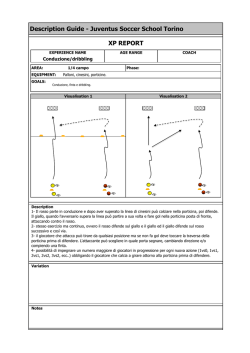
Cenni di Teoria dei Giochi - 2 Maria-Augusta Miceli∗ Dipartimento di Economia e Diritto Università di Roma "La Sapienza" Lezioni di Economia Industriale 2 November 7, 2014 Abstract Elementi di teoria dei giochi necessari ad implementare e risolvere giochi statici e dinamici con informazione completa e incompleta. Particolare attenzione e dettagli di soluzione sono esposti per i giochi bayesiani dinamici con informazione incompleta. Elements of game theory necessary to implement and troubleshoot static and dynamic games with complete information and incomplete are exposed. Particular attention and details are given for the dynamic Bayesian games with incomplete information. KEYWORDS: Game Theory, Games, Incomplete information, Complete Information, Nash Equilibrium, Backward Induction, Bayesian Games, beliefs, Perfect Equilibrium, Signalling. JEL: A20, A22, A23, B40, B41, C11, C70, C73, D80, D81, D82, D83, L13, L15. ∗ Department of Economics and Law, University of Rome "Sapienza" - 9 via del Castro Laurenziano - 00161 Roma - Italy. Email: [email protected]. 1 1 Giochi statici con informazione completa da Gibbons (italiano) pp. 1-33. Definizione 1 Un gioco in forma normale ha: 1. giocatori: i = 1, ..., n; 2. uno spazio di strategie per ogni giocatore si ∈ Si , ∀i = 1, ..., n; 3. una funzione di utilità o payoff per ogni giocatore: ui ∀i = 1, ..., n. Il gioco è indicato con G = {S1 , ..., Sn ; u1 , ...un } Definizione 2 Gioco a "informazione completa" è un gioco in cui la funzione di payoff è nota a tutti i giocatori (è "common knowledge"). Esempio. Dilemma del prigioniero Prigioniero 1 C NC Prigioniero C −1, −1 0, −9 2 NC −9, 0 −5, −5 dove • C= confessare / cooperare e NC = tacere/non confessare/ non cooperare. • n = 2; • S1 = S2 = {C, N C} Prigioniero 1 C1 N C1 Prigioniero C2 u1 (C1 , C2 ) , u2 (C1 , C2 ) u1 (N C1 , C2 ) , u2 (N C1 , C2 ) 2 NC2 u1 (C1 , NC2 ) , u2 (C1 , N C2 ) u1 (N C1 , NC2 ) , u2 (N C1 , N C2 ) Nella matrice, il payoff a sinistra è generalmente riferito al giocatore che ha le strategie sulle colonne e a destra il payoff del giocatore che ha le strategie sulle righe. Definizione 3 In G = {S1 , ..., Sn ; u1 , ...un } siano s0i e s00i ∈ Si , si dice che la strategia s0i è strettamente dominata dalla strategia s00i se, per ogni combinazione ammissibile di strategie degli altri che chiamo s−i , ui (s0i , s−i ) < ui (s00i , s−i ) , ∀s−i ∈ S−i (1) Definizione 4 Chiamiamo l’insieme di strategie che sopravvivono all’eliminazione iterativa delle strategie "insieme delle strategie strettamente dominanti" (SD) . In generale per qualche giocatore potrebbero restare più strategie: in questo caso questa nozione non individua un equilibrio singolo. Vedere esempi su Gibbons pp. 16-17. La strategia di Nash indica la mossa che costituisce la miglior risposta di un agente alla mossa dell’altro e questo vale per ogni mossa dell’altro. Definizione 5 Una strategia (mossa, nel gioco statico) s∗i ∈ Si è detta la "miglior risposta" (best response) all’azione degli altri (n − 1) agenti se e solo se, per mosse discrete ui (s∗i , s−i ) ≥ ui (si , s−i ) , ∀s−i ∈ S−i (2) per mosse definite nel continuo s∗i : max ui (si , s−i ) si ∈Si 2 (3) Definizione 6 In G = {S1 , ..., Sn ; u1 , ...un } l’equilibrio di Nash in strategie pure è l’insieme di strategie (s∗1 , ..., s∗n ) tali che tutti gli agenti stiano effettuando la loro miglior risposta alle miglior risposte degli altri. ∀i ¡ ¢ ¡ ¢ ui s∗i , s∗−i ≥ ui si , s∗−i , ∀si ∈ Si (4) dove ¡ ¢ max ui si , s∗−i s∗i : si ∈Si Esempi Gibbons pp. 20-21 e 24-33. (5) © ¡ ¢ ¡ ¢ª Definizione 7 Miglioramento Paretiano. Un’allocazione ui s0i , s0−i , u−i s0i , s0−i è preferita paretianamente ad un altra {ui (si , s−i ) , u−i (si , s−i )}, se © ¡ 0 0 ¢ ¡ ¢ª ui si , s−i , u−i s0i , s0−i ≥ {ui (si , s−i ) , u−i (si , s−i )} per tutti gli i, si © ¡ 0 0 ¢ ¡ ¢ª ui si , s−i , u−i s0i , s0−i > {ui (si , s−i ) , u−i (si , s−i )} per almeno un i dove i sta per consumatore i-esimo. Un miglioramento paretiano è un miglioramento che favorisce alcuni, senza peggiorare nessuno degli altri. Quindi è un criterio che la totalità degli agenti approva. Definizione e’ ¢ª Pareto Ottima (o Pareto Efficiente) se, non esiste alcuna allocazione © 8¡ Un’allocazione ¢ ¡ diversa da ui s0i , s0−i , u−i s0i , s0−i che dia un miglioramento paretiano ad alcuni senza peggiorare altri. Esempi. Trovare gli ottimi paretiani di Gioco 1 Flic e Floc Flic Floc Flic 1,1 0,0 Floc 0,0 1,1 Gioco 2 Battle of Sexes Antonio \ Maria Calcio Cinema Calcio 2,1 0,0 Cinema 0,0 1,2 Gioco 3 Testa o Croce (Matching Pennnies) T C T 1,-1 -1,1 C -1,1 1,-1 Gioco 4 Gioco di coordinazione (Coordination Game) A B A 5,5 0,0 B 0,0 3,3 Gioco 5 Dilemma del Prigioniero C NC C -1,-1 0,-9 NC -9,0 -5,-5 Proposizione 1 In G = {S1 , ..., Sn ; u1 , ...un } se l’eliminazione iterata di strategie strettamente dominate rimuove tutte le strategie tranne (s∗1 , ..., s∗n ) , allora queste sono un equilibrio di Nash(EN ) Ovvero, se esiste un unico equilibrio in strategie non dominate Ovvero se ∃!SD (se esiste ed è unico) =⇒ allora questo è un EN. Proposizione 2 Se le strategie (s∗1 , ..., s∗n ) sono un EN =⇒ SD esse sopravvivono all’eliminazione iterata delle strategie. 