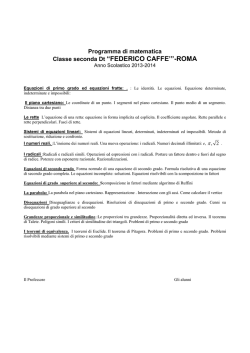
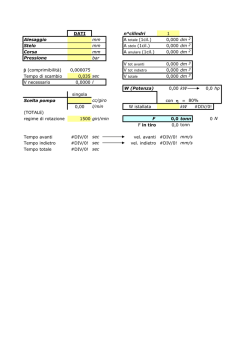
Capitolo II MECCANICA DEI MEZZI POROSI Frequentemente due o più sistemi fisici interagiscono fra loro, senza che sia possibile la soluzione indipendente di un sistema dalla simultanea risoluzione degli altri. Questi sistemi sono detti propriamente accoppiati e la loro unione può essere più o meno debole secondo il grado d’interazione. Un’ottima definizione di sistema accoppiato può essere la seguente[14]: I sistemi e le formulazioni accoppiate sono quelle applicabili a domini multipli e variabili dipendenti che solitamente descrivono differenti fenomeni fisici e nei quali: a) nessun dominio può essere risolto separatamente dall’altro; b) nessun insieme di variabili dipendenti può essere esplicitamente eliminato nelle equazioni differenziali. Solitamente i problemi accoppiati sono distinti in due categorie: 1° Classe. Questa classe contiene problemi nei quali l’accoppiamento avviene solamente al contorno. 2° Classe. Ingloba quei sistemi nei quali i vari domini si sovrappongono ( parzialmente o totalmente). La Meccanica dei Mezzi Porosi rappresenta un tipico esempio di problema accoppiato di seconda classe nel quale il flusso fluido filtrante interagisce con lo scheletro solido ( vedi Fig.II.2 ). In questo Capitolo si sviluppano le equazioni differenziali caratterizzanti il comportamento meccanico di questa tipologia di mezzi, considerando le forze d’inerzia, i flussi fluidi in forma accoppiata con la deformazione dello scheletro solido e Capitolo II i cambiamenti di fase dovuti a scambi termici o a variazione di pressione, come sviluppato da Schrefler [18] e Lewis & Schrefler [16]. L’accoppiamento fra le fasi è realizzato considerando l’effetto che la variazione delle variabili di stato di ciascuna fase determina istante per istante sulle altre fasi presenti. Fig. II.1. Problema Accoppiato di 1° Classe – interazione fluido/struttura al contorno. Fig. II.2. Problema Accoppiato di 2° Classe – filtrazione attraverso un mezzo poroso I mezzi multifase sono qui considerati come costituiti da corpi continui (singola fase) che si sovrappongono ed interagiscono fra loro; all’interno di questo modello sono due le teorie che ne descrivono il comportamento meccanico e in pratica: a) la teoria delle miscele, estesa introducendo il concetto di frazione di volume di ciascuna fase (Bowen [19-20]; De Boer et al. [38]), oppure la teoria ibrida delle miscele (Hassanizadeh & Gray [21-23]; Schrefler [18]); b) la teoria classica di Biot per i mezzi saturi (Biot [24-29]), estesa al campo dinamico da Zienkiewicz & Shiomi [30] e a quello parzialmente saturo da Zienkiewicz et al. [31]. 8 Meccanica dei mezzi porosi La teoria delle miscele, estesa dall’introduzione del parametro strutturale frazione di volume, discende direttamente dagli assiomi della teoria delle miscele (Bowen [32]) basata sulla classica trattazione del continuo di Truesdell & Toupin [33]. Essa suppone a priori che tutti i componenti del sistema multifase siano simultaneamente presenti in ciascun punto di tutto lo spazio occupato dal mezzo poroso (continuo a domini sovrapposti). Il comportamento di ciascuna fase e la loro interazione sono quindi descritti da un campo di variabili continue. Come la meccanica classica del continuo e la teoria delle miscele, anche la teoria delle miscele per i mezzi porosi è una teoria di tipo macroscopico, in cui la scala di riferimento è quella macroscopica, essendo interessata solo alla distribuzione continua dei costituenti nello spazio. A differenza della teoria delle miscele, la teoria ibrida delle miscele è definita a partire dalla scala microscopica. Definito a questo livello un elemento di volume dv rappresentativo del mezzo multifase (R.E.V.) (Fig.II.3.) nell’intorno di un punto qualsiasi, si osserva che le varie fasi sono distinte, occupando solo una parte di questo dominio, e a contatto fra loro. Ad ogni fase sono associate le usuali variabili di campo (temperatura, pressione, ecc.); queste grandezze sono continue all’interno di ciascuna fase ma sono discontinue all’interno del dominio di riferimento dv e quindi anche nell’intero dominio del mezzo multifase in cui sono diffuse. Attraverso l’uso di teoremi di media tale teoria permette di passare alla scala macroscopica, ottenendo un sostituto continuo del mezzo multifase in cui le varie fasi sono state mediate o distribuite con continuità su tutto il dominio e sono fra loro sovrapposte. Le leggi di bilancio della meccanica (equazioni d’equilibrio, di continuità e di conservazione) sono perciò integrate (mediate) sull’elemento locale rappresentativo del dominio microscopico, su tutto quello macroscopico e poi vengono localizzate. La teoria ibrida delle miscele costruisce perciò un ponte fra la struttura a livello microscopico e quella a livello macroscopico, essendo quest’ultimo il dominio di naturale interesse della meccanica del continuo, giacché è molto difficile risolvere le equazioni di bilancio a livello microscopico a causa della complessa geometria del mezzo poroso. 9 Capitolo II Fig. II.3. Elemento rappresentativo di volume (R.E.V.) di un mezzo poroso composto da una fase solida e due fluide. Con tale teoria è possibile ottenere sia le equazioni della teoria delle miscele (de Boer et al. [38]; Lewis & Schrefler [16]), che quelle della teoria di Biot introducendo particolari ipotesi (Lewis & Schrefler [16]). Corrispondentemente anche con la teoria delle miscele è possibile ricavare le equazioni della teoria di Biot (de Boer et al. [38]). A conferma della similitudine esistente nella forma finale delle equazioni di bilancio del comportamento meccanico dei mezzi porosi si osserva che, utilizzando la teoria delle miscele per la simulazione numerica della localizzazione di suoli saturi, Ehlers & Volk [34] hanno confermato i risultati trovati da Schrefler et al. [35], i quali hanno invece utilizzato un modello ottenuto applicando la teoria ibrida delle miscele. La teoria di Biot è una teoria di tipo fenomenologico che generalizza la teoria monodimensionale della consolidazione di Terzaghi. 10 Meccanica dei mezzi porosi II.1 Cenni alla teoria ibrida delle miscele Prima di enunciare i principi su cui è basata questa teoria, è utile introdurre le seguenti definizioni concernenti la scala a cui è possibile studiare il continuo multifase: a) livello microscopico. A questo livello il mezzo poroso è non omogeneo. La scala di non-omogeneità è dell’ordine di grandezza della dimensione dei vuoti o del grano solido (d). Le variabili di campo microscopiche sono generalmente non misurabili: solo i loro valori medi sono tali. La descrizione matematica del comportamento del mezzo poroso a questo livello non è praticabile sia perché le grandezze non sono direttamente misurabili, sia perché la descrizione di ciò che accade in ciascun punto occupato dal mezzo poroso è estremamente onerosa da realizzare. b) livello macroscopico. E’ questo il livello d’interesse della meccanica del continuo in quanto è qui che si sostituisce il reale sistema multifase con un modello nel quale ogni fase sia presente nell’intero dominio. Ciò significa che in ciascun punto del dominio tutte le fasi sono supposte essere contemporaneamente presenti (continui che si sovrappongono). Le non omogeneità possono ancora essere presenti e sono costituite dagli strati. L’ordine di grandezza di tali non omogeneità è quella dell’intero dominio (L). A differenza delle variabili di campo microscopiche, quelle macroscopiche sono misurabili in prove di laboratorio o in sito. c) livello megascopico. E’ un livello simile al precedente, in cui però le nonomogeneità sono eliminate utilizzando tecniche di media oppure mediate sulla terza dimensione, come nel caso di modelli 2-D per lo studio di problemi di subsidenza (Simoni & Schrefler [36]). Si consideri un mezzo multifase che occupa il volume totale V e il cui contorno sia A. I costituenti π = 1,2,3....k occupino il volume parziale Vπ. Ciascun punto del mezzo è considerato essere il centro di un elemento di volume rappresentativo REV indicato anche come elemento medio di volume dv (Fig. II.3). E’ questo una cella unitaria su cui saranno mediate tutte le grandezze fisiche ed è rappresentativo del mezzo poroso nell’intorno di un punto. 