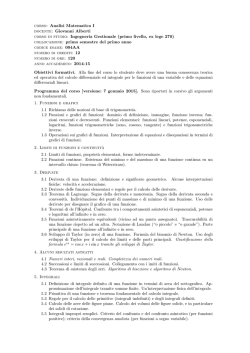
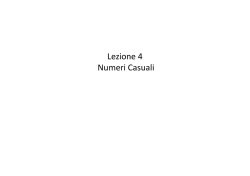
Equazioni differenziali del secondo ordine a coefficienti costanti. Mauro Saita. Aprile 2014. Indice 1 Equazioni lineari del secondo ordine a coefficienti costanti 1 1.1 Oscillazioni forzate e risonanza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.2 Ricerca dell’integrale particolare: metodo di somiglianza . . . . . . . . . . . . . . . . . . . 6 2 Sistemi di equazioni differenziali 7 3 Soluzioni 8 1 1 Equazioni lineari del secondo ordine a coefficienti costanti Esercizio 1.1. Si denoti con C ∞ (R) lo spazio vettoriale delle funzioni R −→ R lisce (cio`e con derivata di ogni ordine). Fissati a, b, c ∈ R, si consideri l’operatore cos`ı definito P C ∞ (R) −→ C ∞ (R), P (f ) = af + bf + cf per ogni f in C ∞ (R). a) Dimostrare che l’operatore P `e lineare. b) Dimostrare che l’insieme S delle funzioni f in C ∞ (R) che sono soluzioni dell’equazione omogenea ay + by + cy = 0 `e un sottospazio vettoriale di C ∞ (R). c) Sia g una funzione continua (in R) e f0 una soluzione particolare dell’equazione P (f ) = g, cio`e af0 + bf0 + cf0 = g (1.1) Dimostrare che l’insieme S delle soluzioni dell’equazione P f = g `e S = Ker P + f0 1 Per segnalazioni di refusi o errori scrivete per favore a: [email protected] 2014.tex’ 1 Nome del file .tex: ‘Esercizi-edo-1- R Esercizio 1.2. Si consideri l’equazione differenziale lineare (omogenea) y − 9y + 14y = 0 (1.2) a) Scrivere l’integrale generale dell’equazione (1.2). b) Risolvere il problema ai valori iniziali: ⎧ ⎨ y − 9y + 14y = 0 y(0) = 2 ⎩ y (0) = 1 (1.3) Quante sono le soluzioni del problema (1.3)? R Esercizio 1.3. Determinare le soluzioni dei seguenti problemi di Cauchy: a) y + y − 2y = 0, y(0) = 1, y (0) = 0 b) 2y + 5y − 3y = 0, y(0) = 1, y (0) = 2 c) y + 4y + 5y = 0, y(0) = 2, y (0) = 2 R Esercizio 1.4. Si consideri l’equazione differenziale lineare del secondo ordine y − 7y + 10y = ex (1.4) a) Determinare l’integrale generale dell’equazione (1.4). 17 9 b) Trovare la soluzione y(x) di (1.4) soddisfacente le condizioni: y(0) = , y (0) = . 4 4 R Esercizio 1.5. Trovare l’integrale generale delle seguenti equazioni differenziali del secondo ordine: a) y + 9y = xex b) y − y = sin 2x c) y + 3y − 4y = x2 − x + 3 R 2 Esercizio 1.6. Trovare l’integrale generale delle seguenti equazioni differenziali del secondo ordine: a) y + 4y = sin x b) y + 4y = sin 2x c) y + 4y = sin x + sin 2x R Esercizio 1.7. Trovare l’ntegrale generale delle seguenti equazioni differenziali del secondo ordine 1) 2y + 5y − 3y = e−3x 2) 2y + 5y − 3y = sin x 3) 2y + 5y − 3y = e−3x + sin x R 1.1 Oscillazioni forzate e risonanza L’equazione dell’oscillatore forzato `e (1.5) mx + kx = F0 cos ωt con m, k > 0 (massa e costante elastica). La costante ω0 = k/m `e la frequenza dell’oscillatore non smorzato, mentre ω `e la frequenza della forza esterna. Si devono distinguere due casi. Primo caso: ω0 = ω. Una soluzione particolare dell’equazione 1.5 pu` o essere trovata provando con la funzione C cos ωt. Sostituendo nell’equazione 1.5, si trova la soluzione particolare F0 cos ωt − ω2) m(ω02 La soluzione generale `e allora x(t) = A cos ω0 t + B sin ω0 t + F0 cos ωt − ω2) m(ω02 (1.6) Le costanti A e B sono fissate dalle condizioni iniziali. Ad esempio, la soluzione che soddisfa le condizioni