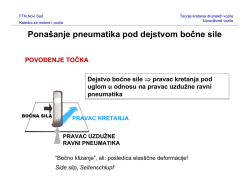
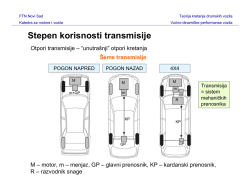
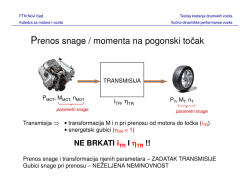
FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Otpori kretanja motornog vozila OTPORI KRETANJA DRUMSKIH VOZILA • Otpor kotrljanja • Otpor vazduha UVEK PRISUTNI • Otpor uspona • Otpor inercije • Otpor priključnog vozila JAVLJAJU SE U ODREĐENIM USLOVIMA Pri manjim brzinama zanemarljiv FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Otpori kretanja motornog vozila Otpor kotrljanja Sila otpora kotrljanja za pojedinačni točak: Sila otpora kotrljanja za celo vozilo: Ff = f⋅G Ff = f⋅GT Ff = f⋅ΣGTi = f⋅G ZA HORIZONTALNU PODLOGU Prilikom vožnje na uzdužnom nagibu, za otpor kotrljanja merodavna je komponenta sile težine normalna na podlogu! Ff = f⋅G⋅cosα G⋅sinα G⋅cosα f = 0,01+5,4⋅10-6⋅v+10-11⋅v4 G ∼ 1% FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Otpori kretanja motornog vozila Otpor vazduha ρ ⋅ v2 FW = c W ⋅ A⋅ 2 FW = → Za osnovne jedinice 0,0473⋅cW⋅A⋅v2 za: ρ=1.225 kg/m3, w=60 %, t=15 oC FW(N), cW(-), A(m2), v(km/h) FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Otpori kretanja motornog vozila Otpor uspona Fα = G⋅sinα G sin α T G cosα α G Uspon [%] Ugao α [°] Označavanje uspona u procentima: u = tgα⋅100% 5 2,86 10 5,71 15 8,53 20 11,31 100 45 FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Otpori kretanja motornog vozila Otpor uspona Izvor: Fahrzeuggetriebe FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Otpori kretanja motornog vozila Otpor uspona Fα = G⋅sinα Za male uglove važi: tgα ≈ sinα 1,2 1 tg α 0,8 0,6 Uspon: u = tgα⋅100% sin α 0,4 0,2 ⇓ u Fα ≈ ⋅G 100 0 0 5 10 15 20 25 30 35 40 45 α [°] FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Otpori kretanja motornog vozila Otpor inercije J3, ωT A J1, ωMOT J2, ω2 Motor: MMOT C D B Točak: MT Za ustaljeno (v = const) kretanje važi: FO = MT MMOT ⋅ iTR ⋅ ηTR = rD rD FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Otpori kretanja motornog vozila Otpor inercije J3, ωT A J1, ωMOT J2, ω2 C D B & MOT = MMOT − MA J1⋅ ω & 2 = MB − MC J2 ⋅ ω & T = MD − MT J3 ⋅ ω Prilikom ubrzanja: → MA < MMOT → M C < MB → M T < MD ⇒ MT ≡ FO rD FO < MMOT ⋅ iTR ⋅ ηTR rD ! Obimna sila je manja nego pri v = const FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Otpori kretanja motornog vozila Otpor inercije FO < MMOT ⋅ iTR ⋅ ηTR rD Deo momenta motora se “potroši” na ubrzavanje rotacionih masa → nije u celokupnom iznosu za ostvarivanje vučne sile na točku! Smanjenje vučne sile ⇒ smanjenje ubrzanja Pojednostavljenje: Ovo smanjenje uzima se u obzir redukcijom rotacionih masa na pogonski točak, tj. uvećanjem mase čija se inercija savlađuje. Dakle: uzima se da je FO = uvećanom masom vozila! MMOT ⋅ iTR ⋅ ηTR , ali se računa sa fiktivno rD Umesto FIN = m⋅a, uzima se dakle: FIN = δ⋅m⋅a, δ > 1 FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Otpori kretanja motornog vozila Otpor inercije FIN = δ⋅m⋅a δ > 1 – koeficijent učešća obrtnih masa → DETALJNIJE U POGLAVLJU O UBRZANJU FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Otpori kretanja motornog vozila Otpor priključnog vozila Vučno vozilo mora savladati i sve komponente otpora kretanja priključnog vozila, ukoliko je spregnuto. FP FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Otpori kretanja motornog vozila Otpori kretanja drumskih vozila – rezime • Otpor kotrljanja • Otpor vazduha • Otpor uspona • Otpor inercije f = f(v) Ff = f⋅G⋅cosα FW = 0,0473⋅cW⋅A⋅v2 Fα = G⋅sinα FIN = δ⋅m⋅a • Otpor priključnog vozila Fα ≈ u ⋅G 100
© Copyright 2026 Paperzz