OTEKON’14
7. Otomotiv Teknolojileri Kongresi
26 – 27 Mayıs 2014, BURSA
HETEROJEN FİLOLU YEŞİL ARAÇ ROTALAMA OPTİMİZASYONU
Seval Ene, İlker Küçükoğlu, Aslı Aksoy, Nursel Öztürk
Uludağ Üniversitesi, Mühendislik Fakültesi, Endüstri Mühendisliği Bölümü, BURSA
ÖZET
Küreselleşen dünyada lojistik, çağdaş taşımacılık sisteminin merkezindedir. İşletmeler sosyal sorumluluk bilinci içinde
doğal kaynakların doğru ve adil kullanımını dikkate alan yeşil lojistik uygulamalarını benimsemek durumundadır. Son
yıllarda literatürde ve pratik uygulamalarda yeşil lojistiğe olan ilgi artmıştır; ancak, araç rotalama faaliyetlerinin yeşil
lojistik prensipleri dikkate alınarak optimize edilmesi alanında yapılmış sınırlı sayıda çalışma mevcuttur. Bu çalışmada,
heterojen araç filosuna sahip yeşil araç rotalama problemi için karışık tam sayılı doğrusal programlama modeli
geliştirilmiştir. Geliştirilen model yakıt tüketim algoritması ile entegre çalışarak, farklı kapasitelere sahip araçlar ile
zaman penceresi kısıtına uyarak yakıt tüketimini enazlayan rotalar oluşturmaktadır. Oluşturulan matematiksel model
literatürde sıkça kullanılan örnek problem kümesi ile test edilmiş ve modelin optimal sonuç verdiği gözlenmiştir.
Anahtar kelimeler: Yakıt tüketimi, yeşil araç rotalama, karışık tam sayılı programlama
GREEN VEHICLE ROUTING OPTIMIZATION WITH HETEROGENOUS FLEET
ABSTRACT
In the global world, logistics stay in the center of modern transportation systems. Companies must adopt green logistics
operations that consider fairly and accurately use of natural sources, within the social responsibility. Although, in recent
years, the interest to green logistics has increased in literature and real world applications, there is limited number of
studies about green vehicle routing optimization. This study proposes a mixed integer linear programming model for
green vehicle routing problem with heterogeneous fleet. The developed model, integrated to fuel consumption
algorithm, constitutes optimal routes which minimizes fuel consumption under the different capacity and time window
constraints. The model is tested with problem sets in literature and it is observed that the proposed model gives
optimum solutions.
Keywords: Fuel Consumption, green vehicle routing, mixed integer linear programming
protokol ile taraf ülkelere yasal emisyon azaltımı
yükümlülükleri getirilmiştir. Buna göre her ülkenin yıllık
CO2 salınımı büyük önem kazanmaktadır. Bu durum ise
ülkelerin
CO2
miktarlarının
hesaplanmasını
gerektirmektedir.
Otomotiv endüstrisinde tedarik zincirinin çevresel
açıdan en etkileyici parçası taşımalardan oluşmaktadır.
Taşımaların neden olduğu CO2 emisyon miktarının,
toplam CO2 emisyonunun %14’ünü oluşturduğu ve
1990’lı yıllarla kıyaslandığında günümüzde taşımalardan
kaynaklanan CO2 salınımının %18 arttığı belirtilmektedir
[1]. Taşıma faaliyetleri aynı zamanda çevreye salınan
NOx (azot oksitleri), SO2 (kükürtdioksit) ve PM’in
1. GİRİŞ
Son yıllarda otomotiv endüstrisinde araç tasarımları
üzerinde çalışılan başlıca konulardan biri, araçların
çevreye verdiği olumsuz etkileri azaltmak üzerinde
yoğunlaşmıştır. Otomotiv üreticilerine, taşıtların neden
olduğu hava kirliliği ve gürültü kirliliğinin azaltılması ile
ilgili yasal sorumluluklar getirilerek tasarımlarda çevresel
kısıtların da yer alması sağlanmıştır.
Atmosferde karbondioksit (CO2) birikiminin sera
etkisi üzerindeki olumsuz etkileri çok önceden bilinmekle
birlikte, bu etkilerin ortadan kaldırılması için yapılan
çalışmalar son yıllarda artmıştır. Bu amaçla yapılan en
önemli uluslararası düzenleme Kyoto protokolüdür. Bu
1
(partikül madde veya ince toz) ana kaynağıdır [2].