iniziali x(0) = 0 e x (0) = 0 `e x(t) = M (cos ωt − cos ω0 t) m(ω02 − ω 2 ) (1.7) Ricordando le formule di prostaferesi, possiamo scrivere quest’ultima soluzione come x(t) = ω0 − ω ω0 + ω 2M sin( t) sin( t) 2 2 2 2 m(ω0 − ω ) 3 (1.8) x(t)= sin(t)sin(21t) 1 0.8 0.6 0.4 0.2 0 −0.2 −0.4 −0.6 −0.8 −1 0 1 2 3 4 5 6 7 Figura 1: Battimenti. Quindi x(t) `e il prodotto di due funzioni, una delle quali oscilla pi´ u rapidamente dell’altra. Si tratta del fenomeno dei battimenti. Secondo caso: ω0 = ω. Il caso in cui la frequenza propria ω0 del sistema sia uguale alla frequenza ω della forza esterna, `e qualitativamente diverso dal precedente. In questo caso la soluzione generale del sistema `e x(t) = A cos ω0 t + B sin ω0 t + F0 t sin ω0 t 2mω0 Per la presenza del termine t sin ω0 t, le oscillazioni del sistema crescono al crescere di t. Questo fenomeno si chiama risonanza. Risonanza: x=K t sin(t) 2 1.5 1 0.5 0 −0.5 −1 −1.5 −2 −2.5 0 1 2 3 4 5 6 7 Figura 2: Risonanza. Esercizio 1.8. Scrivere la soluzione generale dell’equazione x + 4x = cos t nella forma 1.6. Scrivere la soluzione soddisfacente le condizioni iniziali x(0) = 0, x (0) = 0 nella forma 1.8. 4 Esercizio 1.9. Risolvere l’equazione x + x = cos t. Trovare la soluzione che soddisfa le condizioni iniziali x(0) = 2, x (0) = 2. L’equazione descrive un fenomeno di risonanza? 5 1.2 Ricerca dell’integrale particolare: metodo di somiglianza Si consideri l’equazione differenziale ay + by + cy = f (t) (1.9) e sia P (λ) = aλ2 + bλ + c = 0 la sua equazione caratteristica. Per trovare un integrale particolare yp di (1.9) conviene ricercare yp tra ben determinate famiglie di funzioni che variano al variare del termine f . I casi pi` u frequenti sono i seguenti: 1. f (t) = p(t) = polinomio di grado n ⎧ ⎨ q(t) yp (t) = t q(t) ⎩ 2 t q(t) se λ = 0 non `e radice di P (λ) se λ = 0 `e radice semplice di P (λ) se λ = 0 `e radice doppia di P (λ) dove q(t) = an tn + an−1 tn−1 + · · · + a1 t + a0 `e un polinomio a coefficienti reali di grado n. 2. f (t) = Aeαt ⎧ αt ⎨ ke yp (t) = kteαt ⎩ 2 αt kt e f (t) = A sin(ωt) 3. f (t) = A cos(ωt), yp (t) = 4. f (t) = Aeαt cos(ωt), yp (t) = 5. f (t) = eαt p(t), se λ = α non `e radice di P (λ) se λ = α `e radice semplice di P (λ) se λ = α `e radice doppia di P (λ) c1 cos(ωt) + c2 sin(ωt) c1 t cos(ωt) + c2 t sin(ωt) se λ = iω non `e radice di P (λ) se λ = iω `e radice di P (λ) f (t) = Aeαt sin(ωt) c1 eαt cos(ωt) + c2 eαt sin(ωt) c1 teαt cos(ωt) + c2 teαt sin(ωt) se λ = α + iω non `e radice di P (λ) se λ = α + iω `e radice di P (λ) p(t) = polinomio di grado n ⎧ αt ⎨ e q(t) teαt q(t) yp (t) = ⎩ 2 αt t e q(t) se λ = α non `e radice di P (λ) se λ = α `e radice semplice di P (λ) se λ = α `e radice doppia di P (λ) dove q(t) = an tn + an−1 tn−1 + · · · + a1 t + a0 `e un polinomio a coefficienti reali di grado n. 6. f (t) = f1 (t) + f2 (t) In questo caso bisogna ricercare un integrale particolare y1 (t) di ay + by + cy = f1 (t) e un integrale particolare y2 (t) di ay + by + cy = f2 (t). Allora un integrale particolare yp (t) di ay + by + cy = f1 (t) + f2 (t) `e yp (t) = y1 (t) + y2 (t) (questo fatto `e un’immediata conseguenza della linearit` a dell’equazione differenziale). 