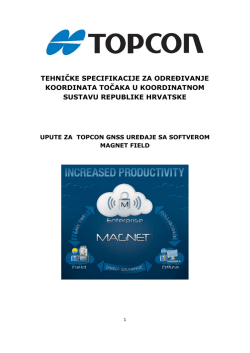
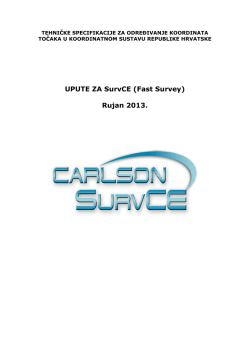
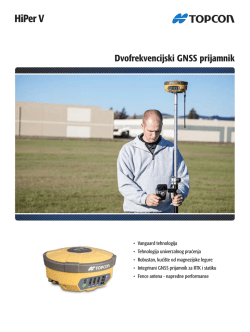
1 NAVSTAR GLOBALNI POZICIONI SISTEM Poglavlje 1 NAVSTAR GLOBALNI POZICIONI SISTEM 1.1 Opšte karakteristike NAVSTAR sistema 1.1.1 NAVSTAR GPS program 1$967$5 *OREDOQL 3R]LFLRQL 6LVWHP *36 MH VDWHOLWVNL VLVWHP UD]YLMHQ RG VWUDQH DPHULþNRJ Ministarstva odbrane (DOD), sa osnovnim ciljem dD RPRJXüL SR]LFLRQLUDQMH QDYLJDFLMX L WUDQVIHU vremena za vojne potrebe. Iako postoji više kako projektovanih tako i operativnih globalnih pozicionih VLVWHPD NDR ãWR MH IUDQFXVNL '25,6 QHPDþNL 35$5( UXVNL */21$66 LOL HYURSVNL *$/,/(2 VNUDüHQLFD*36MH danas sinonim za satelitski sistem NAVSTAR. 3RþHFL 1$967$5SURMHNWDVHåXXUDQHVHGDPGHVHWHJRGLQHNDGDMH'2'IRUPLUDORSRVHEQXVOXåEX -32VDVWDYOMHQXRGSUHGVWDYQLNDVYLKURGRYDDPHULþNHYRMVNHVD]DGDWNRPGDUD]PRWULPRJXüQRVW razvoja novog višekoriVQLþNRJVDWHOLWVNRJQDYLJDFLRQRJVLVWHPDParkinson 19968WRYUHPHYHüVX SRVWRMDOD WUL YDåQD SURJUDPD þLMH VX NRPSRQHQWH PRJOH þLQLWL RVQRYX EXGXüHJ *36 5HDOL]DFLMD QDMVWDULMHJ RG QMLK 1166 75$16,7 ]DSRþHWD MH MRã JRGLQH NDR RGJRYRU QD VRYMHWVko ODQVLUDQMH SUYRJ YHãWDþNRJ VDWHOLWD 63871,. D JRGLQH MRã VX IXQNFLRQLVDOD GYD VDWHOLWD RYRJ VLVWHPD 8 PH XYUHPHQX VX ]D QDYLJDFLRQH SRWUHEH PRUQDULþNLK L YD]GXKRSORYQLK VQDJD UD]YLMHQD GYD VDWHOLWVND VLVWHPD 7,0$7,21 L % ]QDþDMQD L]PH X RVtalog i po tome što su osobine DWRPVNLKþDVRYQLNDSRSUYLSXWSURYHUHQHXNRVPLþNLPXVORYLPD 3UHGORåHQL1$967$5*36SURJUDPSRGUD]XPHYDRMHQDYLJDFLRQLVLVWHPED]LUDQQDNRQVWHODFLMLRG 24 satelita smeštenih u 6 orbitalnih ravni, i upotrebi elektromagnetnih talasa iz radio frekventnog RSVHJD 2G 75$16,7 VLVWHPD SUHX]HWL VX DOJRULWPL ]D SURJQR]X VDWHOLWVNLK SRORåDMD D RG VLVWHPD TIMATION i 621B orbitalna konfiguracija, struktura signala i frekvencije. Raspored i orijentacija satelitskih putanja izabrani su tako da obezbede elektronsku vidljivost najmanje 4 satelita u bilo kom WUHQXWNX YUHPHQD L VD ELOR NRMH WDþNH =HPOMLQH SRYUãL 2VLP WRJD SUHGYL HQD MH XSRWUHED GYH IUHNYHQFLMH ]ERJ MRQRVIHUVNLK XWLFDMD L MHGQRVPHUQR IXQNFLRQLVDQMH VLVWHPD þLPH MH RPRJXüHn QHRJUDQLþHQ EURM NRULVQLND .DGD MH GHFHPEUD JRGLQH RYDNDY NRQFHSW GRELR L IRUPDOQR RGREUHQMHQDGOHåQHVOXåEH'6$5&GDOMLUD]YRMSURJUDPDRGYLMDRVHYHRPDGLQDPLþQR 1974 - Sa korporacijom Rockwell International sklopljen je ugovor o izgradQML þHWLUL VDWHOLWVND SURWRWLSD SUYH JHQHUDFLMH 2GUH HQ MH WLS UDNHWD QRVDþD L]DEUDQH WUL YUVWH SULMHPQLND ]DSRþHWRVDNRQVWUXNFLMRPNRQWUROQRJVHJPHQWDLL]UD HQLSODQRYLWHVWLUDQMDVLVWHPD 1978 - Lansiran je prvi operativni satelitski prototip BlocN , 7HVWLUDQMH NRULVQLþNH RSUHPH prošireno je na petokanalne prijemnike firmi Texas Instruments i Rockwell Collins. 1990 - 8YHGHQD MH SUYD PHUD ]DãWLWH 6$ NRMRP VH NRQWUROLVDQR GHJUDGLUD WDþQRVW VDWHOLWVNRJ oscilatora i navigacione poruke, tako da se QDYLJDFLRQD WDþQRVW QHRYODãüHQLK NRULVQLND RJUDQLþDYDQDQRPLQDOQLKm u horizontalnom i 156m u vertikalnom smislu. 1993 - ,]JUD HQDMHXFHORVWLNRQVWHODFLMDRGRUELWDOQLKUDYQLVDXNXSQRVDWHOLWD 1994 - Uvedena je druga mera zaštite (AS) kojoP MH ãLIURYDQ SUHFL]QL NRG þLPH MH GRGDWQR GHJUDGLUDQDQDYLJDFLRQDWDþQRVWQHRYODãüHQLKNRULVQLND '%ODJRMHYLü: M GLOBALNOG POZICIONOG SISTEMA ... (DOKTORSKA DISERTACIJA) 7 1.1 Opšte karakteristike NAVSTAR sistema 1995 - Formalno je proglašena potpuna operativnost sistema (FOC). 2000 - 3UHGVHGQLþNLPXND]RPXNLQXWDMH6$PHUD]DãWLWH Iako je NAVSTAR iniciran kao vojni program, veoma rano je prepoznat veliki potencijal sistema za SULPHQH X FLYLOQRP VHNWRUX 0RJXüQRVWL ID]QLK PHUHQMD L SUHFL]QRJ JHRGHWVNRJ UHODWLYQRJ SR]LFLRQLUDQMDIRUPXOLVDQHVXQDVWUXþQLPLQDXþQLPVNXSRYLPDMRãJRGLQHCounselman et al. 1979WDNRGDYHüSRVWRMHQDWUåLãWXVSHFLMDOL]RYDQLJHRGHWVNLSULMHPQLFLWULSURL]YR DþD3RG SULWLVNRP FLYLOQLK LQVWLWXFLMD L SRMHGLQDFD NRML GDQDV þLQH YLãH RG XNXSQRJ EURMD NRULVQLND LGHQWLILNRYDQLVXVOHGHüLYDåQLMLHOHPHQWLSODQDPRGHUQL]DFije NAVSTAR programa do 2020. godine: • • • 8YR HQMH QRYLK VLJQDOD L NRGRYD þLPH üH VH X ]QDWQRM PHUL SRYHüDWL VSHNWDU NRULVQLND L SULPHQD 1DURþLWH LPSOLNDFLMH X WRP SRJOHGX LPDüH UHDOL]DFLMD GUXJH FLYLOQH IUHNYHQFLMH najavljene 1996. godine, i napuštanje poliWLNH$6L6$]DãWLWH2VLPWRJDSUHGYL HQRMHLGD neki od komunikacionih satelita budu osposobljeni za emitovanje GPS signala. 3RYHüDQMH EURMD VDWHOLWD L QMLKRYLK WHKQRORãNLK PRJXüQRVWL NRMH üH ]D SRVOHGLFX LPDWL poboljšanje pouzdanosti, dostupnosti i ukupnog funkcionisanja sistema. Planira se da nove GPS satelitske generacije budu u velikoj meri funkcionalno autonomne i sa minimalnom interakcijom kada je u pitanju Zemaljska kontrola. Integracija GPS u kompleksnije sisteme (na primer WAAS), proširenje kompatibilnosti sa GUXJLP SRVWRMHüLP VDWHOLWVNLP VLVWHPLPD L SREROMãDQMH NRQWUROQRJ VHJPHQWD þLPH üH VH SRYHüDWLSRX]GDQRVWNRGNULWLþQLKDSOLNDFLMDNDRãWRMHFLYLOQDYD]GXKRSORYQDQDYLJDFLMD Razvoj i modernizacija jednog tako kompleksnog programa kao što je NAVSTAR otvaraju mnoga ]QDþDMQD SLWDQMD SRþHY RG ILQDQVLUDQMD L RGUåDYDQMD GHILQLFLMH VSHNWUD QDFLRQDOQH EH]EHGQRVWL PH XQDURGQH LQVWLWXFLRQDOQH LQIUDVWUXNWXUH SRWUHEQH ]D XSUDYOMDQMH VLVWHPRP SD VYH GR SUREOHPD vojnog porekla sistema i monopola nad takvim resursom kao što je globalna satelitska radio QDYLJDFLMD8NROLNRVHQDYHGHQHWHãNRüHSUHYD]L XLRVWYDUHSODQRYLPRGHUQL]DFLMH1$967$5*36 ELüHSRWYU HQNDRGHIDNWRVWDQGDUGXGRPHQXVDWHOLWVNHQDYLJDFLRQHWHKQRORJLMHLþLQLüHGRPLQDQWQX kompRQHQWXVYDNRJEXGXüHJ*166VLVWHPD 1.1.2 Referentni GPS sistem Rezultati GPS pozicioniranja i navigacije odnose se na referentni sistem WGS84. Potpuna definicija ovog referentnog sistema obuhvata komponente kao što su koordinatni sistem, elipsoidni i gravitacioni PRGHO=HPOMHVLVWHPYUHPHQDLGHILQLFLRQLLL]YHGHQLJHRPHWULMVNLLIL]LþNLSDUDPHWULtabela 1.1). TABELA 1.1. 'HILQLFLRQLJHRPHWULMVNLLIL]LþNLSDUDPHWUL:*6 Parametar Velika poluosa 5HFLSURþQDYUHGQRVt spljoštenosti Uglovna brzina *HRFHQWULþQDJUDYLWDFLRQDNRQVWDQWD Zonalni harmonik drugog stepena Mala poluosa 3UYLQXPHULþNLHNVFentricitet Normalni potencijal Normalno ubrzanje na ekvatoru Masa Zemlje sa atmosferom 8 '%ODJRMHYLüM Vrednost 6378137.0m 298.257223563 7292115.0 ⋅10 −11 rad ⋅ s −1 3986004.418 ⋅108 m 3 s −2 − 0.484166774985 ⋅10 −3 6356752.3142m 8.1819190842622 ⋅10 −2 62636860.8497 m 2 s −2 9.7803253359ms −2 5.9733328 ⋅10 24 kg GLOBALNOG POZICIONOG SISTEMA ... (DOKTORSKA DISERTACIJA) 1 NAVSTAR GLOBALNI POZICIONI SISTEM WGS84 koordinatni sistem je desno orijentisani pravougli koordinatni VLVWHP VD SRþHWNRP X FHQWUX PDVH=HPOMHORNDOQRPUD]PHURPXVPLVOXUHODWLYLVWLþNHWHRULMHJUDYLWDFLMHLRULMHQWDFLMRPRGUH HQRP RGVWUDQH0H XQDURGQHVOXåEHYUHPHQD%,+]DHSRKXJRGLQH1HVLJXUQRVWRULMHQWDFLMHL]QRVL oko 0.005’’, a njena vremenska evolucija po definiciji ne rezultira nikakvom globalnom rezidualnom rotacijom u odnosu na Zemljinu koru (NIMA 1997). 5HDOL]DFLMD:*6UHIHUHQWQHRVQRYHRGQRVQRVNXSDJOREDOQRUDVSRUH HQLKIXQGDPHQWDOQLKVWDQLFD VDSULSDGDMXüLPNRRUGLQDWDPDL]YUãHQDje prvi put 1987. godine doplerskim TRANSIT merenjima sa WDþQRãüX RG RNR m 3RVOHGQMH RGUH LYDQMH L] JRGLQH NRMH MH SR]QDWR SRG LPHQRP * SRND]XMH VDJODVQRVW VD PH XQDURGQRP WHUHVWULþNRP UHIHUHQWQRP RVQRYRP ,75) QD QLYRX WDþQRVWL od 5cm po koordinatnim osama. .RRUGLQDWQLSRþHWDNL=-RVDSUDYRXJORJ:*6VLVWHPDVOXåHLNDRRVQRYDGHILQLFLMHJHRPHWULMVNRJ centra i male poluose WGS84 elipsoidnog modela Zemlje. Izbor definicionih parametara izvršen je po XJOHGX QD SULVWXS 0H XQDURGQH JHRGHWVNH L JHRIL]LþNH XQLMH ,8** SULOLNRP XVSRVWDYOMDQMD L usvajanja geodetskog referentnog sistema GRS80 (Moritz 1984). Jedini izuzetak u tom pogledu SUHGVWDYOMD JHRFHQWULþQD JUDYLWDFLRQD NRQVWDQWD *0 MHU VH XPHVWR RULJLQDOQH *56 YUHGQRVWL RG 3986005.0 ⋅10 8 m 3 s −2 , od 1994. godine koristi vrednost 3986004.418 ⋅108 m 3 s −2 . WGS84 se prema WRPH ]DVQLYD QD WHRULML JHRFHQWULþQRJ HNYLSRWHQFLMDOQRJ REUWQRJ HOLSVRLGD SUL þHPX MH HOLSVRLG UHIHUHQWQD SRYUã ]D JHRPHWULMVNX XSRWUHEX GRN SULGUXåHQR QRUPDOQR JUDYLWDFLRQR Solje predstavlja referentni sistem za gravimetriju i satelitsku geodeziju. :*6JUDYLWDFLRQLPRGHO=HPOMHSRGQD]LYRP(*0VDGUåLXNXSQRNRHILFLMHQWVIHUQRharmonijskog razvoja Zemljinog potencijala do stepena i reda 360 (slika 1.12GUH LYDQMH vrednosti NRHILFLMHQDWD UH]XOWDW MH ]DMHGQLþNRJ 1,0$1$6$ QDSRUD QD SULNXSOMDQMX DQDOL]L L NRPELQDFLML WHUHVWULþNLK JUDYLPHWULMVNLK SRGDWDND L RSDåDQMD SUHPD VDWHOLWLPD /DJHRV /DJHRV-2, Ajisai, Starlette, GEOS-1 i GEOSAT (Lemoine et al. 1997). Realizacija geoidne površi na osnovu geopotencijalnog PRGHOD(*0LPDJOREDOQXWDþQRVWNRMDVHNUHüHXUDVSRQXRGm do 1m. SLIKA 1.1. WGS84 geoid. )XQNFLRQLVDQMH VDWHOLWVNRJVLVWHPDNDRãWRMH1$967$5]DVQLYDVHXVXãWLQLQDXSRWUHELGLQDPLþNH (TDT) i atomske (TAI) vremenske skale. Sistemi vremena koji se izvode na osnovu Zemljine rotacije 87 87 YLãH QH RGJRYDUDMX GDQDãQMLP VWDQGDUGLPDWDþQRVWLWDNRGDVHNRULVWH VDPRSRVUHGQR]D '%ODJRMHYLü: M GLOBALNOG POZICIONOG SISTEMA ... (DOKTORSKA DISERTACIJA) 9 1.1 Opšte karakteristike NAVSTAR sistema LQWHUSRODFLMX VDWHOLWVNLK SRORåDMD 2GQRVL SRMHGLQLK YUHPHQVNLK VNDOD XJlavnom su rezultat PH XQDURGQLKNRQYHQFLMDslika 1.2). 