Esercitazioni del corso di Costruzione di Macchine 2 e Progettazione FEM
a cura dell’ ing. Francesco Villa
Elementi finiti solidi
Costruzione di Macchine 2 e Progettazione FEM
Prof. Sergio Baragetti
Dalmine - 05/06/2014
Elemento esaedrico a 8 nodi - lineare
1. DESCRIZIONE DELL’ELEMENTO
2. APPROSSIMAZIONE DEGLI SPOSTAMENTI
3. FUNZIONI DI FORMA [𝑁]
4. LEGAME DEFORMAZIONI – SPOSTAMENTI [𝐵]
5. LEGAME SFORZI - DEFORMAZIONI [𝐷]
6. MATRICE DI RIGIDEZZA DELL’ELEMENTO [𝐾]
7. LEGAME SFORZI – SPOSTAMENTI NODALI [𝐻]
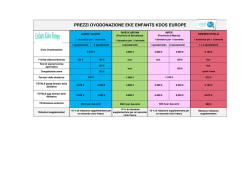
1. Descrizione dell’elemento
𝑧
7
8
6
5
𝑦
𝑐
4
3
𝑏
2
1
𝑎
8 vertici – almeno 8 nodi – EF lineari
𝑥
1. Descrizione dell’elemento
𝑤7
𝑤8
𝑣7
𝑣8
𝑧
𝑤5 𝑣5
7
𝑣6
𝑤6
𝑢5
5
6
𝑢8
8
𝑢6
𝑤4
𝑦
𝑤3
𝑣4
𝑣3
𝑤1
3
𝑣1
1
𝑢7
𝑢1
𝑢3
4
𝑣2
𝑤2
2
𝑢4
𝑢2
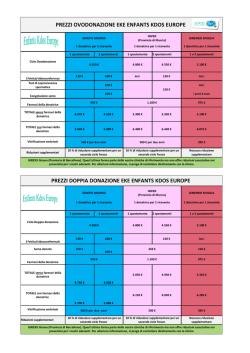
spostamenti nodali: 𝑓𝑖 = 𝑢𝑖 , 𝑣𝑖 , 𝑤𝑖
𝑇
𝑥
1. Descrizione dell’elemento
𝐹𝑧 7
𝑧
𝐹𝑦
𝐹𝑧 5
5
7
6
𝑦
𝐹𝑧 3
𝐹𝑧1
𝐹𝑦 6
𝐹𝑧 6
𝐹𝑥 5
5
1
𝐹𝑥 7
𝐹𝑦 3
3
𝐹𝑦
1
𝐹𝑥 3
𝐹𝑦 8
𝐹𝑧 8
𝐹𝑦 7
𝐹𝑦 2
2
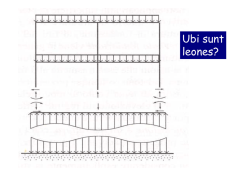
forze nodali: 𝐹𝑖 = 𝐹𝑥 𝑖 , 𝐹𝑦 , 𝐹𝑧 𝑖
𝑖
𝐹𝑥 6
𝐹𝑧 4 𝐹𝑦
4
𝐹𝑧 2
𝐹𝑥 1
8
𝑇
𝐹𝑥 2
𝐹𝑥 8
4
𝐹𝑥 4
𝑥
1. Descrizione dell’elemento
•
VETTORE SPOSTAMENTI E FORZE 24X1 → MATRICE 𝐾
𝐹𝑥,1
𝑢1
24X24
𝑣1
𝐹𝑦,1
𝐹1
𝑓1
𝑤1
𝐹
𝑧,1
𝐹2
𝑓2
𝐹3
𝑓3
𝐹4
𝑓4
𝐹 =
𝑓 =
𝐹5
𝑓5
𝐹6
𝑓6
𝐹7
𝑓7
𝐹8
𝑓8
2. Approssimazione campo spostamenti
