Differentially-Encoded Generalized Spatial Modulation
for Cooperative Massive MIMO Systems
Naoki ISHIKAWA
(
(^_^)
c 2014, Naoki Ishikawa.
Copyright ⃝
概要
本研究では Multiple-Input Multiple-Output (MIMO) による大規模アレイアンテナとノー
ド協調ネットワークの両方式に適した新しい差動時空間ブロック符号を提案する.差動時空間
ブロック符号とは,送信された二つの連続する符号の一つ目を参考に二つ目の送信符号を推定
できる符号である.提案手法は従来手法と比べて高いデータレートを実現しながら非コヒーレ
ント検出を可能とし,コヒーレント検出による手法と比べたときの性能劣化は理論限界値まで
0.5 dB に漸近する.さらに,単一高周波回路の制限下で送信アンテナ数の増加によって単調
に性能を改善できる拡張手法を提案する.この拡張手法は多数のアンテナが同時に使われる環
境 (大規模 MIMO) や,複数のノードが互いに協力し合って仮想的に一つのアレイアンテナと
して振る舞う環境 (協調 MIMO) に特に適している.
コヒーレント検出を用いたシステムでは受信機でチャネルを推定するために通常のデータ送
信に加えてパイロットシンボルを挿入する必要があり,これはシステムのデータレートを低下
させる.特に,大規模 MIMO や協調 MIMO においては,パイロットシンボルの挿入とチャ
ネルの推定処理が信頼性の低下と計算コストの増加を招く.このような環境にチャネル情報を
前提としたコヒーレント検出による手法を適用するのは難しい.提案手法は差動符号化と非コ
ヒーレント検出を用いるためチャネル推定の必要がなく,大規模 MIMO や協調 MIMO にお
いて,チャネル推定に起因する問題を解決できる.また,提案手法はモデルに高い一般性を持
つため,既存の差動時空間ブロック符号の包括表現を可能とする.今後,既存手法を数学的に
解析する場合や,数値シミュレーションによって性能を追試する場合は本研究の提案手法のみ
を対象とすればよい.加えて,提案する拡張手法は,送信アンテナ数 (または協力ノード数)
の増加にともなって三次のオーダーの負担がかかる処理を線形のオーダーに削減し,システム
のさらなる大規模・高性能化に貢献する.
提案手法を数値シミュレーションによって評価し,高い性能を発揮できることを確認する.
具体的には,コヒーレント検出による手法と比べて性能損失が約 3.5 dB になり,理論限界値
の 3.0 dB に漸近する結果となる.チャネルの推定誤差はコヒーレント検出による手法に性能
損失を引き起こす.コヒーレント検出手法のチャネル推定結果に誤差があるとき,提案の非コ
ヒーレント検出手法はより優れた性能を達成できることを数値解析により確認する.最後に,
拡張手法のスケーラビリティを信頼性の側面から数値解析により明らかにする.
ii
記号一覧
本論文では実数変数と複素変数を細字の斜体で記述する (e.g. x, M ).また,太字の正体で
ベクトルまたは行列を表す (e.g. x, A).以下の記号や関数を断りなく使う.
j
e
π
⌊·⌋
(·)
·
exp(·)
log(·)
Re[·]
Im[·]
E[·]
Var[·]
Im
⊗
(·)T
(·)∗
(·)H
∥ · ∥F
tr(·)
det(·)
rank(·)
diag(·)
vec(·)
Z
R
C
m×n
A
N (µ, σ 2 )
CN (µ, σ 2 )
虚数
使用例:
自然対数の底 (ネイピア数)
円周率
ejπ + 1 = 0
床関数
二項係数
指数関数
対数関数
実部
虚部
期待値
分散
大きさ m の単位行列
A ∈ Ck×l , B ∈ Cl×m (k, l, m は正の整数) とする.
√
このとき,∥A∥F = tr(AAH )
vec(AB) = (Im ⊗ A)vec(B)
A = AT のとき A は対称行列
AT = A−1 のとき A は直交行列
A = AH のとき A はエルミート行列,
jA は (jA)H = −jA なので歪エルミート行列
AH = A−1 のとき A はユニタリ行列
クロネッカー積
転置
互いに独立な確率変数 x, y がそれぞれ正規分布
複素共役
N (0, 1/2), N (0, 1/2) に従うとき,z = x + jy は
標準複素正規分布 CN (0, 1) に従う.
ここで,多変量の正規分布を平均ベクトル µ,
分散共分散行列 Σ によって N (µ, Σ) と表すとき,
[
]
([
]
)
エルミート転置
フロベニウスノルム
トレース
行列式
Re[z]
Im[z]
階数
対角行列
列ベクトル化
整数環
実数体
複素数体
(aij ) ∈ A によって構成される
大きさ m × n の行列の集合
平均 µ,分散 σ 2 の正規分布
平均 µ,分散 σ 2 の複素正規分布
となる.
∼N
0
0
, 12 I2
iii
目次
概要
i
記号一覧
ii
第1章
序論
1
1.1
本研究の背景 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
1.2
本研究の目的 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
1.3
本研究の貢献 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
1.4
本稿の構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
時空間ブロック符号
5
2.1
システムモデル
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
2.2
符号化 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
第2章
2.2.1
OSTBC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
2.2.2
SM / SSK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
2.2.3
SDM
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
2.2.4
GSTSK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
2.3
時空間ブロック符号の評価基準 . . . . . . . . . . . . . . . . . . . . . . . .
13
2.4
硬判定による復号
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
15
2.5
性能上限 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16
2.5.1
信頼性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16
2.5.2
チャネル容量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
19
第3章
差動時空間ブロック符号
22
3.1
システムモデル
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
3.2
符号化 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
3.3
3.2.1
DOSTBC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
3.2.2
DLDC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
3.2.3
DSTSK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
25
硬判定による復号
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
26
目次
iv
3.4
性能上限 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
27
信頼性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
27
3.4.1
第4章
提案手法:Non-Coherent GSM
29
4.1
システムモデル . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
30
4.2
符号化 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
30
4.3
硬判定による復号
32
4.4
Non-Coherent GSM のユニバーサル性
4.5
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . .
34
. . . . . . . . . . . . . . . . . . . . . .
34
. . . . . . . . . . . . . . . . . . . . . . . . .
35
4.4.1
DSTSK / DLDC との関係
4.4.2
演算量のトレードオフ
Single-RF Non-Coherent GSM
. . . . . . . . . . . . . . . . . . . . . . .
36
4.5.1
大規模 MIMO への適用 . . . . . . . . . . . . . . . . . . . . . . . . .
36
4.5.2
協調 MIMO への適用 . . . . . . . . . . . . . . . . . . . . . . . . . .
38
4.6
分散行列の探索アルゴリズムとその実装
4.7
シミュレーション結果と考察
第5章
. . . . . . . . . . . . . . . . . . .
39
. . . . . . . . . . . . . . . . . . . . . . . . .
42
結論
45
5.1
まとめ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
45
5.2
今後の課題 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
5.2.1
チャネル容量の導出 . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
5.2.2
分散行列の解析的生成 . . . . . . . . . . . . . . . . . . . . . . . . . .
46
5.2.3
高レートにおける性能劣化の改善 . . . . . . . . . . . . . . . . . . . .
47
5.2.4
単一 RF 制約による性能劣化の改善
. . . . . . . . . . . . . . . . . .
48
5.2.5
さらなる送信アンテナ数の増加への対応 . . . . . . . . . . . . . . . .
48
参考文献
50
謝辞
55
投稿論文一覧
56
用語集
58
付録 A
分散行列
62
A.1
GSTSK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
62
A.2
Non-Coherent GSM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
66
A.3
Single-RF Non-Coherent GSM . . . . . . . . . . . . . . . . . . . . . . . .
68
1
第1章
序論
21 世紀初頭から携帯電話市場は爆発的に大きくなり続けている.2012 年時点でインター
ネットに接続可能なタブレットは 36 億台,ノート PC は 161 億台に達し,2013 年末までに
インターネットに接続可能な携帯端末数は世界の総人口を越える [1].また,2013 年 12 月現
在は 1 台のスマートフォンが 1 ヶ月間で平均 342MB のデータ通信を行い,自宅に電気・水
道・ガスといったインフラ設備がない人ですら携帯電話を持つ時代になった [1].移動体通信
全盛の時代である.セルラネットワークは私たちの生活の中でも特に重要なライフラインの一
つだ.
セルラネットワークをはじめとする無線通信ネットワークは電波帯域を専有する.利用可能
な電波帯域は限られているため重要な資源といえる.日本における地上アナログ放送は 2012
年 3 月に完全停波したが,この停波にともなって VHF 帯 *1 と UHF 帯 *2 の一部に空きが生
じ,715 – 725MHz は ITS*3 に新たに割り当てられた [2].VICS*4 や ETC
*5
に代表される
ITS は既に私たちの生活に浸透し,これらなしの生活は考えられない.今後は新たに割り当て
られた帯域において,車車間通信などの無線通信ネットワークの実現が予定されている.2013
年 10 月に開催された第 20 回 ITS 世界会議では先進的な運転支援システムが多数披露された
[3].自動車メーカー各社は路車間通信・車車間通信の技術をこれまで以上に発展させ,交通事
故による死傷者数のさらなる削減を目指している.こういった技術は自動運転車の実現には必
要不可欠であり,地上アナログ放送のために使われていた電波帯域の一部が ITS の機能充実
のために割り当てられた意義は大きい.車車間通信などの先進運転支援システムもゆくゆくは
私たちの命を守るために欠かせない重要なライフラインになるだろう.情報通信分野の技術革
新は人々の移動通信を支えるセルラネットワークや,自動運転車を実現する車車間通信の発展
に貢献する.同分野が私たちの生活に与える影響は大きい一方で,発展を妨げる技術的な課題
は山積している.
*1
*2
*3
*4
*5
Very High Frequency, 超短波.30 – 300MHz の周波数を持つ電波.
Ultra High Frequency,極超短波.300MHz – 3GHz の周波数を持つ電波.
Intelligent Transport Systems,高度道路交通システム.
Vehicle Information and Communication System,道路交通情報通信システム.
Electronic Toll Collection system,電子料金収受システム.
第1章
2
序論
例として,無線通信における大きな課題の一つにフェージングが挙げられる.送信機と受信
機の間の電波状況は時々刻々と変化する.反射や回折など様々な物理的外乱によって電波伝搬
特性は大きく変化し,このような現象をフェージングと呼ぶ.特に,送信機/受信機が高速で
移動している環境でフェージングは激しくなる.また,通信の品質向上にともないエネルギー
消費が大きくなるという課題もあり,省エネかつ高品質な通信を実現する手法が研究されてい
る [4].大規模災害発生時は無線通信ネットワークが被災地域の命綱として活躍する.データ
の送受信によって消費する電力が大きいと,限られた電源で動作する携帯端末や基地局の稼働
可能時間が短くなってしまう.
これらの課題を解決し,高品質で省エネルギーな無線通信を実現する技術として,大規模
MIMO [5, 6] と協調 MIMO [7, 8] がある.MIMO とは複数のアンテナを使って無線通信の品
質を高める技術の総称である.
1.1 本研究の背景
1948 年,Shannon は AWGN*6 チャネルにおける Single-Input Single-Output (SISO) 通
信のチャネル容量を,Bw を帯域幅,γ を信号対雑音比 (S/N 比) として次式で表した [9].
C = Bw log2 (1 + γ) [b/symbol]
つまり,チャネル容量は帯域幅に対して線形に,S/N 比に対して対数的に増える.この式は極
限的な性能を発揮できる誤り訂正符号 *7 の存在を前提に導出された.そのような誤り訂正技
術を適用したあとは帯域幅の拡充か受信 S/N 比の改善でしかチャネル容量を増やせないこと
を意味する.電波帯域は限られた資源なので,SISO 通信のデータレートを増やすためには受
信 S/N 比を改善するしかない
*8 .一方,Foschini
[13, 14] や Telatar [15] らによる先駆的研
究は,追加の帯域幅を全く必要とせずにアンテナ数の増加とともにチャネル容量が線形に増え
ることを示し,MIMO の潜在的な可能性を明らかにした.
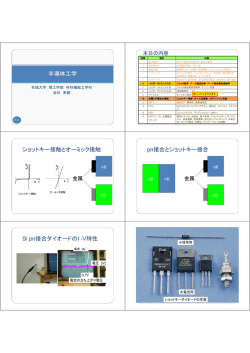
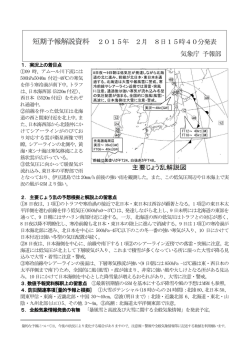
MIMO の技術は主に「空間多重化」
「ダイバーシティ」
「ビームフォーミング」の三つに分け
られる (図 1.1) [16].MIMO では複数の情報ストリームを利用可能だ.このとき,すべての
ストリームに異なるシンボルを流すことによって,送信データを多重化することができる (空
間多重化).また,複数のストリームに同じシンボルを流せば,そのぶん受信機でのシンボル
推定の誤り率が低下する (ダイバーシティ).さらに,送信アンテナと受信アンテナ間の電波伝
搬状況(チャネル情報)を推定し,各アンテナから送信する信号の振幅と位相を制御すること
によって狙った方向への指向性を持たせ,特定受信機の受信 S/N 比を改善することができる
(ビームフォーミング).この指向性によって各受信機における電波干渉が軽減されるので,よ
*6
*7
*8
Additive White Gaussian Noise,加法性白色ガウス雑音.周波数領域で電力スペクトル密度が一様(白色)
かつ時間領域で正規分布に従う(ガウス性)雑音のこと.
ターボ符号 [10] や低密度パリティ検査符号 [11, 12] がシャノン限界に漸近することが知られている.
超広帯域 (Ultra Wide Band) 通信のように例外がある.超広帯域通信は周囲に干渉しない微弱電波を広い帯
域に拡散させて通信を行い,帯域幅を広げることによってチャネル容量を改善する.
1.1 本研究の背景
3
り多くのユーザとの同時通信も実現し (Multi-User MIMO [17]),周波数帯域の利用効率が高
まる.
1
s1
Tx s2
(a) 空間多重化
Rx
Tx
2
Rx
Rx
(b) 送信ダイバーシティ
Tx
(c) ビームフォーミング
図 1.1. MIMO の主な機能 [16]
Spatial Modulation (SM, 空間変調) [18] や Space Shift Keying (SSK, 空間偏移変調) [19]
に代表される MIMO のための符号化手法は,送信機/受信機の両方で実現できる単純な構造に
よって近年大きな関心を集めている [16, 20].これらの手法では,複数の送信アンテナのうち
1 本だけを有効にすることによって,そのアンテナ選択自体に情報を割り当てデータレートを
向上させる.SM の送信機は Radio Frequency (RF, 高周波) 回路をただ一つだけ含むため,
データレートを増やすために多くのアンテナが使われる大規模 MIMO において有効である.
チャネル推定結果に依存した復号処理 *9 を行う符号化手法の評価において,チャネル情報
が何の犠牲もなしに得られるというのは楽観的な前提条件である.本来,チャネルを推定する
ためには通常のデータ送信に加えてパイロット信号を挿入する必要があり,これはシステムの
性能に悪影響を与える.特に,多数のアンテナが用いられる大規模 MIMO のような環境では
チャネル数が増えるので,チャネル情報の推定は困難な課題となる.また,パイロット信号の
挿入と推定によって得たチャネル情報には推定誤差があり,この推定誤差により性能損失が生
じうる.この性能損失は特に大規模 MIMO においては無視できない.
これらの課題を解決するために,Space-Time Shift Keying (STSK, 時空間偏位変調) を差
動符号化した非コヒーレント検出による手法が提案された [21].単一 RF と複数 RF による
データ送信手法も [21] 中で提案されている.SM よりもさらにデータレートを向上させるた
めに,複数の異なるアンテナから同時にシンボルを送信するコヒーレント検出による手法も既
に提案されている [22, 23].これらの手法は Generalized Space Shift Keying (GSSK, 一般空
間偏位変調) / Generalized Space-Time Shift Keying (GSTSK, 一般時空間偏位変調) と呼ば
れる.GSSK と GSTSK は複数の RF ブランチを使うことによって,SM より高いデータレー
トを実現する.
GSTSK は SM や GSSK など,主要なコヒーレント検出による符号化手法を包括する
MIMO のフレームワークである.前述のとおり,STSK に対応する差動符号化手法は既に提
案されているが,GSTSK に対応する差動符号化手法はこれまでに提案されていない.
*9
コヒーレント検出,同期検波などと呼ばれる
4
第1章
序論
1.2 本研究の目的
以上の背景を踏まえて,本研究ではチャネル推定の必要ない一般化された差動符号化手法
を提案する.この手法では五つのパラメータを導入し,システムを柔軟に表現できるように
する.これによって,様々なトレードオフを容易に確認できるようになる.加えて,大規模
MIMO や協調 MIMO など将来の通信システムにおいて重要となるスケーラブルな拡張手法
を提案する.
1.3 本研究の貢献
本研究の主な貢献は次のとおりである.
• 既存の差動符号化手法を包括可能な新しい差動時空間ブロック符号を提案する.
• その手法を単一の RF 回路のみで通信可能なように拡張する.これにより,大規模
MIMO 方式や協調 MIMO 方式に適用可能とする.
• 数値シミュレーションによって提案手法が高い性能を発揮できることを確認する.
1.4 本稿の構成
本稿は 2 章, 3 章で提案手法の背景となる手法について詳しく説明する.そのあと 4 章で提
案手法の詳細を延べ,5 章で本稿を結論付ける.
第 2 章 MIMO のための時空間ブロック符号について説明する.チャネル推定がシステムに
あたえる影響はないものと仮定して,主な手法をシミュレーションによって評価する.また,
解析的な性能評価もあわせて実施する.
第 3 章 MIMO のための差動時空間ブロック符号について説明する.チャネル情報が未知で
も受信符号の推定が可能な点を強調し,主な手法をシミュレーションによって評価する.ま
た,2 章のコヒーレント検出による手法との性能比較を行う.
第 4 章 提案手法である Non-Coherent Generalized Spatial Modulation (GSM, 一般空間変
調) について説明する.送信機における符号化,受信機における復号について説明したあと,
他の手法との関係について述べる.次に,RF 回路を一つしか備えていない送信機に応用可能
な拡張手法について説明し,これが大規模 MIMO と協調 MIMO の両方式に適している理由
を説明する.最後に,提案手法をシミュレーションによって評価し,2 章, 3 章で紹介した手法
と性能を比較する.
第 5 章 本稿をまとめ,提案手法の今後の課題について述べる.
5
第2章
時空間ブロック符号
高品質な無線通信を実現する MIMO アーキテクチャとして時空間符号 (Space-Time Code,
STC) があり,時空間符号は特に時空間ブロック符号 (Space-Time Block Code, STBC)
[24, 25] と時空間トレリス符号 (Space-Time Trellis Code, STTC) [26] の二つに分類できる.
本章では時空間ブロック符号について説明する.時空間ブロック符号は時間方向と空間方向に
一定の長さをもつブロック符号であり,このブロック符号へのシンボルの埋め込み方によって
空間ダイバーシティによる信頼性の向上や,多重化利得によるデータレートの向上など,達成
可能な性能が変化する [27].
これまでに様々な時空間ブロック符号が提案されてきた.本章ではまず,時空間ブロック符
号の送受信を表現する数式モデルについて説明する.次に,これまで提案されてきた手法のう
ち代表的なものを紹介する.最後に,それぞれの手法の性能について考察する.
2.1 システムモデル
本研究で前提とするシステムモデルについて説明する.無線通信における主な課題として,
多重散乱波によって引き起こされるフェージングが挙げられる.送信機と受信機は大気を伝送
媒体として通信を行うが,様々な物理的外乱によって伝送路の状況は時々刻々と変化する.こ
のような現象をフェージングと呼び,これによって送信信号は振幅と位相がずれた状態で受信
される.本研究で前提とするモデルにおいてチャネルは狭帯域のレイリーフラットフェージン
グを仮定する.広帯域モデルの周波数選択性フェージングについては考えない.
一つの時空間ブロック符号はシンボル時間 Ts 秒ごとに T 回に分けて送信する.送信機には
M 本のアンテナがあり,受信機には N 本のアンテナがあるものとする.このシステムモデル
を図 2.1 に示す.
ここで,i (i ≥ 1) を送信インデックス,Y(i) ∈ CN ×T を受信機で受信した信号,H(i) ∈
CN ×M をフェージングの影響を表すチャネル係数,S(i) ∈ CM ×T を送信する時空間ブロック
符号,V(i) ∈ CN ×T を加法性雑音として,信号の受信ブロックを式 (2.1) のように表現する.
Y(i) = H(i)S(i) + V(i)
(2.1)
第2章
6
時空間ブロック符号
1
h11
1
2
2
M
N
Tx
Rx
hNM
図 2.1. 送信アンテナ数 M 本の送信機 (Tx) と受信アンテナ数 N 本の受信機 (Rx).アンテナ
間のチャネルは hnm ∈ C (1 ≤ m ≤ M, 1 ≤ n ≤ M ) で表す.
式 (2.1) のそれぞれの行列中の要素は次の変数で表現する.
···
..
.
···
y11
..
.
yN 1
y1T
h11
.. = ..
. .
hN 1
yN T
CN ×T
···
..
.
···
h1M
s11
.. ..
. .
hN M
sM 1
CN ×M
···
..
.
···
s1T
v11
.. + ..
. .
sM T
vN 1
CM ×T
· · · v1T
..
..
.
.
· · · vN T
CN ×T
ここで,変数 m, n, t ∈ Z (1 ≤ m ≤ M, 1 ≤ n ≤ N, 1 ≤ t ≤ T ) を導入する.これらの変数
は以降本章では断りなく使う.
時空間符号 S(i) の 1 列を送信する時間間隔 (シンボル時間) は Ts なので,ynt は時刻
(t − 1)Ts [s] と tTs [s] の間に受信アンテナ n が受信した信号を表す.
