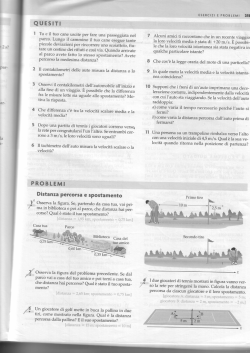
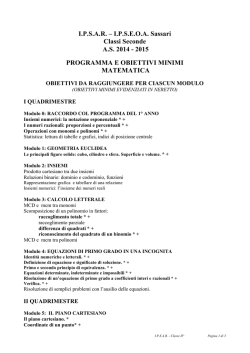
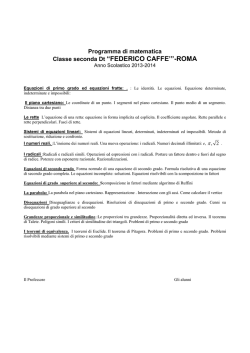
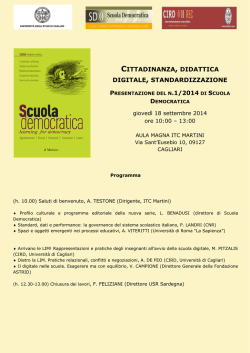
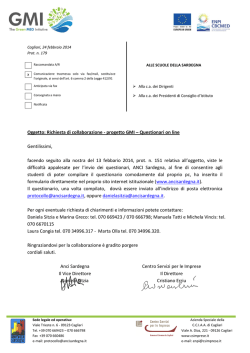
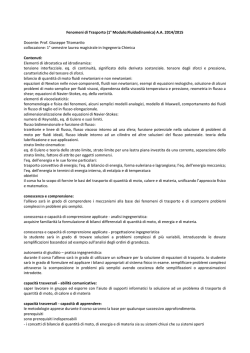
Università degli Studi di Cagliari - Facoltà di Ingegneria e Architettura Metodi agli Elementi Finiti - (AA 2013/’14) CAP. 3 – ENERGIA POTENZIALE E METODO DI RAYLEIGH-RITZ Nel secondo capitolo per generare le equazioni di equilibrio nella forma ∙ = , abbiamo fatto ricorso a degli argomenti di tipo fisico. In questo capitolo introdurremo la funzione “POTENZIALE TOTALE”: si tratta di una funzione degli spostamenti che quando è minimizzata rispetto agli spostamenti, dà luogo ad un insieme di equazioni di equilibrio. Così, in alternativa al metodo diretto presentato nel secondo capitolo, per definire uno stato di equilibrio statico è possibile ricorrere al metodo del “minimo potenziale”. Nel caso della struttura reticolare usata come esempio nel capitolo precedente, i due metodi conducono allo stesso sistema di equazioni ∙ = . Allora perché è necessario un altro metodo ? Il motivo è che con il metodo diretto è difficile, se non impossibile, formulare adeguatamente elementi più complicati della semplice asta tirante/puntone. Un metodo che si basa sulla minimizzazione del potenziale è più generale ed affidabile. In questo capitolo spiegheremo il metodo della minimizzazione del potenziale e nei capitoli successivi lo utilizzeremo per formulare gli elementi finiti. 3.1 Introduzione Il metodo degli elementi finiti può essere visto come una forma del metodo di Rayleigh-Ritz, che a sua volta è una tecnica che cerca la configurazione di equilibrio approssimata della struttura in esame. Usualmente, ma non necessariamente, per descrivere il campo di spostamento approssimato si utilizza una funzione polinomiale. Per un dato problema sono possibili numerosi polinomi, ma il metodo di soluzione ne sceglie uno in particolare. In parole povere, tra tutti i polinomi possibili, il metodo di soluzione seleziona quello che contemporaneamente minimizza l’energia potenziale e soddisfa, in modo approssimato, le condizioni di equilibrio. Il tipo di approssimazione deve essere studiato con attenzione. Una spiegazione matematica del metodo degli elementi finiti non deve basarsi necessariamente sul concetto di minimo del potenziale; per esempio il metodo degli elementi finiti può essere visto come una forma del metodo di Galerkin. Ma fino ad oggi il concetto di minimo del potenziale è stato il più utile per i problemi che hanno a che fare con l’analisi degli sforzi ed è per questo che ci limiteremo a discutere questo metodo. Quando si utilizza il metodo degli elementi finiti è molto utile avere una buona conoscenza della fisica dei problemi in esame. Sono anche importanti buone competenze di carattere teorico che possano portare a tecniche di soluzione efficaci, non dettate direttamente da ragionamenti di carattere fisico. Ciò suggerisce che il metodo può essere applicato a problemi diversi dall’analisi degli sforzi e che, oltre all’energia potenziale, come base possono essere usate altre funzioni. 3.2 Energia Potenziale Totale Definiamo SISTEMA l’insieme costituito da una struttura elastica e dai carichi che su di essa agiscono. Il sistema è conservativo se è nullo il lavoro complessivo necessario per deformarlo a partire da una configurazione qualsiasi per poi riportarlo nella configurazione iniziale, indipendentemente dalla storia di carico. L’ENERGIA POTENZIALE di un sistema è la somma dell’energia elastica in esso contenuta più la capacità che hanno i carichi (che su di essa agiscono) di fornire lavoro quando il punto su cui sono applicati subiscono uno spostamento. Se prendiamo il sistema e lo muoviamo, il lavoro che facciamo, positivo o negativo che sia, si somma algebricamente all’energia potenziale già presente nel sistema conservativo. Il PRINCIPIO DELLA MINIMA ENERGIA POTENZIALE afferma che: fra tutte le configurazioni deformate compatibili con la continuità interna del solido e con le condizioni al contorno, quelle che soddisfano anche le equazioni di equilibrio rendono l’energia potenziale stazionaria. Se il valore stazionario è minimo, l’equilibrio è stabile. I sistemi elastici che più facilmente ci vengono in mente hanno una sola posizione di equilibrio stabile. Ma il principio così come enunciato è valido anche per sistemi non lineari, ma conservativi, con uno o più configurazioni di equilibrio. E’ importante notare che non possiamo considerare tutte le configurazioni A cura di Filippo Bertolino: marzo 2014 Pag 1 Università degli Studi di Cagliari - Facoltà di Ingegneria e Architettura Metodi agli Elementi Finiti - (AA 2013/’14) deformate, ma solo quelle che soddisfano le condizioni di congruenza. Queste prendono il nome di CONFIGURAZIONI AMMISSIBILI. Per esempio un solido continuo non può dividersi internamente ed una mensola non può spostarsi ne ruotare intorno all’incastro. Consideriamo per esempio il sistema molla-forza della Fig.3.2.1. Le configurazioni ammissibili sono indicate dallo spostamento d. Quando d è nullo, la molla è a riposo. L’energia potenziale vale: = ∙ ∙ − ∙ [3.2.1] Il segno negativo che compare nell’eq. (3.2.1) è dovuto al fatto