Yeşil lojistik yaklaşımı, hammadde temininden atık
yönetimine kadar olan süreçte tüm lojistik faaliyetlerin
çevre üzerindeki olumsuz etkilerini değerlendiren ve en
aza indirmeye çalışan bir yaklaşımdır. Yeşil lojistik
uygulamalarının operasyonel süreçlere özgünlük katarak,
tedarik zinciri boyunca kalite ve verimliliği geliştirdiği,
uygulayıcı işletmeleri inovatif kararlar almaya zorlayarak
geliştirilen hizmet ve/veya ürünlerde farklılık yarattığı,
artan enerji maliyetleri karşısında üreticilerin ve/veya
hizmet sağlayıcıların rekabetçi yönünü geliştirdiği
bilinmektedir.
Bu çalışmada, heterojen araç filosuna sahip yeşil araç
rotalama problemi için karışık tam sayılı doğrusal
programlama modeli geliştirilmiştir. Modelde, farklı
kapasitelere sahip araçlar ile zaman penceresi kısıtına
uyarak
yakıt
tüketimini
enazlayan
rotalar
oluşturulmaktadır. Çalışmanın ikinci bölümünde,
literatürde yeşil lojistik ve araç rotalama ile ilgili yapılmış
çalışmalar, üçüncü bölümde yakıt tüketimi algoritması,
dördüncü bölümde problem tanımı ve matematiksel
model, beşinci bölümde geliştirilen matematiksel model
ile yapılmış sayısal uygulamalar, altıncı bölümde ise
sonuçlar yer almaktadır.
yani enerji tüketiminin optimizasyonunu da dikkate alan
araç rotalama problemidir [15]. Kuo, zamana bağımlı
araç rotalama problemlerinde yakıt tüketiminin hesabı
için bir model önermiştir. Modelde hız ve seyahat
sürelerinin gezi süresine bağlı olduğu varsayılmıştır. En
düşük toplam yakıt tüketimine sahip araç rotalarını
bulmak için probleme tavlama benzetimi algoritması ile
çözüm üretilmiştir [16]. Bektaş ve Laporte, araç hızları ve
araç ağırlığına bağlı olarak CO2 emisyon miktarları
üzerinde
çalışma
yapmıştır.
Probleme
ilişkin
matematiksel modelin de yer aldığı çalışmada farklı
boyuttaki örnek problemler üzerinde uygulama
yapılmıştır [17]. Suzuki, araç rotaları oluşturulurken
yüksek ağırlıkta talebi olan müşterilere öncelik verilmesi
stratejisi ile araçlarda CO2 emisyon miktarında
iyileştirme sağlamıştır [18]. Xiao ve ark., çalışmalarında,
araç rotalama probleminde amaç fonksiyonunu toplam
rota uzunluğunun minimizasyonu yerine araçların toplam
yakıt
tüketiminin
minimize
edilmesi
olarak
tanımlamışlardır. Probleme ait matematiksel modelin de
yer aldığı çalışmada uygulama aşamasında problemin
çözümü için tavlama benzetimi algoritması kullanılmıştır
[19]. Erdoğan ve Hooks, araçların yakıt tüketimlerini
dikkate almış ve yakıt istasyonlarını da araçların
uğraması gereken bir nokta olarak kabul ederek araç
rotalarını bu istasyonlara göre oluşturmuşlardır [20].
Apaydın ve Gönüllü, Trabzon’da çöp toplama işlemleri
için kullanılan dizel araçların CO2 emisyon değerini
düşürmek
amacıyla
araç
rotalama
problemini
incelemiştir. Çalışmada, en iyi araç rotasının tespiti için
sezgisel algoritmalardan birisi olan
“en kısa yol”
algoritması kullanılmıştır [21]. Wygonik ve Goodchild
kentsel toplama ve dağıtım sistemleri için emisyon
değerlerini minimize eden zaman pencereli araç rotalama
problemi için model geliştirmişlerdir [22]. Jabali ve ark.,
zamana bağımlı araç rotalama probleminde CO2 emisyon
değerleri için kavramsal model önermişler ve modeli tabu
arama algoritması ile çözmüşlerdir [23]. Pradenas ve ark.,
homojen araç filosu için sera gaz emisyonlarını minimize
eden bir matematiksel model önermişlerdir [24]. Wu ve
ark., yakıt tüketimi ve egzoz emisyonlarının tahmini ile
ilgili çalışma yürütmüşlerdir [25]. Küçükoğlu ve ark.,
kapasite kısıtlı yeşil araç rotalama problemi için karışık
tamsayılı doğrusal programlama modeli önermişlerdir
[26]. Demir ve ark., çalışmalarında iki amaçlı araç
rotalama problemini incelemişlerdir. Amaçlardan biri
yakıt tüketimi ile ilgili iken diğeri sürüş zamanı ile
ilgilidir. Problemin çözümü için adaptif geniş komşuluk
arama algoritmasını kullanmışlardır [27]. Jovanovic ve
ark., kamu ulaştırma ağlarında yeşil araç dağıtım modeli
önermişlerdir. Problem doğrusal olmayan optimizasyon
modeli olarak tasarlanmıştır ve çözüm için sinirsel ağ
tabanlı bulanık mantık yaklaşımı kullanılmıştır [28].