チャネル行列 H(i) について説明する.hnm は送信アンテナ m から受信アンテナ n への経
路のチャネル情報を表す.複素数である hnm が送信シンボルに掛け合わせられることによっ
て振幅と位相にずれが生じる.チャネルは無相関のレイリーフェージングを仮定しているの
で,hnm はレイリー分布 CN (0, 1) に従う.またチャネルは無相関なので hnm は i.i.d.*1 にな
る.レイリーフェージングは LOS (Line Of Sight, 見通し内経路) がない状態での電波伝搬を
表している.フェージングの中でも特に厳しいものに分類できるが,時空間ブロック符号の性
能を評価するときに一般的に使われる [22–26, 28].
本章ではコヒーレント検出を対象とするため,受信機においてチャネル行列 H(i) は既知で
あると仮定する.このチャネル行列を推定するためには通常のデータ信号の送信に加えてパイ
ロット信号を挿入する必要がある.これによって通信のデータレートが低下するが,本章では
このチャネル行列 H(i) はいかなる損失も伴わずに正確な値が取得できていると仮定する.一
方,3 章では H(i) が未知であっても通信可能な手法について説明する.
S(i) は M 本のアンテナを備えた送信機から T Ts [s] の間に送信される時空間ブロック符号
を表す.smt は時刻 (t − 1)Ts [s] と tTs [s] の間に送信アンテナ m から送信される複素シンボル
である.
V(i) は受信機内で発生する熱雑音などの内部雑音を表す.この雑音は AWGN とし,分散
*1
independent and identically distributed,独立同一分布.確率変数が独立かつ,同一の確率分布に従うこ
と.
2.2 符号化
7
を N0 とする.つまり vnt は CN (0, N0 ) に従う.このとき,vec(V(i)) の共分散行列の平均
は N0 IN T に収束する.すなわち,V(i) 中のすべての正規乱数には互いに相関がない.なお
AWGN の分散 N0 は受信 S/N 比を γ とおいて式 (2.2) で定義する.
[
]
E ∥S(i)∥2F
N0 =
M ·T ·γ
(2.2)
[
]
実際のシミュレーションでは,簡単のため送信符号のエネルギーを E ∥S(i)∥2F = M T とな
るように固定した.
2.2 符号化
MIMO の主な時空間ブロック符号の作り方について説明する.変調方式として Phase-Shift
Keying (PSK, 位相偏移変調) / Quadrature Amplitude Modulation (QAM, 直角位相振幅
変調) を利用し,それらの信号点数を L とおく.
2.2.1 OSTBC
Orthogonal Space-Time Block Code (OSTBC, 直交時空間ブロック符号) はフルダイバー
シティ *2 を実現できる符号化手法である.また,受信機での送信シンボル推定の演算量が非
常に小さいという特性もある.送信アンテナ数 M = 2 の場合の Alamouti 法 [24] が有名であ
り,この手法を任意の M で一般化した符号化方式が OSTBC と呼ばれる.M = 2 の場合の
送信符号の一例を次に示す.
1
S(i) = √
2
[
s1
s2
−s∗2
s∗1
]
(2.3)
式 (2.3) のような送信符号のとき,各シンボルは図 2.2 のように送信する.
-s2*
Tx s1*
s1
s2
Rx
図 2.2. Alamouti 法の送信機 (M = 2).シンボル s1 , s2 を 2 本のアンテナそれぞれから Ts 秒
かけて送信し,次にシンボル −s∗2 , s∗1 を同様に送信する.
もともとの Alamouti 法では,s1 , s2 は PSK シンボルである必要があるが,Tarokh らはこ
の制限を取り除き QAM シンボルなどを埋め込めるように改良した [25].
受信機での復号処理は他の手法と異なるため,特別にここで説明する.以下の手法は,
Alamouti が [24] の中で「The scheme may easily be generalized to two transmit antennas
and N receive antennas to provide a diversity order of 2N .」と述べるに留まり,詳しくは
*2
ダイバーシティオーダーが min(M, T ) · N となること
8
第2章
時空間ブロック符号
説明していない復号方法を著者が数式化したものである.送信アンテナ数 M = 2 を前提と
し,任意の受信アンテナ数 N に対応可能なシンボルの推定方法について説明する.まず,次
の 2 × 2 複素行列を返す関数 ψ を定義する.
[
ψ(h11 , h21 ) =
h11
h∗21
h21
−h∗11
]
¯ = vec(H) ∈ CN M ×1 の i 行目の要素を H
¯ i と表記する.そして,Heq を式 (2.4) の
また,H
ように定義する.
Heq =
[
¯ 1, H
¯ 2)
ψ(H
¯ 3, H
¯ 4) · · ·
ψ(H
¯ N M −1 , H
¯ NM )
ψ(H
]T
∈ CN M ×2
(2.4)
例えば,N = 2, 3 のときの Heq は次のとおりである.
Heq
[
h11
h∗
= [ 21
h11
h∗21
h21
−h∗11
h12
h∗22
h22
−h∗12
h21
−h∗11
h31
h∗12
h12
−h∗31
]T
(N = 2)
h22
h∗32
h32
−h∗22
]T
(N = 3)
最後に,受信シンボル ˆ
s は式 (2.5) のように推定する.
ˆs = vec(Y)H Heq ∈ C1×2
(2.5)
のちに述べる最尤推定による手法は OSTBC にも適用可能だが,式 (2.5) と比べて探索空間
は非常に大きい.OSTBC では最大のダイバーシティ利得を達成できるものの,空間多重化利
得は得られない.Alamouti 法のデータレートは RAlamouti = log2 L [b/symbol] となる.送信
アンテナ数 M ≥ 3 の場合にデータレートに損失が生じる.
2.2.2 SM / SSK
SM / SSK は送信ダイバーシティを利用せず受信ダイバーシティのみを利用する [18,
19, 28, 29].この手法は送信アンテナ数 M 本のうち 1 本のみからシンボルを送信し,そ
のアンテナ選択自体に情報を割り当てる.これによって,チャネル間干渉 (Inter-Channel
Interference, ICI) を避けながらデータレートの向上を実現した.SM のデータレートは
RSM = log2 M L = log2 M + log2 L であり,送信アンテナ数 M の増加に対して対数的にデー
タレートが増加する.一方で,この手法には送信ダイバーシティ利得がないので信頼性は高め
られない.
SM の送信符号 Sm,l ∈ CM ×1 (1 ≤ l ≤ L) を式 (2.6) に示す.
Sm,l = [0 · · · 0 sl 0 · · · 0]T
m−1
(2.6)
M −m
ここで,sl は PSK/QAM シンボルで,入力されたビット列のうち log2 L ビット分に対応し
て割り当てられる.また,選択したアンテナ番号を表す整数 m は log2 M ビット分に対応して
2.2 符号化
信号選択
s s
入力ビット列
b = [ 0 01 ]
2
1
1
0
BPSK
9
00
01
s1
10
modulation
11
アンテナ選択
図 2.3. SM の送信機の内部構造の一例.送信アンテナ数 M = 4 本で BPSK 変調を使う.信号
選択に 1 ビット,アンテナ選択に 2 ビットが割り当てられる.
割り当てられる.例えば,送信アンテナ数 M = 4 本で Binary PSK (BPSK) 変調を使う場合
の SM を用いた送信機の内部構造を図 2.3 に示す.
図 2.3 において,3 ビットのビット列が入力されたとき,先頭の log2 2 = 1 ビットが BPSK
変調に割り当てられ,シンボル sl が用意される.次に,残りの log2 4 = 2 ビットがアンテナ
選択に割り当てられ,対応する送信アンテナ m が選ばれる.最後に,送信アンテナ m からシ
ンボル sl が送信される.この場合のデータレートは,信号選択とアンテナ選択に割り当てる
ビット数を足し合わせて 3 [b/symbol] となる.このシステム設定におけるビット列と選択シ
ンボル・選択アンテナ番号の対応表を表 2.1 に示す.
表 2.1. 送信アンテナ数 M = 4 本で BPSK 変調を使う場合の SM のビット列と (m, l) の対
応表
情報源
選択するアンテナ番号
選択シンボル
(3 ビット)
m
sl
00
0
1
+1
00
1
1
−1
01
0
2
+1
01
1
2
−1
10
0
3
+1
10
1
3
−1
11
0
4
+1
11
1
4
−1
2.2.3 SDM
OSTBC はフルダイバーシティを達成可能だがデータレートは低い.一方,Space Division
Multiplexing (SDM, 空間分割多重) はダイバーシティ利得を犠牲にしてデータレートを最
大限高めようとする手法である [13].具体的には,送信機は M ストリームすべてに M 個
の独立したシンボルを流し込む.これによって,ダイバーシティオーダーは N にまで下
第 2 章 時空間ブロック符号
10
がってしまうが,OSTBC のデータレート RAlamouti = log2 L と比べて高いデータレート
RSDM = M log2 L を達成した.
一般的に,送信データレートが高くなるほど受信機における復号処理は指数関数的に複雑に
なる *3 .Wolniansky らによる Vertical Bell Laboratories Layered Space-Time (V-BLAST)
はシンボル干渉キャンセラ (Symbol Interference Canceller, SIC) によって受信機におけるシ
ンボル推定のオーダーを線形に落とし込んだ [30].この手法では受信機において,まず受信し
た M 個のシンボルの受信 S/N 比を測定する.そして,もっとも受信 S/N 比の高いシンボル
を,他のシンボルを雑音とみなして推定し,推定したシンボルを全体から差し引く.次に二番
目に受信 S/N 比の高いシンボルを同様に推定し,また全体から差し引く.このような工夫に
よって,空間多重化利得を最大限大きくするために生じたチャネル間干渉の影響を軽減するこ
とに成功した.
ちなみに,フルダイバーシティとフルレートは両立せずトレードオフの関係になることが
証明されている.このトレードオフは Diversity and Multiplexing Tradeoff (DMT) と呼ば
れる [27].DMT の一例を図 2.4 に示す.この図はフルダイバーシティを達成するとデータ
レートが下がり,フルレートを達成するとダイバーシティオーダーが小さくなる様子を表して
いる.
(0,4)
(1,1)
(2,0)
空間多重化利得
図 2.4. ダイバーシティ利得と空間多重化利得のトレードオフ
2.2.4 GSTSK
これまで説明した OSTBC/SM/SSK/SDM はすべて独立した手法として提案され,シミュ
レーションや解析,ハードウェア実装などは個別に行われてきた.これらの手法を単一の
手法によって表現し,手法の評価や解析にかかる負担を軽減するための手法として GSTSK
が提案された [23].GSTSK は既存の MIMO のための主な符号化方式を包括して扱えるよ
うにするためのフレームワークである.このフレームワークでは送信機のシステム設定を
(M, N, T, Q, P ) というパラメータと分散行列 (Dispersion Matrix, DM) の集合で表す.パラ
メータを限定し分散行列を設定した場合の送信機の内部構造が既存手法と同じになる.パラ
メータを限定せず分散行列も任意の場合に対して数学的な解析を行うことによって,一般化し
た場合の結果が得られる.これによって,既存手法を包括的に評価できるようになった.ま
*3
一つの符号に含まれる情報量 B を B = RT とするとき送信符号は 2B 種類ある.
2.2 符号化
11
た,それぞれの手法を分散行列の探索空間の特異点として扱い,後述する符号を評価するため
の手法と組み合わせて分散行列を数値探索によって求め,より高い性能を達成できるように
なった.GSTSK と他の手法との関係を図 2.5 に示す.
GSTSK (M,N,T,Q,P)
P Q
P 1
STSK
LDC
T 1
T 1
SM/SSK OSTBC
T 1
BLAST
図 2.5. GSTSK の他の手法との関係 [23]
B1
Source
B
S/P
Dispersion- A(1)(i)
matrix
activation
A1
AQ (P)
A (i)
PSK/QAM
PSK/QAM
B2
1
S(i)
Space-time
mapper M
s(1) (i)
s(P) (i)
図 2.6. GSTSK の送信機の内部構造 [23]
GSTSK の符号化手法について説明する.送信機の内部構造を図 2.6 に示す.GSTSK
では,送信符号を作るために分散行列を利用する.分散行列は,適切なものを人の手で作
る場合と数値探索によって求める場合の二つがある.いずれの場合でも,分散行列は符
号化に前もって用意する必要がある.Q 個の分散行列を用意するものとし,分散行列は
Aq ∈ CN ×M (1 ≤ q ≤ Q) と表記する.この分散行列は式 (2.7) のエネルギー制約を満たすも
のとする.この制約式を満たさずに生成された符号は送信エネルギーがずれてしまうので,他
の手法と比較するときにはそのずれを考慮する必要がある.
[
] T
tr Aq AH
(1 ≤ q ≤ Q)
=
q
P
(2.7)
SM ではアンテナの選択に情報を割り当てるが,GSTSK では Q 個の分散行列から P 個を
選ぶことによって情報を割り当てる.選んだ P 個の分散行列を A(p) (i) (1 ≤ p ≤ P ) と表記
する.次に,P 個のシンボル s(p) (i) ∈ C (1 ≤ p ≤ P ) を選択し,それぞれを先ほど選んだ
A(p) (i) にかけて足し合わせたものを送信符号とする.シンボルは L–PSK や L–QAM などの
変調方式に対応している.送信符号 S(i) は式 (2.8) のように生成する.
S(i) =
P
∑
p=1
s(p) (i)A(p) (i)
(2.8)
12
第 2 章 時空間ブロック符号
ここで,この符号に埋め込まれた情報量について考える.分散行列の選択方法は
⌊log2 (Q
P )⌋
あり,これを 2 の累乗に切り下げた数,すなわち,2
(Q)
P
通り
通りがビットの割り当てに使え
る.次に,信号点数 L のシンボルを P 個選んでいるので,シンボルの選択には P log2 L ビッ
トを割り当てられる.ここで,B1 = ⌊log2
(Q)
P ⌋, B2 = P log2 L とおいて,B = B1 + B2 とす
る.GSTSK のデータレートは B/T として式 (2.9) で与えられる.
RGSTSK =
B
=
T
⌊
( )⌋
log2 Q
+ P log2 L
P
T
[b/symbol]
(2.9)
分散行列の作り方について説明する.分散行列は,最終的に生成するブロック符号 S(i) の
Pairwise-Error Probability (PEP, 送信符号が誤って違う符号として推定される確率) の最小
化や,後述する DCMC 容量の最大化を目標に最適化される.本研究では PEP の最小化を目
指し,Rank- and Determinant- Criterion (RDC) を採用した.この基準について詳しくは
2.3 節で後述する.
表 2.2. GSTSK(M, N, T, 3, 2), BPSK の場合の符号化の具体例.一つの符号あたりに B =
B1 + B2 = 1 + 2 = 3 ビットを割り当てている.
情報源
(3 ビット)
選択する DM
(1)
A
(2)
(i), A
(i)
BPSK シンボル
(1)
s
(i), s
(2)
(i)
送信符号
S(i)
0
00
A1 , A2
+1, +1
A1 + A2
0
01
A1 , A2
+1, −1
A1 − A2
0
10
A1 , A2
−1, +1
−A1 + A2
0
11
A1 , A2
−1, −1
−A1 − A2
1
00
A1 , A3
+1, +1
A1 + A3
1
01
A1 , A3
+1, −1
A1 − A3
1
10
A1 , A3
−1, +1
−A1 + A3
1
11
A1 , A3
−1, −1
−A1 − A3
符号化の具体例を表 2.2 を使って説明する.ここでは,GSTSK(M, N, T, 3, 2), BPSK の
場合について考える.表 2.2 を見て分かるとおり,B = 3 ビットの情報源が S/P 変換され,
B1 = 1 ビットと B2 = 2 ビットに分けられる.B1 ビットに対応して,Q = 3 個の分散行列か
ら P = 2 個が選ばれる.ここで,選ばれた P = 2 個の分散行列を A(1) (i), A(2) (i) と表記す
る.また,B2 ビットに対応して,P = 2 個の BPSK シンボル s(1) (i), s(2) (i) が選ばれる.最
後に,送信符号 S(i) は S(i) = s(1) (i)A(1) (i) + s(2) (i)A(2) (i) のように生成される.
他の手法を取り込むためのパラメータ設定と分散行列の作り方について,ここでは OSTBC,
SM/SSK, BLAST の三つについて説明する.
2.3 時空間ブロック符号の評価基準
13
OSTBC OSTBC は GSTSK を使って表現できる.例えば M = 2 の場合は GSTSK(2, N, 2, 2, 2)
として次のように分散行列を組み合わせて送信符号を表現する.
[
]
[
]
exp (0.25πj)
0.0
0.0
exp (−0.25πj)
A1 =
, A2 =
.
0.0
exp (−0.25πj)
exp (0.25πj)
0.0
] ∑
[
2
1
s1 −s∗2
√
S(i) =
=
(Re[sq ]Re[Aq ] + jIm[sq ]Im[Aq ])
∗
2 s2 s1
q=1
SM/SSK SM は GSTSK(M, N, 1, M, 1) として表現できる.次のように分散行列 Aq ∈
CM ×1 (1 ≤ q ≤ Q) を用意する.
A1 =
1
0
..
.
, A2 =
0
0
1
..
.
, ..., AQ =
0
0
0
..
.
(2.10)
1
ここで,分散行列の選択がそのまま送信アンテナの選択に結びついている点に注目して欲し
い.具体的に,m 番目のアンテナからシンボル sl を送信するときの分散行列の組み合わせは
次のようになる.
Sm,l (i) = [0 · · · 0 sl 0 · 0]T
m−1
M −m
= 0 · A1 + · · · + 0 · Am−1
+ sl · Am
+ 0 · Am+1 + · · · + 0 · AQ
BLAST BLAST は GSTSK(M, N, 1, M, M ) として表現できる.分散行列は式 (2.10) と全
く同じものを使う.この場合,SM と同様に送信ダイバーシティは得られないが,空間多重化
利得は最大になる.SM は単一 RF 回路でのシンボル送信を実現し,受信機での最尤検出器を
単純にできるという利点がある一方で,BLAST は送信アンテナ数 M と同じ数のシンボルを
同時に並列して送信しているので,チャネル間干渉を取り除くための計算コストが大きいとい
う欠点がある.これの解決策のひとつを 2.2.3 項で解説した.
このように,GSTSK によって色々な MIMO の手法を表現できることが分かった.以降は
GSTSK に限定してコヒーレント検出による MIMO の符号化方式について説明する.
2.3 時空間ブロック符号の評価基準
Rank- and Determinant- criterion [31] は時空間ブロック符号を評価するための基準の一
つである.高 S/N 比における PEP の上界を表していて,これを最小化することによって時空
間ブロック符号の性能を改善することができる.式 (2.1) のシステムモデルにおいて,とある
符号 S が誤って違う符号 S′ として判定されてしまう確率の上界は,R = (S − S′ )(S − S′ )H
第 2 章 時空間ブロック符号
14
とおいたとき,式 (2.11) で与えられる [32].
P(S → S′ ) ≤
1
IM N +
1
4N0 R
(2.11)
⊗ IN
ここで m′ = ∥rank(R)∥ とおき,µm で R の m 番目の固有値を表すものとする.固有値が 0
になる場合は便宜上 µm = 1 とする.式 (2.11) は S/N 比が高い領域において次のように簡単
化できる [33].
ダイバーシティ利得
(
1
′
P(S → S ) ≤ ∏min(M,T )
m=1
µN
m
1
4N0
)− m′ N
(2.12)
符号化利得
行列式 d =
∏min(M,T )
m=1
′
µN
m とおく.d は符号化利得を表し,m N はダイバーシティ利得を表
す.符号の設計においては d と m′ の最大化を目標にする.
ここで,符号化利得とダイバーシティ利得の関係を確認してみよう.データレート 2.0, 4.0
[b/symbol] の GSTSK それぞれを対象に,最低 3600 セット以上の分散行列をランダムに生成
し,最小の d(行列式) と最小の m′ (階数) の関係を調べた結果を図 2.7 に示す.この図より,d
と m′ はほぼ一対一に対応していることが分かる.
2.0
4.0E-03
GSTSK(2,1,2,2,1), BPSK, 7187DMs
GSTSK(2,1,2,16,1), 16-PSK, 3600DMs
1.5
3.0E-03
数階
小最1.0
数
階
2.0E-03
小
最
0.5
1.0E-03
0.0
0.00
1.00
2.00
最小行列式
(a) Rate = 2.0
3.00
4.00
0.0E+00
0.00
0.01
0.02
0.03
最小行列式
0.04
0.05
0.06
(b) Rate = 4.0
図 2.7. 最小行列式 (d) と最小階数 (m′ ) の関係
図 2.8(a) にデータレートが低い場合の最小行列式と BER の関係を示す.図 2.7 と同じ分散
行列の集合に対して BER を評価した.図 2.8(a) では最小行列式が大きくなるほど BER が
低くなる傾向が見られる.最小行列式が小さい場合でも良い BER を記録する分散行列がある
が,これはさらに高い S/N 比で性能が劣化すると考えられる.
図 2.8(b) にデータレートが高い場合の最小行列式と BER の関係を示す.高レートでは最
小行列式と BER の相関がなくなりがちになるが,パラメータの優劣は比較できる.この図は
2.4 硬判定による復号
15
GSTSK(2,N ,2,16,1) の 16–PSK と 16–QAM のどちらが優れた性能を発揮するのか確認する
ために作成した.それぞれの分散行列をランダムに生成し,そのときの最小行列式と BER を
プロットしていく.この図を見れば明らかに,GSTSK(2,N ,2,16,1) の場合は 16–QAM より
も 16–PSK の方が優れた BER を達成できることが分かる.
0.00123
GSTSK(2,1,2,2,1), BPSK, 7187DMs
10
0 -2
0 -3
10
0
BER at 20[dB] (1e6 [bits] received)
BER at 15[dB] (1e5 [bits] received)
0 -1
10
GSTSK(2,2,2,16,1), 16-PSK
GSTSK(2,2,2,16,1), 16-QAM
0.00103
0.00083
0.00063
0.00043
0.00023
1
最小行列式
2
3
(a) 低レートの場合の相関関係 (Rate=2.0)
0
最小行列式
0.005
0.01
0.015
(b) 高レートの場合の相関関係 (Rate=4.0)
図 2.8. 最小行列式と BER の関係.シミュレーションの最小試行回数は 104 回とした.(a) 低
レートの場合の BER は 15 dB におけるシミュレーション値であり,(b) 高レートの場
合の BER は 20 dB におけるシミュレーション値である.
