olan Modelin
lagrange fonksiyonu
L=
1
2
∑ (∂
N
α =1
µφα
)
2
−
m(x) N
2
φ α − 1
∑
2 α =1
φ α = φ α ( x1 , x 2 )
N
; ∑ φα = 1
α =1
ile verilmektedir. (Bu model hakkında daha ayrıntılı bilgi için bakınız; V. de Alfora, E. Fubini
and G. Furlan; Phys. Lett. 5B,163(1976)) . Bu modelin hareket denklemlerini bulunuz ve
modelin
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm VI.3 3.sayfa
φα =
2 xµ
1 + x2
1 − x2
, φα = 0 ; α > 3
α = 1,2 φ 3 =
1 + x2
δ µα
çözümleri olduğunu gösteriniz. Bu çözümler için aksiyonun sonlu olduğunu göstererek
çözümlerin instanton özelliklerine sahip olduğunu kanıtlayınız.
Bu kez hareket denklemlerini varyasyon ( modelin Lagrange fonksiyonunu minimize ederek)
bulalım, yani
S = ∫ Ld 2 x
δS = 0 → (minimize etmek)
1 N
m( x) N 2 2
2
δS = 0 = ∫ δ ∑ (∂ µ φα ) −
∑ φα − 1d x = 0
2 α =1
2 α =1
1 N
1 N 2
m( x ) N
= ∫ ∑ 2(∂ µ φα )δ (∂ µ φ α ) − ∑ φα − 1δm( x) −
2φα δφ α d 2 x = 0
∑
2 α =1
2 α =1
2 α =1
(
dV = δ ∂ µ φ α
V = δφ α
)
(∂
Aµ = A µ Aµ
2
,
φα ) = ∂ µ φα ∂ µ φ α
2
µ
∫ udv = uv − ∫ vdu
u = ∂ µ φα , du = ∂ µ ∂ µ φα = φα
]
N
1 N
N
= ∫ ∑ (− φα )δφ α − ∑ φα2 − 1δm( x ) − m( x)∑ φα δφ α d 2 x = 0
2 α =1
α =1
α =1
N
N
1
= ∫ ∑ (− φα − m( x)φα )δφ α − ∑ φα2 − 1δm( x) d 2 x = 0
2 α =1
α =1
]
O halde hareket denklemlerimiz:
N
∑ ( φα + m( x)φα ) = 0
(1) ,
α =1
(1) . denklemi soldan φα ile çarpalım
N
∑φ
α =1
N
α
φα + m( x) ∑ φα2 = 0
α =1
123
N
1 N
− ∑ φα2 − 1 = 0 ⇒ ∑ φα2 = 1 (2)
2 α =1
α =1
N
m( x) = − ∑ φα φα
Bunu (1)de yerine koyalım.
α =1
1 (2). denk.
N
φα − (∑ φ β φ β )φ α = 0
β =1
Bu denklemlerin çözümü için, aşağıdaki instanton tipi
φα =
φ1 =
2 xµ
1+ x
2 xµ
1+ x
2
δ µα α = 1,2 φ3 =
2
δ µ1 =
1 − x2
, φα = 0 ; α > 3 çözümleri veriliyor.
1 + x2
2 x1
2x2
δ +
δ 21
2 11
1+ x
1+ x2 {
0
⇒ φ1 =
2 x1
1+ x2
, φ2 =
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm VI.3 4.sayfa
2 x2
1+ x2
N
∑φ
β =1
φ β = φ1 φ1 + φ 2 φ 2 + φ 3 φ 3 + φ 4 φ 4 + .....