Yukarıda da kısaca özetlenen Y-ARP ile ilgili
çalışmalarda çoğunlukla kapasite ve zaman kısıtları
dikkate alınmış ve araç filoları homojen kabul edilmiştir.
ARP’de heterojen araç filolarını dikkate almak gerçek
problemlere ve uygulamalara daha yakın bir yaklaşımdır.
2. KAYNAK ARAŞTIRMASI
Araç rotalama problemi (ARP) nin, ilk temel
çalışmaları Dantzig ve Ramser [3] ile Clarke ve Wright
[4] tarafından yapılmıştır. Bugüne kadar devam eden
çalışmalarla birlikte, günümüzde de üzerinde en yaygın
çalışılan problemlerden biridir. ARP, geniş uygulama
alanı ve dağıtım lojistiğindeki operasyonel maliyetleri
azaltmadaki etkinliği sebebiyle yoğun ilgi görmektedir
[5]. Zaman pencereli araç rotalama problemi (ZP-ARP),
ARP’nin genişletilmiş bir türüdür. ZP-ARP, bir depodan
çıkan araç filosu ile belli bir zaman penceresinde,
birbirinden farklı lokasyonlardaki, çeşitli sayıda ve
bilinen taleplere sahip müşterilere hizmet sunup depoya
dönmek için gerekli rotaların belirlenmesi problemidir.
Literatürde ARP [6, 7, 8, 9 vb.] ve ZP-ARP [10, 11, 12,
13 vb.] ile ilgili yapılmış çok sayıda çalışma mevcuttur.
Klasik ZP-ARP’de amaç, müşteriler tarafından belirlenen
zaman penceresi kısıtı ve kapasite kısıtlarını aşmadan
mimimum maliyetle tüm müşterilere hizmet sunmaktır
[14].
Ekonomik etki odaklı klasik dağıtım lojistiği
stratejilerinin uzun vadede sürdürülebilir olmaması, yeşil
lojistiğe duyulan ilginin artmasına sebep olmuştur.
Lojistik politikaları tasarlanırken, ekonomik etkiye ek
olarak, çevresel, ekonomik ve sosyal etkiler de dikkate
alınmalıdır. Çevreye duyarlı lojistik politikaları, mevcut
ulaştırma şemalarının, çevre ve ekolojiye negatif etkinin
azaltıldığı,
sürdürülebilir
dağıtım
ağlarına
dönüştürülmesini gerektirmektedir [15]. Son yıllarda
çevreye duyarlı lojistiğe duyulan ilginin artmasına
rağmen literatürde yeşil araç rotalama problemi (Y-ARP)
üzerine sınırlı sayıda çalışma mevcuttur. Y-ARP,
ulaştırma optimizasyonunun yanı sıra yakıt tüketiminin
2
Heterojen araç filolu ARP, farklı kapasite, değişken ve
sabit maliyetlere sahip araçları dikkate alan bir ARP
türüdür [29]. Literatürde heterojen araç filolu ARP [29,
30, 31 vb.] ile ilgili bazı çalışmalar mevcuttur. Ancak
heterojen araç filolu Y-ARP ile ilgili çalışmalara
rastlanmamıştır. Erdoğan ve Hooks [20] Y-ARP’de araç
yakıt kapasitelerini dikkate alan bir model önermişler
fakat
yük
kapasitesinde
heterojenliği
dikkate
almamışlardır.
Bu çalışmada literatürden farklı olarak heterojen araç
filolu ve zaman pencereli Y-ARP ele alınmıştır. Araç
filosunda farklı yük ve yakıt kapasitesine sahip araçlar
dikkate alınmıştır. Problem için karışık tamsayılı
doğrusal programlama modeli önerilmiştir. Önerilen
modelde amaç, heterojen filolarda toplam yakıt
tüketimini ve CO2 emisyon değerlerini minimize eden
araç kombinasyonlarını ve rotalarını belirlemektir.
önüne alınmış ve araç rotalama modelinde toplam yakıt
tüketimini minimize edecek amaç fonksiyonu olarak
kullanılmıştır. Bu hesaplamanın yapılabilmesi için bir
aracın hareket anında ihtiyaç duyduğu anlık enerji
üzerinde durulmuştur. Bu enerji, aracın hareket ederken
karşı koyduğu toplam direnç kuvvetlerine (FT) eşittir. Bu
çalışmada toplam direnç kuvvetinin üç temel direnç
kuvvetinden oluştuğu kabul edilmiştir. Bunlar;
yuvarlanma direnci FRo, aerodinamik direnç FAe, ve
ivmelenme direnci FAcc’dir. Yuvarlanma direnci FRo, araç
ağırlığı ve yuvarlanma direnci katsayısı ile doğru
orantılıdır,
ancak
aracın
hızından
bağımsız
hesaplanmaktadır. Aerodinamik direnç FAe, araç hızına ve
aracın ön yüzey alanına bağlı olarak hesaplanmaktadır.