3 Dimostrazioni. NO • Proprietà dell’equilibrio di Nash(EN). L’EN è stabile, perché per ogni data mossa o strategia dell’altro, la mossa o strategia dell’individuo in questione è quella ottima, quindi per lui non esiste incentivo a deviare dalla strategia di Nash. osservazione 1 Tale equilibrio presuppone , affiché gli agenti possano attuare la propria strategia ottima, che tutti gli agenti Ipotesi 1 siano razionali; mentre l’ipotesi di razionalità non è affatto sempre verificata nella realtà; Ipotesi 2 siano a conoscenza non soltanto dei prorpi payoffs, ma anche di tutti i payoffs degli altri giocatori e del fatto che tutti sanno che gli altri sanno: ipotesi di "conoscenza comune" ("Common Knowledge"); anche questa ipotesi è difficilmenteverificata nella realtà. 1.1 Strategie MAXIMIN e MINIMAX Per ovviare alla eventuale carenza di razionalità delle contropartie alla carenza di informazione sui payoffs altrui, il giocatore può decidere di giocare la strategia di Maximin, la quale rappresenta la strategia che garantisce la minimizzazione delle possibili perdite. G1 si vuole garantire un payoff di almeno v1 = maximin Per giochi matriciali qualunque i valori v 1 ≤ v1 e in effetti i payoffs di G1 non sono necessariamente pagamenti da parte di G2. Definizione 9 Il gioco a somma zero (Zero Sum Game) è un gioco in cui i payoffs di ogni casella sommano a zero, ovvero la vittoria di un giocatore è la perdita dell’altro. Proposizione 3 Nei giochi a somma zero v1 = EN = v 1 ovvero il valore del gioco dovuto alla strategia minimax è pari al valore del gioco nella strategia di maximin ed entrambi coincidono anche con l’equilibrio di Nash del gioco. Esercizio. Dimostrare la Proposizione per il Dilemma del Prigioniero. Dato il gioco Gioco 6 G1\ G2 A B C D 1.1.1 SinDes 0,0 0.5,-0.5 -0.5,0.5 0,0 Des 1,-1 0,0 1,-1 0,0 Maximin G1, calcola il min che ottiene in ogni sua strategia (in ogni riga) min {u1 (s1 , s2 = S) , u1 (s1 , s2 = D)} , s2 ∀s1 ∈ S1 = {0, 0, −0.5, 0} ovvero, • per ogni strategia dell’altro, ∀s2 ∈ S2 , calcola il min payoff u1 , ∀s1 ∈ S1 . • e sceglie poi il payoff massimo fra questi minimi: max {0, 0, −0.5, 0} = {0} . Non è unico. Formalmente il valore Maximin del gioco per G1, v1 , è la soluzione del problema ¸ ∙ v1 = max min u1 (s1 , s2 ) s1 ∈S1 s2 ∈S2 = max {0, 0, −0.5, 0} = 0. 4 Analogamente il valore Maximin del gioco per G2, G2 cerca il min ottenibile in ogni sua strategia, per colonna. v2 , è la soluzione del problema ¸ ∙ v 2 = max min u1 (s1 , s2 ) s2 ∈S2 s1 ∈S1 = max {−0.5, −1} = −0.5 e quindi il v2 = max {−0.5, −1} = −0.5 Quali sono le strategie che portano al maximin? Esiste un equilibrio? Vedrete che l’equilibrio è instabile: se G1 fosse certo che G2 giocasse S, allora giocherebbe B. 1.1.2 Minimax Il Minimax calcola la "vulnerabilità" di ogni giocatore che gli può essere imposta dall’altro. Il Minimax è la generalizzazione della strategia di Deterrenza, studiata all’interno dei metodi per impedire l’entrata alle imprese concorrenti. G2, vuole minimizzare il suo pagamento a G1. In termini di organizzazione industriale, l’impresa 2 vuole minimizzare i profitti dell’impresa concorrrente I1 , nel presupposto che l’impresa 1 provi comunque a massimizzare i propri profitti. (Attenzione! in EOI 1, consideriamo che sia l’impresa 1 a deterrere l’impresa 2, ovvero cerchiamo il minimax v2 ). Calcoliamo il Minimax nel gioco (6). Per calcolare la vulnerabilità di G1 si procede in questo modo: • G2 ha strategie di colonna. G2 calcola il massimo payoff che l’avversario G1 riesce ad ottenere su ogni colonna s2 ∈ S2 , ovvero il max u1 su ogni colonna. Nell’esempio {0.5, 1} . Perché il max u1 ? perché G2 è un ottimizzatore e quindi, per ogni data strategia di G2 (colonna) cercherà il prorio massimo. • G2, per imporre il minimo guadagno a G1, sceglierà la strategia di colonna, dove G1 guadagni meno. Ge sceglie quindi il payoff minimo fra questi massimi: min {0.5, 1} = {0.5} . Formalmente il valore di vulnerabilità di G1 imposto da G2 è il