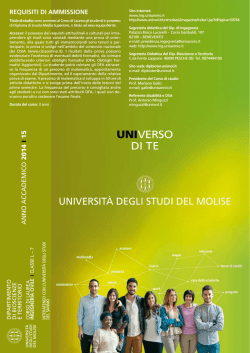
TECNICA DELLE COSTRUZIONI Plasticità Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 1 PLASTICITA’ 1. DEFINIZIONI σ σu La teoria dell’elasticità si riferisce a comportamenti elasto-fragili dei materiali. A LEGAME σ εu - ε LINEARE ε Nei materiali “da costruzione” il legame tensionale σ - ε assume forma sensibilmente differente da quella corrispondente a materiali elasto-fragili (vetro) curve reali σ E’ presente una zona del diagramma in cui le tensioni sono “sensibilmente” costanti al crescere d ll deformazioni. delle d f i i σu schematizzazione di calcolo εu εro Tale comportamento si definisce elasto-plastico ε Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 2 La presenza di comportamento elasto-plastico nel materiale determina una chiara insufficienza della teoria lineare nella valutazione della sicurezza ultima, ultima in particolare di: - azioni indirette - autotensioni - concentrazioni di tensione Occorre quindi tener conto del comportamento reale dei materiali eventualmente tramite una opportuna schematizzazione di calcolo. La corretta conoscenza della sicurezza ultima implica la valutazione del comportamento della struttura fino al carico di collasso, quindi in presenza di non-linearità della risposta (non-linearità meccanica). Si può ad esempio analizzare il comportamento a rottura di una struttura composta da materiale elastofragile ed elasto-plastico. A A l Sez. A-A h b Mi Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 3 a) MATERIALE ELASTO-FRAGILE σ σu σu ql 2 Mi = 12 Diagramma t i l locale tensionale l l ql 2 Mu = 24 εu ε Il collasso si verifica per σmax = σu, pertanto nella sezione di incastro. M ql 2 6 ql 2 σu = = ⋅ = W 12 b ⋅ h 2 2 ⋅ b ⋅ h 2 da cui b) MATERIALE ELASTO-PLASTICO σ σu 2 ⋅ b ⋅ h2 qu = ⋅ σw l2 σu h h σu CARICO DI COLLASSO Il diagramma tensionale si modifica quando si entra in zona non lineare del diagramma σ - ε σu La sezione completamente plasticizzata ha h/2 comportamento di cerniera con attrito. σu σu εu εr ε Se ci fosse una completa tensionale finale diventerebbe p pplasticizzazione ( εr→ ∞ ) il diagramma g birettangolo, con braccio di leva della coppia interna pari ad h/2 Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 4 Nella struttura a collasso: M i = M m ql 2 1 ql 2 Quindi: M i = M m = ⋅ = 8 2 16 Insorge una ridistribuzione rispetto ai momenti elastici Mi Mm b ⋅ h h σ u ⋅ b ⋅ h ql 2 Mu = σ u ⋅ ⋅ = = 2 2 4 16 qu = σ u ⋅ b ⋅ h 2 16 4 ⋅ l2 4⋅ b ⋅ h2 ⋅σ u qu = l2 Il carico di collasso della struttura a materiale elasto-plastico è DOPPIO di quello della struttura a materiale elasto-fragile. In termini di deformazione, ovviamente, il comportamento è molto differente: Mu ⋅ l 2 q ⋅l4 q ⋅l2 l2 - regime elasto-fragile: δ= = ⋅ = 384 ⋅ E ⋅ I 12 32 ⋅ E ⋅ I 32 ⋅ E ⋅ I 2 5 q ⋅ l 4 Mp ⋅ l - regime elasto-plastico: elasto plastico: δ= ⋅ Mp Mp 384 E ⋅ I 8⋅ E ⋅ I q 16 ⋅ M P qu = l2 Ovviamente alla formazione della cerniera di 12⋅⋅ M P 12 q= 2 mezzeria la struttura si trasforma in un l cinematismo e collassa. δel δp Prof. G. Mancini δ Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 5 2. CERNIERA PLASTICA 2.1 ANALISI DI SEZIONE RETTANGOLARE METALLICA σ σsy A Diagramma reale Di l acciaio i i da d costruzione metallica B εi = deformazione di incrudimento εi / εsy ≅ 10 εsy εi ε La risposta del tronco elementare di trave soggetto a flettente può essere così rappresentata: ε l sy σ sy l Alla formazione della cerniera plastica si raggiunge il momento plastico. Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 6 Imponendo le condizioni di equilibrio della sezione (deformazioni indeterminate) risulta: −σ sy W1 N=0 Ω1 dW dΩ ∫ σ dΩ = 0 x Ω dW dΩ W Ω2 Ω = Ω1 + Ω 2 ∫ σ dΩ + ∫ σ dΩ = 0 Ω1 - σ sy ∫ dΩ + σ sy ∫ dΩ = 0 Ω1 Ω2 - Ω1 + Ω 2 = 0 Ω2 Ω1 = Ω 2 +σ sy y L’asse neutro plastico divide la sezione in due aree uguali. L’asse neutro elastico divide la sezione in aree con momenti statici uguali. Ne consegue che, che in generale, generale asse neutro elastico ed asse neutro plastico sono distinti. distinti −σ sy Ω1 Ω2 ( <0 ) M p = ∫ σ y dΩ = - σ sy ∫ y dΩ + σ sy ∫ y dΩ = σ sy ⋅ ( S1 + S2 ) Ω PLASTICO ELASTICO Posto +σ ( >0 ) Ω1 Z = S1 + S2 Ω2 MODULO PLASTICO DELLA SEZIONE Risulta σ sy = M p / Z sy y (σ sy ) Prof. G. Mancini Elasticità: σ el = M el W con W = J y max FIBRE ESTREME ALLO SNERVAMENTO Plasticità: σ sy = M p / Z con TUTTE LE FIBRE ALLO SNERVAMENTO Z = S1 + S2 Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 7 • Si definisce coefficiente di forma il rapporto ϕ = ZW >1 Sezione rettangolare b ⋅ h2 W= 6 b ⋅ h h b ⋅ h2 Z = 2⋅ ⋅ = 2 4 4 Sezione doppio T ϕ = 1,12 1 12 ÷ 1,16 1 16 Sezione circolare ϕ = 1,7 Sezione triangolare ϕ = 2,37 ⇒ ϕ=Z b ⋅ h2 6 = ⋅ = 1,5 W 4 b ⋅ h2 - ϕ elevato → sezione con molte risorse plastiche (poco sfruttata in campo elastico) - ϕ ridotto → sezione con poche risorse plastiche (molto sfruttata in campo elastico) Nel caso si utilizzi materiale con differenti tensioni di snervamento a trazione e compressione σ sy+ ≠ σ sy− dovrà comunque risultare N = 0, quindi l’asse neutro plastico dovrà individuare aree in rapporto inverso a quello delle tensioni. In SEZIONE RETTANGOLARE: Nel CEMENTO ARMATO: + σ σ b σ c+ = 0; σ sy = σ sy− ; ε c = 3,5 ⋅10−3 σ bx + − A s ⋅ σ sy x y σ sy ⋅ b ⋅ y1 = σ sy ⋅ b ⋅ y 2 σ cr ⋅ b ⋅ x = A s ⋅ σ sy ⇒ x = σ cr ⋅ b h + σ sy y1 ⇒ M p = A s ⋅ σ sy ⋅ h − x y 2 = A s σ − σ sy y2 Esistono però legami costitutivi più σ σ As b raffinati per il calcestruzzo. cr sy cr 1 2 sy sy ( ) sy Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 8 2.2 COMPORTAMENTO DI TRAVE ISOSTATICA DURANTE LA PLASTICIZZAZIONE DI UNA ZONA (CIOE (CIOE’ FORMAZIONE DI UNA CERNIERA PLASTICA) P l/2 Nella zona a forte plasticizzazione tutto avviene come se vi fosse concentrata una cerniera che, dotata di attrito: l/2 MOMENTO P1/4 1/r lim. el. CURVATURE zona a forte curvatura - per M < Mp rimane rigida - per M = Mp mantiene il valore del momento plastico e consente la rotazione relativa dei due tronchi di trave trave. tratto “pressoché” rettilineo Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 9 2.3 PRESENZA DEL TAGLIO ASSIEME ALLA FLESSIONE Per le strutture metalliche si considera una condizione di snervamento puntuale in termini di componenti normali e tangenziali di tensione: 2 σ 2 + α 2 ⋅ τ 2 = σ sy α = 2 (TRESCA) oppure α = 3 (VON MISES) La presa in conto del taglio è significativa solo per sezioni con ϕ poco maggiore