2.4 硬判定による復号
送信された時空間ブロック符号を受信機において推定する方法について説明する.硬判定
(Hard Detection) はビット列の各ビットが 0-1 のどちらにあてはまるのかを二値で判定する
が,軟判定 (Soft Detection) は「0 である確率」を計算し多値で判定する.本研究では軟判定
による復号が必須である誤り訂正符号を考慮していないため,復号方式は硬判定に限定する.
送信されたビット列を最尤推定する方法について説明する.b1 と b2 をそれぞれ B1 , B2
ビットの任意のビット列として,推定したビット列を bˆ1 , bˆ2 と表記する.式 (2.1) の両辺に列
ベクトル化を施して式 (2.13) を得る.
¯
¯
¯
Y(i)
= H(i)χK(i)
+ V(i)
ここで,それぞれの行列の定義は次のとおりである.
¯
Y(i)
= vec(Y(i)) ∈ CN T ×1
¯
H(i)
= IM ⊗ H(i) ∈ CN M ×M M
χ = [vec(A1 ), ..., vec(AQ )] ∈ CM T ×Q
[
]T
K(i) = ..., s(1) (i), ..., s(P ) (i), ... ∈ CQ×1
¯
V(i)
= vec(V(i)) ∈ CN T ×1
(2.13)
16
第 2 章 時空間ブロック符号
¯
最大事後確率 (Maximum A Posteriori, MAP) 推定では受信信号 Y(i)
を観測したときの
¯
事後確率 P(K(i)|Y(i))
を最大化する K(i) を探索する.ベイズの定理より事前確率と事後確
率の関係は式 (2.14) で与えられる.
¯
P(K(i)|Y(i))
=
¯
P(Y(i)|K(i))P(K(i))
¯
P(Y(i))
(2.14)
¯
¯
式 (2.14) において P(Y(i))
と P(K(i)) は一定である.つまり,事後確率 P(K(i)|Y(i))
を最
¯
¯
大化することは尤度 P(Y(i)|K(i))
を最大化することと等しい.尤度 P(Y(i)|K(i))
は次式で
与えられる.
¯
P(Y(i)|K(i))
=
(
)
2
¯
¯
1
∥Y(i)
− H(i)χK(i)∥
exp −
(πN0 )N T
N0
(2.15)
つまり,すべての b1 ,b2 の組み合わせに対して,この尤度関数を最大化するようなビットの
組み合わせを探せばよい.
¯
(bˆ1 , bˆ2 ) = arg max P(Y(i)|K(i))
(2.16)
(b1 ,b2 )
2
¯
¯
= arg min ∥Y(i)
− H(i)χK(i)∥
(2.17)
(b1 ,b2 )
= arg min
(b1 ,b2 )
¯
Y(i)
−
Q
∑
¯
kq {H(i)χ}
q
2
(2.18)
q=1
¯
¯
ここで,{H(i)χ}
q は H(i)χ の q 行目を表す.尤度関数を求めるために式 (2.1) を列ベクトル
化したが,ここまで変形すれば元に戻しても計算上は問題がない.式 (2.17) は式 (2.19) のよ
うに書き換えられる.
(bˆ1 , bˆ2 ) = arg min ∥Y(i) − H(i)S(i)∥2F
(2.19)
(b1 ,b2 )
2.5 性能上限
コヒーレント検出による MIMO の符号化手法の性能を信頼性とチャネル容量の二つ
の側面から評価する.無線通信の信頼性は PEP,Symbol Error Rate (SER, シンボル誤
り率),Bit Error Rate (BER, ビット誤り率) などで評価できる.本節では BER を用い
て各手法を比較する.また,チャネル容量としては Continuous-input Continuous-output
Memoryless Cahnnel (CCMC) 容量 (シャノン容量) ではなく Discrete-input Continuousoutput Memoryless Channel (DCMC) 容量 [34] を用いる.ちなみに,本節に載せているグ
ラフと同じ結果を再現できるようするために,シミュレーションにおいて使った分散行列はす
べて巻末に付録として添付する.
2.5.1 信頼性
本項では L–PSK,SM,OSTBC,GSTSK の信頼性をモンテカルロシミュレーションに
よって評価する.チャネルは狭帯域モデルを仮定し,レイリーフラットフェージングの影響を
2.5 性能上限
17
受けるものとする (システムモデルについて詳しくは 2.1 節へ).また,検出器は演算量が大き
いかわりに最適性能が保証されている最尤推定法を用いる (最尤推定法について詳しくは 2.4
節へ).図中でダイバーシティオーダーを D と表記する.ダイバーシティオーダーとは高 S/N
比における BER 曲線の傾きである.
すべての手法を公平な条件のもとで比較した.具体的には,一つのグラフの中には同じデー
タレートの手法だけを載せるようにした.また,すべての手法において送信エネルギーは同一
1100
1100
0 -1
10
0 -1
10
0 -2
10
0 -2
10
D=1
D=1
10
0 -3
10-1
10
0 -4
BER
BER
の値に統一した.
10 [dB]
10
0 -5
10
0 -6
10
0 -7
0
5
10
15
20
SNR [dB]
0 -4
10
10-2
10
0 -6
10 [dB]
25
30
D=2
10
0 -5
D=2
QPSK(1Tx,1Rx)
SM(2Tx,1Rx), BPSK
OSTBC(2Tx,1Rx), QPSK
10
0 -3
35
10
0 -7
0
(a) Rate = 2.0
8-PSK(1Tx,1Rx)
SM(2Tx,1Rx), QPSK
OSTBC(2Tx,1Rx), 8-PSK
5
10
15
20
SNR [dB]
25
30
35
(b) Rate = 3.0
図 2.9. (M, N ) = (1, 1) の L–PSK,(M, N ) = (2, 1) の SM,(M, N ) = (2, 1) の OSTBC の
BER を比較した結果.シミュレーションの最小試行回数は 108 回とした.
図 2.9 (a), (b) に送信アンテナ数 M = 2 の場合について,L–PSK,SM,OSTBC の BER を
比較した結果を示す.簡単のため受信アンテナ数 N は 1 本にした.これらの図から,OSTBC
は S/N 比が 10 dB 変化したときに BER がちょうど 10−2 になっているので,ダイバーシティ
オーダーは 2 であり,フルダイバーシティを達成していることが分かる.また,SM のダイ
バーシティオーダーは SISO の L–PSK と同じく N であり,SM の BER は SISO の L–PSK
に劣ることも分かる.SM は信頼性の向上を目的とした手法ではない.これらの傾向はデータ
レート 2.0, 3.0 [b/symbol] 両方の場合に見られる.
図 2.10 にデータレートを一定に保ちながら,SM のパラメータを変化させた場合の BER を
比較した結果を示す.参考のため (M, N ) = (1, 1) の 16–PSK と (M, N ) = (2, 1), 16–PSK
を使った OSTBC の BER についても載せた.この図から,SM の BER は (M, L) = (2, 8)
の場合が一番優れていて,(4, 4), (8, 2) の場合は同じくらいの性能であることが分かる.つま
り,SM では,同じデータレートならば送信アンテナ数 M をできるだけ少なくした方が良い.
また,図 2.9,図 2.10 より,送信アンテナ数 M = 2 の場合は OSTBC の信頼性が最も優れて
いる.しかし,OSTBC は M > 2 の場合にデータレートが損失するので,他の手法を使う必
要がある.
第 2 章 時空間ブロック符号
18
100
1
0 -1
10
0 -2
10
BER
D=1
0 -3
10
0 -4
10
0 -5
10
0
16-PSK(1Tx,1Rx)
SM(2Tx,1Rx), 8-PSK
SM(4Tx,1Rx), QPSK
SM(8Tx,1Rx), BPSK
OSTBC(2Tx,1Rx), 16-PSK
5
10
15
20
SNR [dB]
D=2
25
30
35
図 2.10. (M, N ) = (1, 1) の 16–PSK,同一レートを保ちながら (M, N ) と L を変化させた
SM,(M, N ) = (2, 1), 16–PSK の OSTBC の BER を比較した結果.シミュレーショ
ンの最小試行回数は 108 回,データレートは 4.0 [b/symbol] とした.
1 0
10
1 0
10
0 -1
10
0 -1
10
0 -2
10
0 -2
10
0 -4
10
0 -5
10
0 -8
10
0
0 -4
10
0 -5
10
0 -6
10
0 -7
10
D=1
0 -3
10
D=1
BER
BER
0 -3
10
QPSK(1Tx,1Rx)
GSTSK(3,1,3,3,3), 4-QAM
5
10
15
20
SNR [dB]
(a) M = 3
0 -7
10
25
30
D=4
0 -6
10
D=3
35
0 -8
10
0
QPSK(1Tx,1Rx)
GSTSK(4,1,4,16,1),16-PSK
5
10
15
20
SNR [dB]
25
30
35
(b) M = 4
図 2.11. (M, N ) = (1, 1) の QPSK と GSTSK(M = 3, 4) の BER を比較した結果.シミュ
レーションの最小試行回数は 108 回,データレートは 2.0 [b/symbol] とした.
図 2.11 に M = 3, 4 の場合の GSTSK の BER を示す.参考のため (M, N ) = (1, 1) の
Quaternary PSK (QPSK) の BER についても載せた.SM はデータレートを柔軟に設定す
ることができないので,図中に SM の BER を載せることはできない.一方,GSTSK は色々
なシステム設定に柔軟に対応することができる.これらの図から GSTSK は (a) M = 3, (b)
M = 4 いずれの場合もフルダイバーシティを達成できていることが分かる.
2.5 性能上限
19
2.5.2 チャネル容量
チャネル容量は伝送チャネルにおいて実現しうるデータレートの上界である.MIMO の
チャネル容量には CCMC 容量と DCMC 容量 [34] の二つがある.前者はシャノン容量とし
ても知られ,帯域幅と S/N 比だけに依存する.一方後者は,送信シンボルを PSK/QAM に
制限しフェージングの影響を考慮した場合のチャネル容量である.GSTSK は既存の主要な
MIMO の符号化手法をカバーできるので,本項では GSTSK の DCMC 容量について説明す
る.論文 [34] では DCMC 容量の導出過程が省略されている.DCMC 容量の導出過程を理解
することは,シミュレーションコードの正しい実装と数学的な性能解析の理解に役立つので,
ここでは省略せずにすべて解説する.
GSTSK において K(i) は入力された b1 , b2 に一対一に対応して 2B 種類が生成されうる.
簡単のため以降の式では送信インデックス (i) を省略して表記する.また,任意のビット列
を 10 進数に変換する関数 bin2dec(·) を導入する.とあるビット列 b1 , b2 に対応する K を,
in = bin2dec(b1 ) + 2B1 bin2dec(b2 ) として,Kin (1 ≤ in ≤ 2B ) と表記する.このとき,
GSTSK の DCMC 容量は式 (2.20) で与えられる.
ML
CDCMC
1
=
T
2B ∫
∑
max
P(K1 ),...,P(K2B )
[
out=1
· P(Kout ) log2 ∑2B
∫∞
式 (2.20) において,
−∞
···
in=1
∫∞
−∞
1
=
T
2
∑
max
P(K1 ),...,P(K2B )
−∞
∫
···
∞
−∞
¯ out )
P(Y|K
]
¯ out )
P(Y|K
¯
dY
¯
P(Y|Kin )P(Kin )
(2.20)
¯ out )dY
¯ = 1 なので,
P(Y|K
B
ML
CDCMC
∞
out=1
[
[
E P(Kout ) log2 ∑2B
in=1
¯ out )
P(Y|K
¯ in )P(Kin )
P(Y|K
]]
(2.21)
式 (2.21) は Kin (1 ≤ in ≤ 2B ) が等しく選ばれるとき最大化される.ここで P(K1 ) =
· · · = P(K2B ) = 1/2B を仮定すると,式 (2.21) は式 (2.23) のように変形できる.
2B
2B
∑
∑
¯
1
1
P(Y|Kout )
ML
=
CDCMC
E log2 2B − log2
B
¯ in )
T out=1 2
P(Y|K
in=1
2B
2B
2B
∑
¯ out )
1
1 ∑
P(Y|K
1 ∑
= B
B− B
E log2
¯ in )
T 2 out=1
2 out=1
P(
Y|K
in=1
(2.22)
(2.23)
=B
ここで,式 (2.23) 中の
¯
P(Y|K
out )
¯
P(Y|K
in )
¯ = HχK
¯
¯
を求める.Y
out + V を仮定し,式 (2.15) を使
20
第 2 章 時空間ブロック符号
うと,
¯
P(Y|K
out )
¯
P(Y|K
in )
は次式で与えられる.
¯ out )
P(Y|K
¯ in ) = exp
P(Y|K
= exp
(
2
2
¯ − HχK
¯
¯
¯
−∥Y
in ∥ + ∥Y − HχKout ∥
N0
(
¯
¯ 2 + ∥V∥
¯ 2)
−∥Hχ(Kout − Kin ) + V∥
)
(2.24)
(2.25)
N0
(
)
≡ exp Ψin
out
(2.26)
最終的に,DCMC 容量は式 (2.27) で与えられる.
ML
CDCMC
2B
2B
∑
1
1 ∑
=
B− B
E log2
exp(Ψin
out )
T
2 out=1
(2.27)
in=1
1.0
4.0
3.0
2.0
Spatial Modulation, BPSK
N=1, M=2,4,8,16
1.0
0.0
DCMC Capacity []b/symbol]
DCMC Capacity []b/symbol]
5.0
0.9
0.8
0.7
0.6
0.5
0.4
2x2 OSTBC, BPSK
N=1,2,4,8,16
0.3
0.2
0.1
0.0
-20 -15 -10
-5
0
5 10
SNR [dB]
15
20
25
(a) SM, BPSK (N = 1, M = 2, 4, 8, 16)
30
-30 -25 -20 -15 -10 -5
0
SNR [dB]
5
10
15
20
(b) BPSK を 埋 め 込 ん だ 2x2 OSTBC (N =
1, 2, 4, 8, 16)
図 2.12. SM と 2x2 OSTBC の DCMC 容量.S/N 比が 1 dB 変化するごとに 104 回のシミュ
レーションを行った.
モンテカルロシミュレーションによって DCMC 容量を計算した.図 2.12 に SM と OSTBC
の DCMC 容量を示す.図 2.12 (a) は受信アンテナ数 N = 1 の制約のもと,送信アンテナ数
M を増やしたときの SM のチャネル容量の変化を表している.図 2.9, 2.10 で確認したよう
に,SM は同一データレートのもとで送信アンテナ数 M を増やしても信頼性は全く改善しな
い (むしろ悪化する).図 2.12 (a) では,送信アンテナ数 M に対応して単調にチャネル容量が
改善している.これにより,SM の利点が確認できた.図 2.12 (b) は送信アンテナ数 M = 2
の制約のもと,受信アンテナ数 N を増やしたときの OSTBC のチャネル容量の変化を表して
いる.受信アンテナ数 N の増加にともなってチャネル容量が単調に改善している.この傾向
は OSTBC 以外のあらゆる手法において同様に見られる.
図 2.13 に GSTSK(2, 1, 2, 4, P ), BPSK (1 ≤ P ≤ 4) の DCMC 容量を示す.DCMC 容量
は P = 3, 4, 2, 1 の順番で大きい.図 2.13 から,GSTSK のパラメータ P を変化させるこ
とによってチャネル容量が様々に変化することが分かる.
2.5 性能上限
21
DCMC Capacity []b/symbol]
2.5
2.0
1.5
1.0
GSTSK(2,1,2,4,P),
BPSK, P=1,2,4,3
0.5
0.0
-20
-15
-10
-5
0
5
SNR [dB]
10
15
20
図 2.13. GSTSK(2, 1, 2, 4, P ), BPSK (1 ≤ P ≤ 4) の DCMC 容量.S/N 比が 1 dB 変化す
るごとに 104 回のシミュレーションを行った.
BER at 15[dB] (1e5 [bits] received)
0 -1
10
GSTSK(2,1,2,2,1), BPSK, 7187DMs
10
0 -2
0 -3
10
0.41
0.46
0.51
0.56
DCMC Capacity
0.61
図 2.14. DCMC 容量と BER の関係.BER は 15 dB における最小試行回数 104 回のシミュ
レーション値.GSTSK(2,1,2,2,1), BPSK の場合について 7187 セットの分散行列を
ランダム生成した.
図 2.14 に DCMC 容量と BER の関係について調べた散布図を示す.この図から分かると
おり,DCMC 容量と BER の間には強い相関がある.本研究では分散行列はすべて最小行列
式を評価関数として探索したが,このように DCMC 容量を評価関数として探索することもで
きる.DCMC 容量を評価関数として生成した分散行列はターボ符号 [35] などの誤り訂正符号
と組み合わせたときに優れた性能を発揮する.提案手法手法の誤り訂正符号化は今後の課題で
あるため詳しくは省略する.
22
第3章
差動時空間ブロック符号
2 章ではコヒーレント検出を前提とした MIMO のための符号化手法について説明した.コ
ヒーレント検出では受信機において完璧なチャネル情報が得られることを仮定して時空間ブ
ロック符号が設計されている.シンボル時間に対してチャネルがゆっくりと変化する環境で
は,通常のデータ送信にパイロット信号を挟むことによって正確なチャネル情報を推定するこ
とができる.一方,高速移動体通信などチャネルが急激に変化する環境で正確なチャネル情報
を推定するのは困難な課題であり,正確なチャネル推定のためのオーバーヘッドおよび推定演
算量は無視できない.加えて,そのような環境で得られたチャネル情報の推定誤差はコヒーレ
ント検出による手法に深刻な性能低下をもたらす.
本章ではまず,送信機と受信機の両方でチャネル推定が不要な MIMO のための差動符号化
手法について説明する.次に,これまで提案されてきた手法のうち代表的なものを紹介する.
最後に,それぞれの手法の性能を評価し,コヒーレント検出による手法と比較する.
3.1 システムモデル
本章のシステムモデルは 2 章のものに近いため,ここでは差分のみを説明する.モデルを記
述するための変数も 2 章と同じものを断りなく使う.2 章と同様に時空間ブロック符号の受信
信号を式 (3.1) のように表現する.
Y(i) = H(i)S(i) + V(i)
(3.1)
ただし,送信符号の作り方は大きく異なる.式 (3.2) の手順で送信符号を生成する.
S(i) = S(i − 1)X(i) ∈ CM ×T
(3.2)
ここで,X(i) はユニタリ行列とする.また,送信機と受信機の両方で S(0) = IM という設定
を既知とする.式 (3.2) のような符号の作り方を差動符号化と呼ぶ.X(i) がユニタリ行列で
あるかぎり,送信符号 S(i) のノルムは一定であり続ける.
逆に X(i) がユニタリ行列でない場合は ∥S(i)∥2F = ∥S(0)X(1) · · · X(i − 1)X(i)∥2F は 0 に収
3.2 符号化
23
束するか無限大に発散するかのどちらかになる *1 .そこで,差動符号化するときに行列のノル
ムを変化させる正規化係数をかけ合わせることによって,ユニタリ行列でなくてもそれと同様
の効果を得られる手法が提案されている [37, 38].具体的には式 (3.3) のように,差動符号化
するときに直前の符号 X(i − 1) のノルムで割ることによって送信符号 S(i) のノルムを一定に
保つ.
S(i) =
S(i − 1)
X(i) ∈ CM ×T
∥X(i − 1)∥F
(3.3)
送信符号が非ユニタリ行列であるこれらの手法は本研究と直接の関係はないため,詳しくは省
略する.
式 (3.2) と式 (3.3) による差動符号化は M = T を要求する.これによって送信符号は常に
フルランクになりうる.欠点として,送信アンテナ数 M の増加によって受信機での演算量が
増えてしまうことが挙げられる.また,M の増加にともなって T も大きくなるので,デー
タレートの低下やシステムの遅延に気をつける必要がある.具体的には,データレート R は
R = B/T で定義される.B を一定にしたまま M (= T ) を大きくすると R が減少するので,
M の増加にともなって B を適切に設定する.
3.2 符号化
本節では MIMO のための主な差動時空間ブロック符号の作り方について,ユニタリ行列
X(i) を生成するところまでを説明する.X(i) を生成したあとは式 (3.2) にしたがって送信符
号 S(i) を作ればよい.変調方式として PSK / Pulse-Amplitude Modulation (PAM, パルス
振幅変調) を利用し,それらの信号点数を L とおく.
3.2.1 DOSTBC
2.2.1 項で説明した OSTBC は送信符号がユニタリ行列なのでそのまま差動符号化すること
ができ,これは Differential OSTBC (DOSTBC, 差動直交時空間ブロック符号) と呼ばれて
いる.送信アンテナ数 M = 2 の場合の Alamouti 法の送信符号は式 (3.4) のとおりである.
1
X(i) = √
2
[
s1
s2
−s∗2
s∗1
]
(3.4)
ここで,X(i) は ∥s1 ∥ = ∥s2 ∥ = 1 を満たすかぎりユニタリ行列である.つまり,送信シンボ
ルは L–PSK に限定される.証明を以下に示す.
[
[ ∗
]
]
1
1
s1 −s∗2
s1 s∗2
√
X(i)X(i) = √
∗
2 s2 s1
2 −s2 s1
[
]
2
2
1 ∥s1 ∥ + ∥s2 ∥
0
=
= I2
0
∥s1 ∥2 + ∥s2 ∥2
2
H
*1
唯一の例外として準直交時空間ブロック符号がある [36].この符号は非ユニタリ行列にもかかわらず差動符号
化によってノルムが変化しない.しかし,送信アンテナ数 M に厳しい制限がある.また,この符号で高いデー
タレートを実現するのは難しい.
第 3 章 差動時空間ブロック符号
24
確かに X(i) はユニタリ行列なので,OSTBC はそのまま差動符号化可能である.
