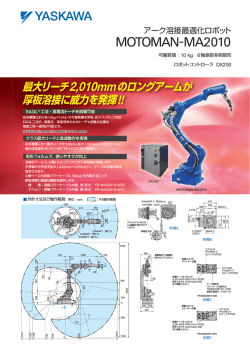
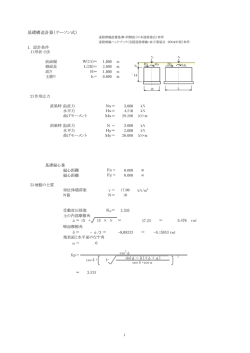
フィードバック制御系の設計� 前章までに学んだことを踏まえ, – 安定性,減衰性,速応性,定常特性を用いて, 制御系の設計仕様を定量的に表現できる – 補償要素を加えることによって,設計仕様を 満たす制御系を設計できる • 直列補償 • フィードバック補償� 1 閉ループ特性に対する設計仕様� • フィードバック制御系を評価する特性 – 安定性�(もっとも大事) – 減衰性 – 速応性 – 定常特性 • 制御系の設計においては、これらの特性 をある指標で指定 – 時間応答仕様 – 周波数応答仕様 – 極零点仕様 2 時間応答仕様� 過渡特性� Os : Os :行き過ぎ量� 定常特性� ±5% c� 0.9c� lim e(t) : 定常偏差� t→∞ Td : 遅れ時間� 0.5c� Ts :整定時間� 0.1c� 0� Tr :立上がり時間� ステップ応答� t� 3 周波数応答仕様� |G(j )| MP� 1� 1 2 0� p b 4 設計仕様� 閉ループ特性 開ループ特性 時間特性 周波数特性 周波数特性 減衰性 Os Mp GM, PM 速応性 Td , Tr ωb ωc 定常特性 εp , εv , εa K 5 極零点仕様� • 閉ループ伝達関数の次数がn次 – 特性に主に影響を与える、原点に近い極だ けを考える ±j – その極が共役複素数 s1,2 = • 複素共役根をもつ2次系で近似可能な場合 – この主要極s1, s2によってシステムの��������� ωn 求める仕様を指定 γ −α jβ 0 6 閉ループ特性に対する設計仕様� 閉ループ伝達関数を2次系で近似 2 s1 s2 n Go (s) = = s2 + 2 = (s + + n2 (s s1 )(s s2 ) 2 + 2 + = 2 j )(s + + j ) s +2 s+ ns 2 ±j s1,2 = 固有周波数 減衰率 2 = = + = cos n ωn γ 2 −α 2 2 + 2 jβ 0 n 7 閉ループ特性|減衰性� ts = p = パラメータ 極零点� ζ(減衰率)� 時間領域� Os(行き過ぎ量)� 周波数領域� Mp(周波数応答の最大値)� 2 1 n 設計仕様 1 のとき, Os = exp n 2 2 (共振周波数)のとき Mp = 1 1 2 1 28 2 閉ループ特性|減衰性� パラメータ� サーボ系(追値制御)� プロセス系(定値制御)� ζ 0.6〜0.8� 0.2〜0.4� Os 0〜25%� Mp 1.1〜1.5(通常1.3程度)� Os , Mp は の関数 時間特性の仕様から周波数特性上で設計可� 9 閉ループ特性|速応性� 設計仕様� パラメータ� 極零点 ωn(固有振動数)� Td (遅れ時間) 時間領域� Ts (立ち上がり時間) 周波数領域� Td ωb�(閉ループ遮断周波数)� b b Tr b 整定時間Tsは減衰性にも速応性にも関連するパラメータ� 振幅の包絡線 e nt = 0.05 となる t = Ts を求めると Ts 3 10 n 閉ループ特性|定常特性� 設計仕様� パラメータ� 極零点 εp (定常位置特性) εa (定常速度特性) εd (定常加速度特性) 時間領域� 周波数領域� 開ループ伝達関数で決まる • 積分項を何個持っているか Ø 何形の制御系か • ゲイン定数K� 11 開ループ特性に対する設計仕様� • 閉ループ特性上の仕様が与えられたとこ ろで、これを満たす制御系の設計に • 開ループ伝達関数G(s)は定まっている • ゲイン調整を行ったり、補償要素の伝達関 数Gc(s)を決める�=�制御系の設計 • 開ループ特性上で周波数特性(ボード 線図)によって設計する 12 開ループ特性に対する設計仕様� gdB [dB]� K( = 0) 大:定常偏差小 c 0 大:速応性向上 GM� φ [deg]� 0 PM� −180 大:減衰性向上 13 