β
φ1 = ∂ µ ∂ µ φ1 = ∂ 1∂ 1φ1 + ∂ 2 ∂ 2φ1 =
∂ 2φ1 ∂ 2φ1
+ 2
∂x12
∂x 2
∂φ1
∂ 2 x1 2(1 + x 2 ) − 2 x1 2 x1 2(1 + x 2 ) − 4 x12
=
=
=
∂x1 ∂x1 1 + x 2
(1 + x 2 ) 2
(1 + x 2 ) 2
(
∂ 2φ1 (4 x1 − 8 x1 ) 1 + x 2
=
∂x12
) − [2(1 + x ) − 4 x ]2(1 + x )2 x
(1 + x )
2
2
2
1
1
2 4
∂φ1
2x 2x
4 x1 x 2
= − 1 22 = −
2
∂x 2
1+ x2
1+ x2
(
) ( )
(− 4 x )(1 + x ) + 4 x x 2(1 + x )2 x
=
(1 + x )
2 2
∂ 2φ1
∂x 22
2
1
⇒ φ1 =
1 2
2 4
2
=
(
( )
(1 + x )
− 12 x1 1 + x 2 + 16 x13
=
2 3
)
− 4 x1 1 + x 2 + 16 x1 x 22
(1 + x )
2 3
− 16 x1 (1 + x 2 ) + 16 x1 x 2
(1 + x 2 ) 3
⇒ φ1 φ1 =
⇒ φ2 φ2 =
− 32 x12 (1 + x 2 ) + 32 x12 x 2
(1 + x 2 ) 4
− 32 x 22 (1 + x 2 ) + 32 x 22 x 2
(1 + x 2 ) 4
∂ 2φ 3 ∂ 2φ 3
+
∂x 22
∂x12
φ3 =
(
) (
( )
)
)
− 4 x1
∂φ 3
∂ 1 − x 2 − 2 x1 1 + x 2 − 1 − x 2 2 x1
=
=
=
2
2
2
2
∂x1 ∂x1 1 + x
1+ x
1+ x2
∂ 2φ 3 − 4 1 + x 2 + 4 x1 2 1 + x 2 2 x1 − 4 1 + x 2 + 16 x12
=
=
2
4
3
∂x1
1+ x2
1+ x2
(
)
(
( )
− 4(1 + x ) + 16 x
=
(1 + x )
∂ 2φ 3
∂x 2
2
2
(
(
)
(
)
)
2
2
2 3
⇒ φ 3 =
− 8(1 − x 2 )
− 8(1 − x 2 ) 2
⇒
φ
φ
=
3
3
(1 + x 2 ) 4
(1 + x 2 ) 3
N
⇒ ∑φ β φ β = −
β =1
8
(1 + x 2 ) 2
N
φα − (∑ φ β φ β )φα = 0
β =1
α=1 için
8
φ1 +
φ1 = 0 (?)
(1 + x )
− 16 x (1 + x ) + 16 x x
(1 + x )
2 2
2
1
1
2 3
φ3 +
8
(1 + x )
2 3
2
+
16 x1
(1 + x )
2 3
=
− 16 x1 − 16 x1 x 2 + 16 x1 x 2 + 16 x1
(1 + x )
2 3
φ 3 = 0 (?)
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm VI.3 5.sayfa
= 0 çıkar.
bulunur.
(
− 8 1 − x2
(1 + x )
2 3
)+
8
(1 + x
(1 − x ) = 0 olduğu
) (1 + x )
2
2 2
2
görülür.
N
1 N
(∂ µφα )2 − m( x) ∑ φ 2 − 1
∑
2 α =1
2 α =1
1
m( x) 2
2
2
2
= (∂ µ φ1 ) + (∂ µ φ 2 ) + (∂ µ φ 3 ) −
φ1 + φ 22 + φ 32 − 1
2
2
L=
[
=
]
(
)
1
+ φ 22 + φ 32 − 1
(∂1φ1 )2 + (∂ 2φ1 )2 + (∂ 1φ 2 )2 + (∂ 2φ 2 )2 + (∂ 1φ 3 )2 + (∂ 2φ 3 )2 − m( x) φ112 4
42443
2
2
0 olur.
[
]
4 x12
φ =
(1 + x 2 ) 2
2
1
φ +φ +φ =
2
1
2
2
⇒L=
2
3
,
4 x22
φ =
(1 + x 2 ) 2
2
1
4 x 2 + 1 + x 4 − 2x 2
4
(1 + x 2 ) 2
(1 + x 2 ) 2
(1 − x 2 ) 2
,φ =
(1 + x 2 ) 2
2
3
x 4 + 2 x 2 + 1 (1 + x 2 ) 2
=
=
=1
(1 + x 2 ) 2
(1 + x 2 ) 2
bulunur. Buradan polar koordinatl arını da kullanarak ,
∞ 2π
∞
d 2x
r dr dθ
r dr
= 4∫ ∫
= 8π ∫
= 4π
S= 4∫ ∫
2 2
2 2
2 2
-∞ − ∞ (1 + x )
0 0 (1 + r )
0 (1 + r )
+ ∞+ ∞
çözümler için sonlu aksiyon bulunur. Bu da çözümlerin instanton tipi çözümler olduğunun bir
kanıtıdır.
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm VI.3 6.sayfa
3) φ 4 Teorisi
1
1
λ
L = ∂ µ ϕ∂ µ ϕ − m 2ϕ 2 + ϕ 4 Lagrange fonksiyonu ile bilinir.
2
2
4
a )Modelin hareket denklemini bulunuz.
b) Bu modelin tek boyutlu ϕ = ATghm
x2
2
çözümü için A yı tayin ediniz.
Çözüm
a)
∂L
∂L
= ∂µ
∂ µϕ
∂ (∂ µ ϕ )
(∂ ϕ )
2
µ
m, x'e baglı olmadıgı için onu yazmadık.