'LQDPLþNR YUHPH SRWUHEQR MH ]D RSLVLYDQMH NUHWDQMD WHOD X RGUH HQRP UHIHUHQWQRP VLVWHPX VKRGQR RGJRYDUDMXüRM WHRULML JUDYLWDFLMH 2VQRYQH NRQFHSWH X WRP VPLVOX GDQDV SUHGVWDYOMDMX RSãWD WHRULMD relatiYLWHWD L LQHUFLMDOQL UHIHUHQWQL VLVWHPL -HGQDþLQH NUHWDQMD YHãWDþNLK =HPOMLQLK VDWHOLWD VDGUåH WHUHVWULþNRGLQDPLþNRYUHPH7'7NDRQH]DYLVQXSURPHQOMLYXDOLVHRQRSUDNWLþQRUHDOL]XMHDWRPVNRP vremenskom skalom TAI: TDT = TAI + 32.184 s . (1.1.1) AtomVNR YUHPH RGUåDYD 0H XQDURGQL ELUR ]D WHJRYH L PHUH %,30 QD RVQRYX DQDOL]H SRGDWDND DWRPVNLKVWDQGDUGDYLãHVYHWVNLKODERUDWRULMD2VQRYQLSUREOHPXSRWUHEHDWRPVNRJYUHPHQDSUDNWLþQH je prirode jer Zemlja usporava svoju rotaciju. Da bi se izbeglo da tokom vremena TAI postane suviše nesinhronizovano sa solarnim danom (UT), uvedena je skala koordiniranog svetskog vremena (UTC) NRMHWHþHLVWRPEU]LQRPNDRLDWRPVNRDOLVHSRYUHPHQRNRULJXMHWDNR]YDQRPSUHVWXSQRPVHNXQGRP GDELVHUD]OLNDXRGQRVXQD87RGUåala u granicama manjim od 0.9s. SLIKA 1.2.0H XVREQLRGQRVUD]OLþLWLKYUHPHQVNLKVNDOD $WRPVNR YUHPH MH RVQRYD L ]D L]YR HQMH *36 VLVWHPVNRJ YUHPHQD VD NRMLP MH SR NRQYHQFLML povezano izrazom: GPS = TAI − 19 s . (1.1.2) GPS − TAI (USNO) + 19s < 1 s , (1.1.3) Sistemsko GPS vreme oGQRVL VH QD DWRPVNL VWDQGDUG DPHULþNH PRUQDULþNH RSVHUYDWRULMH 8612 D UHDOL]XMXJDþDVRYQLFLVDWHOLWDL*36NRQWUROQRJFHQWUDQDWDMQDþLQGDMHXVYDNRPWUHQXWNX V WLP ãWR VH WDþQD UD]OLND X RGQRVX QD 87&8612 HPLWXMe korisnicima u vidu dva koeficijenta. 3URL]YROMQD HSRKD *36 YUHPHQD RSHUDWLYQR VH L]UDåDYD EURMHP VHNXQGL SURWHNOLK RG SRþHWND *36 VHGPLFH RGQRVQR RG SRQRüL L]PH X VXERWH L QHGHOMH SUL þHPX EURMDQMH *36 VHGPLFD GRJRYRUQR SRþLQMHRG 10 '%ODJRMHYLüM GLOBALNOG POZICIONOG SISTEMA ... (DOKTORSKA DISERTACIJA) 1 NAVSTAR GLOBALNI POZICIONI SISTEM 1.1.3 GPS sistemske komponente 1$967$5VLVWHPþLQHVKRGQRQDYLJDFLRQRMWHUPLQRORJLMLWULYHOLNDVHJPHQWDNRVPLþNLNRQWUROQLL NRULVQLþNL 7UDGLFLRQDOQRM SRGHOL GDQDV VH GRGDMH þHWYUWL WHUHVWULþNL *36 VHJPHQW SRG NRMLP VH podrazumeva civilna infrastruktura i]JUD HQDXSRVOHGQMLKGHVHWJRGLQD .RVPLþNLVHJPHQW .RVPLþNLVHJPHQWREXKYDWD*36VDWHOLWHLQMLKRYXNRQVWHODFLMX3RþHYRGJRGLQHODQVLUDQRMH ukupno pet generacija satelita: NTS, NDS (Block I), Block II, Block IIA i Block IIR (slika 1.3). Najnovija generacija Block IIF satelita planirana je za lansiranje posle 2005. godine. *36 VDWHOLWL SUHGVWDYOMDMX SODWIRUPH ]D UDGLR SULMHPQLNH L RGDãLOMDþH UXELGLMXPVNH L FH]LMXPVNH DWRPVNHþDVRYQLNHNRPSMXWHUHLGUXJHHOHNWURQVNHXUH DMHSRWUHEQHNDNR]DSR]Lcioniranje, tako i za vojne projekte kao što je rano otkrivanje nuklearnih udara (Aparicio et al. 1996). Oni su osim toga RSUHPOMHQLVRODUQLPSDQHOLPDNRMLREH]EH XMXHOHNWULþQXHQHUJLMXUHDNFLRQLPWRþNRYLPD]DNRQWUROX stanja i mlaznim sistemom potrebnim ]D NRUHNFLMX RUELWH .ROLþLQD JRULYD L NRPSRQHQWH NRMH REH]EH XMXHQHUJLMXRJUDQLþDYDMXYHNWUDMDQMD*36VDWHOLWDQDJRGLQD%ORFN,,5VDWHOLWLXRGQRVX QD UDQLMH JHQHUDFLMH SRVHGXMX GRGDWQD VYRMVWYD NDR ãWR VX PRJXüQRVW PH XVDWHOLWVNH NRPXQLNDFLMH L AXWR1DYGL]DMQ]DãHVWRPHVHþQRDXWRQRPQRRGUH LYDQMHSXWDQMDEH]LQWHUYHQFLMHVD=HPOMH (a) (b) SLIKA 1.3. GPS sateliti (a) Block IIA, (b) Block IIR. Nominalna GPS satelitska konstelacija poznata kao GPS-24, veoma je bliska Vokerovoj familiji NUXånih orbita 24/6/1 (Walker 1977 SUL þHPX SUYL EURM R]QDþDYD XNXSDQ EURM VDWHOLWD GUXJL EURM RUELWDOQLK UDYQL D WUHüL ID]QX UD]OLNX VDWHOLWD X VXVHGQLP RUELWDPD 2YDNYD NRQVWHODFLMD REH]EH XMH globalnu pokrivenost Zemlje i vidljivost šest satelita u svakRP WUHQXWNX YUHPHQD L VD VYDNH WDþNH =HPOMLQHSRYUãL$NWXHOQD*36NRQVWHODFLMDVDGUåLVDWHOLWDRGNRMLKVXUH]HUYQDLRSWLPL]RYDQDMH ]DVOXþDMRWND]LYDQMDUDGDMHGQRJVDWHOLWD2UELWDOQHUDYQLLPDMXLQNOLQDFLMXRG 55 0 , sa putanjDPDþLMD je velika poluosa 26561.754km, a ekscentricitet blizak nuli. Period obilaska satelita iznosi 12 ]YH]GDQLKþDVRYDãWRGRYRGLGRHIHNDWDUH]RQDQFLMHVD=HPOMLQLPJUDYLWDFLRQLPSROMHP]ERJþHJDMH SRWUHEQDUHODWLYQRþHVWDNRUHNFLMDRUELWD1RPLQDOQDPH XVDWHOLWVNDLPH XRUELWDOQDOXþQDUDVWRMDQMD SURMHNWRYDQDVXWDNRGDEXGXSULEOLåQRUDYQRPHUQDtabela 1.2). '%ODJRMHYLü: M GLOBALNOG POZICIONOG SISTEMA ... (DOKTORSKA DISERTACIJA) 11 1.1 Opšte karakteristike NAVSTAR sistema TABELA 1.2. Nominalna GPS-24 satelitska konstelacija. OME – UHNWDVFHQ]LMD X]OD]QRJ þYRUD /$1 – longituda X]OD]QRJþYRUDKPV); M – srednja anomalija; DM – razlika srednjih anomalija susednih satelita. Jedinice –OXþQLVWHSHQL Orbita A-1 A-2 A-3 A-4 B-1 B-2 B-3 B-4 C-1 C-2 C-3 C-4 OME 272.847 272.847 272.847 272.847 332.847 332.847 332.847 332.847 32.847 32.847 32.847 32.847 LAN 127.85 74.68 179.63 14.69 94.27 140.46 28.78 155.98 169.73 119.69 103.62 54.57 M 268.126 161.786 11.676 41.806 80.956 173.336 309.976 204.376 111.876 11.796 339.666 241.556 DM 106.34 119.98 103.55 31.13 130.98 92.38 105.60 31.04 100.08 32.13 98.11 129.68 Orbita D-1 D-2 D-3 D-4 E-1 E-2 E-3 E-4 F-1 F-2 F-3 F-4 OME 92.847 92.847 92.847 92.847 152.847 152.847 152.847 152.847 212.847 212.847 212.847 212.847 LAN 61.40 126.51 11.37 77.47 152.31 25.09 86.82 40.63 53.23 106.40 166.39 1.46 M 135.226 265.446 35.156 167.356 197.046 302.596 66.066 333.686 238.886 345.226 105.206 135.346 DM 100.07 98.09 129.71 32.13 130.98 105.55 92.38 31.09 103.54 106.34 119.98 30.00 Kontrolni segment .RQWUROQL*36VHJPHQWVDVWRMLVHRGSHWVWDQLFD]DSUDüHQMHþHWLUL=emaljske antene za komunikaciju sa satelitima i kontrolnog centra. Operativni kontrolni sistem (OCS) aktivan je još od 1985. godine, sa ]DGDWNRP GD RGUåDYD VDWHOLWH X SUHGYL HQLP RUELWDPD NRULJXMH VWDQMD VDWHOLWVNLK þDVRYQLND L GUXJLK elektronskih komponenti, generiše navigacione poruke, i upravlja premeštanjem satelita i njihovom ]DPHQRPXVOXþDMXNYDUD 6YDND RG SHW VWDQLFD ]D SUDüHQMH &RORUDGR 6SULQJV +DZDLL $VFHQVLRQ ,VODQG 'LHJR *DUFLD Kwajalein Island) opremljena je dvofrekventnim prijemnicima i redundantnim cezijumskim IUHNYHQWQLP VWDQGDUGLPD NRML VOXåH NDR UHIHUHQWQL RVFLODWRUL 2VLP VWDQLFH +DZDLL QD RVWDOLP lokacijama nalaze se velike Zemaljske antene preko kojih se odvija komunikacija sa satelitima u Sfrekventnom opsegu (TT&C link). ColoraGR 6SULQJV MH JODYQD VWDQLFD ]D SUDüHQMH L SUHGVWDYOMD istovremeno operativni kontrolni centar. 1DMYDåQLMD IXQNFLMD NRQWUROQRJ VHJPHQWD VD VWDQRYLãWD NRULVQLND MH REH]EH HQMH QDYLJDFLRQLK podataka u realnom vremenu. Nakon prikupljanja svih izvršenih kodnih i faznih merenja, u RSHUDWLYQRPNRQWUROQRPFHQWUXVH.DOPDQRYLPILOWHURPRFHQMXMXHIHPHULGHVWDQMDþDVRYQLNDLGUXJL navigacioni parametri za svaki satelit ponaosob (Francisco 1996 6UDþXQDWL L IRUPDWL]RYDQL QDYLJDFLRQL SRGDFL XSXüXMX VH SRWRP =HPDOMVNLP DQWHQDPD NRMH LK SURVOH XMX VDWHOLWVNLP memorijama. .RULVQLþNDJUHãNDPHUHQMDSVHXGRGXåLQD85(SUHYDVKRGQR]DYLVLRGXþHVWDORVWLNRMRPVHVDWHOLWVNH PHPRULMH SXQH QDYLJDFLRQLP SRGDFLPD .RQWUROQL VHJPHQW MH GL]DMQLUDQ WDNR GD VH DåXULUDQMH navigacione SRUXNH PRåH YUãLWL WUL SXWD GQHYQR 8 QRUPDOQLP RNROQRVWLPD GRYROMQR MH GD VH WD DNWLYQRVWRGYLMDMHGQRPXWRNXGDQDMHUMHXWRPVOXþDMXJUHãNDPHUHQMDSVHXGRGXåLQDRNRm što je mnogo manje od maksimalno projektovane koja iznosi 6m. .RULVQLþNLVHJPHQW 3RGNRULVQLþNLPVHJPHQWRPSRGUD]XPHYDMXVHVYHYUVWHVWDFLRQDUQLKLSRNUHWQLK*36SULMHPQLNDNRML RSHULãX QD IL]LþNRM SRYUãL =HPOMH VXYR]HPQLP SRPRUVNLP YD]GXKRSORYQLP SODWIRUPDPD L QLVNROHWHüLP VDWHOLWLPD /(2 D VOXåH X FLYLOQH L YRMQH VYUKH 8SUNRV širokom spektru korisnika i VSHFLILþQLP SROMLPD SULPHQH SR]LFLRQLUDQMH QDYLJDFLMD WUDQVIHU YUHPHQD JHRGH]LMD JHRGLQDPLND geofizika, fizika atmosfere itd.), u arhitekturi svakog savremenog GPS prijemnika prepoznaju se standardne funkcionalne celine (slika 1.4). 