制御系の設計(周波数応答法)� • 直列補償 補償要素 Gc(s) を制御対象 Gp(s) と直列に付 加して,設計仕様を満たすように設計する – ゲイン補償(調整) – 位相遅れ補償 – 位相進み補償 – 位相遅れ進み補償� 補償要素� 制御対象� +− Gc (s) G p (s) 14 ゲイン補償(調整)� gdB [dB]� K大� 0 与えられた 開ループ伝達関数� c K小� c φ [deg]� 0 −180 PM� -180° 越え 不安定� 開ループ伝達関数のボード線図� Gc (s) = K 位相特性を変化させ ずにゲイン特性を � 20 log K dB増加� K < 1のとき� PMが増加し安定するが, ωcは低下し速応性は劣化� K > 1 のとき� ωcは高くできるが,PMは減 少し不安定になる� 15 例題� 開ループ伝達関数が K G(s) = s(1 + 0.5s)(1 + 0.2s) で与えられる閉ループ系の位相余裕を PM=30° にするゲイン定数Kの値を求めよ 補償要素 Gc(s) +− K� 制御対象Gp(s) 1 s(1 + 0.5s)(1 + 0.2s) 16 ボード線図を描く� c = 1.8[rad/sec] -7� PM=30°� -150� ゲインを7dBあげてよい� K=2.24� 17 ボード線図を描く� c = 1.8[rad/sec] -7� PM=30°� -150� ゲイン交差周波数も変化� 18 速応性、定常偏差に影響� ステップ応答� ゲイン補償前� ゲイン補償後� 19 例題� 開ループ伝達関数が K G(s) = s(1 + 0.5s)(1 + 0.2s) で与えられる閉ループ系が安定で、かつ 定常速度偏差が0.1以下となるKを求めよ 補償要素 Gc(s) +− K� 制御対象Gp(s) 1 s(1 + 0.5s)(1 + 0.2s) 20 例題� • 閉ループ伝達関数 G(s) K Go (s) = = 1 + G(s) 0.1s3 + 0.7s2 + s + K • 特性方程式は 0.1s3 + 0.7s2 + s + K = 0 • フルビッツの安定判別法より D= a1 a3 a0 a2 • すなわちK<7� = 0.7 K 0.1 1 = 0.7 0.1K > 0 21 例題� • 開ループ伝達関数の積分の次数は1 • 1形の制御系の定常速度偏差は v 1 = K 0.1 • すなわちK≥10 • 二つの特性を満足するKは存在しない� 22 位相遅れ補償� 補償要素Gc(s) 1 + saT Gc (s) = , a<1 1 + sT 低周波領域でのゲインを高周波領域のゲインに 比べて大きくする – 減衰性、速応性� ⇒�影響なし – 定常特性� ⇒�改善� 補償要素� 制御対象� +− Gc (s) G p (s) 23 位相遅れ補償� 1 + saT Gc (s) = , a<1 1 + sT 1 + saT gdB [dB]� 0 折れ点周波数� • 1次遅れ要素�� 20 log a m 1 aT φ [deg]� 0 1 T φm 位相遅れ要素のボード線図� 1 1 + sT � • 1次進み要素� 1 T 1 aT ゲイン� • 低周波領域 �0[dB] • 高周波領域� gc = 20 log a = 20 log |Gc (j )| 24 1 aT 位相遅れ補償� 1 + saT gdB [dB]� 0 1 + saT Gc (s) = , a<1 1 + sT 位相特性� � m 20 log a m 1 aT (1 + j aT ) (1 + j T ) 位相が最小値になる角周波数 ωm(折点周波数の中間)とその ときの位相φm m φ [deg]� 0 1 T 1 1 + sT = m = T1a = sin 1 a 1 a+1 φm 位相遅れ要素のボード線図� 25 位相遅れ補償� 1 + saT gdB [dB]� 0 20 log a m 1 aT φ [deg]� 0 1 T φm 1 1 + sT 1 + saT Gc (s) = , a<1 1 + sT 1. 