(∂ ϕ ) = (∂ ϕ )
= ∂ µ ϕ∂ µ ϕ
µ
2
µ
2
∂L
λ
1
= − m 2 2ϕ + 4ϕ 3
2
4
∂ µϕ
∂L 2∂ µ
=
∂µ
∂ µ ϕ = ϕ
∂ (∂ ϕ )
2
µ
∂ 2ϕ
= ϕ
∂x 2
olduklarından, hareket denklemi
ϕ + m 2ϕ − λϕ 3 = 0
bulunur.
b ) Verilen cözüm için;
∂ϕ Am x
=
∂x
2 x2
2
1 − Tg 2 h m x
2
U′
= U ′ 1 − Tg 2 hU
2
(ChU )
2
x 2
m2x2
∂ 2ϕ Am x 2
2 m x
Tg
h
A
=
−
1
−
−
3
3
x2
∂x 2
2 (x 2 ) 2 (x 2 ) 2
2
(TghU )′ =
(
)
2
2
1 − Tg 2 h m x Tgh m x
2
2
Bulduklarımızı hareket denkleminde yerine yazarsak
3
m x2
m x 2
m x2
m x2
=0
= − Am 1 − Tg 2 h
Tgh
+ m 2 ATgh
− λA3Tg 3 h
2
2
2
2
m x2
m x2
λ
m x2
= Am 2Tgh
+ 1 − 2 A 2 Tg 2 h
− 1 + Tg 2 h
m
2
2
2
2
λA 2
2
3 m x
= m Tg h
A1 − 2 = 0
2
42m
4
3
1
0
λA 2
m
⇒
=1
A=m
m
λ
2
G. Akdeniz, Temel Tanecikler Ders Notları Bölüm VI.3 7. sayfa
1
(∂ µφ )2 + m 2 e βφ (Louville Modelinin) hareket denklemlerini bulunuz
2
2 2B 2
ve φ = A ln 2
şeklindeki bir çözüm olabilmesi için β 'yı uygun seçerek A ve
2
m 1 + x
4 ) İki boyutlu , L =
B arasındaki ilişkiyi bulunuz.. Aksiyonu hesaplayınız. (Burada x = x1 + x2 dir.)
2
2
2
Hareket denklemi; S= ∫ δLd x = 0 yöntemiyle
2
φ = m βe
olarak bulunur.
Verilen
2 2B 2
φ = A ln 2
çözümünü hareket denkleminde yerine koyarsak.
2
m 1 + x
βφ
2
∂ 2φ ∂ 2φ
+
∂x12 ∂x 22
φ =
(
4 Ax1
4 Ax 2
∂φ
∂φ
=−
=−
,
2
∂x 2
1 + x 22
∂x1
1 + x1
⇒
)
4 A 1 + x 2 + 8 Ax12
∂ 2φ
=
−
2
∂x12
1+ x2
φ = −
e
−
βφ
(
(
)
)
8 A 1 + x 2 + 8 Ax 2
=−
(1 + x )
2 2
(
)
4 A 1 + x 2 + 8 Ax22
∂ 2φ
=
−
2
∂x 22
1+ x2
,
(
)
8A
(1 + x )
2 2
2 2 B 2 2 2 B 2
= exp βA ln 2
= 2
2
2
m (1 + x ) m 1 + x
8A
(1 + x )
2 2
= m2
2
B 4 2 B
A m 2 1 + x 2
⇒
βA = B , β =
1
A
B 2 = − A 2 bulunur.
Aksiyon hesabı için;
2
φ = A ln 2
m
1
2
L = (∂ µ φ )
2
S=
A(− A2 )
2 2
(1 + x )
+
1
(∂ 1φ )2
2
+∞ +∞
∫
2
∫ Ldx1 dx2 = −16πA
− ∞− ∞
1 − R = 0 ⇒ R = ±i
2
çözümünü Lagrange fonksiyonunda yerine yazarsak,
− A2
8 A 2 (1 + x 2 )
2 8
+m
=−
2
mφ (1 + x 2 )
(1 + x 2 )2
2
(1 − R )
∫ (1 − R ) Rdr = 32π
+∞
−∞
2
2 2
2
A2
m=2
1
1 1
2π , − ,
2
2 2
G. Akdeniz, Temel Tanecikler Ders Notları Bölüm VI.3 8. sayfa
A−11 = − 12
A−21 = −
5) Ters işaretli süper simetrik model. (Akdeniz-Dane modeli)
(C. Dane and G. Akdeniz) Lett. in Math. Phys. 9,205(1985)
2
1
m2
m βφ 2
2
L = (∂ µ φ ) + iψ ∂/ψ + 2 e βφ +
e ψψ + g ψψ
m = sbt
2
β
2 2
a ) Hareket denklemlerini bulunuz?
b)
( )
rr
2
1 + iγ .x
1 2 2A
ψ=
C ve φ = ln 2
β m 1 + x2
(1 + x 2 )
∫ δLd
2
veriliyor. Bu çözümler için A ve C C nedir ?
x=0
φ ,ψ ,ψ deg işkenler
üç hareket denklemi bulmalıyız.
