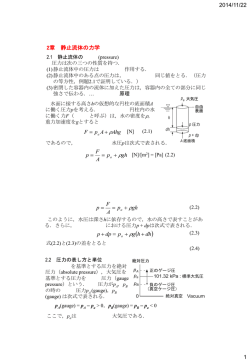
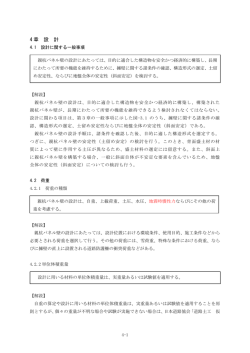
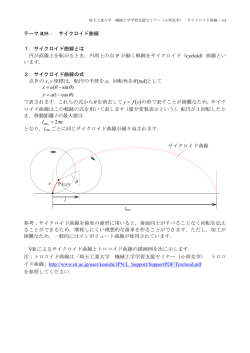
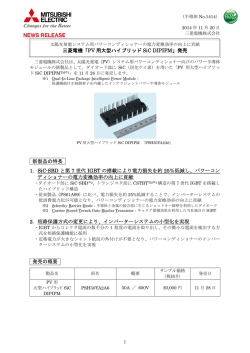
電気学会技術者教育委員会パワーエレクトロニクス教育 WG 第3回パワエレ・セミナー「電動機駆動の基礎:その2」 2014 年 3 月 13 日(木)13:00~17:00 於:青山学院大学相模原キャンパス L 棟 L-402 教室 主な内容 1. はじめに:本セミナーの概要と位置づけ。 2. 空間ベクトルを用いた電動機の基本式: αβ座標および dq 座標での永久磁石同期電動機の基本式を空間ベクト ルを用いて表現する場合の考え方とメリットについて説明。 3. インバータの制御遅れを考慮した電流制御: 三相電圧形 PWM インバータにより電動機の三相入力電流を制御する場 合には、インバータの制御遅れを考慮することが重要です。この制御遅れ を考慮して安定な電流制御を実現するための基本的考え方を説明。サンプ ル値制御系として取扱いや、αβ座標と dq 座標での考え方の違い、非干渉 制御の考え方、ゲインの設計手法などについて説明。 4. 回転位置および回転角速度の計算法: エンコーダの ABZ 信号からを回転位置を決める手法、回転位置情報から 回転角速度を演算する手法について説明。 5. トルク制御および速度制御: 機械系の運動方程式をもとに、速度制御系の構成とゲインの設計手法に ついて説明。誘導電動機についてはベクトル制御の基本的考え方を、永久 磁石同期電動機については突極性を利用する場合の電流制御パターンにつ いても説明。 6. インバータの電圧制御誤差やパラメータ誤差への対応: 三相電圧形インバータの PWM 制御によりベクトル制御や位置/速度セ ンサレス制御を行う場合には、デッドタイムやデバイスのオン電圧による 電圧制御誤差が問題となる。その基本的考え方や補償法について説明。電 動機のパラメータ誤差の影響や対策についても説明。 7. アンケート: 基礎知識(これまでの学習内容)の状況、セミナーの内容やレベル、説 明方法について、今後開催を希望するテーマなど 1 1. はじめに 前回のセミナー「電動機駆動の基礎:その1」の主な内容 1)空間ベクトルと三相/dq 変換 2)三相電流波形と高調波 3)電動機モデルの導出 4)三相電圧形インバータ 5)三相電圧形インバータの PWM 制御 今回のセミナーはその復習 (インバータおよび PWM 制御を除く) と制御関係の解説を中心に進める。 永久磁石同期電動機の可変速駆動システムの構成 dq/三相 変換 速度制御 (PI制御) i dq v dq 三相 電圧 指令 dq 電流制御 (P制御+ 非干渉制御) i dq 変調率 (mu,mv,mw) 演算 コモンモード 電圧加算 三相/dq 変換 m 三相PWM 三角波比較 直流電圧 三相 電流 電圧(Ed) 電流(iu,iw) 検出 ゲート信号 三相電圧形 PWM インバータ dq ˆ 回転速度 演算 dq 回転角度 演算 ABZ パルス ABZ エンコーダ 永久磁石 同期電動機 ○主なハードウェア 電動機(ABZ エンコーダ付) インバータ(電流センサおよび直流電圧センサ付) ○制御はワンチップマイコン(高性能、低価格) (多機能:ABZ エンコーダ入力、AD コンバータ、PWM 機能) 2 ○基本的には電流制御など、全ての機能を制御プログラムで実現。 ○プログラミングのためには原理を確実に理解しておく必要あり。 ○制御系の設計には定量的な検討が不可欠。 ○このセミナーでは基本的な考え方、具体的な計算方法を解説、 「制御系設計の基礎」⇒ 数式が多くなるがご容赦を 空間ベクトルと三相/dq 変換(復習) 空間ベクトルとは ○基本式(三相/αβ変換) 空間ベクトルの定義 三相3線式では i , i i j 2 iu e 3 2 3 iv e j 4 3 iw iu iv iw 0 ( i0 0 )であり、零相分を除いて、 だけを考え、複素数で表示可能 i i j i i e j e j cos j sin 基本波のみを考える場合は、極座標表示は振幅と位相に対応。 