che P perde una parte della sua capacità di produrre lavoro quando il suo punto di applicazione si sposta nello stesso verso del suo segno positivo. Si può anche notare che se definiamo nullo lo “STATO ENERGETICO” che corrisponde a d = 0, il lavoro esterno per deformare la molla e − ∙ per che dobbiamo fornire per produrre lo spostamento d è pari a ∙ ∙ spostare il punto di applicazione della forza. Questo lavoro è immagazzinato come ENERGIA POTENZIALE. Lo spostamento a cui corrisponde lo stato di equilibrio, rende stazionaria rispetto allo spostamento virtuale . Quindi: = ∙ − ∙ =0 L0 k [3.2.2] d e la posizione di equilibrio (la configurazione deformata) è: = P [3.2.3] Fig.3.2.1 – Sistema molla - forza il lavoro fatto dalle forze interne ∙ più il lavoro fatto dalle forze esterne P è nullo quando al sistema si impone uno spostamento infinitesimo a partire dalla sua posizione di equilibrio. L’equazione (3.2.3) è una forma del PRINCIPIO DEI LAVORI VIRTUALI: esso afferma che Si può anche dire che un osservatore deve fare un lavoro totale nullo per cambiare la configurazione da a + . Energia nulla per d = 0 mm 6000 Energia Elastica 2000 Potenziale del carico 0 -4000 0 20 Spostamento 40 Potenziale Totale Energia nulla per d = 20 mm Energia Elastica 6000 Potenziale Potenziale 4000 -2000 8000 4000 Potenziale del carico 2000 0 -2000 0 -4000 -6000 20 40 60 Potenziale Totale Spostamento Dal grafico vediamo che il punto stazionario è un minimo, quindi l’equilibrio è stabile. Si può anche notare che il valore nullo della parte di potenziale relativa al carico è arbitrario; per esempio avremmo potuto scrivere − ∙ + invece di − ∙ . In questo caso la curva si sposterebbe rigidamente in direzione verticale, verso l’alto o verso il basso in funzione del segno di L0, ma lo spostamento corrispondente allo stato di equilibrio rimarrebbe . La forza ha energia potenziale − ∙ invece di − ∙ ∙ perché la forza non cresce con lo spostamento, ma durante quest’ultimo rimane costante. Questa parte di potenziale è dovuta al valore della forza ed alla sua capacità di spostarsi: non dipende in alcun modo dalle proprietà lineari della molla. In realtà potremo bypassare il Principio del Minimo dell’Energia Potenziale notando che se la forza crescesse lentamente fino al valore P, il lavoro da essa prodotto verrebbe immagazzinata come energia di deformazione. Quindi, poiché ∙ = , allora: ∙ ∙ = ∙ ∙ da cui = [3.2.4] A cura di Filippo Bertolino: marzo 2014 Pag 2 Università degli Studi di Cagliari - Facoltà di Ingegneria e Architettura Metodi agli Elementi Finiti - (AA 2013/’14) Comunque questo metodo fornisce solo un’equazione anche quando ci sono numerosi gradi di libertà e quindi non è molto utile. 3.3 Numerosi gradi di libertà Se per definire la configurazione di un sistema sono necessari n quantità indipendenti, si dice che il sistema possiede n gradi di libertà (GdL). Le n quantità si chiamano “COORDINATE GENERALIZZATE”. In un dato problema non è necessario che i GdL siano tutti dello stesso tipo, per esempio alcuni possono essere spostamenti lineari, altri possono essere rotazioni oppure deformazioni. Esprimiamo L’ENERGIA POTENZIALE di un sistema in funzione delle coordinate generalizzate : = , Quindi differenziando rispetto agli spostamenti abbiamo: = "#$ "%& ∙ + "#$ "%' ∙ + ⋯+ "#$ "%( ∙ ,⋯, ! =) ! "#$ + "% * ∙ [3.3.1] Perché la funzione sia stazionaria la variazione deve essere nulla, per ogni insieme di spostamenti infinitesimi ammissibili. Ciò può verificarsi solo se il coefficiente che moltiplica ogni variazione è nullo. Quindi deve risultare: "#$ "%& =0 i = 1, 2, …, n $ )"% * = 0 "# o in altri termini, & [3.3.2] In accordo con il PRINCIPIO DEL MINIMO DELL’ENERGIA POTENZIALE, l’equazione (3.3.2) definisce la configurazione di equilibrio del sistema. Le incognite sono le n coordinate generalizzate; abbiamo un numero di equazioni pari al numero di incognite, quindi possiamo pensare di ottenere una soluzione. Per esempio, consideriamo un sistema con 2 GdL (Fig.3.3.1). L’asta orizzontale è rigida e senza peso. Le coordinate generalizzate necessarie per descrivere la configurazione deformata sono la traslazione d e la rotazione θ. Poniamo d = θ = 0 quando le molle non sono tese. Se le rotazioni sono piccole possiamo scrivere (,-. / ≈ /) : = ∙ ∙ ∙ +/∙ + ∙ ∙ +/∙ Differenziando rispetto ai gradi di libertà abbiamo: "#$ "% "#$ "1 = = + ∙ ∙ ∙ + +/∙ ∙ − − − +/∙- =0 ∙- =0 ∙ 3∙) * = ) * ∙ ∙/ [3.3.3] L k1 P a che in forma matriciale si può scrivere nel modo seguente: 2 ∙ k2 d θ [3.3.4] Fig.3.3.1 – Sistema con due gradi di libertà La matrice quadrata è una matrice di rigidezza ed il sistema è del tipo: prendono il nome di FORZE GENERALIZZATE. ∙ = . I termini P e ∙- Da questo esempio possiamo trarre le seguenti conclusioni, di carattere generale: 1) La matrice di rigidezza di un sistema che lega i carichi lineari agli spostamenti è simmetrica; cioè 4 = 4 . Ciò avviene perché ogni copia di coefficienti disposti fuori della diagonale proviene da un unico termine di la cui forma è il prodotto di una costante per gli spostamenti generalizzati ∙ 4; 2) Ogni equazione "%$ = 0 è un’equazione di equilibrio. Nell’esempio preso in considerazione, le "# & equazioni si possono ottenere considerando l’equilibrio delle forze verticali e dei momenti intorno al bordo sinistro: A cura di Filippo Bertolino: marzo 2014 Pag 3 Università degli Studi di Cagliari - Facoltà di Ingegneria e Architettura Metodi agli Elementi Finiti - (AA 2013/’14) ∑ 67 = ∙ + ∙ + / ∙ − = 0 ∑ 89 ! = ∙ +/∙ ∙ − ∙- =0 3) Il prodotto di ogni spostamento generalizzato per la corrispondente forza generalizzata ha come unità di misura il lavoro o l’energia. In effetti, premoltiplicando l’eq.