m2
m βφ β φ 2
1
e ψ ψ δφ
0 = ∫ δLd 2 x = 2∂ µ φδ (∂ µ φ ) + i∂/ψδψ + iψ δ (∂/ψ ) + 2 βe βφ δφ +
2
β
2 2 2
m βφ 2
m βφ 2
e ψδ ψ +
e ψ δψ + 2 g ψ ψ ψδψ + 2 g ψψ ψ δψ
+
2 2
2 2
( )
( )
δ (∂ µ φ ) = dv → v = δφ
u = ∂ µ φ → du = ∂ µ ∂ µ φ = φ
∫ udv = uv − ∫ vdu = − ∫
iψ δ (∂/ψ ) = − ∫ i∂/ψ δψ
m
δψ → −i∂/ψ +
βφ
φδφ
( )
ψ + 2 g ψψ ψ = 0
2 2
m βφ 2
δ ψ → i∂/ψ +
e ψ + 2 g ψψ ψ = 0
2 2
m2
m β βφ 2
δφ → - φ + 2 βe βφ +
e ψψ = 0
β
2 2 2
rr
rr
C (1 − iγ .x )
CC
2i(1 + iγ .x )C
ψ=
ψψ =
∂/ψ =
2
1+ x2
1+ x2
1+ x2
e
2
( )
(
φ =
∂ 2φ ∂ 2φ
+
∂x12 ∂x 22
(
)
)
4 x1
∂φ
∂ 2φ
1 4 1 + x 2 − 8 x12
=−
→ 2 =−
2
∂x1
β
β 1+ x2
∂x1
1+ x2
8
φ = −
x12 + x 22 = x 2
2 2
β 1+ x
(
)
(
)
(
)
m 2 βφ mβ − β φ 2
φ =
e +
e
ψψ
β
4 2
G. Akdeniz, Temel Tanecikler Ders Notları Bölüm VI.3 9. sayfa
′
β φ2
e = u
−
(
(e )′ = u
ln u
mβ 2 2 A CC
m2 2 2A
+
=
2
2
2
2
β m 1 + x
4 2 m 1+ x 1+ x
2
8
)
− 16(1 + A )
CC =
2
β 1+ x2
2
β 2A
bulunur ve yerine yazarsak A için,
(β
2
)
− 32 g A 2 − 2 β 2 A − 32 g = 0
⇒ A1, 2 =
(
2(β − 32 g )
2 β 2 m 4 β 2 + 128 g β 2 − 32 g
)
2
bulunur.
6) 4 boyutlu Konformal invaryant Gürsey Modeli (1956)
L =
(
i
ψ ∂/ ψ + g ψ ψ
2
)
4
3
Lagrange fonksiyonu ile verilir. Bu modelin
İnstanton tipi
a ± iγ . x
ψ=
C
3
a 2 + x2
(
)
çözüm için
(CC )
1
3
=3a
g
olduğunu gösteriniz.
Meron tipi
γ .x
±
1
i
3
1
2 4
2
2
x
x
1
91
çözüm için 2CC 3 =
8g
40-44 (1982))
ψ=
1
( )
(
( )
)
olduğunu gözteriniz. (G.Akdeniz, Nuovo Cim. Lett. Vol. 33 ,
7) 2- Boyutlu bir gravitasyonel modelin Lagrange fonksiyonu
2
2
1 ∂φ ∂φ
L = + + ae βφ ile verilmektedir. Bu modelin instanton tipi çözümünün
2 ∂x ∂t
2
C
φ = A ln B
şeklinde bir logaritmik formda olabilmesi için A, B ve C
2
2
1 + x + t
arasındaki bağıntıyı α ve β cinsinden tayin ediniz.
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm VI.3 10.sayfa
BÖLÜM VI
ALAN TEORİLERİNE GİRİŞ
VI. 1 PARÇACIK FİZİĞİNDE ALAN TEORİLERİNE KISA BİR TARİHSEL GİRİŞ
1900 başlarında kuvantum fiziğinin ortaya çıkması ile 1926 yılında Schrödinger’in, Bohr
tarafından keşfedilen bir atomdaki elektronların acayip davranışlarının de Broglie dalga teorisini kesin
matematiksel denklemlere dönüştürmüş olması, yani küçük cisimlerin davranışının non-lineer
“kuvantum dalga denklemleri” (Schrödinger Denklemi) ile belirlenebileceğinin anlaşılması ve 1930 lu
yıllarda Dirac tarafından yazılan spinör alanlı non-lineer dalga denklemi çözümlerinin (gene Dirac
tarafından bulunan) elektron ve anti-elektron yorumlamasındaki başarısı, teorik fizikte yeni bir
paradigmanın ortaya çıkmasına neden olmuştur. Bu paradigma teorik fizikçileri temel parçacıklar için
yeni non-lineer alan denklemleri yazmaya ve bu denklemlerin fiziksel dalga çözümlerini aramaya
teşvik etti. Yeni parçacıkların keşfedilmesi ile bu teorik çalışmalar ve arayışlar daha da cazibeli bir
duruma geldi. Özellikle 1950’li yıllardan itibaren teorik fizik dünyasında söz konusu bu çabalarda
büyük bir artma gözlendi. Tüm parçacıkları kapsayacağı ümit edilen geniş simetrilere sahip bir çok
sayıda teorik modeller geliştirildi ve önerildi. Non-lineer alan denklemleri üzerine yapılan bu ısrarlı
çalışmalar ve arayışlar en sonunda meyvesini verdi. Temel parçacıkları tek bir alan teorisi altında
toplayabilmenin önünü açacak matematiksel yapının temelleri atıldı. 1954 yılında iki teorik fizikçi,
Yang ve Mills çok önceleri matematikçiler tarafından üzerinde çalışmalar yapılmış Abelyen olmayan
Lie gruplarının sınıflandırılmasını bu tip non-lineer alan modellerine uyguladılar. Geometrik olmayan
iç simetrileri de kapsayan (global ayar) ve parçacıkları veren alanların dinamik yapılaşmasını da
verebilecek local gauge (yerel ayar) simetrisine sahip teorik alan modeli, Langrange fonksiyonu
formalizmini geliştirdiler.