6 2 Sistemi di equazioni differenziali Esercizio 2.1. Si consideri il sistema di equazioni differenziali x = −x + 3y x+y y = 1. Se u1 : R −→ R2 , u2 : R −→ R2 sono due soluzioni del sistema, la funzione u1 + u2 : R −→ R2 `e anch’essa soluzione del sistema? Giustificare la risposta. 2. Trovare la soluzione generale del sistema. 3. Determinare la soluzione che all’istante t = 0 passa per il punto (4, 0). R Esercizio 2.2. Scrivere la soluzione generale del sistema di equazioni differenziali: x = x − 2y y = 5x + 3y R 7 3 Soluzioni Esercizio 1.1 a) P `e additivo: P (f + g) = a(f + g) + b(f + g) + c(f + g) = a(f + g ) + b(f + g ) + c(f + g) = (af + bf + cf ) + (ag + bg + cg) = P (f ) + P (g) per ogni f, g ∈ C ∞ (R). P `e omogeneo: P (λf ) = a(λf ) + b(λf ) + c(λf ) = λaf + λbf + λcf = λ(af + bf + cf ) = λP (f ) per ogni f ∈ C ∞ (R), per ogni λ ∈ R. b) c) 1. Si supponga che y ∈ Ker P + f0 . Questo significa che y = h + f0 , per un’opportuna funzione h ∈ Ker P . Allora P (y) = P (h + f0 ) = P (h) + P (f0 ) = 0 + g = g e quindi y `e soluzione dell’equazione P (f ) = g. 2. Si supponga che y soddisfi l’equazione P (f ) = g, cio`e P (y) = g (3.1) P (y − f0 ) = P (y) − P (f0 ) = g − g = 0 (3.2) Poich´e per ipotesi anche P (f0 ) = g, si ha Quindi y − f0 sta in Ker P . Segue che y appartiene a (Ker P ) + f0 . Esercizio 1.2 Integrale generale dell’equazione omogenea: y(t) = Ae2t + Be7t , A, B ∈ R. L’unica 3 2t 7t soluzione del problema di Cauchy `e y(t) = 13 5 e − 5 Be . Esercizio 1.3 8 a) L’integrale generale: y(t) = Ae−2t + Bet , A, B ∈ R. La soluzione del problema di Cauchy `e 1 2 y(t) = e−2t + et 3 3 1 b) L’integrale generale: y(t) = Ae−3t + Be 2 t , A, B ∈ R. La soluzione del problema di Cauchy `e 10 1 3 y(t) = − e−3t + e 2 t 7 7 c) L’integrale generale: y(t) = (A cos t + B sin t)e−2t , A, B ∈ R. La soluzione del problema di Cauchy `e y(t) = (2 cos t + 6 sin t)e−2t Esercizio 1.4 a) Integrale generale: y(x) = Ae2x + Be5x + 14 ex b) Soluzione del problema di Cauchy: y(x) = 2e2x + 14 ex Esercizio 1.5 a) L’integrale particolare va ricercato tra le funzioni del tipo yp (x) = (αx + β)ex . L’integrale generale `e 1 1 x− ex y(x) = A cos 3x + B sin 3x + 10 50 b) L’integrale particolare va ricercato tra le funzioni del tipo yp (x) = α sin 2x + β cos 2x. L’integrale generale `e 1 y(x) = Aex + Be−x − sin 2x 5 c) L’integrale particolare va ricercato tra le funzioni del tipo yp (x) = αx2 +βx+γ. L’integrale generale `e 31 1 1 y(x) = Aex + Be−4x − x2 − x − 4 8 32 Esercizio 1.6 a) y(x) = A cos 2x + B sin 2x + 1 3 sin x. b) y(x) = A cos 2x + B sin 2x − 14 x cos 2x. c) Per trovare un integrale particolare dell’equazione differenziale conviene usare il principio di sovrapposizione: se f1 `e un integrale particolare di P (f ) = g e f2 `e un integrale particolare di P (f ) = g allora f1 + f2 `e un integrale di P (f ) = g + g. In altre parole, se P (f1 ) = g e P (f2 ) = g 9 allora P (f1 + f2 ) = g + g In questo caso f1 (x) = 13 sin x (caso a) e f2 (x) = − 14 x cos 2x (caso b). Quindi un integrale particolare di y + 4y = sin x + sin 2x `e yp (x) = 13 sin x − 14 x cos 2x. L’inegrale generale `e y(x) = A cos 2x + B sin 2x + 1 1 sin x − x cos 2x 3 4 Esercizio 1.7 L’equazione differenziale omogenea `e la stessa per tutti e tre i casi, cio`e 2y +5y −3y = 0. L’equazione caratteristica `e 2λ2 + 5λ − 3 = 0, le cui soluzioni sono λ = −3 e λ = 12 . L’integrale generale dell’equazione omogenea `e 1 y0 (x) = Ae−3x + Be 2 x