( 3.3.4) per il vettore trasposto della soluzione si ottiene un’equazione scalare che esprime il bilancio energetico: + ∙ / ∙2 ∙ 3∙) *− ∙ / / ∙) Eseguendo i prodotti e dividendo per due otteniamo: ∙ ∙ + ∙ ∙ + ∙/ = ∙ ∙ ∙- +-∙/ *=0 Se si aggiunge una terza molla, la struttura diventa iperstatica, ma i due gradi di libertà d e θ sono ancora sufficienti a descrivere la configurazione deformata: dobbiamo ancora risolvere solo due equazioni. Poiché nel metodo del Minimo dell’Energia Potenziale le incognite indipendenti non sono le forze, l’indeterminazione statica non modifica la procedura. Consideriamo l’asta della Fig.3.3.2 che unisce i nodi i e j ed è inclinata, rispetto all’asse orizzontale, dell’angolo : : la sua sezione trasversale sia ; , la sua lunghezza ed il suo modulo di Young < . La =>? ∙@>? rigidezza risulta quindi pari a: = A ; dati gli spostamenti nodali B , C , B4 e C4 , la variazione di >? lunghezza dell’asta vale: = DB − B4 E ∙ FGH : 1 ∙ 2 L’Energia Potenziale Totale dell’asta ie-esima vale: = ∙ + DC − C4 E ∙ HI. : − L ∙ B − M ∙ C − L4 ∙ B4 − M4 ∙ C4 Le derivate parziali rispetto agli spostamenti valgono: "#$ "N> "#$ "O> "#$ "NP "#$ "OP = = = = ∙ ∙ ∙ ∙ ∙ −FGH : ∙ −HI. : ∙ FGH : ∙ HI. : −L =0 qj y,v −M =0 : ∙ FGH : : ∙ FGH : vj vi − L4 = 0 i ui x, u − M4 = 0 HI. : ∙ FGH : HI. : −HI. : ∙ FGH : −HI. : j uj pi Fig.3.3.2 – Elemento asta nel piano Possiamo scrivere le precedenti equazioni in forma matriciale: FGH S HI. : ∙ RR −FGH R Q−HI. : pj qi −FGH : −HI. : ∙ FGH : FGH : HI. : ∙ FGH : −HI. : ∙ FGH : −HI. : HI. : ∙ FGH : HI. : 3.4 Sforzi e deformazioni iniziali [da scrivere] 3.5 Espressione generale dell’Energia Potenziale L V B C U ∙ W X = WM X L4 U B4 U C M4 4 T Consideriamo il caso in cui su un materiale elastico lineare agiscano le 6 componenti di sforzo. Sforzi e deformazioni verranno indicati in forma vettoriale: Y ] A cura di Filippo Bertolino: marzo 2014 + + = YZ = ^Z Y7 ^7 Y[ ^[ \Z7 _Z7 \7[ _7[ \[Z _[Z [3.5.1] Pag 4 Università degli Studi di Cagliari - Facoltà di Ingegneria e Architettura Metodi agli Elementi Finiti - (AA 2013/’14) in cui si utilizza la definizione ingegneristica dello scorrimento: _Z7 = = B C b Gli spostamenti nelle direzioni x, y e z verranno indicati con il vettore: + Y = < ∙ "N "7 + "O "Z [3.5.2] ] − ] = < ∙ ] − Y La relazione sforzi – deformazioni può essere scritta nel modo seguente: in cui < indica la matrice simmetrica delle costanti elastiche che descrivono il comportamento di un materiale isotropo o anisotropo. Gli sforzi iniziali Y si manifestano se, per esempio, si impediscono le deformazioni meccaniche ] che nascono quando si riscalda un solido. [3.5.3] L’incremento dell’energia di deformazione per unità di volume causato dallo spostamento infinitesimo di un volume unitario è: c = Y + ∙ ] = YZ ∙ ^Z + Y7 ∙ ^7 + Y[ ∙ ^[ + \Z7 ∙ _Z7 + \7[ ∙ _7[ + \[Z ∙ _[Z [3.5.4] Non verranno prese in considerazione le variazioni di Y causate dalle variazioni della deformazione ] perché producono termini di ordine superiore: per esempio YZ + YZ ∙ ^Z ≅ YZ ∙ ^Z . Dall’eq. (3.5.4) concludiamo che: "ef "gh = YZ "ef "gi ; = Y7 ; ⋯ ; "ef "jkh = \[Z [3.5.5] Esprimendo le eq. (3.5.5) in forma matriciale e usando le eq. (3.5.3) otteniamo 6 equazioni: ) "gf * = Y = < ∙ ] + Y "e L’integrazione rispetto alle deformazioni fornisce: c =l < ∙ ] ∙ ^+l Y ∙ ^ = ∙ ] + La costante d’integrazione è superflua ed è stata scartata. ∙ < ∙ ] + ] Nel caso di stato di sforzo piano abbiamo: Y + da cui: = YZ Y7 \Z7 c = ∙ ] ; ∙ < ∙ ] 1 − ν ∙ ^Z ^7 ^[ _Z7 ∙ m−ν ∙@ 0 o]Z − 2 ∙ ν ∙ ]Z ∙ ]7 + ]7 + 2 ∙ + ] + = ^Z ^7 ^[ _Z7 [3.5.6] ; + ∙ Y [3.5.7] 1 −ν −ν 1 < = @ ∙ m−ν −ν 0 0 + ] +∙ Y = ^Z −ν −ν 0 ^7 1 −ν 0 n ∙ W ^ X + ^Z ^7 ^[ −ν 0 0 [ _Z7 0 0 2∙ 1+ν 1 + ν ∙ _Z7 p + o^Z ∙ YZ + ^7 ∙ Y7 + _Z7 ∙ \Z7 p −ν 0 −ν 0 n 0 0 0 2∙ 1+ν YZ Y7 _Z7 ∙ W 0 X= \Z7 [3.5.8] ∙@ ∙ Prima di procedere dobbiamo definire le forze di massa per unità di volume: 6 + = 6Z 67 6[ e le forze superficiali per unità di area che agiscono sulla superficie del solido : q + = qZ q7 q[ . Le componenti di 6 e q si considerano positive quando agiscono nella direzione positiva degli assi coordinati. Usando l’eq.( 3.5.7) scriviamo l’espressione dell’Energia Potenziale: = lOtu r ∙ ] + ∙ < ∙ ] + ] + ∙ Y s ∙ C + lOtu + ∙ 6 ∙ C + l9N + ∙ q ∙ H [3.5.7] Il primo integrale rappresenta il lavoro fatto dagli sforzi interni, immagazzinato in forma di energia di deformazione. Gli ultimi due integrali rappresentano il lavoro fatto (quindi una caduta del potenziale) A cura di Filippo Bertolino: marzo 2014 Pag 5 Università degli Studi di Cagliari - Facoltà di Ingegneria e Architettura Metodi agli Elementi Finiti - (AA 2013/’14) quando le forze di volume e di superficie si spostano nel verso concorde con il loro segno. Gli spostamenti presenti negli integrali sono valutati sulla superficie. 