12 '%ODJRMHYLüM GLOBALNOG POZICIONOG SISTEMA ... (DOKTORSKA DISERTACIJA) 1 NAVSTAR GLOBALNI POZICIONI SISTEM SLIKA 1.4. Funkcionalna blok shema GPS prijemnika. LO – lokalni oscilator; INT – interapt. Pošto se GPS merenja u principu baziraju na vremenu dolaska satelitskih signala, referentni oscilator SUHGVWDYOMD NOMXþQL IDNWRU IXQNFLRQLVDQMD *36 prijemnika. Njegov izlaz upotrebljava frekventni VLQWLVDM]HUVD]DGDWNRPGDL]YHGHYLãHORNDOQLKRVFLODWRUDLþDVRYQLNDNRMHSULMHPQLNRQGDNRULVWLNDNR ]DJHQHULVDQMHPH XIUHNYHQFLMDWDNRLSULOLNRPREUDGHSULPOMHQLKSRMDþDQLKLGLJLWDOL]RYDQLKVLJQDOa (Van Dierendonck 1996 5H]XOWDWH REUDGH þLQH NRGQH L ID]QH SVHXGRGXåLQH RGQRVL VLJQDOD L ãXPD HSRKHPHUHQMDXORNDOQRMYUHPHQVNRMVNDOLSULMHPQLNDL*36VLVWHPVNLSRGDFL]DVYDNLVDWHOLWþLMLVX VLJQDOL SUDüHQL3RãWRMH1$967$5SUHYDVKRGQRQDYLJDFLRQi sistem, prijemnik ove rezultate koristi SUHVYHJD]DUDþXQDQMHQDYLJDFLRQRJUHãHQMD3RVWRMLPH XWLPþLWDYQL]VSHFLILþQLKSULPHQD]DNRMHVH upotrebljavaju prijemnici koji umesto toga vrše transfer vremena, generišu korekcije na referentnim stanicama, prate jonosfersku aktivnost ili samo prikupljaju podatke. 7HUHVWULþNLVHJPHQW 7HUHVWULþNL VHJPHQW REXKYDWD JOREDOQH UHJLRQDOQH L ORNDOQH PUHåH SHUPDQHQWQLK *36 VWDQLFD UD]YLMHQLKSUDNWLþQRQH]DYLVQRRGVDPRJ1$967$5VLVWHPD1DM]QDþDMQLMXJOREDOQXLQIUDVWrukturu te YUVWHSUHGVWDYOMD 0H XQDURGQD*36VOXåED,*6NRMXMH0H XQDURGQDJHRGHWVNDDVRFLMDFLMD,$* uspostavila 1993. godine, sa ciljem da promoviše standarde za prikupljanje i analizu GPS podataka, i RPRJXüLJHRQDXþQDLVWUDåLYDQMDQDMãLUHJVSHNWUD ,*6VHXRSãWHPVPLVOXVDVWRMLRGNRPSRQHQWLNDRãWRVXPUHåDVWDOQRRSHUDWLYQLK*36VWDQLFDslika 1.5), centri za prikupljanje podataka, centri za analizu podataka, koordinator, centralni biro, upravni RGERULNRULVQLFLýODQVWYR,*6MHPXOWLQDFLRQDOQRLþLQHJDUD]OLþLWHRUJDQL]DFLMHGUåDYQHDJHQFLMHL univerziteti. Sedam trenutno operativnih centara za analizu podataka (COD u Švajcarskoj, EMR u .DQDGL (6$ L *)= X 1HPDþNRM -3/ 1*6 L 6,2 X $PHULFL NRRUGLQLUDQR RGUH XMX L SXEOLNXMX precizne efemeride svih aktivnih GPS satelita, parametre rotacije Zemlje (ERP), koordinate i brzine za RNRVWDOQLK,*6VWDQLFDX6,1(;IRUPDWXVWDQMDVDWHOLWVNLKLVWDQLþQLKþDVRYQLNDGLIHUHQFLMDOQD NRGQDNDãQMHQMD'&%VWDQLþQDWURSRVIHUVND]HQLWQDNDãQMHQMDLMRQosferske mape. Svi IGS rezultati RGQRVH VH QD JOREDOQL WHUHVWULþNL UHIHUHQWQL VLVWHP ,756 8 VOXþDMX */21$66 VLVWHPD SRGDWNH REH]EH XMHSHUPDQHQWQDPUHåDRGRNRVWDQLFD,*(;NRMDVH WDNR HPRåHVPDWUDWLGHORP,*6 infrastrukture. Regionalne i lokalQH SHUPDQHQWQH PUHåH NDR ãWR VX (85() LOL 6$326 SUHGVWDYOMDMX SUH VYHJD KLMHUDUKLMVNRSURJXãüHQMHJOREDOQH,*6PUHåH3RUHGWRJDãWRQHSRVUHGQRUHDOL]XMX,756RYHPUHåH LPDMXLNDUDNWHUDNWLYQHUHIHUHQWQHRVQRYHMHURPRJXüXMXNRULVQLFLPDSULVWXSPHUHQMLPD i korekcijama u realnom vremenu ili sa definisanim zakašnjenjem (Rothacher, Zebhauser 2000). '%ODJRMHYLü: M GLOBALNOG POZICIONOG SISTEMA ... (DOKTORSKA DISERTACIJA) 13 1.1 Opšte karakteristike NAVSTAR sistema SLIKA 1.5.2VQRYQD,*6PUHåDSHUPDQHQWQLKVWDQLFD 1.2 Principi GPS merenja i pozicioniranja 1.2.1 Struktura GPS signala GPS sateliti emituju radio signale na dvema frekvencijama L1 (1575.45MHz) i L2 (1226.60MHz), iz IUHNYHQWQRJ RSVHJD NRML MH 0H XQDURGQD XQLMD ]D WHOHNRPXQLNDFLMH ,78 UH]HUYLVDOD ]D VDWHOLWVNH pozicione sisteme (slika 1.6 ,]ERU NRQNUHWQLK IUHNYHQFLMD SUHGVWDYOMD NRPSURPLV L]PH X XWLFDMD jonosferskog kašnjenjaLHNVSRQHQFLMDOQR]DYLVQLKJXELWDNDVQDJHVLJQDOD5D]PDNL]PH XIUHNYHQFLMD GRYROMQR MH ãLURN GD VH PRåH JRWRYR X SRWSXQRVWL HOLPLQLVDWL MRQRVIHUVNL HIHNDW SUYRJ UHGD DOL LVWRYUHPHQRLGRYROMQRX]DNGDVHSULMHPREHIUHNYHQFLMHPRåe vršiti samo jednom antenom. SLIKA 1.6. Blok-dijagram procesa generisanja satelitskog signala. 14 '%ODJRMHYLüM GLOBALNOG POZICIONOG SISTEMA ... (DOKTORSKA DISERTACIJA) 1 NAVSTAR GLOBALNI POZICIONI SISTEM 6RE]LURPGDQRVHüLWDODVL/L/SUHGVWDYOMDMXþLVWHVLQXVQHWDODVHRQLVDPLSRVHELQHQRVHQLNDNYX LQIRUPDFLMX -HGQR]QDþQR RGUH LYDQMH GXåLQD RPRJXüHQR MH ID]QRP PRGXODFLMRP QRVHüLK WDODVD SVHXGRVOXþDMQLPNRGRYLPD351 • • &$NRGMHELQDUQDVHNYHQFDGXåLQHELWDQDIUHNYHQFLMLRGMHz, tako da mu period iznosi 1ms2YDNRPDOLSHULRGL]DEUDQMHGDELSULMHPQLFLPRJOLEU]RRWSRþHWLSUDüHQMH&$ NRGMHMHGLQVWYHQ]DVYDNL*36VDWHOLWLXJUD HQMHVDPRQDQRVHüLWDODV/ P kod predstavlja veoma dugu binarnu sekvencu (15345000 bita) na frekvenciji od 10.23MHz i sa periodom od 266.4 dana. Da bi se obezbedila jedinstvenost, svakom GPS satelitu dodeljen MHMHGQRQHGHOMQLVHJPHQWNRGD3NRGRPVXPRGXOLVDQDREDQRVHüDWDODVD 2EH YUVWH SVHXGRVOXþDMQLK NRGRYD JHQHULãX VH SR]QDWLP DOJRULWPLPD 0H XWLP ]D UD]OLNX RG &$ koda koji je uvek dostupan, P kod se u okviru AS zaštitne mere šifrira u tajni Y kod, koji je onda GLUHNWQR GRVWXSDQ VDPR RYODãüHQLP NRULVQLFLPD 1RVHüL WDODVL PRGXOLVDQL VX SRUHG WRJD L QDYLJDFLRQRP SRUXNRP NRMD VDGUåL SRGDWNH R VDWHOLWVNRP þDVRYQLNX VWDWXVX VDWHOLWD SDUDPHWULPD putanje, konstelaciji svih aktivnih satelita i stanju jonosfere (tabela 1.3). Navigaciona poruka je ELQDUQLQL]PDOHEU]LQHELWDXVHNXQGLXJUD HQX&$L3NRGWHKQLNRPELQDUQRJVDELUDQMD=D kompletnu transmisiju navigacione poruke potrebno je 12.5min DOL VH SRGDFL QHRSKRGQL ]D SRþHWQR RGUH LYDQMHSRORåDMa satelita emituju sa 1500 bitova i ponavljaju svakih 30s. TABELA 1.3. 3DUDPHWULþDVRYQLNDLRUELWHXVDVWDYXQDYLJDFLRQHSRUXNH Parametar Indikator prisustva C/A ili P koda na L2 GPS sedmica Indikator podataka P koda na L2 7DþQRVWPHUHQMDSVHXGRGXåLQD Indikator ispravnosti satelita Razlika grupnog kašnjenja P-koda na L1 i L2 Oznaka Code-Flag L2 GPS Week L2-P-Data-Flag SV-URA SV-Health TGD 6WDURVWSRGDWDNDRþDVRYQLNX 5HIHUHQWQDHSRKDþDVRYQLND AODC t0c a0 , a1 , a 2 PoOLQRPVNLNRHILFLMHQWLSRSUDYNHþDVRYQLND Starost podataka o orbiti Referentna epoha orbite AODE te Keplerovi elementi orbite a , e, M 0 , 0 , i0 , l0 dn di dΩ Cuc , Cus Brzina promene srednjeg kretanja satelita Brzina promene inklinacije orbite %U]LQDSURPHQHUHNWDVFHQ]LMHX]OD]QRJþYRUD Korekcioni koeficijenti argumenta perigeuma .RUHNFLRQLNRHILFLMHQWLJHRFHQWULþQRJUDVWRMDQMD C rc , C rs Cic , Cis Korekcioni koeficijenti inklinacije orbite Signali na obe frekvencije, S L1 i S L 2 PRJX VH SUHPD WRPH X SRWSXQRVWL PDWHPDWLþNL SUHGVWDYLWL X obliku: S L1 (t ) = AY , L1[Y (t ) ⊕ D(t )] cos( 1t + L1 ) + AC [C (t ) ⊕ D (t )]sin( 1t + S L 2 (t ) = AY , L 2 [Y (t ) ⊕ D(t )] cos( 2 t+ L2 ), '%ODJRMHYLü: M GLOBALNOG POZICIONOG SISTEMA ... (DOKTORSKA DISERTACIJA) L1 ), (1.2.1) (1.2.2) 15 1.2 Principi GPS merenja i pozicioniranja SUL þHPX AY ,L1 , AY ,L 2 i AC R]QDþDYDMX DPSOLWXGH RGJRYDUDMXüLK NRGRYD Y (t ) i C (t ) su Y i C/A kodni nizovi, D(t ) je navigaciona poruka, 1 i 2 VXNUXåQHIUHNYHQFLMHD L1 i L 2 SRþHWQHID]H QRVHüLK WDODVD 8 RNYLUX 6$ ]DãWLWQH PHUH VWDELOQRVW IUHNYHQFLMD QRVHüLK WDODVD L WDþQRVW SRGDWDND QDYLJDFLRQHSRUXNHGHJUDGLUDMXVHWDNR]YDQLPSVHXGRVOXþDMQLP i procesima. U situacijama kada nisu u potpunosti funkcionalni, GPS sateliti mogu emitovati i takozvane nestandardne C/A i Y kodove (NSC i NSY). Osnovni razlog postojanja ove vrste kodova je zaštita korisnika, jer ih navigacioni prijemnici niti mogu generisati, niti vršiti njihov prijem. 