Forme funzionali in microeconomia
Giulio Palomba
Lezioni per il Dottorato di Ricerca in Economia Politica
Universit`a Politecnica delle Marche
Dipartimento di Scienze Economiche e Sociali (DISES)
Febbraio 2014
Indice
Introduzione
2
1 La tecnologia
1.1 Definizioni di base . . . . . . . . . . . . . . .
1.1.1 Input ed output . . . . . . . . . . . .
1.1.2 Insieme delle possibilit`
a di produzione
1.1.3 Funzione di produzione . . . . . . . .
1.1.4 Insieme degli input necessari . . . . .
1.1.5 Isoquanto di produzione . . . . . . . .
1.2 Assiomi . . . . . . . . . . . . . . . . . . . . .
1.3 Elasticit`
a di sostituzione . . . . . . . . . . . .
1.3.1 Elasticit`
a di sostituzione ordinaria . .
1.3.2 Elasticit`
a parziale di sostituzione . . .
1.4 Rendimenti di scala . . . . . . . . . . . . . .
1.5 Omogeneit`
a . . . . . . . . . . . . . . . . . . .
1.6 Omoteticit`
a . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2
3
3
3
3
4
4
5
7
7
8
10
11
12
2 Scelte ottime dell’impresa
2.1 Funzione di costo . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Minimizzazione dei costi . . . . . . . . . . . . . . . . . . . .
2.2.1 Costi marginali e costi medi . . . . . . . . . . . . . .
2.2.2 Lemma di Shephard . . . . . . . . . . . . . . . . . .
2.2.3 Equilibrio dell’impresa rispetto alla produzione . . .
2.2.4 Equilibrio dell’impresa rispetto ai fattori produttivi
2.2.5 Funzione di profitto . . . . . . . . . . . . . . . . . .
2.3 Dualit`
a . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
14
14
17
17
19
20
22
24
25
3 Forme funzionali
3.1 Forme funzionali rigide . . . . .
3.1.1 Cobb-Douglas . . . . . .
3.1.2 Elasticit`
a di sostituzione
3.2 Forme funzionali flessibili . . .
3.2.1 CES a pi`
u stadi (cenni)
3.2.2 Translogaritmica . . . .
3.2.3 Diewert . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
25
26
26
29
33
34
35
38
. . . . .
. . . . .
costante
. . . . .
. . . . .
. . . . .
. . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . .
. . . .
(CES)
. . . .
. . . .
. . . .
. . . .
Appendice: alcuni risultati utili
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
40
1
Introduzione
In microeconomia le forme funzionali vengono spesso utilizzate per descrivere dal punto di vista analitico l’attivit`a di produzione effettuata da una generica impresa; il loro largo impiego in letteratura, sia
dal punto di vista teorico, sia dal punto di vista applicato, `e dovuto al fatto che esse costituiscono un
adeguato strumento analitico per analizzare la relazione esistente tra le combinazioni di fattori produttivi (ad esempio, lavoro, capitale, materie prime) impiegati nei processi di produzione ed i livelli
di produzione realizzati. In termini pi`
u specifici, esse vengono utilizzate per descrivere sia le funzioni
di produzione, sia le funzioni di costo.
Questo lavoro si pone perci`
o l’obiettivo di definire le principali funzioni e di mostrare le loro
caratteristiche pi`
u importanti riguardo agli aspetti matematici ed economici.
Le pagine che seguono sono composte di tre sezioni. La sezione 1 introduce il concetto di tecnologia
utilizzato in microeconomia con particolare enfasi sui concetti matematici che sono alla base della
sua definizione. In quast’ambito perci`
o vengono introdotti gli importanti concetti di funzione di
produzione, Saggio Marginale di Sostituzione Tecnica (SMST) e di elasticit`a di sostituzione. La
sezione 2 si occupa invece dei meccanismi di ottimizzazione necessari per raggiungere l’obiettivo di
massimo profitto; in questo contesto vengono perci`o introdotte le funzioni di costo per l’impresa. Le
forme funzionali costituiscono l’oggetto della sezione 3 all’interno della quale si effettua la distinzione
tra forme rigide e flessibili. Un’appendice contenente alcuni risultati utilizzati nelle dimostrazioni
contenute nelle diverse sezioni chiude il lavoro.
La comprensione del testo non prescinde dalla conoscenza dei concetti base della microeconomia,
della matematica a pi`
u dimensioni, nonch´e di algebra delle matrici; per quanto riguarda questi ultimi, alcune nozioni utili sono contenute all’interno di un’Appendice tecnica che chiude questo lavoro.
Infine, dal punto di vista della notazione, tutte le matrici (quindi anche i vettori) saranno evidenziati attraverso la scrittura in grassetto per distinguerle dai numeri scalari per il quale `e utilizzato il
normale standard matematico (corsivo).
1
La tecnologia
Nella teoria economica la quantit`
a di bene e/o servizio offerta da un’impresa (Qs ) `e generalmente
rappresentata attraverso la funzione
Qs = Qs (p, w, T ∗ , N ),
(1)
dove, oltre alla variabile endogena data prezzo di vendita del prodotto (p), entrano in gioco le seguenti
variabili esogene:
- il costo dei fattori produttivi, definito dal vettore w, in quanto un aumento del prezzo dei fattori
dovrebbe avere un impatto negativo sulla produzione;
- lo stato della tecnologia, indicata con T ∗ poich´e un miglioramento tecnologico dovrebbe produrre
effetti positivi sull’offerta;
- il numero di imprese che producono il bene scambiato nel mercato, indicato con N infatti,
all’aumentare del numero di imprese presenti sul mercato, la quantit`a offerta aumenta.
In questo contesto l’impresa `e vista sostanzialmente come un contenitore (o “scatola nera”) nel
quale sono immessi i fattori produttivi e da cui escono i prodotti finiti. La tecnologia si configura perci`
o
come un mero processo di trasformazione degli input in output ed `e perci`o assunta come data/esogena;
dal punto di vista analitico la tecnologia `e rappresentata attraverso opportune forme funzionali che
saranno introdotte nelle pagine successive.
2
1.1
1.1.1
Definizioni di base
Input ed output
In un dato periodo di tempo l’impresa produce una quantit`a di output, o prodotto finito, indicata
dallo scalare y; per ipotesi si considerano solo imprese monoprodotto. L’impresa impiega all’interno
del processo di produzione un insieme di input, o fattori produttivi, che vengono indicati attraverso
le n componenti del vettore x. Gli input costituiscono i flussi in ingresso nel processo di produzione,
in quanto vengono misurati in ore di utilizzo all’interno di in un certo periodo di tempo.
Per definizione, y e tutte le componenti di x devono avere valori positivi, quindi risulta:
x ∈ Rn+ .
y ∈ R+
(2)
Tutte le coppie (x, y) teoricamente possibili costituiscono l’insieme dei piani di produzione, quindi
dalla (2) segue immediatamente che (x, y) ∈ Rn+1
+ .
1.1.2
Insieme delle possibilit`
a di produzione
L’insieme dei piani di produzione pu`
o essere vincolato dalla natura della tecnologia, dalle caratteristiche e dalla disponibilit`
a dei fattori, da restrizioni istituzionali fino a comprendere tutte quelle combinazioni input-output effettivamente realizzabili: si definisce pertanto come insieme delle possibilit`
a
n+1
di produzione il sottoinsieme in R+ , ovvero a lista di output ed input
Y = {(x, y) ∈ Rn+1
+ |y ≤ f (x)},
(3)
dove f (x) rappresenta la funzione di produzione.
1.1.3
Funzione di produzione
La funzione di produzione f (x) `e trasformazione del tipo
f (x) : Rn+ −→ R+ .
(4)
Il vincolo nella (3) stabilisce l’appartenenza all’insieme Y di tutte quelle combinazioni per le quali la
quantit`a di output prodotto non pu`
o superare quella stabilita dalla funzione di produzione per una
data quantit`a di fattori produttivi. In questo senso la funzione di produzione costituisce l’insieme dei
punti di frontiera oppure, in altri termini
f (x) = {y `e il massimo output ottenibile associato a (x, y) ∈ Y }.
(5)
Ovviamente, la trasformazione degli input in output deve essere tecnicamente possibile.1
Diewert (1982) introduce le propriet`
a della funzione di produzione:
1. la funzione f (x) deve essere continua nello spazio R+ quindi, per il teorema di Weierstrass,
ammette almeno un punto di massimo o di minimo relativo;
2. La funzione di produzione `e monot`
ona crescente; presi due generici vettori x1 e x2 deve risultare
che
se x1 > x2 ⇒ f (x1 ) > f (x2 );
3. produttivit`
a marginale rispetto all’input i-esimo `e
fi =
∂f (x)
≥0
∂xi
(6)
per ∀ i;
1
Se si pongono delle restrizioni sull’insieme delle possibilit`
a produttive, in particolare se si suppone che alcuni input
siano disponibili in quantit`
a fissa, si ottiene l’insieme delle possibilit`
a produttive di breve periodo.
3
4. concavit`a
fii =
∂ 2 f (x)
≤0
∂x2i
(7)
per ∀ i;
5. legge della produttivit`
a marginale decrescente
lim fi = 0;
(8)
0 ≤ lim εy,xi ≤ 1,
(9)
xi →∞
6. analogamente risulta
xi →∞
dove εy,xi `e l’elasticit`
a dell’output rispetto all’i-esimo input
εy,xi
∂y
∂y xi
∂ ln y
y
=
=
.
=
∂xi
∂xi y
∂ ln xi
xi
(10)
Dimostrazione:
L’elasticit`
a dell’output rispetto all’input i-esimo pu`
o essere scritta come segue
fi
εy,xi = ¯ ,
fi
` perci`
dove f¯i `e la produttivit`
a media rispetto all’input i-esimo. E
o ovvio che, per un utilizzo del fattore xi → ∞,
¯
risulti fi ≤ fi , quindi 0 ≤ limxi →∞ εy,xi ≤ 1. Questo risultato sfrutta la relazione neoclassica in base alla quale
la curva della produttivit`
a marginale interseca quella della produttivit`
a media in corrispondenza del punto di
massimo.
——————————
1.1.4
Insieme degli input necessari
Analogamente `e possibile definire l’insieme degli input necessari, cio`e una lista di fattori produttivi
necessari per produrre una almeno certa quantit`a di output (tutte le possibili combinazioni degli input
che sono in grado di generare y). Per essere tecnologicamente fattibile, occorre che (x, y) ∈ Y . Esso `e
pertanto definito da
V (y) = {x ∈ Rn+ |(x, y) ∈ Y }.
(11)
All’interno di questa equazione sono considerate tutte le combinazioni di input che devono essere
possibili, ma possono essere efficienti oppure inefficienti.2
1.1.5
Isoquanto di produzione
L’insieme di tutte le combinazioni efficienti prende il nome di isoquanto di produzione ed `e dato dalla
seguente espressione:
/ V (y ∗ ) per ∀y ∗ > y}.
Q(y) = {x ∈ Rn+ |x ∈ V (y), x ∈
(12)
In pratica, l’isoquanto `e una lista di variabili che permette di produrre precisamente la quantit`
a
y. Gli insiemi Y e V (y) riassumono da due diversi punti di vista tra loro strettamente connessi la
struttura della tecnologia.
2
Una combinazione di input `e detta tecnologicamente efficiente se l’output prodotto corrisponde a quello massimo
ottenibile attraverso il suo utilizzo. In simboli si ha una tecnologia efficiente se:
@y ∗ ∈ Y |y ∗ > y
4
1.2
Assiomi
Per poter rendere compatibili gli insiemi finora definiti alle esigenze della teoria economica sono stati
introdotti i seguenti assiomi di comportamento:
1. l’insieme delle possibilit`
a di produzione non pu`o essere vuoto (Y = ∅) in quanto deve sempre
esistere una tecnologia che permette la produzione di qualsiasi livello di output;
2. L’insieme Y `e chiuso, infatti i punti per i quali y = f (x) fanno parte dell’insieme stesso;
3. Quantit`a positive di output scaturiscono solo dall’impiego di quantit`a positive di input, in simboli
y>0
⇐⇒
∃i ∈ [1, n] | xi > 0
Anche per l’insieme degli input necessari V (y) esistono alcuni assiomi che vanno ad integrarsi con
quelli di cui sopra. In particolare risulta che
1. L’insieme V (y) `e regolare3 cio`e risulta essere non vuoto, chiuso e contiene x = 0 per ∀ y ≥ 0;
2. L’insieme V (y) `e monot`
ono cio`e se da un vettore x `e possibile ricavare la quantit`a di output y,
la stessa quantit`
a `e ottenibile anche per qualsiasi vettore x∗ ≥ x. In formule si ha:
se x ∈ V (y) ⇒ x∗ ∈ V (y) per x∗ ≥ x
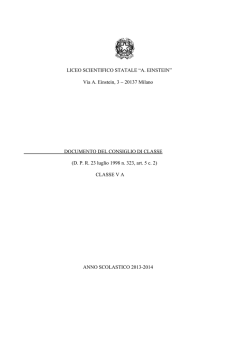
Graficamente tale concetto `e evidenziato in Figura 1 per il caso in cui nel processo di produzione
entrano due soli input; considerando un generico punto P incluso in V (y) deve risultare che tutti
i punti appartenenti allo stesso insieme devono trovarsi nel semipiano a destra dell’isoquanto.