位相余裕PMや速応 性を示す指標ωcなど の仕様がすでに満足 2. 位相遅れ要素Gc(s)を 制御対象Gp(s)に直列 に付加� 3. 高周波領域のゲイン がgc低下� 4. ゲイン調整により、gc だけ一様に上げる� 位相遅れ要素のボード線図� 26 位相遅れ補償� 1 + saT Gc (s) = , a<1 1 + sT 1 + saT gdB [dB]� 0 低域のゲインのみ上げて 定常特性を向上� 20 log a m 1 aT φ [deg]� 0 1 T 1 1 + sT � 低域の位相は遅れるが十 分に余裕があり,減衰性,速 応性にはほとんど影響を与 えない� φm 位相遅れ要素のボード線図� 27 位相遅れ補償� • 閉ループ系が不安定な場合でも、補償に よって位相余裕と定常偏差の仕様を満足 するように設計が可能 1. 定常偏差を満たすようにゲイン調整 2. 位相遅れ補償により、高周波領域のゲイン をgcだけ低下させて、位相余裕を改善 28 例題(位相遅れ補償)� 開ループ伝達関数が K G(s) = s(1 + 0.5s)(1 + 0.2s) で与えられる閉ループ系の位相余裕PM=40°、 定常速度偏差εv≤0.1となるように補償要素を 設計せよ 補償要素 Gc(s) +− Gc(s) 制御対象Gp(s) K s(1 + 0.5s)(1 + 0.2s) 29 例題(位相遅れ補償)� • 開ループ伝達関数の積分の次数は1 • 1形の制御系の定常速度偏差は v 1 = K 0.1 K≥10 • K=10と定めたときのボード線図を描く • 以下の教科書のボード線図は折線近似で描 いているので、値が少しずれていることに注意 30 K=10のときのボード線図� K=10� 20dB上昇� K=1� 位相遅れ回路での高周波 領域での位相遅れは10° 程度余裕をみて� PM = 40+10 = 50°� とする� ゲイン交差周波数� 4.4[rad/sec]� PM=50°� 補償後のゲイン交差周波数� 1.1[rad/sec]� −15°⇒不安定� 31 位相遅れ補償器の特性� |Gp (j1.1)| = 18[dB] ゲイン交差周波数でのゲ インを0[dB] 位相遅れ補 償器の高域でのゲインは� 20 log a = -18[dB] a=0.126� 補償器の特性� 折点周波数 1/aT は ゲイン 交差周波数の1/8〜1/10 に 設定されるので,ここでは � 0.14 [rad/sec] とする� 0.14� 32 位相遅れ補償器� • 位相遅れ回路の折点周波数1/aTを 0.14[rad/sec]とする 1 1 aT = = = 7.14 0.14 7.14 T = = 56.7 0126 • すなわち位相遅れ回路の伝達関数は 1 + 7.14s Gc (s) = 1 + 56.7s PM = 44°� • 設計仕様をほぼ満たす 33 位相遅れ補償後の特性� 位相遅れ補償後の特性� PM = 44°� 34 ステップ応答� 位相遅れ補償後� 位相遅れ補償前� 35 ランプ応答� 位相遅れ補償後� 位相遅れ補償後� 位相遅れ補償前� 等速度入力� 位相遅れ補償前� 36 位相進み補償� 補償要素Gc(s) 1+s T Gc (s) = , >1 1 + sT ゲイン交差周波数ωc付近の位相を進めて適当 な位相余裕を確保する – 速応性� ⇒�改善 補償要素� 制御対象� +− Gc (s) G p (s) 37 位相進み補償� 1+sαT� 1+s T Gc (s) = , 1 + sT gdB [dB]� 20 log 折れ点周波数� • 1次遅れ要素�� 0� 1 T m 1 T 1 1 + sT φ [deg]� m 0� 位相進み要素のボード線図� � • 1次進み要素� <1 1 T 1 T ゲイン� • 低周波領域 �0[dB] • 高周波領域� gc = 20 log a = 20 log |Gc (j )| 38 1 aT 位相進み補償� 1+sαT� gdB [dB]� 20 log Gc (s) = 1+s T , 1 + sT >1 位相特性� � 0� 1 T m 