Minimax del gioco per G1 ed è la soluzione del problema ¸ ∙ v 1 = min max u1 (s1 , s2 ) s2 ∈S2 s1 ∈S1 n o n o = min 0.5 , 1 = 0.5 . Des Si n Des Analogamente, G1 vuole minimizzare il suo pagamento a G2. G1 calcola il max che l’avversario G2 ottiene in ogni strategia s1 , data s2 Ovvero • calcola il max dei payoff di G2 su ogni riga • e ne sceglie il minimo, ovvero, e sceglie poi il payoff minimo fra questi massimi: min {0, 0, 0.5, 0} = {0} . Formalmente il valore Minimax del gioco v2 per G2 è la soluzione del problema ¸ ∙ v 2 = min max u2 (s1 , s2 ) s1 ∈S1 s2 ∈S2 n o = min 0 , 0 , 0.5, 0 = {0} A B C D Proposizione 4 Nei giochi a somma zero per G1 max s1 ∈S1 ∙ v1 ≤ v1 ¸ ¸ ∙ = min max u2 (s1 , s2 ) min u1 (s1 , s2 ) s2 ∈S2 s2 ∈S2 e analogamente per G2. Proof. Dimostrazione a richiesta. 5 s1 ∈S1 Proposizione 5 Se esiste v1 = v1∗ = v1 v1∗ è un equilibrio di Nash. Quando tale equilibrio non esiste in strategie pure, bisogna considerare le strategie miste. 1.2 Soluzione in strategie miste Definizione 10 In G = {S1 , ..., Sn ; u1 , ...un } , si supponga che Si = {si1 , ..., siK } , dove k = 1, .., K è il numero di strategie. Una"strategiaPmista" per il giocatore i − esimo è una distribuzione di probabilità K μi = (μi1 , ..., μiK ) , con μik ∈ [0, 1] e k=1 μik = 1. Definizione 11 Equilibrio di Nash in strategie miste. Quando qualche giocatore è indifferente fra più di una strategia ottima avremo più equilbri di Nash. Un modo è fare la media fra di essi ponderando ciascuna strategia per una probabilità Calcolo delle probabilità delle strategie miste. Data la matrice G2 q Sinistra G1 p Su 2, −3 1 − p Giù 1, 1 1−q Destra 1, 2 4, −1 1. Si cercano le strategie dominanti: non esistono per alcun giocatore. 2. Si cercano strategie che siano "miglior risposta" alla strategie dell’altro. Nessuna è unica. 3. =⇒ Il gioco non ha equilibrio in strategie pure. 4. Si calcola il payoff atteso per G1 per ogni strategia s1 considerando tutte le strategie dell’altro ponderate da probabilità che sommino ad uno EU1 (Su) = qU1 (Su, Si n) + (1 − q) U1 (Su, Destra) = 2q + (1 − q) u) = qU1 (Gi` u, Si n) + (1 − q) U1 (Gi` u, Destra) EU1 (Gi` = q + 4 (1 − q) La probabilità che rende G1 indifferente fra queste due strategie è q ∗ tale che u) EU1 (Su) ≥ EU1 (Gi` 2q + (1 − q) ≥ q + 4 (1 − q) q ∗ ≥ 3/4 Si calcola il payoff atteso per G2 per ogni strategia s2 considerando tutte le strategie dell’altro ponderate da probabilità che sommino ad uno u, Si n) EU2 (Si n) = pU1 (Su, Si n) + (1 − p) U1 (Gi` = −3p + (1 − p) u, Destra) EU2 (Destra) = pU1 (Su, Destra) + (1 − p) U1 (Gi` = 2p − (1 − p) La probabilità che rende G2 indifferente fra queste due strategie è p∗ tale che EU2 (Sinistra) ≥ EU2 (Destra) −3p + (1 − p) ≥ 2p − (1 − p) p∗ ≤ 2/7 6 • L’insieme {p∗ , q ∗ } è l’equilibrio in strategie miste del gioco. Inserendo tali probabilità in uno qualunque dei payoffs, si calcolano anche EU1∗ , EU2∗ . µ ¶ 3 3 7 (6) EU1∗ (Su|q ∗ = 3/4) = EU1∗ (Gi` u|q ∗ = 3/4) = 2q ∗ + (1 − q ∗ ) = 2 · + 1 − = = 1.75 4 4 4 µ ¶ 2 2 1 EU2∗ (Sinistra|p∗ = 2/7) = EU2∗ (Destra|p∗ = 2/7) = 2p∗ − (1 − p∗ ) = 2 · − 1 − = − = −0.14(7) 7 7 7 Le (6) e (7) sono rispettivamente le strategie "medie" di G1 e G2, ovvero sono una combinazione lineare delle strategie esistenti con i pesi dati dalle probabilità. L’intersezione delle due strategie "medie" dà luogo ad una casella "media" di payoffs che rappresenta l’equilibrio di Nash del gioco in strategie miste. • GRAFICO e verifica delle intersezioni con Gioco Destra e Sinistra, Battle of Sexes e Dilemma del Prigioniero. Applicazioni: Bertrand e Cournot, SI. Teorema esistenza Eq. Nash. NO. 2 Giochi dinamici con Informazione Completa e Perfetta Definizione 12 Informazione completa e perfetta. Ogni giocatore cui spetta la mossa conosce l’intera storia del gioco fino a quel punto, ovvero sa in che nodo dell’albero si trova. Definizione 13 Informazione completa e imperfetta. Il giocatore cui spetta la mossa non è a conoscenza della storia del gioco, ovvero non sa in quale nodo si trova. (Si veda più avanti). Definizione 14 Per "strategia ai ∈ Ai ” si intende l’insieme di mosse che conduce il giocatore dal nodo iniziale al nodo finale, determinando quale mossa il giocatore farebbe in ogni nodo in cui potrebbe essere chiamato a giocare e quindi, importante!, anche cosa farebbe laddove il gioco poi non passa. L’insieme Ai considera tutte le possibili combinazioni di mosse ai . Esempio di "Minaccia non credibile" G1 (paga 1000) / \ (paga 0) / \ G2 G2 | (nulla) / \ (bomba) | | | (−1000) (0) (−∞) (+1000) (0) (−∞) 2.1 Soluzione a ritroso (Backward Induction) 1. Il giocatore 1 sceglie un’azione