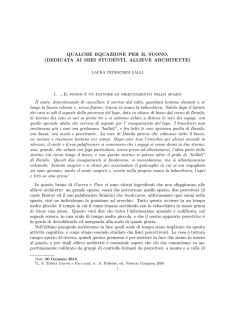
OscArmon-Risonanza - 1 PROCESSI OSCILLATORI 1) OSCILLAZIONI LIBERE (OSCILLATORE ARMONICO) Siamo in presenza di un sistema la cui equazione che & & esprime il 2° principio della dinamica F = ma è del tipo ( ) & N & & & − kxi + mg + N = ma − kxi & mg (1) x Proiettando sull'asse x si ottiene: − kx = mx (2) che è un'equazione che ammette soluzioni del tipo x( t ) = A cos(ω 0 t + ϕ ) (3) Derivando la (3) si ottiene: x ( t ) = − Aω 0 sin(ω 0 t + ϕ ) (4) x( t ) = − Aω 20 cos(ω 0 t + ϕ ) (5) Imponiamo le condizioni iniziali: per t = 0 sia x(0) = x 0 e x (0) = 0 . Dalla (4) segue: x (0) = − Aω 0 sin(ϕ ) = 0 ⇔ ϕ = 0 (6) mentre dalla (3), con la (6) si ha x(0) = A cos(0) = x 0 ⇔ A = x 0 La soluzione è quindi: (7) OscArmon-Risonanza - 2 x( t ) = x 0 cos(ω 0 t ) (8) ( t ) = − ω 02 x 0 cos(ω 0 t ) x (9) Sostituendo la (8) e la (9) nella (2) si ottiene: − k + ω 20m = 0 (10) Dalla (10) si vede che il sistema ha una pulsazione propria, k . A questa pulsazione corrispondono la m ω 0 , data da ω 0 = frequenza ν 0 = ω0 1 k 1 m e il periodo T = = = 2π ν0 2 π 2π m k L'energia potenziale del sistema è data da U= 1 2 1 kx = k x 0 cos(ωt ) 2 2 [ ] 2 ≡ 1 2 kx 0 cos2 (ωt ) 2 (11) mentre l'energia cinetica, utilizzando le (4), (6) e (7) è data da T= 1 1 mx 2 = m − x 0ω 0 sin(ω 0 t ) 2 2 [ ] 2 = 1 mω 20 x 20 sin2 (ω 0 t ) 2 (12) Dalla (10) ricaviamo k = mω 20 , col che la (12) si può riscrivere: T= 1 2 kx 0 sin2 (ω 0 t ) 2 (13) Utilizzando la (11) e la (13) si vede che la somma delle energie cinetica e potenziale è E = T+U = 1 2 1 1 kx 0 sin2 (ωt ) + kx 20 cos2 (ωt ) = kx 20 2 2 2 ∀ t (14) OscArmon-Risonanza - 3 1 0 x A & v & v x & v 6 0 -A x A & v 0 4 0 x A x A & v 3 0 x A 0 -A 2 A 0 5 7 & v 0 x A 8 x A x xo t 1 2 3 4 5 6 7 8 E=T+U U= T = t 1 2 1 2 2 kx cos ωt = U 0 2 2 1 + cos 2ωt max 2 1 − cos 2ωt 2 kx sin ωt = T max 2 0 OscArmon-Risonanza - 4 2) OSCILLAZIONI SMORZATE Se sul sistema agisce anche una forza resistente che dipende & & dalla velocità (resistenza di tipo viscoso) f = −bv , si ha & N − kxi & f & & & & − kxi − bv + mg + R = ma & mg x la cui proiezione sull'asse x fornisce = −kx − bx mx che è un'equazione ⇒ x + bx + kx = 0 m differenziale lineare (16) a coefficienti costanti. Cerchiamo soluzioni del tipo x = e γt ⇒ x = γe γt ⇒ x = γ 2 e γt Sostituendo nella (16) si ha: ( ) e γt mγ 2 + bγ + k = 0 (17) Essendo e γt > 0 ∀ t , deve quindi essere mγ 2 + bγ + k = 0 (18) ovvero γ deve essere soluzione della (18), e sarà quindi dato da γ 1,2 b b2 k ± =− − 2m 4m 2 m (19) Si hanno tre diversi casi a seconda che sia il discriminante (15) OscArmon-Risonanza - 5 2 k > b ∆= 0 − 2m m < 1. Se ∆ > 0 (grandi smorzamenti), γ 1 e γ 2 sono reali e distinte, e negative. La soluzione dell'equazione del moto è x(t) = A 1e γ 1t + A2e γ 2t =e − b t 2m (A e 1 ∆t + A2e ∆t ) (20) 2. Se ∆ = 0 (smorzamento critico), γ 1 e γ 2 sono reali e coincidenti, e si ha γ 1 = γ 2 = − b . La soluzione 2m dell'equazione del moto è x( t) = e − b t 2m (A 1 + A 2 t) (21) 