İvmelenme direnci FAcc, aracın ivmesi ve kütlesiyle
doğru orantılıdır. İvmelenme direnci hesaplamasında, hız
formülde doğrudan yer almasa da, vites oranı (i) hıza
bağlı olarak değişmekte, vites oranının değişimi de
ivmelenme direncini değiştirmektedir.
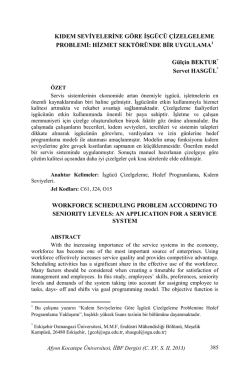
Yakıt tüketimi hesaplaması için geliştirilen
algoritmanın pseudo kodu Şekil 1’de yer almaktadır.
3. YAKIT TÜKETİMİ HESAPLAMA
ALGORİTMASI
Bu çalışmada, araçların belirli bir mesafe arasında
tükettiği yakıt miktarının hesaplanabilmesi için araçlara
ait teknik özellikler, gidilen mesafe ve araç ağırlığı göz
BAŞLA
Tekerlek çapını hesapla
Vites oranlarını kullanarak hız aralıklarını belirle
Hız-zaman grafiğini çiz
t1, t2, t3, A1, A2, A3 belirle
EĞER A1+A2>Toplam mesafe ise
O HALDE t1, t2, t3 değerlerini düzenle
FRo hesapla
For i=1 to t1
FAe hesapla
i. saniyedeki hıza göre FAcc hesapla
i. saniyedeki hıza göre FT hesapla
i. saniyedeki yakıt tüketimini hesapla ve toplam yakıt tüketimine ekle
NEXT
EĞER t1<t2 O HALDE
Hız sınırında FAe hesapla
Hız sınırında FT hesapla
{t1-t2} zaman aralığı için yakıt tüketimini hesapla ve toplam tüketime ekle
END IF
For i=t2+1 to t3
FAe hesapla
i. saniyedeki hıza göre FT hesapla
i. saniyedeki yakıt tüketimini hesapla ve toplam yakıt tüketimine ekle
NEXT
SON
Şekil 1. Yakıt tüketim algoritması
3
4. PROBLEM TANIMI ve MATEMATİKSEL
MODEL
M
Yapılan çalışmada araç rotalama problemi, lojistik
faaliyetlerde toplam yakıt tüketimini minimize etmek
amacıyla farklı tipte araçları içeren heterojen filolar için
incelenmiştir. Problemde iki ana kısıt dikkate alınmıştır.
Bunlardan ilki, literatürde sıklıkla kullanılan zaman
penceresi kısıtıdır. Bu kısıt ile birlikte, dağıtım
noktalarının talepleri doğrultusunda farklı teslimat
zamanları göz önüne alınmıştır. İkinci kısıt ise araç
ağırlığını ve yakıt deposunu ayrı ayrı dikkate alan
kapasite kısıtlarıdır. Bu kısıtlar dahilinde probleme ait
varsayımlar aşağıda verilmektedir:
Bir turda her dağıtım noktasına sadece bir araç ile
ve bir kez servis verilebilir,
Müşteri noktalarına dağıtım yapacak araçlar, sadece
müşterilerin belirlediği zaman aralığı içerisinde
hizmet verebilir,
Her aracın bir ağırlık kapasitesi vardır ve bir aracın
rotasında yer alan müşterilerin toplam taleplerinin
ağırlığı aracın ağırlık kapasitesini aşamaz,
Her aracın bir yakıt deposu kapasitesi vardır ve bir
aracın rotası boyunca tüketeceği yakıt miktarı aracın
yakıt deposu kapasitesini aşamaz.
Büyük bir sayı
k aracının boş ağırlığı
k aracının azami ağırlığı
Karar Değişkenleri
yik
fik
wi
araçların rotalarını tanımlayan {0, 1} tam sayılı
değişken. Eğer bir k aracı i düğümünden j
)
düğümüne giderse 1, aksi halde 0: (
k aracının i noktasından ayrıldığı andaki ağırlığı
k aracının i noktasından ayrıldığı andaki yakıt
deposu seviyesi
i noktasında servise başlama zamanı
Model
∑∑∑
∑∑∑
∑∑
{
} ( )
∑
{
}
( )
{
}
( )
{
}
{
}
( )
{
}
( )
{
}
( )
∑
∑
{
}
(
)
{
İndisler
}
(
Taşımalarla ilgili noktalar kümesi
Filodaki araçlar kümesi
)
{
Parametreler
cij
tij
ei
li
pi
di
Qk
( )
Kısıtlar
Yukarıda tanımlanan varsayımlara ek olarak
problemde iki lokasyon arasında yapılacak olan taşımada
yakıt tüketim değeri, yakıt tüketimi hesaplama
algoritmasından elde edilen doğrusal regresyon denklemi
ile hesaplanmaktadır. Araç ağırlığı ve aracın gideceği
mesafeyi dikkate alan doğrusal regresyon denklemi her
araç için ayrı ayrı oluşturulmuştur.