O yıllardan bugüne alan teorilerinin üzerine yapılan ve yapılanmakta olan çalışmalar
sürmektedir; doğadaki gravitasyon dışındaki etkileşimlerin ayar teorilerinin geliştirilmesi, bu
teorilerde simetrinin kendinden kırılmasının anlaşılması, zayıf etkileşmelerdeki ara bozonların
hızlandırıcılarda bulunması, ayar teorilerin dinamik özelliklerinin, ara parçacık alış verişi, bu alış
verişte ortaya çıkan bozuklukların giderilerek, Feymann diyagramlarıyla ifade edilebilmesi, süper
simetri kavramı ve birleşik alan teorileri gibi devrimci görüşler ve buluşlar bu son 30 yıl içine
sığmıştır. Parçacık fiziğinin standart modeli diyebileceğimiz bu oluşumlar kümesi kozmolojide de
önemli gelişmelerin önünü açmıştır. Standart
modelin arkası üzerine yapılan teorik çalışmalar, kütle çekimli süper sicim teorileri, yüksek boyutlu
G. Akdeniz; Temel Tanecikler Ders Notları, Bölüm VI.1 1. Sayfa
modeller, süper simetrili modeller gibi, sürmektedir.
Parçacık fiziğindeki bu hızlı gelişmeler, modellerle ortaya çıkan non-lineer alan denklemlerin
geniş simetrili fiziksel çözümlerinin yeni teknikler geliştirilerek bulunmasını (örneğin yerel ayar
teorilerdeki perturbasyon tekniği) ve bu çözümlerin fiziksel özelliklerinin ve yerinin tartışılmasını hep
yanında taşımıştır. Şimdi bu topolojik çözümleri kısaca gözden geçirelim ve bir sınıflandırmasını
verelim.
Solitonlar: Lagrange tipi alan teorilerinin klasik hareket denklemlerinin sonlu-enerjili, kararlı
dalga çözümlerine genelde soliton adı verilir. Solitonlar 19. yüzyılda uygulamalı matematikçiler
tarafından non-lineer dalga denklemlerinin çözümlerinde bulunmuşlardır, daha sonra ki yıllarda katı
hal fiziği ile plazma fiziğinin bazı problemlerini açıklamada kullanılmıştır. Solitonların parçacık
fiziğinde anlamlı (relevant) çözümler olabileceğinin anlaşılması 1960 lı yıllara dayanır . Sonlu enerjili
yerel dalga çözümlerini ifade eden solitonlar, gerek (dalga) yayılırken gerekse kendi aralarındaki
etkileşmelerinden sonra yapılarını korurlar. Başka bir değişle şekillerini sürekli koruyarak, yaşamlarını
sonsuza dek sürdürürler, kendi aralarında etkileştiklerinde bilgi alış verişinde (enerji alış verişi)
bulunmazlar. Örneğin foton tipik bir soliton karakterindedir. Bu özelliklerinden dolayı kararlı
parçacıklar soliton çözümleri ile ifade edilmeye çalışılmıştır. Öte yandan solitonların parçacıklar
fiziğinin önemli bir çalışma alanı olmasını
sağlayan diğer bir özelliği de topolojik görünümleridir. Şimdi solitonları topolojik klasik çözümler adı
altında sınıflandırarak kısaca özelliklerini gözden geçirelim. (Solitonlar hakkında daha geniş bilgi için;
Rajaraman,R. (1982) Solitons and Instantos, North-Holland, Amsterdam;
Rebbi, C. and Solliani, G.
(1984) Solutons and Particles, World Scientific, Singapore; Actor, A. (1980) Clasical Solutions and
the Energy –Momentum Tensor, Annals of Physics, Vol.131,269-282; Eilenberg, G . (1981) Solitons
in Nuclear and Elemantry Particle Physics, World Scientific,Singapore .)