•
PER CIASCUN NODO OCCORRE DEFINIRE I TRE SPOSTAMENTI
𝛿𝑖 = 𝑢𝑖 𝑥, 𝑦, 𝑧 , 𝑣𝑖 𝑥, 𝑦, 𝑧 , 𝑤𝑖 𝑢𝑖 𝑥, 𝑦, 𝑧
•
𝑇
APPROSSIMAZIONE DI TIPO POLINOMIALE
𝑢 = 𝛼1 + 𝛼2 𝑥 + 𝛼3 𝑦 + 𝛼4 𝑧 + 𝛼5 𝑥𝑦 + 𝛼6 𝑥𝑧 + 𝛼7 𝑦𝑧 + 𝛼8 𝑥𝑦𝑧
𝑣 = 𝛼9 + 𝛼10 𝑥 + 𝛼11 𝑦 + 𝛼12 𝑧 + 𝛼13 𝑥𝑦 + 𝛼14 𝑥𝑧 + 𝛼15 𝑦𝑧 + 𝛼16 𝑥𝑦𝑧
𝑤 = 𝛼17 + 𝛼18 𝑥 + 𝛼19 𝑦 + 𝛼20 𝑧 + 𝛼21 𝑥𝑦 + 𝛼22 𝑥𝑧 + 𝛼23 𝑦𝑧 + 𝛼24 𝑥𝑦𝑧
•
LINEARE LUNGO RETTE PARALLELE AGLI ASSI x, y, z
•
24 COEFFICIENTI → 24 C.C. → 24 VALORI DI u, v, w NEI NODI
2. Approssimazione campo spostamenti
𝑢 = 𝛼1 + 𝛼2 𝑥 + 𝛼3 𝑦 + 𝛼4 𝑧 + 𝛼5 𝑥𝑦 + 𝛼6 𝑥𝑧 + 𝛼7 𝑦𝑧 + 𝛼8 𝑥𝑦𝑧
𝑣 = 𝛼9 + 𝛼10 𝑥 + 𝛼11 𝑦 + 𝛼12 𝑧 + 𝛼13 𝑥𝑦 + 𝛼14 𝑥𝑧 + 𝛼15 𝑦𝑧 + 𝛼16 𝑥𝑦𝑧
𝑤 = 𝛼17 + 𝛼18 𝑥 + 𝛼19 𝑦 + 𝛼20 𝑧 + 𝛼21 𝑥𝑦 + 𝛼22 𝑥𝑧 + 𝛼23 𝑦𝑧 + 𝛼24 𝑥𝑦𝑧
1.
I TERMINI COSTANTI DESCRIVONO UNA TRASLAZIONE RIGIDA DELL’ELEMENTO, I
TERMINI LINEARI DESCRIVONO ROTAZIONI RIGIDE PER PICCOLI ANGOLI
2.
ESISTENDO SEMPRE LE DERIVATE DEI POLINOMI, È POSSIBILE DESCRIVERE UN
CAMPO DI DEFORMAZIONI
3.
CONGRUENZA VERIFICATA IMPONENDO GLI STESSI SPOSTAMENTI SU BORDI E
FACCE CONTIGUE
4.
FUNZIONI NON SINGOLARI
3. Funzioni di forma
•
ESPRIMONO IL LEGAME FRA IL CAMPO DEGLI SPOSTAMENTI E I
VALORI AI NODI
𝑢 𝑥, 𝑦, 𝑧 = 𝑁1 𝑥, 𝑦, 𝑧
𝑓 =
𝑓1 , 𝑓2 , 𝑓3 , 𝑓4 , 𝑓5 , 𝑓6 , 𝑓7 , 𝑓8
𝑢 𝑥, 𝑦, 𝑧
𝑣 𝑥, 𝑦, 𝑧
𝑤 𝑥, 𝑦, 𝑧
•
𝑓
𝑁1 𝑥, 𝑦, 𝑧
= 𝑁2 𝑥, 𝑦, 𝑧
𝑁3 𝑥, 𝑦, 𝑧
𝑓
SI RICAVANO IMPONENDO I VALORI AI NODI COME C.C.