11 Capitolo II La posizione del centro di questo volume elementare è descritta dal vettore posizione x rispetto un sistema di riferimento cartesiano, mentre r indica la posizione di un microscopico elemento di volume dvm (Fig. II.3). Con ξ s’indica la coordinata locale che ha la sua origine in x. Definita la funzione di distribuzione di fase γπ(r,t) γ (r , t ) = π 1 per r ∈ dv π 0 per r ∈ dv α α ≠ π (II.1.1) il volume occupato dalla fase π all’interno del REV, detto anche elemento di volume di fase, è fornito dal seguente integrale dv π (x, t ) = γ π (r , t ) dv m (II.1.2) dv dove l’integrazione è eseguita rispetto il sistema di coordinate locali ξ e dove dvm è l’elemento di volume microscopico della fase π. In modo del tutto simile è possibile definire all’interno del REV l’area daπ occupata dal costituente π o area di fase elementare da π (x, t ) = γ π (r , t ) da m (II.1.3) da dove dam è l’elemento d’area microscopico. La conoscenza dell’elemento di volume di fase dvπ permette l’introduzione del concetto di frazione di volume ηπ, che è di fondamentale importanza nella meccanica dei mezzi multifase in quanto è la grandezza base necessaria alla descrizione dell’interazione fra le fasi. La frazione di volume ηπ è definita dalla seguente: dv π 1 η ( x, t ) = = γ π (r , t ) dv m dv dv dv π 12 (II.1.4) Meccanica dei mezzi porosi Da questa definizione si ricava facilmente che la somma delle frazioni di volume delle fasi presenti nel mezzo multifase è unitaria. k ηπ = 1 (II.1.5) π =1 L’introduzione di questi operatori ci fa intuire come a livello macroscopico un sostituto di continuo riempirà l’intero dominio simultaneamente, sostituendo i fluidi ed il solido reale che riempiono invece solo una parte di esso. Questo sostituto di continuo avrà una ridotta densità grazie alla frazione di volume ηπ. In ciò che segue saranno introdotte delle quantità medie ottenute dall’integrazione di quantità microscopiche sul volume elementare dv o sull’area elementare da del REV. Le quantità medie così ottenute dovranno essere indipendenti dalla dimensione del volume medio dv ed essere grandezze continue nello spazio e nel tempo (Hassanizadeh & Gray [21]). Affinché questi requisiti siano soddisfatti, il volume elementare REV deve: a) essere abbastanza piccolo da essere considerato infinitesimo, nel senso che le derivate parziali che compaiono nelle equazioni di bilancio devono avere senso matematico; b) essere abbastanza grande rispetto alle eterogeneità del materiale da fornire quantità medie senza fluttuazioni (Fig. II.4). La dimensione di tale cella dipenderà perciò anche dal tipo di continuo che deve rappresentare. . Fig. II.4. Valore medio della grandezza ζ rispetto alla dimensione dv 13 Capitolo II Per ottenere valori medi significativi, la lunghezza caratteristica l del volume medio REV deve soddisfare la disuguaglianza d << l << L (II.1.6) Alcuni tipici valori di l sono (Lemaitre & Chaboche [37]) metalli 0.5 mm plastica 1 mm legno 10 mm calcestruzzo 100 mm Per le argille fini si può pensare ad un valore vicino a quello indicato per i metalli, mentre per le sabbie ad un valore che va da quello per il legno a quello per il calcestruzzo, secondo la granulometria. Attraverso la definizione d’opportuni operatori di media, applicati alle funzioni che rappresentano le microscopiche è possibile definire tutte le variabili di stato del mezzo multifase; in particolare attraverso l’operatore di media sulla massa è possibile definire la velocità media, le forze di massa, l’energia interna, il calore scambiato con l’esterno, l’entropia interna, l’entropia scambiata con l’esterno e la produzione totale d’entropia. Attraverso l’operatore di media sull’area è invece possibile definire il flusso termico, il tensore delle tensioni, il flusso di calore e il flusso d’entropia. Si riporta in seguito l’equazione di bilancio a livello macroscopico, riferita alla generica variabile termodinamica ψ, da cui poi si ottengono le classiche equazioni di conservazione della massa, della quantità di moto e del momento della quantità di moto e l’equazione d’equilibrio energetico (de Boer et al. [38]; Hassanizadeh & Gray [21-23]; Schrefler [18]; Lewis & Schrefler [16]). L’equazione di bilancio a livello macroscopico riferita alla generica grandezza ψ è ottenuta a partire da quella scritta a livello microscopico moltiplicata per la funzione distribuzione di fase γπ(r,t) , integrando tale prodotto prima sul volume elementare dv del REV e poi sul volume totale V di mezzo poroso. 14 Meccanica dei mezzi porosi Questo modo di operare fornisce una equazione di bilancio macroscopica di carattere generale dalla quale è ottenibile per localizzazione la seguente forma differenziale: [ ∂ ρ π ψπ ∂t ] + div[ ρ π ] v π ψ π − div i π − ρ π [b π ] + e π (ρψ ) + I π = ρ π G π (II.1.7) In quest’ultima equazione compaiono due termini che esprimono uno l’interazione meccanica Iπ fra le fasi π e l’altro la variazione di massa eπ della fase π dovuto al cambiamento di stato, Iπ = 1 ρ π dv α ≠ π da πα e π (ρψ ) = 1 n πα ⋅ i da m ρψ ( w − r ) ⋅ n πα da m ρ π dv α ≠ π da πα (II.1.8) (II.1.9) 15 Capitolo II II.2 Equazioni di bilancio macroscopiche In questo paragrafo si derivano le equazioni di conservazione della massa, della quantità di moto e del suo momento e l’equazione di bilancio di energia, a partire dalla generale equazione di bilancio macroscopica (II.1.7) ricavata nel paragrafo precedente. Si impongono le seguenti ipotesi a riguardo del mezzo poroso: 1. lo scheletro solido del mezzo multifase è deformabile; 2. tutte le fasi sono in contatto con lo scheletro solido; 3. i costituenti sono supposti immiscibili ad eccezione dell’aria secca e del vapore acqueo e chimicamente non reagenti e sono indicati con l’apice (s) per lo scheletro solido, (w) per la fase acquosa, (g) per la fase gassosa, costituita dalla miscela di gas perfetti di aria secca (ga) e di vapore acqueo (gw); 4. si suppone esista equilibrio termodinamico fra le fasi presenti in un punto e in altre parole che tutte le fasi presenti nell’intorno infinitesimo di un punto abbiano la stessa temperatura; 5. sono possibili scambi di calore fra le fasi fra punti a temperatura diversa e flussi d’acqua, vapore acqueo e aria secca. Si tiene quindi conto della conduzione e convenzione di calore, della diffusione di vapore, dei flussi fluidi dovuti ai gradienti di pressione ed agli effetti capillari e dei cambiamenti di fase per l’acqua (evaporazione e condensazione) contenuta nei pori; 6. i costituenti sono comprimibili; 7. i costituenti sono non polari. Si assume inoltre la convenzione che lo stato di tensione per lo scheletro solido è positivo quando di trazione, mentre la pressione dei fluidi è positiva quando di compressione. Per lo sviluppo delle equazioni di bilancio macroscopiche è necessario la descrizione della cinematica del mezzo multifase. 16 Meccanica dei mezzi porosi II.2.1. Cinematica e deformazione del mezzo multifase Com’è già stato introdotto, il mezzo multifase può essere descritto come la sovrapposizione delle fasi π, cioè nella configurazione attuale ogni punto spaziale x è simultaneamente occupato da punti materiali Xπ di tutte le fasi. Il moto di ciascun punto è in ogni modo descritto indipendentemente. Figura II.5. Configurazione iniziale e deformata per il mezzo multifase. Come si può osservare dalla Fig. II.5, la posizione occupata dal generico punto P nella configurazione deformata individuata dal vettore posizione xπ di coordinate (x1, x2, x3) si ottiene a partire dalla sua posizione nella configurazione iniziale P0 individuata dal vettore posizione Xπ di coordinate (X1, X2, X3) una volta noto il vettore spostamento uπ xπ = Xπ + uπ (II.2.1) In questa sede si considera che la configurazione iniziale e quella deformata abbiano lo stesso sistema di riferimento, analogamente a quanto esposto per il classico continuo monofase in (Malvern [58]); per la trattazione generale si vedano, ad esempio, (Marsden-Hughes [39], Narasimhan [40], Truesdell & Noll [33]) e l’appendice dello stesso (Malvern [58]). Si è inoltre utilizzata la convenzione che indica in grassetto i tensori a partire dal primo ordine (mentre gli scalari sono indicati in corsivo) e con lettera maiuscola le 17 Capitolo II grandezze che si riferiscono alla configurazione di riferimento, con lettera minuscola le grandezze che si riferiscono alla configurazione deformata (Truesdell & Noll [33]). Due sono le descrizioni prevalentemente usate nella descrizione del