Doğrusal regresyon denklemi ile yakıt tüketimi
hesaplamalarına dayalı, farklı yük ve yakıt deposu
kapasitesine sahip heterojen araç filolu ve zaman
pencereli yeşil araç rotalama problemine ilişkin
geliştirilen karışık tam sayılı matematiksel model
aşağıda verilmiştir.
N
K
∑∑∑
i noktasından j noktasına olan uzaklık
i noktasından j noktasına olan ulaşım süresi
i noktasına ait olan zaman pencere alt sınırı
i noktasına ait olan zaman pencere üst sınırı
i noktasına ait servis süresi
i noktasına ait talep miktarı
k aracının yakıt deposu kapasitesi
k aracının regresyon denklemine ait olan
mesafeye bağlı katsayısı
k aracının regresyon denklemine ait olan araç
ağırlığına bağlı katsayısı
k aracının regresyon denklemine ait olan sabit
değer
}
(
)
{
}
{
}
{
}
( )
{
}
( )
{
} (
)
}(
)
} (
)
(
)
{
}
(
{
}
{
)
}
{
(
{
4
}
{
)
{
{
}
} (
)
(
)
(
)
değişkeni 0 değerini alacağından
değişkeninin
kullanılmasına gerek kalmamaktadır. Aksi halde,
değerini aldığından
değişkeni de pozitif bir
değer almak zorundadır. Bu nedenle araç ağırlığına bağlı
hesaplamanın yapıldığı matematiksel ifadede
değişkenini çıkartarak amaç fonksiyonu doğrusal hale
getirilmiştir.
Kısıt (2), bir müşteri noktasına sadece bir defa ve bir
araçla servis verilebilmesi koşulunu sağlamaktadır. Kısıt
(3), bir aracın bir rotada kullanılıp kullanılmadığını
belirlemektedir. Kısıt (4), rotaların sürekliliğini
sağlamaktadır. Eğer bir müşteri noktasına k aracı ile
gelindi ise yine k aracı ile bu müşteri noktasının terk
edilmesi sağlanmaktadır. Kısıt (5) ve (6), her bir aracın
müşteri ve depo noktalarında müşteri taleplerine göre
ağırlıklarını belirlemektedir. Kısıt (7), araç kapasite
kısıtını sağlamaktadır. Bir aracın rotasında bulunan
müşteri taleplerinin toplamı araç kapasitesini aşamaz.
Araçlar depodan çıkmadan önce rotalarına ait bütün
müşterilerin taleplerine göre yüklenmekte ve rotanın son
müşterisine de uğradıktan sonra boş olarak depoya
dönmektedir. Kısıt (8 – 10), problemde zaman penceresi
kısıtlarını sağlamaktadır. Bir müşteri noktasına,
müşterinin istemiş olduğu zaman aralıkları dışında servis
verilemez. Kısıt (11) ve (12), her bir aracın uğradıkları
müşteri noktalarında depolarında kalan yakıt miktarlarını
belirlemektedir. Kısıt (13), yakıt deposu kapasitesini
sağlamaktadır. Bir aracın rotası boyunca harcayacağı
toplam yakıt miktarı aracın yakıt deposu kapasitesini
aşamaz.