1.2.2 Obrada GPS signala NAVSTAR GPS je jednosmerni satelitski pozicioni sistem, što zQDþLGDVHHNVWUDNFLMDLQIRUPDFLMDL] HPLWRYDQH HOHNWURPDJQHWQH HQHUJLMH YUãL X NRULVQLþNLP *36 SULMHPQLFLPD 1DMYDåQLMH NRPSRQHQWH *36SULMHPQLNDXNRMLPDVHQDQLåHPLOLYLãHPQLYRXYUãLREUDGDSULPOMHQLK*36VLJQDODVXDQWHQD radiofrekventna sekcija, analogno-GLJLWDOQLSUHWYDUDþHOHNWURQVNLNDQDOLLPLNURSURFHVRU 8DQWHQLVHYUãLSULMHPHPLWRYDQHHOHNWURPDJQHWQHHQHUJLMHQMHQRSRMDþDYDQMHILOWUDFLMDLSUHWYDUDQMH X HOHNWULþQX VWUXMX NDNR EL VH PRJOD GDOMH REUD LYDWL HOHNWURQVNLP XUH DMLPD 6WHSHQ LVNRULãüHQRVWL DQWHQHSURMHNWXMHVHWDNRGDPLQLPDOL]XMHXWLFDMUHIOHNWRYDQLKVLJQDODþLMDSRODUL]DFLMDLPDRULMHQWDFLMX VXSURWQXRG*36VLJQDOD6WDELOQRVWID]QRJFHQWUDNDRGUXJRYDåQRVYRMVWYRDQWHQHSRVWLåHVHQMHQRP PLQLMDWXUL]DFLMRPDOLVDPRGRRGUH Hne mere, jer se sa smanjenjem gabarita antene smanjuje i stepen QMHQHLVNRULãüHQRVWL 1DNRQSUHOLPLQDUQHREUDGHXDQWHQL*36VLJQDOLSULVWLåXXUDGLRIUHNYHQWQXVHNFLMXSULMHPQLNDXNRMRM VHSUYRUD]GYDMDMXLSRQRYRILOWULUDMXLSRMDþDYDMX=DWLPVHYUãLWransformacija originalne frekvencije XPQRJRQLåXPH XIUHNYHQFLMXNRMDMHSRJRGQLMD]DGDOMXREUDGX6DPSRVWXSDNVDVWRMLVHXPHãDQMX SULPOMHQHLUHIHUHQWQHIUHNYHQFLMHãWRMHPDWHPDWLþNLHNYLYDOHQWQRPQRåHQMXWDODVD cos( 1t ) cos( 2 1 t ) = cos[( 2 1 + 2 1 )t ] + cos[( 2 1 − 2 )t ] . (1.2.3) Re]XOWXMXüD PH XIUHNYHQFLMD 1 − 2 SUHGVWDYOMD YHOLþLQX 'RSOHUVNRJ SRPDND QDVWDORJ XVOHG UHODWLYQRJNUHWDQMDVDWHOLWDLSULMHPQLNDLVDGUåLMRãXYHNVYHPRGXODFLMHNDRLRULJLQDOQLQRVHüLWDODVL Po prolasku kroz radiofrekventnu sekciju signali se prvo digitalizuju u analogno-digitalnom SUHWYDUDþXDSRWRPSRMHGLQDþQRL]ROXMXX]SRPRü'RSOHUVNLKSRPDNDL&$RGQRVQR3<NRGRYD8 WXVYUKXMHVYDNRPVLJQDOXLVYDNRMIUHNYHQFLMLSRVYHüHQSRMHGDQHOHNWURQVNLNDQDO Definitivnu obradu signala L IRUPLUDQMH PHUQLK YHOLþLQD YUãL PLNURSURFHVRU 8 QMHJRYH QDMYDåQLMH IXQNFLMH VSDGDMX NRRUGLQDFLMD L VLQKURQL]DFLMD VYLK SURFHVD DNYL]LFLMD L SUDüHQMH VLJQDOD GLJLWDOQD ILOWUDFLMD PHUHQMD GHNRGLUDQMH QDYLJDFLRQH SRUXNH L UDþXQDQMH QDYLJDFLRQRJ UHãHQMD u realnom YUHPHQX0LNURSURFHVRURVLPWRJDXSUDYOMDLUDGRPHOHNWURQVNLKXUH DMD'//L3//MLWWHULXNRMLPD se vrše kodna i fazna merenja. 3ULQFLS NRGQLK PHUHQMD NRG JHRGHWVNLK *36 SULMHPQLND VDVWRML VH XXSRUH HQMXSULPOMHQLKLLQWHUQR generisanih referHQWQLK VLJQDOD '// GåLWHU WRP SULOLNRP YUHPHQVNL WUDQVODWRUQR SRPHUD UHIHUHQWQL VLJQDOGRNQHSRVWLJQHPDNVLPDOQXDSVROXWQXYUHGQRVWNRHILFLMHQWDNRUHODFLMHþLPHVH GRELMDYUHPH puta satelitskog signala ∆t , odnosno razlika trenutaka vremena prijema t m i emitovanja t j (slika 1.73RãWRþDVRYQLFLSULMHPQLNDLVDWHOLWDUHDOL]XMX*36YUHPHQVNXVNDOXVDRGUH HQLPRGVWXSDQMLPD UDVWRMDQMHNRMHVHGRELMDPQRåHQMHPYUHPHQDSXWDVDEU]LQRPHOHNWURPDJQetnih talasa c0 naziva se SVHXGRGXåLQRP P = c0 (t m − t j ) . 16 (1.2.4) '%ODJRMHYLüM GLOBALNOG POZICIONOG SISTEMA ... (DOKTORSKA DISERTACIJA) 1 NAVSTAR GLOBALNI POZICIONI SISTEM SLIKA 1.7.3ULQFLSPHUHQMDNRGQLKSVHXGRGXåLQD Nakon sinhronizacije kodova i dekodiranja navigacione poruke, primljeni i referentni signal se mešaju, taNRGDSUHRVWDMXþLVWLQHPRGXOLVDQLQRVHüLWDODVLþLMDVHID]DPHULX3//GåLWHUX8SRþHWQRMHSRKL t 0 , fazno merenje (t 0 ) sastoji se od razlike faza referentnog signala m (t 0 ) i emitovanog signala j (t 0 − ∆t ) , kao i proizvoljnog stanja registra N (t 0 ) (slika 1.8): (t 0 ) = m (t 0 ) − j (t 0 − ∆t ) + N (t 0 ) . (1.2.5) SLIKA 1.8.3ULQFLSPHUHQMDID]QLKSVHXGRGXåLQD ,DNR SRþHWQR VWDQMH UHJLVWUD QHPD QLNDNYR IL]LþNR ]QDþHQMH X QMHPX üH VH nakon prvog izvršenog faznog merenja kontinuirano registrovati akumulirani celi broj faznih ciklusa. Fazno merenje u proizvoljnoj epohi t LPDüHSUHPDWRPHREOLN (t ) = m (t ) − j (t − ∆t ) + N (t 0 ) + N (t − t 0 ) . (1.2.6) Do aktiviranja AS zaštitne mere postupFL SUDüHQMD VLJQDOD X '// L 3// GåLWHULPD QLVX VH ELWQR PH XVREQR UD]OLNRYDOL 8YR HQMH WDMQRJ : NRGD RQHPRJXüLOR MH PH XWLP GHPRGXODFLMX QRVHüHJ talasa L2 i direktan pristup P kodu. Jedna od prvih metoda kojom je ovaj problem rešavan sastojala se u kvadriranju L2 signala: S L22 (t ) = AY2, L 2 [Y (t ) ⊕ D(t )]2 cos 2 ( 2 t+ L2 ) = AY2, L 2 1 + cos[2( '%ODJRMHYLü: M !"#$%& GLOBALNOG POZICIONOG SISTEMA ... (DOKTORSKA DISERTACIJA) 2 2 t+ L2 )] , (1.2.7) 17 1.2 Principi GPS merenja i pozicioniranja þLPH VH XSRWSXQRVWLXNODQMDODPRGXODFLMDQRVHüHJWDODVDDOLMHSRVWXSDNLPDR]DSRVOHGLFXJXELWDN QDYLJDFLRQLK SRGDWDND L UH]XOWXMXüL VLJQDO VD GYRVWUXNR YHüRP IUHNYHQFLMRP L PHUQLP ãXPRP Savremeni geodetski GPS prijemnici koriste niz znatno efikasnijih rešenja kao što su korelacija NRGRYD X NRPELQDFLML VD NYDGULUDQMHP // PH XNRUHODFLMD 3-W-SUDüHQMH LOL =-SUDüHQMH þLMH VX JODYQHNDUDNWHULVWLNHSXQDWDODVQDGXåLQDUH]XOWXMXüHJVLJQDODLPLQLPDOQD degradacija odnosa signala i šuma. 1.2.3 Princip GPS pozicioniranja 3R]LFLRQLUDQMH SRPRüX YHãWDþNLK =HPOMLQLK VDWHOLWD ]DVQLYD VH QD MHGQRVWDYQRP JHRPHWULMVNRP SULQFLSX RGUH LYDQMD QHSR]QDWRJ YHNWRUD SRORåDMD WDþNH rP ), na osnovu po]QDWRJ YHNWRUD SRORåDMD satelita ( rS LPHUHQRJYHNWRUDUHODWLYQRJSRORåDMDVDWHOLWDXRGQRVXQDWDþNX rPS ) (slika 1.9): rP (t ) = rS (t ) − rPS (t ) = rS (t ) − e PS (t ) rPS (t ) . (1.2.8) SLIKA 1.9. Osnovni princip satelitskog pozicioniranja. Merenje vektora rPS SRGUD]XPHYD RGUH LYDQMH VYLK QMHJRYLK NRPSRQHQWL SUDYFD VPHUD L LQWHQ]LWHWD7RVHWHKQRORãNLSRVWLåHQDWDMQDþLQãWRVHVDWHOLWIRWRJUDILãHXWUHQXWNXPHUHQMDGXåLQH þLPH VH VLPXOWDQR RGUH XMX MHGLQLþQL YHNWRr e PS i intenzitet rPS 0H XWLP VDYUHPHQR VDWHOLWVNR pozicioniranje zasniva se na alternativnom postupku koji se sastoji u simultanom merenju QHNRSODQDUQLKGXåLQDGRWULLOLYLãHVDWHOLWD3RORåDMWDþNH P RGUH HQMHXWRPVOXþDMXSUHVHNRPVIHUD þLML VX FHQWUL X VDWHOLWVNLP ORNDFLMDPD D SROXSUHþQLFL MHGQDNL L]PHUHQLP GXåLQDPD Ri . Kada je u SLWDQMX1$967$5*36SR]LFLRQLUDQMHQHRSKRGQHVXXWRPVPLVOXQDMPDQMHþHWLULGXåLQHzbog toga ãWR MH SRUHG WURGLPHQ]LRQDOQRJ SRORåDMD WDþNH QHSR]QDWD LYHOLþLQDRGVWXSDQMDþDVRYQLNDSULMHPQLND od sistemskog GPS vremena. 18 '%ODJRMHYLüM'()*+',-. GLOBALNOG POZICIONOG SISTEMA ... (DOKTORSKA DISERTACIJA) 1 NAVSTAR GLOBALNI POZICIONI SISTEM 2YDNDY QDþLQ SR]LFLRQLUDQMD QD]LYD VH DSVROXWQLP MHU VH RGUH LYDQMH SRORåDMD WDþDND YUãL X NRRUGLQDWQRP VLVWHPX þLML VH SRþHWDN QDOD]L X FHQWUX PDVH =HPOMH D LVWRYUHPHQR VH SRGXGDUD VD åLåDPD HOLSWLþQLK VDWHOLWVNLK SXWDQMD 3RãWRNRRUGLQDWQLVLVWHPUHDOL]XMXVDWHOLWVNHHIHPHULGHNYDOLWHW DSVROXWQRJSR]LFLRQLUDQMDRGUH HQMHSUHVYHJDJHRPHWULMVNLPUDVSRUHGRPVDWHOLWDWDþQRãüXQMLKRYLK SRORåDMD L WDþQRãüX PHUHQMD ,QDþH SR]QDYDQMH VDWHOLWVNLK SRORåDMD QH SUHGVWDYOMD SULQFLSLMHOQR RJUDQLþHQMHSR]LFLRQLUDQMDYHãWDþNLP=HPOMLQLPVDWHOLWLPDDOLVLQJXODUQRVWLVWRYUHPHQRJRGUH LYDQMD SRORåDMDWDþDNDLVDWHOLWVNLKRUELWD]DKWHYDXWRPVOXþDMXQHNXIRUPXLWHUDWLYQRJSRVWXSND 8WLFDMYHOLNRJEURMDVLVWHPDWVNLKL]YRUDJUHãDND]QDWQRVHVPDQMXMHSDþDNLXSRWSXQRVWLHOLPLQLãH NDGDVHSR]LFLRQLUDQMHMHGQHWDþNHYUãLXRGQRVXQDQHNXGUXJXWDþNX rPQ (t ) = rPS (t ) − rQS (t ) = e PS (t ) rPS (t ) − e QS (t ) rQS (t ) . (1.2.9) 2YDNDY QDþLQ SR]LFLRQLUDQMD QD]LYD VH UHODWLYQLP MHU VH RGUH LYDQMH SRORåDMD WDþNH Q vrši u WRSRFHQWULþQRP NRRUGLQDWQRP VLVWHPX þLML MH SRþHWDN NRQFHSWXDOQR VPHãWHQ X WDþNL P , ali sa RþXYDQRP JOREDOQRP RULMHQWDFLjom koordinatnih osa. Postupak relativnog pozicioniranja izvodi se VLPXOWDQLP PHUHQMHP GXåLQD VD REH WDþNH GR WUL LOL YLãH VDWHOLWD SUL þHPX MH GRYROMQR SR]QDYDQMH SULEOLåQLKSRORåDMDVDWHOLWDLNRRUGLQDWQRJSRþHWNDDGDWDþQRVWUHODWLYQRJSRORåDMDRVWDQe na visokom nivou. U poslednjih petnaest godina razvijen je veliki broj postupaka apsolutnog i relativnog GPS pozicioniranja. Iako je svaka klasifikacija tih metoda neizostavno subjektivna, mogu se definisati VOHGHüDWULRSãWDNULWHULMXPDSRGHOH • • • Na osnovX GXåLQH YUHPHQD ]DSRVHGDQMD WDþDND SULMHPQLFLPD *36 SR]LFLRQLUDQMH PRåH ELWL SHUPDQHQWQR VWDWLþNR EU]R VWDWLþNR SVHXGRNLQHPDWLþNR L NLQHPDWLþNR VD UHGRVOHGRP NRML RGJRYDUD RSDGDMXüHP YUHPHQX ]DGUåDYDQMD QD WDþNDPD 0HWRGD SHUPDQHQWQRJ *36 pozicioniranja podrazumeva stalno stacionirane prijemnike kojima se neprekidno vrše PHUHQMD GRN VH NLQHPDWLþNRP PHWRGRP SR]LFLRQLUDQMH L]YRGL GRN MH SULMHPQLN SUDNWLþQR X pokretu. 