moto nella meccanica classica ovvero quella Lagrangiana e quella Euleriana. La prima è prevalentemente usata nella meccanica dei solidi mentre la seconda in quella dei fluidi. Nella descrizione del moto materiale o Lagrangiana la posizione di ciascun punto materiale nella configurazione spaziale o aggiornata xπ al tempo t è funzione della sua posizione nella configurazione di riferimento Xπ e del tempo t xπ = xπ(Xπ,t) = xiπ(X1,X2,X3,t) = ϕt(Xπ) = ϕ (Xπ,t) i=1,3 (II.2.2) dove ϕ(X,t) è una funzione che descrive il movimento del corpo o trasformazione della configurazione iniziale in quella deformata all’istante considerato t. Tale funzione è continua e biettiva se e solo se lo jacobiano Jπ della trasformazione è non nullo. Si ipotizza inoltre che tale funzione sia dotata di derivate parziali continue fino all’ordine di derivazione richiesto e che lo jacobiano Jπ sia strettamente positivo al fine di impedire la compenetrazione di materia di una stessa fase ∂x π J = det π ∂X π (II.2.3) Il gradiente materiale del moto di ciascuna fase è il tensore gradiente di deformazione Fπ o gradiente materiale della posizione ∂x π ∂ϕ( X π ) = F = Grad x = ∂X π ∂X π π π (II.2.4) che descrive il moto nell’intorno del punto Xπ. In forma differenziale si può, infatti, scrivere dxπ = Fπ dXπ oppure 18 dXπ = Fπ-1dxπ (II.2.5) Meccanica dei mezzi porosi da cui si ottiene che il gradiente di deformazione Fπ (o il suo inverso) descrive la deformazione di due punti a distanza infinitesima dX (o dx). Dalla (II.4.4) si ricava che Jπ è anche il determinante del gradiente di deformazione Fπ. La descrizione Euleriana o spaziale del moto segue dalla invertibilità della relazione (II.2.2) Xπ = Xπ( x π,t) (II.2.6) e fornisce la posizione X di una particella che al tempo t occupa la posizione x. E’ definita dal gradiente spaziale della posizione (Fπ)-1; (Fπ)-1= grad Xπ = ∂X π ∂x π (II.2.7) Noto il moto di ciascuna fase π (II.4.1) è possibile definire velocità ed accelerazione nella descrizione materiale ∂x π ( X π , t ) V = = G(Xπ,t) ∂t π Aπ = ∂ 2 x π ( X π , t ) ∂G ( X π , t ) = ∂t 2 ∂t (II.2.8a) (II.2.8b) calcolate tenendo Xπ fissato. Nella descrizione spaziale velocità ed accelerazione sono ottenute introducendo la (II.2.6) nelle due precedenti equazioni ed utilizzando la regola di derivazione di funzioni composte ottenendo vπ(xπ,t) = Vπ(Xπ,t) o ϕ-1(xπ,t) = g(xπ,t) (II.2.9a) 19 Capitolo II ∂g ( x π , t ) a (x ,t) = A (X ,t) o ϕ (x ,t) = ∂t π π π π -1 π (II.2.9b) in cui la lettera o indica la composizione di funzioni. Queste relazioni sono state calcolate con xπ fissato e forniscono anche il legame fra grandezze materiali e le corrispondenti spaziali. Si osservi che la stessa grandezza nelle due descrizioni ha la stessa espressione solo se riferite alla stessa particella Xπ. Nella descrizione meccanica dei mezzi multifase si usano entrambe le descrizioni qui presentate vale a dire quella materiale per lo scheletro solido e quella spaziale per le fasi fluide, con la particolarità che il moto delle fasi fluide è descritto relativamente a quello della solida a sua volta in movimento. E’ quindi necessario introdurre il concetto di derivata materiale di grandezze spaziali e quello di velocità ed accelerazione relativa. L’introduzione della derivata materiale si rende inoltre necessario per poter scrivere le leggi della dinamica, in cui compaiono l’accelerazione delle particelle Aπ = G(Xπ,t). L’operatore derivata materiale permette, infatti, di calcolare la derivata rispetto al tempo di una grandezza conosciuta solo nella sua descrizione spaziale, tenendo fissata la coordinata materiale X. A partire dalla velocità nella sua descrizione spaziale vπ(xπ,t) = g(xπ,t), si vuole allora calcolare l’accelerazione nella descrizione materiale Aπ(Xπ,t). Osservato che vale l’uguaglianza vπ(xπ,t) = g(xπ,t) = g(xπ(Xπ,t),t) ≡ G(Xπ,t) (II.2.10) avendo fissato Xπ ed introdotto la (II.2.2), derivando rispetto al tempo ∂G ∂t = X ∂g ∂g ∂x + ∂t x ∂x ∂t X ed osservando che 20 ∂x = Vπ = G(Xπ,t) ≡ g(xπ(Xπ,t),t) = vπ, si ottiene ∂t X (II.2.11) Meccanica dei mezzi porosi ∂G ∂t = X ∂g + v ⋅ grad g ∂t x (II.2.12) o con altra simbologia Dg ∂g = + v ⋅ grad g Dt ∂t x (II.2.13) A partire dalla velocità vπ(xπ,t) si ottiene l’accelerazione spaziale cercata a= Dv ∂v = + v ⋅ grad v Dt ∂t x (II.2.14) dove il primo termine a destra rappresenta la variazione locale della velocità nell’intorno del punto x ed il secondo il termine convettivo. Il termine a sinistra è l’accelerazione della particella partita da X passante per x al tempo t. Più in generale la derivata temporale materiale di una funzione differenziabile fπ (xπ,t) espressa nella descrizione spaziale e riferita alla fase π in movimento è data dalla π D f π ∂f π = + v ⋅ grad f π Dt ∂t (II.2.15) La derivata materiale rispetto ad una fase α a sua volta in movimento con velocità v α è espressa dalla α D f π ∂f π = + v α ⋅ grad f π Dt ∂t (II.2.16) La differenza fra le due espressioni precedenti fornisce la relazione 21 Capitolo II α π Dfπ Dfπ = + v απ ⋅ grad f π Dt Dt (II.2.17) in cui il termine vαπ = vα - vπ è la velocità di diffusione (Hassanizadeh & Gray [23]). Si introduce ora il concetto di velocità relativa o di diffusione delle fasi fluide (w) e (g) rispetto a quella solida (s) vws = vw - vs vgs = vg - vs (II.2.18) e mediante l’uso del concetto di derivata materiale nel tempo si ricava l’espressione dell’accelerazione relativa a ws = a w − a s − v ws ⋅ grad v w (II.2.19) a gs = a g − a s − v gs ⋅ grad v w (II.2.20) Le equazioni che esprimono l’accelerazione dello scheletro solido (II.2.8b) e delle fasi fluide (II.2.19, II.2.20) saranno utilizzate nel paragrafo (II.2.2) per descrivere i termini di accelerazione che compaiono nelle equazioni di equilibrio alla traslazione per ciascuna fase. Nelle equazioni precedenti velocità ed accelerazione di ciascuna fase π sono da intendersi valori medi come risulta dalla x π (x , t ) = r π (x , t ) = v π = 1 dv ρ ρ(r , t ) r (r , t ) γ π (r , t ) dv m π dv ottenuta applicando i principi di averaging (Lewis & Schrefler [16]). 22 (II.2.21) Meccanica dei mezzi porosi Deformazione del mezzo multifase Si introduce ora un’altra importante osservazione e cioè che il processo di deformazione del mezzo multifase sia associato a quello dello scheletro solido. Considerando la cinematica finita, tre fra i possibili approcci per i mezzi multifase sono: 1. quello seguito da Meroi et al. [41]; 2. quello sviluppato da Simo & Meschke [42]; 3. quello indicato da Molekamp & Choobbasti [43] a partire dalla decomposizione polare di Fs. Nel primo approccio il processo di deformazione è descritto dal tensore gradiente di velocità Ls Ls = grad vs = Ds + Ws (II.2.22) dove la sua parte simmetrica Ds è nota come rateo del tensore euleriano di deformazione e la parte antisimmetrica Ws è il tensore di rotazione; nel secondo tutto il processo di deformazione è legato direttamente al gradiente di deformazione dello scheletro solido Fs. Si osserva che il gradiente di deformazione Fs è la grandezza fondamentale per la descrizione della meccanica del continuo e dalla sua conoscenza si ricavano tutte le misure di deformazione e di tensione collegate ad un punto di materia o ad un suo intorno. Questa osservazione si può giustificare in modo molto semplice calcolando la distanza dx fra due punti P e Q (Fig. II.5). Nella parte rimanente del paragrafo si ometterà l’indicazione dell’apice s. Indicato infatti con dX il vettore posizione di un punto Q0 appartenente all’intorno di P0, il quadrato della distanza dX fra i due punti è dato dalla relazione (dX)2 = dXT dX = dxT (F-T F-1) dx, essendo dX = F-1 dx (II.2.23) in cui è espresso in funzione di F, che definisce il tensore della variazione di posizione di Cauchy o inverso del tensore sinistro di Cauchy-Green F-T F-1 = b-1 (Truesdell & Noll [33]). Analogamente, il quadrato della distanza dx fra i punti P e Q 23 Capitolo II (corrispondenti dei punti P0 e Q0 nella configurazione deformata) è dato dell’espressione (dx)2 = dxT dx = dXT (FT F) dX (II.2.24) e risulta espresso ancora in funzione di F, che definisce il tensore della variazione della posizione di Green o tensore destro di Cauchy-Green FT F = C. Questi tensori sono utilizzati entrambi come misure di deformazione nello studio di corpi in deformazioni elasto-plastiche finite (Simo [44], Miehe & Stein [45]). La differenza (dx)2 - (dX)2 è assunta come misura fondamentale della deformazione che si ha nell’intorno delle due particelle, quando il continuo passa dalla configurazione iniziale a quella deformata, e può essere espressa come (dx)2 - (dX)2 = 2 dXT LT dX = 2 dxT e dx , (II.2.25) dove si è introdotto il tensore Lagrangiano di deformazione finita o di Green L = 1/2 T (F F - I) = 1/2 (C - I) e quello Euleriano di def. finita o di Almansi e = 1/2 (I - F-T F-1) = 1/2 (I - b-1). Introdotti il gradiente materiale e spaziale dello spostamento, è possibile esprimere queste misure di deformazione finita in funzione di tali gradienti, ovvero 1 L= 2 du du + dX dX 1 e= 2 du du + dx dx T T du + dX du − dx T T du dX du dx (II.2.26) (II.2.27) Si osserva che questa è la definizione completa dei tensori di deformazione finita e non la loro approssimazione al secondo ordine (Malvern [58]). 