2.2.1 項では OSTBC の利点の一つとして受信シンボルが簡単な演算によって推定できるこ
とを挙げた.DOSTBC でも受信シンボルの推定コストを劇的に下げることができる.詳しく
は [39] を参照してほしい.
3.2.2 DLDC
Hassibi と Hochwald はコヒーレント検出を利用した Linear Dispersion Code (LDC, 線形
分散符号) [40] をケーリー変換によって差動符号化した Differential LDC (DLDC, 差動線形
分散符号) [41] を提案した.ケーリー変換はユニタリ行列 X(i) を生成するために使われる.
これによって,高いデータレートを達成可能な LDC の特性を活かした差動符号化手法を実現
した.
PAM
Source
B
S/P
PAM
S(i 1)
s(1) (i)
A(1)(i)
Cayley
~
X(i) transform X(i)
s(Q) (i)
A(Q)(i)
Delay
S(i)
1
Space-time
mapper M
図 3.1. DLDC の送信機の内部構造
図 3.1 に DLDC の送信機の内部構造を示す.この図を用いて DLDC の符号化について説
明する.入力されるビット列のビット幅は B = Q log2 L とする.このとき,DLDC のデータ
レートは LDC と同様に式 (3.5) で与えられる.
RDLDC =
B
Q log2 L
=
T
T
(3.5)
入力ビット列は log2 L ビットごとの Q グループに分解され,Q 個の L–PAM シンボル
s(q) (i) (1 ≤ q ≤ Q) に変調される.あらかじめ Q 個の分散行列 A(q) (i) を用意しておき,こ
˜
れとシンボル s(q) (i) をかけて足しあわせたものを X(i)
とする (式 (3.6)).
˜
X(i)
=
Q
∑
s(q) (i)A(q) (i)
(3.6)
q=1
ここで,分散行列はすべてエルミート行列とする.エルミート行列に実数をかけて足しあわ
˜
せてもエルミート行列のままなので,X(i)
はエルミート行列である.LDC では変調方式と
して L–PSK/QAM が利用可能であったが,DLDC はケーリー変換を使うため,変調方式が
˜
L–PAM に限定されてしまうという欠点がある.エルミート行列 X(i)
の歪エルミート行列
2
˜
* を式 (3.7) のようにケーリー変換してユニタリ行列 X(i) を生成する.
j X(i)
(
)(
)−1
˜
˜
X(i) = IM − j X(i)
IM + j X(i)
*2
歪エルミート行列 (Skew-Hermitian Matrix).反エルミート行列とも呼ばれる.
(3.7)
3.2 符号化
25
ケーリー変換によって生成した X(i) がユニタリ行列であることは次のように証明できる *3 .
(
H
X(i)X(i) = IM
(
= IM
˜
− j X(i)
˜
− j X(i)
)(
IM
˜
+ j X(i)
IM
˜
+ j X(i)
)(
)−1 {(
)−1 ((
IM
˜
− j X(i)
IM
˜
+ j X(i)
)(
IM
˜
+ j X(i)
)H )−1 (
)−1 }H
˜
IM − j X(i)
)H
(
)(
)−1 (
)−1 (
)
˜
˜
˜
˜
= IM − j X(i)
IM + j X(i)
IM − j X(i)
IM + j X(i)
(
)(
)−1 (
)(
)−1
˜
˜
˜
˜
= IM − j X(i)
IM + j X(i)
IM + j X(i)
IM − j X(i)
(
)
(
)−1
˜
˜
= IM − j X(i)
IM IM − j X(i)
= IM
3.2.3 DSTSK
DLDC [41] において使われているケーリー変換のアイディアを参考に STSK を差動符号化
したのが Differential STSK (DSTSK, 差動時空間偏位変調) [21] である.STSK における復
号処理にはチャネル情報が必須であるが,ケーリー変換によって複合処理にチャネル情報が必
要ない STSK を実現した.
B1
Source
S/P
PAM
S(i 1)
A(i)
AQ
B2
B
A1
Cayley
~
X(i) transform X(i)
s(i)
Delay
S(i)
1
Space-time
mapper M
図 3.2. DSTSK の送信機の内部構造
図 3.2 に DSTSK の送信機の内部構造を示す.この図を用いて DSTSK の符号化について
説明する.まず入力されたビット列は B1 ビットと B2 ビットに分けられる.B1 ビットは分
散行列一つの選択に,B2 ビットは PAM シンボル一つの選択に使われる.つまり,Q 個の分
散行列を用意し,L–PAM 変調を使う場合,B1 = ⌊log2 Q⌋ ビット,B2 = log2 L ビットとな
る.ここで B = B1 + B2 とする.DSTSK のデータレートは,STSK と同様に式 (3.8) で与
えられる.
RDSTSK =
⌊log2 Q⌋ + log2 L
B
=
T
T
(3.8)
あらかじめ用意する Q 個の分散行列 A(q) (i) は,DLDC と同様にエルミート行列とする.選
˜
んだ分散行列を A(i),変調したシンボルを s(i) として,エルミート行列 X(i)
を式 (3.9) のよ
*3
)−1 (
)
(
)(
)−1
˜
˜
˜
˜
IM − j X(i)
IM + j X(i)
= IM + j X(i)
IM − j X(i)
を利用しているが,こ
)(
) (
)(
)
2
˜
˜
˜
˜
˜ (i) より明らかである.
+ j X(i)
IM − j X(i)
= IM − j X(i)
IM + j X(i)
= IM + X
変形の中で
(
れは IM
(
第 3 章 差動時空間ブロック符号
26
うに生成する.
˜
X(i)
= s(i)A(i)
(3.9)
˜
˜
最後に,このエルミート行列 X(i)
の歪エルミート行列 j X(i)
を式 (3.10) のようにケーリー変
換してユニタリ行列を生成する.
(
)(
)−1
˜
˜
X(i) = IM − j X(i)
IM + j X(i)
(3.10)
3.3 硬判定による復号
送信されたビット列を最尤推定する方法について説明する.この処理はほとんど 2.4 節と同
じなので差分のみを説明する.非コヒーレント検出による復号処理はコヒーレント検出と比べ
て前提条件と尤度関数が異なる.
差動時空間ブロック符号の複合処理では,チャネル行列 H(i) は二つの連続するブロッ
クにおいて一定だと仮定する (つまり H(i) = H(i − 1)).S(i) = S(i − 1)X(i) および
Y(i − 1) = H(i − 1)S(i − 1) + V(i − 1) を利用して,式 (3.1) の受信信号 Y(i) を次のように
変形する.
Y(i) = H(i)S(i) + V(i)
= H(i − 1)S(i − 1)X(i) + V(i)
= (Y(i − 1) − V(i − 1)) X(i) + V(i)
= Y(i − 1)X(i) + V(i) − V(i − 1)X(i)
(3.11)
V′ (i)
式 (3.11) 中のノイズを表す行列 V′ (i) は CN (0, 2N0 ) の複素ガウス分布に従う.
b1 と b2 をそれぞれ B1 , B2 ビットのビット列として,推定ビット列を bˆ1 , bˆ2 と表記する.
これらの受信ビットを推定するためには,すべての b1 ,b2 の組み合わせに対して,次のノルム
を最小化する組み合わせを探せばよい.
(bˆ1 , bˆ2 ) = arg min ∥Y(i) − Y(i − 1)X(i)∥2F
(3.12)
(b1 ,b2 )
式 (3.11) 中にはチャネル行列 H(i) が含まれていないので,オーバーヘッドをともなうチャ
ネル推定は不要になった.一方,二つの連続するブロックを対象に処理を行うので,考慮すべ
きノイズの分散は 2 倍になる.これによって,非コヒーレント検出による手法はコヒーレント
検出による手法と比べて最低でも 3 dB 以上の性能劣化が生じる *4 .
*4
非コヒーレント検出による手法はノイズの電力が 2 倍になるため,コヒーレント検出による手法と比
べると等価的な S/N 比が半減する (式 (3.11)).このため,非コヒーレント検出による手法は最低でも
10 log10 2 = 3.01029... ≒ 3 dB 以上の性能劣化が生じる.
3.4 性能上限
27
3.4 性能上限
非コヒーレント検出による MIMO の符号化手法の性能を信頼性の観点から評価する.2 章
では信頼性に加えてチャネル容量の側面からも評価した.非コヒーレント検出による手法は数
学的な性能解析が難しく,まだ DCMC 容量が導出されていない.本節では信頼性の評価のみ
を行う.ちなみに,本節に載せているグラフと同じ結果を再現できるようするために,シミュ
レーションにおいて使った分散行列はすべて巻末に付録として添付してある.
3.4.1 信頼性
本項では差動 L–PSK,DOSTBC,DLDC,DSTSK の信頼性をモンテカルロシミュレー
ションによって評価する.参考のため,コヒーレント検出を使った手法である LDC と STSK
も対象に比較する.チャネルは狭帯域モデルを仮定し,受信機では最尤推定法を用いる.ま
た,すべての手法を公平な条件のもとで比較した (このシミュレーション条件について詳しく
は 2.5 節へ).
1 0
10
Differential BPSK(1Tx,1Rx)
STSK(2,1,2,2),BPSK
DSTSK(2,1,2,2),BPSK
DOSTBC(2Tx,1Rx),BPSK
0 -1
10
BER
10
0 -2
D=1
0 -3
10
10
0 -4
D=2
10-5
0
0
5
10
15
20
25
30
35
SNR [dB]
図 3.3. (M, N ) = (1, 1) の差動 BPSK,(M, N ) = (2, 1) の STSK, DSTSK, DOSTBC の
BER を比較した結果.シミュレーションの最小試行回数は 108 回,データレートは 1.0
[b/symbol] とした.
図 3.3 に送信アンテナ数 M = 2, データレート 1.0 [b/symbol] の場合に STSK, DSTSK,
DOSTBC の BER を比較した結果を示す.参考のため (M, N ) = (1, 1) の差動 BPSK の結果
についても載せた.この図から,STSK, DSTSK, DOSTBC はそれぞれフルダイバーシティ
を達成できていることが分かる (ダイバーシティオーダー D が D = M N = 2 となっている).
DSTSK と DOSTBC の BER はほぼ同じだが,DSTSK の方が約 0.1 dB だけ性能に優れる.
非コヒーレント検出による手法 (ここでは DSTSK) はコヒーレント検出による手法 (STSK)
と比べて必ず 3 dB 以上の損失が生じるはずだが,この図においては損失が 2 dB で済んでし
まっている.これは,STSK と DSTSK で分散行列を生成する仕組みが違うことが原因だろ
う.もし,STSK のために生成された符号をそのまま差動符号化できるような手法があれば,
第 3 章 差動時空間ブロック符号
28
その損失はちょうど 3 dB になるはずだ.この結果は,STSK(2, N, 2, 2), BPSK の信頼性を現
在よりも 1 dB 以上改善できる可能性があることを示している.ちなみに,2–PAM と BPSK
の信号点は等価であるとした.
1 0
10
Differential QPSK(1Tx,1Rx)
LDC(3,1,3,3),4-QAM
DLDC(3,1,3,3),4-PAM
0 -1
10
Differential 8-PSK(1Tx,1Rx)
STSK(2,1,2,16),QPSK
DSTSK(2,1,2,16),4-PAM
0 -1
10
BER
10
0 -2
BER
10
0 -2
1 0
10
D=1
D=1
0 -3
10
0 -3
10
10
0 -4
10
0 -4
D=2
D=3
10-5
0
0
5
10
15
20
25
SNR [dB]
(a) M = 3, Rate = 2.0
30
35
010-5
0
5
10
15
20
25
30
35
SNR [dB]
(b) M = 2, Rate = 3.0
図 3.4. LDC と DLDC, STSK と DSTSK の BER を比較した結果.参考のため (M, N ) =
(1, 1) の差動 L–PSK の結果も載せた.最小試行回数は 108 回とした.同一グラフ内で
はデータレートが同じになるように STSK / DSTSK / LDC / DLDC の (Q, L) を調
整した.
図 3.4 に (a) LDC(3,1,3,3),
4–QAM と DLDC(3,1,3,3), 4–PAM,加 え て ,(b)
STSK(2,1,2,16), QPSK と DSTSK(2,1,2,16), 4–PAM の BER を 比 較 し た 結 果 を 示
す.(M, N ) = (1, 1) の差動 QPSK と 8–PSK は参考のため載せている.(a), (b) ともに
LDC, DLDC, STSK, DSTSK はフルダイバーシティ (D = M N ) を達成できている.図 3.4
(a) において,DLDC は LDC と比べて約 4.5 dB の損失が生じている.3.0 dB を超えて
いるので理論と矛盾はない.一方,図 3.4 (b) において,DSTSK は STSK と比べて約 2.8
dB の損失が生じている.図 3.3 の場合と同じように損失が 3 dB 以内に収まった.これは
STSK(2, N, 2, 16), QPSK において分散行列の最適化不足が原因であり,改善の余地がある.
29
第4章
提案手法:Non-Coherent GSM
本章では,2 章で説明した GSTSK を 3 章で得られた知見によって差動符号化した Non-
Coherent GSM を提案する.提案手法は高いデータレートを維持したまま,チャネル推定の
ためのパイロット信号の挿入を不要にできる.提案手法の位置づけを図 4.1 に示す.この図に
おいて,DSTSK は STSK と対応し,DLDC は LDC と対応している.一方で,GSTSK と
対応する差動時空間ブロック符号はこれまで提案されてこなかった.Non-Coherent GSM は
GSTSK と対応する手法であり,DSTSK と DLDC を包括して表現できる.これによって,
複数の差動符号化手法を包括的に評価・解析できるようになる.また,提案手法は送信符号の
ユニタリ性を利用して差動符号化を実現しているが,送信符号がユニタリ行列である必要のな
い手法も提案されている [36–38].これらの非ユニタリ行列を利用した手法は,提案手法と直
接の関係はないため,本稿では省略する.
時空間ブロック符号
非コヒーレント検出
ユニタリ
非ユニタリ
差動符号化
コヒーレント検出
GSTSK
P=1
STSK
Non-Coherent GSM
P=Q
LDC
T >1
T=1
SM/SSK OSTBC
T=1
BLAST
P=1
DSTSK
P=Q
QAM-aided DOSTBC
QAM-aided DSTSK
DQOSTBC
DLDC
など
PSK-aided DOSTBC
図 4.1. 提案する Non-Coherent GSM の位置づけ
2 章と 3 章で紹介した手法は M 個の RF 回路を同時に使って性能を高めている.これは送
信アンテナ数 M が増えるとそのぶん送信機の製造コストとチャネル間干渉が増すことを意
味する.複数の RF 回路を同時に使う手法は大規模 MIMO や協調 MIMO の環境に適用しづ
らい.この問題を解決するため,単一の RF 回路において通信可能な大規模 MIMO や協調
MIMO を提案する.
本章ではまず,提案手法のシステムモデルと送受信機での処理,他の手法との関係について
30
第 4 章 提案手法:Non-Coherent GSM
説明する.次に提案手法の拡張手法を紹介し,それぞれの手法の分散行列の探索アルゴリズム
について説明する.最後にシミュレーションによって性能を評価し,提案手法の特性について
考察する.
4.1 システムモデル
本節では Non-Coherent GSM のシステムモデルについて説明する.i (i ≥ 1) を送信イン
デックスとして,信号の受信ブロックを式 (4.1) のように記述する [31].
Y(i) = H(i)S(i) + V(i)
(4.1)
式 (4.1) において Y(i) ∈ CN ×T は N 本のアンテナを備えた受信機で受信した信号を表す.
S(i) ∈ CM ×T は M 本のアンテナを備えた送信機から T 回に分けて送信される時空間ブロッ
ク符号である.チャネル行列 H(i) ∈ CN ×M と熱雑音行列 V(i) ∈ CN ×T はそれぞれ複素ガ
ウス分布 CN (0, 1) と CN (0, N0 ) に従うものと仮定する.ここで,N0 はノイズの分散を表す.
システムモデルについて詳しくは 2.1 節と 3.1 節を参照してほしい.
4.2 符号化
Non-Coherent GSM の符号化について,B ビットのビット列を入力するところから時空間
ブロック符号 S(i) を生成するところまで説明する.図 4.2 に送信機の内部構造を示す.
B1
Source
B
S/P
dispersion- A(1)(i)
matrix
activation
A1
AQ (P)
A (i)
PAM
PAM
B2
S(i 1)
Cayley
~
X(i) transform X(i)
Delay
S(i)
1
Space-time
mapper M
s(1) (i)
s(P) (i)
図 4.2. 提案する Non-Coherent GSM の送信機の構造
符号化に先立って,Q 個のエルミート行列 Aq ∈ CM ×T (1 ≤ q ≤ Q) を用意しておく.今
後 Aq を分散行列と呼ぶ.また,選択する分散行列の数を表すパラメータ P を導入し,Q 個
の分散行列から P 個を選ぶものとする.本提案手法は M, N, T, Q, P といったパラメータを
持っている.以降簡単のため,Non-Coherent GSM(M, N, T, Q, P ) という形式でシステムを
表現する.
ここで,新たに関数 f を式 (4.2) で定義する.
f(Q, P ) = 2⌊log2 (P )⌋
Q
(4.2)
4.2 符号化
すなわち,関数 f(Q, P ) は
(Q)
P
31
をもっとも近い 2 の冪乗に切り下げた数を返す.例えば,
f(3, 1) = 2 で f(4, 2) = 4 である.また,L を PAM の信号点数とする.L–PAM は任意の信号
点数の PAM 変調を表す.
次に,入力されたビット列と送信符号の対応について説明する.この送信機に入力さ
れたビット列は,B ビットごとに符号 S(i) に変換される.ここで,B1 = log2 f(Q, P ),
B2 = P log2 L とし,B = B1 + B2 とする.Non-Coherent GSM のデータレートは式 (4.3)
で与えられる.
⌊
R=
B
=
T
log2
(Q)⌋
P
+ P log2 L
T
[b/symbol]
(4.3)
送信符号 S(i) の作り方について詳しく説明する.まず,入力された B ビットのビット列
が S/P 変換され,B1 ビットと B2 ビットに分けられる.図 4.2 の分散行列の選択ブロック
で,B1 ビットのビット列に対応して Q 個の分散行列から P 個が選ばれる.ここで選ばれた
分散行列を A(p) (i) (1 ≤ p ≤ P ) と表記する.次に,B2 ビットのビット列に対して,P 個の
L–PAM シンボルが選ばれる.A(p) (i) と同様に,選ばれたシンボルを s(p) (i) (1 ≤ p ≤ P ) と
˜
表記する.そして,エルミート行列 X(i)
∈ CM ×T を式 (4.4) のように生成する.
˜
X(i)
=
P
∑
s(p) (i)A(p) (i)
(4.4)
p=1
分散行列 Aq (1 ≤ q ≤ Q) はエルミート行列で,L–PAM シンボルは実数である.エルミート
˜
行列に実数をかけて足しあわせてもエルミート行列のままなので,生成された複素行列 X(i)
はエルミート行列である.
ケーリー変換は任意の歪エルミート行列をユニタリ行列に変換する一対一の写像である
˜
[41].先ほど生成したエルミート行列の歪エルミート行列 j X(i)
を式 (4.5) のようにユニタリ
行列 X(i) に変換する.
(
)(
)−1
˜
˜
˜
X(i) = ζ(X(i))
= IM − j X(i)
IM + j X(i)
(4.5)
今後,ケーリー変換を ζ(·) と表記する.ケーリー変換の対象となる歪エルミート行列は正方行
列である必要がある.これによって,パラメータ設定に M = T という制約が生じる.この制
約は送信アンテナ数 M の増加によって送信ダイバーシティが改善されることを意味する.一
方で,M (= T ) が大きい場合はシステムの遅延やデータレートの低下に気をつける必要があ
る.また,任意の M × M 行列の足し算のオーダーは O(M 2 ),かけ算のオーダーは O(M 3 )
なので,計算コストの増加にも注意する.後述する拡張手法では送信符号の形を対角に制限す
ることによって計算コストの増加を抑える.詳しくは 4.5 節で説明する.
最後に,差動符号化の演算によって M × T の送信符号 S(i) を式 (4.6) のように生成する.
S(i) = S(i − 1)X(i) ∈ CM ×T
ここで,最初の送信符号 S(0) は単位行列 IM とする.
(4.6)
第 4 章 提案手法:Non-Coherent GSM
32
表 4.1. Non-Coherent GSM(M, N, T, 3, 2), 2–PAM の場合の符号化の具体例.一つの時空間
符号あたり B = B1 + B2 = 1 + 2 = 3 ビットを割り当てる.
情報源
(3 ビット)
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
選択する DM
(1)
A
(2)
(i), A
2–PAM シンボル
(i)
(1)
s
A1 , A2
A1 , A2
A1 , A2
A1 , A2
A1 , A3
A1 , A3
A1 , A3
A1 , A3
(i), s
(2)
エルミート行列
(i)
+1, +1
+1, −1
−1, +1
−1, −1
+1, +1
+1, −1
−1, +1
−1, −1
ユニタリ行列
˜
X(i)
X(i)
A1 + A2
A1 − A2
−A1 + A2
−A1 − A2
A1 + A3
A1 − A3
−A1 + A3
−A1 − A3
ζ(A1 + A2 )
ζ(A1 − A2 )
ζ(−A1 + A2 )
ζ(−A1 − A2 )
ζ(A1 + A3 )
ζ(A1 − A3 )
ζ(−A1 + A3 )
ζ(−A1 − A3 )
送信符号
S(i)
S(i − 1)ζ(A1 + A2 )
S(i − 1)ζ(A1 − A2 )
S(i − 1)ζ(−A1 + A2 )
S(i − 1)ζ(−A1 − A2 )
S(i − 1)ζ(A1 + A3 )
S(i − 1)ζ(A1 − A3 )
S(i − 1)ζ(−A1 + A3 )
S(i − 1)ζ(−A1 − A3 )
符号化の具体例を表 4.1 に示す.ここでは,Non-Coherent GSM(M, N, T, 3, 2), 2–PAM の
場合について考える.表 4.1 を見て分かるとおり,B = 3 ビットの情報源が S/P 変換され,
B1 = 1 ビットと B2 = 2 ビットに分けられる.B1 ビットに対応して,Q = 3 個の分散行列
から P = 2 個が選ばれる.ここで,選ばれた P = 2 個の分散行列を A(1) (i), A(2) (i) と表記
する.また,B2 ビットに対応して,P = 2 個の 2–PAM シンボル s(1) (i), s(2) (i) が選ばれる.