1 T 1 1 + sT 位相が最小値になる角周波数 ωm(折点周波数の中間)とその ときの位相φm m φ [deg]� m m = T1 = sin 1 1 +1 0� 位相進み要素のボード線図� 39 位相進み補償� 1+sαT� gdB [dB]� 20 log 0� 1 T m 1 T 1 1 + sT φ [deg]� m 0� 位相進み要素のボード線図� Gc (s) = 1+s T , 1 + sT >1 ゲイン交差周波数ωc 付近にωmを設定 1 1 < c< T T • ゲイン交差周波数 ωc’が大きくなる • 移動したゲイン交 差周波数ωc’におけ る位相余裕も確保 速応性の向上� 40 例題� 開ループ伝達関数が K G(s) = s(1 + 0.5s)(1 + 0.2s) で与えられる閉ループ系の位相余裕PM=40°、 ゲイン交差周波数ωc=4.4[rad/sec]となるように 補償要素を設計せよ 補償要素 Gc(s) +− Gc(s) 制御対象Gp(s) K s(1 + 0.5s)(1 + 0.2s) 41 例題� • ゲイン調整でωc=4.4にするにはK=10 • このときの位相が−197°なので不安定 • 位相余裕PM=40°を満たすためにはωc付近 で57°位相を進めさせる必要 φm=40°+(197°−180°) = 57° 1 sin m = = 0.84 +1 1 = 11.5 4.4 = 14.9 m = T 1 = 1.30 T = 11.5 42 例題� 希望のゲイン交差周波数� 4.4[rad/sec]� 補償前のゲイン交差周波数� 43 ωc=4.4にゲイン調整� K=10� K=1� 希望のゲイン交差周波数� 4.4[rad/sec]� 57°進める� PM=40°� −197°� 補償前のゲイン交差周波数� 44 位相余裕を満たす補償器� 位相進み補償器により、ωc=4.4[rad/sec]付近 の位相を57°進ませる その位相進み補償器の伝達関数は 1 + 0.769s Gc (s) = 1 + 0.067s 45 位相進み補償器を設計� K=10� K=1� 希望のゲイン交差周波数� 4.4[rad/sec]� 57°進める� ωc=4.4付近で 57°進ませる 位相進み要素� 1 + 0.769s Gc (s) = 1 + 0.067s PM=40°� −197°� 補償前のゲイン交差周波数� 46 位相進み補償器を使用� ゲイン交差周波数が ωc=8.5に移動� K=10� 10dB� ゲインを10dB 下げればよい� K=1� 希望のゲイン交差周波数� 4.4[rad/sec]� 57°進める� ωc=4.4付近で 57°進ませる 位相進み要素� 1 + 0.769s Gc (s) = 1 + 0.067s PM=40°� −197°� 47 ゲイン交差周波数を補正� • ゲイン交差周波数がωc’=8.5[rad/sec]に変化 ⇒�仕様の4.4[rad/sec]にするためにゲイン調整 により10[dB]ゲインを下げる K K = 3.16 10[dB] = 20 log 10 48 ゲイン調整によりωc=4.4に� ゲイン交差周波数が ωc=8.5に移動� K=10� K=3.16� K=1� 希望のゲイン交差周波数� 4.4[rad/sec]� PM=40°� 49 位相進み補償によるステップ応答� 位相進み補償後� 位相進み補償前� 減衰性と速応性の仕様を満足 50 位相進み遅れ補償� 補償要素Gc(s) 1 + s Ta1 1 + saT2 Gc (s) = · , a < 1, T1 < T2 1 + sT1 1 + sT2 低周波領域に折点周波数をもつ位相遅れ回路 高周波領域に折点周波数をもつ位相進み回路 減衰性、速応性、定常特性の 仕様をすべて満たすように補償� 補償要素� 制御対象� +− Gc (s) G p (s) 51 位相進み遅れ補償� • まず、位相進み補償か位相遅れ補償を適用 • 仕様を満足させないときにさらに位相遅れ 補償、または位相進み補償を適用 • 定数a, T1, T2の決定法は位相遅れ補償や 位相進み補償での決定法と同じ 52 例題8.4� 図に示されるフィードバック制御系について 答えよ� +− Gc (s) Gp (s) 53 例題8.4(a)� 制御対象のボード線図が 右図であるとき、伝達関数 Gp(s)を求めよ。