𝑇
3. Funzioni di forma – N1
•
ESEMPIO PER OTTENERE N1 DALLE COORDINATE NODALI:
𝑃1 0,0,0 , 𝑃2 𝑎, 0,0 , 𝑃3 0, 𝑏, 0 , 𝑃4 𝑎, 𝑏, 0 ,
𝑃5 0,0, 𝑐 , 𝑃6 𝑎, 0, 𝑐 , 𝑃7 0, 𝑏, 𝑐 , 𝑃8 𝑎, 𝑏, 𝑐
•
SOSTITUENDO NELL’APPROSSIMAZIONE POLINOMIALE LE COORDINATE DEI NODI:
𝑢1 = 𝛼1
𝑢2 = 𝛼1 + 𝛼2 𝑎
𝑢3 = 𝛼1 + 𝛼3 𝑏
𝑢4 = ⋯
•
SI OTTENGONO I COEFFICIENTI DEL POLINOMIO
𝛼1 = 𝑢1
𝑢2 − 𝑢1
𝛼2 =
𝑎
𝑢3 − 𝑢1
𝛼3 =
𝑏
𝛼4 = ⋯
3. Funzioni di forma – N1
𝑢 𝑥, 𝑦, 𝑧 = 𝑁1 𝑥, 𝑦, 𝑧
•
𝑓
SI USANO GLI SVILUPPI POLINOMIALI PER [N1], CHE RADUNA I
TERMINI DEL POLINOMIO MOLTIPLICANTI 𝑢1 , 𝑢2 , … , 𝑢8 :
𝑁1 = [𝑁11 , 0,0, 𝑁12 , 0,0, 𝑁13 , 0,0 , 𝑁14 , 0,0,
𝑁15 , 0,0, 𝑁16 , 0,0, 𝑁17 , 0,0, 𝑁18 , 0,0 ]
•
CON:
𝑁11
𝑥 𝑦 𝑧 𝑥𝑦 𝑥𝑧 𝑦𝑧 𝑥𝑦𝑧
=1− − − +
+ +
−
𝑎 𝑏 𝑐 𝑎𝑏 𝑎𝑐 𝑏𝑐 𝑎𝑏𝑐
𝑥 𝑥𝑦 𝑥𝑧 𝑥𝑦𝑧
𝑁12 = −
− +
𝑎 𝑎𝑏 𝑎𝑐 𝑎𝑏𝑐
…
3. Funzioni di forma – N2, N3
LE STESSE ESPRESSIONI VALGONO PER v E w
•
𝑣 𝑥, 𝑦, 𝑧 = 𝑁2 𝑥, 𝑦, 𝑧
𝑤 𝑥, 𝑦, 𝑧 = 𝑁3 𝑥, 𝑦, 𝑧
•
𝑓
𝑓
CON OPPORTUNE PERMUTAZIONI:
𝑁2 = [0, 𝑁11 , 0,0, 𝑁12 , 0,0, 𝑁13 , 0,0 , 𝑁14 , 0,0,
𝑁15 , 0,0, 𝑁16 , 0,0, 𝑁17 , 0,0, 𝑁18 , 0]
𝑁3 = [0,0, 𝑁11 , 0,0, 𝑁12 , 0,0, 𝑁13 , 0,0 , 𝑁14 , 0,0,
𝑁15 , 0,0, 𝑁16 , 0,0, 𝑁17 , 0,0, 𝑁18 ]
3. Funzioni di forma
• SI OTTIENE DUNQUE LA FUNZIONE
𝑢 𝑥, 𝑦, 𝑧
𝑣 𝑥, 𝑦, 𝑧
𝑤 𝑥, 𝑦, 𝑧
𝑁1 𝑥, 𝑦, 𝑧
= 𝑁2 𝑥, 𝑦, 𝑧
𝑁3 𝑥, 𝑦, 𝑧
= 𝑁 𝑥, 𝑦, 𝑧
CON
𝑁 𝑥, 𝑦, 𝑧
𝑓 =
𝑓
DI DIMENSIONE 3X24
4. Legame deformazioni - spostamenti
• DAGLI SPOSTAMENTI SI OTTENGONO LE DEFORMAZIONI
𝑑𝑢 𝑑𝑣
𝑑𝑢
𝛾𝑥𝑦 =
+
𝜀𝑥 =
𝑑𝑦 𝑑𝑥
𝑑𝑥
𝑑𝑣
𝑑𝑢 𝑑𝑤
𝜀𝑦 =
𝛾𝑥𝑧 =
+
𝑑𝑦
𝑑𝑧 𝑑𝑥
𝑑𝑣 𝑑𝑤
𝑑𝑤
𝛾𝑦𝑧 =
+
𝜀𝑧 =
𝑑𝑧 𝑑𝑦
𝑑𝑧
4. Legame deformazioni - spostamenti
•
INTRODUCENDO LE FUNZIONI DI FORMA 𝑁 :