˜
そこで,エルミート行列 X(i)
を s(1) (i)A(1) (i) + s(2) (i)A(2) (i) のように足し合わせて作る.
˜
˜
次に,X(i)
の歪エルミート行列 j X(i)
をケーリー変換してユニタリ行列 X(i) にする.最後
に,X(i) は S(i) = S(i − 1)X(i) のように差動符号化され,送信符号 S(i) が作られる.
4.3 硬判定による復号
式 (4.1) の受信信号 Y(i) は式 (4.7) のように変形できる.
Y(i) = H(i)S(i) + V(i)
= H(i − 1)S(i − 1)X(i) + V(i)
= (Y(i − 1) − V(i − 1)) X(i) + V(i)
= Y(i − 1)X(i) + V(i) − V(i − 1)X(i)
(4.7)
ここで,チャネル行列 H(i) は二つの連続するブロックにおいて一定だと仮定している(つま
(
)
˜
り,H(i) = H(i − 1)).式 (4.7) の両辺に IM + j X(i)
をかけると式 (4.8) になる.
˜
Y(i) − Y(i − 1) = −j (Y(i) + Y(i − 1)) X(i)
N ×T
ˆ
Y(i)∈C
(
)
N ×M
ˆ
H(i)∈C
(
)
˜
˜
+ V(i) IM + j X(i)
− V(i − 1) IM − j X(i)
N ×T
ˆ
V(i)∈C
(4.8)
4.3 硬判定による復号
33
式 (4.8) の各項を次のように置き換える.
ˆ
Y(i)
= Y(i) − Y(i − 1)
ˆ
H(i)
= −j (Y(i) + Y(i − 1))
(
)
(
)
ˆ
˜
˜
V(i)
= V(i) IM + j X(i)
− V(i − 1) IM − j X(i)
.
ˆ
ˆ X(i)
˜
ˆ
こうして式 (4.8) を Y(i)
= H(i)
+ V(i)
のように表すことができた.この両辺を列ベク
トル化すると式 (4.9) になる.
)
(
ˆ
vec Y(i)
=
N T ×1
¯
Y(i)∈C
)
)
(
(
ˆ X(i)
˜
ˆ
vec H(i)
+ vec V(i)
(
)
N T ×1
¯
V(i)∈C
ˆ
˜ )
IM ⊗ H(i)
vec(X(i)
(4.9)
N M ×M M
¯
H(i)∈C
(
)
˜
式 (4.9) において vec X(i)
はさらに次のように展開できる.
( P
)
)
∑
(p)
(p)
˜
vec X(i) = vec
s (i)A (i)
(
p=1
=
P
∑
(
)
s(p) (i)vec A(p) (i)
p=1
[
]T
= [vec(A1 ), ..., vec(AQ )] ..., s(1) (i), ..., s(P ) (i), ...
χ∈CM T ×Q
K(i)∈CQ×1
最終的に,式 (4.7) を列ベクトル化した次の等価式 (4.10) を得る.
¯
¯
¯
Y(i)
= H(i)χK(i)
+ V(i)
(4.10)
ここで,等価式 (4.10) 中のそれぞれの行列を置き換える前の式は次のとおりである.
¯
ˆ
Y(i)
= vec(Y(i))
∈ CN T ×1
¯
ˆ
H(i)
= IM ⊗ H(i)
∈ CN M ×M M
χ = [vec(A1 ), ..., vec(AQ )] ∈ CM T ×Q
[
]T
K(i) = ..., s(1) (i), ..., s(P ) (i), ... ∈ CQ×1
¯
V(i)
= vec(V(i)) ∈ CN T ×1
K(i) は選択した P 個の分散行列と対応するシンボルをまとめたベクトルである.K(i) の
q (1 ≤ q ≤ Q) 行目が Aq と対応し,Aq が選択されている場合はそれと対応するシンボルが,
選択されていない場合は 0 が格納される.つまり,K(i) 中の非ゼロの要素は P 個ある.
送信されたビットを最尤推定する方法について説明する.b1 と b2 をそれぞれ B1 , B2 ビッ
トのビット列として,推定ビット列を bˆ1 , bˆ2 と表記する.これらの受信ビットを推定するた
34
第 4 章 提案手法:Non-Coherent GSM
めには,すべての b1 ,b2 の組み合わせに対して,次のノルムを最小化する組み合わせを探せば
よい.
2
¯
¯
(bˆ1 , bˆ2 ) = arg min ∥Y(i)
− H(i)χK(i)∥
(4.11)
(b1 ,b2 )
= arg min
(b1 ,b2 )
¯
Y(i)
−
Q
∑
¯
kq {H(i)χ}
q
2
(4.12)
q=1
¯
¯
ここで,{H(i)χ}
q は H(i)χ の q 行目を表す.4.4.2 項で式 (4.12) の演算量について考察す
る.ちなみに,式 (4.11) はフロベニウスノルムと列ベクトル化の性質を利用して式 (4.13) の
ように書き換えても問題ない.
(bˆ1 , bˆ2 ) = arg min ∥Y(i) − Y(i − 1)X(i)∥2F
(4.13)
(b1 ,b2 )
4.4 Non-Coherent GSM のユニバーサル性
本節では,提案手法である Non-Coherent GSM が他の非コヒーレント検出を利用した
MIMO の差動符号化手法を包括可能であることを示す.具体的には,提案手法は一部のパラ
メータを変更するだけで既存手法を表現できる.その柔軟性を活かした具体例として,本節で
はそれぞれの手法の複合処理における演算量についても考察する.
4.4.1 DSTSK / DLDC との関係
Non-Coherent GSM は DSTSK [21] と DLDC [41] をパラメータを限定した特別な場合と
して表現できる (図 4.3).
Non-Coherent GSM (M,N,T,Q,P)
Pൌ1
Differential STSK
PൌQ
Differential LDC
図 4.3. Non-Coherent GSM と他の MIMO の差動符号化手法の関係.
DSTSK DSTSK は Non-Coherent GSM のパラメータ P を 1 に限定した場合として表現で
きる.つまり,Q 個の分散行列のうちひとつだけが選択される.この制約によって,B1 と B2
が小さくなり多重化利得が小さくなる.しかし,この制約のおかげで受信ビットの最尤推定の
ための演算量が少なく済むという利点がある.
DLDC DLDC は Non-Coherent GSM を P = Q とした場合として表現できる.つまり,事
前に用意した Q 個の分散行列の中からすべてを選び,Q 個のシンボルとかけ合わせる.この
場合,B1 = log2 f(Q, P ) = 0 となり,分散行列の選択には何も情報が割り当てられない.式
(4.4) は式 (4.14) のように書き換えられる.
˜
X(i)
= s(1) (i) · A1 + · · · + s(Q) (i) · AQ
(4.14)
4.4 Non-Coherent GSM のユニバーサル性
35
4.4.2 演算量のトレードオフ
4.4.1 項より Non-Coherent GSM は DSTSK と DLDC を表現できることが分かった.こ
のとおり他の手法を包括できるので,Non-Coherent GSM に適用した数学的解析はパラメー
タを制限することによってそのまま他の手法にも適用することができる.そのような解析の一
例として受信機における最尤推定の演算量を扱う.ここで演算量を,式 (4.12) 中の実数のか
け算の回数を送信ビット列の長さで割った数として定義する.例えば,任意の二つの複素数
(a + bj) ∈ C, (c + dj) ∈ C のかけ算において実数は合計 4 回かけ合わされる (式 (4.15)).
(a + bj)(c + dj) = ac − bd + (ad + bc)j
(4.15)
この定義のもとで Non-Coherent GSM の受信機における演算量は式 (4.16) で与えられる.
N T Q(3M − 1) + 2N T (P + 1)f(Q, P )LP
B
(4.16)
3500
Complexity
P=7
2-PAMmodulated
ModulatedNon-Coherent
2-PAM
Non-Coherent GSM(2,1,2,8,P)
GSM(2,1,2,8,P)
3000
P=6
2500
P=5
2000
P=4
1500
P=Q=8
(DLDC)
1000
500
P=1
(DSTSK)
P=2
P=3
0
1
2
3
4
Normalized throughput [b/symbol]
5
図 4.4. Non-Coherent GSM(2, 1, 2, 8, P ), 2–PAM の受信機における演算量とデータレートの
トレードオフ.
図 4.4 は Non-Coherent GSM(2, 1, 2, 8, P ), 2–PAM の場合の受信機における演算量とデー
タレートのトレードオフを表している.選択する分散行列の数 P を P = 1 から P = 8 まで変
化させそれぞれを直線で結んだ.データレートが増えれば演算量も増えるのは当然だと思われ
るかもしれないが,ここでの演算量とは符号推定に費やされたかけ算の回数を送信ビット数で
割った数値である.4.4 節で述べたように,Non-Coherent GSM は P = 1 の場合は DSTSK
と,P = Q = 8 の場合は DLDC と対応している.それ以外の場合は本提案手法によって切り
開いた新しい領域である.図 4.4 より DSTSK の演算量の低さが際立っていることが分かる.
4 ≤ P ≤ 7 の場合,データレートがすべて同じにもかかわらず演算量には差がある.これらの
中でどれが一番優れるかはパラメータ (M, L) に依存する傾向が見られる.しかしながら,ま
だその規則性は見つけられておらず今後の課題となっている.
36
第 4 章 提案手法:Non-Coherent GSM
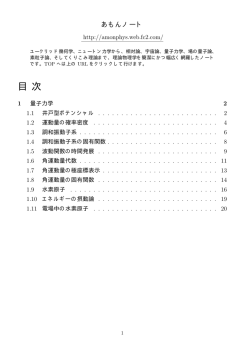
4.5 Single-RF Non-Coherent GSM
本節ではこれまで説明した Non-Coherent GSM をさらに拡張し,大規模 MIMO や協調
MIMO に適用しやすい手法として Single-RF Non-Coherent GSM を提案する.この手法は
SM や SSK と同じように送信シンボルのアンテナ間同期 (Inter-Antenna Synchronization,
IAS) を不要にできる.
この手法では,分散行列 Aq (1 ≤ q ≤ Q) を対角の実数行列に制限する.対角の実数行列は
エルミート行列の特殊な場合なので,Non-Coherent GSM の符号化をそのまま適用できる.
(m)
この拡張方式の分散行列は,ηq
(m)
∈ R ∧ ηq
̸= 0 (1 ≤ m ≤ M, 1 ≤ q ≤ Q) として式 (4.17)
のように表現できる.
(
)
Aq = diag ηq(1) , ..., ηq(M ) (1 ≤ q ≤ Q)
(4.17)
対角の歪エルミート行列をケーリー変換すると対角のユニタリ行列になる.対角のユニタリ行
列どうしは何度かけ合わせても対角行列のままなので,これによって送信符号 S(i) は常に対
角行列になる.
例えば,Single-RF Non-Coherent GSM(2, N, 2, 2, 1), 2–PAM の場合の分散行列を次に
示す.
[
A1 =
0.41 0.00
0.00 2.41
]
[
, A2 =
このとき,実際の送信符号 X は次のとおりである.
[
X1 =
[
X3 =
e0.25πj
0.00
e−0.25πj
0.00
0.00
]
e0.75πj
0.00
e
−0.75πj
[
2.41 0.00
0.00 0.41
e0.75πj
0.00
]
.
0.00
]
, X2 =
,
e0.25πj
]
[ −0.75πj
]
e
0.00
, X4 =
.
0.00
e−0.25πj
たしかにすべての送信符号が対角になっているので,単一 RF 回路でのシンボル送信が実現し
ている.
M × M 行列のかけ算のオーダーは O(M 3 ) だが,形を対角に制限することによって,その
オーダーは O(M ) にまで下がる.このような計算コストの削減によって,より送信アンテナ
数 M の増加に対応しやくすくなった.一方,この手法は分散行列を対角に制限しているので,
分散行列の探索空間が小さくなる.制限なしの Non-Coherent GSM の分散行列は M 2 Q 個の
実数変数を持つが,Single-RF の場合は M Q 個まで減少する.これによって送信符号間の距
離が短くなり,最適化による利得が小さくなる.
4.5.1 大規模 MIMO への適用
Single-RF Non-Coherent GSM は送信アンテナ数が非常に多い大規模 MIMO [5, 6] に適し
ている.本項では,大規模 MIMO の概要と今後の展望について説明したあと,その技術的な
課題を述べ,提案手法がこの環境に適している理由について説明する.
4.5 Single-RF Non-Coherent GSM
37
Rectangular
Linear
16
16
Cylindrical
Distributed
図 4.5. 大規模 MIMO のイメージ図 ([6] の Fig. 1 を参考に作成).アレイアンテナの配置方法
には色々な手法がある.図中の 2 次元アレイアンテナの一つがユーザの持つ端末に向
かって電波を局所照射している.
大規模 MIMO では 200 – 300 本のアンテナを備えるアレイアンテナが 1, 2 本のアンテナを
備える端末と通信する (図 4.5).数百本のアンテナを用いると,特定の狭い領域のみを対象に
電波を強められるため,ユーザ間干渉が軽減しセキュリティが向上する [6].また,同一周波
数帯により多くのユーザを収容でき,周波数の利用効率が高まる.アンテナは 1 次元・2 次元
に並べる方法や,円柱状に配置する方法,対象エリア内に分散させる方法などがある.
10ߣ
0
െ1
10ߣ
െ2
[dB]
െ3
െ4
െ5
(a) M = 10 ULA
(b) M = 100 ULA
図 4.6. TRBF による電波の局所照射のシミュレーション結果 [5].M は ULA のアンテナ数,
λ はシミュレーションで用いた電波の波長を表す.
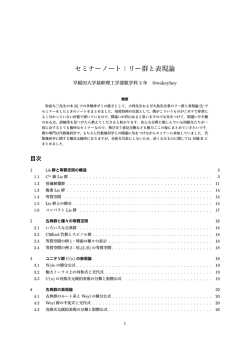
電波の送信エネルギーを特定の地点に集中させる手法として,Time Reversal (TR, 時間逆
行) [42] を用いた Time-Reversal Beam Forming (TRBF) が提案されている [5].この手法
ではまず,エネルギーを強めたい対象地点から CIR*1 を調べるための信号 (probe signal) を
発信する.M 本のアンテナで構成される ULA*2 がその信号を検出し,CIR を得る.ULA は
その CIR を利用して特定地点に信号を送信する
*3 .図
4.6 に TRBF のシミュレーション結
果を示す.送信アンテナ数 M = 10, 100 それぞれの場合について TRBF の性能を確認する.
*1
*2
*3
Channel Impulse Response,チャネルインパルス応答.遅延プロファイルとも呼ばれる.
Uniform Linear Array.一定の間隔でアンテナが並べられたリニアアレイアンテナ.図 4.5 の”Linear”が
ULA である.
この手順について詳しくは [5, 42] を参照してほしい
38
第 4 章 提案手法:Non-Coherent GSM
この図から TRBF は,(a) M = 10 の場合は全く局所照射できない一方で,(b) M = 100 の
場合は周囲より 5 dB (約 3.16 倍) 強く電波を局所照射できることが分かる.
例えば,大規模 MIMO の技術を活かした無線 LAN ルータが消費者に普及すれば,Internet
of Things (IoT, モノのインターネット) [43] の実現に貢献するだろう.大規模 MIMO は
MU-MIMO を高機能化した技術とみることもできる.MU-MIMO はユーザ間干渉を取り除
くことによってデータレートと信頼性を向上させ,IEEE 802.11ac や Long Term Evolution
Advanced (LTE-A) などの標準規格に組み込まれた [44, 45].もし大規模 MIMO の技術が実
用化されれば,MU-MIMO と同様に次世代の標準規格に組み込まれていくだろう.
大規模 MIMO の実現を妨げる課題として,アレイアンテナ間のパイロット汚染 (pilot
contamination) が挙げられる [46].パイロット汚染とは,限られたパイロット信号をセル内
の端末が使い尽くしてしまい,同じパイロット信号を使う端末が生じてしまう問題である.数
百本のアンテナを用いる大規模 MIMO において正確なチャネルを推定するのは難しい.アッ
プリンクとダウンリンクで異なる周波数を使う Frequency Division Duplex (FDD, 周波数分
割複信) は,それぞれのリンクで独立にチャネルを推定する必要があるため大規模 MIMO に
適さない.Time Division Duplex (TDD, 時分割複信) を利用してチャネルを推定する必要が
ある.TDD, Orthogonal Frequency-Division Multiplexing (OFDM, 直交周波数分割多重),
LTE を前提とした一般的な環境において,パイロット信号は約 200 種類を利用可能だ [6].高
い局所性によって周波数帯の利用効率を高めようとする大規模 MIMO にとって,同時に使え
る端末数に制限があるというのは致命的な問題である.
Single-RF Non-Coherent GSM はチャネル推定が不要である.これによってパイロット信
号の挿入を不要にできるので,大規模 MIMO のチャネル推定に起因する問題を解決できる.
また,同手法は大規模アレイアンテナの実装に必要な RF 回路を一つで済ませられる.数百
本のアンテナと同じ数だけ必要な RF 回路を一つで済ませられることによる製造コストの削
減幅は大きい.アンテナ数の増加にもより低コストで対応できる.Single-RF Non-Coherent
GSM は大規模 MIMO に適した手法である.
4.5.2 協調 MIMO への適用
Single-RF Non-Coherent GSM は複数のノードが互いに協力しあってデータを伝送する協
調 MIMO [7, 8] に適している.製造費用と設置スペースに厳しい制限のない基地局などであ
れば,多くのアンテナを搭載しても問題は生じにくい.しかし,携帯端末に多くのアンテナを
搭載すると,製造費用の増加と空間ダイバーシティの減少につながる.複数のアンテナで受信
した信号間の相関をなくすためには,搬送波の波長を λ として,アンテナ間に最低でも 0.4λ
以上の間隔を設ける必要がある [47].具体的には,2.5 GHz の場合約 5 cm,700 MHz の場合
約 17 cm 以上離れていないと,異なるアンテナで受信した信号に相関が生じ空間ダイバーシ
ティを得られない.この場合,手に収まる大きさの小型端末に 3 本以上のアンテナを搭載する
4.6 分散行列の探索アルゴリズムとその実装
39
のは難しい *4 .
Base Station
VAA Cell
図 4.7. 仮想アンテナアレイ
そこで,Dohler らは複数の小型端末が協力しあって一つの大きな端末として振る舞い,大規
模 MIMO のようなアンテナ数の多いシステムを仮想的に実現するための手法として Virtual
Antenna Array (VAA, 仮想アンテナアレイ) を提案し,そのチャネル容量を導出した [49].
図 4.7 に VAA の構成を示す.この図において,携帯端末は自律的に小さなグループを構成
し,その中で近距離通信を行う.また,そのグループが一つの端末であるかのように基地局と
長距離通信を行う.これは近距離通信と長距離通信が混ぜ合わさった異種混合ネットワーク
(Heterogeneous Network, HetNet) である [50, 51].VAA は使用周波数帯域の拡大と消費電
力の増加など様々な負担をともないながらも,協調しない場合と比べて高いチャネル容量を達
成する [49].
Single-RF Non-Coherent GSM は直接 VAA に適用できる.具体的には,M 台のノードに
よって構成されるグループにおいて,送信符号 S(i) ∈ CM ×T の m (1 ≤ m ≤ M ) 行目の要
素はノード m が送るものとする.一つのグループの中に含まれるノード数は状況によって大
きく変わるが,Non-Coherent GSM は任意の送信アンテナ数 M に対応できる.この柔軟性
は Single-RF Non-Coherent GSM にも同様にあるので,提案手法は任意のノード数の VAA
に適用可能である.また,提案手法はチャネル間干渉を避けられるので,グループ内での符号
送信時にノード間で電波が干渉しない.VAA にコヒーレント検出による手法を適用すると,
N 本のアンテナを備えた受信機は M 台のノードに対し M N 本のチャネル情報を推定する
必要がある.一方,提案手法にチャネル推定の必要はない.これらの理由により,Single-RF
Non-Coherent GSM は協調 MIMO に適している.
4.6 分散行列の探索アルゴリズムとその実装
Non-Coherent GSM の分散行列の探索アルゴリズムについて説明する.時空間ブロック符
号の評価基準は PEP の上界や DCMC 容量などがある.提案手法の分散行列を評価するため
に,本研究では RDC [31] を用いた(この基準について詳しくは 2.3 節へ).
通常の時空間ブロック符号であれば符号をそのまま送信するので RDC を直接適用できる.
*4
空間的な分離ではなく指向性の制御によってダイバーシティを得る技術がある (e.g. Electrically Steerable
Passive Array Radiator (ESPAR) アンテナ [48]).
第 4 章 提案手法:Non-Coherent GSM
40
しかし,Non-Coherent GSM は式 (4.6) でユニタリ行列 X(i) を差動符号化してから送信し
ている.つまり,X(i) を最適化したとしても,送信インデックス i ≥ 2 において送信符号が
X(1)X(2) · · · X(i) となり,元の X(i) と中身が異なってしまう.
そこで,RDC の最小行列式と BER の相関関係を調べた.結果を図 4.8 に示す.分散行列
のセットを約 3300 程度ランダムに生成し,最小行列式と 10 dB における BER のシミュレー
ション値をプロットした.
BER at 10[dB] (1e5[bits] received)
BER at 10[dB] (1e5[bits] received)
Non-Coherent GSM(2,2,2,4,2), 2-PAM, 3653DMs
0.22
0.17
0.12
0.07
0.02
0.00
0.10
最小行列式
0.20
0.30
0.40
(a) Non-Coherent GSM(2,2,2,4,2), 2–PAM
0.26
Non-Coherent GSM(2,2,2,4,2), 4-PAM, 3380DMs
0.24
0.22
0.20
0.18
0.16
0.14
0.12
0.10
0.000
最小行列式
0.005
0.010
(b) Non-Coherent GSM(2,2,2,4,2), 4–PAM
図 4.8. Non-Coherent GSM の最小行列式と BER の関係.BER は 10 dB における最小試行
回数 104 回のシミュレーション値.(a)(b) ともに 3000 以上の分散行列を生成した.