Topolojik Klasik Çözümler genel olarak, a) sabit, b) statik, yalnız uzaya bağlı ve c) hem uzaya
hem de zamana bağlı (uzay ve zamanda açılan instanton ve meron çözümleri) çözümler olmak üzere
üç kümeye ayrılırlar.
a) Sabit çözümler: Bu çözümler sıfırdan farklı olan ve potansiyeli minimum
kılan, sıfır – enerjili kararlı çözümlerdir. Bunlar vakum çözümleri olup, solitonlar bu çözümler
arasında hapis olduğundan sonlu enerjiye sahiptirler. Bu tezde inceleyeceğimiz soliton çözümleri bu
özelliğe sahiptir. Perturbasyon tekniği ile bulunan soliton çözümü kendiliğinden sabit çözümler
arasında hapis olmaktadır. Sabit çözümler Yang-Mills yerel ayar teorilerinde simetrinin kendiliğinden
kırılmasında ve Higgs mekanizmasında önemli rol oynarlar.
G. Akdeniz; Temel Tanecikler Ders Notları, Bölüm VI.1 2. Sayfa
b) Statik çözümler: Bu çözümler ise uzay boyutuna göre, tek boyutlu kink (tek yamaçlı)
çözümleri , iki boyutlu vorteks çözümleri ve üç boyutlu mono–pole (tek kutup) çözümleri adı altında
üçe ayrılırlar. Kink çözümleri Baryonlar olarak yorumlanır.
Ayrıca bu çözümlerin Sine-Gordon
denklemini VI.3 de ele alacağımız kütleli Thirring Modeline dönüştürebileceği gösterilmiştir. İki
boyutlu vorteks çözümleri tek yamaçlı çözümlere boyut açısından genişleme yapılabilmesi uğraşları
ötesine geçememiştir. Mono-pole çözümleri SU(2) ayar teorilerinde tekil uzaysal noktanın hapis
olması ile t’Hooft bulmuştur. (t’Hooft,G. (1971) Nucl. Phys., B35 , 267) Bu çözümlerin kutup özelliği
olması, Maxwell denklemlerini daha simetrik yazmak için Dirac tarafından ortaya atılan magnetik
mono-pole parçacıklarına karşılık gelmesini sağlamıştır. Buradaki açmaz da magnetik mono-polelerin
gözlenememiş olmasıdır. Başka bir deyişle büyük patlama sonrası mono-pole tipi parçacıklar yaşama
ortamı bulamamışlardır.
c) Topolojik çözümler: Topolojik özellikleri olan, hem uzaya hem de zamana bağlı olan, uzay
ve zamanın iç içe girdiği veya uzay ve zamanın birlikte sonsuza açıldığı klasik çözümlerdir. Bu
çözümlere örnek olarak instanton ve meron tipi çözümler verilebilir. İnstanton ve meron çözümlerinin
simetrik özelliklerini ve çeşitli alanlardaki yapılarını VI.3 de geniş olarak ele alacağız ve çeşitli alan
modellerinde bu çözümlerin nasıl bulunacağını göstereceğiz. Konformal simetrinin kırılması ile
bulunan instanton çözüm tekniğini VI.2 de kısaca anlatılacaktır. İnstantonlar sıfır enerjili çözümlerdir
ve eylemleri sonludur. Kuvatum karakteri taşırlar, bu nedenle kuarkların vakum durumu olarak
yorumlanmışlardır ve vakumlar arası geçişi verdiklerinden kuarkların birlikte dolaşmalarını (her
zaman ikili yada üçlü bir yaşantının içine hapsedilmiş olmalarını) açıklamada önem kazanmışlardır.
Meronlar ise uzay-zamanda singülerdirler. Bu singülerlikten uygun bir dönüşümle kurtulunur.