Probleme ait amaç fonksiyonunu ifade eden eşitlik (1)
ile farklı tipteki araçların yakıt tüketimlerine ait çok
boyutlu doğrusal regresyon denklemi katsayıları dikkate
alınarak toplam yakıt tüketimi hesaplanmaktadır. Fakat
tanımlanan amaç fonksiyonunda, regresyon denklemi
doğrusal olmasına rağmen, ağırlığın dikkate alındığı
matematiksel ifadede iki farklı karar değişkeninin (
ve
) birbirleriyle çarpılmasından dolayı doğrusal
olmayan bir yapı ortaya çıkmaktadır. Doğrusal olmayan
amaç fonksiyonu, eşitlik (16) ile doğrusal hale
getirilmiştir. Probleme ait matematiksel model, bir en
küçükleme modeli olduğundan, doğrusal yapıyı bozan
matematiksel ifadede bir i noktasına k aracı uğramaz ise
∑∑∑
∑∑
∑∑∑
(
)
5. SAYISAL UYGULAMALAR
Geliştirilen karışık tamsayılı matematiksel modelin
geçerliliğini ve performansını test edebilmek için
literatürde sıklıkla kullanılan Solomon’un R1 tip zaman
pencereli araç rotalama problemlerine ait örnek problem
seti kullanılmıştır. R1 tip örnek problem seti 12 farklı
problemden oluşmaktadır. Her bir örnek problem, rassal
olarak konumlandırılmış müşteri noktaları kümesi ve bir
adet merkezde konumlandırılmış depo noktasından
oluşmaktadır (Solomon, 1987). Problem setlerinde her
bir müşteri ve depo noktasına ait koordinat bilgisi, talep
miktarı ve servis verilecek zaman aralığı bilgisi yer
almaktadır. Müşterilere hizmet verecek araçların
kapasiteleri ise tek tip olarak yer almaktadır. Yapılan bu
çalışmada farklı tipte araçların yakıt tüketimleri dikkate
alınacağından, Solomon’un problem seti incelenen
probleme göre düzenlenmiştir. Bu nedenle; örnek
problemlerde kullanılmak üzere, gerçek hayatta yer alan
sekiz farklı hafif ticari araca ait teknik veriler
toplanmıştır. Yakıt tüketim hesaplama algoritması
kullanılarak farklı ağırlık ve mesafe koşullarında
araçlara ait yakıt tüketim değerleri elde edilmiş ve bu
değerler sonucunda her bir aracın yakıt tüketimine ait
doğrusal regresyon denklemi elde edilmiştir. Araçlara ait
kapasite özellikleri ve elde edilen regresyon denklemleri
Tablo 1’de verilmiştir.
Tablo1. Araçlara ait kapasite değerleri ve elde edilen regresyon denklemleri
Araç No Boş Araç Maksimum Araç Araç Yakıt Depo
Yakıt Tüketim
k
Ağırlığı (kg)
Ağırlığı (kg)
Kapasitesi (lt)
Denklemi
1
1380
2090
60
2
1900
3500
76
3
1400
2270
60
4
1950
2950
65
5
1800
2820
80
6
1675
2940
75
7
2320
3700
80
8
1920
3300
80
5
Yapılan
sayısal
uygulamalarda
geliştirilen
matematiksel modelin geçerliliği, 100 müşteri noktasına
kadar veri içeren Solomon’un R1 tip örnek problem seti
kullanılarak test edilmiştir. Fakat, klasik araç rotalama
probleminin NP-zor bir yapıya sahip olması ve incelenen
probleme ait kısıtların problemi daha da zor bir yapıya
sokması nedeniyle büyük ölçekli problemlerde kabul
edilebilir zaman dilimleri içerisinde optimum sonuçlara
ulaşılamamıştır. Bu sebeple her bir problem için ilk 15
talep noktası dikkate alınarak problem boyutları
küçültülmüş ve sonuçlar analiz edilmiştir. CPLEX 12.4.0
Problem Tipi
R101_15
R102_15
R103_15
R104_15
R105_15
R106_15
R107_15
R108_15
R109_15
R110_15
R111_15
R112_15
ile elde edilen 12 ayrı probleme ait sonuçlar Tablo 2’de
yer almaktadır. Zaman penceresi, araç kapasite ve yakıt
depo kapasitesi açısından kontrol edilen her bir çözümün
problem kısıtlarına uygun sonuçlar verdiği tespit
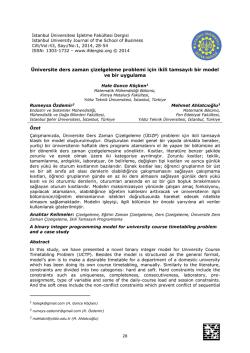
edilmiştir. Örnek bir gösterim olarak R101_15
probleminin çözümü Şekil 2’de verilmiştir. Tablo 3’te ise
bu çözüme ait araç kapasite karar değişkenleri yer
almaktadır. Elde edilen çözümler işlem süreleri açısından
incelendiğinde, CPLEX’in işlem süreleri problem tipine
göre değişkenlik göstermekle birlikte ortalama bir saatten
az bir sürede optimum sonuca ulaşılabilmektedir.