3.6 Proprietà dell’Energia Potenziale Stazionaria Questo capitolo ha due obiettivi: il primo è introdurre il “calcolo variazionale”, essenziale per uno studio rigoroso del metodo degli elementi finiti e per la formulazione delle proprietà degli elementi, senza la necessità di utilizzare un campo di spostamenti imposti. Il secondo obiettivo è dimostrare che una soluzione che si basa sull’energia potenziale stazionaria tende a soddisfare le condizioni di equilibrio come conseguenza automatica della procedura, purché siano soddisfatte le condizioni di compatibilità. Consideriamo una trave sottoposta ad un carico assiale distribuito Q, dove Q è funzione di x ed ha le dimensioni di una forza per unità di lunghezza [N/mm]. Lo stato di sforzo è monoassiale. L’espressione dell’Energia Potenziale è quindi: =l A@ ∙v w ∙;∙ x−l y∙B∙ x A "N "Z [3.6.1] dove A indica la sezione trasversale della trave. Imponiamo a priori che u sia una funzione continua e tale per cui si possa calcola l’integrale. In particolare zB⁄zx non deve mai diventare infinita. Per mezzo del calcolo delle variazioni cerchiamo il valore corretto della funzione B = B x che rende stazionario il potenziale . Ciò che otterremo è un’equazione differenziale dello spostamento u e certe condizioni al contorno da imporre alla soluzione. Una soluzione accettabile deve soddisfare le condizioni al contorno u = 0 in x = 0: si tratta di una condizione cinematica cioè un vincolo sulle condizioni al contorno. Poniamo che la funzione H = H x sia una funzione che soddisfi le stesse condizioni al contorno, ma per il resto indipendente dalla funzione u. Nella Fig.3.6.1 abbiamo indicato con linea tratteggiata alcune possibili curve H = H x . Se “c” è un numero arbitrario, allora B x + F ∙ H x è una configurazione deformata arbitraria e c = 0 indica la forma corretta. Se indichiamo con F un numero piccolo a piacere, allora B x + F ∙ H x indica una piccola variazione della configurazione deformata rispetto alla soluzione corretta B = B x . Che forma deve assumere la diventi infinitesima quando ci si allontana di deformata B = B x per cui la variazione del potenziale poco dalla stessa configurazione ? Per rispondere alla domanda iniziamo a scrivere il potenziale nella sua forma perturbata: + =l A@ ∙ v"Z + F ∙ "Zw ∙ ; ∙ x − l y ∙ B + F ∙ H ∙ x "N A "9 [3.6.2] Se dall’e.(3.6.2) sottraiamo l’eq. (3.6.1) e trascuriamo il termine d’ordine superiore v F ∙ "Zw , troviamo la variazione del potenziale nell’intorno di c = 0: = F∙l A@ ∙ 2 ∙ "Z ∙ "Z ∙ ; ∙ x − F ∙ l y ∙ H ∙ x "N A "9 Eseguiamo l’integrazione per parti: l A ∙ ∙ x = r"Z ∙ H x s − l "Z "Z A "N "9 "N A "' N "Z ' "9 [3.6.3] Q(x) x, u L ∙H x ∙ x [3.6.4] u, s u=u(x) s=s(x) In seguito all’applicazione delle condizioni al contorno (s = 0 quando x = 0), l’eq.(3.6.3) e l’eq.(3.6.4) danno luogo alla seguente equazione: x |#$ |} =l < A "N "9 ; "Z "Z x − l yH x = <; A "N A "Z ∙H − l r<; ' + ys ∙ H x ∙ x "Z A "' N Poiché per la configurazione deformata corretta B = B x il potenziale |#$ |} Fig.3.6.1 [3.6.5] deve essere stazionario, allora deve annullarsi, indipendentemente dal fatto che si tratti di un minimo, un massimo o un flesso. A cura di Filippo Bertolino: marzo 2014 Pag 6 Università degli Studi di Cagliari - Facoltà di Ingegneria e Architettura Metodi agli Elementi Finiti - (AA 2013/’14) Poiché H = H x è una funzione arbitraria sia per 0 < x < che nel punto x = L, allora |} può annullarsi solo se sono valide entrambe le condizioni: |#$ <; "N A "Z ∙H = 0 ; <; "' N "Z ' +y =0 [3.6.6] c c c Fig.3.6.2 La seconda è l’equazione differenziale che governa o descrive il problema. Si può notare che si tratta di un’equazione di equilibrio: infatti esaminando un cubetto infinitesimo su cui agisce la forza distribuita di trazione Q(x) e le azioni interne normali, per l’equilibrio delle forze orizzontale possiamo scrivere (vedi fig.): • 6Z = 2€ x + da cui: z€ ∙ x3 ∙ ; + y x ∙ x ∙ ; − € x ∙ ; = 0 zx y x + "• "Z =0 Per uno stato di sforzo monoassiale, possiamo scrivere la legge di Hooke: "N Y = < ∙ ] = < ∙ "Z; inoltre abbiamo € = Y ∙ ; da cui z€ z Y ∙ ; z <∙]∙; z B = = = <; zx zx zx zx x € x y x € x + z€ ∙ x zx Fig.3.6.3 La prima equazione si chiama “Condizione al contorno naturale” perché si forma al di fuori della procedura variazionale: essa afferma che nel punto x = L gli sforzi sono nulli; infatti: zB ∙H =;∙Y ∙H =0 zx Abbiamo un’equazione differenziale del secondo ordine e due condizioni al contorno (un vincolo e una condizione “naturale”), quindi è possibile trovare una soluzione per B = B x . <; Che relazione esiste tra il problema qui discusso ed il METODO DEGLI ELEMENTI FINITI ? La trave della fig.3.6.1 può essere modellata da una serie di n elementi “truss” (biella o tirante/puntone), ognuno di lunghezza a = L/n, sottoposti ai carichi nodali y ∙ -, dove y è il valore di Q nel nodo i-esimo. Con l’estremo sinistro incastrato, gli spostamenti nodali B arbitrari indicano una forma “perturbata”, analoga alle curve tratteggiate della figura 3.6.1. Dato un valore qualsiasi n, la curva continua e regolare B = B x viene approssimata da una serie di segmenti rettilinei, cioè con un’interpolazione polinomiale per tratti. La deformazione zB⁄zxcambia bruscamente da un segmento all’altro, ma non tende mai all’infinito. In questo modo quindi, sia nel