Ci`o implica un’inclinazione non positiva dell’isoquanto.
Figura 1: Monot`onicit`a di V (y)
x2
P
x1
3. L’insieme V (y) `e convesso, quindi i saggi marginali di sostituzione4 sono non crescenti.5 Considerando due vettori x1 , x2 ∈ V (y) contenenti gli input, la convessit`a dell’insieme `e garantita dal fatto che qualsiasi loro combinazione lineare fa parte dell’insieme degli input necessari.
Analiticamente risulta perci`
o
se x1 , x2 ∈ V (y) ⇒ x
¯ = θx1 + (1 − θ)x2 ∈ V (y) per ∀ θ ∈ [0, 1].
3
Varian (1992) identifica tale assioma col nome di “tecnologia regolare”.
Il saggio marginale di sostituzione, o SMST, `e definito nella sezione 1.3.1.
5
Questa propriet`
a deriva dalla monot`
onicit`
a di V (y). Nel caso in cui tale insieme sia strettamente convesso, i saggi
marginali di sostituzione sono sempre negativi.
4
5
La convessit`
a dell’insieme degli input necessari `e implicata dal fatto che anche l’insieme delle
possibilit`a di produzione `e convesso, infatti, presi due vettori x2 > x1 in grado di poter produrre
la quantit`
a di output y, risulta
se (x1 , y), (x2 , y) ∈ Y ⇒ (¯
x, y) ∈ Y,
dove x
¯ `e una qualsiasi combinazione lineare dei vettori degli input considerati;
4. la convessit`
a dell’insieme V (y) implica che la funzione di produzione sia quasi concava (Cardani,
1988).
Dimostrazione:
La rappresentazione di cui alla (5) implica che
V (y) = {x|y ≤ f (x)}
che coincide con la definizione formale di quasi concavit`
a della funzione di produzione.
——————————
Esempio 1 La Figura 2 illustra tutti i concetti esposti finora rappresentando 3 tecniche di produzione alternative che utilizzano n = 2 input per produrre la quantit`
a di output y = 1: la tecnica 1, la tecnica 2 e la tecnica 3 per le quali l’insieme delle possibilit`
a produttive `e dato da Y =
{(1, x1,1 , x2,1 ), (1, x1,2 , x2,2 ), (1, x1,3 , x2,3 )}, mentre l’insieme degli input necessari `e
x1,1
x1,2
x1,3
V (1) = {x1 , x2 , x3 } =
,
,
x2,1
x2,2
x2,3
Generalizzando per un livello di produzione y = y0 si ottiene
V (y0 ) = {φy0 x1 , (1 − φ)ψy0 x2 , (1 − ψ)y0 x3 }
1 2
1 2
, . . . , 1 e ψ = 0, , . . . , 1 sono i parametri che combinano linearmente le tecniche
y0 y0
y0 y0
nei punti che costituiscono i segmenti AB e BC. La spezzata in grassetto indica perci`
o l’isoquanto di
produzione per un livello di produzione y = y0 .
dove φ = 0,
Figura 2: Tecnologia, isoquanto di produzione
x2
tecnica 1
tecnica 2
A
D
B
tecnica 3
C
x1
Il punto D non `e raggiungible con nessuna tecnica e neppure attraverso una combinazione di
tecniche, quindi xD ∈
/ V (y0 ).
6
1.3
Elasticit`
a di sostituzione
L’elasticit`a di sostituzione `e un indicatore sintetico utilizzato in Economia per misurare il grado
di sostituibilit`a diversi input all’interno di un processo produttivo. In letteratura esistono due tipi
diversi di elasticit`
a di sostituzione a seconda del numero di input che entrano nella sua determinazione.
All’interno di questo paragrafo sono enunciati ed analizzati entrambi.
1.3.1
Elasticit`
a di sostituzione ordinaria
L’elasticit`a di sostituzione ordinaria `e calcolata tra due input del processo produttivo indipendentemente dalla presenza di altri input. Dati due generici fattori produttivi xi e xj con i 6= j contenuti
all’interno del vettore x, l’elasticit`
a di sostituzione ordinaria6 `e definita come il rapporto tra la variazione percentuale del rapporto tra le loro quantit`a e la variazione percentuale del saggio marginale di
sostituzione tecnica (SMST), cio`e
∂(xj /xi )
∂ log(xj /xi )
∂(xj /xi )
SMST(xi , xj )
xj /xi
=
σ=
=
∂ SMST(xi , xj )
∂ SMST(xi , xj )
xj /xi
∂ log |SMST(xi , xj )|
SMST(xi , xj )
(13)
dove il SMST relativo agli input considerati definisce la pendenza dell’isoquanto. Nell’ultima versione
della (13) il SMST `e in valore assoluto perch´e costituisce l’argomento della funzione logaritmo (condizione di esistenza). Si tenga presente che, quando xi = L (input lavoro) ed xj = (input capitale), il
rapporto xj /xi = K/L `e detto intensit`
a di capitale.
L’equazione che definisce il SMST `e
SMST(xi , xj ) =
dxj
,
dxi
(14)
quindi esso si configura inoltre come il rapporto tra la produttivit`a marginale dei due input considerati,
infatti risulta
∂f (x) ∂f (x)
SMST(xi , xj ) = −
.
(15)
∂xi
∂xj
Dimostrazione:
Data una generica funzione di produzione y = f (x), supponendo che i fattori produttivi subiscano una variazione
infinitesima nelle loro quantit`
a, si ottiene:
dy =
∂f (x)
∂f (x)
dxi +
dxj
∂xi
∂xj
Poich´e tale variazione non modifica la quantit`
a prodotta, deve valere dy = 0, quindi
∂f (x)
∂f (x)
dxi +
dxj = 0,
∂xi
∂xj
dalla (14) risulta perci`
o
SMST(xi , xj ) = −
∂f (x)
∂xi
∂f (x)
fi (x)
=−
.
∂xj
fj (x)
——————————
Mentre il SMST si configura come la pendenza dell’isoquanto, l’elasticit`a di sostituzione rappresenta la curvatura dello stesso (Varian, 1992), quindi l’equazione (13) mostra come il rapporto nelle
quantit`a di input utilizzate all’interno del processo di produzione subisca variazioni quando il SMST
varia. L’elasticita di sostituzione assume valori positivi, cio`e σ ∈ [0, +∞): quanto maggiore `e l’elasticit`a di sostituzione, tanto maggiore `e la possibilit`a di sostituire l’uno con l’altro gli input. Nel
dettaglio:
6
D’ora in avanti questo concetto sar`
a denominato semplicemente “elasticit`
a di sostituzione”.
7
- se σ = 0 ⇒ input perfetti complementi, quindi non `e possibile sostituire il minore impiego
di uno con il maggiore impiego dell’altro e viceversa. Questo `e il caso dei processi produttivi a
proporzioni fisse;
- se 0 < σ < 1 ⇒ input complementari;
- se σ > 1 ⇒ input sostituti;
- se σ → ∞ ⇒ input perfetti sostituti, si pu`o ottenere lo stesso livello di produzione diminuendo la quantit`
a utilizzata di uno e incrementando in maniera proporzionale la quantit`a l’altro:
l’isoquanto di produzione `e perci`
o una retta.
1.3.2
Elasticit`
a parziale di sostituzione
Quando la dimensione del vettore x `e n > 2 l’elasticit`a di sostituzione tra due generici input non `e
la stessa che si ottiene attraverso l’equazione (13), in quanto la presenza di altri fattori produttivi
influisce nel suo valore. In questo caso si parla di elasticit`a parziale di sostituzione, introdotta da
Allen (1938) e nota perci`
o anche come elasticit`a di sostituzione di Allen-Uzawa.
Dati due generici input xi e xj (i 6= j) l’elasticit`a parziale di sostituzione `e definita dalla seguente
espressione:
γij 0
σij =
f x,
(16)
xi xj
dove
∂f (x)
∂x1
f1
f2
∂f
(x)
f = . = ∂x
2
..
.
..
fn
∂f (x)
∂xn
`e il vettore gradiente contenente le produttivit`a marginali; la quantit`a γij `e data dall’elemento posto
all’incrocio dell’i-esima riga e la j-esima colonna della matrice inversa dell’Hessiana bordata7 della
funzione di produzione data da
0 f0
G=
,
(17)
f H
dove
∂ 2 f (x)
∂x2
1
2
∂ f (x)
H = ∂x ∂x
1 2
..
.
∂ 2 f (x)
∂x1 ∂xn
∂ 2 f (x)
∂x1 ∂x2
∂ 2 f (x)
∂x22
..
.
∂ 2 f (x)
∂x2 ∂xn
...
...
...
∂ 2 f (x)
∂x1 ∂xn
∂ 2 f (x)
∂x2 ∂xn
..
.
∂ 2 f (x)
∂x2n
`e la matrice Hessiana contenente le derivate seconde.
Per la regola di inversione di una generica matrice quadrata8 il coefficiente γij `e definito come
γij =
7
8
|Gij |
,
|G|
Per la definizione della matrice Hessiana bordata di f (x) si veda la Proposizione 3 in Appendice.
Si veda in proposito la Proposizione 2 in Appendice.
8
(18)
dove |G| `e il determinante dell’Hessiana bordata, mentre |Gij | `e un minore di G, cio`e il determinante
della matrice Hessiana bordata alla quale sono state tolte la i-esima riga e la j-esima colonna.9
Per la propriet`
a 3 della Proposizione 1 unitamente alla definizione di cui alla (16) si evince che
l’elasticit`a parziale di sostituzione `e sempre simmetrica, quindi vale la relazione σij = σji . Naturalmente, quando la tecnologia comprende solo due input (n = 2), l’elasticit`a parziale di sostituzione
coincide col valore dell’elasticit`
a di sostituzione ordinaria σ di cui alla (13).
Dimostrazione:
Partendo dalla seconda espressione di cui alla (13), occorre dimostrare che essa `e uguale all’elasticit`
a parziale di
sostituzione tra gli (unici) input x1 e x2 . Analiticamente deve perci`
o risultare
∂(x2 /x1 )
SMST(x1 , x2 )
∂ SMST(x1 , x2 )
x2 /x1
=
=
=
γ12 0
xf
x1 x2
|Gij | x1 f1 + x2 f2
|G|
x1 x2
f1 f2 x1 f1 + x2 f2
,
|G|
x1 x2
in quanto vale la relazione
0
|G12 | = f2
dove f12 =
f1 = −f1 f2 ,
f12 ∂ 2 f (x)
. Calcolando il differenziale del rapporto x2 /x1 si ha
∂x2 ∂x1
d(x2 /x1 )
=
=
=
=
Dato che SMST(x1 , x2 ) =
∂(x2 /x1 )
∂(x2 /x1 )
dx1 +
dx2
∂x1
∂x2
1
x2
dx2
− 2 dx1 +
x1
x1
x1 dx2 − x2 dx1
x21
dx2
x1
− x2
dx1
dx1
x21
dx2
f1
= − , risulta
dx1
f2
f1
+ x2
f2
dx1
−
2
x1
x1 f1 + x2 f2
−
dx1
x21 f2
x1
d(x2 /x1 )
=
=
Analogamente per il differenziale di SMST `e
d SMST(x1 , x2 )
=
=
=
=
∂ SMST(x1 , x2 )
∂ SMST(x1 , x2 )
dx1 +
dx2
∂x1
∂x2
∂f1 /f2
f1 /f2
−
dx1 +
dx2
∂x1
∂x2
1
∂f1
∂f2
∂f1
∂f2
− 2
f2 −
f1 dx1 −
f2 −
f1 dx2
f2
∂x1
∂x1
∂x2
∂x2
[f11 f2 − f21 f1 ]dx1 + [f12 f2 − f22 f1 ]dx2
.
−
f22
9
Si tenga presente che la matrice G ha dimensione (n + 1) × (n + 1) che ovviamente `e superiore alla dimensione di x;
nel computo del coefficiente γij ci sono quindi una riga ed una colonna che non possono mai essere escluse. In questo caso
la prima riga e la prima colonna, che contengono lo zero, non vengono mai escluse. Cos`ı, ad esempio, volendo calcolare
σ23 (i = 2, j = 3), la matrice G23 sar`
a ottenuta togliendo la terza riga e la quarta colonna di G.
9
Dato che per la definizione di SMST(x1 , x2 ) risulta dx2 = −
d SMST(xi , xj )
=
=
=
−
f1
dx1 , sostituendo si ottiene
f2
[f11 f22 − f1 f21 f2 ]dx1 − [f1 f12 f2 − f22 f12 ]dx1
f23
f11 f22 − 2f1 f21 f2 + f22 f12
dx1
f23
|G|
− 3 dx1 ,
f2
−
in quanto, per la regola di Sarrus, il determinante della matrice Hessiana bordata `e
0
f1
f2 |G| = f1 f11 f12 = f11 f22 − 2f1 f21 f2 dx1 + f22 f12 .
f2 f21 f22 L’elasticit`
a di sostituzione ordinaria di cui alla (13) vale perci`
o
f1 x1 f1 + x2 f2
dx1
−
x22 f2
x1 f1 + x2 f2 f1 f2
γij 0
f
=
=
f x.