3. Se ∆ < 0 (piccoli smorzamenti), γ 1 e γ 2 sono immaginarie; si ha γ 1,2 b ± iω ' , con i = =− 2m − 1 e ω' = k b − m 2m 2 (22) La soluzione dell'equazione del moto è: x( t) = e − b t 2m (A e 1 iω ' t + A 2 e − iω 't ) (23) Sfruttando le formule di Eulero eiθθ = cos θ + i sin θ ; e − iθ = cos θ − i sin θ si ottiene x( t ) = e − b t 2m [A 1(cos ω ' t + i sin ω ' t) + A 2 (cos ω ' t + i sin ω ' t)] = OscArmon-Risonanza - 6 =e − b t 2m [(A 1 + A 2 )cos ω 't + i(A 1 − A 2 )sin ω' t] (24) Poniamo ora A1 + A 2 = A cos ϕ e i(A1 − A 2 ) = A sin ϕ ; si ha x(t) = Ae − b t 2m [cos ω ' t cos ϕ + sin ω ' t sin ϕ ] (25) da cui x(t) = Ae − b t 2m cos (ω ' t + ϕ) (26) Queste sono oscillazioni smorzate con pulsazione 2 ω' = k b k − = ω0 < m 2m m (27) OscArmon-Risonanza - 7 3) OSCILLAZIONI FORZATE Se oltre alla forza elastica di richiamo ed alla resistenza di tipo viscoso c'è anche un'altra forza di tipo alternativo & espressa da F = F cos(ωt )i , il 2° principio della dinamica si scrive come & F & N & mg − kxi & & & & − kxi − bv + mg + R + F cos(ωt )i = ma & f x che proiettata sull'asse x da + bx + kx = F cos(ωt ) mx (29) Questa è una equazione differenziale lineare del II ordine, completa, a coefficienti costanti. L'integrale generale della (29) è dato dall'integrale generale della equazione differenziale omogenea associata alla (29), ovvero + bx + kx = 0 mx (30) più un integrale particolare della equazione completa (29). L'integrale generale della (30) si risolve come descritto al punto 2), e rappresenta il comportamento transitorio (o transiente) del sistema dopo che viene perturbato. A tempi lunghi questa comportamento smorzato scompare, e la soluzione della (29) la cerchiamo nella forma x( t ) = X m cos(ωt − ϕ ) (31) x ( t ) = − ωX m sin(ωt − ϕ ) (32) che ha derivate (28) OscArmon-Risonanza - 8 x( t ) = − ω 2 X m cos(ωt − ϕ ) (33) Sostituendo le (31), (32) e (33) nella (29) si ottiene la seguente equazione: − mω 2 X m cos(ωt − ϕ ) − bωX m sin(ωt − ϕ ) + k = F cos(ωt) Usando le formule trigonometriche di sottrazione, raccogliendo e quindi separando i termini in cos(ωt) e sin(ωt) , dividendo tutti i termini per m e ricordando che k m = ω 20 si ottiene il seguente sistema di equazioni bω F 2 2 − + ω ϕ cos X X m sinϕ = ω m 0 m m bω ω 20 − ω 2 X m sinϕ − X m cos ϕ = 0 m ( ( ) ) e le costanti X m e ϕ soddisfano quindi le relazioni ( Fm ω 20 − ω 2 X m cos(− ϕ ) = m X m sin(− ϕ ) = 2 ( m ω 20 2 −ω ) 2 2 ) 2 +b ω (34) 2 Fbω ( ω 20 −ω ) 2 2 2 +b ω 2 (35) dalle quali si ottiene F Xm = m tgϕ = ( ω 20 2 ( bω ω 20 ) −ω − ω2 m ) 2 2 (36) 2 +b ω 2 (37) OscArmon-Risonanza - 9 Dalle (36) e (37) si ha che: 1. lo spostamento della massa m è sfasato di un angolo ϕ rispetto alla forza (); l'angolo di sfasamento è sempre positivo, e varia tra 0 e π ; 2. l'ampiezza di oscillazione X m dipende da ω ; 3. il massimo valore di X m si ha per ω = ω 0 1 − (b 2mω ) ≅ ω 0 2 (frequenza di risonanza); in corrispondenza a tale valore di frequenza lo sfasamento vale ϕ = π 2 .
© Copyright 2026 Paperzz