problema continuo che nel suo analogo discreto, abbiamo soddisfatto le condizioni di compatibilità (la congruenza) e le condizioni al contorno sugli spostamenti considerando solo condizioni ammissibili. Se inoltre sono soddisfatte le equazioni differenziali dell’equilibrio per tutte le x e se sono soddisfatte le condizioni al contorno sugli sforzi (le condizioni al contorno naturali), allora abbiamo trovato la soluzione corretta. La soluzione del problema continuo soddisfa le equazioni di equilibrio (3.6.6), ma ciò non capita con la soluzione del problema discreto. La soluzione discretizzata è l’insieme degli spostamenti nodali ui che soddisfano le equazioni dell’equilibrio ai nodi: z ́ =0 zB Il simbolo ́ indica che i due problemi, quello continuo e quello discretizzato, sono diversi ed hanno potenziali diversi. Infatti non è detto che la soluzione discretizzata ui si sovrapponga perfettamente alla soluzione continua B = B x . Come il numero di elementi aumenta, la forma H = H x diventa regolare, ́ si avvicina a e gli spostamenti ui tendono a sovrapporsi a B = B x . Inoltre le equazioni di equilibrio nodale si trasformano nell’eq. (3.6.6), e la soluzione discretizzata diventa esatta invece che approssimata. A cura di Filippo Bertolino: marzo 2014 Pag 7 Università degli Studi di Cagliari - Facoltà di Ingegneria e Architettura Metodi agli Elementi Finiti - (AA 2013/’14) Per concludere, mettiamo in evidenza che se sono permessi solo spostamenti ammissibili, allora il metodo del potenziale stazionario soddisfa implicitamente le condizioni di equilibrio come conseguenza naturale della soluzione. Con una modifica della terminologia, le nostre osservazioni si applicano anche al metodo di Rayleigh-Ritz. Un’espressione come quella di si chiama funzionale per indicare che non è semplicemente una funzione degli spostamenti e delle sue derivate, ma dipende dal loro effetto integrato. Se è relativo al caso dell’elasticità piana e se si applica il metodo del calcolo variazionale, la condizione = 0 richiede che: a) Le equazioni differenziali dell’equilibrio siano soddisfatte all’interno del volume; b) Siano soddisfatte le condizioni di equilibrio al contorno, sui punti del confine dove non sono imposti gli spostamenti 3.7 Il metodo di Rayleigh-Ritz I problemi continui hanno un numero infinito di gradi di libertà perché ad ogni punto sono associati spostamenti indipendenti. Un modo per affrontare il problema consiste nel tentare di generare e risolvere un insieme di equazioni alle derivate parziali. Possibile evitare le difficoltà di questo metodo e ridurre il problema ad un numero finito di gradi di libertà se è disponibile un funzionale che governa il problema e se ci accontentiamo di una soluzione approssimata. Invece di generare equazioni ale derivate parziali, generiamo equazioni algebriche, in numero pari a quello delle coordinate generalizzate. In ciò che segue, come funzionale useremo solo , ma il metodo di Ritz-Rayleigh può essere applicato anche ad altri funzionali. Consideriamo un problema di elasticità bidimensionale. Un solido è soggetto a certe trazioni e spostamenti al contorno. Il nostro obiettivo è trovare una soluzione approssimata degli spostamenti in ogni punto. Per fare questo, con il metodo di Ritz-Rayleigh iniziamo costruendo una configurazione approssimata degli spostamenti: B = - ∙ „ x, … + - ∙ „ x, … + ⋯ + -† ∙ „† x, … ‰ [3.7.1] ƒ C = ‡ ∙ ℎ x, … + ‡ ∙ ℎ x, … + ⋯ + ‡† ∙ ℎ† x, … Si impone che ogni funzione „ e ℎ abbia derivate continue e che abbia una forma tale da soddisfare tutte le condizioni al contorno del problema, indipendentemente dai valori numerici che possono essere assegnati ai parametri - , …, -† , ‡ , …, ‡† . La congruenza interna è soddisfatta automaticamente perché le deformazioni dipendono dagli spostamenti attraverso le usuali relazioni ]Z = zB⁄zx, … , _Z7 = zB⁄z… + zC⁄zx . Quindi l’energia potenziale può essere espressa in funzione dei coefficienti - e ‡ : è il loro valore che determina il valore di , come avveniva nell’eq. (3.3.1) con lo spostamento di. I coefficienti - e ‡ sono le COORDINATE GENERALIZZATE: di conseguenza, i coefficienti - e ‡ che rendono stazionario sono determinati risolvendo un sistema di m + n equazioni algebriche del tipo: "#$ "N> =0 , "#$ "N> =0 [3.7.2] I coefficienti - e ‡ calcolati risolvendo il sistema (3.7.2) possono essere sostituiti nell’eq. (3.7.1). Di conseguenza lo spostamento è completamente definito e da esso è possibile calcolare sforzi e deformazioni. Le equazioni differenziali dell’equilibrio dovrebbero essere soddisfatte in ogni punto del continuo. L’equazione (3.7.2) “fa del suo meglio” per raggiungere questo risultato, ma in generale non ci riesce, perché il sistema dipende da un numero finito di gradi di libertà. Di conseguenza la soluzione è solo una approssimazione della soluzione esatta, ma può essere migliorata usando un numero maggiore di parametri - e ‡ . Come sempre, le equazioni (3.7.2) danno luogo ad un sistema di equazioni di rigidezza, che può essere scritto nella forma ∙ = , dove il vettore contiene i coefficienti - e ‡ . Non tutti i termini del vettore hanno le dimensioni dello spostamento. La forma che assume il vettore dipende dal campo di spostamento imposto e dal carico sulla struttura: esso contiene le forze generalizzate e mentre non tutte le Ri hanno come unità di misura la forza, le Ri e le Di hanno unità di misura tali che il loro prodotto RiDi ha come unità di misura il lavoro. Ciò è coerente con il concetto di lavoro virtuale, che afferma che se un sistema è in equilibrio, allora durante uno spostamento infinitesimo arbitrario dalla posizione di A cura di Filippo Bertolino: marzo 2014 Pag 8 Università degli Studi di Cagliari - Facoltà di Ingegneria e Architettura Metodi agli Elementi Finiti - (AA 2013/’14) equilibrio, il lavoro virtuale delle forze esterne è uguale al lavoro virtuale delle forze interne. In simboli, indicando con lo spostamento virtuale arbitrario, scriviamo: + equazione che esprime il lavoro virtuale. ∙ = + ∙ ∙ Consideriamo la mensola della figura 3.7.1, e trascuriamo i carichi termici, i carichi distribuiti e la deformazione causata dal taglio. Ricordando l’equazione della linea elastica: %' O %Z ' = %• %Z = • Z @∙‘ l’energia potenziale vale: = l ∙8∙ :−∑ := da cui • Z @∙‘ ∙C =l ∙ ∙ x−∑ @∙‘ @∙‘ ∙v %' O w %Z ' y, C x Fig. 3.7.1 ∙ x−∑ C x = - + - ∙ x + - ∙ x + -’ ∙ x ’ + ⋯ + -! ∙ x ! Imponiamo a priori un campo di spostamento di tipo polinomiale: P2 L L ∙ x ∙C =l •' P1 ∙C [3.7.3] [3.7.4] Poiché nel punto di coordinata x = 0 la mensola è incastrata, il campo di spostamento ammissibile deve essere tale per cui, in x = 0 deve valere: C = C ⁄ x = 0, di conseguenza i coefficienti - e - devono essere nulli. La derivata prima e seconda del campo di spostamento valgono rispettivamente: %O Z = 2 ∙ - ∙ x + 3 ∙ -’ ∙ x + ⋯ + . ∙ -! ∙ x !” [3.7.5] %Z = 2 ∙ - + 6 ∙ -’ ∙ x + ⋯ + . ∙ . − 1 ∙ -! ∙ x %' O Z %Z ' !” [3.7.6] Nel punto di coordinata x = L, dove è applicata la prima forza, lo spostamento vale: C x= C x=2 =- ∙ + -’ ∙ =- ∙ 2 ’ + ⋯ + -! ∙ + -’ ∙ 2 ! + ⋯ + -! ∙ 2 Nel punto di coordinata x = 2L, dove è applicata la seconda forza, lo spostamento vale: ’ = ∙ l D2 ∙ - + 6 ∙ -’ ∙ x + ⋯ + . ∙ . − 1 ∙ -! ∙ x ! -! ∙ − ∙ - ∙ 2 + -’ ∙ 2 ’ + ⋯ + -! ∙ 2 ! @∙‘ A Sostituendo nella eq.3.7.3 abbiamo: !” ! E ∙ x− ∙ - ∙ + -’ ∙ + ⋯+ [3.7.7] Se ci limitiamo ad esaminare il primo termine (cioè poniamo -’ = -– = ⋯ = -! = 0 abbiamo: A <∙— = ∙˜ 4∙- ∙ x− ∙ - ∙ − ∙ - ∙ 2 = 4- ∙ <— − −4 2 "#$ "š' da cui: da cui: da cui il campo di spostamento risulta: - = = 8- ∙ <— − & œ– ' •@‘ C x = ∙A +4 8<— Ricordando che il momento flettente vale: 8 x = <ž %' O Z %Z ' 8 x =2∙- ∙<∙ž = A cura di Filippo Bertolino: marzo 2014 −4 ∙ =0 ’ - ∙x , possiamo scrivere: +4 4 Pag 9 Università degli Studi di Cagliari - Facoltà di Ingegneria e Architettura Metodi agli Elementi Finiti - (AA 2013/’14) Il momento flettente risulta costante, indipendente dalla coordinata x. Usando i primi due termini, cioè - e -’ abbiamo: da cui: ed integrando: = = @Ÿ l @Ÿ l A A 2- + 6-’ x x− + -’ - 4- + 24- -’ x + 36-’ x ’ x−- = <ž 4 - + 24 - -’ + 48 ’ -’ − - I coefficienti - e -’ che rendono stazionario equazioni algebriche: "#$ "š' "#$ "š = <ž 24 - + 96 ’ -’ − - = da cui: -’ = A' & œ– ' –A' £ £ A & œ• ' ¤¥A –A' ¦ @Ÿ¦ •A' –A ¤¥A A' & œ– ' £ A & œ• ' ' –A ¦ @Ÿ¦ •A' –A ¤¥A •A –A' £ +4 +4 +4 + -’ 2 − -’ − -’ ’ ’ +8 ’ +8 = = =0 +8 ’ 24 3 ∙ )- * = ƒ -’ 96 ’ <ž 2 8 24 - 2 sono determinati risolvendo il seguente sistema di 2 = <ž 8 - + 24 -’ − che in forma matriciale diventa: − +4 +8 ’ =0 ¢ = ¤¥A§ & œ– ' ” –A§ & œ• ' @Ÿ ¨¥•A© ”ª¨¥A© •A© & œ• ' ” –A© & œ– ' ¤ @ŸA© =− ’ & œ• ' A ; •@Ÿ &œ @Ÿ ' La freccia, l’inclinazione della mensola ed il momento flettente valgono quindi: C x = : x = Z ' ’ & œ• ' A r –@Ÿ %O Z %Z 8 x = <ž = –@Ÿ r 3 %' O Z %Z ' Nel caso in cui le forze esterne valessero: a) Per 0 ≤ x ≤ b) Per C¬ ≤x≤2 t- }t C¬ t- }t − Z x = &œ ’ +8 ' xs − &œ ¤ = <ž 2- + 6-’ x = v = Z' @‘ ’ w x = @‘ v ¥ − x − Z xs ’ & œ• ' A – − &œ = , la freccia teorica varrebbe: v − Z ’ ' A' ' xw x + ¥w A Nelle seguenti tabelle e grafici riportiamo il confronto tra i valori esatti e quelli calcolati utilizzando solo un parametro (- ) oppure due parametri (- , -’ ). x L 2L x 0 L C¬ t- }t 7 6<ž ’ 7 ’ 2<ž 8¬ 3 A cura di Filippo Bertolino: marzo 2014 t- }t C}šu} 5 8<ž ’ 5 ’ 2<ž 8}šu} 5 4 5 4 <®® - 46.4 % -28.57 % <®® - -58.3 % 25 % C}šu} D- , -’ E <®®D- , -’ E 7 ’ 2<ž 0.0 % 9 8<ž ’ 8}šu} D- , -’ E 11 4 5 4 -3.57 % <®®D- , -’ E -8.3 % 25 % Pag 10 Università degli Studi di Cagliari - Facoltà di Ingegneria e Architettura Metodi agli Elementi Finiti - (AA 2013/’14) 2L 5 0 4 − - P P 0 3500 -0.5 3000 -1 2500 -1.5 2000 -2 M(a2) M(a2,a3) 500 v(a2,a3) -3.5 Mth 1000 v(a2) -3 - 1500 vth -2.5 4 P P 0 -4 -500 Come si può osservare, passando da un solo parametro a due, i risultati migliorano in modo significativo, specie nei valori della freccia elastica che con due parametri risulta quasi identica a quella teorica; viceversa i valori del momento flettente calcolato risultano ancora affetti da un errore non trascurabile. Esempio di applicazione del Metodo di Rayleigh-Ritz Mensola caricata con un carico distribuito L’energia potenziale del sistema vale: A =˜ A C <∙— ∙± ² ∙ x−˜ M∙C x ∙ x x 2 Come nell’esempio precedente, imponiamo a priori il seguente campo di spostamento: C x = - ∙ x + -’ ∙ x ’ dove sono stati eliminati i coefficienti - e - per soddisfare le condizioni al contorno. La derivata prima e seconda del campo di spostamento valgono rispettivamente: %O Z %Z %' O Z %Z ' = 2 ∙ - ∙ x + 3 ∙ -’ ∙ x q x = 2 ∙ - + 6 ∙ -’ ∙ x L L’energia potenziale del sistema risulta quindi pari a: = @∙‘ ∙ l 2 ∙ - + 6 ∙ -’ ∙ x A Sviluppando gli integrali abbiamo: ∙ x − M ∙ l - ∙ x + -’ ∙ x ’ ∙ x A = <ž 2 - + 6- -’ I coefficienti - e -’ che rendono stazionario equazioni algebriche: "#$ "š' "#$ "š + 6-’ ’ −M∙³ ’ 3 y, C - + – 4 -’ ´ sono determinati risolvendo il seguente sistema di 2 = <ž 4 - + 6 -’ − ∙A ’ = <ž 6 - + 12 ’ -’ − =0 ∙A© – =0 che in forma matriciale, dopo aver diviso le due equazioni per L, diventa: A cura di Filippo Bertolino: marzo 2014 Pag 11 Università degli Studi di Cagliari - Facoltà di Ingegneria e Architettura Metodi agli Elementi Finiti - (AA 2013/’14) - = da cui: -’ = » ¼∙½' M∙ · º 6 3 s ∙ )- * = ’ 12 ’ ¶M ∙ ¹ µ 4 ¸ 4 <ž r 6 ¥A » A' ¥A ¦ A' ¼∙½ © – @Ÿ¦ ¥A ¼∙½' – » » ¼∙½ ¥A © – ¥A @Ÿ¦ ¦ ¥A A' = @Ÿ – ∙A© ”’ ∙A© ⁄ –•A' ”’¥A' = ∙A ” ∙A @ŸA' La freccia ed il momento flettente valgono quindi: C x = - ∙ x + -’ ∙ x ’ = 8 x = <ž %' O Z %Z ' = =− Z' –@Ÿ 5 ª ∙A' –@Ÿ ∙A @Ÿ −2 x = <ž 2- + 6-’ x = La freccia ed il momento flettente teorici valgono rispettivamente: C¬ t- }t x = Z' –@Ÿ 6 −4 x+x 8¬ ∙A ªA v¥ t- }t − xw x = −x Nelle seguenti tabelle e grafici riportiamo il confronto tra i valori teorici e quelli calcolati utilizzando due parametri (- , -’ ). x L x 0 C¬ t- }t M – 8<ž 8¬ t- }t M 2 L C}šu} D- , -’ E <®®D- , -’ E 8}šu} D- , -’ E <®®D- , -’ E M – 8<ž 5M 12 −M ∙ 12 0 0% -16.7 % - vth v(a2,a3) vth v(a2,a3) 0 3.8 200 400 600 800 1000 0 200 400 600 800 1000 Ulteriori commenti sul metodo di Rayleigh-Ritz A questo punto si possono avanzare due domande molto importanti. a) Come scegliere le funzioni di spostamento (negli esempi precedenti di tipo polinomiale) ? A cura di Filippo Bertolino: marzo 2014 Pag 12 Università degli Studi di Cagliari - Facoltà di Ingegneria e Architettura Metodi agli Elementi Finiti - (AA 2013/’14) b) Quanto sarà corretta la soluzione ? Come indicato precedentemente, le funzioni di prova devono essere continue e devono soddisfare le condizioni al contorno di tipo cinematico. A parte questo, sembra che non ci sia una regola semplice e precisa che ci indichi quale tipo di funzione scegliere e a che punto terminare la serie. Immaginiamo che per risolvere un dato problema ripetiamo diverse volte il processo di Rayleigh-Ritz, aggiungendo ogni volta un termine alla serie delle funzioni di tentativo. In questo modo generiamo una sequenza di approssimazioni che converge verso il valore esatto dell’energia potenziale . Se il limite di , è ragionevole aspettarsi che il limite della corrispondente questa sequenza è il valore esatto di successione delle funzioni di spostamento sia la funzione di spostamento esatta. Per assicurarsi la convergenza verso il valore esatto di è necessario che le funzioni di prova siano “relativamente complete”. Ciò si ottiene se man mano che si aggiungono dei termini alle funzioni di prova, queste approssimano sempre meglio la funzione esatta e le sue derivate che compaiono nel . Ne segue che una serie infinita capace di rappresentare entro un dato dominio un qualsiasi campo di spostamento continuo sarà adeguata perché contiene, come caso speciale, le funzioni esatte. Possiamo affermare che le funzioni di forma dovrebbero essere troncate eliminando i termini di ordine più elevato invece che quelli di ordine più basso. Un argomento euristico a conferma di questa affermazione è il seguente. Supponiamo che la mensola sia caricata da un momento applicato nel suo punto estremo. Lo spostamento esatto ha la forma C x = - ∙ x . Infatti se usiamo come funzione di prova la seguente: C x = - ∙ x + -’ ∙ x ’ + ⋯ + -! ∙ x ! otteniamo l’esatto valore per - oltre che - = -’ = ⋯ = -! = 0. Se invece avessimo usato la funzione di prova:C x = -’ ∙ x ’ + ⋯ + -! ∙ x ! , avremmo approssimato molto bene la funzione esatta C x = - ∙ x , ma solo usando molti coefficienti. Ma come n tende all’infinito, non possiamo garantire la convergenza della serie al valore esatto , perché avere omesso il termine - ∙ x , impedisce che la serie sia relativamente completa. In questo caso ci si deve aspettare la convergenza verso un valore non corretto di . Circa il tipo di approssimazione fornita dal metodo di Rayleigh-Ritz, possiamo affermare che la soluzione approssimata è più rigida di quella esatta. La struttura può spostarsi solo nelle forme che si possono ottenere dalla sovrapposizione dei vari termini presenti nella funzione spostamento. La forma esatta dello spostamento è perciò esclusa, tranne in alcuni casi molto semplici ed eccezionali. In pratica abbiamo aggiunto dei vincoli che irrigidiscono la struttura. Questo argomento suggerisce l’osservazione che abbiamo ottenuto la soluzione esatta di un problema diverso; una struttura diversa nelle sue proprietà elastiche o di carico rispetto alla struttura reale ed in realtà creata dal metodo di soluzione. E’ utile riferirci ad un esempio concreto. L’energia potenziale della configurazione di equilibrio, in funzione del carico P e del corrispondente spostamento vale: = − =− da cui =− #$ Questa relazione è applicabile sia alla struttura reale che a quella creata dalla soluzione approssimata. Se definiamo la rigidezza k sotto il carico P come = ⁄ , possiamo scrivere: Rigidezza = =%=− ' #$ Energia