σ = x22
|G|
x1 x2
|G|
xi xj
x1
f3
−
2
——————————
Si tenga presente che, per n > 2, l’elasticit`a parziale di sostituzione pu`o assumere sia valori positivi,
sia valori negativi: nel primo caso si parla di input concorrenti, cio`e la sostituzione dell’uno determina
l’aumento della domanda dell’altro, mentre nel secondo caso gli input sono detti complementari,
quindi la sostituzione di uno non comporta necessariamente l’aumento della domanda dell’altro. Ci`
o
`e dovuto al fatto che esistono altri fattori da poter utilizzare all’interno del processo di produzione.
Allen (1938) mostra che i valori positivi di σij devono essere pi`
u numerosi e/o pi`
u importanti di
quelli negativi.
Dimostrazione:
Innanzi tutto si definisce con hj la quota del costo totale spesa per l’input j-esimo. Essa `e per definizione positiva o al
limite nulla.
xj fj
hj = 0 .
xf
Moltiplicando gli elementi dell’i-esima riga della matrice G per i complementi algebrici relativa ad una riga k con 6= i,
per la Proposizione 5 risulta
n
X
gij (−1)i+j |Gkj | = 0.
j=1
Analogamente risulta
n
X
j=1
hj σkj =
n
X
fj |Gkj |
= 0.
xi |G|
j=1
Esplicitando la somma si ha
h1 σk1 + h2 σk2 + . . . + hk−1 σkk−1 + hk σkk + hk+1 σkk+1 + . . . + hn σkn = 0
h1 σk1 + h2 σk2 + . . . + hk−1 σkk−1 + hk+1 σkk+1 + . . . + hn σkn = −hk σkk .
Poich´e per il Proposizione 4 risulta hk σkk < 0 per ∀ k, si ottiene
h1 σk1 + h2 σk2 + . . . + hk−1 σkk−1 + hk+1 σkk+1 + . . . + hn σkn > 0
——————————
1.4
Rendimenti di scala
Per quanto riguarda l’elasticit`
a di sostituzione l’interesse era concentrato sulla variazione di un solo
input all’interno del processo produttivo. Per vedere cosa accade quando tutti gli input variano nello
stesso momento occorre utilizzare il concetto di rendimento di scala.
Dato il vettore x ∈ V (y) degli input, lo scalare y relativo alla produzione ed una costante
moltiplicativa t > 0 si afferma che una tecnologia esibisce rendimenti di scala
10
- costanti se f (t · x) = t · f (x): il livello di produzione `e aumentato esattamente nella stessa misura
in cui sono aumentati i fattori produttivi;
- crescenti se f (t · x) > t · f (x): il livello di produzione `e aumentato pi`
u di quanto `e aumentato
l’impiego dei fattori produttivi;
- decrescenti se f (t · x) < t · f (x): il livello di produzione `e aumentato meno di quanto `e aumentato
l’impiego dei fattori produttivi.
Un indicatore di quanto cambia la produzione quando varia la scala dei fattori `e l’elasticit`
a di
scala, calcolata rispetto la situazione di t = 1. La sua definizione analitica `e
∂f (t · x) f (t · x) ∂ ln f (t · x) ∂f (t · x)
t
.
ε(x) = =
(19)
= ∂t
∂t
f (t · x) t=1 ∂ ln t t=1
t
t=1
Il valore critico `e ε(x) = 1 che corrisponde ai rendimenti di scala costanti; valori maggiori/minori di
1 indicano rendimenti di scala crescenti/decrescenti.
1.5
Omogeneit`
a
Strettamente connesso al concetto di rendimento di scala `e quello relativo all’omogeneit`a delle funzione
di produzione f (x); in particolare, una funzione `e detta omogenea di grado k se `e verificata la relazione
f (t · x) = tk f (x)
(20)
per ∀ t > 0. I due casi pi`
u importanti sono i seguenti:
- Se k = 0 significa che l’incremento di quantit`a negli input non produce variazioni nel livello di
output prodotto. Analiticamente risulta perci`o
f (t · x) = f (x);
- Se k = 1 l’incremento dell’output `e pari all’incremento effettuato sulla quantit`a dei fattori
produttivi impiegati, cio`e
f (t · x) = t · f (x).
In questo caso la tecnologia esibisce rendimenti di scala costanti. Inoltre, se k > 1 i rendimenti di
scala sono crescenti e per k < 1 i rendimenti di scala sono decrescenti.
Le principali propriet`
a delle funzioni omogenee sono
1. l’elasticit`a di scala calcolata su funzioni omogenee `e costante, infatti
ε(x) =
∂ ln tk f (x)
∂k ln t + ln f (x)
=
= k.
∂ ln t
∂ ln t
(21)
2. se f (x) `e omogenea di grado k, allora tutte le funzioni del vettore gradiente (produttivit`
a
marginali) ∂f (x)/∂x sono omogenee di grado k − 1.
11
Dimostrazione:
Differenziando entrambi i membri della funzione (20) rispetto al generico input xi , si ottiene
∂f (t · x)
∂f (x)
t = tk
∂xi
∂xi
∂f (t · x)
k−1 ∂f (x)
=t
.
∂xi
∂xi
Inoltre, data questa definizione, `e evidente che, per i 6= j, deve valere
∂f (t · x)
∂f (x)
∂(xi )
∂xi
=
= SMST(xi , xj ),
∂f (t · x)
∂f (x)
∂(xj )
∂xj
dato che tk−1 si semplifica. Si noti che l’equazione precedente ci dice che, se la funzione di produzione `e omogenea,
il SMST(xi , xj ) `e costante lungo i raggi uscenti dall’origine, cio`e non dipende dalla scala di produzione.
——————————
3. Teorema di Eulero: se la funzione di produzione `e omogenea, la sommatoria del prodotto
tra le produttivit`
a marginali e le quantit`a di fattori `e uguale all’elasticit`a di scala (costante)
moltiplicata per l’output, cio`e
f 0 x = kf (x)
(22)
Dimostrazione:
Derivando entrambi i membri della (20) rispetto t, si ottiene
∂f (t · x)
= ktk−1 f (x)
∂t
∂f (t · x) ∂(t · x)
= ktk−1 f (x)
∂(t · x)
∂t
∂f (t · x)
x = ktk−1 f (x)
∂(t · x)
che vale per ∀ t; l’equazione di Eulero `e ottenuta in corrispondenza di t = 1, infatti
∂f (x)
x = kf (x)
∂(x)
⇒
f 0 x = kf (x)
——————————
1.6
Omoteticit`
a
Date le funzioni g(x) : Rn −→ R omogenea e h(z) : Rn −→ R monot`ona e continua, una funzione `e
detta omotetica se pu`
o essere specificata come il prodotto di composizione
φ(x) = h[g(x)].
(23)
le principali propriet`
a delle funzioni omotetiche sono:
1. tutte le funzioni omogenee sono omotetiche, mentre non tutte le funzioni omotetiche sono
omogenee (cfr. Vaglio, 2004).
12
Dimostrazione:
Se g(x) `e omogenea di grado k e h(z) `e omogenea di grado r, φ(x) `e omogenea di grado kr. Questa propriet`
a
dimostra la prima parte dell’enunciato. In generale, se g(t · x) = tk g(x) e h(t · z) = tr h(z), deve valere
φ(t · x) = h[g(t · x)] = h[tk g(x)] = (tk )r h[g(x)] = tkr φ(x)
Per la seconda parte dell’enunciato basta ripercorrere la formula a ritroso per scoprire che esistono funzioni tali
per cui pu`
o risultare
tkr φ(x) 6= tkr h[g(x)].
——————————
q
Esempio 2 Si consideri la funzione φ(x) = xα1 xβ2 . In questo caso si hanno g(x) = xα1 xβ2 e
√
h(z) = z. Queste funzioni sono entrambe omogenee, infatti
g(t · x) = √
(t · x1 )α (t · x1 )β = tα+β xα1 xβ2 = tα+β g(x)
√
,
h(t · z) = t · z = t1/2 z = t0.5 h(z)
dove k = (α + β) e r = 0.5. La funzione φ(x) `e perci`
o omogenea, infatti
q
p
φ(t · x) = h[g(t · x)] = h[tα+β g(x)] = tα+β g(x) = t0.5(α+β) g(x) = t0.5(α+β) h[g(x)],
dove l’ordine di omogeneit`
a `e dato dal prodotto kr = 0.5(α + β).
Se si considera invece la funzione g(x) = 10 − xα1 xβ2 , questa non `e omogenea in quanto risulta
g(t · x) = 10 − (t · x1 )α (t · x1 )β = 10 − tα+β xα1 xβ2 6= tα+β g(x).
q
In base a questa propriet`
a la funzione omotetica φ(x) = 10 − xα1 xβ2 non pu`
o essere omogenea.
2. se le funzioni g(x) e h(z) sono omogenee e differenziabili almeno una volta, il SMST(xi , xj ),
cio`e il rapporto tra due derivate parziali di una funzione omotetica, `e una funzione omogenea di
grado zero.
∂φ(x)
∂g(x)
h0 [g(x)]
gi
∂xi
∂xi
SMST(xi , xj ) = −
=−
=− .
(24)
∂φ(x)
∂g(x)
gj
0
h [g(x)]
∂xj
∂xj
Dimostrazione:
Se g(x) `e omogenea di grado k, per il Teorema di Eulero gi e gj sono omogenee di grado k − 1, quindi il loro
rapporto `e
∂φ(t · x)
tk−1 gi
gi
∂xi
= R(x).
R(t · x) =
= k−1 =
∂φ(t · x)
t
gj
gj
∂xj
——————————
13
2
Scelte ottime dell’impresa
Come `e noto, in microeconomia l’impresa persegue l’obiettivo della massimizzazione del profitto,
ovvero la differenza tra i ricavi totali (RT) ed i costi totali (CT), in formule
Π(y) = RT(y) − CT(y)
= p(y) · y − C(w, y)
= p[f (x)] · f (x) − w0 x,
(25)
dove tutte le funzioni indicate dipendono dal livello di produzione dell’impresa. In particolare:
- p(y) definisce il prezzo di vendita del prodotto come funzione della quantit`a prodotta fornita
dalla funzione di produzione (curva inversa di domanda dell’impresa);
- C(w, y) = w0 x definisce la funzione di costo dell’impresa che dipende della variabile endogena
y e dai parametri forniti all’interno del vettore w.
Naturalmente il valore massimo per la funzione di profitto (25) sar`a dato dal livello di produzione
y ∗ = f (x∗ ) che garantisce
(a) o il minimo costo sotto il vincolo della funzione di produzione,
(b) o il massimo per la produzione sotto il vincolo di costo.
2.1
Funzione di costo
Dato il vettore w > 0 contenente il prezzo degli n input, si definisce la funzione di costo come soluzione
del seguente problema di minimo:
C(w, y) = min{w0 x|y ≤ f (x)}.
(26)
Dalla (26) si evince che la funzione obiettivo del problema di minimo `e data dalla somma degli input
ponderati per i rispettivi prezzi, mentre il vincolo fissa il livello di output ad una quantit`a che sia pari
almeno ad y. Diewert (1982) e Shephard (1953) illustrano le seguenti propriet`a delle funzioni di costo:
1. C(w, y) ≥ 0 per ∀ w > 0 e y > 0;
Dimostrazione:
Supponendo che il vettore x∗ ≥ 0 sia quello che minimizza la funzione di costo, si avr`
a che C(w, y) = w0 x∗ .
Poich´e per definizione w > 0, allora anche la funzione di costo ritorna valori positivi.
——————————
2. Per il teorema di Weierstrass la funzione C(w, y) deve essere continua nello spazio Rn+ in
corrispondenza di w > 0.
3. La funzione di costo `e linearmente omogenea nei prezzi per qualsiasi livello di output, quindi
C(t · w, y) = t · C(w, y)
per ∀ w > 0, y > 0.
14
Dimostrazione:
C(t · w, y)
=
min{t · w0 x|y ≤ f (x)}
=
t · min{w0 x|y ≤ f (x)}
=
t · C(w, y)
——————————
4. La funzione di costo `e monot`
ona non decrescente nei prezzi dei fattori, infatti, per qualsiasi
valore prefissato di y, risulta
⇒
se w1 > w2
C(w1 , y) ≥ C(w2 , y).
(27)
Dimostrazione:
Dalla (27) si evince che, se il vettore dei prezzi degli input aumenta in almeno una sua componente, il costo minimo
per produrre la stessa quantit`
a di output sicuramente non diminuisce; tuttavia tale costo potrebbe addirittura
restare invariato nell’ipotesi in cui nel processo di produzione l’input il cui costo `e aumentato venisse escluso da
tale processo o sostituito da altri fattori scarsamente utilizzati in precedenza.
——————————
5. A parit`a di w, la funzione di costo `e non decrescente nel livello di output, cio`e
⇒
se y1 > y2
C(w, y1 ) > C(w, y2 ).
(28)
Dimostrazione:
Si pensi allo schema isoquanto-isocosto: non `e mai possibile raggiungere un isoquanto pi`
u “alto” rimanendo lungo
la stessa retta di isocosto poich´e l’intersezione (punto di tangenza) `e, per definizione, il punto in cui il costo `e
minimo per l’impresa; aumentare la quantit`
a prodotta porta perci`
o inevitabilmente ad un aumento dei costi.