図 4.8 から分かる通り,最小行列式と BER の間には確かに相関関係がある.Non-Coherent
GSM の送信符号はユニタリ行列なので,差動符号化による影響は軽いようだ.最小行列式を
分散行列の評価関数として使っても問題ないことが分かった.本研究では,RDC の最小行列
式を評価関数として,反復局所探索法 (Iterated Local Search) [52] を用いて最適な分散行列
を探索する.
図 4.9 を使って探索アルゴリズムについて説明する.反復局所探索法では,最初に初期解と
なる分散行列をランダムに生成する.次に,その生成した分散行列を少し変更した分散行列
を Nb セット生成する.ここでの変更とは,各要素の振幅と位相を少しづつ変更することを指
す.変更するときは分散行列のエルミート性を保つ必要がある点に注意する.こうして生成し
た Nb セットの分散行列すべてに対して,最小行列式 (評価値) を計算する.ここで,評価して
いる途中の評価値がこれまでの最高評価値より良くならないことが確定したら,その分散行列
セットの評価を打ち切る (枝刈り).Nb セットの中で最も評価値の高かったものを最良近傍と
して採択し,次はその最良近傍をベースとしさらに近傍を Nb セット生成する.このように分
散行列を改善していくと,いずれ必ず収束する (解を改善できなくなる).解が収束したら,そ
れまでの最良解をベースにランダムな分散行列のセットを生成し,それを次の初期解とする.
ここで,初期解を最初と同じようにランダムに生成し直す手法を局所探索法 (Local Search)
と呼び,最良解をベースに生成し直す手法を反復局所探索法と呼ぶ.これらの手順を無制限に
4.6 分散行列の探索アルゴリズムとその実装
41
Score
(a) ランダムに
(b) 最良近傍を
(c) 最良近傍を
(d) 最良近傍を
(e) 解が収束し
生成した解を初
期解として近傍
を探索
採択
中心にさらに近
傍を探索
採択
たら最良解を
ベースに生成し
直したものを初
期解とする
図 4.9. 反復局所探索法による解の探索 (Nb = 15)
繰り返すことによってダイバーシティ利得と符号化利得に優れる分散行列を探し出す.
実際の探索では,Nb は 2 ≤ Nb ≤ 65536 の一様乱数として色々な値を使って探索した.
Nb = 65536 の場合であっても,枝刈りによる高速化のおかげで送信アンテナ数 M = 6 程度
までは通常のコンピュータでも問題なく分散行列を探索できた.反復局所探索法による最適化
の様子を図 4.10 に示す.参考のため,局所探索法による最適化の様子もあわせて示す.
0.4
0.3
式
列
行
0.2
小
最
局所探索法
反復局所探索法
0.1
0.0
65536
4653056
9240576
生成した分散行列のセット数
13828096
図 4.10. Non-Coherent GSM(2,2,2,4,2), 2–PAM の分散行列を局所探索法と反復局所探索法
によって探索した結果 (Nb = 65536 なので解が素早く収束している).
図 4.10 から,反復局所探索法による探索プログラムがきちんと動作していることが分かる.
局所探索法でも十分に性能の良い分散行列を求められるが,反復局所探索法の方がより早く優
れた解を見つけられる.こうして,優れた性能を発揮しうる分散行列の探索に成功した.
本論文で用いている GSTSK/Non-Coherent GSM/Single-RF Non-Coherent GSM の分散
行列はすべて反復局所探索法を用いて求めた.論文中のグラフを再現するためにはこの分散行
列が必須であるので,巻末に付録として添付した.
42
第 4 章 提案手法:Non-Coherent GSM
4.7 シミュレーション結果と考察
本節では Non-Coherent GSM の性能をモンテカルロシミュレーションによって評価する.
Non-Coherent GSM はデータレートが 2.0, 3.0 [b/symbol] の場合についてそれぞれの性能を
他の手法と比較する.Single-RF Non-Coheret GSM は,データレートが 1.0 [b/symbol] の
場合について送信アンテナ数 M を大きくしたときの BER の変化を観察する.分散行列は 4.6
節のアルゴリズムで発見したものを使った.
すべての手法が公正に比較できるよう注意した.具体的には,ひとつのグラフの中には同じ
データレートの手法だけを載せるようにした.また,すべての手法において送信エネルギーは
同一の値に統一した.シミュレーションの諸元を表 4.2 に示す.チャネルは狭帯域モデルのレ
イリーフラットフェージングを仮定し,受信機では最適性能が保証されているかわりに演算量
が大きい最尤推定法を用いた.
表 4.2. シミュレーション諸元
送信アンテナ数
M
受信アンテナ数
N
1 ブロックあたりのシンボル時間
T
選択可能な分散行列の数
Q
選択する分散行列の数
P
変調方式
L–PSK, L–PAM
チャネル
レイリーフラットフェージング (狭帯域モデル)
検出器
最尤推定法
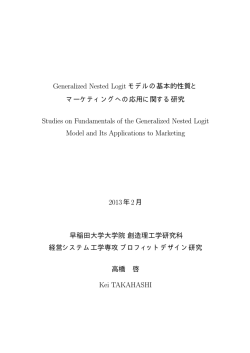
図 4.11 に コ ヒ ー レ ン ト な 手 法 と 非 コ ヒ ー レ ン ト な 手 法 の BER 比 較 結 果 を 示 す .コ
ヒ ー レ ン ト な 手 法 と し て (M, N ) = (2, 2) の BPSK を 用 い た SM と BPSK を 用 い た
GSTSK(2,2,2,4,2) を ,非 コ ヒ ー レ ン ト な 手 法 と し て 2–PAM を 用 い た Non-Coherent
GSM(2,2,2,4,2) と (M, N ) = (1, 1) の差動 QPSK をプロットした.信機や受信機が激しく動
く環境下で正確なチャネルを推定するのは難しいため,コヒーレントな場合についてはチャ
ネル推定の誤差についても考える.チャネル行列に対し CN (0, ω) の複素ガウス分布に従う
推定誤差 (AWGN) を加えて BER を測定した.図 4.11 を観察すると,すべての手法の中で
GSTSK が最も優れているものの,ひとたびチャネル情報に誤差を加えるとエラーフロアが生
じる.SM にも同様の傾向があり,コヒーレントな手法はチャネル情報の誤差に弱いことが分
かる.Non-Coherent GSM ではチャネルを推定する必要がない.このため,チャネル推定が
正確にできない環境下であっても高い性能を発揮することが期待できる.また,非コヒーレン
トな手法ではチャネルを推定するためにパイロット信号を挿入する必要がないので,その挿入
によるデータレート低下の影響も避けられる.図 4.11 において Non-Coherent GSM の BER
を GSTSK と比べると,約 3.5 dB の性能劣化が読み取れる.理論限界値は 3.0 dB なので,
4.7 シミュレーション結果と考察
1 0
10
43
Differential QPSK(1Tx,2Rx)
SM(2,2), BPSK, perfect CSI
SM(2,2), BPSK, ω = 0.1
GSTSK(2,2,2,4,2), BPSK, perfect CSI
GSTSK(2,2,2,4,2), BPSK, ω = 0.1
Non-coherent GSM(2,2,2,4,2), 2-PAM
0 -1
10
0 -2
10
BER
0 -3
10
0 -4
10
10
0 -5
10
0 -6
10
0 -7
0
5
10
15
20
SNR [dB]
25
30
35
図 4.11. 2–PAM を用いた Non-Coherent GSM(2,2,2,4,2), (M, N ) = (1, 1) の差動 QPSK,
(M, N ) = (2, 2) の BPSK を用いた SM, BPSK を用いた GSTSK(2,2,2,4,2) の BER
を比較した結果.コヒーレントな手法に対しては CSI の推定エラーについても考慮し,
チャネル行列に分散 ω = 0.1 の誤差 (AWGN) を加えた場合の BER についても載せ
ている.シミュレーションの最小試行回数は 109 回,データレートは 2.0 [b/symbol]
とした.
今後 0.5 dB 改善できる可能性がある.
図 4.12 にデータレートを高くした場合のコヒーレントな手法と非コヒーレントな手法
の BER 比較結果を示す.コヒーレントな手法として (M, N ) = (2, 2) の QPSK を用いた
SM を,非コヒーレントな手法として 4–PAM を用いた Non-Coherent GSM(2,2,2,4,2) と
(M, N ) = (1, 1) の差動 8–PSK をプロットした.図 4.11 ではデータレートは 2.0 [b/symbol]
であったが,図 4.12 ではすべての手法のデータレートを 3.0 [b/symbol] で統一してある.
図 4.11 の場合と同様に,コヒーレントな符号化手法である SM はチャネル推定に誤差が
あるとエラーフロアが生じてしまう.Non-Coherent GSM はチャネル推定の誤差による性
能低下とは無縁なのでエラーフロアは生じない.SM には送信ダイバーシティがない一方,
Non-Coherent GSM はフルダイバーシティを達成可能なので,コヒーレントな SM を非コ
ヒーレントな Non-Coherent GSM が BER で追い抜く.
図 4.13 にデータレート一定のもとで送信アンテナ数を増やした場合の Single-RF Non-
Coherent GSM の BER のシミュレーション結果を示す.提案手法は柔軟にパラメータを設
定できるので,一定の M に対してデータレート 1.0 [b/symbol] の制約を満たす (Q, P ) が有
限通りある.この図では,複数の (Q, P ) の組み合わせに対して分散行列を用意し,最も優れ
た性能を発揮できた結果のみを載せた.図 4.13 より,送信アンテナ数 M が増えるにしたがっ
て単調にダイバーシティオーダーが改善していることが分かる.これによって,Single-RF
Non-Coherent GSM の高いスケーラビリティが明らかになった.
第 4 章 提案手法:Non-Coherent GSM
1 0
10
Differential 8-PSK(1Tx,2Rx)
SM(2,2), QPSK, perfect CSI
SM(2,2), QPSK, ω = 0.1
Non-coherent GSM(2,2,2,4,2), 4-PAM
0 -1
10
10
0 -2
BER
0 -3
10
0 -4
10
10
0 -5
10
0 -6
10
0 -7
0
5
10
15
20
SNR [dB]
25
30
35
図 4.12. 4–PAM を用いた Non-Coherent GSM(2,2,2,4,2), (M, N ) = (1, 1) の差動 8–PSK,
(M, N ) = (2, 2) の QPSK を用いた SM の BER を比較した結果.図 4.11 の場合と
同様にチャネル推定の誤差を考慮した.シミュレーションの最小試行回数は 109 回,
データレートは 3.0 [b/symbol] とした.
1 0
10
Differential BPSK(1Tx,1Rx)
Single-RF Non-Coherent GSM(2,1,2,2,1), 2-PAM
Single-RF Non-Coherent GSM(3,1,3,5,1), 2-PAM
Single-RF Non-Coherent GSM(4,1,4,14,1), 2-PAM
Single-RF Non-Coherent GSM(7,1,7,6,3), 2-PAM
Single-RF Non-Coherent GSM(10,1,10,8,4), 2-PAM
0 -1
10
0 -2
10
0 -3
10
10
0 -4
BER
44
10
0 -5
0 -6
10
10
0 -7
0 -8
10
10
0 -9
0
10
20
30
40
50
SNR [dB]
図 4.13. Single-RF Non-Coherent GSM で達成可能な BER.参考のため (M, N ) = (1, 1) の
差動 BPSK の結果も載せた.送信アンテナ数 M を M = 2, ..., 10 まで変化させ,ダ
イバーシティ利得を確認する.(Q, P ) は最も良い性能を発揮する場合を探し出し採用
した.シミュレーションの最小試行回数は 1012 回,データレートは 1.0 [b/symbol]
とした.
45
第5章
結論
5.1 まとめ
本研究では GSTSK を差動符号化した手法として Non-Coherent GSM を提案した.また,
その提案手法を大規模 MIMO でも使えるように拡張した.それぞれの手法を数値シミュレー
ションによって評価し,DSTSK / DLDC などの従来方式と比べて高いデータレートを達成
できることを確認した.
GSTSK に代表される符号化方式は,複数の RF 回路を同時に使うことによって SM / SSK
を上回るデータレートを実現する [22, 23].GSTSK の特殊な場合を差動符号化した手法はこ
れまで提案されてきたが,GSTSK をそのまま差動符号化した手法を提案したのは本研究がは
じめてである.提案手法によって,これまで提案されてきた既存の差動符号化手法を包括して
表現できるようになった.そのため,今後既存手法を数学的に解析する場合は本研究の提案手
法だけを解析対象とすればよい.そうして導出された式の中のパラメータを変更することに
よって,既存手法の振る舞いを即座に確認できる.また,既存手法を追試するためにシミュ
レーションを実行するとき,実装するのは提案手法だけでよい.分散行列の探索プログラムな
ども提案手法に適した形で実装すれば,それだけで既存手法の実装も完了したことになる.
加えて,単一の RF 回路で通信可能にもかかわらず,送信アンテナ数の増加によって単調に
性能を改善できる拡張手法として,Single-RF Non-Coherent GSM を提案した.どんな手法
でも受信アンテナ数を増やせば性能は単調に改善するが,送信アンテナ数を増やして性能を改
善するのは難しい.この拡張手法は送信符号を対角行列に制限することによって,送信アン
テナ数および協調ノード数の増加にともなって大きくなる行列演算の計算コストを削減した.
Single-RF Non-Coherent GSM は大規模 MIMO と協調 MIMO への適用を想定している.大
規模 MIMO では通信の品質向上のために多くのアンテナが使われる.送信アンテナ数を増や
すときに RF 回路をひとつで済ませられれば,送信機のコスト増加を抑えられる.また,セル
ラネットワークにおいては,基地局間のパイロット汚染が大規模 MIMO のスケーラビリティ
を台無しにする [46].そのような環境でチャネル推定が潜在的に不要である提案の拡張手法は
有効である.協調 MIMO における VAA では複数のノードが互いに協力しあってデータを伝
送する.コヒーレント検出による手法でノードどうしが協調する場合は,受信機がすべての
46
第 5 章 結論
ノード間のチャネル情報を推定する必要がある.ノード数が増えるとそれだけ推定すべきチャ
ネルの数も増え,いずれ対応できなくなるだろう.そこで,Single-RF Non-Coherent GSM
を VAA に適用し参加ノード数の飛躍的増加に対応する.
数値シミュレーションによって提案手法の高い性能が明らかになった.チャネル推定に誤差
がある場合,コヒーレント検出による手法にはエラーフロアが生じる.提案手法は受信機にお
ける復号処理にチャネル情報を必要としないので,そのようなエラーフロアが生じることはな
い.提案手法は GSTSK と同様にフルダイバーシティを達成する.加えて,大規模 MIMO の
ための拡張手法である Single-RF Non-Coherent GSM は,送信アンテナ数の増加にともなっ
て単調に性能が改善する.非コヒーレント検出では連続する二つの受信ブロックから送信符号
を推定する.考慮する雑音電力は 2 倍になり,コヒーレント検出と比べたときの等価的な受信
S/N 比が半減する.そのため,コヒーレントな手法と比べたとき少なくとも信頼性が 3.0 dB
以上劣化する.提案手法をコヒーレント検出と比べたときの性能劣化は最良の場合約 3.5 dB
となり,理論限界値の 3.0 dB に漸近する結果となった.
5.2 今後の課題
これまでは提案手法の優位点を中心に説明してきたが,研究を進めるにつれて様々な欠点も
明らかになった.また,提案手法に対する情報理論的な解析はほとんどできていない.本節で
それら課題の一部を説明する.
5.2.1 チャネル容量の導出
2 章では各符号化手法の DCMC 容量について詳しい式変形とともに解説したが,3 章では
一切解説していない.この理由として,MIMO のための差動時空間ブロック符号のうち,最
尤検出器を用いる場合の DCMC 容量は導出されていないことが挙げられる.
本研究では誤り訂正について言及しなかったが,実用上はターボ符号などの誤り訂正符号を
組み合わせることが必須である.DCMC 容量の最大化を目標に最適化された分散行列は,誤
り訂正技術と組み合わせたときに優れた性能を発揮する.提案手法を実用化するためには今後
DCMC 容量を導出する必要がある.
5.2.2 分散行列の解析的生成
MIMO のための時空間ブロック符号を解析的に生成する手法としては Golden Code [53, 54]
が最も有名なものの一つである.Golden Code は,送信符号の集合を S として式 (5.1) の最
大化を目標に解析的に生成される.
min det(S1 − S2 )
S1 ,S2 ∈S
(5.1)
GoldenCode は送信アンテナ数 M = 6 まで対応している [54].また,STSK に対して分散行
列を解析的に生成する手法があり,数値探索によって求めた分散行列とほぼ変わらない性能を
5.2 今後の課題
47
達成している [55].
このように,時空間ブロック符号は解析的に生成することができる.本研究では分散行列を
すべて数値探索によって求めたが,その計算コストは大きかった.探索処理のオーダーの下界
は,生成する DM の数を NDM として,Ω(NDM 22B M 3 ) はあるだろう.B が 10 ビットを超
える場合に NDM = 109 個以上の DM を探索すると非常に時間がかかる.今後は分散行列を
解析的に求める手法について考えたい.
5.2.3 高レートにおける性能劣化の改善
提案手法は高いデータレートの場合に性能が低下する現象が見られる.ここでの性能低下
とは,GSTSK と比べたときの性能損失のことを指す.3 章で説明したように,差動符号化手
法は二つの連続するブロックを対象に復号を行うため,コヒーレント検出による手法の場合
と比べて 2 倍ノイズの影響を受ける.そのため,差動符号化と非コヒーレント検出に頼った
手法は必ずコヒーレント検出による手法と比べて 3 dB 以上の性能劣化が生じる.4 章では
Non-Coherent GSM は最良の場合に 3.5 dB の劣化で済むことを説明した.ここで,高レー
トの場合のシミュレーション結果を図 5.1 に示す.
10
1 0
10
0 -1
BER
10
0 -2
10
0 -3
10
0 -4
10
0 -5
10
0 -6
0
GSTSK(2,2,2,3,3), 16-QAM
Non-Coherent GSM(2,2,2,9,3), 4-PAM
10
20
SNR [dB]
30
40
図 5.1. データレート 6.0 [b/symbol] の場合のコヒーレントな GSTSK と非コヒーレントな
Non-Coherent GSM の性能比較.(Q, P ) は最も良い性能を発揮する場合を探し出し採
用した.最小試行回数は 108 回とした.
図 5.1 から分かるとおり,Non-Coherent GSM はコヒーレントの場合と比べて 15dB 以上
の性能損失が生じてしまっている.GSTSK はスペクトル効率に優れる QAM 変調を利用可能
な一方,Non-Coherent GSM は PAM 変調しか使えないので,高いデータレートの場合にこ
のような著しい性能損失が生じて使い物にならなくなってしまう.
通常の差動符号化手法は次式のように送信符号のユニタリ性を活かして符号を差動符号化
48
第 5 章 結論
し,送信符号のノルムを一定に保つ.
X(i)X(i)H = IM
S(i) = S(i − 1)X(i)
送信符号がユニタリでないと,差動符号化を繰り返すうちに送信符号のノルムは 0 に収束する
か無限大に発散するかのどちらかになってしまう.
データレートを上げるためには,QAM などスペクトル効率に優れたシンボルを符号に埋め
込む必要がある.しかし,QAM シンボルは大きさが一定でないため,それを埋め込んだ符
号はユニタリ行列でなくなってしまう.そこで,差動符号化するときに行列のノルムを変化
させる正規化係数を掛け合わせることによって,ユニタリ行列でなくてもそれと同様の効果
を得られる手法が提案されている [37, 38].具体的には次式のように,差動符号化するときに
∥X(i)∥2F で割ることによって送信符号 S(i) のノルムを一定に保つ.
X(i)X(i)H = βi2 IM
S(i − 1)
S(i) =
X(i)
βi−1
また,正規化係数を掛け合わせて送信された符号をより正確に推定するための検出器も提案
されている [56].今後はこれらの手法のように,ケーリー変換を用いない非ユニタリな差動符
号化手法が主要な研究対象になるだろう.
5.2.4 単一 RF 制約による性能劣化の改善
Single-RF Non-Coherent GSM の送信符号はすべて対角行列の形に落とし込んだ.対角行
列の形にしたことで単一の RF 回路によるシンボル送信が実現したが,これは同時に性能の劣
化をもたらす.例えば Single-RF Non-Coherent GSM(2, N, 2, 2, 1), 2–PAM の場合の送信符
号は次のとおりである.
[
X1 =
[
X3 =
e0.25πj
0.00
e−0.25πj
0.00
0.00
]
e0.75πj
0.00
e−0.75πj
[
e0.75πj
0.00
0.00
]
, X2 =
,
e0.25πj
]
[ −0.75πj
]
e
0.00
, X4 =
.
0.00
e−0.25πj
すべての送信符号を対角に落とし込んだことで,符号間の距離が明らかに小さくなってい
る.さらなる性能の改善ために,送信符号がユニタリ行列でありながら,一つの列に非ゼロの
要素が一つだけあるような符号化手法が求められる.
5.2.5 さらなる送信アンテナ数の増加への対応
送信符号がユニタリである限り,Non-Coherent GSM のパラメータ設定には M = T の制
約が課される.この制約は送信アンテナ数 M が増えるほどブロック長 T が伸びることを意味
し,ひとつの符号にひとつのシンボルを埋め込む現在の符号化方式ではデータレートに限界が
5.2 今後の課題
49
生じることが分かる.SM は T = 1 なので,M が増えればその分 RSM = log2 M L と対数的
にデータレートを増やすことができた.今後 Non-Coherent GSM にも,データレートを飛躍
的に増やすことができるような手法を組み込む必要がある.