3 uvw, αβの座標軸の関係 v u, a w 注1:複素数1、 e j 2 3 、e j 4 3 は各相の固定子巻線(正弦波分布を仮定)に正 の電流を流した場合にギャップの起磁力(回転子から固定子に向かう方 向を正とする)が最大となる方向を表すもので、三相交流で良く使われ るフェザーとは異なる。 注2:例えば、三相電流のフェザー Iu I 、 Iv Ie j 2 3 、 Iw Ie j 4 3 は正弦波 波形の実効値と位相を複素数で表したものであり、それぞれ、 iu 2 I cos t 、 iv 2 I cos t 2 3 、 i w 2 I cos t 4 3 に対応するものである。 注3:交流フェザーは角周波数 が一定の正弦波のみ考えるのに対し、空間ベ クトルでの三相電圧・電流は瞬時値(高調波を含む任意の波形)を考え る。ただし、三相電流あるいは三相電圧の合計は零とする。 4 注4:三相電流あるいは三相電圧にコモンモード成分が含まれていても、 1 e j 2 3 e j 4 3 0 であることから、空間ベクトルには反映されない。 ○空間ベクトル(複素数)の内積 複素数を、単位ベクトルとして1およびjを持つベクトルと考え、内積(演 算子を●で表す)を計算する。 基本 x a j b xe j , y c j d ye j x y ac bd xy cos 大切な関係式 11 e 1 e j 2 3 j 2 3 e e j j 2 3 2 3 e e j 4 3 j 4 3 e j 4 3 1 1 e j 4 3 1 2 x y z x z y z これらの関係を用いると i 1 iu j 2 iu e 3 2 3 iv e 2 i 1 3 j 4 3 iw 1 2 1 iu iv iw 3 2 3 iu 2 2 Re i 3 同様に j 2 i e 3 3 2 iv 2 j 2 Re i e 3 3 5 , i w 4 j 2 Re i e 3 3 ○電圧・電流とも同じ変換式に従う。 2 3 i j 2 iu e 3 v j 2 vu e 3 2 3 iv e j 4 3 vv e j iw 4 3 vw ○三相の瞬時電力は電圧ベクトルと電流ベクトルの内積 p t v i j 2 vu e 3 2 3 vv e j 4 3 2 4 j j 3 3 v w iu e iv e iw 1 1 1 2 1 1 1 v i i i v i i i v i i iv u u v w v v w u w w u 2 2 2 2 3 2 2 vu iu vv iv v wiw 注5:αβ変換の係数 2 3 は絶対変換(変換の前後で電力が変化しない)と なるように選んだ結果である。即ち、電圧と電流が同じ変換式に従い、 三相全体の電力が電圧ベクトルと電流ベクトルの内積で簡単に計算で きるように選んだ結果である。 注6:三相電流を次式で与えると、 iu 2 I cos t , iv 2 I cos t 2 / 3, iw 2 I cos t 4 / 3 対応する空間ベクトルは i 3Ie jt となる。即ち、空間ベクトル の大きさは線電流の実効値の 3 となる。電圧の場合は線間電圧実効値。 6 同期回転座標(dq 座標)とは 回転磁界に同期して回転する dq 座標(同期回転座標)から見ると、基本波 の電圧・電流の空間ベクトルが静止(直流)して見えるため解析が簡単となる。 ○基本式(αβ/dq 変換) idq e j t i , v dq e j t v i e j t idq , v e j t v dq ただし、α軸に対する d 軸の角度を t 2 Re i 2 I cos t , 3 2 iv Re i e j 2 / 3 2 I cos t 2 / 3 3 2 iw Re i e j 4 / 3 2 I cos t 4 / 3 3 iu i 3Ie j t idq e j t i 3I dq 軸、αβ軸、三相の関係 v q とする。