Cambiando il punto di vista si potrebbe dire che la quantit`
a di input per produrre y1 `e sicuramente sufficiente per
produrre y2 , ma non rappresenta la quantit`
a ottima; dall’altro lato, la quantit`
a necessaria per produrre y2 non
pu`
o essere mai sufficiente per produrre y1 .
——————————
6. La funzione di costo `e concava in w, cio`e
C(θw1 + (1 − θ)w2 , y) ≥ θC(w1 , y) + (1 − θ)C(w2 , y)
per ∀ y ∈ R+ e θ ∈ [0, 1]. Questa propriet`a garantisce inoltre che
∂ 2 C(w, y)
<0
∂wi2
per ∀ i ∈ [1, n].
Dimostrazione:
Siano C(w1 , y) = w10 x1 e C(w2 , y) = w20 x2 due funzioni di costo, si costruisce la combinazione lineare
C(w, y) = w0 x
⇒
C(θw1 + (1 − θ)w2 , y) = θw10 x + (1 − θ)w20 x.
Poich´e per w1 ≤ w ≤ w2 deve valere
- w10 x1 ≤ w10 x
⇒
w10 x ≥ C(w1 , y),
- w20 x2 ≤ w20 x
⇒
w20 x ≥ C(w2 , y),
15
(29)
allora risulta
C(θw1 + (1 − θ)w2 , y)
=
θw10 x + (1 − θ)w20 x
≥
θw10 x1 + (1 − θ)w20 x2
≥
θC(w1 , y) + (1 − θ)C(w2 , y).
——————————
7. Teorema di Diewert (1982)-Shephard (1953): se la funzione di produzione `e omotetica ed
omogenea di grado 1, quindi f (x) = h[g(x)], allora risulta
C(w, y) = h−1 (y)C(w, 1)
dove C(w, 1) `e la funzione di costo unitario dell’impresa.
Dimostrazione:
C(w, y)
=
min{w0 x|f (x) ≥ y}
=
min{w0 x|h[g(x)] ≥ y}
=
min{w0 x|g(x) ≥ h−1 (y)}.
Moltiplicando e dividendo per h−1 (y) si ha
C(w, y) = min h−1 (y)w0 x
Ponendo z =
1
h−1 (y)
g(x)
≥
1
.
h−1 (y)
x
si ottiene
h−1 y
C(w, y)
=
min{h−1 (y)w0 z|g(z) ≥ 1}
=
h−1 (y) min{w0 z|g(z) ≥ 1}
=
h−1 (y)C(w, 1)
——————————
8. Teorema di Samuelson-Shephard: se la funzione di produzione `e omogenea di grado k risulta
C(w, y) = y 1/k C(w, 1),
(30)
dove k > 0 `e l’elasticit`
a di scala. Questo teorema rappresenta un caso particolare del Teorema
di Diewert-Shephard.
Dimostrazione:
Imponendo t = y, dalla (20) risulta
f (y · x) = y k f (x)
f (y −1/k x) = y −1 f (x).
Sostituendo nella funzione di costo si ottiene
C(w, y)
=
min{w0 x|f (x) ≥ y}
=
min{w0 x|y −1 f (x) ≥ 1}
=
min{y 1/k y −1/k w0 x|f (y −1/k x) ≥ 1}.
Ponendo z = y −1/k x si ha
C(w, y)
=
min{y 1/k w0 z|f (z) ≥ 1}
=
y 1/k min{w0 z|f (z) ≥ 1}
=
y 1/k C(w, 1).
——————————
16
2.2
Minimizzazione dei costi
Sotto l’ipotesi che il mercato sia concorrenziale, cio`e composto da imprese price taker e nel quale
quantit`a prodotte e prezzi siano dati, il ricavo totale si configura come una quantit`a esogena. In
questo contesto l’impresa massimizza il profitto risolvendo il seguente problema di minimo vincolato:
min C(w, y) = w0 x
(31)
sub f (x) = y0 ,
dove C(w, y) `e la funzione di costo dell’impresa, f (x) `e la funzione di produzione dell’impresa e y0 `e
un dato livello di output che l’impresa `e tenuta a produrre.
La soluzione del sistema `e ottenuta attraverso il Lagrangiano
L(x, λ) = w0 x − λ[f (x) − y0 ]
(32)
che, derivato rispetto a λ e al vettore x, ritorna il seguente sistema di n + 1 equazioni con n + 1
incognite (λ, x)
y0 − f (x) = 0
(1 equazione)
(33)
w − λf = 0
(n equazioni).
2.2.1
Costi marginali e costi medi
Le soluzioni del sistema (31) sono
(a) la domanda condizionale di fattori produttivi (o domanda hicksiana)
x0 = x0 (w, y0 )
(34)
che corrisponde ad un vettore in cui ciascuna componente costituisce una funzione dipendente
da tutti gli input e dal livello prefissato di produzione (ciascuna domanda `e perci`o condizionata
dal fatto che che y = y0 );
(b) il moltiplicatore di Lagrange `e pari a
1¯
C(w, y0 ) = C0 (w, y0 ),
(35)
k
¯
dove le espressioni C(w,
y0 ) e C0 (w, y0 ) indicano rispettivamente il costo medio ed il costo
marginale condizionali al fatto che la produzione `e stata fissata sul livello y = y0 . Questa
relazione fissa inoltre la relazione che intercorre tra questi due tipi di funzione di costo.
λ∗ = λ∗ (w, y0 ) =
Dimostrazione:
1. λ∗ = C0 (w, y):
Si consideri la funzione di costo calcolata in corrispondenza della soluzione x = x0 e la si derivi rispetto alla
produzione. Tale derivata equivale a
C0 (w, y)
=
=
=
∂ C(w, y)
∂y
∂w0 x0
∂y
∂w0 x0
− λ(w, y)[f (x0 ) − y],
∂y
dove f (x0 ) − y = 0 per definizione, quindi si pu`
o scrivere
∂ C(w, y)
∂λ(w, y)
∂f (x0 )
∂ x0
= w0
−
[f (x0 ) − y] + λ(w, y)
−1
∂y
∂y
∂y
∂y
∂λ(w, y)
∂f (x0 ) ∂x0
0 ∂ x0
= w
−
[f (x0 ) − y] + λ(w, y)
− λ(w, y)
∂y
∂y
∂x0 ∂y
∂λ(w,
y)
∂
x
∂x0
0
= w0
−
[f (x0 ) − y] + λ(w, y)f 0
− λ(w, y)
∂y
∂y
∂y
∂λ(w, y)
∂ x0
= [w0 − λ(w, y)f 0 ]
−
[f (x0 ) − y] − λ(w, y) .
∂y
∂y
17
Poich´e [f (x0 ) − y] = 0 (vincolo sulla funzione di produzione) e [w0 − λ(w, y)f 0 ] = 0 (condizione del primo
ordine sul Lagrangiano), `e chiaro che risulta
λ∗ (w, y) = C0 (w, y).
2. λ∗ =
1¯
C(w, y):
k
Si consideri il sistema di n equazioni di cui alla seconda espressione in (33) e si moltiplichino entrambi i membri
per x0 . Il risultato che si ottiene `e
w0 x = λf 0 x
λ∗ = (f 0 x)−1 w0 x,
dove C(w, y) = w0 x `e il costo totale dell’impresa, mentre f 0 x rappresenta la somma dei costi dei fattori produttivi
ponderata per il contributo che ciascun fattore produttivo d`
a alla produzione.
Applicando l’equazione di Eulero si ottiene f 0 x = kf (x) quindi, risulta
λ∗ =
C(w, y)
.
ky
C(w, y)
¯
Poich´e il costo medio `e definito come C(w,
y) =
, allora risulta
y
λ∗ =
1¯
C(w, y).
k
——————————
Il parametro k relativo all’elasticit`
a di scala `e decisivo per stabilire il rapporto tra costo medio e
costo marginale, infatti
¯
- se k = 1 (rendimenti di scala costanti) risulta C(w,
y0 ) = C0 (w, y0 ),
¯
- se k > 1 (rendimenti di scala crescenti) risulta C(w,
y0 ) > C0 (w, y0 ),
¯
- se 0 < k < 1 (rendimenti di scala decrescenti) risulta C(w,
y0 ) < C0 (w, y0 ).
Questa caratteristica delle funzioni di costo `e determinabile anche utilizzando le definizioni analitiche
di costo medio e costo marginale, infatti
¯
∂ C(w,
y)
∂y
=
=
=
=
∂C(w, y)/y
∂y
1 ∂C(w, y)
y − C(w, y)
y2
∂y
1 ∂C(w, y) C(w, y)
−
y
∂y
y
1 0
¯
[C (w, y) − C(w,
y)].
y
Da questo risultato emerge che
¯
- se C(w,
y0 ) = C0 (w, y0 ) i rendimenti di scala sono costanti quando la curva del costo medio `e
orizzontale,
¯
- se C(w,
y0 ) > C0 (w, y0 ) i rendimenti di scala crescenti quando la curva del costo medio `e
decrescente,
¯
- se C(w,
y0 ) < C0 (w, y0 ) i rendimenti di scala decrescenti) quando la la curva del costo medio `e
crescente.
18
Si noti che gli schemi neoclassici con le curve di costo a “U” oppure quelli con le c.d. “curve a catino”
rispettano in pieno tutte queste condizioni.
Il problema di cui alla (31) non `e sempre risolvibile con il metodo illustrato poc’anzi. Possono
pertanto verificarsi alcune situazioni particolari come
• la funzione di produzione non `e differenziabile (presenza di cuspidi o punti angolosi nella mappa
degli isoquanti);
• alcuni fattori produttivi possono essere esclusi dal processo produttivo, quindi risulta xi = 0 per
almeno un i ∈ [1, n]. In questo caso dalla (33) si hanno le c.d. soluzioni d’angolo e risulta
w − λf ≥ 0
⇒
p(y)f ≤ w,
cio`e esiste almeno un input per il quale la produttivit`
a marginale in valore `e inferiore al costo
dell’input stesso. Questo risultato deriva direttamente dall’ipotesi di mercato concorrenziale nel
quale vale l’uguaglianza λ = C0 (w, y) = p(y).
2.2.2
Lemma di Shephard
Il lemma di Shephard costituisce un importante risultato in quanto afferma che la domanda condizionale del fattore produttivo i-esimo `e data dalla quantit`a ottimale dello stesso, cio`e quella quantit`
a
che rende minimo il costo per l’impresa.
Sia x∗i = x∗i (w, y) la domanda condizionale dell’i-esimo input, se la funzione di costo `e differenziabile rispetto agli elementi del vettore w, allora risulta:
∂ C(w, y)
.
(36)
∂wi
In pratica, il Lemma di Shephard afferma che la variazione di prezzo di un fattore produttivo comporta
una variazione del costo totale (minimo) dell’impresa pari alla domanda/utilizzo del fattore stesso.
x∗i =
Dimostrazione:
Scrivendo la funzione di costo come C(w, y) = w0 x0 , dove x0 = x0 (w, y) `e la stessa definita dall’equazione (34), la
derivata rispetto all’i-esimo input `e
0
∂ C(w, y)
∂w
∂x0
=
x0 + w 0
∂wi
∂wi
∂wi
∂x0
= x0i + w0
.
∂wi
Dall’equazione (33) risulta w − λf = 0 quindi, sostituendo, si ottiene
∂ C(w, y)
∂wi
=
=
=
∂x0
x0i + λf 0
∂wi
0
∂f (x) ∂x0
x0i +
∂x0
∂wi
∂y
x0i + λ
∂wi
Poich´e la quantit`
a y `e data, la derivata della funzione di produzione rispetto all’i-esimo input `e nulla per definizione,
quindi si ottiene li Lemma di Shephard
∂ C(w, y)
xi =
.
∂wi
——————————
Dal Lemma di Shephard deriva la propriet`a secondo la quale la funzione di domanda condizionale
di fattori produttivi `e omogenea di grado zero.
Dimostrazione:
Se la funzione di costo ha la propriet`
a di essere linearmente omogenea nei fattori produttivi, allora la sua derivata rispetto
ad essi deve essere omogenea di grado zero.
——————————
19
2.2.3
Equilibrio dell’impresa rispetto alla produzione
Riprendendo la seconda equazione di cui alla (25) si ha
Π(y) = p(y) · y − C(w, y),
cio`e una funzione nel livello di output y da massimizzare. L’equilibrio dell’impresa `e perci`o ottenuto
con la classica uguaglianza tra ricavo marginale e costo marginale che scaturisce dall’applicazione della
condizione del primo ordine, infatti
∂Π(y)
=0
∂y
⇒
∂p(y) · y
∂ C(w, y)
=
∂y
∂y
⇒
R0 (y) = C0 (w, y).
Il ricavo marginale R0 (y) `e una funzione del livello di produzione y che corrisponde alla derivata del
ricavo totale rispetto alla variabile y. Essa ha le seguenti propriet`a:
1. Il ricavo marginale non pu`
o essere negativo, altrimenti l’impresa avrebbe ricavi totali decrescenti
all’aumentare della quantit`
a prodotta; il ricavo marginale `e nullo in corrispondenza del punto di
massimo del ricavo totale.