a1 nell’insieme delle azioni ammissibili A1 2. Il giocatore 2 osserva a1 e sceglie a2 dall’insieme ammissibile A2 3. I payoffs sono u1 (a1 , a2 ) e u2 (a1 , a2 ). Soluzione a ritroso G2 : ∂u2 (a1 , a2 ) =0 ∂a2 G1 : max u2 (a1 , a2 ) a2 =⇒ a∗2 = R2 (a1 ) max u1 (a1 , a2 ) = u1 (a1 , R2 (a1 )) a1 7 ∂u1 (a1 , R2 (a1 )) =0 ∂a1 a∗1 =⇒ Risostituendo indietro ottego a∗2 = R2 (a∗1 ) e dunque u∗1 (a∗1 , a∗2 ) e u∗2 (a∗1 , a∗2 ) Vedere esempio nel discreto su Gibbons pp. 65-67. Contrattazione sequenziale (Gibbons pp.74 - forse) Ipotesi 3 Si ammette la possibilità di mosse simultanee nel corso del gioco (a carte coperte), quindi alcuni dei nodi possono essere non riconoscibili perché alcuni fra i giocatori non sono a conoscenza della mossa di altri. • L’imperfezione dipende dal fatto che durante uno stadio,vi possano essere mosse simultanee da parte di più di un giocatore. Sequenza. 1. I giocatori 1 e 2 scelgono simultaneamente le loro azioni a1 ∈ A1 e a2 ∈ A2 2. I giocatori 3 e 4 osservano l’esito della prima fase (a1 , a2 ) e poi scelgono simultaneamente le loro azioni a3 ∈ A3 e a4 ∈ A4 3. I payoffs sono ui (a1 , a2 , a3 , a4 ) ∀i = 1, ...4. Soluzione a ritroso G3 : max u3 (a1 , a2 , a3 , a4 ) a3 ∂u3 (a1 , a2 , a3 , a4 ) =0 =⇒ a∗3 = R3 (a1 , a2 ) ∂a3 max u4 (a1 , a2 , a3 , a4 ) G4 : a4 ∂u4 (a1 , a2 , a3 , a4 ) =0 =⇒ a∗4 = R4 (a1 , a2 ) ∂a4 Calcolo la soluzione simultanea delle 2 funzioni di reazione. o no? quindi max u1 (a1 , a2 , R3 (a1 , a2 ) , R4 (a1 , a2 )) G1 : a1 ∂u1 (a1 , a2 , R3 (a1 , a2 ) , R4 (a1 , a2 )) =0 =⇒ a∗1 = R1 (a2 ) ∂a1 max u2 (a1 , a2 , R3 (a1 , a2 ) , R4 (a1 , a2 )) G2 : a2 ∂u1 (a1 , a2 , R3 (a1 , a2 ) , R4 (a1 , a2 )) =0 =⇒ a∗2 = R2 (a1 ) ∂a2 Calcolo la soluzione simultanea del sistema in due equazioni e due incognite e trovo a∗1 e a∗2 Queste ultme due potrebbero anche essere sequenziali. Ad ogni stadio possiamo risolvere Cournot (simultaneo) o Stackleberg (sequenziale) fino ad arrivare al nodo inziale e poi risostituire le soluzioni nelle funzioni di reazione e trovo le soluzioni nei soli parametri. Definizione 15 Equilibrio perfetto nei sottogiochi è quello individuato come unico equilibrio di Nash del gioco a mosse simultanee ogni qualvolta le mosse non siano osservabili max ui (a1 , a2 , R3∗ (a1 , a2 ) , R4∗ (a1 , a2 )), ai per 1 = 1, 2 dove la soluzione d’equilibrio è ui (a∗1 , a∗2 , R3∗ (a∗1 , a∗2 ) , R4∗ (a∗1 , a∗2 )), 8 per 1 = 1, 2 osservazione 2 L’esito "perfetto nei sottogiochi del gioco a 2 stadi" è il diretto analogo del BWI per i giochi con info completa e perfetta Esempio. Equilibrio di Stackleberg o Leadership di quantità1 . 2.2 Giochi dinamici con Informazione Completa e Imperfetta: Definizioni (Gibbons pp. 122-134) Richiamiamo la definizione già data. Definizione 16 Informazione completa e imperfetta. Il giocatore cui spetta la mossa non è a conoscenza della storia del gioco, ovvero non sa in quale nodo si trova. Definizione 17 Un insieme informativo del giocatore i è un insieme di nodi decisionali tali che: (i) il giocatore i ha diritto a muovere; (ii) quando il gioco raggiunge un nodo informativo, il giocatore non sa quale nodo esatto sia stato raggiunto perché non è in grado di distinguere le mosse che conducono a tale insieme informativo a causa di (a) simultaneità delle mosse, (b) informazione non completa. Definizione 18 Rappresentazione in forma estesa del gioco specifica: 1. Il numero dei giocatori che prendono parte al gioco; 2.a. Quando hanno diritto alla mossa: 2.b. quali mosse ad ogni nodo informativo, 2.c. cosa conosce ogni giocatore quando gli spetta la mossa 3. I payoffs ricevuti da ciascuno per ogni nodo finale ovvero in seguito ad ogni combinazione di mosse. Definizione 19 Una "strategia" si specifica un’azione intrapresa dal giocatore i − esimo, per ogni nodo in cui deve giocare. Definizione 20 Un sottogioco di un gioco in forma estesa 1. comincia da un nodo decisionale n che sia un insieme informativo composto da un singolo nodo, ma non deve essere il nodo iniziale altrimenti il sottogioco coincide con il gioco. 2. comprende tutti i nodi decisionali e terminali successivi al nodo iniziale n nell’albero del gioco, 3. non spezza nessun insieme informativo. FIG. 2.18 Gibbons, p. 127 Definizione 21 Selten (1975). Un equilibrio di Nash è "perfetto nei sottogiochi" (ENP) se le strategie formano un equilibrio di Nash in ogni sottogioco. • Differenze fra "backward induction" (Gibbons p. 132) ed ENP perfetto nei sottogiochi BW I EN P : : a∗1 , a∗2 , a∗3 (a∗1 , a∗2 ) , a∗4 (a∗1 , a∗2 ) a∗1 , a∗2 , a∗3 (a1 , a2 ) , a∗4 (a1 , a2 ) (8) ovvero ENP considera l’ottimalità delle funzioni di risposta, non le mosse effettive, quindi può contenere strategie NON CREDIBILI. L’esito BWI elimina le minacce non credibili. Si veda es. p.133. 