1D RVQRYX QDþLQD REUDGH RGQRVQR YUHPHQD SURWHNORJ RG L]YUãHQLK PHUHQMD *36 pozicionirDQMH PRåH ELWL VD REUDGRP DSRVWHULRUL LOL X UHDOQRP YUHPHQX 2EUDGD DSRVWHULRUL YUãLVHQDNRQVYLKL]YUãHQLKPHUHQMDLLPDWXSUHGQRVWãWRSUXåDPRJXüQRVWGHWDOMQHDQDOL]HL kontrole kvaliteta kako mernog materijala, tako i rezultata pozicioniranja. Da bi se obrada L]YHOD X UHDOQRP YUHPHQX QHRSKRGQR MH GD SULMHPQLFL LPDMX LPSOHPHQWLUDQ RGJRYDUDMXüL VRIWYHULGDSRVWRMLUDGLRYH]DNRMDRPRJXüXMHQMLKRYXPH XVREQXNRPXQLNDFLMX 1D RVQRYX YUVWH PHUQLK YHOLþLQD *36 SR]LFLRQLUDQMH PRåH ELWL ID]QR LOL NRGQR .odna PHUHQMD VX MHGQR]QDþQD DOL VX UH]XOWDWL SR]LFLRQLUDQMD QLåH WDþQRVWL 6 GUXJH VWUDQH REUDGD PQRJRSUHFL]QLMLKID]QLKPHUHQMDSRYH]DQDMHVDSUREOHPRPWDNR]YDQLKID]QLKQHRGUH HQRVWL 1MLKRYRUHãDYDQMHNRGSVHXGRNLQHPDWLþNLKLNLQHPDWLþNLKPHWRGDQD]iva se inicijalizacijom, a PRåH GD VH L]YHGH VWDWLþNLP PHUHQMLPD ]DSRVHGDQMHP WDþDND VD SR]QDWLP NRRUGLQDWDPD ]DPHQRPPHVWDDQWHQDLOLSRVHEQLPDOJRULWPLPDXVOXþDMXGDMHSULMHPQLNXSRNUHWX27) 1DYHGHQHPHWRGHQLVXPH XVREQRXSRWSXQRVWLQH]DYLVQHa pojedine kombinacije imaju u literaturi i SRVHEQDLPHQD7DNRMHUHODWLYQRSVHXGRNLQHPDWLþNRSR]LFLRQLUDQMHX]SRPRüID]QLKPHUHQMDSR]QDWR NDR 6WRS*R NDGD VH REUDGD YUãL DSRVWHULRUL D NDR 57. X VOXþDMX REUDGH X UHDOQRP YUHPHQX Upotreba kodnih merenjaXVOLþQHVYUKHQD]LYDVH'*36PHWRGRP6GUXJHVWUDQHQHNHNRPELQDFLMH SRWSXQR VX LVNOMXþHQH MHU QD SULPHU QDYLJDFLMD X DSVROXWQRP UHåLPX UDGD QLMH PRJXüD ID]QLP YHü VDPR NRGQLP PHUHQMLPD .ODVLILNDFLMD SRVWXSDND *36 SR]LFLRQLUDQMD SR NULWHULMXPX QDþLQa obrade data je u tabeli 1.4 i tabeli 1.5]DMHGQRVDRVQRYQLPSULQFLSLPDLQDMYDåQLMLPNDUDNWHULVWLNDPD '%ODJRMHYLü: M '()*+',-. GLOBALNOG POZICIONOG SISTEMA ... (DOKTORSKA DISERTACIJA) 19 1.2 Principi GPS merenja i pozicioniranja TABELA 1.4. Postupci GPS pozicioniranja sa obradom aposteriori. Postupak Princip i osnovne karakteristike Permanentni Relativno pozicioniranje simultanim faznim merenjima, permanentno stacionirani SULMHPQLFL YUHPH RSDåDQMD QHRJUDQLþHQR WDþQRVW QHNROLNR mm, dvofrekventni SULMHPQLFLSURL]YROMQDPH XVWDQLþQDUDVWRMDQMD 6WDWLþNL %U]LVWDWLþNL .YD]LNLQHPDWLþNL .LQHPDWLþNL Relativno pozicioniranje simultanim faznim merenjima, premeštanje prijemnika, YUHPH RSDåDQMD RG h GR QHNROLNR GDQD WDþQRVW GR cm, jednofrekventni ili dvofrekventni prijemnici, rastojanja do 100km. Relativno pozicioniranje simultanim faznim merenjima, premeštanje prijemnika i eventualno ponovno zaposedanje WDþDND YUHPH RSDåDQMD RGQHNROLNRPLQXWDGR 1h WDþQRVW -2cm, jednofrekventni ili dvofrekventni prijemnici, rastojanja do nekoliko desetina km. Relativno pozicioniranje simultanim faznim merenjima, inicijalizacija i VHNYHQFLMDOQR RGUH LYDQMH WDþDND YUHPH LQLFLMDOL]DFLMH QHNROLNR PLQXWD LOL 27) YUHPH RSDåDQMD RG QHNROLNR HSRKD WDþQRVW -3cm SRåHOMQL GYRIUHNYHQWQL prijemnici, rastojanja manja od 10km. Relativno pozicioniranje simultanim faznim merenjima, inicijalizacija i RGUH LYDQMH WUDMHNWRULMH YUHPH LQLFLMDOL]DFLMH QHNROLNR PLQXWD LOL 27) WDþQRVW nekoliko cm SRåHOMQL GYRIUHNYHQWQL SULMHPQLFL UDVWRMDQMD GR QHNROLNR GHVHWLQD km. TABELA 1.5. Postupci GPS pozicioniranja sa obradom u realnom vremenu. Postupak .LQHPDWLþNL RTK DGPS Navigacioni Princip i osnovne karakteristike Relativno pozicioniranje simultanim faznim merenjima, inicijalizacija i RGUH LYDQMH WUDMHNWRULMH LOL QDYLJDFLMD YUHPH LQLFLMDOL]DFLMH QHNROLNR PLQXWD LOL 27) WDþQRVW QHNROLNR cm SRåHOMQL GYRIUHNYHQWQL SULMHPQLFL Uastojanja do nekoliko desetina km. Relativno pozicioniranje simultanim faznim merenjima, inicijalizacija i VHNYHQFLMDOQR RGUH LYDQMH WDþDND YUHPH LQLFLMDOL]DFLMH QHNROLNR PLQXWD LOL 27) YUHPH RSDåDQMD RG QHNROLNRHSRKD WDþQRVW-3cm, rastojanja manja od 10km, ili nekoliko desetina kmXPUHåLSHUPDQHQWQLKVWDQLFD 5HODWLYQR SR]LFLRQLUDQMH VLPXOWDQLP NRGQLP PHUHQMLPD RGUH LYDQMH WDþDND LOL QDYLJDFLMD YUHPH RSDåDQMD RG MHGQH GR QHNROLNR HSRKD WDþQRVW -5m, proizvoljna rastojanja. $SVROXWQR SR]LFLRQLUDQMH NRGQLP PHUHQMLPD MHGQRJ SULMHPQLND RGUH LYDQMH WDþDNDLOLQDYLJDFLMDYUHPHRSDåDQMDRGMHGQHGRQHNROLNRHSRKDWDþQRVW-100m u zavisnosti od SA i vrste kodova. 7DþQRVW SR]LFLRQLUDQMD MH VD VWDQRYLãWD NRULVQLND MHGDQ RG QDMYDåQLMLK NULWHULMXPD L]ERUD NRQNUHWQRJ SRVWXSND8WRPVPLVOXPHWRGH*36SR]LFLRQLUDQMDSRND]XMXUD]OLþLWXRVHWOMLYRVWQDSURPHQXIDNWRUD kao što su na primer atmosferski uslovi, broj satelita, njihova geometrijska konstelacija, ili interval vremena sa kojLPVHYUãLUHJLVWUDFLMDPHUHQMD8RSãWHPVOXþDMXUHODWLYQRSR]LFLRQLUDQMHGXåHYUHPH 20 '%ODJRMHYLüM'()*+',-. GLOBALNOG POZICIONOG SISTEMA ... (DOKTORSKA DISERTACIJA) 1 NAVSTAR GLOBALNI POZICIONI SISTEM ]DSRVHGDQMDXSRWUHEDID]QLKPHUHQMDLREUDGDDSRVWHULRULLPDMX]DUH]XOWDWYLãXWDþQRVWXRGQRVXQD apsolutno pozicioniranje, pokretne prijemnike, upotrebu kodnih merenja i obradu u realnom vremenu (slika 1.10). SLIKA 1.10. 5DVSRQL WDþQRVWL UD]OLþLWLK PHWRGD *36 SR]LFLRQLUDQMD )$= SSP – UHODWLYQR VWDWLþNR pozicioniranje faznim merenjima; FAZ DGPS (RTK) – UHODWLYQR NLQHPDWLþNR SR]LFLRQLUDQMH ID]QLP merenjima u realnom vemenu; KOD (FAZ float) –UHODWLYQRVWDWLþNRSR]LFLRQLUDQMHNRGQLPPHUHQMLPDLOL ID]QLP PHUHQMLPD VD UHDOQLP YUHGQRVWLPD ]D ID]QH QHRGUH HQRVWL .2')$= '*36 – relativno NLQHPDWLþNR SR]LFLRQLUDQMH NRPELQRYDQLP PUHQMLPD X UHDOQRP YUHPHQX .2' '*36 – relativno NLQHPDWLþNR SR]LFLRQLUDQMH NRGQLP PHUHQMLPD X UHDOQRP YUHPHQX 3 – apsolutno pozicioniranje P kodnim merenjima; C/A – apsolutno pozicioniranje C/A kodnim merenjima; C/A (SA) – apsolutno pozicioniranje C/A kodnim merenjima sa aktivnom SA merom zaštite. '%ODJRMHYLü: M '()*+',-. GLOBALNOG POZICIONOG SISTEMA ... (DOKTORSKA DISERTACIJA) 21 1.2 Principi GPS merenja i pozicioniranja 22 '%ODJRMHYLüM'()*+',-. GLOBALNOG POZICIONOG SISTEMA ... (DOKTORSKA DISERTACIJA) II. GEODETSKI OBRNUTI DINAMIČKI ZADATAK 4. GEODETSKA MJERENJA VERTIKALNIH POMJERANJA ZEMLJINE KORE 4.4. GNSS mjerenje NAVSTAR GPS kosmički radio-navigacioni sistem, u toku 1973. god. razvilo je, uspostavilo, testiralo i počelo primjenjivati U.S. Ministarstvo odbrane (US DoD), da zadovolji potrebe vojske - za tačnim određivanjem položaja, brzine i održavanja vremena, u opštem referentnom sistemu, na neprekidnoj osnovi bilo gdje u sferi uticaja sistema Zemlje (US DoD, 2009). U maju 2000. god. ukinuta je SA mjera zaštite NAVSTAR GPS za „nevojne” korisnike, pa je u martu 2005. god., sa ruskim sistemom GLONASS i evropskim navigacionim sistemom Galileo (u razvijanju) osnovana Međunarodna služba svjetskog navigacionog satelitskog sistema (IGS) u okviru Međunarodne geodetske asocijacije (IAG/AIG). GNSS čine (v. Tabela 4.1; v. Dach, et. al., 2007; US DoD, NAVSTAR GPS, 2008): (1) kosmički, (2) kontrolni (operativni kontrolni centari sa glavnim i osnovnim kontrolnim stanicama, Zemaljskim antenama i mrežom pratećim stanicama; v. U.S. DoD, 2008; NASA, CDDIS, 2008; GLONASS, 2008; CODE, 2008), (3) korisnički (prijemnici, antene itd.) i (4) terestrički dio (IGS sa ostalim podsistemima, infrastrukturom itd.). Tabela 4.1. GNSS - GLONASS i NAVSTAR GPS Objašnjenje, veličina Srednja visina satelita GLONASS NAVSTAR GPS 19 130 km 20 200 km Broj satelita 24 24 Operativni broj satelita (novembar 2008.) 19 31 Broj orbitalnih ravni Broj satelita u orbitalnoj ravni Poluprečnici orbita Inklinacija orbitalne ravni Period revolucije satelita Nominalni ekscentricitet orbite Ponovljivost praćenja sa Zemlje Ponovljivost broja i rasporeda satelita Reflektori SLR (Satellite Laser Ranging) Tehnika izdvajanja signala Osnovna frekvencija (f0) 0 3 (pravilno raspoređene; 3 x 120 ) 8 (na jednakom rastojasnju) 25 510 km 64,80 0 ≈ 11 h 16 min ≈0 poslije osam zvjezdanih (sideričkih) dana ≈ 23 h 56 min svi sateliti FDMA (Frequency Division Multiple Access) 5,110 MHz 6 (pravilno raspoređene; 6 x 600) 4 (na nejednakom rastojanju) 26 560 km 55,000 ≈ 11 h 58 min ≈0 poslije jednog zvjezdanog dana ≈ 23 h 56 min dva satelita CDMA (Code Division Multiple Access) 10,23 MHz Noseći talas L1 (n = 1, ..., 12) 1602,5625 MHz - 1608,75 MHz 1575,42 MHz Noseći talas L2 (n = 1, ..., 12) 1246,4375 MHz - 1251,25 MHz 1227,60 MHz C/A kod (L1) 0,511 MHz 1,023 MHz P kod (L1, L2) 5,110 MHz 10,23 MHz Referentni sistem Referentno vrijeme PZ-90 UTC (SU) WGS84 UTC (USNO) GNSS prijemnici otkrivaju, primaju, pretvaraju i obrađuju signale GNSS satelita (GPS, GLONASS i u budućnosti, Galileo, Compass i sl.). Sateliti „šalju“ signale, na radiofrekventnim nosećim talasima, prema GNSS mjernim stanicama (prijemnici i prijemne antene) za određivanje položaja tačaka, sa različitom tačnošću, zavisno od predajne antene, tačnosti orbita, metrološkog obezbjeđenja prijemnika i antena i prethodne obrade i dorade podataka primljenih signala. Međunarodna GNSS služba (IGS) obezbjeđuje geodetske podatke i proizvode (v. Prilog 4.3.) kao standarde GNSS mjerenja u podršci geonaučnim istraživanjima, višenaučnoj i višedisciplinarnoj primjeni, obrazovanju i obučavanju stručnjaka. Osavremenjuje naučno razumjevanje međuzavisnih elemenata sistema Zemlje i podržava primjenu GNSS mjerenja u ostalim društvenim djelatnostima (v. IGS Terms of reference; IGS, 2005). Višnjić, I. R. (2011): GEODETSKO ODREĐIVANJE SAVREMENIH VERTIKALNIH POMJERANJA ZEMLJINE KORE... (DOKTORSKA DISERTACIJA) 53 4. GEODETSKA MJERENJA VERTIKALNIH POMJERANJA ZEMLJINE KORE