なお、Gp(s)は s=0に1次の極をもつ� � 角周波数(rad/sec)� 54 例題8.4(a)� 折点周波数はω=2, 10[rad/sec] ゲイン特性の傾きは ω < 2では−20[dB/dec] 2 ≤ ω ≤ 10では−40[dB/dec] ω > 10では−60[rad/dec] すなわち積分要素に加えて 一次遅れ要素が2個 角周波数(rad/sec)� 55 例題8.4(a)� Gp (s) は 積分要素 K s 1 1 次遅れ要素 1 + sTa 1 1 + sTb から成る。すなわち K Gp (s) = s(1 + sTa )(1 + sTb ) 角周波数(rad/sec)� 56 例題8.4(a)� 折点周波数より 1 = 0.5 2 1 Tb = = 0.1 10 Ta = また, = 2[rad/sec] のときゲインが 1, すなわち 0dB であるので, K K = =1 j 0 j2 より K = 2。よって Gp (s) = 2 s(1 + 0.5s)(1 + 0.1s) 角周波数(rad/sec)� 57 例題8.4 (b)� 開ループ伝達関数の ボード線図が右図の 赤の実線であり、補償 回路の伝達関数が G (s) = 10(1 + sT2 )(1 + sT4 ) c (1 + sT1 )(1 + sT3 ) であるときの定数T1, T2, T3, T4を求めよ� ゲイン� 角周波数(rad/sec)� 58 例題8.4 (b)� 開ループ伝達関数の ボード線図が右図の 赤の実線であり、補償 回路の伝達関数が G (s) = 10(1 + sT2 )(1 + sT4 ) c (1 + sT1 )(1 + sT3 ) であるときの定数T1, T2, T3, T4を求めよ� 位相� 角周波数(rad/sec)� 59 例題8.4 (b)� 新たな折点周波数は 0.02, 0.2, 1, 5[rad/sec]。 ゲイン� • 0.02 < ω < 0.2では 傾きが増大 • 1 < ω < 5では減少 • 低周波領域では位 相の遅れ • 高周波領域では位 相の進み� 角周波数(rad/sec)� 60 例題8.4 (b)� 新たな折点周波数は 0.02, 0.2, 1, 5[rad/sec]。 位相� • 0.02 < ω < 0.2では 傾きが増大 • 1 < ω < 5では減少 • 低周波領域では位 相の遅れ • 高周波領域では位 相の進み� � 角周波数(rad/sec)� 位相進み遅れ補償� 61 例題8.4 (b)� 各定数は折点周波数 より� T1 = T2 = T3 = T4 = ゲイン� 1 = 50 0.02 1 =5 0.2 1 = 0.2 5 1 =1 1 角周波数(rad/sec)� 62 例題8.4 (b)� ゲイン余裕� GM 15[dB] ゲイン-位相図� 10[dB] 角周波数(rad/sec)� 63 例題8.4 (b)� ゲイン余裕 GM 15[dB] 10[dB] 位相余裕 P M 33 39 ゲイン交差周波数� 2[rad/sec] 4[rad/sec] c ゲイン� 角周波数(rad/sec)� 64 ステップ応答� 位相進み遅れ補償後� 補償前� 減衰性と速応性が改善 65 ランプ応答� 位相進み遅れ補償後� 等速度入力� 補償前� 定常速度偏差が減少⇒定常特性が向上� 66 フィードバック補償� 補償要素をフィードバック要素として用いるも のだが、以下のように等価変換できるので、 直列補償と同様に扱うことができる� +− G1 (s) + − G2 (s) Gc (s) +− 1 1+ Gc (s)G2 (s) G1 (s) G2 (s) 67 例題 8.5� 下図の制御系が次の設計仕様を満たすよう に K および KT を定めよ. ① 減衰率 ζ = 0.5 ② 