𝑑 𝑁1
𝜀𝑥 =
𝑑𝑥
𝑇
𝑑 𝑁2
𝜀𝑦 =
𝑑𝑦
𝑇
𝑑 𝑁3
𝜀𝑧 =
𝑑𝑧
𝑇
{𝑓}
{𝑓}
{𝑓}
𝑑 𝑁1
𝑑 𝑁2
𝛾𝑥𝑦 =
+
𝑑𝑦
𝑑𝑥
𝑇
𝑑 𝑁1
𝑑 𝑁3
𝛾𝑥𝑧 =
+
𝑑𝑧
𝑑𝑥
𝑇
𝑑 𝑁2
𝑑 𝑁3
𝛾𝑦𝑧 =
+
𝑑𝑧
𝑑𝑦
𝑇
{𝑓}
{𝑓}
{𝑓}
4. Legame deformazioni - spostamenti
• IN FORMA COMPATTA SI DEFINISCE LA MATRICE 6X24 𝐵 :
𝜀 = 𝐵 𝑓
𝐵 = [𝐵1 ], [𝐵2 ], [𝐵3 ], [𝐵4 ], [𝐵5 ], [𝐵6 ]
• LE SINGOLE MATRICI [𝐵𝑖 ] CONTENGONO LE VARIE DERIVATE
DI 𝑁 PER OTTENERE LE DEFORMAZIONI 𝜀𝑥 , 𝜀𝑦 , 𝜀𝑧 , E LE
LORO SOMME PER GLI SCORRIMENTI 𝛾𝑥𝑦 , 𝛾𝑥𝑧 , 𝛾𝑦𝑧
4. Legame deformazioni - spostamenti
• AD ESEMPIO:
𝐵1 =
𝑑 𝑁1 𝑇
𝑑𝑥
= [𝐵11 , 0,0, 𝐵12 , 0,0, 𝐵13 , 0,0 , 𝐵14 , 0,0,
𝐵15 , 0,0, 𝐵16 , 0,0, 𝐵17 , 0,0, 𝐵18 , 0,0 ]
CON
1 𝑦
𝑧
𝑦𝑧
𝐵11 = − +
+ −
𝑎 𝑎𝑏 𝑎𝑐 𝑎𝑏𝑐
1 𝑦
𝑧
𝑦𝑧
𝐵12 = −
− +
𝑎 𝑎𝑏 𝑎𝑐 𝑎𝑏𝑐
…
5. Legame sforzi-deformazioni
•
E’ IL CLASSICO LEGAME COSTITUTIVO ELASTICO, ESPRESSO DALLA
MATRICE 6X6 [D]:
𝐷1
𝐷2
𝐷
𝐷 = 2
0
0
0
𝐷2
𝐷1
𝐷2
0
0
0
1−𝜈
𝐷1 = 𝐸
(1 + 𝜈) 1 − 2𝜈
𝐷2
𝐷2
𝐷1
0
0
0
0
0
0
𝐺
0
0
0
0
0
0
𝐺
0
0
0
0
0
0
𝐺
𝜈
𝐷2 = 𝐸
(1 + 𝜈) 1 − 2𝜈
𝐸
𝐺=
2(1 + 𝜈)
6. Matrice di rigidezza dell’elemento
• DAL PLV:
𝛿 𝑓
𝑇
𝐹 =𝛿 𝑓
𝑇
𝐾 𝑓 =
𝛿 𝜀
𝑇
𝜎 𝑑𝑉
• ESSENDO:
𝛿 𝜀
𝑇
=𝛿 𝑓
𝑇
𝐵
𝑇
𝜎 = 𝐷 𝜀 = 𝐷 𝐵 {𝑓}
• SI OTTIENE:
𝛿 𝑓
𝑇
𝐾 𝑓 =𝛿 𝑓
𝑇
𝐵
𝑇
𝐷 𝐵 𝑑𝑥 𝑑𝑦 𝑑𝑧 {𝑓}
6. Matrice di rigidezza dell’elemento
• SI OTTIENE, SEMPLIFICANDO 𝛿 𝑓
RIGIDEZZA 24X24:
𝐾 =
𝐵
𝑇
𝑇E
𝑓 , LA MATRICE DI
𝐷 𝐵 𝑑𝑥 𝑑𝑦 𝑑𝑧
• PER L’INTEGRAZIONE NUMERICA ESISTONO SVARIATI
ALGORITMI, QUALI L’INTEGRAZIONE SUI NODI DI GAUSS
• SUL SINGOLO ELEMENTO È DUNQUE POSSIBILE ESPRIMERE IL
LEGAME DIRETTO FRA FORZE NODALI E SPOSTAMENTI NODALI:
𝐹 = 𝐾 𝑓
6. Matrice di rigidezza dell’elemento