Tablo 2. Sayısal uygulamalara ait sonuçlar
Toplam Yakıt Tüketimi
Toplam Mesafe
(lt)
(km)
Kullanılan Araç Sayısı
247.4462
3837
5
188.7845
3515
4
188.7845
3515
4
161.4886
3013
3
216.2453
3590
4
174.4580
3296
3
169.8803
3216
3
153.0249
2780
3
192.9996
3523
4
156.6735
2055
3
168.8709
3209
3
151.7349
2816
3
İşlem Süresi
(sn)
0.56
1405.00
6336.00
5180.00
3.42
3269.00
5165.00
5999.00
408.00
1422.00
5450.00
7620.00
Tablo 3. Heterojen filolu araç rotalarına ait örnek problemin yük dağıtım ve yakıt tüketimi sonuçları
Araç 1 Rota
0
→
14
→
15
→
6
→
0
41.2220
21.3534
6.4881
(lt) 60.0000
1435
1395
1380
(kg) 1535
Araç 3 Rota
0
→
5
→
7
→
8
→
45.6402
26.4810
18.0726
(lt) 60.0000
1470
1445
1400
(kg) 1600
Araç 4 Rota
0
→
2
→
13
→
49.1993
9.7547
(lt) 65.0000
2065
1950
(kg) 2100
0
-
0
-
Araç 5 Rota
0
→
11
→
10
→
1
→
49.8230
27.5820
13.5914
(lt) 80.0000
1930
1850
1800
(kg) 1990
0
-
Araç 7 Rota
0
→
12
→
9
→
3
→
4
→ 0
73.9685
25.2219
19.3473
9.6310
(lt) 80.0000
2560
2480
2415
2320
(kg) 2655
6
11
10
9
7
1
3
8
Araç 5
DEPO
Araç 3
5
6
Araç 7
12
Araç 1
Araç 4
13
4
2
14
15
Şekil 2. Yeşil araç rotalama optimizasyonu için heterojen filodaki araç rotalarına ait örnek bir gösterim
6. SONUÇ
KAYNAKLAR
1. EEA, 2011. EEA Greenhouse Gas Data.
<http://dataservice.eea.europa.eu/PivotApp/pivot.as
px?pivotid=475>.
2. Dekker, R., Bloemhof, J. Mallidis,I., 2012,
“Operations Research for Green Logistics – An
Overview of Aspects, Issues, Contributions and
Challenges”, European Journal of Operational
Research, Vol. 219, No. 3, pp. 671-679.
3. Dantzig, G. B., Ramser, T. H., 1959, “The Truck
Dispatching Problem”, Management Science, Vol.
6, No.1, pp. 80-91.
4. Clarke, G., Wright, J.W., 1964, “Scheduling of
Vehicles From a Central Depot to a Number of
Delivery Points”, Operations Research, Vol.12, pp.
568–581.
5. Kritikos, M.N., Ioannou, G., 2010, “The Balanced
Cargo Vehicle Routing Problem with Time
Windows”, International Journal of Production
Economics, Vol. 123, pp. 42–51.
6. Bodin, L.D., 1990, “Twenty Years of Routing and
Scheduling”, Operations Research, Vol. 38, No. 4,
pp. 571-579.
7. Toth, P., Vigo, D., 2002, “The Vehicle Routing
Problem”, SIAM. Philadelphia: PA.
Bu çalışmada, yeşil araç rotalama probleminde toplam
yakıt tüketimini ve dolayısıyla CO2 emisyon miktarını
azaltmak amacıyla karışık tam sayılı matematiksel model
geliştirilmiştir. Geliştirilen matematiksel model, yakıt
tüketimi hesaplama algoritması ile entegre edilmiş, farklı
kapasitelerdeki araçlar için zaman kısıtını da dikkate
alarak en düşük yakıt tüketimini veren rotalar
oluşturmuştur. Geliştirilen modelin geçerliliğini test
edebilmek için literatürde sıkça kullanılan örnek problem
kümesi ile model çözdürülmüş, geliştirilen modelin
optimal sonucu verdiği gözlenmiştir. Oluşturulan model
sayesinde lojistik faaliyetlerinde harcanan enerji
miktarında azalma sağlanacaktır.
Ayrıca taşıma
faaliyetlerinde uygun filo seçimi ve rota planları
sayesinde çevreye salınan CO2 (ve diğer) emisyon
miktarlarında azalma sağlanacağı düşünülmektedir.
TEŞEKKÜR
Bu araştırma Uludağ Üniversitesi Bilimsel Araştırma
Projeleri Komisyonu tarafından desteklenmiştir. Proje
No: KUAP(M)-2012/53
7
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
Cordeau, J.F., Maischberger, M., 2012, “A Parallel
Iterated Tabu Search Heuristic for Vehicle
Routing Problems, Computers and Operations
Research, Vol. 39, 2033–2050.
Almoustafa, S., Hanafi, S., Mladenovic, N., 2013,
“New Exact Method for Large Asymmetric
Distance-Constrained Vehicle Routing Problem”,
European Journal of Operational Research, Vol.
226, pp. 386–394.
Solomon, M.M., 1987, “Algorithms for the
Vehicle Routing and Scheduling Problems with
Time
Windows
Constraints”,
Operations
Research, Vol. 35, No. 2, pp. 254-265.
Lau, H. C., Sim, M., Teo, K.M., 2003, “Vehicle
Routing Problem with Time Windows and a
Limited Number of Vehicles”, European Journal
of Operational Research, Vol. 148, pp.559–569.