定常速度偏差 εv ≤ 0.05� R(s) +− E(s) K� +− 10 s(s + 1) C(s) sKT 68 例題 8.5:解答例� ブロック線図を等価変換する� R(s)� E(s)� +− R(s) G(s)� 10K s2 + s(1 + 10KT ) C(s)� C(s) 10K s2 + s(1 + 10KT ) + 10K Go (s) 69 例題 8.5:解答例� 2次系の一般形と対応させると 2 10K n 2 s + s(1 + 10KT ) + 10K s2 + 2 n s + n 2 n2 = 10K, 2 n = n = 1 + 10KT = 10K 定常速度偏差は� v 1 = lim sE(s) · 2 = lim s 0 s 0 s 1 1 · 10K s 1+ 2 s + s(1 + 10KT ) 1 + 10KT = 0.05 10K 1 = lim 10K s 0 s+ s + 1 + 10KT 70 例題 8.5:解答例� まとめると� 1 + 10KT = 10K 1 + 10KT 0.5K 10K 0.5K より K また、1 + 10KT "$1+10K = 10K T # $%1+10KT ≤ 0.5K 40 400 = 20 より KT 1.9 71 例題 8.5:ステップ応答� K=50, KT = 2� 72 例題 8.5:ランプ応答� K=50, KT = 2� 73 PID制御器� 比例(Propotional)動作、積分(Integral)動作、微 分(Derivative)動作で構成される制御器 t u(t) = KP e(t) + KI 0 伝達関数 de(t) e( )d + KD dt 1 Gc (s) = KP + KI + KD s s 1 = KP 1 + + TD s TI s PID制御器 +− GP ID (s) 制御対象 Gp (s) 74 PID動作� PID制御器の伝達関数 1 GP ID (s) = KP + KI + KD s s – 比例ゲイン:ゲイン調整 – 積分ゲイン:低周波領域でゲイン上昇。位相 が遅れる。定常偏差に効果。位相遅れ補償器 と同様の効果 – 微分ゲイン:高周波領域でのゲイン上昇。位 相が進む。速応性に効果。位相進み補償器 と同様の効果� 75 PID動作� PID制御器の伝達関数� Gc (s) = KP 1 1+ + sTD sTI – KP:比例ゲイン – TI:積分時間 – TD:微分時間 76 PID制御の種類� • P動作(比例動作) – ゲイン調整に対応。安定性を改善 • PI動作(比例+積分動作) – 位相遅れ補償に対応。定常特性を改善 • PD動作(比例+微分動作) – 位相進み補償に対応。速応性を改善 • PID動作(比例+積分+微分動作) – 定常特性と速応性を同時に改善� 77 PID制御器のパラメータ調整� • PID制御器 – 調節するパラメータが3つ – 効果がわかりやすい ⇒�実用的 • パラメータの調整も、直感的に調整するこ とで、ある程度の性能が確保 78 ステップ応答法� 複雑な制御対象であっても近似的に次の伝達関数 Gp(s) であると見なし,ステップ応答を測定した結果 から以下の表に従ってパラメータを決定する� Ke s GP (s) = 1 + sT P制御 PI制御 PID制御 Kp� 1 RL 0.9 RL 1.2 RL 1次遅れ要素とむだ時間要素で近似 T I� T D� ー� ー� 3.3L� ー� 2L� 0.5L� c� R= c T t 0 τ =L 79 T 限界感度法� まず P 動作のみ(KI=KD=0)で安定限界となる KP = Ko を定め、このときの持続振動の周期 To を測定した 結果から以下の表に従ってパラメータを決定する� 安定限界のときのステップ応答� P制御 Kp� T I� T D� 0.5KO� ー� ー� PI制御 0.45KO� 0.83TO� ー� PID制御 0.6KO� 0.5TO� 0.125TO� c� 0 t T O� 80
© Copyright 2026 Paperzz