1950 li yılların, keşfedilen parçacık sayısındaki hızlı artışın da etkisiyle, teorik fizikte her
temel bir taneciği bir denklemle ifade etme çalışmalarının yoğunluk kazandığı yıllar olduğunu
söylemiştik. Parçacıkları bir denklemle ifade etmenin en önemli nedenlerinden biri de Dirac’ın spinli
parçacıklar için yazdığı rölativistik (görelilik) kuvantum özelliği olan, yani göreliliğin ve kuvantum
fiziğinin ilkelerini bir araya getiren ve “Dirac Denklemi” olarak bilinen denklemin, elektronun ve antielektron özelliklerine uygun sonuçlar vermesiydi. (Anti-elektronların (pozitron) Anderson tarafından
kozmik ışınlarda 1932 yılında keşfedilmesi ve aynı anda bir elektron yaratmadan bir pozitron
yaratmanın olanaksızlığının anlaşılması) Fakat Dirac Kuramı ile ortaya çıkan her parçacık-antiparçacık çiftine bir denklem fikrinin, özellikle parçacıkların kuvantum sayılarında karışıklıklara yol
vereceği de açıktı. Born ve Heisenberg bunun tek bir birleşik denklem yazmakla aşılabileceğini öne
sürdüler. Bu fizikçilere göre, tüm parçacıkların inşasına olanak verecek bir alan modeli non-lineer
yapıda ve fermiyon özelliği olan bir dalga
G. Akdeniz; Temel Tanecikler Ders Notları, Bölüm VI.1 3. Sayfa
denklemi olmalıydı. Tüm parçacıklar da bu denklemin çözümünü veren fermionsal parçacıklardan
oluşmalıydı. Özellikle 1950 li yıllarda Heisenberg ve öğrencileri bu tip bir alan modeli yazmak için
büyük çabalarda bulundular. Heisenberg ve öğrencileri Dirac denklemine benzeyen, kütle terimine ek
olarak fermiyonların diğer parçacıkları oluşturabilmesi için; kendi aralarında bütünleşmeleri de ifade
eden terimi de içeren modeller geliştirdiler. Heisenberg’in bu çalışmalarından ve çabalarından
etkilenen bir çok teorik fizikçide benzer spinor alanlı modeller geliştirdi. Hızlandırıcıların gelişmesi ile
bulunan yeni deney sonuçları ve arkasından Yang-Mills tarafından bulunan yerel ayar teorileri
Heisenberg bu rüyasına son verdi. Fakat konformal simetrilere sahip spinor alanlı non-lineer modeller
ve spinli parçacıklar olan kuarkların 1960 yılına doğru Gell-Mann ve Y.Neeman tarafından önerilmesi
ve deneylerde keşfi ile tekrar önem kazandılar. 1970 li yılların sonuna doğru Yang-Mills teorilerinde
instanton tipi çözümler bulundu. (Polyakof, A. M. , Schwartz, A. S. and Tyupkin, Yu. S. (1975) Phys.
Lett. B59 , 85;) Bu çözümlerin uzay-zamana bağlı olmaları yanında, vakum özellikleri göstermeleri
parçacık fizikçilerinin büyük bir ilgisini çekti. Bu ilgi çeşitli skaler alan modellerinde instanton
çözümlerinin bulunması ile kendini gösterdi, örneğin Alfaro, Fubini ve Furlan Sigma Modelinde
instanton çözümleri buldu (Alfaro, V.D. and Furlan, G. (1976) Nuovo Cimento,34a,555).
Bu
gelişmelere paralel olarak Akdeniz ve Smailagic spinör tipi insatanton çözümleri bulmak için, iki
boyutlu saf fermiyonsal ve konformal simetriye sahip olan kütlesiz Thirring Modeli (Thirring , W.E.
(1958) A Soluble Relativistic Field Theory , Annal physics, Vol.3,91-112) üzerinde bir laboratuar
model olarak çalışmalar yaptılar ve bu modelde konformal simetrinin kırılması ile fermiyon tipi
instaton ve meron tipi çözümleri buldular (Akdeniz, K. G and Smailagic , A . (1979) Clasical Solitons
for Fermionic Models, II Nuova Cimento, Vol. 51A, No.3,345-357) Bu çözüm tekniğini Bölüm VI.3
de göstereceğiz. Spinör tip instanton ve meron çözümlerini dört boyuta taşımak için yeni bir
konformal invaryant spinör model Akdeniz- Smailagic tarafından önerildi. Bu modelde konformal
invaryantlığın sağlanması ve etkileşme terimi kuantizasyon için gerekli perturbasyon tekniklerine
uygun olabilmesi için ancak üçüncü mertebeden türevlerle sağlanabildiğinden, model matematik bir
model olmaktan öteye gidemedi.