II. GEODETSKI OBRNUTI DINAMIČKI ZADATAK Ostvarenje uloge GNSS u geodetskom određivanju vertikalnih pomjeranja Zemljine kore zahtijeva ispravno vrednovanje i sagledavanje posebnosti GNSS premjera sa praktično-teorijskog gledišta, prvenstveno imajući u vidu sledeće činjenice (v. Slika 4.8; Blagojević, 2003): satelitska opažanja funkcionalno povezuju terestričke mjerne stanice, posredno, preko pokretnih satelita, pa je neophodan pravilan pristup uspostavljanju njihovog međusobnog odnosa, uključujući i vremenski promjenljiv raspored satelita i odnos prema mjernim stanicama; GNSS prijemnici i prijemne antene složeni su elektronski sistemi koji zahtijevaju odgovarajuće metrološko obezbjeđenje - definisanim standardizovanim postupcima; veliki skupovi podataka GNSS mjerenja (vremenske serije kodnih i faznih pseudoopažanja) i uticaji raznovrsnih izvora grešaka, zahtijevaju izbor odgovarajućih mjernih veličina, funkcionalnog i stohastičkog modela mjerenja i sistem obezbjeđenja kvaliteta; rezultati GNSS (geometrijskih) mjerenja potrebno je funkcionalno povezati sa odgovarajućim veličinama i parametrima polja Zemljine teže; GNSS mjerenja mogu se izvoditi neprekidno, omogućavajući - održavanje stabilnog terestričkog referentnog sistema, praćenje stanja atmosfere, jonosfere i deformacija tijela Zemlje i određivanje pomjeranja i deformacija Zemljine kore. Usvajaju se i razvijaju, u okviru IGS i IAG, neophodni sporazumi, dogovori, standardi i tehnički uslovi o prikupljanju, obradi, modelovanju, tumačenju i korišćenju podataka GNSS premjera. IGS i GNSS predstavljaju značajniji dio Svjetskog geodetskog sistema opažanja (GGOS) dinamike Zemlje. Zadatak IGS je da prikuplja, obrađuje, čuva i korisnicima raspodjeljuje GNSS skupove podataka potrebne tačnosti, kao što su (IGS, 2009): • satelitske efemeride i pridruženi dopunski podaci i uslovi (engl. constrains); • paramatri obrtanja Zemlje (ERP); • koordinate i brzine GNSS stanica na Zemlji (lat. in situ; v. Plagg, et. al., 2007); • podaci o GNSS satelitskim i korisničkim časovnicima i jedinicama mjere za vrijeme; • podaci o jonosferi, troposferi itd. Sadržaj i kvalitet podataka i proizvoda GNSS doprinosi: ▪ uspostavljanju i održavanju terestričkih referentnih sistema ▪ ▪ ▪ ▪ ▪ ▪ ▪ Slika 4.8. Osnove satelitskog određivanja položaja tačke P(rP; rS; rPS) i okvira (TRS/TRF); (S - sateliti, rP, rS - geocentrički radijus vektori, rPS - topocentrički radijus vektor) praćenju deformacija tijela, kore i površi Zemlje; praćenju stanja i poremećaja obrtanja Zemlje; praćenju stanja i poremećaja hidrosfere (nivo voda mora i kopna, stanje lednika, itd.); praćenju stanja jonosfere i troposfere; klimatološkom istraživanju, sa modelovanjem i prognoziranjem meteoroloških uslova; prenošenju signala standarda jedinica mjere za vrijeme i frekvenciju; određivanju elemenata i parametara satelitskih orbita ostalih satelitskih sistema (SAR, InSAR, GOCE, GRACE, ChaMP itd.) i sl. GNSS orbite (emitovane, CODE, itd.) preduslov su odgovarajuće primjene GNSS premjera i moraju se određivati u okviru cjelokupne djelatnosti i odgovarajućih centara IGS. Na osnovu istraživanja, položajna greška ∆x [ m ] krajnjih tačaka osnovice L [ km ] , funkcija je grešaka orbite ∆X [m ] , L [ km] L ∆x [ m] ≈ ⋅ ∆X [ m] ≈ ⋅ ∆X [ m] , d 250000 [ km] (4.4-1) u zavisnosti od približnog rastojanja (d ≈ 25000 km) između satelita i prostora GNSS premjera. Neprekidni rad terestričkih GNSS prijemnika u trajanju (1-2) časa, obezbjeđuje zadovoljavajuće rezultate, a pri korišćenju stalnih (permanentnih) mjernih stanica, sa odgovarajućom statističkom obradom podataka, rezultati GNSS mjerenja dovoljne su pouzdanosti. Matematički opis satelitske orbite veoma je složen zbog: (1) neravnomjernosti i poremećaja polja teže, (2) djelovanja ostalih nebeskih tijela, (3) kretanja atmosfere, (4) promjena atmosferskog pritiska i sl. 54 Višnjić, I. R. (2011): GEODETSKO ODREĐIVANJE SAVREMENIH VERTIKALNIH POMJERANJA ZEMLJINE KORE... (DOKTORSKA DISERTACIJA) II. GEODETSKI OBRNUTI DINAMIČKI ZADATAK 4. GEODETSKA MJERENJA VERTIKALNIH POMJERANJA ZEMLJINE KORE Satelitska geocentrična orbita r = r(t;a,e,i, Ω, ω, u) u inercijalnom prostoru (v. Slika 4.9.) opisuje se diferencijalnom jednačinom drugog reda (problem kretanja dva tijela), uzimajući u obzir zanemarivost mase satelita prema masi Zemlje: r(t) = −G ⋅ M ⋅ r(t) , r3 (4.4-2) gdje su; G·M[m3⋅s-2], r[m], r (t) , geocentrična gravitaciona konstanta; dužina geocentričnog poluprečnika ravni orbite; geocentrični radijus vektor satelita. Rješenje jednačine (4.4-2) može biti elipsa, parabola i hiperbola, pa se pomoću dopunskih veličina i parametara treba definisati šest parametara orbite, što uzrokuje značajan problem pri rješavanju zadatka. Za stvarne uslove, jednačina kretanja satelita složenijeg je oblika (v. Dach, et. al., 2007), r(t) = −GM ⋅ r(t) + a(t, 0 ,p1 ,p 2 ,...) = f (t,r,r, p0 , p1 , p2 ,...), r, r,p 3 r (4.4-3) gdje su, a(t,r,...) p0, p1, p2,... poremećajno ubrzanje; poremećajni parametri orbite. Pridruživanjem početnih uslova elemenata orbite, Z ∂ r(t) r0 = r(t 0 ;a,e,i, Ω, ω,u 0 ); rp (t) = , ∂p ∂v(t) v0 = v(t 0 ;a,e,i, Ω, ω, u 0 ); v p (t) = , ∂p p ∈ (t 0 ;a,e,i, Ω, ω, u 0 ,...), h Y rješava se početna diferencijalna jednačina, r0,p v0,p X Slika 4.9. Elementi satelitske orbite (a, e, i, Ω,...) i geocentrični pravougli koordinatni sistem X, Y, Z Matrica A3x3 je sa koeficijentima Ap,ik (4.4-4) r (t ) = A ⋅ r + f p 0 p p = rp (t 0 ;a,e,i, Ω, ω, u 0 ), = v p (t 0 ;a,e,i, Ω, ω, u 0 ), (4.4-5) p ∈ (t 0 ;a,e,i, Ω, ω, u 0 ,...), pod pretpostavkom da GNSS sateliti nemaju brzinu zavisnu od poremećajnih sila. = ∂fi/∂rk; fp , je izvod vektora f po parametru p (p ∈ (a,e,i, Ω, ω, u 0 , p 0 , p1 ,...) ), koji je jednak nuli za oskulatorne elemente orbite. Početni uslovi su jednaki nuli, za dinamičke parametre orbite. Numeričkom integracijom rješavaju se navedene jednačine (Bernese GPS Software Version 5.0.), postupnim približavanjem rješenju zahtjevane tačnosti. Na osnovu radijus vektora rS (t) položaja satelita i vektora rPS (t) između satelita S i tačke P na površi Zemlje (v. Slika 4.8.) određuje se vrijednost nepoznatog geocentričkog radijus vektora, rP (t) = rS (t) − rPS (t) = rS (t) − ePS ⋅ rPS (t) , (4.4-6) istovremenim određivanjem jediničkog vektora ePS i geometrijskog rastojanja ρPS = rPS (t) . Jednoznačnost položaja tačke P (tzv. apsolutno određivanje) postiže se kada se nalazi u presjeku (za GPS mjerenje) najmanje četiri sfere poluprečnika ρ i , j = rPiS, j ( t ) . Tačnost položaja zavisi od tačnosti orbite i stanja sredine prenošenja signala. Smanjenje sistematskih uticaja može se ostvariti tzv. relativnim pozicioniranjem, između tačaka P i Q na površi, prema izrazu, Višnjić, I. R. (2011): GEODETSKO ODREĐIVANJE SAVREMENIH VERTIKALNIH POMJERANJA ZEMLJINE KORE... (DOKTORSKA DISERTACIJA) 55 4. GEODETSKA MJERENJA VERTIKALNIH POMJERANJA ZEMLJINE KORE II. GEODETSKI OBRNUTI DINAMIČKI ZADATAK rPQ (t) = rPS (t) − rQS (t) = ePS (t) ⋅ rPS (t) − eQS (t) ⋅ rQS (t) , (4.4-7) sa oznakama veličina prema objašnjenjima uz izraz (4.4-6). Kodno pseudo-rastojanje između mjerne stanice Pk i satelita Si, može se izraziti jednakošću, Pki (t) = c0 ⋅ (t + δk ) − (t − τ + δi ) (4.4-8) Pki (t) = ρik + c0 ⋅ δk − c0 ⋅ δi , gdje su, c 0, t = t k − δk , ρik = c0 ⋅ τ, tk, δ k, δi, τ, brzina svjetlosti u vakuumu; planirana vremenska epoha mjerenja u sistemu GNSS vremena; geometrijsko rastojanje između faznog centra prijemne k i predajne antene i; očitavanje časovnika prijemnika, pri prijemu signala; odstupanje časovnika prijemnika od GNSS vremena u epohi t; greška očitavanja satelitskog časovnika; trajanje prenošenja signala od satelita i do prijemnika k. Fazno pseudo-rastojanje zasniva se na mjerenju razlika između dvije faze u prijemniku, ψ if ,k (t) = Φ f ,k (t) − Φif (t − τ) + N if ,k , (4.4-9) gdje su, ψ if , k ( t ) , Φ f ,k (t) , fazno mjerenje (u periodama) u epohi t i frekvencijom f (1 ili 2); faza oscilatora prijemnika u trenutku t emitovanja signala; Φ if ( t − τ) , faza oscilatora satelita u trenutku (t - τ) emitovanja signala; N if ,k , nepoznati cijeli