24 Meccanica dei mezzi porosi Nell’ipotesi che sia possibile considerare i gradienti di spostamento piccoli rispetto l’unità, si può trascurare la parte quadratica delle misure di deformazione finita, ottenendo le misure di deformazione associate alle piccole deformazioni 1 L= 2 du du + dX dX 1 e= 2 du du + dx dx T (II.2.28) T (II.2.29) Se anche gli spostamenti sono piccoli (ma si dimostra che, se il gradiente è piccolo, integrando si hanno comunque spostamenti piccoli), è possibile allora trascurare la differenza fra la configurazione deformata e quella iniziale x π → X π e le due misure di deformazione coincidono, dando origine al tensore delle deformazioni infinitesime prevalentemente usato in ingegneria ε= 1 2 du du + dX dX T (II.2.30) 25 Capitolo II II.2.2. Equazioni di conservazione della massa Introdotta la frazione di volume ηπ per ciascuna fase in funzione della porosità n= dv w + dv g dv e del grado di saturazione Sw = dv w dv w + dv g Sg = dv g dv w + dv g dell’acqua o della fase gassosa sono valide le seguenti relazioni ηs = 1 − n ηw = nS w ηg = n S g che soddisfano alla condizione Sw + Sg = 1. Figura II.6. Relazioni tra fasi. Elemento nel suo assetto naturale (a), e sua rappresentazione mediante schema a fasi concentrate (b) Le equazioni di conservazione della massa sono: per la fase solida D[(1 − n )ρs ] + ρs (1 − n ) div v s = 0 Dt s 26 (II.2.31) Meccanica dei mezzi porosi Questa equazione si ricava a partire dalla generale equazione di bilancio macroscopica (II.3.4) introducendovi i valori ψ s = 1, i s = 0, b s = 0, Is = 0, G s = 0 ottenendo ∂ρs + div ( ρs v s ) = ρs es (ρ) , ∂t (II.2.32) in cui le quantità contenute sono valori mediati utilizzando le procedure indicate al paragrafo (II.1.1). In particolare ρs rappresenta la densità mediata della fase solida e v s la velocità della fase solida mediata sulla massa. Esprimendo la derivata materiale della densità ρs s D ρs ∂ρs = + grad ρs ⋅ v s ∂t Dt (II.2.33) e sostituendola nella precedente (II.4.32), si ottiene s D ρs + ρs div v s = 0 Dt (II.2.34) Considerando l’identità div( ρs v s ) = ρs div v s + grad ρs ⋅ v s (II.2.35) e introducendo la densità media intrinseca ρs = ηsρs = (1 - n)ρs si ottiene la (II.2.31). 27 Capitolo II Fase liquida (acqua) w Dρ w + ρ w div v w = ρ w e w (ρ) Dt (II.2.36) dove il termine a destra rappresenta la quantità di acqua evaporata nell’unità di tempo e di volume, definita anche come: ρ w e w (ρ) = − m (II.2.37) Fase gassosa, costituita dal vapore d’acqua (gw) e dall’aria secca (ga) Pur essendo le specie miscibili, si riportano le equazioni separatamente per la fase gassosa e per il vapore d’acqua, che sono rispettivamente: g D( nS gρ g ) Dt + nSg ρg div v g = m (II.2.38) g D( nS g ρ gw ) Dt gw g + divJ gw g + nS g ρ div v = m (II.2.39) gw gw dove il termine J gw è il flusso di massa della componente vapore g = nSg ρ u d’acqua. Queste equazioni si ottengono in modo analogo a quella della fase solida, a partire cioè dalle equazioni macroscopiche per le due componenti distinte (aria secca ga e vapore acqueo gw) ( ∂ nSgρga ( ∂t ) + div ( nS ρ ∂ nSgρgw 28 ∂t ga g ) + div ( nS ρ g ) v ga = 0 (II.2.40) ) (II.2.41) gw v gw = nSgρgw egw (ρ) = m Meccanica dei mezzi porosi ed introducendovi la densità intrinseca e la derivata temporale materiale. L’equazione di tutta la fase gassosa si può ottenere sommando le equazioni di ciascuna componente, tenendo conto che esse hanno la stessa frazione di volume nSg perché miscibili. II.2.3. Equazioni di conservazione della quantità di moto Fase solida div t s + ρs ( g s − a s ) + ρs t s = 0 (II.2.42) Fasi fluide ( ) [ ] div t π + ρ π g π − a π + ρ π e π (ρr ) + t π = 0 (II.2.43) in cui i termini gπ = ∂v π 1 + grad v π ⋅ v π ρgγ π dv m a π = v π = ∂t ρ π dv dv (II.2.44) rappresentano rispettivamente le forze di volume e l’accelerazione della fase π sempre in senso medio L’interazione meccanica della fase π rispetto alle fasi α è rappresentata dal termine Iπ = tπ = πα 1 k t m ⋅ n da m ρπ dv α ≠ π da πα (II.2.45) 29 Capitolo II II.2.4. Equazione di conservazione del momento della quantità di moto Procedendo in modo analogo a quanto fatto per ricavare le altre equazioni di bilancio ed introducendovi l’ipotesi iniziale di mezzo multifase non polare, si ricava la simmetria del tensore di tensione tπ = (tπ)T (II.2.46) II.2.5. Equazione di bilancio dell’energia π D Eπ ρπ = t π : D π + ρ π h π − div ~ q π + ρπ R π Dt (II.2.47) dove [ ( ) ρ π R π = ρπ eπ ρE − e π (ρ) E π + Q π ] (II.2.48) La (2.4.48) è soggetta alla π ( ) ( ) 1 ~ ρπ e π ρE + e π ρ r ⋅ v π + e π (ρ) v π ⋅ v π + t π ⋅ v π + Q π = 0 2 (II.2.49) II.2.6. Disuguaglianza di Clausius-Duhem L’equazione di bilancio dell’entropia fu introdotta da Coleman & Noll [46] per derivare legami costitutivi consistenti con la termodinamica ovvero che non violino la seconda legge della termodinamica. Si ottiene a partire dalla relazione valida a livello microscopico , facendo uso dell’equazione di conservazione della massa di ciascun costituente. Ricavate le variabili generali macroscopiche in senso medio e cioè l’entropia specifica media per ciascun costituente λπ e la densità di entropia fornita da cambi di fase e da interazioni di tipo meccaniche, si ottiene la disuguaglianza relativa alla produzione di entropia per il mezzo multifase 30 Meccanica dei mezzi porosi π π D λπ 1 1 ρπ + ρπ e π (ρ) λπ + div π q π − π ρπ h π ≥ 0 Dt θ θ dove λπ = temperatura e (II.2.50) 1 ρλγ π dv m è l’entropia media, qπ il flusso di entropia per unità di ρπ dv dv hπ rappresenta la sorgente di entropia di ciascuna fase. θπ 31 Capitolo II II.3 Equazioni costitutive Le equazioni costitutive per tutte le fasi presenti sono necessarie per essere introdotte nelle equazioni di bilancio macroscopiche precedentemente elencate, in modo da ottenere quelle equazioni nella forma adatta ad essere risolte per via numerica col metodo degli elementi finiti.Si sviluppano dei modelli costitutivi basati su quantità misurabili in prove di laboratorio o in sito e che sono state convalidate da prove sperimentali. Come indicato da Lewis & Schrefler [16], le equazioni precedentemente presentate permettono l’introduzione di modelli costitutivi ben più elaborati di quelli che vengono utilizzati in questa sede e che sono coerenti con l’approccio termodinamico proposto da Coleman & Noll [46], come quelli sviluppato, ad es., da Gray & Hassanizadeh [21-22] per quanto riguarda il flusso multifase o da Ehlers [47] a riguardo di modelli a gradiente del secondo ordine per la fase solida. II.3.1. Equazioni costitutive delle fasi fluide Tensore delle tensioni nelle fasi fluide Si introduce un tensore delle tensioni idrostatico per le fasi fluide tπ applicando la disuguaglianza dell’entropia (II.2.50) per materiali comprimibili, ottenendo (Hassanizadeh & Gray [22], Gray & Hassanizadeh [48]) t π = −η π p π I (II.3.1) dove I è il tensore identità del secondo ordine e pπ è la pressione della fase π. La presenza della frazione di volume indica che tale tensore di tensione agisce sulla fase fluida π per unità di area di mezzo multifase; peraltro, per una distribuzione isotropa delle fasi, gli operatori di media su area e volume coincidono (si veda la legge di Delesse). Fase gassosa: aria secca (ga) e vapore d’acqua (gw). Equazione di stato dei gas perfetti Si assume che l’aria secca ed il vapore acqueo costituiscano una miscela di gas perfetti. E’ quindi valida l’equazione di stato dei gas perfetti applicata all’aria secca 32 Meccanica dei mezzi porosi (ga), al vapore d’acqua (gw) e alla miscela dei due (g); essa esprime il legame fra la pressione, la densità e la temperatura assoluta di ciascun gas e della miscela p ga = ρga θR / M a p gw = ρgw θR / M w p g = ρgθR / M g (II.3.2) dove Mπ è la massa molare del costituente π ed R è la costante universale dei gas. Nella (II.3.2c) compare il valore della pressione e della densità della miscela dei due gas perfetti, espressa dall’equazione di Dalton p g = p ga + p gw ρg = ρ ga + ρ gw (II.3.3) da cui deriva la massa molare della miscela Mg indicata nella (2.5.2c) ρgw 1 ρga 1 Mg = + ρg M w ρg M a −1 (II.3.4) Equazione di equilibrio delle pressioni fluide in parziale saturazione In condizione di parziale saturazione è noto essere presente nei pori del mezzo poroso acqua in equilibrio con la sua fase di vapore, miscelata o meno con aria secca. Un menisco concavo a causa della tensione superficiale separa la fase liquida da quella aeriforme. La superficie libera dell’acqua si comporta allora come una membrana tesa in grado di resistere ad una tensione superficiale T. Fig. II.7. Angolo di contatto fra la fase solida e quella liquida all’interno dei vuoti di un mezzo poroso parzialmente saturo. 