Dimostrazione:
Intuitivamente si pensi al caso in cui l’impresa abbia solo costi fissi (che non dipendono perci`
o dalla quantit`
a
prodotta y), quindi il costo marginale `e nullo: in questo caso l’impresa massimizzerebbe il proprio profitto in
corrispondenza del livello di output per il quale il ricavo marginale `e anch’esso nullo, cio`e nel punto di massimo
della curva del ricavo totale.
——————————
2. Il ricavo marginale `e in relazione con l’elasticit`a della domanda al prezzo ε(y, p), cio`e
1
0
p(y).
R (y) = 1 +
ε(y, p)
(37)
Poich´e il ricavo marginale non pu`
o essere negativo, questa relazione vale quando la domanda `e
elastica, cio`e ε(y, p) ≤ −1. Ad una domanda rigida ε(y, p) ∈ (−1, 0] corrisponde perci`o un ricavo
marginale negativo, pertanto non ammissibile.
Dimostrazione:
R0 (y)
=
=
=
=
∂p(y) · y
∂y
∂p(y)
y + p(y)
∂y
∂p(y) y
+ 1 p(y)
∂y p(y)
1
1+
p(y).
ε(y, p)
——————————
Quando l’impresa `e in equilibrio, l’inversa della (37) definisce il mark up, cio`e un moltiplicatore
che indica di quanto la singola impresa riesce a ricaricare il prezzo rispetto ai costi marginali.
Analiticamente si ha perci`
o
−1
1
ε(y, p)
0
p(y) = 1 +
C (w, y) =
C0 (w, y)
ε(y, p)
ε(y, p) + 1
con ε(y, p) ≤ −1.
20
3. Il ricavo marginale `e sempre non superiore al ricavo medio (prezzo).
Dimostrazione:
Poich´e ε(y, p) ∈ (−∞, −1], dalla (37) segue immediatamente che
R0 (y) ≤ p(y),
dove l’uguaglianza stretta vale nel caso della concorrenza perfetta, cio`e quando ε(y, p) → −∞.
——————————
4. Se il prezzo p `e esogeno (costante), cio`e non non dipende dal livello di produzione y, il ricavo
marginale `e
∂p · y
R0 (y) =
= p,
(38)
∂y
quindi `e sempre uguale al ricavo medio. In questo caso l’impresa opera in un mercato di
concorrenza perfetta e non ha potere di mercato (price taker ).
Affinch´e si possa applicare l’uguaglianza tra ricavi marginali e costi marginali, `e necessario che la
funzione di profitto abbia i seguenti requisiti:
(a) deve essere differenziabile, quindi le funzioni di produzione e di costo devono essere differenziabili
rispetto alla variabile y;
(b) deve avere il proprio massimo per y ∗ ∈ R+ , altrimenti i ricavi totali sarebbero negativi;
(c) affinch´e abbia un punto di massimo, la funzione di profitto deve essere concava in y, cio`e
∂ 2 Π(y)
< 0.
∂y 2
In concorrenza perfetta questa relazione implica che
- la funzione di costo deve essere convessa in y, infatti
∂ 2 Π(y)
<0
∂y 2
∂ 2 p · y ∂ 2 C(w, y)
−
<0
∂y 2
∂y 2
∂ C0 (w, y)
−
<0
∂y
∂ C0 (w, y)
> 0;
∂y
- l’equilibrio dell’impresa `e possibile solo nel tratto crescente dei costi marginali;
¯
y), allora l’equilibrio dell’impresa pu`o avvenire solo se i rendimenti
- poich´e C0 (w, y) = k1 C(w,
di scala sono decrescenti;
- il profitto massimo deve essere positivo, cio`e
• se p ≥ C0 (w, y ∗ ) l’impresa produce y = y ∗ ,
• se p < C0 (w, y ∗ ) l’impresa non produce (y = 0);
21
- La quantit`
a prodotta che massimizza il profitto `e data da y = y ∗ la quale garantisce che
R0 (y ∗ ) = C0 (w, y ∗ ) sia verificata; naturalmente per un mercato perfettamente concorrenziale
vale la relazione p = C0 (w, y ∗ ). In particolare, la quantit`a di equilibrio si configura come
la quantit`
a offerta dall’impresa (i costi marginali quindi si configurano come la funzione
inversa di offerta) che dipende dal livello del prezzo e dal costo dei fattori produttivi, quindi
y ∗ = y s (p, w).
L’analogia con l’equazione (1) `e perci`o evidente;
- derivando la condizione di equilibrio rispetto al prezzo si ottiene
∂ C0 (w, y ∗ )
∂p
∂ C0 (w, y ∗ ) ∂y ∗
1 =
∂y ∗
∂p
−1
0
∗
∗
∂ C (w, y )
∂y
> 0.
=
∂p
∂y s (p, w)
∂p
∂p
=
La curva di offerta dell’impresa `e perci`o crescente rispetto al prezzo.
2.2.4
Equilibrio dell’impresa rispetto ai fattori produttivi
Concentrando l’attenzione sugli input, la funzione di profitto pu`o essere scritta come segue
Π(x) = p · f (x) − w0 x,
dove la quantit`a prodotta dipende dalla quantit`a impiegata di fattori produttivi, mentre il prezzo `e un
dato, quindi implicitamente si fa riferimento ad un mercato perfettamente concorrenziale. In questo
contesto la funzione di produzione f (x) `e nota, mentre la funzione di costo non lo `e.
L’equilibrio dell’impresa `e ottenuto come segue
∂Π(x)
=0
∂x
∂f (x) ∂w0 x
p
−
=0
∂x
∂x
p·f −w =0
pf = w.
(39)
Esso `e fornito dall’uguaglianza tra produttivit`
a marginale in valore e costo dei fattori produttivi.
In particolare
- se fi > wi /p l’impresa aumenta l’utilizzo del fattore produttivo i-esimo perch´e il suo contributo
alla produzione supera il suo costo reale,
- se fi < wi /p l’impresa diminuisce l’utilizzo del fattore produttivo i-esimo perch´e il suo contributo
alla produzione `e inferiore al suo costo reale.
Legge di esaustione del prodotto:
al vettore f il vettore w/p, quindi
si consideri l’equazione di Eulero (equazione (22)) sostituendo
f 0x = k · y
⇒
w0 x = k · p · y;
se k = 1 tutta la produzione viene utilizzata per remuneare i fattori produttivi. Si tenga presente che.
nel mercato di concorrenza perfetta, per k < 1 entrano nuove imprese sul mercato attirate dal fatto
22
che i ricavi sono maggiori dei costi), mentre lo scenario k > 1 non pu`o essere applicato.
La soluzione per il vettore degli input che massimizza il profitto `e data da
x∗ = x(w, y ∗ ),
(40)
che corrisponde alla domanda non condizionale di fattori produttivi (o domanda marshalliana),
ottenuta in corrispondenza del livello di produzione ottimale y = y ∗ (w, p).
Calcolando la derivata della domanda marshalliana dell’input i-esimo rispetto al prezzo del fattore
produttivo j-esimo, applicando il Lemma di Shephard si ottiene
Ciy∗ Cjy∗
∂xi (w, y ∗ ) ∂xi (w, y ∗ ) ∂y ∗
∂x∗i (w, y ∗ )
=
+
= Cij +
,
∗
∂wj
∂wj
∂y
∂wj
Cy ∗ y ∗
(41)
dove il rapporto a sinistra del segno di uguaglianza misura l’effetto totale sulla domanda di una
variazione di prezzo di un input, mentre i due addendi misurano rispettivamente
- l’effetto di sostituzione tra l’input i-esimo e l’input j-esimo `e dato da
∂xi (w, y ∗ )
∂ 2 C(w, y ∗ )
=
= Cij
∂wj
∂wi ∂wj
(42)
- l’effetto output `e dato da
∂xi (w, y ∗ ) ∂y ∗
∂y ∗
∂wj
∂ 2 C(w, y ∗ ) ∂y ∗ ∂ 2 C(w, y ∗ ) ∂y ∗
∂wi ∂y ∗ ∂wj ∂ 2 C(w, y ∗ ) ∂y ∗
2
∂ C(w, y ∗ ) ∂ 2 C(w, y ∗ )
∂y ∗2
∂wi ∂y ∗
∂wj ∂y ∗ ∂ 2 C(w, y ∗ )
Ciy∗ Cjy∗
.
Cy∗ y∗
=
=
=
(43)
Le equazioni (41), (42) e (43) evidenziano che, presi due generici input xi ed xj , l’effetto di sostituzione, l’effetto output e l’effetto totale sono tutti simmetrici.
L’elasticit`a della domanda dell’input xi rispetto al prezzo dell’input xj `e invece pari a
ε(xi , wj ) = Sj
Cij
C(w, y) = Sj σij ,
Ci Cj
(44)
wj x j
`e la factor share del j-esimo
C(w, y)
fattore produttivo, mentre σij `e l’elasticit`
a di sostituzione tra gli input i e j.
dove, per il Lemma di Shephard Ci = xi e Cj = xj , Sj =
Dimostrazione:
ε(xi , wj )
=
∂xi wj
∂wj xi
=
∂ 2 C(w, y) wj xj C(w, y)
∂wi ∂wj xi xj C(w, y)
=
=
∂ 2 C(w, y) wj xj C(w, y)
∂wi ∂wj C(w, y) xi xj
Cij 0
Sj
wx
xi xj
23
Dato che per la simmetria dell’effetto totale vale
∂xi
∂xj
=
∂wi
∂wj
⇒
∂ 2 C(w, y)
∂xi
=
∂wi ∂wj
∂fj
⇒
∂ 2 C(w, y)
∂xi ∂xj
=
∂wi ∂wj
∂2y
⇒
∂ 2 C(w, y)
= γij (inversa matrice Hessiana),
∂wi ∂wj
allora risulta
=
=
γij 0
wx
xi xj
Sj σij
Sj
——————————
2.2.5
Funzione di profitto
Una volta determinate la quantit`
a ottimale di output (offerta) y ∗ = y s (w, p) e la quantit`a (domanda)
ottima di fattori produttivi x∗ = xd (w, p), `e possibile sostituirle all’interno della (25) ottenendo perci`
o
la seguente funzione di profitto
Π∗ (w, p) = p · y ∗ − w0 x∗
(45)
che dipende dal vettore dei prezzi w, ma soprattutto dal livello (esogeno) del prezzo p.
Lemma di Hotelling: il valore ottimale per il livello di output `e ottenuto derivando la funzione di
massimo profitto rispetto al prezzo, mentre il valore ottimale per la domanda di input `e dato dalla
derivata della funzione di massimo profitto rispetto al prezzo dei fattori produttivi. In formule
∂Π(w, p)
= y∗
∂p
(46)
∂Π(w,
p)
= −x∗i
∂wi
Dimostrazione:
Derivata della funzione di profitto rispetto al prezzo:
∂Π(w, p)
∂p
=
=
=
=
∂p · f (x)
∂x
− w0
∂p
∂p
∂f (x) ∂x
∂x
f (x) + p
− w0
∂x ∂p
∂p
∗
0 ∂x
0 ∂x
y + pf
−w
∂p
∂p
∗
0
0 ∂x
y + [pf − w ]
∂p
Applicando la condizione del primo ordine (39) si ottiene perci`
o
∂Π(w, p)
= y∗ .
∂p
Derivata della funzione di profitto rispetto all’i-esimo fattore produttivo:
∂Π(w, p)
∂wi
=
=
=
∂f (x)
∂w0 x
−
∂wi
∂wi
0
∂f (x) ∂x
∂w
∂x
p
−
x + w0
∂x ∂wi
∂wi
∂wi
∂x
[pf 0 − w0 ]
− xi .
∂wi
p
Applicando la condizione del primo ordine (39) si ottiene perci`
o
∂Π(w, p)
= −x∗i .
∂wi
——————————
24
Dal Lemma di Hotelling derivano alcune propriet`a della funzione di profitto:
1. la funzione di profitto deve essere differenziabile in p e wi per ∀ i;
2. il profitto `e una funzione non decrescente rispetto al prezzo perch´e la quantit`a prodotta/offerta
non diminuisce;
3. il profitto `e una funzione non crescente rispetto al prezzo dell’i-esimo input perch´e la quantit`
a
domandata dello stesso non pu`
o aumentare se il suo costo aumenta;
4. la funzione di profitto `e linearmente omogenea nei prezzi (w, p), infatti
Π(t · w, t · p) = t · p · y ∗ − t · w0 x∗ = t · p · y ∗ − w0 x∗ = p · Π(w, p);
5. la funzione di profitto `e convessa nei prezzi dei fattori produttivi, infatti
∂ 2 Π(w, p)
∂x∗i
=
−
.
∂wi
∂wi2
Da questo risultato emerge anche che la matrice delle derivate seconde della funzione di profitto
coincide con la matrice delle derivate della domanda di input rispetto ai prezzi degli input stessi.
2.3
Dualit`
a
Data una tecnologia rappresentata dalla funzione di produzione f (x), l’impresa ha l’obiettivo di minimizzare la sua funzione di costo, quindi deve risolvere il problema di programmazione matematica
di cui alla (31).
Il principio di dualit`
a afferma che `e possibile che il processo di cui alla (31) pu`o essere “invertito”
attraverso il problema
max f (x) = y0
(47)
sub C(w, y) = w0 x,
nel quale si effettua la ricerca del massimo di f (x) sotto il vincolo costituito dalla funzione di costo.