broj perioda ili tzv.početna fazna neodeređenost (PA). Množenjem jednakosti (4.4-9), talasnom dužinom λF[m] i sređivanjem izraza, dobija se fazno pseudorastojanje u metrima, Lif ,k [ m ] = ρik + c0 ⋅ δ k − c0 ⋅ δi + λ f ⋅ N if ,k . (4.4-10) Potpunije modelske jednačine kodnih i faznih pseudo-rastojanja dobijaju se uključivanjem grešaka mjerenja i instrumentalnih, atmosferskih i relativističkih uticaja (Blagojević, 2003). Rezultati mjerenja kodnih i faznih pseudo-rastojanja opterećeni su slučajnim i sistematskim greškama. Glavni izvori sistematskih grešaka su: orbite, časovnici satelita i prijemnika, sredina prenosa signala, relativistički uticaji, poremećaji faznih centara antena itd. koje se moraju pažljivo modelovati. Poseban značaj ima modelovanje grešaka uzrokovane troposferskom i jonosferskom refrakcijom. Stohastički modeli kodnih i faznih pseudo-rastojanja definišu stohastička svojstva mjernog šuma, sa prethodnim isključenjem sistematskih uticaja iz rezultata GNSS mjerenja. Izvori grešaka su u kosmičkom i korisničkom dijelu, kao i u sredini prenošenja elektromagnetskih signala. Izvori najvećih sistematskih grešaka mjerenja, u kosmičkom dijelu GNSS, predstavljaju oscilatori satelita. Odstupanje njihovih vremenskih skala neprekidno se određuje u odnosu na skup časovnika kontrolnog dijela GNSS i dostavlja se navigacionim porukama korisnicima, u obliku prognoziranih polinomskih koeficijenata, sa tačnošću od oko 20 ns ili oko 6 m pseudo-rastojanja. U korisničkom dijelu GNSS, izvori sistematskih grešaka su u časovnicima prijemnika, kašnjenju signala pri prolasku kroz prijemnik, varijacijama faznog centra prijemne antene i odstupanju usvojenog od stvarnog položaja mjerne stanice. Stanje, raspodjela mase i fizičko-hemijske pojave u atmosferi uzrokuju promjenu putanje i brzinu kretanja elektromagnetskih talasa, i posljedično, sistematsku grešku izmjerenog pseudo-rastojanja. Jonosfera i troposfera dijelovi (slojevi) su atmosfere, sa najznačajnijim sistematskim uticajem na tačnost rezultata GNSS mjerenja pseudo-rastojanja. 56 Višnjić, I. R. (2011): GEODETSKO ODREĐIVANJE SAVREMENIH VERTIKALNIH POMJERANJA ZEMLJINE KORE... (DOKTORSKA DISERTACIJA) II. GEODETSKI OBRNUTI DINAMIČKI ZADATAK 4. GEODETSKA MJERENJA VERTIKALNIH POMJERANJA ZEMLJINE KORE Troposferska refrakcija (∆ρk,i) posljedica je uticaja nejonizovanog dijela atmosfere na prenos signala. Ne zavisi od frekvencije, pa je jednak uticaj na mjerenja kodnih i faznih pseudo-rastojanja. Troposferski sistematski uticaji, uglavnom, otklanjaju se unošenjem popravaka u rezultate mjerenja, na osnovu modela troposfere, pri čemu se potrebni parametri mjere ili određuju iz modela standardne atmosfere. Za dobijanje visokotačnih rezultata, uticaji troposfere određuju se rješavanjem proširenih funkcionalnih modela GNSS mjerenja. Jonosferska refrakcija (Ik,i) utiče na disperziju mikrotalasnih signala, uzrokujući greške pseudorastojanja, koje zavise od frekvencije nosećih talasa (proporcionalna je odnosu kvadrata frekvencija nosećih talasa L1 i L2, tj. I ik ⋅ (f12 / f 22 ) ). Jonosferski sistematski uticaji otklanjaju se uključivanjem popravaka u rezultate mjerenja, na osnovu navigacione poruke, interpolacije i jonosferskih karata. Smanjenje uticaja ostvaruje se prostim, dvostrukim i trostrukim razlikama pseudo-rastojanja. Dvofrekventnim mjerenjem, sa odgovarajućim linearnim kombinacijama pseudo-rastojanja, otklanja se glavni dio jonosferskog uticaja na rezultate GNSS mjerenja. Korišćenjem dvostrukih razlika originalnih opažanja, u uzastopnim vremenskim epohama t1 i t2, mogu se obrazovati trostruke razlike u prethodnoj obradi i proučavanju rezultata mjerenja, j j Li,1,k,l (t 2 ) − Li,1,k,l (t1 ) = ρi,k,lj (t 2 ) − ρi,k,lj (t1 ) − Ii,k,lj (t 2 ) − Ii,k,lj (t1 ) , j Li,2,k,l (t 2 ) − j Li,2,k,l (t1 ) = ρi,k,lj (t 2 ) − ρi,k,lj (t1 ) (4.4-11) f2 − 12 ⋅ I i,k,lj (t 2 ) − Ii,k,lj (t1 ) , f2 gdje su, k, l, i, j, f1, f2, par GNSS (GPS) prijemnika; par GNSS (GPS) satelita. frekvencije nosećih GNSS (GPS) talasa. U obje jednakosti (4.4-11), smatra se da su fazne neodređenosti otklonjene, što je i najznačajnija prednost korišćenja trostrukih razlika (zbog niže tačnosti, ne koriste se za geodetski GNSS premjer). GLONASS koristi FDMA tehnologiju za otkrivanje pojedinačnih satelita, pa jednačina opažanja dvostruke razlike ima oblik, j , Li,k,lj = ρi,k,lj + Ni,k,lj ⋅ λi + ∆λi, j ⋅ N k,l (4.4-12) gdje su, N ik,,jl , neodređenost dvostruke razlike, prema prijemnicima k, l i satelitima i, j; N kj ,l , neodređenost jednostruke razlike, prema prijemnicima k, l i satelitima j; λi , talasna dužina nosećeg signala satelita i; razlika talasnih dužina nosećeg signala između satelita j i i, λi = λ j + ∆λi , j ; ∆λ i, j , j , b = ∆λi, j ⋅ N k,l neslaganje jednostruke razlike. Položaj mjerne stanice, na fizičkoj površi Zemlje, izražava se pravouglim koordinatama u inercijalnom referentnom sistemu (Slika 4.9.), na osnovu geometrijskog rastojanja ρik između prijemne rk (t) i predajne ri (t − τ) antene (Slika 4.8.), ρik = c0 ⋅ τ = rk (t) − r i (t − τ) , i r (t − τ) = r i (t) − r i (t) ⋅ τ (4.4-13) popravljenog za vrijednosti ekscentričnih rastojanja prijemnih ∆rk (t) i predajnih ∆rk (t − τ) antena, u odnosu na geometrijsko središte mjerne stanice i centar mase satelita. Postupkom određivanja tzv. apsolutnog položaja tačaka dobijaju se položaji tačaka i odstupanja časovnika GNSS prijemnika, za linearizaciju dvostrukih razlika i računanja sinhronih članova časovnika. Tačnost horizontalnog položaja σP, visine σh i odstupanja časovnika σδ izračunavaju se iz kovarijacione matrice KGNSS nepoznatih parametara (Blagojević, 2003), Višnjić, I. R. (2011): GEODETSKO ODREĐIVANJE SAVREMENIH VERTIKALNIH POMJERANJA ZEMLJINE KORE... (DOKTORSKA DISERTACIJA) 57 II. 4. GEODETSKA MJERENJA VERTIKALNIH POMJERANJA ZEMLJINE KORE GEODETSKI OBRNUTI DINAMIČKI ZADATAK σP = K BB + K LL = σ0 ⋅ HDOP, 1 3 K BB = K LL = σ02 ⋅ ⋅ , π 2 − 3 ⋅ cos Z0 + cos3 Z0 1 3 σh = K hh = σ0 ⋅ VDOP, K hh = σ02 ⋅ ⋅ , π (1 − cos Z0 )3 σδ = K δδ = σ0 ⋅ TDOP, K δδ = σ02 ⋅ (4.4-14) 1 1 − cos 3 Z0 ⋅ , π (1 − cos Z0 ) 4 na osnovu popravaka nepoznatih elipsoidnih koordinata (B, L) i visina (h), kao i odstupanja časovnika u jedinicama dužine (c0⋅δ), u zavisnosti od graničnog zenitnog odstojanja Z0 i geometrije satelita DOP. Za standard σC/A = 3 m kodnih C/A pseudo-opažanja i zenitsko odstojanje Z0 = 750, u jednoj epohi mjerenja, položajna tačnost iznosi σP = 3,6 m, tačnost visina σh = 6,3 m i tačnost časovnika σδ = 14 ns. Tačnost horizontalnog položaja i visina značajno se može poboljšati povećanjem broja epoha mjerenja, ali se tačnost časovnika, u tom slučaju, ne mijenja, jer se ocjenjuje posebno za svaku vremensku epohu. Za praktičnu opravdanost, dovoljno je 10-20 mjernih epoha za zadovoljenje mjerila kvaliteta modelovanja dvostrukih faznih razlika. Ostvarenje zadovoljavajuće tačnosti tzv. relativnog položaja, prvenstveno zavisi od određivanja cjelobrojnih vrijednosti faznih neodeređenosti (v. Blagojević, 2003). Najvjerovatnije vrijednosti koordinata GNSS mjernih stanica uključuju se u odgovarajući terestrički referentni sistem (međunarodni, kontinentalni, državni i sl.) i prevode se vrijednosti elipsoidnih u fizičke visine (ortometrijske, normalne, normalne ortometrijske). U GNSS premjeru terestrički referentni sistemi (TRS) namjenjeni su za: • određivanje satelitskih orbita GNSS, radarske altimetrije, InSAR i sl. i • određivanje položaja mjernih stanica i geodetskih tačaka na Zemljinoj površi. Prevođenje prostornih koordinata GNSS mjernih stanica, srednje epohe tC, u terestrički referentni sistem, ostvarujući TRFYY, vrši se na sledeći način (Boucher, Altamimi, 2007): 1) obrada GNSS podataka u epohi tC, na osnovu tačno određenih koordinata mjernih stanica i koordinata (dopunski uslov) u postojećem TRFYY ( epoha tC), X(A; t C ) = X(A; t 0 ) + X(A) ⋅ (t C − t 0 ) = X ( TRFYY ;t C ) , (4.4-15) 2) primjena modela tansformacije iz sistema GNSS (sistem A) u TRSYY (sistem B) u epohi tC, ∂ℜ(t) X(B; t C ) = X(A; t C ) + Τ(A, B; t C ) + D ⋅ X(A; t C ) + ⋅ X(A; t C ) ⋅ (t C − t YY ), ∂t 3) prevođenje u vremensku epohu tYY (4.4-16) , X(B; t YY ) = X(B; t C ) + X(B) ⋅ (t YY − t C ) , (4.4-16′) gdje je X(B) ocjena brzine referentne tačke u sistemu B (TRSYY). Za stabilnu Zemljinu koru, često se usvaja X(B) = 0 , kao dopunski uslov pri prevođenju (transformaciji) koordinata. U izrazu (4.4-16) učestvuju veličine i parametri (v. Moritz, Mueller, 1988): ℜ 3x 3 ( A, B; t C ) = S( − x POL ,− y POL ) ⋅ N ( −ε,−∆ε,− ∆ψ ) ⋅ P ( −z A , θ A ,−ζ A ) , (4.4-16″) gdje su: ℜ 3x 3 (A, B; t C ) , S( − x POL ,− y POL ) , N ( − ε , − ∆ε , − ∆ψ ; ε ) , P ( − z A , θ A , −ζ A ) , T Τ(A, B; t C ) = [∆X, ∆Y, ∆Z] , D(A, B; t C ) = λ A ,B − 1 , 58 rotaciona transformaciona matrica; matrica rotacije zbog pomjeranja polova Zemlje; matrica rotacije zbog nagiba ekliptike i nutacije u longitudi i nagibu ekliptike ; matrica rotacije zbog precesije; vektor translacije duž koordinatnih osa X, Y, Z; faktor jedinice mjere (razmjera) za dužinu. Višnjić, I. R. (2011): GEODETSKO ODREĐIVANJE SAVREMENIH VERTIKALNIH POMJERANJA ZEMLJINE KORE... (DOKTORSKA DISERTACIJA) II. GEODETSKI OBRNUTI DINAMIČKI ZADATAK 4. GEODETSKA MJERENJA VERTIKALNIH POMJERANJA ZEMLJINE KORE Zbog vremenskih promjena veličina u (4.4.