di 1 (IPE, HE, …) e può essere valutata imponendo che il collasso avvenga per sole σ nelle piattabande e per combinazione di σ e τ nelle anime. Si rileva peraltro che qualora il taglio sia sufficientemente basso da comportare tensioni tangenziali non molto prossime al limite σsy / α, α ll’influenza influenza del taglio sulla valutazione del momento plastico è del tutto trascurabile. Non è ancora stato completamente definito l’effetto del taglio sul momento plastico nel caso delle strutture in cemento armato. armato Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 10 3. CALCOLO DEL CARICO DI COLLASSO IN STRUTTURE IPERSTATICHE q crescente progressivamente fino al collasso Si forma la prima cerniera plastica sull’appoggio centrale e per gli ulteriori incrementi del carico, la struttura è ISOSTATICA. La formazione della successiva cerniera plastica, trasformando la struttura in un meccanismo, comporta il collasso della stessa. • In generale: in una struttura n volte iperstatica occorrono n+1 cerniere plastiche per raggiungere il collasso. Esistono però casi particolari: - COLLASSO PARZIALE 3 2 4 meccanismo! 1 n=6 Attese 7 cerniere plastiche. A collasso con 4 cerniere plastiche per la formazione di un i i i l cinematismo parziale. Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 11 - COLLASSO PIU’ CHE COMPLETO n=1 2a 1 2b l Attese 2 cerniere plastiche. A collasso con 3 cerniere plastiche per la formazione contemporanea delle 2a e 2b (caso teorico). l • In definitiva la presenza della plasticità induce due ordini di benefici: - sulla sezione M p / M el > 1 (ϕ ) - sulla struttura: solo se intervengono ridistribuzioni dei momenti elastici. Esempio: P·l / 8 P Le 3 cerniere pplastiche si formano nello stesso istante, quindi non ci sono ridistribuzioni dei momenti elastici. P·l / 8 • Il principio di sovrapposizione degli effetti NON è applicabile in quanto il sistema non è Hookiano. Non è ddi co conseguenza possibile utilizzare No segue a poss b e ut a e lee linee ee ddi influenza. ue a. Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 12 • Per il calcolo semplificato del carico di collasso si assumono le seguenti ipotesi semplificative: 1. in ogni sezione è possibile raggiungere un momento plastico Mp= σsy·Z che è anche il massimo momento raggiungibile; 2. si suppongono le cerniere plastiche concentrate in una singola sezione anche se, di fatto, sono distribuite su un tratto finito di struttura; 3. il materiale rimane duttile fino al collasso; 4. il momento plastico non è influenzato dalla presenza di N e T e di forze concentrate agenti nella sezione in cui si raggiunge; 5. assenza di fenomeni di instabilità locale e di insieme fino al raggiungimento del carico di collasso; 6. carichi crescenti tutti proporzionalmente; 7. deformazioni “a collasso” ininfluenti sulla geometria delle azioni; 8. connessioni strutturali in grado di trasmettere completamente il momento plastico. L’ipotesii 4 non è in L’i i genere soddisfatta; ddi f occorre disporre di rinforzi i f i locali l li neii profilati fil i perché hé in i generale l lo sia. Ciò vale anche in parte per l’ipotesi 5. Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 13 4. TEOREMI FONDAMENTALI DELL’ANALISI LIMITE TEOREMA STATICO (Greenberg) CINEMATICO (Prager) carico di collasso approssimato per difetto carico di collasso approssimato per eccesso 4.1 RICHIAMO PRINCIPIO DEI LAVORI VIRTUALI Struttura deformabile in equilibrio sotto l’azione di un sistema di forze esterne e sottoposta ad un sistema di spostamenti virtuali (congruenti e compatibili): il lavoro delle forze esterne Le deve eguagliare il lavoro delle sollecitazioni interne Li Le = Li Per una struttura piana composta di travi e caricata nel suo piano risulta: k Le = ∑ Pi ⋅ δi i =1 k = numero di forze Pi δi = componente t secondo d Pi dello d ll spostamento t t del suo punto di applicazione Il lavoro è compiuto dalle caratteristiche di sollecitazione M, N, T, associate agli spostamenti ad esse corrispondenti. corrispondenti Riferendoci al tronco elementare di lunghezza ds ed integrando lungo tutto il sistema, si ottiene: Li = ∫SISTEMA ( N ⋅ Δds + T ⋅ dy + M ⋅ Δdy ) Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 14 Al collasso i può ammettere che le aste siano composte da tronchi rigidi connessi da cerniere plastiche nelle quali si concentra il lavoro interno. interno Ne consegue: k m ∑ P ⋅δ = ∑ M - CARICHI CONCENTRATI i =1 ∫ - CARICHI DISTRIBUITI SIST i i j=1 j ⋅ϑj m = numero di cerniere plastiche m p ⋅ δ ⋅ dx = ∑ M j ⋅ϑ j j=1 Si applica il P. L. V. ad un caso semplice in cui le condizioni di simmetria strutturale e di carico consentono di individuare facilmente la p posizione delle cerniere plastiche. p p 2 p⋅l ϑ ⋅l p ⋅ l ⋅ϑ ⋅ ⋅2 = 2 4 4 Li = Mp ⋅ϑ + Mp ⋅ 2ϑ + Mp ⋅ϑ = 4 ⋅ Mp ⋅ϑ Le = l p·l/2 p·l/2 ·l/4 Le = Li p ⋅ l 2 ⋅ϑ = 4 ⋅ Mp ⋅ϑ 4 p= 16 ⋅ Mp l2 2 Non è però sempre così agevole la determinazione della posizione delle cerniere plastiche! g lavoro interno ppositivo. I termini del lavoro interno sono additivi in qquanto in tutte le cerniere ha luogo L’angolo ϑ, individuante la configurazione ultima, è sufficientemente piccolo da poterlo confondere con la sua tangente. Operando su tronchi rigidi, il lavoro del carico distribuito può essere sostituito con quello del suo risultante. Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 15 4.2 TEOREMA STATICO (1° TEOREMA DELL’ANALISI LIMITE) In un sistema n volte iperstatico indichiamo con λ il moltiplicatore dei carichi (λ=1 esercizio) carichi di Partendo da λ=1 scegliamo ARBITRARIAMENTE una distribuzione di azioni interne che equilibrano le forze esterne (configurazione equilibrata ma non congruente) ed incrementiamo λ fino al valore λ1 per il quale si plasticizza una sezione. λ1 rappresenta il valore limite di λ per la distribuzione assegnata di sollecitazioni. Introduciamo ora uno stato di autensione che scarichi la sezione plasticizzata ed incrementiamo ulteriormente i carichi fino al moltiplicatore λ = λ 2 per il quale si raggiunge una nuova plasticizzazione (λ 2> λ 1). Si introduce un nuovo stato di autensione e si ripete la procedura fino ad introdurre n+1 stati di autotensione e raggiungere il moltiplicatore λ n+1. λ n+1 è il moltiplicatore critico del carico ed il sistema si trasforma in un meccanismo. Potendosi utilizzare differenti successioni di stati di autensione, le corrispondenti differenti successioni λ i non conducono tutte allo stesso valore finale di λ n+1. Sii dimostra di che h il collasso ll reale l corrisponde i d all maggiore i (λ*) dei d i valori l i di λ raggiungibili, i ibili che h cioè, i la l struttura si adatta e sceglie i suoi propri stati di autotensione in modo da sopportare il massimo carico possibile. Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 16 Il collasso reale è contraddistinto da parametri ϑi, δj; il lavoro nelle cerniere plastiche vale: n +1 L = ∑ Mpi ⋅ ϑi * i corrisponde a λ * i =1 1 Se si considera un moltiplicatore λ < λ *, in alcune sezioni non si raggiungerà Mp (Mi < Mp) ed il segno di Mi non sarà concorde a quello della rotazione. Risulta allora: n +1 k Li = ∑ Mpi ⋅ ϑi + ∑M ⋅ ϑ i =1 i = k +1 i corrisponde a λ < λ i * * Ma anche Li può essere espresso come somma di due termini: Poiché Mppi > Mi L > Li * i n +1 k L = ∑ Mpi ⋅ ϑi + * i i =1 ∑ Mp ⋅ ϑ i = k +1 i i Applicando il Principio dei lavori virtuali allo stato limite ultimo si ha: L =λ * i * Li = λ Prof. G. Mancini m ∑P ⋅δ j=1 j j m = numero di forze m ∑P ⋅δ j=1 j j Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 17 E poiché Li > Li risulta: λ * > λ * Il carico limite reale è il maggiore tra quelli che soddisfano l’equilibrio senza violare le condizioni di plasticità. plasticità Il carico limite è il maggiore tra quelli staticamente ammissibili. g di momento,, ottenuto da condizioni di equilibrio q della Staticamente ammissibile è un diagramma struttura, che soddisfi in ogni sezione la condizione M ≤ Mp. Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 18 ESEMPIO P l l P ⋅l 4 ⋅ Mp = Mp ⇒ PL = 4 l P·l/4 P·l/84 P·l·3/8 / P·l/4 Mp/2 P·l/4 P ⋅ l Mp 2 ⋅ Mp = ⇒ PL = 4 2 l Mp Mp = P·l/6 P ⋅ l Mp 6 ⋅ Mp − = Mp ⇒ PL* = 2 4 l IIn corrispondenza i d d l carico del i occorre inviluppare i il il momento t relativo l ti alla ll condizione di i i t ti per isostatica garantire l’equilibrio. Il valore limite PL* di P si raggiunge con due sezioni plasticizzate ed è il massimo tra quelli esaminati. Utile è il riferimento al diagramma di momento elastico. Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 19 4.3 TEOREMA CINEMATICO (2° TEOREMA DELL’ANALISI LIMITE) Plasticizzando un numero sufficiente di sezioni (n+1 cerniere plastiche) una struttura n volte iperstatica può essere trasformata in un meccanismo → meccanismo CINEMATICAMENTE AMMISSIBILE (1 grado di libertà). può allora trovare il carico che lo rende equilibrato, q a mezzo del P.L.V. → carico Si p CINEMATICAMENTE AMMISSIBILE. Il carico limite è il MINORE tra quelli cinematicamente ammissibili, perchè ogni carico ad esso superiore corrisponde ad un meccanismo di collasso differente, ottenibile solo con un RINFORZO della struttura. t tt Il Lemma di Feinber enuncia che se si rinforza un sistema iperstatico (senza introdurre altri indebolimenti, si rinforza almeno una sezione) il carico limite non può diminuire. Il carico limite è il minore tra quelli ottenibili disponendo le cerniere in posizioni arbitrarie e calcolando il carico corrispondente al meccanismo così realizzato. ESEMPIO P l l P 2 2 P 2 l 6 ⋅ Mp P ⋅ϑ ⋅ = Mp ⋅ 2 ⋅ϑ + Mp ⋅ϑ ⇒ PL* = 2 l l 8 ⋅ Mp P ⋅ϑ ⋅ = Mp ⋅ 2 ⋅ϑ + Mp ⋅ 2 ⋅ϑ ⇒ PL = 2 l Prevale il 1° meccanismo che fornisce un valore di PL* coincidente con il precedente. Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 20 4.4 TEOREMA MISTO Se un carico P è cinematicamente e staticamente ammissibile è il vero carico limite. STATICAMENTE P ≤ PL CINEMATICAMENTE P ≥ PL P = PL Si consideri in pratica una struttura per la quale si abbia una distribuzione staticamente ammissibile dei flettenti, tale che sia M = Mp in un numero di sezioni sufficiente alla formazione di un meccanismo in cui ci siano rotazioni nelle cerniere plastiche; se la rotazione in ogni cerniera ha segno concorde a quello d l momento il carico del i considerato id è quello ll di collasso ll ( (ammissibilità i ibili à cinematica). i i ) Al contrario, trovato un meccanismo di collasso si costruisce il diagramma di momento corrispondente; se esso è ammissibile (M ≤ Mp) la soluzione è corretta. Attenzione ai segni: V H l h Errato: 2 Corretto: 1 2 2 M Prof. G. Mancini M Errato 1 Corretto Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 21 ESEMPI DI APPLICAZIONE DEL METODO CINEMATICO individuare un possibile meccanismo di collasso MODALITA’ OPERATIVE determinare il corrispondente carico limite con il P.L.V. verificare che il diagramma di momento ultimo risulti staticamente ammissibile P 2 l/3 ϑ l 3 P.L.V.: P ⋅ϑ ⋅ = Mp ⋅ϑ + Mp ⋅ ⋅ϑ + Mp ⋅ 2 2 3 ⇓ 3l /2 PL = 9 ⋅ Mp l ·l/3 3 Mp 2 2Mp 2 l 2 MOMENTO ISOSTATICO: M = ⋅ P ⋅ = ⋅ P ⋅ l 3 3 9 Mp ⇓ 2 P ⋅l 2 ⋅ Mp = ⋅ P ⋅ l ⇒ Mp = 9 9 Mp STATICAMENTE AMMISSIBILE l ll vero di collasso. ll Il valore di PL è quello Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 22 P 2 P 3 4 P P l P P P P 2 2 h a 1 b c 5 a) b) c) l P ⋅ ⋅ϑ = Mp ⋅ϑ + Mp ⋅ l ⋅ϑ + Mp ⋅ϑ = 4 ⋅ Mp ⋅ϑ 2 P ⋅l 8 ⋅ Mp ⇒ L,a = 8 PL,a = l Mp P ⋅ h ⋅ϑ = Mp ⋅ϑ + Mp ⋅ϑ + Mp ⋅ϑ + Mp ⋅ϑ = 4 ⋅ Mp ⋅ϑ PL,b ⋅ l 4 ⋅ Mp l PL, 4 = = ⋅ ⇒ Lb h Mp h l P ⋅ h ⋅ϑ + P ⋅ ⋅ϑ = Mp ⋅ (ϑ + 2 ⋅ϑ + 2 ⋅ϑ + ϑ ) = 6 ⋅ Mp ⋅ϑ 2 P ⋅l 12 6 ⋅ Mp ⇒ L,c = PL,c = l Mp 1 + 2 ⋅ h h+ l 2 Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 23 PL,i ⋅ l Mp b a c 8 6 a) 4 b) 2 c) 0 0 l <1 h l =1 h l 1< < 4 h l >4 h 1 2 3 meccanismo " b" ⇒ PL = 4 l h PL,a ⋅ l Mp PL,b ⋅ l Mp PL,c ⋅ l Mp =8 = 4⋅ = l h 12 2⋅h 1+ l 4 ⋅ Mp l meccanismo " b" e " c" 6 ⋅ Mp h+ l 2 8 ⋅ Mp meccanismo " a" a ⇒ PL = l meccanismo " c" ⇒ PL = Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 24 VERIFICA DELL’AMMISSIBILITA’ STATICA NEL CASO l/h = 2 ⎛⎜ P = 6 ⋅ Mp ⎞⎟ l ⎠ ⎝ L Occorre tracciare il diagramma di momento del portale. Nelle sezioni 1/3/4/5 è presente una cerniera plastica e quindi il momento il momento plastico. E’ però incognito il momento nella sezione 2, da ricavare con l’ausilio della statica. Si può applicare il P.L.V. al meccanismo di trave della zona 2/3/4. 2 3 4 x 1 2 ⇓ 6 ⋅ Mp l ⋅ =0 l 2 P ⋅l P ⋅ l P ⋅ l P ⋅ l Mp = Mp p+ x ⇒ x = − = = 4 4 6 12 2 M 2 = −3 ⋅ Mp + Mp Mp Mp M 2 ⋅ϑ + Mp ⋅ 2 ⋅ϑ + Mp ⋅ϑ = PL ⋅ϑ ⋅ l Mp 5 STATICAMENTE AMMISSIBILE Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 25 ESEMPI DI APPLICAZIONE DEL METODO STATICO scegliere le incognite iperstatiche tracciare il diagramma di momento della struttura principale M0 MODALITA’ OPERATIVE tracciare il diagramma di momento dovuto alla iperstatiche (incognite) agenti sulla struttura principale M1 sommare i due diagrammi