Ci`o significa che l’informazione contenuta nella funzione di costo `e la stessa che si trova all’interno
della funzione di produzione e viceversa.
In termini analitici `e perci`
o possibile, sotto opportune condizioni di regolarit`a10 derivare un’unica
funzione di produzione che genera una funzione di costo. Sotto le stesse condizioni `e possibile anche
l’operazione inversa.
Nel prossimo capitolo si mostrer`
a che alcuni tipi di funzioni di produzione sono auto-duali, cio`e
sottointendono una funzione di costo con la loro stessa forma funzionale.
3
Forme funzionali
La scelta di un’opportuna forma funzionale per la funzione di produzione o per la funzione di costo
costituisce un elemento fondamentale per qualsiasi modello di microeconomia. In estrema sintesi,
tali forme funzionali dovrebbero avere due caratteristiche: da un lato, esse dovrebbero essere definite
in modo tale da possedere le propriet`
a discusse nelle precedenti sezioni (omogeneit`a, omoteticit`
a,
convessit`a/concavit`
a ecc.). Dall’altro, la loro forma analitica dovrebbe permettere lo svolgimento di
analisi empiriche e/o l’utilizzo di tecniche statistico-econometriche.
In microeconomia, le forme funzionali vengono generalmente suddivise in due macro categorie,
ovvero le forme funzionali rigide e le forme funzionali flessibili. Il criterio distintivo `e l’elasticit`
a
di sostituzione tra le variabili che ne costituiscono il dominio: se per qualsiasi coppia (xi , xj ), con
i 6= j, l’elasticit`
a di sostituzione non varia, allora si parla di rigidit`a. Nel caso contrario, ovvero di
un’elasticit`a che dipende da i e j, si parla di flessibilit`a.
10
Le condizioni di regolarit`
a per f (x) sono quelle enunciate nel paragrafo 1.2.
25
3.1
Forme funzionali rigide
Oggetto dei prossimi sottoparagrafi sono la forma funzionale di tipo Cobb-Douglas e di tipo CES,
due espressioni caratterizzate dal fatto che l’elasticit`a di sostituzione tra due generici input xi e xj `e
costante per ∀ i 6= j.
3.1.1
Cobb-Douglas
Dato un vettore x ∈ Rn+ , la funzione di tipo Cobb-Douglas `e data dall’espressione
y=A
n
Y
xαi i ,
(48)
i=1
dove A > 0 `e una costante moltiplicativa, mentre i coefficienti αi ≤ 0 sono detti coefficienti tecnici.
La funzione di tipo Cobb-Douglas gode delle seguenti propriet`a:
1. funzione omogenea di grado k =
n
X
αi , cio`e
i=1
y(t · x) = tk y(x).
(49)
Dimostrazione:
y(t · x)
=
A
n
Y
(t · xi )αi
i=1
Pn
αi
=
t
=
tk y(x)
i=1
A
n
Y
i
xα
i
i=1
——————————
In riferimento all’equazione (21), il parametro k indica l’elasticit`a di scala, quindi
- se k =
- se k =
- se k =
n
X
i=1
n
X
i=1
n
X
αi = 1 i rendimenti di scala sono costanti,
αi > 1 i rendimenti di scala sono crescenti,
αi < 1 i rendimenti di scala sono decrescenti;
i=1
2. funzione non decrescente nelle variabili xj ;
Dimostrazione:
Derivando la Cobb-Douglas rispetto alla variabile xj si ottiene
n
n
Y
∂y
αj Y αi
αj
α −1
i
= αj xj j A
xα
A
x =
y≥0
i =
∂xj
xj i=1 i
xj
i=1,i6=j
——————————
3. funzione concava rispetto alle variabili xj se e solo se 0 ≤ αj ≤ 1;
26
Dimostrazione:
Il generico elemento posto lungo la diagonale della matrice Hessiana derivata rispetto alla j-esima variabile `e
1
∂2y
αj
αj − 1
−
=
α
y
+
y
= αj
y.
j
∂x2j
x2j
x2j
x2j
A questo punto `e evidente che la concavit`
a dipende strettamente dalla condizione 0 ≤ αj ≤ 1 per la quale risulta
(αj − 1) ≤ 0 per ∀ j: in questo caso, la matrice Hessiana risulta (almeno) semidefinita negativa, quindi la funzione
di costo di tipo Cobb-Douglas `e concava.
——————————
4. l’elasticit`a di sostituzione `e costante pari a σ = 1 per qualsiasi coppia di variabili (xi , xj );
Dimostrazione:
Nella Cobb-Douglas il SMST `e dato dalla seguente espressione
SMST(xi , xj ) = −
quindi risulta
αi xj
,
αj xi
xj
αj
= − SMST(xi , xj ).
xi
αi
Passando al logaritmo si ha
ln
xj
αj
= ln
+ ln |SMST|(xi , xj ).
xi
αi
L’elasticit`
a di sostituzione vale perci`
o
σij =
∂ ln(xj /xi )
=1
∂ ln |SMST|(xi , xj )
per ogni i, j.
——————————
5. funzione auto-duale: per un’impresa che cerca la combinazione ottimale degli input in modo da
minimizzare il costo totale sotto il vincolo di una funzione di produzione di tipo Cobb-Douglas,
risulta che anche la sua funzione di costo `e una Cobb-Douglas;
Dimostrazione:
Si consideri il problema
min
C(w, y) = w0 x
sub
y=A
n
Y
i
xα
i
i=1
per il quale il Lagrangiano vale
0
L(x, λ) = w x − λ A
n
Y
!
i
xα
i
−y
.
i=1
Dalle condizioni del primo ordine che scaturiscono derivando la funzione L(x, λ) rispetto a ciascun input xi si
ottiene
!
n
∂L(x, λ)
αi Y αi
= wi − λ
A
x
∂xi
xi i=1 i
dalla quale `e possibile calcolare agevolmente il valore del rapporto tra i prezzi di due generici input xi e xj data
da
αj xi
wj
=
wi
αi xj
da cui deriva
αi wj
xi =
xj .
wi αj
27
Sostituendo all’interno della funzione di produzione si ha
αi
n Y
αi wj
y = A
xj
wi αj
i=1
k Y
αi
n wj
αi
.
= Axkj
αj
wi
i=1
Esplicitando per xj si ottiene la domanda condizionale del fattore produttivo j-esimo data da
xj = y 1/k
α /k
n αj −1/k Y wi i
.
A
wj
αi
i=1
Sostituendo questa l’espressione per xj nella funzione obiettivo, si determina una funzione di costo di tipo CobbDouglas, infatti
C(w, y)
=
=
n
X
i=1
n
X
wi xi
wi
i=1
=
=
Ponendo B = k · A−1/k
n
Y
−αi /k
αi
n
X
αi wj
xj
wi αj
α /k
n αj 1/k wj −1/k Y wi i
y
A
wj
αj
αi
i=1
i=1
n
α
/k
i
Y wi
k · y 1/k A−1/k
αi
i=1
αi
, risulta
i=1
C(w, y) = y 1/k B
n
Y
α /k
wi i .
i=1
——————————
6. dall’auto-dualit`
a della funzione di tipo Cobb-Douglas derivano i seguenti scenari in termini di
funzioni di costo e di rendimenti di scala: dato che la funzione di costo pu`o essere scomposta nel
prodotto
C(w, y) = Γ(w)y 1/k ,
dove Γ(w) = B
n
Y
α /k
wi i
`e funzione esclusiva del vettore w, allora risulta che le funzioni
i=1
1−k
y 1/k Γ(w)
¯
C(w,
y) =
= Γ(w)y k
y
(50)
1−k
1
∂y 1/k Γ(w)
C0 (w, y) =
= Γ(w)y k
∂y
k
sono anch’esse di tipo Cobb-Douglas. Si noti che i risultati ottenuti sono conformi alla relazione
(35). Poich´e il parametro k indica il tipo di rendimenti di scala, in caso di rendimenti costanti
¯
(k = 1) le due curve sono costanti e coincidono, cio`e vale C(w, y) = C(w,
y) = 1; gli scenari
alternativi sono rappresentati in Figura 3;
7. funzione lineare nei logaritmi, cio`e vale
ln y = ln A +
n
X
i=1
28
αi ln xi .
(51)
Figura 3: Funzione Cobb-Douglas e rendimenti di scala
(a) Rendimenti di scala crescenti (k > 1)
1
2
<k<1
(b) Rendimenti di scala decrescenti 0 < k <
¯
C0 (w, y) C(w,
y)
¯
C(w,
y)
C0 (w, y)
y
(c) Rendimenti di scala decrescenti k =
y
1
2
(d) Rendimenti di scala decrescenti
1
2
C0 (w, y)
¯
C(w,
y)
C0 (w, y)
¯
C(w,
y)
y
y
Questa formulazione rende la Cobb-Douglas adatta ad analisi econometriche basate sul modello
lineare classico di regressione (OLS) poich´e `e riconducibile alla forma
y˜ = A˜ + αi x
˜ 1 + α2 x
˜ 2 + . . . + αn x
˜n + ε
per la quale `e sufficiente soltanto assumere la validit`a delle ipotesi classiche sul termine di
errore ε. In quest’ambito, possono essere ottenute stime consistenti per i coefficienti tecnici αi e
testarne successivamente la loro positivit`a/azzeramento. Infine `e altres`ı testabile la presenza di
rendimenti costanti di scala imponendo l’ipotesi nulla
H0 :
n
X
αi = 1.
i=1
3.1.2
Elasticit`
a di sostituzione costante (CES)
Dato il vettore x ∈ R+ e lo scalare y relativo all’output d’impresa, la funzione di tipo Constant
Elasticity of Substitution, o semplicemente CES, `e data dall’espressione
" n
#k/ρ
X
ρ
y=A
β i xi
,
(52)
i=1
dove dove A `e una costante moltiplicativa, ρ ∈ (−∞, 0) ∪ (0, 1] `e il parametro relativo all’elasticit`
a di
sostituzione, k `e l’elasticit`
a si scala ed i coefficienti tecnici βi ≥ 0 rispettano la condizione
n
X
βi = 1.
i=1
29
La funzione di tipo CES gode delle seguenti propriet`a:
1. funzione omogenea di grado k, cio`e
y(t · x) = tk y(x);
(53)
Dimostrazione:
y(t · x)
=
A
" n
X
#k/ρ
ρ
βi (t · xi )
i=1
"
=
A t
ρ
n
X
#k/ρ
βi xρi
i=1
"
k
n
X
=
t A
=
tk y(x)
#k/ρ
βi xρi
i=1
——————————
Per quanto riguarda i rendimenti di scala valgono esattamente gli stessi discorsi fatti per la
Cobb-Douglas a pag. 26;
2. funzione non decrescente nelle variabili xj ;
Dimostrazione:
Derivando la Cobb-Douglas rispetto alla variabile xj si ottiene
" n
#−1
" n
# k −1
ρ
X
∂y
k X
ρ−1
ρ−1
ρ
ρ
ρβj xj = k · βj xj y
βi xi
≥0
=A
β i xi
∂xj
ρ i=1
i=1
——————————
3. funzione concava rispetto alla j-esima variabile;
Dimostrazione:
Dopo un po’ di algebra, il generico elemento posto lungo la diagonale della matrice Hessiana derivata rispetto alla
j-esima variabile `e
" n
# k −1 (
" n
#−1 )
ρ
X
X
∂2y
ρ−2
ρ
ρ
ρ
= k · Aβj x
βi xi
ρ − 1 + (k − ρ)βj xj
βi xi
.
∂xj
i=1
i=1
Il segno del fattore tra parentesi graffe determina il segno della derivata, quindi deve risultare
βj xρj
n
X
βi xρi
≤
1−ρ
,
k−ρ
i=1
dove il rapporto alla sinistra del segno di disuguaglianza ha valore compresso nell’intervallo [0, 1]. La discussione
perci`
o dipende dal valore dell’elasticit`
a di scala, infatti
- se i rendimenti di scala non sono crescenti (k ≤ 1) risulta
1−ρ
≥ 1, quindi la disuguaglianza `e sempre
k−ρ
verificata e la y(x) `e concava,
1−ρ
< 1, quindi risolvere la disuguaglianza
k−ρ
analiticamente diventa piuttosto difficile. Tuttavia, dal punto di vista numerico si pu`
o affermare che essa
risulta verificata quando k → 1+ e/o ρ → −∞.
- se i rendimenti di scala sono crescenti (k > 1), risulta 0 <
30
——————————
4. l’elasticit`a di sostituzione `e costante pari a σ =
1
per qualsiasi coppia di variabili (xi , xj );
1−ρ
Dimostrazione:
Nella CES il SMST `e dato dalla seguente espressione
SMST(xi , xj ) = −
βi
βj
xi
xj
ρ−1
quindi risulta
xj
=−
xi
αj
αi
1
1−ρ
1
SMST(xi , xj ) 1−ρ
Passando al logaritmo si ha
1
αj
1
xj
=
ln
+
ln |SMST(xi , xj )|
xi
1−ρ
αi
1−ρ
L’elasticit`
a di sostituzione vale perci`
o
ln
σij =
∂ ln(xj /xi )
1
=
∂ ln |SMST(xi , xj )|
1−ρ
per ogni i, j.