33 Capitolo II Tale tensione, combinata con l’adesione del liquido alle superfici con cui è in contatto, genera il fenomeno di capillarità, ossia la risalita dell’acqua al di sopra della superficie libera, caratterizzato dalla presenza di tensioni di trazione per l’acqua (pressione capillare pc). Questo fenomeno si può studiare in prima approssimazione considerando un tubo capillare (Fig. II.8). Fig. II.8. Menisco all’interno di un tubo capillare. Imponendo l’equilibrio alla traslazione verticale alla base del tubo capillare πR 2ρw g h c = 2π R T cos θ (II.3.5) si ottiene un’altezza di risalita capillare hc pari a (supponendo cosθ = 0.5) hc = T ρ gR w (II.3.6) in cui R è il raggio del tubo capillare. La massima altezza di risalita hc è governata dal diametro del tubo quando questo è decisamente piccolo. In un tubo grosso invece, quando la pressione negativa dell’acqua raggiunge la pressione di vapore, si hanno fenomeni di cavitazione. Nota la pressione di vapore saturo o di cavitazione (2,339 kPa) e la tensione superficiale T (7,427 N/m) a temperatura ambiente (20° C), utilizzando la (II.3.5) si può 34 Meccanica dei mezzi porosi calcolare il diametro 2R del tubo capillare tale per cui si ha cavitazione. Si ottiene un valore pari a 3µm (Lancellotta [49]), confrontabile con quello del diametro medio dei pori di sabbie dense. In tali sabbie è stato osservato questo fenomeno durante prove biassiali di compressione in condizioni non drenate (Mokni [50]). Se il diametro del tubo equivalente è inferiore a tale valore non possono verificarsi fenomeni di cavitazione, in quanto la tensione superficiale risulta troppo elevata e non consente la formazione di bolle. L’equilibrio fra le pressioni fluide nelle zone parzialmente sature definisce la pressione capillare pc come la differenza fra la pressione del gas pg e la pressione dell’acqua pw pc = pg − pw (II.3.7) Si osserva fin d’ora che questa relazione esprime l’equilibrio fra due quantità indipendenti e cioè la pressione capillare e la differenza fra la pressione della fase gassosa e quella liquida. Le pressioni capillari sono importanti e devono essere considerate nella modellazione dei mezzi multifase parzialmente saturi perché inducono in essi una sorta di coesione apparente, fornendo allo scheletro solido una certa resistenza a trazione a causa della presenza del menisco. L’aggettivo apparente usato per definire tale coesione dipende dal fatto che essa non è un contributo stabile alla resistenza, ma scompare non appena il terreno ritorna saturo. Legge di Kelvin-Laplace e di Clausius-Clapeyron Il rapporto fra la pressione del vapore d’acqua ad una certa temperatura e la pressione dello stesso in condizione di saturazione (definito anche umidità relativa R.H.) è definito dalla legge di Kelvin-Laplace p gw pc M w R. H. = gws = exp w p ρ Rθ (II.3.8) 35 Capitolo II dove la pressione del vapore in condizione di totale saturazione pgws è dipendente solo dalla sua temperatura assoluta θ ed è espresso dalla legge di Clausius-Clapeyron p gws = p gws (θ ) = p gwso exp − M w ∆H gw 1 1 − R θ θo (II.3.9) in cui θo è la temperatura di riferimento, pgws la pressione di vapore saturo alla temperatura θ, pgwso è la pressione di vapore saturo alla temperatura di riferimento e ∆Hgw è l’entalpia specifica di evaporazione. Questa equazione è ottenuta direttamente dalla seconda legge della termodinamica ed è valida per valori di temperatura vicini a quella di riferimento θo. In alternativa all’uso di tale equazione si possono utilizzare delle correlazioni empiriche, come indicato ad es. nel manuale ASHRAE [51]. Problema della distribuzione dei pori: relazione fra pressione capillare e grado di saturazione Come emerge chiaramente nella (II.3.5) e nella (II.3.8), il problema è conoscere la distribuzione dei pori all’interno del mezzo multifase, da cui dipende il valore della pressione capillare pc, in funzione del contenuto d’acqua o del grado di saturazione. Tale relazione è di difficile determinazione in quanto i mezzi porosi sono dei corpi tridimensionali contenenti una rete di canali a geometria variabile a causa di complessi fenomeni d’interazione solido-fluido (si veda (Lewis & Schrefler [16]) per una analisi del problema). La distribuzione dei vuoti può essere ricavata sperimentalmente, ottenendo una relazione valida in senso medio del tipo Sπ = Sπ ( p c , T ) (II.3.10) Equazione di stato per l’acqua Sviluppando l’equazione di conservazione della massa d’acqua in forma differenziale D(ρ w V w ) =0 Dt w 36 (II.3.11) Meccanica dei mezzi porosi e, tenendo conto della dipendenza della densità dalla pressione e dalla temperatura ρw = ρw(pw,T), si ottiene w w w 1 D ρw 1 D pw DT = − βw wo ρ Dt K w Dt Dt (II.3.12) in cui βw è il coefficiente di espansione termica e Kw il modulo volumetrico dell’acqua, inverso del coefficiente di compressibilità Cw; per ricavare la precedente sono state utilizzate le relazioni costitutive elastiche 1 ∂ρ w 1 wo w = ρ ∂p Kw 1 ∂ρ w = −β w ρ wo ∂T (II.3.13) Legge di Darcy Tale legge, ottenuta in origine per via sperimentale, definisce la velocità media di un fluido relativamente allo scheletro solido in funzione del gradiente di pressione. Si tratta quindi di una legge che ha il significato di una rappresentazione statistica delle condizioni di flusso nei mezzi multifase. Per gli scopi della presente tesi tale legge verrà ricavata a partire dalla equazione di continuità della generica fase fluida, in modo da tenere conto anche degli effetti dinamici (paragrafo II.4.2). Legge di Fick Permette di definire la diffusione di una fase fluida in un’altra; in particolare la diffusione della fase π nella fase α (w, g) si esprime come J απ = −ρα Dαπ grad ρπ ρα (II.3.14) 37 Capitolo II dove il termine D απ è il tensore di dispersione funzione del fattore di tortuosità e collegato alla velocità di filtrazione. In particolare, se la fase diffondente in quella gassosa è il vapore acqueo gw o l’aria secca ga, introducendo la relazione fra le densità dei fluidi costituenti la fase gassosa ρg = ρga + ρgw e l’equazione di stato dei gas, si ottiene g J ga g = −ρ MaM w p ga D grad = g M 2g pg (II.3.15) p gw g MaM w =ρ D g grad g = − J gw g M 2g p II.3.2. Tensori delle tensioni nello scheletro solido e delle tensioni totali Il tensore delle tensioni nello scheletro solido si può ottenere a partire ancora dalla disuguaglianza dell’entropia, come in (Gray & Hassanizadeh [48]), in funzione del tensore delle tensioni t se e della pressione dei fluidi agenti sulla fase solida ps (Lewis & Schrefler [16]) t s = (1 − n )( tse − Ips ) (II.3.16) dove ps = pw Sw + pg Sg . Ricordando la relazione esistente fra la frazione di volume del solido e la porosità ηs = 1 − n , si ricava che il tensore di tensione agisce sulla fase solida per area unitaria di mezzo multifase. La somma delle tensioni agenti su ciascuna fase presente definisce il tensore delle tensioni totali σ [ ( )] σ = t s + t w + t g = (1 − n ) t se − I Sw p w + Sg p g − I( ηw p w + ηg p g ) (II.3.17) dove il termine σ ′ = (1 − n )t se rappresenta il tensore delle tensioni effettive. 