3 Giochi ripetuti .... SI. pp. 88-113 1 Si veda, fra gli altri, Miceli (2013) Oligopolio con prodotto omogeneo, SSRN http://dx.doi.org/10.2139/ssrn.2244573 9 3.1 Giochi ripetuti un numero finito di volte In questo caso il gioco simultaneo si ripete. Esercizio 1 Qual’è la forma estesa di un un gioco matriciale 2x2 (Es. Dilemma del Prigioniero) giocato per 2 stadi? Esercizio 2 Paragonare i payoffs di un gioco matriciale 2x2 con due periodi t = 0, 1. e la sua versione in forma estsa e risolta via BWI. Definizione 22 Un gioco costituente G(T ) è un gioco ripetuto un ª numero finito T di volte in cui le mosse © siano nella sequenza definita dalla strategia ai = s1i , ..., sti , ..., sTi dove ogni mossa sia parte delle possibili mosse Si , si ∈ Si , e dunque ogni strategia ai ∈ Ai , sia una combinazione delle possibili mosse si . 1. giocatori i = 1, ..., n; 2. uno spazio di mosse per ogni giocatore si ∈ Si , ∀i = 1, ..., n; 3. uno spazio di strategie per ogni giocatore si ∈ Si , ∀i = 1, ..., n; 4. una funzione di utilità o payoff per ogni giocatore è la somma dei payoffs ottenuti in ogni stadio del gioco: ui ∀i = 1, ..., n. Il gioco è indicato con G (T ) = {A1 , ..., An ; u1 , ...un } Proposizione 6 Se G (T ) ha un unico equilibrio di Nash in ogni stadio t = 1, ..., T, allora G (T ) ha un unico equilibrio / esito di Nash perfetto nei sottogiochi: le strategie di Nash sono giocate ad ogni stadio. Banalmente l’equilibrio perfetto di Nash non è che la ripetizione dell’unico equilbrio di Nash definito in ogni sottogioco. 3.2 Giochi ripetuti un numero infinito di volte Definizione 23 Sia δ = 1/(1 + r) il tasso di sconto. Definizione 24 Sia μ = probabilità che il gioco finisca immediatamente. Definizione 25 "Trigger strategy" = strategia del grilletto: il giocatore coopera fino a quando l’altro coopera e non appena l’altro non coopera, egli smetterà di cooperare per sempre. Definizione 26 "Sottogioco" = il gioco giocato nell’intervallo di date [t + 1, T ] =⇒ G (T − t, δ) . • Ci sono vari sottogiochi che cominciano alla data t + 1 tanti quanti sono i rami del gioco a quel momento, detti "storie del gioco". • Se il gioco è giocato fino all’∞, qualunque gioco cominciato in una data finita, sarà eguale al gioco infinito. G {[(t + 1) , ∞] , δ} = G {[0, ∞] , δ} = etc. Definizione 27 (Selten 1965) Un equilibrio di Nash è perfetto nei sottogiochi se le strategie dei giocatori costituiscono un equilibrio di Nash in ogni sottogioco. Esercizio 3 Considerare il gioco matriciale seguente G1\G2 NC1 C1 NC2 5,5 0,20 C2 20,0 10,10 1. Disegnare i payoffs. 2. Considerare t = 0, 1, 2. Disegnare il payoff della Trigger Strategy in valor medio deviando a t = ... 10 3. ... Teorema 1 (Folk Theorem - Friedman (1971)). Sia G un gioco finito, statico e con informazione completa. ¢ ¡ N • Sia πNash = π N 1 , ...π n il vettore degli esiti in cui tutti i giocatori giocano le strategie di Nash: l’equilibrio di Nash. • Sia π = (π1 , ...πn ) il vettore di altri esisti possibili. Se π è un miglioramento paretiano rispetto a πNash , allora esiste un tasso di sconto δ ' 1, tale che l’esito π diventi l’esito di Nash giocato in ogni stadio, ovvero ∃ equilibrio di Nash perfetto nei sottogiochi del gioco ripetuto infinitamente G (∞, δ) , che consente di ottenere il vettore π = (π 1 , ...πn ) come payoff medio. DISEGNO con matrice sopra in Trigger Strategy, Payoff Medio, Payoff Somma, Tit-for-Tat. (Si veda Gibbons (2005) Fig. 2.13-2.14, pp 102-104. 4 Giochi Statici con Informazione Incompleta (Giochi Bayesiani) Cfr. Gibbons cap.3. Parliamo di informazione incompleta quando almeno uno dei giocatori non ha perfetta informazione riguardo al payoff di un altro giocatore. Come modellare questo? Si immagina che il giocatore i sul quale si ha incertezza possa essere di diversi tipi ti ∈ Ti . Ognuno di questi tipi può avere una funzione di payoffs diversa che genererà dunque payoffs diversi, e, nel caso discreto, può avere semplicemente payoffs diversi nelle caselle. Payoffs diversi daranno luogo a strategie dominanti / dominate / Nash / minimax o maximin diverse. Definizione 28 Gioco statico bayesiano in forma normale e con n giocatori G = [A1 , ...An , T1 , ..., Tn ; μ1 , ..., μn ; u1 , ..., un ] dove ogni giocatore i avrà: 1. un insieme di mosse ai ∈ Ai , discrete o continue; 2. un insieme di tipi ti ∈ Ti ; 3. una probabilità di esistere, dapprima una probabilità a priori (che poi viene aggiornata da una probabilità PN a posteriori nei giochi dinamici) μi , where i=1 μi = 1; 4. una funzione di payoff ui o π i , dove Definizione 29 Probabilità a posteriori / Credenza / Belief è la probabilità attribuita dal tipo (i) al fatto che la mossa venga effettuata da un tipo (−i) (non osservabile). μi (t−i |ti ) = μ (ti |t−i ) p (t−i ) μ (ti |t−i ) p (t−i ) = PN μ (ti ) i=1 μ (ti |t−i ) p (t−i ) dove μ (ti |t−i ) è la probabilità attribuita dal tipo (i − esimo) al tipo (−i − esimo), ovvero le probabilità calcolate con il metodo delle strategia miste in ciascun gioco. • (mmm ci rifletteremo calcolando il gioco discreto). Esempio. In Cournot con I1 unica e I2 può essere di due tipi (costi alti o costi bassi), p (t−i ) è il nostro θ dell’esercizio, mentre μ (ti |t−i ) = 1 per la "Miglior Risposta" nel Gioco Continuo, mentre sarà μ (ti |t−i ) = 1 nel gioco discreto, qualora esista la strategia di Nash (Per ora lasciate stare. Fate gli esercizi e poi ne riparliamo). Definizione 30 Nel gioco statico bayesiano G = [A1 , ...An , T1 , ..., Tn ; μ1 , ..., μn ; u1 , ..., un ] una strategia si (nel gioco statico è solo una mossa) del giocatore i è una funzione si (ti ) tale che si (ti ) : ti ∈ Ti −→ ai ∈ Ai 11 Definizione 31 In G il vettore di strategie s∗ = (s∗1 , ...s∗n ) è un Equilibrio di Nash Bayesiano (ENB) se ∀ti ∈ Ti , s∗i (ti ) è tale che X £ ¤ ui ai , s∗−i (t−i ) μ(t−i , ti ) max ai ∈Ai t−i ∈T −i ovvero ai è la miglior risposta. Harsany propose nel 1967-68 di trasformare il gioco ad informazione incompleta in uno a informazione imperfetta ovvero passando da due giochi matriciali a un gioco con i nodi decisionali relativi ai diversi tipi di un giocatore confusi. (vedere figura). 4.1 Gioco Bayesiano con Variabile Continua: Cournot • Impresa 1: unico tipo e con costi k1 • Impresa 2: può essere di due tipi: ,k2H , k2L . con rispettiva probabilità θ, (1 − θ) E’ come se esistessero due giochi/relazioni: 1. un primo gioco fra la I1 e la I2H 2. un secondo gioco fra la I1 e la I2L Ognuno dei due è un banale gioco di Cournot-Nash con costi diversi di cui conosciamo la soluzione • Gioco fra la I1 e la I2H a − 2k2H + k1 ; 3b a − 2k2H + k1 a − 2k1 + k2H −b = (a − bq1 − bq2H ) = a − b 3b 3b a + k1 + k2H = 3 (a − 2k1 + k2H )2 (a − 2k2H + k1 )2 CR ; π ; = = 2H 32 b 32 b CR q1vs2H = p∗H π1 a − 2k1 + k2H ; 3b CR q2H = a − 2k1 + k2L ; 3b CR q2H = • Gioco fra la I1 e la I2L CR q1vs2L p∗H π1 a − 2k2L + k1 ; 3b a − 2k2L + k1 a − 2k1 + k2L −b = (a − bq1 − bq2L ) = a − b 3b 3b a + k1 + k2L = 3 (a − 2k1 + k2L )2 (a − 2k2L + k1 )2 CR ; π ; = = 2H 32 b 32 b = Tuttavia la I1 non sa con chi sta giocando e gioca quindi contro una media ponderata fra le due I2H e la I2L secondo le proprie probabilità soggettive θ e (1 − θ) , ovvero il valore atteso fra le due, mentre ognuno dei due "tipi" per l’impresa 2 ha una funzione di reazione soltanto verso l’impresa 1. max π2,H (q1 , q2H , q2,L ) = (a − bq1 − bq2H − kH ) q2H q2H max π 2,L (q1 , q2H , q2,L ) = (a − bq1 − bq2,L − kL ) q2L qL max π1 (q1 , q2H , q2,L ) = θ (a − bq1 − bq2H − k1 ) q1 + (1 − θ) (a − bq1 − bq2L − k1 ) q1 q1 Ognuno dei due tipi I2 avrà una funzione di reazione soltanto nei confronti di I1 . ∂π2,H =0 ∂q2,H ∗ =⇒ q2H = R2H (q1 ) = 12 1 a − k2H − q1 2b 2 ∂π2,L =0 ∂q2,L ∗ =⇒ q2L = R2l (q1 ) = a − k2L 1 − q1 2b 2 L’impresa I1 avrà una funzione di reazione verso ciascuno dei tipi dell’impresa 2 ponderata per la probabilità di stare incontrando tale tipo. ∂π1 = 0, ∂q1 =⇒ q1 = R∗1 (Eq2 ) = 1 a − k1 1 − θ q2H − (1 − θ) q2L 2b 2 2 • Per la I1 , la somiglianza alla (11) è evidente assumendo che il costo dell’altra sia la media comparata θkH + (1 − θ) kL dei costi. 4.1.1 Grafico delle funzioni di reazione Costruiamo il grafico delle funzioni di reazione per a = 12, b = 1, k1 = 3, k2H = 4, k2L = 2, θ = 1/2. q2H q2L q1 1 a − k2H 12 − 4 1 − q1 = − q1 2b 2 2 2 a − k2L 1 12 − 2 1 − q1 = − q1 = R2l (q1 ) = 2b 2 2 2 1 a − k1 1 ∗ − θ q2H − (1 − θ) q2L = R1 (Eq2 ) = 2b 2 2 12 − 3 1 1 1 1 12 − 3 1 2 − · q2H − · q2L = − q2 = 2 2 2 2 2 2 2 = R2H (q1 ) = osservazione 3 La R1∗ (Eq2 ) va calcolata e poi messa in grafico in funzione di q2 . osservazione 4 Per poter disegnare la R1∗ (Eq2 ) sul piano (q1 , q2 ) bisogna risolverla per q2 in funzione di q1 , si ottiene 12 − 3 1 − q2 =⇒ q2 = 9 − 2q1 q1 = 2 2 q2 10 8 6 4 2 0 0 2 4 6 8 10 q1 Risolvendo il sistema si trovano le coordinate delle intersezioni q1 = = = = 1 a − k1 1 − θ q2,H − (1 − θ) q2,L 2b 2µ 2¶ ¶ µ 1 a − kH 1 a − k1 1 a − kL 1 −θ − q1 − (1 − θ) − q1 2b 2 2b 2 2 2b 2 µ ¶ µ ¶ 1 a − kH a − k1 1 a − kL 1 −θ − (1 − θ) − q1 2b 2 2b 2 2b 4 1 1 (a − 2k1 + θkH + (1 − θ) kL ) − q1 4b 4 13 a − 2k1 + θk2H + (1 − θ) k2L 3b = Eq1∗ CR CR = θq1vs2H + (1 − θ) q1vs2L q1∗ = reinserendo q1∗ in ognuna delle funzioni di reazione q2 si ottiene µ ¶ 1 a − 2k1 + θk2H + (1 − θ) k2L a − k2H − q2H = 2b 2 3b 2 2a 3 θ 1−θ + k1 − k2H − k2H − k2L = 6 b 6b 6b 6b 6b 4 2a 2 1−θ 1−θ − k2H + k1 + k2H − k2L = 6 b 6b 6b 6b 6b ∗ q2H = a − 2k2H + k1 1 − θ + (k2H − k2L ) 3b 6b (9) e analogamente θ a − 2k2L + k1 − (k2H − k2L ) 3b 6b Per referenza riporto la funzione di reazione nel caso di informazione completa ∗ = q2,L qi∗ = a − 2ki + kj 3b (10) (11) osservazione 5 NB!!! Le quantità di Cournot per le I2H e I2L N ON sono come quelle dei singoli giochi di Cournot sopra. Perché ognuna delle I2H e I2L interagisce con la I1 che si sta "sbagliando" su chi è la I2 ovvero si posiziona su una funzione di reazione media, che non è la "miglior risposta" verso rispettivamente la I2H o la I2L . Esse possono quindi avvantaggiarsi dell’errore compiuto dalla I1 . ∗ ∗ > q2∗ (inf o_compl) > q2,H . La ragione è che se l’impresa 1 sapesse che 1. Per le I2 si ha che la quantità q2L I2,H ha costi alti ne approfitterebbe per produrre lei I1 di più, ma siccome la I1 non ne è certa, la I2H ne ∗ indica costi bassi e quindi maggiore efficienza!). approfitta (Attenzione q2L 2. Al contrario, la I2L a causa dell’incertezza, non viene percepita con costi cosi bassi come sono. ∗ diventa quella tradizionale per Cournot con 2 imprese con osservazione 6 Per θ = 1, la soluzione per q2H ∗ costi unitari diversi. Stesso per la q2L per θ = 0. Adesso è necessario calcolare il valore atteso del prezzo di Nash e quindi dei profitti Ep = a − bq1 − bθq2H − b (1 − θ) q2L µ ¶ a − 2k2H + k1 1 − θ a − 2k1 + θk2H + (1 − θ) k2L − bθ + (k2H − k2L ) + = a−b 3b 3b 6 µ ¶ a − 2k2L + k1 θ − (k2H − k2L ) −b (1 − θ) 3b 6 1 = (a + k1 + θk2H + (1 − θ) k2L ) 3 Eπ∗1 (q1 , q2H , q2L ) = (Ep∗ − k1 ) · Eq1∗ µ ¶ 1 a − 2k1 + θk2H + (1 − θ) k2L (a + k1 + θk2H + (1 − θ) k2L ) − k1 = 3 3b = (a − 2k1 + θk2H + (1 − θ) k2L )2 32 b ∗ π ∗2H (q1 , ) = (Ep∗ − k2H ) q2H ∗ π∗2L (q1 , ) = (Ep∗ − k2L ) q2L 14 Esercizio 4 Disegnare le funzioni di reazione sul piano (q1 , (q2H , q2L )) mettendo i due tipi della I2 sullo stesso asse. Esempio. Parametri: a = 12, k1 = 3, k2H = 4, k2L = 2, θ = 0.5 4.2 Collusione con Informazione Imperfetta Date le seguenti funzioni di profitto: π 2,H (q1 , q2H ) = (a − bq1 − bq2H − k2H ) q2H π2,L (q1 , q2,L ) = (a − bq1 − bq2,L − k2L ) q2L π1 (q1 , q2H , q2,L ) = θ (a − bq1 − bq2H − k1 ) q1 + (1 − θ) (a − bq1 − bq2L − k1 ) q1 la funzione di profitto totale è π T OT = π1 (q1 , q2H , q2,L ) + Eπ 2 (q1 , q2H , q2L ) = π1 (q1 , q2H , q2,L ) + [θ · π2,H (q1 , q2H ) + (1 − θ) · (a − bq1 − bq2,L − kL ) q2L ] = [θ (a − bq1 − bq2H − k1 ) q1 + (1 − θ) · (a − bq1 − bq2L − k1 ) q1 ] + + [θ · (a − bq1 − bq2H − k2H ) q2H + (1 − θ) · (a − bq1 − bq2,L − k2L ) q2L ] osservazione 7 La I1 ha il valore atteso nella sola domanda, mentre il termine nella seconda parentesi quadra è il valoreatteso del profitto della I2 . Per calcolare le funzioni di reazione,ogni impresa deriverà il profitto totale secondo la propria quantità sulla quale ha il controllo. max π T OT : q1 ∂π T OT : −θbq1 + θ (a − bq1 − bq2H − k1 ) − (1 − θ) bq1 + (1 − θ) (a − bq1 − bq2L − k1 ) + ∂q1 −θbq2H − (1 − θ) bq2L = 0 = −bq1 + (a − bq1 − k1 ) − θbq2H − (1 − θ) bq2L − θbq2H − (1 − θ) bq2L = 0 da cui 2bq1 = a − k1 − θ2bq2H − (1 − θ) 2bq2L da cui q1 ∂πT OT ∂q2H = R1 (Eq2 ) a − k1 − θq2H − (1 − θ) bq2L = 2b (12) : −θbq1 − θbq2H + θ · (a − bq1 − bq2H − k2H ) = 0 : −bq1 − bq2H + a − bq1 − bq2H − k2H = 0 : −2bq1 + a − k2H − 2bq2H = 0 q2H = a − k2H − q1 2b (13) e analogamente a − k2L − q1 2b Le tre funzioni di reazione (12) , (13) , (14) danno origine alle seguenti quantità congiunte q2L = 15 (14) La quantità di monopolio che la collusione produce sarà Q∗Mon = q1 + θq2H + (1 − θ) q2L a − k2L a − k2H + (1 − θ) = θ 2b 2b Oppure, con altre sostituzioni Q∗Mon = a − k1 2b Ipotesi 4 Decidiamo che a − min [k1 ; θk2H + (1 − θ) k2L ] 2b ma siccome potrebbe essere noioso da calcolare, possiamo anche decidere di scegliere ∙µ ¶ ¸ a − k2L a − k2H a − k1 Q∗Mon = max θ + (1 − θ) ; 2b 2b 2b Q∗Mon = da cui q1∗ = Q∗Mon ; 2 ∗ q2H =θ Q∗Mon ; 2 ∗ q2L = (1 − θ) Q∗Mon 2 da cui p∗ e profitti. Esercizio 5 C’è una perdita di quantità o di profitti in informazione incompleta? 5 Gioco Statico con Informazione Imperfetta (Bayesiano) e Variabile Discreta Considerate il Gioco "Battle of Sexes" in cui G1 sia di un solo tipo, mentre G2 sia di 2 tipi (Sinistra e Destra) con probabilità θ, (1 − θ) . Abbiamo due giochi matriciali: M1 prob θ α 1−α G1\G2_sin C1 F1 β1 C2S 2,1 0,0 (1 − β 1 ) F2S 0,0 1,2 M2 prob (1 − θ) α 1−α G1\G2_des C1 F1 β2 C2D 2,2 0,0 (1 − β 2 ) F2D 0,0 1,1 Calcolare l’Equilibrio Bayesiano,ovvero la "casella media" con i payoffs rispettivi di ogni giocatore. Metodo di calcolo: 1. Calcolare gli equilibri di Nash e, se questo non è unico, le probabilità delle strategie miste di ogni gioco matriciale. 