scegliendo il valore delle iperstatiche in modo che risulti: M = |Mp| in un numero di sezioni sufficiente a formare un meccanismo i di collasso ll M ≤ |Mp| in tutte le sezioni disegnare il meccanismo di collasso ipotizzato e controllare che esista concordanza di segno tra momenti plastici e rotazioni reali Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 26 P H P H X·h H·h + X·h l h M0 + M1 X P·l/4 3 2 4 H·h H 2 1 1 5 4 5 P H 1 3 M1 M0 2 Al collasso il portale si trasforma in un n meccanismo con due sole cerniere plastiche. Sono ppossibili due sole condizioni di intervento delle cerniere plastiche da quanto emerge dal diagramma M0+M1. X·h P H 3 4 5 Traversa con modulo plastico maggiore dei montanti (cerniere ad estremo montante) Prof. G. Mancini 4 2 3 1 5 Traversa e montanti con lo stesso modulo plastico. Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 27 Nei due casi occorre modificare M1 in modo che sovrapponendolo ad M0 le due cerniere si formino nelle posizioni volute. volute Mp H·h P·l/4 Mp=H·h/2 M0 Mfinale M(x) Quando il numero delle incognite iperstatiche aumenta non è possibile procedere con metodi manuali. manuali Operando sulla struttura principale ed evidenziate le n incognite iperstatiche risulta: n M = M0 ⋅ λ + ∑ M j ⋅ X j j =1 E, con il teorema statico, in ogni sezione deve risultare: n - Mp ≤ M 0 ⋅ λ + ∑ M j ⋅ X j ≤ Mp j =1 Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 28 In genere occorre indagare solo le sezioni in cui (carichi concentrati ed elementi rettilinei) risulti: - presenza di carico concentrato - appartenenza ad un nodo strutturale - discontinuità del valore dei momenti limite Per una di tali sezioni (sezione i-esima) è quindi: n M i = M 0i ⋅ λ + ∑ M ijj ⋅ X j j =1 Dove Mij è il momento nella sezione i-esima per effetto di Xj. p del vero carico di collasso λ* coincide con il massimo che la funzione lineare Il moltiplicatore z=λ può assumere nel rispetto della disuguaglianza n - Mp ≤ M 0i ⋅ λ + ∑ M ij ⋅ X j ≤ Mp j =1 Si ricade quindi in un problema di programmazione lineare che comporta l’ottimizzazione della funzione li lineare z = λ con zn vincoli i li imposti i i dalla d ll disuguaglianza. di li Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 29 ESEMPIO 15 t 15 t 15 15 X M1 3m 3m Si determina il Max di λ nel rispetto di: B 2 1,5 A 1 x [t·m] 0,5 0 -100 -50 -0,5 0 50 C 100 -1 -1,5 E ⎧- 60 ≤ 45 ⋅ λ - x ≤ +60 3 ⎪ ⎪ ⎨- 60 ≤ 45 ⋅ λ - 2 ⋅ x 3 ≤ +60 ⎪ ⎪- 60 ≤ - x ≤ +60 ⎩ Le disuguaglianze descrivono il dominio ABCDEF nel piano λ, x. l 2,5 F M3 3m ⎧M1 = 45 ⋅ λ - x 3 ⎪ ⎪ ⎨M 2 = 45 ⋅ λ - 2 ⋅ x 3 ⎪ ⎪M 3 = - x ⎩ z = l = 1,78 M2 Il massimo di λ (λ per il vertice B. si ottiene quando la retta z = λ passa Quindi la soluzione ottimale corrisponde ai valori delle variabili: λ =λ D *) *= 1,78 x = 60 t·m -2 2 Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 30 Pertanto risulta: ⎧M1 = 45 ⋅ λ - x = 45 ⋅1,78 − 60 = 60 t ⋅ m 3 3 ⎪ ⎪ 1 78 − 2 ⋅ 60 = 40 t ⋅ m ⎨M 2 = 45 ⋅ λ - 2 ⋅ x 3 = 45 ⋅1,78 3 ⎪ ⎪M 3 = - x = − 60 t ⋅ m ⎩ Meccanismo i plastico l i di collasso ll Prof. G. Mancini Politecnico di Torino - Dipartimento di Ingegneria Strutturale, Edile e Geotecnica Corso di “Tecnica delle Costruzioni” 31
© Copyright 2026 Paperzz