38 (II.3.18) Meccanica dei mezzi porosi Introducendo nella (II.3.17) la relazione fra la frazione di volume e la porosità per le fasi fluide ηw = nS w ηg = n S g , si ottiene la nota equazione della meccanica dei suoli per un mezzo poroso in condizione di parziale saturazione scritta in termini di tensione totale σ ( σ = σ ′ − I S w p w + Sg p g ) (II.3.19) ) (II.3.20) o di tensione efficace σ’ ( σ ′ = σ + I Sw p w + Sg p g . In condizione di totale saturazione solo la fase liquida è presente poiché Sw = 1 e Sg = 0 e si ritrova il principio delle tensioni efficaci di Terzaghi [52], che è di fondamentale importanza nella descrizione della meccanica dei suoli e cioè σ ′ = σ + Ip w . (II.3.21) La più generale equazione (II.3.20) fu ottenuta da Bishop [53] usando un approccio di tipo fenomenologico. La variazione del tensore delle tensioni efficaci σ′ è causa delle deformazioni dello scheletro solido; il legame fra rateo delle tensioni efficaci e rateo delle deformazioni Ds è descritto dal legame costitutivo per lo scheletro solido Dσ' = D T ( Ds − Dso ) Dt [ ] (II.3.22) 39 Capitolo II tramite il tensore del quarto ordine DT; Dso rappresenta il rateo di deformazione non direttamente associato a variazioni di tensione. In tutta generalità il tensore costitutivo DT dipende dalla storia dello stato di tensione e di deformazione, dalla pressione capillare e dalla temperatura D T = D T (D s , σ ' , p c , T) (II.3.23) I modelli costitutivi utilizzati in questa tesi sono descritti nel seguito. Compressibilità del grano solido Quando risulta necessario non trascurare la compressibilità del grano solido si deve introdurre una relazione che consideri la sua variazione di densità, imponendo la conservazione della massa nel tempo tramite la D(ρs V s ) =0 Dt s (II.3.24) Assumendo la densità solida funzione del tensore delle tensioni agenti sul grano solido e cioè dalla pressione ps esercitata dai fluidi, dal primo invariante del tensore delle tensioni effettive tr σ’ e dalla temperatura T ρs = ρs (ps, tr σ‘, T). (II.3.25) Effettuando la derivata materiale e dividendo per la densità solida ρs, si ottiene la relazione s s s 1 D ρs 1 1 D ps DT ( ) = α − n − βs ( α − n ) − (1 − α) div v s s ρ Dt 1− n K s Dt Dt in cui è stata introdotta la costante di Biot α (Biot & Willis [54]) 40 (II.3.26) Meccanica dei mezzi porosi α = 1− KT Ks (II.3.27) KT è il modulo di deformazione volumetrica dello scheletro solido, Ks quello di deformazione volumetrica del grano solido e βs è il coefficiente di dilatazione termica. Per i suoli si usa porre solitamente α = 1 mentre è stato sperimentalmente osservato che l’equazione (II.3.26) è importante per le rocce e i calcestruzzi (Xie [55]). II.3.3. Legge di Fourier Tale legge è necessaria per esprimere il flusso ~ q di calore nel mezzo multifase ~ = −χ q χ eff grad T (II.3.28) dove χeff è il tensore di conduttività termica effettiva, che diventa un termine scalare nel caso di mezzo isotropo. II.3.4. Permeabilità relativa e grado di saturazione A completamento del modello costitutivo è necessario introdurre il legame fra la permeabilità relativa della fase liquida e quella gassosa in funzione del grado di saturazione, krw = krw (Sw) krg = krg (Sg) (II.3.29) al fine di poter considerare la variazione della permeabilità nelle zone parzialmente sature sperimentalmente osservata (Corey [56]). Tali relazioni saranno usate nel paragrafo (II.6.2). 41 Capitolo II II.4 Equazioni generali Per ottenere le equazioni differenziali che descrivono il comportamento termo-idromeccanico del mezzo multifase nella forma utile ad essere risolte numericamente mediante discretizzazione nello spazio e nel tempo (metodo degli elementi finiti), si devono introdurre le relazioni cinematiche e costitutive, ricavate rispettivamente ai paragrafi (II.2.1.) e (II.3.), nelle equazioni macroscopiche presentate nel paragrafo (II.3.). Le equazioni ottenute hanno la seguente forma. II.4.1. Equazione di conservazione della massa solida e di continuità delle fasi fluide Fase solida L’equazione di conservazione della massa solida è ottenuta a partire dall’equazione macroscopica (II.2.31) divisa per la densità intrinseca media della fase solida ρs, ottenendo s s 1 − n D ρs D n − + (1 − n ) div v s = 0 s ρ Dt Dt (II.4.1) Fase liquida (acqua) L’equazione di continuità della fase liquida si ottiene a partire dall’eq. (II.2.36), introducendovi la definizione di velocità relativa (II.2.18), la derivata materiale nel tempo rispetto al solido (II.2.17) e la densità media intrinseca ρw (ρw = nSwρw). Dividendo per il termine Swρw e sommandovi l’equazione di conservazione della massa s Dn solida (II.4.1), per eliminare la derivata materiale temporale della porosità , si Dt ottiene s s s 1 − n D ρs n D ρw n DSw 1 1 s + div v + w + + w div( nSwρ w v ws ) = − w m (II.4.2) s ρ Dt ρ Dt Sw Dt ρ Sw ρ Sw 42 Meccanica dei mezzi porosi Introducendovi l’equazione di conservazione della massa solida (II.3.26) e dell’acqua (II.3.12) e la relazione che esprime la pressione esercitata dai fluidi sulla fase solida (ps = pw Sw + pg Sg), allo scopo di eliminare le derivate materiali temporali della densità solida e liquida, si ottiene l’equazione di continuità della fase liquida s s s α − n 2 nS w D p w α − n D pg DT Sw + + S wSg + αS w div v s − β sw + Ks Kw Dt Ks Dt Dt s (II.4.3) DS w α−n w α−n g 1 1 + p Sw − p Sw + n + w div ( nS w ρ w v ws ) = − w m Ks Ks Dt ρ ρ in cui le variabili indipendenti sono la pressione dell’acqua pw, del gas pg e la temperatura T. Il coefficiente βsw è funzione dei coefficienti di dilatazione termica della fase solida e dell’acqua β sw = Sw [( α − n )βs + nβ w ] (II.4.4) Nel caso particolare di grano solido non comprimibile, la precedente si semplifica ponendo il coefficiente di Biot α = 1 ed il modulo di deformazione volumetrico 1 = 0. Ks Fase gassosa Operando in modo del tutto analogo a quanto fatto per la fase liquida, a partire dall’equazione macroscopica per la fase gassosa (II.2.38), si ottiene la seguente equazione 43 Capitolo II s 1 ga D p M a + p gw M w ) ( nS α−n Dp α − n 2 Dp θR g SwSg + Sg + αS g div v s + g + Ks Dt Kg Dt ρ Dt s s w s g ( s ) DS w 1 α−n c DT 1 − p Sg + n + g div nS g ρ g v gs − β s ( α − n )S g = m Ks Dt ρ Dt ρ g (II.4.5) in cui le variabili indipendenti sono ancora la pressione dell’acqua pw, del gas pg e la temperatura T. Nel caso particolare di grano solido non comprimibile, la precedente si semplifica ponendo il coefficiente di Biot α = 1 ed il modulo di deformazione volumetrico 1 = 0. Ks Talvolta, al fine di sviluppare studi specifici (comportamento di sabbie sature non drenate), può convenire separare dalla fase gassosa il vapore acqueo, ricavando le equazioni di continuità separatamente per l’aria secca e per le specie acquose, costituite dall’acqua e dal suo vapore. Con queste equazioni, Gawin et al. [57] hanno studiato il trasporto di calore in mezzi porosi parzialmente saturi. Fase gassosa: aria secca L’equazione di continuità per l’aria secca si ricava a partire dall’equazione di continuità macroscopica (II.4.40), operando in modo del tutto analogo a quanto fatto per ricavare l’equazione di tutta la fase gassosa (II.6.5) e cioè introducendovi la derivata temporale materiale rispetto lo scheletro solido (II.4.17) e la velocità relativa (II.4.18), ottenendo g D( nS g ρ ga ) Dt ga g + divJ ga g + nS g ρ div v = 0 (II.4.6) Dividendo quanto ottenuto per il termine ρga Sg, sommandovi l’equazione di continuità della fase solida (II.4.1), l’equazione di conservazione della massa solida 44 Meccanica dei mezzi porosi (II.3.26) e la relazione che esprime la pressione esercitata dai fluidi sul solido (ps = pw Sw + pg Sg), si ottiene s s s nS g D ρ ga α−n D p w α − n 2 D p ga 1 s SwS g + Sg + αS g div v + ga + ga div J ga g + Ks Dt K ga Dt ρ Dt ρ s − ( s ) (II.4.7) DS w α−n c 1 DT p Sg + n + ga div nS g ρ ga v gs − β s ( α − n )S g =0 Ks Dt ρ Dt dove il termine diffusivo J ga g è dato dalla legge di Fick (II.3.14). La precedente si può semplificare nel caso si possa considerare il grano solido non comprimibile ponendo i coefficiente di Biot α = 1 ed il modulo di deformazione volumetrico Ks = ∞. Fase acquosa: acqua e vapore acqueo Similmente a quanto fatto per ricavare la precedente equazione di continuità per l’aria secca (II.4.7), si determina l’equazione per la sola fase di vapore s s s nS g D ρ gw α−n D p w α − n 2 D p gw 1 s + + αS g div v + gw + gw div J gw SwS g Sg g + Ks ρ ρ Dt K gw Dt Dt s ( ) s DS w α−n c DT m 1 − + gw div nS g ρ gw v gs − β s ( α − n )S g = p Sg + n ρ Ks Dt Dt ρ gw (II.4.8) L’equazione di continuità delle specie acquose si ottiene moltiplicando la (II.4.8) per la densità del vapore ρgw, sommandovi l’equazione di continuità dell’acqua (II.4.3) e moltiplicando quanto ottenuto per la densità dell’acqua ρw, in modo da eliminare il termine m che esprime la quantità di acqua o di vapore che cambia di fase per unità di volume e nell’unità di tempo. Si ottiene 45 Capitolo II s ρw s + ρ gw + ρ s α − n 2 nS w α−n D pw α−n D p gw Sw + + ρ gw SwS g + ρw SwSg + Ks Kw Ks Dt Ks Dt w [ ] [ ] s α − n 2 D p gw DT + ρ w S w + ρ gw S g α div v s − ρ w β sw + ρ gw β s (α − n )S g + Sg K gw Dt Dt α−n w α−n g α−n c p Sw − p S w + n − ρ gw p Sg + n Ks Ks Ks s s DS w + Dt D ρ gw w ws + nS g + div J gw + div nS g ρ gw v gws = 0 ) g + div ( nS w ρ v Dt ( ) (II.4.9) Questa equazione di continuità può essere ulteriormente trasformata introducendovi l’equazione di Darcy generalizzata, qualora si voglia tenere in considerazione i fenomeni dinamici (II.4.11). II.4.2. Equazioni di conservazione della quantità di moto Fasi fluide L’equazione di conservazione della quantità di moto delle fasi fluide (II.3.43), ricavata al paragrafo (II.2.3), viene ora modificata introducendovi delle relazioni cinematiche e costitutive. In particolare si introducono la relazione fra la velocità relativa di ciascuna fase rispetto allo scheletro solido (II.2.18), la definizione di accelerazione di ciascuna fase π (II.2.19-20), quella di tensore delle tensioni di ciascuna fase fluida (II.3.1) e la definizione di densità di fase media intrinseca, ottenendo l’equazione di equilibrio della generica fase π: − η π ρ π ( a s + a πs + v πs ⋅ grad v π ) − div ( η π p π I) + η π p π e π (ρr ) + η π p π g − R π η π v πs = 0 (II.4.10) e, trascurando il termine dipendente dal gradiente della velocità della fase π e dal cambiamento di fase, si ottiene 46 Meccanica dei mezzi porosi [ ] ηπ v πs = ( R π ) ηπ − grad p π + ρ π (g − a s − a πs ) . −1 (II.4.11) Introducendo ora l’espressione data dal rapporto fra la permeabilità intrinseca o conducibilità idraulica k e la viscosità cinematica µ (Lewis & Schrefler [16]) (R ) π −1 ηπ = k π π (ρ , η ,T) µ (II.4.12) e la relazione che esprime il tensore di permeabilità come prodotto della permeabilità relativa krπ e di quella intrinseca k, necessaria per tenere conto della sua variazione in presenza di altri fluidi e della eventuale condizione di parziale saturazione k π = k rπ k , (II.4.13) si ottiene la legge di Darcy generalizzata valida in campo dinamico kk r π η v = − grad p π + ρπ (g − a s − a πs ) . (II.4.14) µ π πs [ ] Si sottolinea che il tensore di permeabilità intrinseca kπ dipende in generale dalla variazione della deformazione volumetrica dello scheletro solido o dalla variazione dell’indice dei vuoti, da effetti capillari e dall’interazione fra le fasi fluide presenti. In molte situazioni può essere sufficientemente approssimato dalla sola dipendenza dal grado di saturazione come indicato nella (II.3.29). Si può ancora osservare che l’equazione (II.4.14) ingloba effetti di viscosità ed attrito interno, permettendo di trattare il moto di filtrazione senza dover tenere conto in modo esplicito di tali effetti. In questo senso si può considerare la legge di Darcy come una rappresentazione statisticamente equivalente della legge di Navier-Stokes (Lancellotta [49]). 47 Capitolo II Fase solida L’equazione di conservazione della quantità di moto della fase solida è necessaria per ricavare quella valida per tutto il mezzo multifase. Si determina a partire dall’equazione di conservazione (II.2.42), introducendovi le relazioni costitutive che definiscono il tensore delle tensioni ts (II.2.16), la pressione esercitata dai fluidi sul solido ps (ps = pw Sw + pg Sg) e la definizione di tensione efficace σ’ (II.3.18) [ ( div σ ′ − I(1 − n ) Sw p w + Sg p g )] + (1 − n )ρ (g − a ) − R s s w ηw v ws − R g ηg v gs = 0 (II.4.15) Mezzo multifase L’equazione che descrive la conservazione della quantità di moto dell’intera miscela costituita dallo scheletro solido (s), dalla fase liquida (w) e da quella gassosa (g), si ottiene sommando le rispettive equazioni valide per ciascuna fase fluida (II.4.10) e quella solida (II.4.15) ed introducendovi la densità media ρ, ottenendo: div σ + ρ(g − a s ) − nS w ρ w (a ws + v ws ⋅ grad v w ) − nS g ρ g (a gs + v gs ⋅ grad v g ) = 0 (II.4.16) in cui ρ è la densità media di tutto il continuo multifase, data dall’espressione ρ = (1 − n )ρs + nSw ρ w + nSgρg . L’utilizzo di questa equazione, invece di quelle relative a ciascuna fase nello sviluppo della formulazione debole, permetterà di non separare le forze esterne applicate in quote applicate su ciascuna fase. 48 Meccanica dei mezzi porosi II.4.3. Equazione del bilancio di energia (o di entalpia) Come sviluppato da Lewis & Schrefler [16] a partire dall’equazione di bilancio (II.2.47) ed operando in modo analogo a quanto fatto per ricavare le altre equazioni di questo paragrafo, si ottiene l’equazione che esprime il bilancio di energia per la singola fase π π D θπ ρπ C = ρπ h π − div ~ q π + ρπ R π − ρπ eπ (ρ) H π Dt π p (II.4.17) in cui i termini Hπ e C pπ rappresentano rispettivamente l’entalpia specifica e la capacità specifica di ciascuna fase π. L’equazione che esprime il bilancio di energia per il continuo multifase, ottenuto imponendo l’equilibrio termodinamico locale per tutte le fasi, è data dalla seguente espressione (ρC ) p eff ( ) ∂T + ρ w C wp v w + ρg C gp vg ⋅ grad T − div( χ eff grad T) = − m∆H vap ∂t (II.4.18) in cui si esplicitano i termini (ρC ) p eff = ρs Csp + ρ w C wp + ρg C gp χ eff = χ s + χ w + χ g ∆H vap = H gw − H w 49 Capitolo II II.4.4. Chiusura del modello: condizioni iniziali e al contorno Le equazioni differenziali finora presentate necessitano di condizioni iniziali e al contorno sulle variabili di stato del sistema multifase per essere risolte. Condizioni iniziali Le condizioni iniziali si impongono sulla pressione della fase gassosa, sulla pressione capillare (o sul valore della pressione dell’acqua, grazie all’equilibrio (II.3.7) fra le pressioni fluide e la pressione capillare), sugli spostamenti e sulla velocità dello scheletro solido e sulla temperatura p g = p go , p c = p co , T = To , u = uo , u = uo a t = t0 (II.4.19) Condizioni al contorno Le condizioni al contorno sono rappresentate da valori che le variabili di stato o i loro flussi devono assumere sul contorno del dominio multifase. Definito con Γπ il contorno relativo alla fase π su cui è possibile definire il valore delle variabili del sistema, le condizioni da imporre sono del tipo pg = pg su Γg , pc = pc su Γc , T=T su ΓT , u=u su Γu (II.4.20) In modo analogo si possono imporre valori ai flussi delle fasi fluide sul contorno Γπq (ρ (ρ ga v g − ρg v gw ) ⋅ n = q ga gw ( su Γgq , gw v g + ρ w v w + ρ g v gw ) ⋅ n = β c ( ρgw − ρgw + q w su Γcq , ∞ ) +q ) (II.4.21) − ρ w v w ∆h vap − λ eff ∇T ⋅ n = α c ( T − T∞ ) + q T su ΓTq ed alle forze agenti sullo scheletro solido σ⋅n = t 50 su Γuq (II.4.22) Meccanica dei mezzi porosi in cui n è un versore normale ortogonale alla superficie del mezzo poroso, ρgw ∞ e T∞ sono rispettivamente la densità e la temperatura del vapore in condizioni indisturbate lontane dal contorno, αc e βc sono rispettivamente il flusso di calore per convenzione e il flusso dovuto alla variazione unitaria di densità del vapore d’acqua, qga, qgw, qw e qT sono i flussi imposti sul contorno per l’aria secca, il vapore acqueo, l’acqua ed il calore. Si osserva che il contorno su cui si possono imporre condizioni al contorno e quello su cui si possono imporre flussi sono soggetti alla condizione di unione Γ = Γπ ∪ Γπq . 