50
参考文献
[1] Cisco. (2013, Feb) Cisco visual networking index: Global mobile data traffic forecast
update, 2012―2017. [Online]. Available: http://www.cisco.com/en/US/solutions/
collateral/ns341/ns525/ns537/ns705/ns827/white paper c11-520862.pdf
[2] 総務省情報通信審議会. (2007, Jun) 電波有効利用方策委員会報告書 概要. [Online].
Available: http://www.soumu.go.jp/main sosiki/joho tsusin/policyreports/chousa/
mobile media/pdf/070802 2 si5.pdf
[3] The Japan Organizing Committee of ITS. (2013, Oct) ITS world congress TOKYO
2013. [Online]. Available: http://www.itsworldcongress.jp/
[4] C. Han, T. Harrold, S. Armour, I. Krikidis, S. Videv, P. M. Grant, H. Haas, J. S.
Thompson, I. Ku, C.-X. Wang et al., “Green radio: radio techniques to enable energyefficient wireless networks,” IEEE Communications Magazine, vol. 49, no. 6, pp.
46–54, 2011.
[5] F. Rusek, D. Persson, B. K. Lau, E. G. Larsson, T. L. Marzetta, O. Edfors, and
F. Tufvesson, “Scaling up MIMO: Opportunities and challenges with very large arrays,” IEEE Signal Processing Magazine, vol. 30, no. 1, pp. 40–60, 2013.
[6] E. G. Larsson, F. Tufvesson, O. Edfors, and T. L. Marzetta, “Massive MIMO for next
generation wireless systems,” IEEE Communications Magazine, 2013, early access.
[7] T. Cover and A. E. Gamal, “Capacity theorems for the relay channel,” IEEE Transactions on Information Theory, vol. 25, no. 5, pp. 572–584, 1979.
[8] F. Gomez-Cuba, R. Asorey-Cacheda, and F. J. Gonzalez-Castano, “A survey on cooperative diversity for wireless networks,” IEEE Communications Surveys & Tutorials,
vol. 14, no. 3, pp. 822–835, 2012.
[9] C. E. Shannon, “A mathematical theory of communication,” Bell System Technical
Journal, vol. 27, pp. 379–423, 623–656, 1948.
[10] C. Berrou, A. Glavieux, and P. Thitimajshima, “Near Shannon limit error-correcting
coding and decoding: Turbo-codes,” in IEEE International Conference on Communications (ICC 93), vol. 2.
IEEE, 1993, pp. 1064–1070.
[11] N. Wiberg, H.-A. Loeliger, and R. Kotter, “Codes and iterative decoding on general
graphs,” European Transactions on telecommunications, vol. 6, no. 5, pp. 513–525,
51
1995.
[12] D. J. MacKay and R. M. Neal, “Near Shannon limit performance of low density
parity check codes,” Electronics letters, vol. 32, no. 18, p. 1645, 1996.
[13] G. Foschini, “Layered space-time architecture for wireless communication in a fading
environment when using multi-element antennas,” Bell Labs Technical Journal, vol. 1,
no. 2, pp. 41–59, 1996.
[14] G. Foschini and M. Gans, “On limits of wireless communications in a fading environment when using multiple antennas,” Wireless personal communications, vol. 6,
no. 3, pp. 311–335, 1998.
[15] E. Telatar, “Capacity of multi-antenna Gaussian channels,” European Transactions
on Telecommunications, vol. 10, no. 6, pp. 585–595, 1999.
[16] S. Sugiura, S. Chen, and L. Hanzo, “A universal space-time architecture for multipleantenna aided systems,” IEEE Communications Surveys & Tutorials, vol. 14, no. 2,
pp. 401–420, 2012.
[17] Q. H. Spencer, C. B. Peel, A. L. Swindlehurst, and M. Haardt, “An introduction to
the multi-user MIMO downlink,” IEEE Communications Magazine, vol. 42, no. 10,
pp. 60–67, 2004.
[18] R. Y. Mesleh, H. Haas, S. Sinanovic, C. Ahn, and S. Yun, “Spatial modulation,”
IEEE Transactions on Vehicular Technology, vol. 57, no. 4, pp. 2228–2242, 2008.
[19] J. Jeganathan, A. Ghrayeb, L. Szczecinski, and A. Ceron, “Space shift keying modulation for MIMO channels,” IEEE Transactions on Wireless Communications, vol. 8,
no. 7, pp. 3692–3703, 2009.
[20] M. Di Renzo, H. Haas, A. Ghrayeb, S. Sugiura, and L. Hanzo, “Spatial modulation
for generalized MIMO: Challenges, opportunities, and implementation,” Proceedings
of the IEEE, vol. 102, no. 1, pp. 56–103, 2014.
[21] S. Sugiura, S. Chen, and L. Hanzo, “Coherent and differential space-time shift keying:
A dispersion matrix approach,” IEEE Transactions on Communications, vol. 58,
no. 11, pp. 3219–3230, nov 2010.
[22] J. Jeganathan, A. Ghrayeb, and L. Szczecinski, “Generalized space shift keying modulation for MIMO channels,” in IEEE 19th International Symposium on Personal,
Indoor and Mobile Radio Communications (PIMRC 2008), Cannes, France, 15–18
September 2008, pp. 1–5.
[23] S. Sugiura, S. Chen, and L. Hanzo, “Generalized space-time shift keying designed
for flexible diversity-, multiplexing- and complexity-tradeoffs,” IEEE Transactions
on Wireless Communications, vol. 10, no. 4, pp. 1144–1153, Apr. 2011.
[24] S. Alamouti, “A simple transmit diversity technique for wireless communications,”
IEEE Journal on Selected Areas in Communications, vol. 16, no. 8, pp. 1451–1458,
1998.
52
参考文献
[25] V. Tarokh, H. Jafarkhani, and A. Calderbank, “Space-time block codes from orthogonal designs,” IEEE Transactions on Information Theory, vol. 45, no. 5, pp.
1456–1467, 1999.
[26] ——, “Space-time block coding for wireless communications: performance results,”
IEEE Journal on selected areas in communications, vol. 17, no. 3, pp. 451–460, 1999.
[27] L. Zheng and D. Tse, “Diversity and multiplexing: A fundamental tradeoff in
multiple-antenna channels,” IEEE Transactions on Information Theory, vol. 49,
no. 5, pp. 1073–1096, 2003.
[28] R. Y. Mesleh, H. Haas, C. Ahn, and S. Yun, “Spatial modulation – a new low
complexity spectral efficiency enhancing technique,” First International Conference
on Communications and Networking (CHINACOM), pp. 1–5, Oct. 2006.
[29] J. Jeganathan, A. Ghrayeb, and L. Szczecinski, “Spatial modulation: optimal detection and performance analysis,” IEEE Communications Letters, vol. 12, no. 8, pp.
545–547, 2008.
[30] P. Wolniansky, G. Foschini, G. Golden, and R. Valenzuela, “V-BLAST: An architecture for realizing very high data rates over the rich-scattering wireless channel,”
Proceedings of the International Symposium on Signals, Systems, and Electronics
(ISSSE’98), pp. 295–300, 1998.
[31] L. Hanzo, O. Alamri, M. El-Hajjar, and N. Wu, Near-Capacity Multi-Functional
MIMO Systems: Sphere-Packing, Iterative Detection and Cooperation.
John Wiley
and IEEE Press, 2009.
[32] V. Tarokh, N. Seshadri, and A. Calderbank, “Space-time codes for high data rate
wireless communication: Performance criterion and code construction,” IEEE Transactions on Information Theory, vol. 44, no. 2, pp. 744–765, 1998.
[33] R. Heath Jr and A. Paulraj, “Linear dispersion codes for MIMO systems based on
frame theory,” IEEE Transactions on Signal Processing, vol. 50, no. 10, pp. 2429–
2441, 2002.
[34] S. X. Ng and L. Hanzo, “On the MIMO channel capacity of multidimensional signal
sets,” IEEE Transactions on Vehicular Technology, vol. 55, no. 2, pp. 528–536, 2006.
[35] L. Hanzo, T. Liew, B. Yeap, R. Y. S. Tee, and S. X. Ng, Turbo Coding, Turbo
Equalisation, and Space-Time Coding for Transmission over Fading Channels. John
Wiley and IEEE Press, 2011.
[36] Y. Zhu and H. Jafarkhani, “Differential modulation based on quasi-orthogonal codes,”
IEEE Transactions on Wireless Communications, vol. 4, no. 6, pp. 3005–3017, 2005.
[37] G. Bauch and A. Mengi, “Non-unitary extensions of differential matrix modulation,”
in Europeant Siguild Processing Conference (EUSIPCO), 2005.
[38] S. Sugiura, C. Xu, S. X. Ng, and L. Hanzo, “Reduced-complexity coherent versus
non-coherent QAM-aided space-time shift keying,” IEEE Transactions on Commu-
53
nications, vol. 59, no. 11, pp. 3090–3101, Nov. 2011.
[39] C. S. Hwang, S. H. Nam, J. Chung, and V. Tarokh, “Differential space time block
codes using nonconstant modulus constellations,” IEEE Transactions on Signal Processing, vol. 51, no. 11, pp. 2955–2964, 2005.
[40] B. Hassibi and B. Hochwald, “High-rate codes that are linear in space and time,”
IEEE Transactions on Information Theory, vol. 48, no. 7, pp. 1804–1824, 2002.
[41] ——, “Cayley differential unitary space-time codes,” IEEE Transactions on Information Theory, vol. 48, no. 6, pp. 1485–1503, 2002.
[42] M.-A. Bouzigues, I. Siaud, M. H´elard, and A.-M. Ulmer-Moll, “Turn back the clock:
Time reversal for green radio communications,” IEEE Vehicular Technology Magazine, vol. 8, no. 1, pp. 49–56, 2012.
[43] L. Atzori, A. Iera, and G. Morabito, “The internet of things: A survey,” Computer
Networks, vol. 54, no. 15, pp. 2787 – 2805, 2010.
[44] E. Perahia and M. X. Gong, “Gigabit wireless LANs: an overview of IEEE 802.11 ac
and 802.11 ad,” ACM SIGMOBILE Mobile Computing and Communications Review,
vol. 15, no. 3, pp. 23–33, 2011.
[45] A. Ghosh, R. Ratasuk, B. Mondal, N. Mangalvedhe, and T. Thomas, “LTE-advanced:
next-generation wireless broadband technology,” IEEE Wireless Communications,
vol. 17, no. 3, pp. 10–22, 2010.
[46] T. L. Marzetta, “Noncooperative cellular wireless with unlimited numbers of base
station antennas,” IEEE Transactions on Wireless Communications, vol. 9, no. 11,
pp. 3590–3600, 2010.
[47] A. Goldsmith, Wireless communications. Cambridge University Press, 2005.
[48] H. Kawakami and T. Ohira, “Electrically steerable passive array radiator (ESPAR)
antennas,” IEEE Antennas and Propagation Magazine, vol. 47, no. 2, pp. 43–50,
2005.
[49] M. Dohler, E. Lefranc, and H. Aghvami, “Space-time block codes for virtual antenna
arrays,” The 13th IEEE International Symposium on Personal, Indoor and Mobile
Radio Communications, 2002., vol. 1, pp. 414–417, 2002.
[50] D. Lopez-Perez, I. Guvenc, G. De La Roche, M. Kountouris, T. Q. Quek, and
J. Zhang, “Enhanced intercell interference coordination challenges in heterogeneous
networks,” IEEE Wireless Communications Magazine, vol. 18, no. 3, pp. 22–30, 2011.
[51] L. Al-Kanj, Z. Dawy, and E. Yaacoub, “Energy-aware cooperative content distribution over wireless networks: Design alternatives and implementation aspects,” IEEE
Communications Surveys & Tutorials, vol. 15, no. 4, pp. 1736–1760, 2013.
[52] H. R. Louren¸co, O. C. Martin, and T. St¨
utzle, “Iterated local search,” International
series in operations research and management science, pp. 321–354, 2003.
[53] J.-C. Belfiore, G. Rekaya, and E. Viterbo, “The golden code: a 2×2 full-rate space-
54
参考文献
time code with nonvanishing determinants,” IEEE Transactions on Information Theory, vol. 51, no. 4, pp. 1432–1436, 2005.
[54] F. Oggier, J.-C. Belfiore, and E. Viterbo, Cyclic division algebras: a tool for space
time coding.
Now Publishers Inc, 2007, vol. 1.
[55] R. Rajashekar, K. V. S. Hari, and L. Hanzo, “Structured dispersion matrices from
space-time block codes for space-time shift keying,” IEEE Signal Processing Letters,
vol. 20, no. 4, pp. 371–374, Apr 2013.
[56] M. Bhatnagar, A. Hjorungnes, and L. Song, “Differential coding for non-orthogonal
space-time block codes with non-unitary constellations over arbitrarily correlated
rayleigh channels,” IEEE Transactions on Wireless Communications, vol. 8, no. 8,
pp. 3985–3995, 2009.
55
謝辞
(気恥ずかしいのでオンライン版では非公開とします)
この場を借りて,卒業研究を支えてくださった皆様に深くお礼申し上げます.
ありがとうございました.
56
投稿論文一覧
国際論文誌
1. Naoki Ishikawa and Shinya Sugiura, “Unified Differential Spatial Modulation”,
IEEE Wireless Communications Letters, submitted
国際会議 (査読あり口頭発表)
1. Naoki Ishikawa and Shinya Sugiura, “Single- and Multiple-RF Aided Non-Coherent
Generalized Spatial Modulation”, IEEE 79th Vehicular Technology Conference
(VTC2014-Spring), accepted for publication
国内会議 (査読なし口頭発表)
1. Naoki Ishikawa and Shinya Sugiura, “Differentially-Encoded Spatial Modulation
MIMO Systems”, 電子情報通信学会 信号処理専門委員会 第 28 回信号処理シンポジウ
ム, pp. 597-598, 2013 年 11 月.
57
58
用語集
用語集
AWGN
Additive White Gaussian Noise
加法性白色ガウス雑音
BER
Bit Error Rate
ビット誤り率
BPSK
Binary Phase-Shift Keying
二位相偏移変調
CCMC
Continuous-input Continuous-output Memoryless Cahnnel
CIR
Channel Impulse Response
チャネルインパルス応答,遅延プロファイル
DCMC
Discrete-input Continuous-output Memoryless Channel
DLDC
Differential Linear Dispersion Code
差動線形分散符号
DM
Dispersion Matrix
分散行列
DMT
Diversity and Multiplexing Tradeoff
DOSTBC
Differential Orthogonal Space-Time Block Code
差動直交時空間ブロック符号
DSTSK
Differential Space-Time Shift Keying
差動時空間偏位変調
ETC
Electronic Toll Collection system
電子料金収受システム
ESPAR
Electrically Steerable Passive Array Radiator
FDD
Frequency Division Duplex
周波数分割複信
GSM
Generalized Spatial Modulation
一般空間変調
GSSK
Generalized Space Shift Keying
一般空間偏位変調
GSTSK
Generalized Space-Time Shift Keying
一般時空間偏位変調
59
HetNet
Heterogeneous Network
異種混合ネットワーク
IAS
Inter-Antenna Synchronization
アンテナ間同期
ICI
Inter-Channel Interference
チャネル間干渉
IEEE
the Institute of Electrical and Electronics Engineers
米国電気電子学会
i.i.d.
independent and identically distributed
独立同一分布
ILS
Iterated Local Search
反復局所探索
IoT
Internet of Things
モノのインターネット
ITS
Intelligent Transport Systems
高度道路交通システム
LDC
Linear Dispersion Code
線形分散符号
LDPC
Low-Density Parity-Check
低密度パリティ検査
LOS
Line Of Sight
見通し内経路
LS
Local Search
局所探索
LTE-A
Long Term Evolution Advanced
MAP
Maximum A Posteriori
最大事後確率
MIMO
Multiple-Input Multiple-Output
MLD
Maximum Likelihood Detection
最尤検出
MU-MIMO
Multi-User Multiple-Input Multiple-Output
OFDM
Orthogonal Frequency-Division Multiplexing
直交周波数分割多重
OSTBC
Orthogonal Space-Time Block Code
直交時空間ブロック符号
PAM
Pulse-Amplitude Modulation
パルス振幅変調
PEP
Pairwise-Error Probability
60
用語集
PSK
Phase-Shift Keying
位相偏移変調
QAM
Quadrature Amplitude Modulation
直角位相振幅変調
QPSK
Quaternary Phase-Shift Keying
四位相偏移変調
QOSTBC
Quasi Orthogonal Space-Time Block Code
準直交時空間ブロック符号
RF
Radio Frequency
無線周波数
RDC
Rank- and Determinant- Criterion
SDM
Space Division Multiplexing
空間分割多重
SER
Symbol Error Rate
シンボル誤り率
SIC
Symbol Interference Canceller
シンボル干渉キャンセラ
SISO
Single-Input Single-Output
SM
Spatial Modulation
空間変調
SNR
Signal-to-Noise Ratio
信号対雑音比
SSK
Space Shift Keying
空間偏移変調
STBC
Space-Time Block Code
時空間ブロック符号
STC
Space-Time Code
時空間符号
STSK
Space-Time Shift Keying
時空間偏位変調
STTC
Space-Time Trellis Code
時空間トレリス符号
TDD
Time Division Duplex
時分割複信
TR
Time Reversal
時間逆行
TRBF
Time-Reversal Beam Forming
UHF
Ultra High Frequency
極超短波
61
ULA
Uniform Linear Array
UWB
Ultra-WideBand
超広帯域
VAA
Virtual Antenna Array
仮想アンテナアレイ
V-BLAST
Vertical Bell Laboratories Layered Space-Time
VHF
Very High Frequency
超短波
VICS
Vehicle Information and Communication System
道路交通情報通信システム
62
付録 A
分散行列
本論文ではシミュレーションによって GSTSK [23] および 4 章で提案した Non-Coherent
GSM / Single-RF Non-Coherent GSM の性能を評価した.それぞれの手法を使うためには
分散行列 Aq (1 ≤ q ≤ Q) が必須である.シミュレーション結果を第三者が再現できるよう
に,以降に論文中で用いたすべての分散行列を掲載する.ただし,これらは著者が実装した数
値探索プログラムによって求めたものであり,最適解である保証はない.分散行列はパラメー
タ M, T, Q, P と変調方式に依存する.分散行列の探索において,目的関数は RDC の最小行
列式とした (詳しくは 2.3 節へ).また,探索アルゴリズムは反復局所探索法を用いた (詳しく
は 4.6 節へ).
A.1 GSTSK
GSTSK(2, N, 2, 2, 1), BPSK
[
0.59 exp(−j0.74π)
A1 =
0.79 exp(+j0.16π)
[
0.80 exp(−j0.81π)
A2 =
0.62 exp(−j0.77π)
GSTSK(2, N, 2, 4, 1), BPSK
[
0.69 exp(−j0.62π)
A1 =
0.72 exp(+j0.64π)
[
0.67 exp(+j0.35π)
A2 =
0.76 exp(+j0.79π)
[
0.94 exp(+j0.91π)
A3 =
0.30 exp(−j0.80π)
[
0.42 exp(−j0.32π)
A4 =
0.90 exp(−j0.76π)
0.82 exp(+j0.44π)
0.59 exp(+j0.16π)
0.57 exp(−j0.53π)
0.80 exp(+j0.19π)
0.72 exp(−j0.71π)
0.69 exp(−j0.50π)
0.73 exp(−j0.91π)
0.66 exp(+j0.54π)
0.34 exp(+j0.77π)
0.95 exp(+j0.01π)
0.92 exp(+j0.69π)
0.43 exp(−j0.73π)
]
,
]
.
]
,
]
,
]
,
]
.
A.1 GSTSK
GSTSK(2, N, 2, 4, 2), BPSK
[
0.53 exp(+j0.77π)
A1 =
0.43 exp(−j0.31π)
[
0.44 exp(−j0.03π)
A2 =
0.55 exp(−j0.35π)
[
0.62 exp(+j0.42π)
A3 =
0.36 exp(−j0.99π)
[
0.40 exp(+j0.08π)
A4 =
0.59 exp(+j0.38π)
GSTSK(2, N, 2, 4, 3), BPSK
[
0.47 exp(+j0.51π)
A1 =
0.33 exp(+j0.27π)
[
0.24 exp(+j0.51π)
A2 =
0.52 exp(+j0.98π)
[
0.43 exp(+j0.17π)
A3 =
0.39 exp(−j0.43π)
[
0.43 exp(+j0.87π)
A4 =
0.38 exp(−j0.43π)
GSTSK(2, N, 2, 4, 4), BPSK
[
0.15 exp(+j0.68π)
A1 =
0.48 exp(−j0.48π)
[
0.48 exp(+j0.35π)
A2 =
0.15 exp(−j0.05π)
[
0.24 exp(+j0.52π)
A3 =
0.40 exp(+j0.92π)
[
0.39 exp(+j0.75π)
A4 =
0.31 exp(+j0.20π)
GSTSK(2, N, 2, 16, 1), QPSK
[
0.65 exp(−j0.41π)
A1 =
0.75 exp(−j0.79π)
[
0.72 exp(−j0.23π)
A2 =
0.49 exp(−j0.43π)
[
0.48 exp(−j0.36π)
A3 =
0.99 exp(+j0.90π)
[
0.70 exp(−j0.53π)
A4 =
0.68 exp(−j0.57π)
[
0.13 exp(−j0.81π)
A5 =
0.42 exp(−j0.09π)
0.43 exp(−j0.45π)
0.60 exp(−j0.48π)
0.55 exp(−j0.22π)
0.46 exp(+j0.36π)
0.34 exp(+j0.40π)
0.61 exp(−j0.03π)
0.59 exp(−j0.83π)
0.39 exp(+j0.27π)
0.33 exp(+j0.84π)
0.47 exp(−j0.42π)
0.53 exp(+j0.10π)
0.24 exp(−j0.43π)
0.38 exp(−j0.43π)
0.43 exp(−j0.02π)
0.37 exp(−j0.44π)
0.44 exp(−j0.79π)
0.48 exp(+j0.12π)
0.15 exp(−j0.30π)
0.15 exp(−j0.40π)
0.48 exp(+j0.20π)
0.44 exp(+j0.65π)
0.31 exp(+j0.05π)
0.31 exp(−j0.76π)
0.39 exp(−j0.31π)
0.92 exp(−j0.48π)
0.41 exp(−j0.05π)
0.24 exp(−j0.15π)
1.09 exp(−j0.74π)
0.35 exp(−j0.18π)
0.82 exp(+j0.01π)
0.99 exp(−j0.91π)
0.26 exp(−j0.19π)
0.71 exp(+j0.46π)
1.14 exp(+j0.62π)
]
,
]
,
]
,
]
.