Konformal invaryant alan modelleri üzerine yapılan bu çalışmalar üzerine, Akdeniz 1982
yılında yaptığı bir çalışma ile (Akdeniz,
K .G. (1982)
Classical Solutions of the Gürsey ’s
Conformal-Invariant Spinor Model, Lettere al Nuova Cimento, Vol . 33,40-44.) Gürsey tarafından
1955 yılında geliştirilmiş bir spinör alan dalga denklemini (Gürsey , F. (1956) On a Conform- Ivariant
Spinor Vave Equation , IINuova Cimento , vol. 3, No.5, 988-1006) parçacık fizikçilerinin dikkatine
sundu. Heisenberg’in rüyasını gerçekleştirmek için Gürsey tarafından önerilen bu denklem konformal
simetriye haiz ilk non-lineer spinör dalga denklemidir. Bu özelliklerinden dolayı, Gürsey non-lineer
spinor dalga denklemi (GSD), Dirac denklemine ve Heisenberg ve arkadaşlarının önerdiği
denklemlere göre daha geniş dinamik bir simetriye sahiptir. Ayrıca fermiyonların dışındaki diğer
spinli parçacık yapılaşmasına da açıktır. Akdeniz
G. Akdeniz; Temel Tanecikler Ders Notları, Bölüm VI.1 4. Sayfa
aynı çalışmada GSD de konformal simetrinin kırılması ile instanton ve meron tipi çözümlerini buldu
ve bu çözümlerin Heisenberg’ le bu konularda araştırmalar yapmış olan Kortel tarafından 1956
yılında ( Kortel,
F. (1956) On Some Solutions of Gürsey’s Conformal – Invarian Spinor Vave
Equation, II Nuova Cimento, vol .4, No.2, 210-215) GSD de bulunan çözüm sınıfının içinde mevcut
olduğunu gösterdi. Bu çalışma sonrası GSD dört boyutlu ve birinci mertebeden türev içermesi
nedeniyle de tekrar teorik fizik dünyasının gündemine geldi ve gerek denklem gerekse model olarak
üzerinde bir çok çalışma yapıldı. GSD nin diğer fiziksel çözümlerinin bulunmasında, modelin
kuvantum özelliklerinin anlaşılmasında ve yeni versiyonların yapılması çalışmalarında da bir çok Türk
fizikçisinin de imzası vardır. Bu önemli çalışmaların çoğu Türkiye’de yapılmıştır ve bir çok tez
çalışmasına konu olmuşlardır Ayrıca son yıllarda GSM’ nin daha yüksek boyuttaki instanton ve meron
çözümleri bulundu. Bu çalışmalar hakkında (Önem, C. “Başlıklı” Doktora Tezi, İstanbul Üniversitesi
Fen Bilimleri Enstitüsü, 2001)
Gelecek bölümde alanlar teorisindeki Lagrange Fonksiyonu formalizmini ele alacağız. ve
Euler Lagrange diferansiyel denklemlerinin çıkartılışı üzerinde duracağız. Bu denklemlerin simetrik ve
değişmezlik özelliklerini ele alacağız. Değişmezlik özelliklerine bağlı olarak ortaya çıkan korunumları
tartişacağız. Lagrange fonksiyonlarının yerel faz dönüşümlerine göre değişmezliğini, örneğin bu
değişmezlik Elektromagnetik kuramında yük korunumunu verir ve “ayar alanı” adı verilen bir alanın
varlığını ortaya koyar, bu yeni alan fotonların bütün özelliklerin taşır, inceleyeceğiz. Ortaya çıkan
yerel ayar alanların ara parçacıkların özelliklerini verdiğini göreceğiz. Ayrıca dört-boyutlu konformal
koordinat dönüşümünün özelliklerini kısaca ele alacağız. Konformal dönüşümün türev operatörlerinin
Lie Grubu yapılaşmasını ve Lie cebiri özelliklerini vereceğiz. Konformal invaryant ve spinor alanları
içeren bir modelde, konformal simetrinin nasıl kırılabileceğini göstereceğiz. Bölüm VI.3 de konformal
simetrinin kendiliğinden kırılmasın ile instanton ve meron tipi spinor çözümlerin nasıl elde edileceğini
gösterip çeşitli skaler ve spinör alanlı teorik modellerde instanton ve meron çözüm örneklerini
vereceğiz.
Bölüm V!.4 de kütleli Thirring Modelinde ve Kütleli Gürsey Modelinde Soler ön-çözümü (Soler , M.
(1970) Classical , Staible , Nonlinear Spinor Field with Positive rest Energy , Physical Rev. D. , 1 ,
2766 – 2769) ile soliton yapılaşmalarını göstereceğiz. Bulanan soliton çözümlerinin dinamik yapısını
tartışacağız.
G.Akdeniz, Temel Tanecikler Ders Notları, Bölüm VI.1 5.sayfa
PAULİ MATRİSLERİ (Temel parçacıklar)
1)Yarım-spinli parçacıklar
2)Hamiltonien ve Lagrangien
S=1/2 parçacıkların Li =
1
σi
2
i=1,2,3
σ i ’ lere Pauli matrisleri diyoruz.
0 1
0 − i
σ 1 = σ x =
σ 2 = σ y =
1 0
i 0
1 0
σ 3 = σ z =
0 − 1
ÖZELLİKLERİ:
2
2
2
1) σ 1 = σ 2 = σ 3 = I
2) σ 1σ 2 = −σ 1σ 2 = iσ 3 , σ 2σ 3 = −σ 2σ 3 = iσ 1 , σ 3σ 1 = −σ 1σ 3 = iσ 2
3) Komitatifliği; [σ 1 , σ 2 ] = 2iσ 3
[σ
[σ
Genel:
, σ 3 ] = 2iσ 1
]
1 , σ 2 = 2iε ijk ∇ k
2
4) σ 1 .σ 2 .σ 3 = iI
2
2
2
5) Tr [σ i ] = 0
6) det(σ i ) = −1
7) {σ i ,σ j } = 2iδ ij = σ iσ j + σ j σ j
[
8) Tr σ iσ
j
] = 2iδ
ij
Dairesel permütasyon.
[σ
3
, σ 1 ] = 2iσ 2
© Copyright 2026 Paperzz