Moon, I., Lee, J.H., Seong, J., 2012, “Vehicle
Routing Problem with Time Windows
Considering
Overtime
and
Outsourcing
Vehicles”, Expert Systems with Applications, Vol.
39, pp.13202–13213.
Agra, A., Christiansen, M., Figueiredo, R., Hvattum,
L.M., Poss, M., Requejo, C., 2013, “The Robust
Vehicle Routing Problem with Time Windows”,
Computers and Operations Research, Vol. 40,
pp.856-866.
Tan, K.C., Lee, L.H., Zhu, Q.L., Ou ,K., 2001,
“Heuristic Methods for Vehicle Routing Problem
with Time Windows”, Artificial Intelligence in
Engineering, Vol.15, pp.281-295.
Lin, C., Choy, K.L., Ho, G.T.S., Chung, S.H., Lam,
H.Y., 2014, “Survey of Green Vehicle Routing
Problem: Past and Future Trends”, Expert
Systems with Applications, Vol. 41, pp. 1118–1138.
Kuo, Y., 2010, “Using Simulated Annealing to
Minimize Fuel
Consumption for the TimeDependent Vehicle Routing Problem”, Computers
and Industrial Engineering, Vol. 59, pp.157-165.
Bektaş, T.,, Laporte, G., 2011, “The PollutionRouting Problem”, Transportation Research Part
B, Vol. 45, pp.1232-1250.
Suzuki, Y., 2011, “A New Truck-Routing
Approach for Reducing Fuel Consumption and
Pollutants Emission”, Transportation Research Part
D, Vol. 16, pp.73-77.
Xiao, Y., Zhao, Q., Kaku, I., Xu, Y., 2012,
“Development
of
a
Fuel
Consumption
Optimization Model for the Capacitated Vehicle
Routing Problem”, Computers and Operations
Research, Vol. 39. pp.1419-1431.
Erdoğan, S., Hooks, E.M., 2012, “A Green Vehicle
Routing Problem”, Transportation Research Part E,
Vol.48, pp. 100-114.
Apaydın, Ö., Gönüllü, M.T., 2008, “Emission
Control with Route Optimization in Solid Waste
Collection Process: A Case Study.”, Sadhana
Vol.33, No. 2, pp.71-82.
22. Wygonik, E., Goodchild, A., 2011, “Evaluating
CO2 Emissions, Cost, and Service Quality Tradeoffs in an Urban Delivery System Case Study”,
IATTS Research, Vol. 35, pp.7-15.
23. Jabali, O., Van Woensel, T., Kok, A.G., 2012,
“Analysis of Travel Times and CO2 Emissions in
Time-Dependent Vehicle Routing”, Production
and Operations Management, Vol. 21, No. 6,
pp.1060-1074.
24. Pradenas, L., Oportus, B., Parada, V., 2013,
“Mitigation of Greenhouse Gas Emissions in
Vehicle Routing Problems with Backhauling”,
Expert Systems with Applications, Vol. 40,
pp.2985-2991.
25. Wu, Y., Zhao, P., Zhang, H., Wang, Y., Mao, G.,
2012, “Assessment for Fuel Consumption and
Exhaust Emissions of China’s Vehicles: Future
Trends and Policy Implications”,
Scientific
World Journal, Article ID 591343.
26. Küçükoğlu, İ., Ene, S., Aksoy, A., Öztürk, N., 2013,
“A Green Capacitated Vehicle Routing Problem
with Fuel Consumption Optimization Model”,
International Journal of Computational Engineering
Research, Vol. 3, No.7, pp.16-23.
27. Demir, E., Bektas, T., Laporte, G., 2014, “The Biobjective Pollution-Routing Problem”, European
Journal of Operational Research, Vol. 232, pp.464–
478.
28. Jovanovic, A.D., Pamucar, D.S., Pejcic-Tarle, S.,
2014, “Green Vehicle Routing in Urban Zones –
A Neuro-Fuzzy Approach”, Expert Systems with
Applications, Vol. 41, pp.3189–3203.
29. Imran, A., Salhi, S., Wassan, N.A., 2009, “A
Variable Neighborhood-Based Heuristic for the
Heterogeneous Fleet Vehicle Routing Problem”,
European Journal of Operational Research, Vol.
197, pp. 509–518.
30. Brandao, J., 2011, “A Tabu Search Algorithm for
the Heterogeneous Fixed Fleet Vehicle Routing
Problem”, Computers and Operations Research,
Vol.38, pp.140–151.
31. Belfiore, P., Yoshizaki, H.T.Y., 2009, “Scatter
Search for a Real-Life Heterogeneous Fleet
Vehicle Routing Problem with Time Windows
and Split Deliveries in Brazil”, European Journal
of Operational Research, Vol.199, pp.750–758.
8
© Copyright 2026 Paperzz