]
,
]
,
]
,
]
.
]
,
]
,
]
,
]
.
]
,
]
,
]
,
]
,
]
,
63
64
付録 A
分散行列
[
A6 =
[
A7 =
[
A8 =
[
A9 =
[
A10 =
[
A11 =
[
A12 =
[
A13 =
[
A14 =
[
A15 =
[
A16 =
0.79 exp(−j0.99π) 0.49 exp(−j0.90π)
0.72 exp(−j0.47π) 0.79 exp(−j0.69π)
0.95 exp(−j0.83π) 0.50 exp(+j0.24π)
0.82 exp(−j0.33π) 0.41 exp(+j0.21π)
1.03 exp(+j0.47π) 0.36 exp(−j0.50π)
0.12 exp(+j0.06π) 0.89 exp(−j0.04π)
0.83 exp(+j0.22π)
0.37 exp(−j0.38π)
0.86 exp(+j0.57π)
0.65 exp(+j0.45π)
0.91 exp(−j0.26π) 0.90 exp(−j0.76π)
0.29 exp(+j0.35π) 0.52 exp(+j0.79π)
0.70 exp(−j0.22π) 0.64 exp(−j0.32π)
0.66 exp(+j0.59π) 0.81 exp(−j0.95π)
0.39 exp(−j0.23π) 0.29 exp(+j0.43π)
1.32 exp(+j0.61π) 0.16 exp(−j0.25π)
0.43 exp(+j0.47π) 0.66 exp(−j0.20π)
0.93 exp(+j0.77π) 0.72 exp(+j0.76π)
1.04 exp(−j0.09π) 0.71 exp(+j0.12π)
0.39 exp(+j0.94π) 0.51 exp(+j0.98π)
0.98 exp(+j0.13π) 0.24 exp(+j0.38π)
0.64 exp(+j0.34π) 0.76 exp(−j0.68π)
0.70 exp(+j0.10π) 0.81 exp(+j0.78π)
0.55 exp(−j0.91π) 0.74 exp(+j0.15π)
GSTSK(3, N, 3, 3, 3), 4–QAM
0.38 exp(+j0.17π)
A1 = 0.56 exp(+j0.94π)
0.37 exp(−j0.83π)
0.38 exp(−j0.58π)
A2 = 0.36 exp(+j0.72π)
0.05 exp(−j0.62π)
0.44 exp(−j0.33π)
A3 = 0.24 exp(+j0.24π)
0.33 exp(−j0.12π)
]
,
]
,
]
,
]
,
]
,
]
,
]
,
]
,
]
,
]
,
]
.
0.24 exp(+j0.48π) 0.23 exp(+j0.35π)
0.08 exp(+j0.44π) 0.33 exp(+j0.35π) ,
0.28 exp(−j0.91π) 0.31 exp(+j0.17π)
0.47 exp(−j0.82π) 0.09 exp(+j0.02π)
0.31 exp(−j0.66π) 0.40 exp(−j0.73π) ,
0.32 exp(+j0.40π) 0.37 exp(+j0.96π)
0.11 exp(+j0.91π) 0.37 exp(−j0.64π)
0.41 exp(+j0.10π) 0.26 exp(−j0.77π) .
0.47 exp(+j0.84π) 0.18 exp(−j0.02π)
GSTSK(4, N, 4, 16, 1), 16–PSK
0.44 exp(+j0.75π)
0.09 exp(−j0.70π)
A1 =
0.82 exp(−j0.26π)
0.10 exp(−j0.31π)
0.62 exp(−j0.37π)
0.59 exp(−j0.97π)
A2 =
0.60 exp(−j0.66π)
0.16 exp(−j0.36π)
0.42 exp(−j0.57π)
0.36 exp(+j0.47π)
A3 =
0.68 exp(−j0.43π)
0.52 exp(−j0.23π)
0.59 exp(−j0.85π)
0.58 exp(+j0.49π)
0.46 exp(−j0.85π)
0.55 exp(+j0.17π)
0.26 exp(−j0.03π)
0.84 exp(+j0.69π)
0.29 exp(+j0.28π)
0.55 exp(−j0.54π)
0.17 exp(−j0.72π)
0.45 exp(+j0.78π)
0.72 exp(+j0.04π)
0.46 exp(−j0.32π)
0.66 exp(−j0.55π)
0.44 exp(+j0.04π)
0.46 exp(+j0.16π)
0.42 exp(+j0.83π)
0.38 exp(−j0.58π)
0.44 exp(−j0.27π)
0.48 exp(−j0.30π)
0.69 exp(+j0.83π)
0.71 exp(−j0.15π)
0.19 exp(−j0.11π)
0.38 exp(−j0.88π)
0.24 exp(+j0.11π)
0.61 exp(+j0.93π)
0.26 exp(−j0.85π)
,
0.25 exp(+j0.91π)
0.52 exp(+j0.94π)
0.26 exp(+j0.26π)
0.51 exp(+j0.64π)
,
0.24 exp(+j0.10π)
0.71 exp(+j0.44π)
0.23 exp(−j0.97π)
0.83 exp(+j0.03π)
,
0.27 exp(+j0.44π)
0.61 exp(+j0.07π)
A.1 GSTSK
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
A14
A15
A16
0.56 exp(−j0.24π)
0.52 exp(−j0.60π)
=
0.30 exp(−j0.99π)
0.33 exp(−j0.88π)
0.56 exp(−j0.08π)
0.35 exp(−j0.48π)
=
0.42 exp(−j0.71π)
0.58 exp(+j0.79π)
0.31 exp(−j0.73π)
0.51 exp(+j0.63π)
=
0.25 exp(+j0.58π)
0.75 exp(+j0.26π)
0.24 exp(+j0.48π)
0.35 exp(+j0.92π)
=
0.72 exp(−j0.09π)
0.49 exp(−j0.42π)
0.54 exp(−j0.60π)
0.78 exp(+j0.28π)
=
0.26 exp(−j0.77π)
0.17 exp(−j0.81π)
0.63 exp(−j0.72π)
0.40 exp(+j0.77π)
=
0.63 exp(−j0.71π)
0.28 exp(−j0.03π)
0.27 exp(−j0.67π)
0.65 exp(−j0.96π)
=
0.73 exp(+j0.89π)
0.25 exp(−j0.13π)
0.31 exp(+j0.89π)
0.38 exp(−j0.96π)
=
0.33 exp(+j0.93π)
0.88 exp(−j0.83π)
0.69 exp(+j0.33π)
0.59 exp(+j0.10π)
=
0.26 exp(+j0.14π)
0.10 exp(+j0.25π)
0.80 exp(+j0.45π)
0.48 exp(−j0.36π)
=
0.26 exp(+j0.08π)
0.26 exp(+j0.37π)
0.31 exp(+j0.21π)
0.56 exp(+j0.20π)
=
0.54 exp(+j0.81π)
0.50 exp(+j0.65π)
0.75 exp(+j0.19π)
0.48 exp(+j0.43π)
=
0.49 exp(−j0.23π)
0.42 exp(−j0.28π)
0.40 exp(+j0.98π)
0.31 exp(−j0.06π)
=
0.15 exp(−j0.07π)
0.73 exp(+j0.89π)
0.33 exp(−j0.28π)
0.76 exp(+j0.18π)
0.40 exp(+j0.55π)
0.70 exp(+j0.85π)
0.55 exp(+j0.82π)
0.33 exp(−j0.31π)
0.61 exp(−j0.89π)
0.38 exp(+j0.95π)
0.14 exp(−j0.33π)
0.79 exp(+j0.67π)
0.35 exp(−j0.45π)
0.26 exp(+j0.74π)
0.61 exp(+j0.63π)
0.25 exp(−j0.84π)
0.45 exp(+j0.85π)
0.65 exp(+j0.82π)
0.55 exp(−j0.61π)
0.56 exp(+j0.40π)
0.15 exp(−j0.15π)
0.50 exp(−j0.83π)
0.65 exp(−j0.35π)
0.34 exp(−j0.29π)
0.59 exp(−j0.56π)
0.43 exp(+j0.16π)
0.98 exp(−j0.61π)
0.25 exp(−j0.59π)
0.38 exp(−j0.64π)
0.32 exp(−j0.53π)
0.27 exp(+j0.38π)
0.37 exp(−j0.99π)
0.46 exp(−j0.67π)
0.64 exp(+j0.14π)
0.16 exp(+j0.63π)
0.33 exp(+j0.30π)
0.52 exp(−j0.01π)
0.78 exp(+j0.61π)
0.73 exp(+j0.76π)
0.11 exp(+j0.98π)
0.64 exp(−j0.47π)
0.21 exp(+j0.94π)
0.22 exp(−j0.81π)
0.11 exp(+j0.75π)
0.49 exp(+j0.69π)
0.73 exp(+j0.52π)
0.50 exp(−j0.96π)
0.07 exp(+j0.15π)
0.76 exp(+j0.03π)
0.46 exp(−j0.99π)
0.45 exp(−j0.09π)
0.45 exp(−j0.84π)
0.38 exp(+j0.13π)
0.64 exp(−j0.02π)
0.77 exp(+j0.92π)
0.12 exp(−j0.75π)
0.42 exp(−j0.19π)
0.44 exp(+j0.04π)
0.70 exp(+j0.86π)
0.43 exp(+j0.35π)
0.51 exp(−j0.38π)
0.01 exp(−j0.73π)
0.64 exp(+j0.46π)
0.62 exp(−j0.55π)
0.53 exp(+j0.05π)
0.16 exp(+j0.87π)
0.42 exp(−j0.04π)
0.74 exp(+j0.66π)
0.46 exp(−j0.68π)
0.41 exp(−j0.44π)
0.36 exp(−j0.24π)
0.35 exp(+j0.60π)
0.30 exp(−j0.07π)
0.75 exp(+j0.67π)
0.32 exp(−j0.95π)
0.57 exp(−j0.45π)
0.49 exp(−j0.58π)
0.48 exp(−j0.54π)
0.61 exp(+j0.59π)
0.30 exp(+j0.60π)
0.48 exp(+j0.83π)
0.67 exp(−j0.23π)
0.57 exp(+j0.97π)
0.68 exp(−j0.09π)
0.42 exp(−j0.75π)
0.26 exp(−j0.19π)
0.56 exp(−j0.26π)
0.17 exp(+j0.22π)
0.40 exp(+j0.75π)
0.62 exp(−j0.58π)
0.34 exp(+j0.71π)
0.51 exp(+j0.38π)
0.28 exp(+j0.57π)
0.67 exp(+j0.96π)
0.10 exp(−j0.77π)
0.63 exp(+j0.30π)
0.56 exp(+j0.75π)
0.57 exp(−j0.06π)
0.60 exp(+j0.99π)
0.52 exp(−j0.54π)
0.64 exp(−j0.02π)
0.30 exp(−j0.32π)
0.38 exp(+j0.87π)
0.44 exp(−j0.59π)
0.77 exp(+j0.95π)
0.24 exp(−j0.71π)
0.15 exp(−j0.25π)
0.37 exp(+j0.25π)
,
0.71 exp(−j0.97π)
0.54 exp(+j0.08π)
0.53 exp(−j0.90π)
0.12 exp(−j0.28π)
,
0.61 exp(−j0.01π)
0.70 exp(+j0.62π)
0.53 exp(−j0.32π)
0.46 exp(−j0.20π)
,
0.71 exp(+j0.64π)
0.28 exp(+j0.63π)
0.27 exp(−j0.97π)
0.76 exp(+j0.15π)
,
0.39 exp(−j0.24π)
0.40 exp(−j0.04π)
0.48 exp(+j0.15π)
0.48 exp(−j0.15π)
,
0.29 exp(−j0.20π)
0.66 exp(−j0.67π)
0.39 exp(+j0.82π)
0.92 exp(−j0.83π)
,
0.26 exp(+j0.78π)
0.16 exp(−j0.50π)
0.25 exp(+j0.96π)
0.60 exp(−j0.57π)
,
0.23 exp(+j0.22π)
0.70 exp(−j0.62π)
0.38 exp(+j0.27π)
0.41 exp(+j0.55π)
,
0.48 exp(+j0.27π)
0.53 exp(−j0.31π)
0.53 exp(+j0.91π)
0.36 exp(−j0.10π)
,
0.75 exp(−j0.36π)
0.36 exp(+j0.93π)
0.46 exp(+j0.10π)
0.44 exp(+j0.23π)
,
0.69 exp(−j0.68π)
0.26 exp(+j0.87π)
0.65 exp(+j0.12π)
0.48 exp(−j0.38π)
,
0.51 exp(−j0.47π)
0.45 exp(+j0.97π)
0.52 exp(−j0.54π)
0.45 exp(+j0.51π)
,
0.61 exp(−j0.02π)
0.12 exp(+j0.37π)
0.64 exp(+j0.24π)
0.66 exp(−j0.09π)
.
0.12 exp(+j0.09π)
0.45 exp(−j0.46π)
65
66
付録 A
分散行列
A.2 Non-Coherent GSM
Non-Coherent GSM(2, N, 2, 4, 2), 2–PAM
[
0.09 exp(+j0.00π)
A1 =
0.65 exp(+j0.22π)
[
0.60 exp(+j1.00π)
A2 =
0.38 exp(−j0.09π)
[
0.35 exp(+j0.00π)
A3 =
0.82 exp(−j0.31π)
[
0.25 exp(+j0.00π)
A4 =
0.46 exp(+j0.11π)
Non-Coherent GSM(2, N, 2, 4, 2), 4–PAM
[
0.00
A1 =
0.61 exp(+j0.47π)
[
0.00
A2 =
0.63 exp(+j0.06π)
[
0.87 exp(+j0.00π)
A3 =
0.45 exp(+j0.25π)
[
0.17 exp(+j0.00π)
A4 =
0.69 exp(+j0.64π)
Non-Coherent GSM(2, N, 2, 16, 1), 4–PAM
[
0.48 exp(+j0.00π)
A1 =
0.74 exp(+j0.63π)
[
0.99 exp(+j0.00π)
A2 =
1.20 exp(+j0.00π)
[
1.28 exp(+j0.00π)
A3 =
0.88 exp(−j0.66π)
[
0.93 exp(+j0.00π)
A4 =
1.14 exp(+j0.66π)
[
0.21 exp(+j1.00π)
A5 =
1.14 exp(+j0.51π)
[
3.21 exp(+j0.00π)
A6 =
0.49 exp(−j0.07π)
[
1.28 exp(+j0.00π)
A7 =
0.89 exp(+j0.27π)
[
1.58 exp(+j1.00π)
A8 =
2.32 exp(−j0.75π)
0.65 exp(−j0.22π)
0.01 exp(+j1.00π)
0.38 exp(+j0.09π)
0.58 exp(+j0.00π)
0.82 exp(+j0.31π)
0.19 exp(+j1.00π)
0.46 exp(−j0.11π)
0.05 exp(+j1.00π)
0.61 exp(−j0.47π)
0.52 exp(+j0.00π)
0.63 exp(−j0.06π)
0.51 exp(+j0.00π)
0.45 exp(−j0.25π)
0.00
0.69 exp(−j0.64π)
0.21 exp(+j0.00π)
0.74 exp(−j0.63π)
0.71 exp(+j1.00π)
1.20 exp(−j0.00π)
0.88 exp(+j1.00π)
0.88 exp(+j0.66π)
1.07 exp(+j1.00π)
1.14 exp(−j0.66π)
1.81 exp(+j1.00π)
1.14 exp(−j0.51π)
0.44 exp(+j1.00π)
0.49 exp(+j0.07π)
2.59 exp(+j1.00π)
0.89 exp(−j0.27π)
0.98 exp(+j1.00π)
2.32 exp(+j0.75π)
0.76 exp(+j0.00π)
]
,
]
,
]
,
]
.
]
,
]
,
]
,
]
.
]
,
]
,
]
,
]
,
]
,
]
,
]
,
]
,
A.2 Non-Coherent GSM
[
A9 =
[
A10 =
[
A11 =
[
A12 =
[
A13 =
[
A14 =
[
A15 =
[
A16 =
0.77 exp(+j1.00π) 1.05 exp(−j0.28π)
1.05 exp(+j0.28π) 0.00
0.74 exp(+j1.00π) 1.91 exp(−j0.57π)
1.91 exp(+j0.57π) 0.01 exp(+j1.00π)
0.65 exp(+j0.00π) 0.84 exp(+j0.27π)
0.84 exp(−j0.27π) 0.80 exp(+j1.00π)
0.00
0.71 exp(−j0.05π)
0.71 exp(+j0.05π)
0.12 exp(+j1.00π)
0.65 exp(+j0.00π)
0.55 exp(+j0.09π)
0.55 exp(−j0.09π)
0.60 exp(+j1.00π)
0.85 exp(+j1.00π) 3.50 exp(+j0.06π)
3.50 exp(−j0.06π) 0.00
0.27 exp(+j0.00π) 0.03 exp(−j0.60π)
0.03 exp(+j0.60π) 0.46 exp(+j1.00π)
0.00
1.61 exp(−j0.10π)
1.61 exp(+j0.10π) 0.00
Non-Coherent GSM(3, N, 3, 3, 3), 4–PAM
0.00
0.32 exp(−j0.61π)
A1 = 0.32 exp(+j0.61π) 0.72 exp(+j0.00π)
0.95 exp(−j0.96π) 0.29 exp(−j0.21π)
0.60 exp(+j0.00π) 0.05 exp(+j0.56π)
A2 = 0.05 exp(−j0.56π) 0.27 exp(+j0.00π)
0.23 exp(+j0.72π) 0.91 exp(+j0.39π)
0.98 exp(+j0.00π) 0.00
0.45 exp(+j1.00π)
A3 = 0.00
0.49 exp(−j0.10π)
0.00
]
,
]
,
]
,
]
,
]
,
]
,
]
,
]
.
0.95 exp(+j0.96π)
0.29 exp(+j0.21π) ,
0.46 exp(+j0.00π)
0.23 exp(−j0.72π)
0.91 exp(−j0.39π) ,
0.00
0.00
0.49 exp(+j0.10π) .
0.68 exp(+j0.00π)
67
68
付録 A
分散行列
A.3 Single-RF Non-Coherent GSM
Single-RF Non-Coherent GSM(2, N, 2, 2, 1), 2–PAM
A1 = diag(0.41, 2.41),
A2 = diag(2.41, 0.41).
Single-RF Non-Coherent GSM(3, N, 3, 5, 1), 2–PAM
A1
A2
A3
A4
A5
= diag( 0.56, 0.11, 1.74),
= diag(
1.88, 3.56, 5.11),
= diag(
0.24, 1.78, 0.22),
= diag( 11.04, 0.72, 0.74),
= diag( 5.59, 7.35, 11.04).
Single-RF Non-Coherent GSM(4, N, 4, 14, 1), 2–PAM
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
A14
= diag(
= diag(
= diag(
= diag(
= diag(
= diag(
= diag(
= diag(
= diag(
= diag(
= diag(
= diag(
= diag(
= diag(
0.72,
0.35, 2.60, 0.04),
1.73, 0.66, 0.03, 0.46),
3.36, 0.04, 1.30, 1.05),
0.19, 2.17, 9.94, 0.69),
0.64, 22.96, 0.24, 1.26),
0.10, 0.22, 0.48, 3.43),
1.09, 1.43, 0.95, 39.19),
8.30, 3.11, 0.62, 0.14),
0.58, 4.36, 3.45, 1.46),
9.66, 4.58, 3.59, 2.23),
2.52, 0.00, 6.18, 1.43),
3.07, 3.76, 5.85, 6.72),
0.05, 7.08, 12.44, 7.62),
1.08, 5.39, 9.03, 11.47).
Single-RF Non-Coherent GSM(7, N, 7, 6, 3), 2–PAM
A1
A2
A3
A4
A5
A6
= diag(
= diag(
= diag(
= diag(
= diag(
= diag(
−0.87, −0.09,
0.24, −0.83,
0.95, −1.30,
0.94),
0.44, −0.03, −1.95, −0.17, −0.65, −0.46,
0.21),
0.66,
0.90,
0.71,
1.25, −0.89, −1.23,
1.30),
−0.50,
0.50, −0.35, −1.30, −1.33,
0.32,
1.22),
−0.51, −1.12,
0.89,
1.00, −0.90,
0.88,
0.27),
−0.72,
0.82,
0.28,
0.25, −0.38,
0.09, −1.35).
Single-RF Non-Coherent GSM(10, N, 10, 8, 4), 2–PAM
A1
A2
A3
A4
A5
A6
A7
A8
= diag(
= diag(
= diag(
= diag(
= diag(
= diag(
= diag(
= diag(
0.67,
−1.61,
0.75,
−0.13,
−1.19,
1.31,
0.96,
−0.92,
−0.32,
−0.06,
−0.21,
1.17,
0.26,
−2.53,
1.94,
−0.26,
−1.21,
−1.10,
−0.46,
0.41,
1.53,
0.78,
−0.95,
−0.14,
1.22,
−0.02,
−0.77,
0.69,
1.32,
0.82,
−0.46,
−0.54,
−0.02,
0.17,
−1.01,
−0.08,
−0.04,
0.34,
2.24,
0.30,
0.75,
−0.07,
0.58,
−0.12,
2.03,
1.47,
0.24,
1.07,
−0.01,
2.01,
0.47,
1.21,
2.11,
−0.94,
−0.27,
0.09,
−0.46,
−0.70,
−0.74,
−0.08,
0.31,
0.34,
0.30,
2.90,
−0.35,
−0.86,
1.09,
0.14,
1.76,
−0.64,
0.55,
−0.63,
0.60),
−1.47),
−0.90),
−1.95),
0.37),
−1.74),
−0.42),
1.04).
© Copyright 2026 Paperzz