——————————
5. la Cobb-Douglas `e un caso particolare della funzione di tipo CES: in particolare, risulta
"
lim A
ρ→0
#k/ρ
n
X
βi xρi
=A
i=1
n
Y
xαi i ,
(54)
i=1
con αi = kβi .
Dimostrazione:
Quando il parametro ρ `e nullo la funzione di tipo CES non `e definita, ma esiste il suo limite che risulta essere la
funzione di tipo Cobb-Douglas, quindi11
#k/ρ
" n
" n
#
X
X
k
lim A
βi xρi
= ln A + lim ln
βi xρi .
ρ→0 ρ
ρ→0
i=1
i=1
Applicando la regola di Hˆ
opital, si ottiene
n
X
ln A + lim k
ρ→0
βi xρi ln xi
i=1
n
X
= ln A + k
βi xρi
n
X
βi ln xi
i=1
i=1
poich´e xρi → 1, quindi
n
X
βi xρi → 1.
i=1
Questa espressione corrisponde al logaritmo di una Cobb-Douglas con parametri αi = kβi
quindi
n
X
!
αi = k ,
i=1
infatti
(
exp ln A +
n
X
)
αi ln xi
i=1
11
=A
n
Y
i
xα
i
i=1
Questa propriet`
a della CES `e ottenuta attuando lo stesso procedimento che in statistica descrittiva calcola la media
geometrica come limite della funzione della media potenziata di ordine r quando r → 0.
31
——————————
Dal punto di vista dell’elasticit`
a di sostituzione `e eviedente che, quando ρ → 0, risulta σ = 1
che corrisponde all’elasticit`
a di sostituzione calcolata attraverso la Cobb-Douglas;
6. la tecnologia con proporzioni fisse (Leontief) `e un caso particolare della funzione di tipo CES,
cio`e
" n
#k/ρ
X
lim A
βi xρi
= A · min{xki }
(55)
ρ→−∞
i=1
Dimostrazione:
Ipotizzando che il j-esimo input sia quello utilizzato in quantit`
a minima, analiticamente si ha xj = min{xi },
quindi risulta xi /xj > 1 per ∀ i. Portando xj fuori dalle parentesi e calcolando il limite per ρ → −∞, la soluzione
`e immediata, infatti
" n
#k/ρ
X xi ρ
k/ρ
k
lim A · xj
= lim A · xkj βj = A · min{xki },
βi
ρ→−∞
ρ→−∞
xj
i=1
poich´e
k
xi
→ 0 per ogni i 6= j e → 0.
xj
ρ
——————————
In sintesi, dalle propriet`
a 4.-5.-6. emerge che, nella CES, l’elasticit`a si sostituzione tra due input
xi e xj dipende dai valori a assunti dal parametro ρ, infatti
- se ρ → −∞ ⇒ σ = 0
⇒ xi e xj perfettamente complementari (Leontief),
- se ρ < 0
⇒ 0 < σ < 1 ⇒ xi e xj complementari,
- se ρ → 0
⇒ σ=1
⇒ funzione Cobb-Douglas,
- se 0 < ρ < 1 ⇒ σ > 1
⇒ xi e xj sostituti,
- se ρ = 1
⇒ σ→∞
⇒ xi e xj perfetti sostituti.
7. funzione auto-duale: per un’impresa che cerca la combinazione ottimale degli input in modo da
minimizzare il costo totale sotto il vincolo di una funzione di produzione di tipo CES, risulta
che anche la sua funzione di costo `e una CES;
Dimostrazione:
Si consideri il problema
min
C(w, y) = w0 x
"
sub
y=A
n
X
#k/ρ
βi xρi
i=1
per il quale il Lagrangiano vale
"
0
L(x, λ) = w x − λ A
n
X
#k/ρ
βi xρi
− y .
i=1
Dalle condizioni del primo ordine che scaturiscono derivando la funzione L(x, λ) rispetto a ciascun input xj si
ottiene
" n
# k −1
ρ
X
∂L(x, λ)
ρ
= wj − λ · k · A
βi xi
βj xρ−1
j
∂xj
i=1
dalla quale `e possibile calcolare agevolmente il valore del rapporto tra i prezzi di due generici input xi e xj data
da
1−ρ
wj
β j xi
=
wi
βi xj
32
da cui deriva
xi =
β i wj
wi βj
1
1−ρ
xj .
Sostituendo all’interno della funzione di produzione si ha
#k/ρ
" n
ρ
X βi wj 1−ρ ρ
y = A
βi
xj
wi βj
i=1
" n
#k/ρ
k
1
wj 1−ρ k X
−ρ 1−ρ
= A
xj
.
βi wi
βj
i=1
Esplicitando per xj si ottiene la domanda condizionale del fattore produttivo j-esimo data da
xj = y
1/k
−1/k
A
βj
wj
1
1−ρ
" n
X
1
#−k/ρ
βi wi−ρ 1−ρ
.
i=1
Sostituendo questa l’espressione per xj nella funzione obiettivo, si determina una funzione di costo di tipo CES,
infatti
C(w, y)
=
n
X
w i xi
i=1
=
n
X
wi
i=1
=
n
X
βi wj
wi β j
1
βi wi−ρ 1−ρ
i=1
=
1
1−ρ
xj
wj
βj
1
1−ρ
y
−1/k
A
βj
wj
1
1−ρ
"
n
X
1
#−k/ρ
βi wi−ρ 1−ρ
i=1
" n
#−k/ρ
n
X
1 X
1
βi wi−ρ 1−ρ
y 1/k A−1/k
βi wi−ρ 1−ρ
i=1
"
=
1/k
y 1/k A−1/k
n
X
i=1
1
ρ
− 1−ρ
#− 1−ρ
ρ
βi1−ρ wi
i=1
Ponendo B = A−1/k , σ =
1
, η = −ρσ e θi = βiσ , risulta
1−ρ
C(w, y) = y
1/k
B
" n
X
#− 1
η
θi wi−η
.
(56)
i=1
——————————
8. anche nel caso della CES la funzione di costo pu`o essere scomposta come
C(w, y) = Γ(w)y 1/k ,
dove Γ(w) = B
" n
X
#− 1
η
θi wi−η
`e funzione esclusiva del vettore w.
i=1
Per quanto riguarda le curve di costo marginale e di costo medio valgono perci`o le stesse
considerazioni fatte per la Cobb-Douglas.
3.2
Forme funzionali flessibili
Le forme funzionali flessibili impongono minori restrizioni rispetto alle forme funzionali rigide, quindi
permettono la verifica di un maggior numero di ipotesi circa i loro parametri. Come gi`a anticipato,
per quanto riguarda questo tipo di funzioni l’elasticit`a di sostituzione a non `e costante per ciascuna
coppia di variabili (xi , xj ).
33
3.2.1
CES a pi`
u stadi (cenni)
Proposta da Uzawa (1962), la funzione di tipo CES a pi`
u stadi o annidata (nested CES) `e una forma
funzionale flessibile costruita su pi`
u forme funzionali rigide. In particolare, l’idea `e quella di costruire
una funzione di tipo CES utilizzando variabili che sono anch’esse costruite attraverso funzioni di tipo
CES. Per semplicit`
a, si ipotizzi che esista un regime “a 2 stadi” tali per cui risulta12
k1 /ρ0
m
X
y =B
αj cj (x)ρ0
j=1
(57)
"m
#k2 /ρj
X
ρ
β i xi j
,
cj (x) = A
i=1
dove le variabili cj (x) sono funzioni CES costruite sul vettore x, mentre ks con s = 1, 2 rappresenta
il valore dell’elasticit`
a di scala nei diversi stadi. L’equazione (57) presuppone la separabilit`
a in
forma debole cio`e l’elasticit`
a di sostituzione tra una qualsiasi coppia di elementi del vettore c(x) =
[c1 (x) c2 (x) . . . cm (x)]0 `e
1
,
σc =
1 − ρ0
mentre l’elasticit`
a di sostituzione tra una qualsiasi coppia di elementi del vettore x `e
σx =
1
.
1 − ρj
In pratica, attraverso le funzioni di tipo CES a pi`
u stadi `e possibile imporre un’elasticit`a di sostituzione fissa per le variabili appartenenti ad ogni singolo stadio che per`o sono diverse dalle elasticit`
a di
` ovvio che, aumentando il numero di stadi, la numerosit`a dei diversi valori
sostituzione in altri stadi. E
di elasticit`a di sostituzione aumenta in ragione esponenziale. Per questo motivo, la CES annidata
viene generalmente impiegata per 2 o al massimo 3 stadi, nonch´e per un numero esiguo di variabili
incluse nel vettore x (di solito n = 2 variabili).
Le propriet`a della CES a pi`
u stadi ricalcano sostanzialmente quelle della funzione di tipo CES elencate nella sezione 3.1.2, con le naturali complicazioni di tipo algebrico/computazionale che comporta
un crescente livello di generalit`
a della funzione; una caratteristica interessante `e che l’omogeneit`a della
funzione dipende dal numero degli stadi (S), infatti, applicando ad ogni stadio la propriet`a di cui alla
(53), risulta
y(t · x) = tK y(x),
(58)
dove
K=
S
Y
ks .
s=1
Dimostrazione:
Questa dimostrazione si basa sulla propriet`
a di omogeneit`
a delle funzioni di tipo CES; in relazione all’equazione (57) in
cui S = 2 si avrebbe perci`
o che c(t · x) = tk2 c(x), quindi
y(tk2 · x) = (tk2 )k1 y(x) = tk2 ·k1 y(x).
Generalizzando per S > 2, si ottiene perci`
o la (58).
——————————
Dalla (58) emerge inoltre che, se ks = 1 per ogni s = 1, 2, . . . , S, allora la funzione CES a pi`
u stadi `e
linearmente omogenea (K = 1).
12
Ovviamente `e possibile generalizzare la funzione annidando pi`
u di due funzioni di tipo CES.
34
3.2.2
Translogaritmica
La forma funzionale logaritmica trascendentale o translogaritmica, pi`
u comunemente denominata
translog risponde alla necessit`
a di definire una forma funzionale pi`
u generale e flessibile rispetto alle
funzioni di tipo CES, ma nello stesso tempo rappresenta una valida approssimazione per le stesse.
Essa perci`o si configura sostanzialmente come una formula di Taylor fino al secondo ordine per i logaritmi della variabile dipendente e delle variabili esplicative contenute all’interno del vettore x ed `e
caratterizzata dal fatto che tutte le elasticit`a parziali di sostituzione possono assumere valori tra loro
differenti. La sua forma analitica, formalizzata per la prima volta da Christiansen, Jorgenson e Lau
(1971, 1973), `e
1
˜ + b0 x
˜x
˜ 0 b,
y˜ = A˜ + a0 x
(59)
2
˜ = [ln x1 ln x2 . . . ln xn ]0 .
dove y˜ = ln y, A˜ = ln A e x
Esplicitando con le sommatorie si ottiene perci`o
ln y = ln A +
n
X
n
n
1 XX
bij ln xi ln xj ,
2
ai ln xi +
(60)
i=1 j=1
i=1
dove i coefficienti bij corrispondono all’elemento posto all’incrocio dell’i-esima riga e della j-esima
colonna della matrice simmetrica bb0 (quindi bij = bji per ogni i 6= j).
La funzione translog gode delle seguenti propriet`a:
1. la Cobb-Douglas rappresenta il caso particolare della translog in cui bij = 0;
2. la funzione y(x) `e omogenea di grado k solo sotto le condizioni
n
X
ai = k
bi = 10 b =
e
i=1
dove 10 = [1
1
...
n
X
bij = 0,
(61)
j=1
1] `e il vettore-somma;
Dimostrazione:
ln y(t · x)
=
ln A +
n
X
ai ln(t · xi ) +
i=1
=
ln A +
n
X
n
n
1 XX
bij ln(t · xi ) ln(t · xj )
2 i=1 j=1
ai [ln t + ln xi ] +
i=1
=
=
dove bi =
n
X
n
n
1 XX
bij [ln2 t + ln t(ln xi + ln xj ) + ln xi ln xj ]
2 i=1 j=1
i=1
(
)
n
n
n
n
n
n
X
X
X
X
1 XX
1
2
ln A + ln t
ai +
ai ln xi +
bij ln xi ln xj +
ln t
bi + 2 ln t
bi ln xi
2 i=1 j=1
2
i=1
i=1
i=1
i=1
ln A +
n
X
n
n
1 XX
bij [ln t + ln xi ][ln t + ln xj ]
2 i=1 j=1
ai [ln t + ln xi ] +
bij . Sotto le condizioni (61) risulta
j=1
ln y(t · x) = ln A + k ln t +
n
X
i=1
ai ln xi +
n
n
1 XX
bij ln xi ln xj
2 i=1 j=1
quindi
y(t · x) = tk A
n
Y
i=1
(
xai i exp
n
n
1 XX
bij ln xi ln xj
2 i=1 j=1
——————————
35
)
= tk y(x)
3. il segno delle derivate dipende dai parametri, infatti il gradiente `e
n
∂ y˜
˜
= a + bb0 x
∂˜
x
e
X
∂ y˜
= ai +
bij ln xj
∂x
˜i
⇒
∂ 2 y˜
= bb0
∂˜
x∂˜
x0
j=1
∂ 2 y˜
= bij ,
∂x
˜i ∂ x
˜j
⇒
quindi, in pratica, bij rappresenta l’elemento della matrice Hessiana posto all’incrocio tra l’iesima riga e la j-esima colonna. Affinch´e la funzione translog sia concava occorre che la matrice
bb0 sia almeno semidefinita negativa;
4. in alcuni testi di econometria come ad esempio Berndt (1991) oppure Takayama (1994), la forma
funzionale translog viene presentata direttamente attraveso una funzione di costo del tipo
ln C(w, y) = ln A +
n
X
n
ai ln wi +
i=1
+
n
1 XX
bij ln wi ln wj + ay ln y +
2
i=1 j=1
1
ayy ln2 y +
2
n
X
biy ln y ln wi
(62)
i=1
da quale `e possibile ricavare agevolmente due importanti propriet`a:
• La factor share relativa al fattore produttivo i-esimo `e lineare nei logaritmi di wi , quindi si
ha
n
X
Si = ai +
bij ln wj + biy ln y,
(63)
i=1
Dimostrazione:
Poich´e la factor share per l’i-esimo input `e
Si =
wi xi
,
C(w, y)
applicando il Lemma di Shephard risulta
Si =
∂ C(w, y)
1
wi .