2. Adesso invece vogliamo considerare cosa succede ponderando le matrici del giocatore opposto (se esso ha più tipi). Per ogni tipo, è necessario calcolare il valore atteso di ogni strategia propria, come miglior risposta ad ogni strategia del giocatore opposto collassando i suoi diversi tipi, mediante le probabilità di Bayes. Queste sono calcolate usando come pesi le strategie miste di ogni matrice moltiplicate per la probabilità della matrice. Mi spiego con l’esempio. Nel nostro caso G1 deve decidere cosa fare per ogni mossa di G2, ma G2 può essere di due tipi. Supponiamo che G1 voglia calcolare il suo payoff se vede la partita di calcio U1 (C1 , EC2 ) ovvero quando anche G2 vede anche lei la partita di calcio EU1 (C1 ) = θβ 1 U1 (C1 , C2S) + (1 − θ) β 2 U1 (C1 , C2D) 16 tuttavia i due "pesi" θβ 1 , e (1 − θ) β 2 non sommano a 1. E quindi, per farli diventare "probabilità" è necessario normalizzarli (dividere ciascuna per il totale). Si ottiene quindi etc µ ¶ µ ¶ θβ 1 (1 − θ) β 2 U1 (C1 , EC2 ) = ·2+ ·2 θβ + (1 − θ) β 2 θβ 1 + (1 − θ) β 2 ¶ µ ¶ µ 1 (1 − θ) (1 − β 2 ) θ (1 − β 1 ) ·0+ ·0 U1 (C1 , EF2 ) = θ (1 − β 1 ) + (1 − θ) (1 − β 2 ) θ (1 − β 1 ) + (1 − θ) (1 − β 2 ) µ ¶ µ ¶ θβ 1 (1 − θ) β 2 U1 (F1 , EC2 ) = ·0+ ·0 θβ 1 + (1 − θ) β 2 θβ 1 + (1 − θ) β 2 µ ¶ µ ¶ θ (1 − β 1 ) (1 − θ) (1 − β 2 ) U1 (F1 , EF2 ) = ·1+ ·1 θ (1 − β 1 ) + (1 − θ) (1 − β 2 ) θ (1 − β 1 ) + (1 − θ) (1 − β 2 ) dove le probabilità sono le famose probabilità di Bayes. μ (−i | i) = Cosa succede a G2? μ (i | − i) p (−i) μ (i | − i) p (−i) =P μ (i) −i μ (i | − i) p (−i) G2_sin e G2_des risolvono banalmente come nelle strategie miste, perché incontrano un solo tipo G1. Le probabilità (α, 1 − α) coincidono con le probabilità di Bayes. Vediamo perché: U2S (C2S ) = αU2 (C1, C2S ) + (1 − α) U2 (C1, C2D ) le probabilità già sommano a uno, ma seppure le normalizzassimo avremmo α 1−α U2 (C1, C2S ) + U2 (C1, C2D ) α + (1 − α) α + (1 − α) 1−α α U2 (C1, C2S ) + U2 (C1, C2D ) 1 1 U2S (C2S ) = = In effetti, stiamo collassando le due matrici, dove quindi le probabilità del G2 sono diventate µ ¶ θβ 1 β 1 −→ θβ + (1 − θ) β 2 µ 1 ¶ θ (1 − β 1 ) 1 − β 1 −→ θ (1 − β 1 ) + (1 − θ) (1 − β 2 ) µ ¶ (1 − θ) β 2 β 2 −→ θβ + (1 − θ) β 2 µ 1 ¶ (1 − θ) (1 − β 2 ) 1 − β 2 −→ θ (1 − β 1 ) + (1 − θ) (1 − β 2 ) mentre le {α, (1 − α)} restano le stesse. Qualora non lo fossero, avremmo α1 −→ 1 − α1 −→ α2 −→ 1 − α2 −→ µ ¶ θα1 θα1 + (1 − θ) α2 µ ¶ θ (1 − α1 ) θ (1 − α1 ) + (1 − θ) (1 − α2 ) µ ¶ (1 − θ) α2 θα1 + (1 − θ) α2 µ ¶ (1 − θ) (1 − α2 ) θ (1 − α1 ) + (1 − θ) (1 − α2 ) 3. In questo modo abbiamo calcolato tutte le probabilità di Bayes.Adesso si verifica se, dati questi nuovi payoffs, esiste un unico equilibrio di Bayes. 17 4. Se non è unico si procede alla ricerca delle strategie "miste" su questa nuova matrice, ovvero si calcola il valore atteso di ogni strategia (N.B. non sto più ponderando, perché avevo già ponderato prima i singoli addendi. Ma se si calcola EU1 (C1 ) dall’inizio, usando i payoffs originali, è necessario ponderare con le probabilità di Bayes).: EU1 (C1 ) = U1 (C1 , EC2 ) + U1 (C1 , EF2 ) EU1 (F1 ) = U1 (F1 , EC2 ) + U1 (F1 , EF2 ) e si cerca quali siano le probabilità tali che EU1 (C1 ) ≥ EU1 (F1 ) In questo caso otteniamo ¶ µ ¶ (1 − θ) β 2 θβ 1 ·2+ · 2+ θβ 1 + (1 − θ) β 2 θβ 1 + (1 − θ) β 2 µ ¶ µ ¶ θ (1 − β 1 ) (1 − θ) (1 − β 2 ) + ·0+ ·0 ≥ θ (1 − β 1 ) + (1 − θ) (1 − β 2 ) θ (1 − β 1 ) + (1 − θ) (1 − β 2 ) ¶ µ ¶ µ (1 − θ) β 2 θβ 1 ·0+ · 0+ = θβ 1 + (1 − θ) β 2 θβ 1 + (1 − θ) β 2 µ ¶ µ ¶ θ (1 − β 1 ) (1 − θ) (1 − β 2 ) + ·1+ ·1 θ (1 − β 1 ) + (1 − θ) (1 − β 2 ) θ (1 − β 1 ) + (1 − θ) (1 − β 2 ) µ µ θβ 1 θβ 1 + (1 − θ) β 2 ¶ 2+ µ (1 − θ) β 2 θβ 1 + (1 − θ) β 2 ¶ µ ¶ θ (1 − β 1 ) 1+ θ (1 − β 1 ) + (1 − θ) (1 − β 2 ) µ ¶ (1 − θ) (1 − β 2 ) + 1 θ (1 − β 1 ) + (1 − θ) (1 − β 2 ) 2 ≥ 1 2 ≥ G1 effettuerà C1 , con strategia dominante (si poteva vedere subito). G2S e G2D, prevedendo questo, effettueranno C2 . osservazione 8 Importante. Anche qui, come per il caso continuo, la scelta di G1 nel gioco ponderato, NON è necessariamente la stessa scelta che G1 avrebbe fatto in ognuno dei giochi e pertanto la "miglior risposta" di G1 è ottimizzata verso il valore medio atteso fra G2S, G2, ovvero EG2, e NON è assolutamente una risposta ottima verso la singola G2D o G2S, a meno che non si usino le probabilità {θ, 1 − θ} compatibili. 18
© Copyright 2026 Paperzz