• RISOLUZIONE DEL MODELLO GLOBALE:
•
•
•
VETTORE
𝐹
CONTENENTE TUTTI I CARICHI NODALI
MATRICE DI RIGIDEZZA GLOBALE 𝐾 , OTTENUTA
ASSEMBLANDO LE 𝐾 DEI SINGOLI ELEMENTI
GLI SPOSTAMENTI DEL MODELLO GLOBALE SI OTTENGONO DA
𝑓 = 𝐾
−1
𝐹
•
L’INVERSIONE DIRETTA DI 𝐾
•
DISPENDIOSA
SI UTILIZZANO DI NORMA ALGORITMI PER LA RISOLUZIONE DEI
SISTEMI LINEARI, QUALI JACOBI E GAUSS-SEIDEL
È ESTREMAMENTE
7. Legame sforzi – spostamenti nodali
• GLI SFORZI POSSONO ESSERE RICOSTRUITI, UNA VOLTA
RISOLTO IL SISTEMA AGLI EF, DA:
𝜎 = 𝐷 𝜀 = 𝐷 𝐵 𝑓 = 𝐻 {𝑓}
• OSSERVAZIONE:
𝑁 , 𝐵 E 𝐻 SONO FUNZIONE DI (x, y, z)
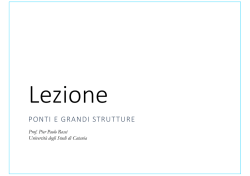
Elemento tetraedrico a 4 nodi - lineare
• DESCRITTO DA 4 NODI:
𝑧
𝑤4
4
𝑣4
𝑢4
𝑤3
𝑦
𝑣3
𝑤1 𝑣1
𝑢3
1
𝑢1
𝑤2
2
3
𝑣2
𝑢2
𝑥
Elemento tetraedrico a 4 nodi - lineare
• APPROSSIMAZIONE POLINOMIALE:
𝑢 = 𝛼1 + 𝛼2 𝑥 + 𝛼3 𝑦 + 𝛼4 𝑧
𝑣 = 𝛼5 + 𝛼6 𝑥 + 𝛼7 𝑦 + 𝛼8 𝑧
𝑤 = 𝛼9 + 𝛼10 𝑥 + 𝛼11 𝑦 + 𝛼12 𝑧
12 COEFFICIENTI → 12 C.C. → 12 VALORI DI u, v, w NEI NODI
𝐾 SARÀ UNA 12X12
Elemento tetraedrico a 4 nodi - lineare
•
LA PROCEDURA È LA MEDESIMA VISTA PER GLI ELEMENTI
ESAEDRICI:
1. DESCRIZIONE DELL’ELEMENTO
2. APPROSSIMAZIONE DEGLI SPOSTAMENTI
3. FUNZIONI DI FORMA [𝑁]
4. LEGAME DEFORMAZIONI – SPOSTAMENTI [𝐵]
5. LEGAME SFORZI - DEFORMAZIONI [𝐷]
6. MATRICE DI RIGIDEZZA DELL’ELEMENTO [𝐾]
7. LEGAME SFORZI – SPOSTAMENTI NODALI [𝐻]
Bibliografia
• LA PROCEDURA È DESCRITTA IN DETTAGLIO IN:
G. BELINGARDI – IL METODO DEGLI ELEMENTI FINITI NELLA
PROGETTAZIONE MECCANICA – LEVROTTO & BELLA
© Copyright 2026 Paperzz