-16), neophodno je koristiti 14 (četrnaest) transformacionih parametara (tri translacije, tri rotacije i faktor razmjere, sa njihovim brzinama promjena u vremenskom intervalu (t YY − t C ) ) za definisanje datuma TRS, za vremensku epohu tYY (npr. 2005. god.) uspostavljajući (a) koordinatni početak (geocentar), (b) razmjeru koordinatnog sistema, (c) orijentaciju i (d) ocijenu vremenskih promjena (brzina) koordinata u periodu (tYY-tC) (Boucher, Altamimi, 2007). Pri uspostavljanju TRS, pored standardnih uslova mjerenja, moraju se isključiti visoko-učestali uticaji pomjeranja Zemljine kore i površi. To se ostvaruje tzv. regularizacijom položaja tačaka, na osnovu odgovarajućih modela kretanja litosferskih ploča, uticaja plimskog potencijala na Zemlju, pomjeranja polova i geocentra, opterećenja masama okeana i atmosfere i sl. (Drewes, Meisel, 2005; Petrov, et. al., 2008; Jin, Zhu, 2004; Petit, Luzum, 2008; Altamimi, 2008). Opšti model povezivanja položaja tačke ∆X(t) u epohi t, na površi Zemljine kore, i uslovljeni (regularizovani) položaj X R (t) iste tačke, X(t) = X R (t) + n ∑ ∆X (t) , (4.4-17) i i obuhvata sporazumne popravke ∆X i (t) za dobijanje položaja X( t ) , sa pravilnim vremenskim promjenama. U tom slučaju, ∆X R (t) može se ocjenjivati korišćenjem odgovarajućih modela i brojčanih vrijednosti. Postojeći model je linearan (položaj i brzina u referentnoj vremenskoj epohi t0), X R (t) = X 0 + X ⋅ (t − t 0 ) , (4.4-18) a brojčane vrijednosti daju se za početne vrijednosti X 0 i prosječne brzine promjena X . Uticaj plimskog potencijala tijela Zemlje (plime Zemljine kore, okeansko i atmosfersko plimsko opterećenje, pomjeranje litosferskih ploča i sl.), relativističke razmjere i položaj geocentra moraju se uključiti da bi se dobili najvjerovatniji položaji referentnih tačaka na osnovu rezultata GNSS mjerenja. Dobijene vrijednosti geocentričnih pravouglih koordinata X(TRFYY ) , pomoću izraza X X(TRFYY ) = Y Z TRF YY (N + h) ⋅ cos B ⋅ cos L , = (N + h) ⋅ cos B ⋅ sin L 2 N ⋅ (1 − e ) + h ⋅ sin B TRFYY (4.4-19) postupnim približavanjem, prevode se u elipsoidne (B, L, h) koordinate, h(TRFYY ) = X2 + Y2 a a−b − N(a,f ), N(a,f ) = ; e 2 = 2 ⋅ f − f 2 ;f = , 2 2 cos B a 1 − e sin B (4.4-20) (N + h) ⋅ sin B Y B(TRFYY ) = arctan , L(TRFYY ) = arctan , 2 2 X TRFYY X + Y TRFYY za dobijanje vrijednosti geopotencijalnih brojeva, fizičkih visina i njihovih vremenskih promjena, 0,3086 [ mGal / m] ⋅ H C H (P) = P , γ ≈ γ m = γ0 − γ 2 N γ0 = N −6 N [ m] + 0,072 ⋅10 [ mGal / m] ⋅ ( H [ m]) 2 a ⋅ γ e ⋅ cos 2 B + b ⋅ γ p ⋅ sin 2 B 2 2 2 2 2 , (4.4-21) , HN ≈ h a ⋅ cos B + b ⋅ sin B CP,E = −∆WP = W0,E − WP = W0,E − U P − TPGGM = W0,E − U 0 − ∂U 0 TRF h P − TPGGM , ∂h H(t) = H(t 0 ) + h TRFXX ⋅ (t − t 0 ) , pod uslovom jednakosti brzina ∂(h;H)/∂t promjena fizičkih H(t) i elipsoidnih h(t) visina, ∂h ∂H , h(t) = ν(h i ) = = ν(H i ) = H(t) TRFxx = ∂t ∂t Višnjić, I. R. (2011): GEODETSKO ODREĐIVANJE SAVREMENIH VERTIKALNIH POMJERANJA ZEMLJINE KORE... (4.4-22) (DOKTORSKA DISERTACIJA) 59 II. 4. GEODETSKA MJERENJA VERTIKALNIH POMJERANJA ZEMLJINE KORE GEODETSKI OBRNUTI DINAMIČKI ZADATAK istovremeno povezujući geometrijski i dinamički pristup geodetskom određivanju vertikalnih pomjeranja Zemljine kore i površi. Postupak GNSS mjerenja elipsoidnih visina h(t) i vremenskih promjena h ( t ) , može se opisati na sledeći način: korišćenje položaja mjernih GNSS stanica u TRF; korišćenje proizvoda IGS u jedinstvenom TRF; korišćenje koordinata izabranih geodetskih tačaka u ispitivanju GNSS mjerenja; prevođenje rezultata GNSS prostornih koordinata tačaka, na fizičkoj površi Zemlje, u odgovarajući TRF izabrane vremenske epohe; određivanje vrijednosti elipsoidnih koordinata (B, L, h) i njihovih vremenskih promjena; određivanje fizičkih veličina u VRS i VRF. ECGN je kinematička mreža koja objedinjava: (a) vremenske serije geometrijskih GNSS opažanja, (b) geometrijski nivelman, (c) gravimetrijska apsolutna i relativna mjerenja, (d) mareografska mjerenja, (e) meteorološke podatke, (f) podatke o mjesnim vezama tačaka, (g) stanju i okolini mjernih stanica i sl. ECGN omogućava ostvarivanje Evropskog vertikalnog referentnog sistema (npr. EVRS 2007), izborom i vrednovanjem podataka o fizičkim visinama, prikupljanjem i pripremanjem novih rješenja VRS i uspostavljanjem jednoobraznog i jedinstvenog sistema fizičkih visina. 4.5. InSAR mjerenje Radar je mjerni uređaj, sa predajno-prijemnom antenom, za mjerenje rastojanja i vremena u mikrotalasnom području elektromagnetskih talasa (EMT) - talasne dužine od 1,0 mm do 1000,0 mm i trajanja signala od 10 µs do 50 µs (v. Tabela 4.2.). Glavna svojstva EMT izražavaju se talasnom dužinom λ, amplitudom A, fazom φ i frekvencijom f (EMT pripadaju: svjetlost, X zraci, radiotalasi, mikrotalasi i gama zraci; riječ radio, u skraćenici „radar“, ima isključivo istorijski značaj). Tabela 4.2. Grupa, talasna dužina i frekvencija radarskih EMT Grupa talasa radara Talasna dužina λ[mm] Frekvencija f[GHz] Uobičajena talasna dužina λ[mm] PRIMJER, NAPOMENA X 24,00 – 37,50 12,50 – 8,00 30,00 djelimično prodiru kroz krošnju drveća C 37,50 – 75,00 8,00 – 4,00 60,00 prodiru kroz krošnju drveća L 150,00 – 300,00 2,00 – 1,00 235,00 (250,00) prodiru kroz površinski dio zemljišta P 300,00 – 1000,00 1,00 – 0,30 680,00 prodiru u dublje slojeve zemljišta Radar je radni predajno-prijemni mjerni uređaj (tzv. aktivni senzor) koji emituje i prima EMT pomoću predajno-prijemnih antena. Povratni impulsi sadrže podatke i parametre o fazi, amplitudi, polarizaciji, vremenskoj razlici predaje i prijema signala i sl. Vremenski interval kašnjenja (δt) prijemnog signala koristi se za računanje rastojanja između radarske antene i objekta opažanja i predstavlja osnovu mjerenja radarom. Opšta istraživačka upotreba radara, na vazduhoplovima, započela je 1969. god. za potrebe kartografisanja Zemlje, prvenstveno, u oblasti geoloških istraživanja (v. www.usgs.gov/). Razvoj satelitske i radarske tehnologije uslovili su razvijanje satelitskih radarskih sistema sa različitim tehnikama snimanja (RAR, SAR, InSAR, PS InSAR) i svojstvima snimaka (tačnost, preciznost, prostorna rezolucija, dosljednost, potpunost itd.) sistema Zemlje. Od početka 1990. god. sa SAR i InSAR tehnikama snimanja razvijali su se, uglavnom, satelitski radarski sistemi ERS-1,2 (ESA), JERS-1 (Japan), Almaz-1 (Sovjetski Savez), Radarsat (Canada), ERS-2, Envisat (ESA), SRTM (NASA, USA) itd. (v. Prilog 4.4.). Dužina radarske antene na vazduhoplovima (oko 2 m) i satelitima (oko (10-15) m) ograničena je u fizičkom pogledu. Prevazilaženje ograničenja ostvaruje se elektronskim „sintetičkim“ produžavanjem, pomoću pokretnih RAR antena - kao niz položaja na putanji nosača radara, sa bilježenjem Doppler-ovih podataka o objektu snimanja. 60 Višnjić, I. R. (2011): GEODETSKO ODREĐIVANJE SAVREMENIH VERTIKALNIH POMJERANJA ZEMLJINE KORE... (DOKTORSKA DISERTACIJA)
© Copyright 2026 Paperzz