51 Capitolo II II.5 Cenni al comportamento dei terreni Se si osserva a occhio nudo una manciata di sabbia si nota che essa è formata da particelle distinte o grani (come accade per tutti terreni), sebbene molte particelle costituenti terreni siano tanto piccole che possono essere individuate soltanto con tecniche microscopiche molto sofisticate. Le differenti particelle che formano il terreno non sono fortemente legate tra loro come cristalli di un metallo. Le particelle in terreno sono perciò relativamente libere di muoversi l’una rispetto all'altra. In un terreno, tuttavia, i grani solidi non possono muoversi l’uno rispetto all'altro così facilmente come accade nei fluidi. Ne segue che terreni sono fondamentalmente sistemi particellari; questo è l'aspetto principale della differenza fra la Meccanica dei Terreni, la Meccanica dei Solidi e la Meccanica dei Fluidi. Se si considera un elemento di terreno si può notare come sorgano delle forze di contatto tra i grani. Le singole particelle, naturalmente, si deformano per effetto di queste forze di contatto. Nell'immediato intorno dei punti di contatto si verificano in genere deformazioni elastiche o plastiche. Si può inoltre verificare lo schiacciamento delle particelle che può essere rilevante in alcune situazioni. Le deformazioni provocano l'ampliamento dell'area di contatto delle particelle che consentono quindi l'avvicinamento dei centri delle particelle. Le particelle lamellari presenti nel terreno si inflettono, consentendo in tal modo spostamenti relativi delle particelle adiacenti. Inoltre, quando la sollecitazione tangenziale in corrispondenza del contatto diventa più grande della resistenza taglio disponibile nel contatto medesimo, avrà luogo lo scorrimento relativo delle particelle. La deformazione totale di una massa di terreno risulterà in parte dalla deformazione delle singole particelle, in parte degli spostamenti relativi delle particelle stesse. I dati sperimentali indicano, in ogni caso, che la componente più importante delle deformazione totale di un terreno deriva dallo scorrimento relativo delle particelle e dalle modifiche dell'assetto di queste ultime che ne deriva. Anche se i singoli grani sono rigidi, lo scheletro solido il terreno è in genere piuttosto deformabile, a causa dello scorrimento e delle modifiche dell'assetto delle particelle. Risulta quindi evidente la prima applicazione della natura particellare dei 52 Meccanica dei mezzi porosi terreni: le deformazioni di una massa di terreno derivano essenzialmente dalle interazioni tra le particelle, in particolar modo da loro mutui scorrimenti. Gli interstizi tra le particelle si denominano pori. I pori sono frequentemente riempiti di aria e/o di acqua (con o senza sostanze soluzione). Ne segue il terreno è intrinsecamente un sistema multifase formato da una fase solida, denominata scheletro solido, e dalla fase fluida denominata fluido interstiziale. La natura del fluido interstiziale influisce sulle intensità della resistenza a taglio tra le due particelle, poiché veicola su superfici di contatto sostanze chimiche. Nel caso di particelle molto minuscole, il fluido interstiziale può separare in modo completo le particelle. Malgrado le particelle non siano più in contatto, nel senso consueto del termine, esse rimangono ancora molto vicine possono trasmettere forze normali anche forze tangenziali. La distanza tra le particelle diminuirà o aumenterà all'aumentare o a diminuire, rispettivamente, degli sforzi di compressione applicati. Si introduce, in tale modo, una nuova fonte di deformazione del terreno. E così sia la seconda conseguenza della natura particellare dei terreni: i terreni sono intrinsecamente multifase; i componenti della fase fluida che occupa i pori influiscono sulle caratteristiche delle superfici delle particelle solide e influiscono di conseguenza sul processo di trasmissione degli sforzi attraverso i punti di contatto. Questa interazione tra le fasi viene definita interazione chimica. Si consideri un provino di terreno nel quale i pori siano completamente riempiti d'acqua ovvero in altri termini il terreno sia saturo d'acqua. Si ipotizzi, dapprima che nell'acqua interstiziale esista un regime di pressione idrostatica: la pressione agente sull'acqua nel generico punto è, perciò, pari al prodotto del peso specifico dell'acqua per la profondità del punto misurata a partire dalla superficie libera dell'acqua. In tale situazione non si ha moto dell'acqua nel terreno. Si supponga che la pressione nell'acqua alla base del contenitore venga incrementata successivamente mantenendo invariato il livello del pelo libero dell'acqua mediante uno sfioratore. In questa situazione, si determina un'infiltrazione dell'acqua verso l'alto. La portata filtrante attraverso il terreno dipende dall'entità dell'incremento di pressione nell'acqua alla base, e da una proprietà del terreno definita permeabilità. Più il terreno è permeabile più alta è la portata filtrante a parità di incremento di pressione. L'intensità delle forze integranulari deve dipendere dalla differenza tra la pressione totale verticale diretto versi il basso e la pressione interstiziale. Si tratta quindi del fondamentale concetto di pressione efficace. Si ha così 53 Capitolo II la terza implicazione della natura particellare dei terreni: l'acqua può filtrare nei terreni interagendo con lo scheletro solido e modificando l'intensità delle forze che le particelle mutuamente si trasmettono in corrispondenza dei punti di contatto, determinando variazioni di volume del terreno. Fig. II.9. Modello analogico idromeccanico per l’analisi della ripartizione degli sforzi tra le fasi solida e liquida, e del processo di consolidazione del terreno. (a) Schema fisico. (b) Modello analogico idromeccanico: stato iniziale. (c) Carico applicato a valvola chiusa. (d) Lo stantuffo si abbassa quando l’acqua fuoriesce. (e) Situazione finale di equilibrio; la fuoriuscita di acqua cessa. (f) Graduale trasferimento del carico dall’acqua alla molla. Essendo i terreni mezzi multifase, è da attendersi che i carichi applicati ad una massa di terreno siano sopportati in parte dallo scheletro solido e in parte dalla fase fluida. Il concetto di ripartizione del carico è analogo a quello riguardante le pressioni parziali dei gas. Gli schemi di Fig. II.9. possono aiutare a comprendere la ripartizione degli sforzi tra scheletro solido e fase fluida. In figura è rappresentato un elemento di terreno racchiuso in un cilindro. Lo stantuffo di materiale poroso consente di applicare il carico 54 Meccanica dei mezzi porosi al terreno consentendo, allo stesso tempo, la fuoriuscita di fluido dai pori del terreno. In figura è rappresentato un modello analogico idromeccanico, nel quale le proprietà del terreno sono concentrate: la resistenza a compressione dello scheletro solido è presentata per mezzo di una molla della resistenza ha moto dell'acqua nel terreno mediante un foro, munito di valvola, praticato nel nostro tuffo del resto supposto impermeabile. Si applichi un carico sullo stantuffo del modello analogico mantenendo chiusa la valvola. Il carico trasmesso dallo stantuffo si ripartisce tra l'acqua e la molla in proporzione alle residenze della molla e dell'acqua. Nell'analogia idromeccanica, lo stantuffo si sposterà poco all'atto dell'applicazione del carico perché l'acqua è relativamente poco compressibile. Di conseguenza, la molla si accorcerà in modo insignificante, su di essa si trasmetterà soltanto una piccolissima parte del carico esterno. Quest'ultimo sarà equilibrato pressoché interamente da un incremento di pressione del fluido nel cilindro. Aprendo, quindi, la valvola si avrà la fuoriuscita d’acqua dal cilindro a causa della pressione agente nel fluido. A seguito dell'espulsione dell'acqua, la molla si accorcia e comincia a sopportare una frazione significativa del carico applicato; contemporaneamente si verifica una riduzione della pressione nell'acqua. Alla fine si raggiunge uno stato nel quale il carico applicato è trasmesso interamente alla molla e la pressione nell'acqua ritorna ai valori idrostatici iniziali. Appena il processo ha raggiunto questo stadio cessa il modo d’infiltrazione dell'acqua. Attraverso la valvola può essere espulso, nell'unità di tempo, soltanto un volume d'acqua limitato, e perciò il processo di trasferimento del carico dall'acqua la molla si sviluppa gradualmente nel tempo. La variazione, nel tempo, del rapporto fra la parte di carico trasmesso all'acqua e quella trasmessa allo scheletro solido è mostrata in figura. Questo processo graduale d’espulsione d’acqua dal terreno è definito consolidazione, mentre la sua durata è il ritardo idrodinamico. Dalle osservazioni innanzi esposte si trae dunque la quarta implicazione della natura particellare dei terreni: se il carico applicato ad un terreno subisce un brusco incremento, tale incremento si ripartisce tra la fase solida e la fase fluida. Le variazioni di pressione interstiziale inducono morti di filtrazione nel terreno, con conseguenti modifiche nel tempo delle proprietà di quest'ultimo. 55
© Copyright 2026 Paperzz