di deformazione: = ' =− Se la forza P è un dato e lo spostamento che ne risulta è stato approssimato con il metodo di Rayleigh-Ritz, le equazioni ??? e la figura indicano che: 1) Poiché }šu}tuš¬t ≠ 9š¬¬t e D E 9š¬¬t è un minimo allora D E}šu}tuš¬t > D E 9š¬¬t . In altre parole, abbiamo ottenuto un limite superiore di . […] 2) La rigidezza calcolata K è troppo grande (è più grande di quella corretta) 3) L’energia di deformazione calcolata è troppo piccola (è più piccola di quella corretta), cioè abbiamo ottenuto ul limite inferiore dell’energia di deformazione. A cura di Filippo Bertolino: marzo 2014 Pag 13 Università degli Studi di Cagliari - Facoltà di Ingegneria e Architettura Metodi agli Elementi Finiti - (AA 2013/’14) Quando è applicato un solo carico, poiché l’energia di deformazione è sottostimata, possiamo affermare che }šu}tuš¬t < 9š¬¬t . Ma se agiscono numerosi carichi, possiamo solo affermare che il prodotto , ,⋯, ! + ∙ , , ⋯ , ! è sottostimato. Una soluzione che si basa sull’eq.(???) non è completamente soddisfacente. I coefficienti - , ⋯ , -! non hanno un chiaro significato fisico. Inoltre perché i due polinomi assumano lo stesso valore in x = L è necessario un certo lavoro algebrico. Perciò facciamo ciò che si fa normalmente con gli elementi finiti: scambiamo i coefficienti - , ⋯ , -! con gli spostamenti nodali. E’ questo scambio che rende relativamente semplice automatizzare il metodo e ci consente di scrivere un programma di calcolo automatico applicabile in generale. Consideriamo una trave rettilinea a sezione costante di rigidezza flessionale pari a EJ. I 4 gradi di libertà nodali sono gli spostamenti C , C e le rotazioni : , : , dove : = zC ⁄zx. E’ ragionevole imporre un campo di spostamento cubico, perché una cubica è definita da 4 parametri: C x = - + - ∙ x + - ∙ x + -’ ∙ x ’ [3.8.1] Perciò partiamo con l’eq. (3.8.1) e la scriviamo nella forma seguente: C x = 1 x x x ’ ∙ À- Á = x + ∙ -’ Differenziando abbiamo: : x = a) per x = 0 "O Z "Z = 0 1 2x 3x :=: C=C e Quindi usando le seguenti 4 condizioni al contorno: b) per x = C=C e ∙ À- Á -’ [3.8.3] :=: C 1 0 0 0 : 0 1 0 0 m n ∙ À- Á = ÀC Á ’ 1 -’ : 0 1 2 3 abbiamo: [3.8.2] ; ∙ - = oppure [3.8.4] Quindi C x può essere espresso non più in funzione dei coefficienti - , - , - , -’ , ma in funzione dei gradi di libertà nodali : dove: - = ; ” ∙ C x = x da cui ; da cui: € + = ƒ1 − 3x + + ∙ - = x + ∙ ; ” 1 0 0 0 S 0 1 0 0V R 3 2 3 1U R U − − − = R U 1 2 1U R 2 − ’ T Q ’ ” 2x ’ ’ ; x− 2x + x’ ∙ = € + ∙ [3.8.5] 3x 2x ’ x x’ ; − ’ ; − + ¢ Le funzioni che compaiono al’interno del vettore € si chiamano FUNZIONI DI FORMA. A cura di Filippo Bertolino: marzo 2014 Pag 14 Università degli Studi di Cagliari - Facoltà di Ingegneria e Architettura Metodi agli Elementi Finiti - (AA 2013/’14) Per il momento abbiamo solo iniziato la procedura di soluzione, in quanto l’equazione (3.8.5) semplicemente definisce il campo di spostamento imposto C = C x in funzione dei parametri . Ma i passi successivi sono semplici e verranno illustrati con un esempio. Vediamo come possiamo risolvere con una procedura agli elementi finiti l’esempio già illustrato e risolto con il metodo di Rayleigh-Ritz. Il problema precedente è illustrato a lato con i gradi di libertà adeguati per una soluzione agli elementi finiti. Le condizioni al contorno in x = 0 sono soddisfatte ponendo C = : = 0 e ciò può essere fatto dopo avere assemblato le eqauzioni algebriche che governano il problema. La continuità degli elementi nel nodo n.2 è imposta dall’uso di C e : come gradi di libertà dei due elementi che si uniscono nel nodo n.2. : C : P2 P3 y, C C’ L C L x :’ Fig.3.8.1 Rimangono 4 gdl da calcolare imponendo la condizione = 0, come è già stato fatto con la soluzione che si basava sull’eq.(3.8.1); in realtà le curve C = C x definite con le due soluzioni sono esattamente le stesse. z C x = à zx La curvatura dell’elemento vale: dove à + = 0 6x ∙ ; 0 2 = )− A' + ¥ ” L’energia potenziale del sistema vale: =l Poiché: ± l’energia potenziale vale: in cui: = 1 ∙ 2 + A ∙ ³˜ à ∙ < ∙ — ∙ à + = C1 + A @∙‘ C ² = x ∙ x´ ∙ :1 C2 :2 Nel capitolo successivo vedremo che l’integrale: + Z + ∙ ; − A + A' ; – ¥Z ¥ A' ∙ v%Z ' w ∙ x − ∑ %' O + 1 ∙ 2 ∙ à ∙ à + + − A Z [3.7.3] ∙ A + A ˜ à ∙<∙—∙ à + ¥Z ∙C ∙ ³˜ à ∙ < ∙ — ∙ à e ; − A + A * = C2 ∙ x + ∙ x´ ∙ − :2 C3 :3 ∙C − ’ ∙ C’ non è altro che la matrice di rigidezza [k] dell’elemento. In questo esempio ogni elemento [k] è una matrice 4 x 4 e poiché i due elementi sono uguali abbiamo [k1] = [k2]. L’assemblaggio delle due matrici si ottiene aggiungendo due righe e due colonne di zeri alla fine della matrice [k1] e altrettanti all’inizio della matrice [k2]. Così, dato lo spostamento + dei nodi della struttura : = C1 :1 C2 :2 C3 :3 , possiamo scrivere: = 1 2 + ∙ Ä2 0 0 0 3+2 0 0 0 3Å ¥Z¥ ∙ − + ∙ 0 ·0º Æ Æ ¶0¹ Æ ’Æ µ0¸ = 1 2 + ∙ ∙ − + ∙ La somma delle due matrici è la matrice di rigidezza della struttura [K]. Il sistema di sei equazioni A cura di Filippo Bertolino: marzo 2014 Pag 15 Università degli Studi di Cagliari - Facoltà di Ingegneria e Architettura Metodi agli Elementi Finiti - (AA 2013/’14) consente di calcolare il vettore A cura di Filippo Bertolino: marzo 2014 z z che rende ƒ z ¢= 0 z stazionario: = ∙ − = 0 Pag 16
© Copyright 2026 Paperzz