C(w, y)
∂wi
Calcolando il differenziale di ln wi si ha
d ln wi =
∂ ln wi
dwi
dwi =
∂wi
wi
quindi il prezzo dell’i-esimo input `e esprimibile come
wi =
dwi
.
d ln wi
Sostituendo all’interno dell’equazione relativa alla factor share risulta
Si
=
=
=
=
≈
wi xi
C(w, y)
1
dwi ∂ C(w, y)
C(w, y) d ln wi
∂wi
∂ C(w, y)
1
C(w, y) d ln wi
∂ ln C(w, y) ∂ C(w, y)
∂C(w, y)
d ln wi
∂ ln C(w, y)
.
∂ ln wi
Nel caso dell’equazione (62) si ha quindi
36
n
Si =
X
∂ ln C(w, y)
= ai +
bij ln wj + biy ln y
∂ ln wi
i=1
——————————
• l’elasticit`
a di sostituzione varia a seconda della coppia delle variabili implicate, poich´e vale
σij = 1 +
bij
,
Si Sj
(64)
dove Si e Sj sono rispettivamente la factor share relativa all’i-esima e alla j-esima variabile;
Dimostrazione:
Si consideri l’elasticit`
a parziale di sostituzione calcolata in base alle funzioni di costo di cui alla (44), cio`e
σij =
Cij
C(w, y);
Ci Cj
applicando il Lemma di Shephard rispetto alla variabile i-esima (per la j-esima vale esattamente la stessa
relazione) si ha
∂ C(w, y)
C(w, y)
Ci =
= xi =
Si .
∂wi
wi
Per la funzione Cij risulta
Cij
∂ Ci
∂wj
∂ C(w, y)
∂
Si
wi
∂wj
∂ C(w, y) Si
∂Si C(w, y)
+
∂wj
wi
∂wj
wi
=
=
=
Poich´e dalla (63) risulta
∂Si
bij
=
, allora
∂wj
wj
Cij
=
=
=
Si
bij C(w, y)
+
wi
wj
wi
C(w, y)
Si wi wj
xj
+ bij
wi wj
wi C(w, y)
C(w, y)
[Si Sj + bij ] .
wi wj
xj
L’elasticit`
a di sostituzione vale perci`
o
σij
=
=
=
=
Cij
C(w, y)
Ci Cj
C(w, y)
C(w, y)
[Si Sj + bij ]
C(w, y)
C(w, y)
wi wj
Si
Sj
wi
wj
Si Sj + bij
Si Sj
bij
1+
Si Sj
——————————
5. funzione lineare nei logaritmi, quindi la translog pu`o essere comodamente utilizzata nell’ambito
di analisi econometriche basate sul modello lineare classico di regressione. Anche in questo, come
per la Cobb-Douglas, `e sufficiente assumere la validit`a delle ipotesi classiche sul termine di errore
del modello. Inoltre `e possibile condurre qualsivoglia test statistico sui parametri contenuti nel
vettore a e/o nella matrice bb0 .
37
3.2.3
Diewert
La forma funzionale Diewert `e anch’essa flessibile in quanto l’elasticit`a di sostituzione non `e la stessa
per tutte le coppie di input. La sua forma analitica `e
y=
" n n
XX
#k
√
(65)
bij xi xj
i=1 i=1
dove k `e l’elasticit`
a di scala e vale sempre la simmetria bij = bji .
La funzione di tipo Diewert gode delle seguenti propriet`a:
1. funzione omogenea di grado k, cio`e y(t · x) = tk y(x);
Dimostrazione:
y(t · x)
=
" n n
XX
#k
p
bij t · xi · t · xj
i=1 i=1
"
=
k
t
n X
n
X
√
#k
bij xi xj
i=1 i=1
=
tk y(x)
——————————
2. utilizzando anche in questo caso la funzione di costo13
C(w, y) = y
n X
n
X
√
bij wi wj ,
(66)
i=1 i=1
dal Lemma di Shephard si ottiene la funzione della domanda condizionata del fattore i-esimo
xi = y
n
X
j=1
r
bij
wj
.
wi
(67)
Quando i = j il rapporto tra i prezzi degli input `e pari a 1, quindi il coefficente bii `e costante
nell’espressione di xi .
3. l’elasticit`a di sostituzione `e variabile a seconda della coppia di input sulla quale `e calcolata ed `e
proporzionale al parametro bij ;
Dimostrazione:
Dato che Cij =
∂xi
y
= bij (wi wj )−1/2 , applicando il Lemma di Shephard si ottiene
∂wj
2
σij =
y · bij (wi wj )−1/2
Cij
C(w, y) =
C(w, y)
Ci Cj
2xi xj
——————————
13
Nell’equazione (66) il parametro relativo all’elasticit`
a di scala `e k = 1, scelta dettata da ragioni pratiche di semplicit`
ae
che non determina perdita di generalit`
a. Anche per la Diewert vale la separabilit`
a tale per cui risulta C(w, y) = Γ(w)y 1/k ,
infatti
"
#k
" n n
#k
n X
n
X
XX √
√
1/k
bij wi wj .
C(w, y) = y
bij wi wj = y
i=1 i=1
i=1 i=1
38
4. Quando bij = 0 per ∀ i 6= j si ottiene l’equazione della funzione di tipo Leontief dove la
tecnologia `e caratterizzata da proporzioni fisse e nell’impiego degli input. Per questo motivo la
funzione Diewert `e nota e anche col nome “Leontief generalizzata”. La funzione di costo di tipo
Leontief `e
n
X
C(w, y) = y
bii wi
(68)
i=1
La Leontief ha le seguenti caratteristiche:
• funzione omogenea di grado 1,
• la domanda condizionale del fattore i-esimo `e costante pari a
∂ C(w, y)
= ai y,
∂wi
xi =
• l’elasticit`
a di sostituzione `e nulla per qualsiasi coppia di input (xi , xj ), quindi tutti i fattori
produttivi sono perfettamente complementari. Ci`o accade perch´e l’isoquanto di produzione
mostra un punto angoloso.
Si considerino le equazioni (52) e (56) relative rispettivamente alla funzione di produzione e
quella di costo di tipo CES ottenute per l’auto-dualit`a; per semplificare la trattazione si ponga
k = 1, A = 1 e B = 1. Le equazioni sono perci`o
y=
" n
X
#1/ρ
βi xρi
"
e
C(w, y) = y
n
X
i=1
1
1−ρ
βi
− ρ
xi 1−ρ
#− 1−ρ
ρ
i=1
Quando ρ → −∞ si ottengono due risultati:
(a) dalla funzione di produzione si evince che y(x) = A · min{xi },
ρ
(b) la quantit`
a − → 1, quindi la funzione di costo tende ad una funzione del tipo (68), infatti
ρ
si ha
n
X
C(w, y) = y
wi .
i=1
Si noti inoltre il caso opposto, cio`e quando ρ → 1. La funzione di produzione `e lineare
y=
n
X
βi xi ,
i=1
mentre la funzione di costo diventa
C = min{wi }
Da queste considerazioni emerge che la Leontief non `e auto-duale.
39
Appendice: alcuni risultati utili
Proposizione 1 Data una generica matrice quadrata A di dimensione (n × n), il suo determinante
`e dato dalla seguente espressione:
|A| =
n
X
j=1
aij (−1)i+j |Aij |,
dove aij `e l’elemento posto all’incrocio dell’i-esima riga con la j-esima colonna, mentre |Aij | `e il
minore di A, cio`e il determinante della matrice di dimensione (n − 1) × (n − 1) ottenuta dalla matrice
A una volte tolte la i-esima riga e la j-esima colonna; la quantit`
a (−1)i+j |Aij | `e il complemento
algebrico relativo all’i-esima riga di A.
Le propriet`
a del determinante sono:
1. Se le colonne (righe) di A sono linearmente dipendenti il determinante `e nullo. In questo caso
A non ha rango colonna (riga) pieno, quindi non invertibile (matrice singolare);
2. Data una costante k risulta
|k · A| = k n |A|;
3. |A| = |A0 | dove A0 `e la matrice trasposta di A;
4. Data B conformabile ad A risulta
|AB| = |A| · |B|;
5. |In | = 1 per ∀ n, dove In `e la matrice identit`
a di dimensione n × n.
Proposizione 2 Data una generica matrice quadrata A di dimensione n × n, la formula per il calcolo
della sua inversa `e
1 ˜0
A−1 =
A,
|A|
˜ `e la matrice aggiunta di A: ciascun elemento posto all’incrocio dell’i-esima riga con la j-esima
dove A
colonna all’interno di tale matrice `e il complemento algebrico di A.
Si tenga presente che, quando si deve calcolare l’aggiunta trasposta di una matrice 2 × 2 basta
semplicemente scambiare di posizione gli elementi sulla diagonale principale e cambiare di segno gli
elementi extra-diagonali.
Da queste definizioni deriva che il generico elemento della matrice inversa di A `e dato dal rapporto:
γij =
|Aij |
.
|A|
Proposizione 3 Data la funzione di produzione f (x), dove x `e il vettore contente le quantit`
a utilizzate
relative a n distinti input, `e possibile costruire la matrice Hessiana bordata di cui alla (17). La
matrice G gode delle seguenti propriet`
a:
1. matrice quadrata di dimensione (n + 1) × (n + 1);
2. matrice partizionata nella quale le partizioni sono rispettivamente lo scalare 0, il gradiente f ed
il corrispondente vettore trasposto, la matrice delle derivate seconde H;
3. matrice simmetrica;
4. matrice semidefinita negativa per la concavit`
a di f (x).
Proposizione 4 Sia G la matrice Hessiana bordata di f (x) e si indichi con |Gii | il suo generico
minore principale, risulta che:
40
- se G `e definita positiva ⇒ |Gii | > 0 per ∀ i;
- se G `e definita negativa ⇒ i minori principali sono in successione alternata positivi e negativi.
In quest’ultimo caso |G| e |Gii | sono discordi per definizione, in quanto l’ordine delle righe di G non
`e rilevante: in termini economici questo risultato che l’ordine di enumerazione dei fattori produttivi
non ha rilevanza per il calcolo dei determinanti.
Proposizione 5 Per qualsiasi matrice quadrata A risulta:
n
X
j=1
aij (−1)i+j |Akj | = 0
dove aij `e l’elemento posto all’incrocio dell’i-esima riga con la j-esima colonna, mentre (−1)i+j |Akj |
`e il complemento algebrico relativo alla k-esima riga di A con k 6= i.
Riferimenti bibliografici
Allen, R. G. (1938). Mathematical analysis for economists. Mac Millan, Londra.
Berndt, E. R. (1991). The practice of econometrics. Addison-Wesley, Reading, Massachussets.
Cardani, A. M. (1988). Lezioni di teoria della produzione e della domanda. Edizioni Unicopli,
Milano.
Christiansen, L. R., Jorgenson, D. W. e Lau, L. J. (1971). Conjugate duality and the
transcendental logarithmic production function. Econometrica, 39(4): 225–256.
— (1973). Transcendental logarithmic production frontiers. Review of Economics and Statistics, 55(1):
28–45.
Diewert, E. W. (1982). Duality approaches to microeconomic theory. in K.J. Arrow e M.D.
Intriligator (eds.), “Handbook of mathematical economics”, vol. II, North Holland, Amsterdam.
Shephard, R. (1953). Cost and production functions. Princeton University Press, New York.
Takayama, A. (1994). Analytical methods in economics. Harvester Wheatsheaf, New York.
Uzawa, R. (1962). Production functions with constant elasticity of substitution. Review of Economic
Studies, 9: 291–299.
Vaglio, A. (2004). Matematica per economisti. Apogeo (Feltrinelli).
Varian, H. R. (1992). Microeconomic analysis (3rd edition). W.W. Norton & Company, New York.
Ringraziamenti
Un ringraziamento speciale va ad Edoardo Baldoni che ha avuto il tempo di scovare diversi errori e/o
imprecisioni in questo scritto, nonch´e la pazienza di segnalarmeli puntualmente.
41
© Copyright 2026 Paperzz