con A, B ∈ R. 1. Un integrale particolare yp (x) dell’equazione differenziale 2y + 5y − 3y = e−3x (3.3) va ricercato tra le funzioni del tipo yp (x) = kxe−3x , k ∈ R (metodo di somiglianza). Si ottiene yp (x) = e−3x (k − 3kx) (3.4) yp (x) (3.5) −3x = e (9kx − 6k) Sostituendo (3.4) e (3.5) in (3.3) si ricava: k = − 17 . Quindi l’integrale generale `e 1 1 y(x) = Ae−3x + Be 2 x − xe−3x 7 con A, B ∈ R. 2. Un integrale particolare yp (x) dell’equazione differenziale 2y + 5y − 3y = sin x (3.6) va ricercato tra le funzioni del tipo yp (x) = k1 cos x + k2 sin x, k1 , k2 ∈ R (metodo di somiglianza). Si ottiene yp (x) = − 1 1 cos x − sin x 10 10 Quindi l’integrale generale di (3.6) `e 1 y(x) = Ae−3x + Be 2 x − 1 1 cos x − sin x 10 10 3. Un integrale particolare yp (x) dell’equazione differenziale 2y + 5y − 3y = e−3x + sin x 10 (3.7) `e 1 1 1 yp (x) = − xe−3x − cos x − sin x 7 10 10 Pertanto l’integrale generale di (3.7) `e 1 1 1 1 cos x − sin x y(x) = Ae−3x + Be 2 x − xe−3x − 7 10 10 Esercizio 2.1 1. Il sistema in forma matriciale assume la forma u = Au −1 3 dove A = 1 1 (3.8) . Se u1 : R −→ R2 e u2 : R −→ R2 sono due soluzioni del sistema si ha u1 = Au1 , u2 = Au2 Segue che (u1 + u2 ) = u1 + u2 = Au1 + Au2 = A(u1 + u2 ) Pertanto, u1 + u2 `e una soluzione del sistema. Si ricordi che l’insieme delle soluzioni di un qualsiasi sistema differenziale di tipo (3.8) costituisce uno spazio vettoriale. 2. Gli autovalori della matrice A sono le soluzioni dell’equazione caratteristica det(A − λI) = λ2 − 4 = 0 ovvero λ1 = 2, λ2 = −2. Gli autovettori relativi all’autovalore λ1 = 2 sono le soluzioni del sistema omogeneo (A − 2I)u = 0, cio`e V2 = {(x, y) = (1, 1)t, t ∈ R} mentre gli autovettori relativi all’autovalore λ2 = −2 sono le soluzioni del sistema omogeneo (A + 2I)u = 0, ossia V−2 = {(x, y) = (−3, 1)t, t ∈ R} La soluzione generale del sistema `e 1 −2t −3 A, B ∈ R u(t) = Ae + Be 1 1 2t 11 3. La soluzione che all’istante t = 0 passa per il punto (4, 0) si trova risolvendo il sistema lineare A − 3B = 4 A+B = 0 la cui soluzione `e A = B = 1. La funzione u : R −→ R2 che soddisfa le condizioni iniziali assegnate `e 2t 1 −2t −3 u(t) = e + e 1 1 Il sistema, in forma matriciale, assume la forma X = AX. Gli autovalori di A = Esercizio 2.2 1 −2 (matrice del sistema) sono le radici dell’equazione caratteristica 5 3 det(A − λI) = λ2 − 4λ + 13 = 0 ossia λ1 = 2 + 3i, λ2 = 2 − 3i. Scelto uno di questi due autovalori, per esempio λ1 = 2 + 3i, bisogna trovare un corrispondente autovettore ovvero una soluzione non nulla del sistema lineare (A − λ1 I)X = 0 (3.9) Il sistema (3.9) (−1 − 3i)x − 2y = 0 5x + (1 − 3i)y = 0 `e formato da due equazioni equivalenti; una soluzione non nulla `e, per esempio, 2 v1 = −1 − 3i La funzione a valori complessi (2+3i)t e 2 −1 − 3i (3.10) `e una soluzione del sistema X = AX. La parte reale e la parte immaginaria di tale soluzione a valori complessi sono soluzioni reali, linearmente indipendenti, dello stesso sistema X = AX. Da (3.10) si ottiene 2t e 2(cos 3t + i sin 3t) (−1 − 3i)(cos 3t + i sin 3t) = e2t 2 cos 3t (− cos 3t + 3 sin 3t) 2 sin 3t 2t + ie −3 cos 3t − sin 3t Quindi la soluzione generale del sistema `e 2e2t cos 3t A 2t e (− cos 3t + 3 sin 3t) +B dove A, B sono costanti reali arbitrarie. 12 2e2t sin 3t 2t e (−3 cos 3t − sin 3t)
© Copyright 2026 Paperzz