一例として dq 軸およびαβ軸から見た空間ベクトルの成分 q d t d u, a a w 7 注1:回転する i , v に e 静止した idq , v dq に e j t j t を乗ずると静止した idq , v dq に変換され、逆に、 を乗ずると回転する i , v に変換されると考え ると忘れない。 注2:座標軸の動きとその座標から見えるベクトルの動きは逆になることに注 意。同じ空間ベクトルであっても、回転している dq 座標から見ると静 止したベクトル idq , v dq となり、静止したαβ座標から見ると回転するベ クトル i , v となる。 注3:同様に、u 相軸の方向に比べ、v 相軸の方向は 2 3 だけ空間位相が進ん でおり、w 相軸の方向は 4 3 だけ空間位相が進んでいるが、回転する 空間ベクトル i を各軸から見た正弦波電流波形を比較すると、 iu に比 べ、iv は 2 3 だけ位相が遅れており、iw は 4 3 だけ位相が遅れている。 注4:複素数を用いて空間ベクトルを表現すると、回転座標変換を簡単に表現 することができる。行列を用いると分かりにくい。逆行列も単なる除算 となる。 idq e jt i i e jt idq 1 e j t e j t id cos t i q sin t i cos t i sin t cos t sin t sin t i cos t i sin t id cos t iq sin t cos t 8 1 cos t sin t sin t cos t 2.電動機の基本式 永久磁石同期電動機の基本式 ○三相を1つの式で表現( iu iv iw 0 とする) vu riu p l M iu 1 pM iv iw eu 2 vv riv p l M iv 1 pM iw iu ev 2 vw riw p l M iw 1 pM iu iv ew 2 3 v ri p l M i e 2 v ri pL i e ただし、 p d , dt 3 Ll M 2 注5:相間の相互誘導により、各相の有効インダクタンス M は 3 / 2 倍されて L にあらわれる。 ○dq 軸での電圧・電流方程式 v ri p Li e v dq e jt r e jt i dq e jt p Le jt i dq e jt e jt e dq e jt v dq r e jt i dq p Le jt i dq e jt e dq v dq ri dq p j Li dq e dq 9 結果としては、 dq, p p j とすればよい。 また、永久磁石による磁束を m とすると、 e dq j m である。 ○突極形(IPM など)の場合は dq 軸でインダクタンスが異なることを考慮。 v dq ri dq p j Ld id j Lq iq j m dq 軸の成分に分解すると vd j vq r id j iq p j Ld id j Lq iq j m vd rid p Ld id Lq iq vq riq Ld id p Lq iq m ○参考 突極形の場合のαβ軸での電圧電流方程式は複雑な関係式となる。 dq 軸での関係式をαβ軸での関係式に変換してみる。 e j t v r e jt i p j Ld Re e jt i j Lq Im e jt i e jt e e jt v r e jt i p j L2d e jt i j i e jt i j i Lq p j e j t i j i e j t i j i e j t e 2 Ld Lq j 2t Ld Lq v ri e p i j i e i j i 2 2 Ld Lq Ld Lq j 2 t i e v ri e p 2 2 Ld Lq Ld Lq j 2 t j i e p 2 2 10 実部および虚部をとり、α軸とβ軸での関係に直すと、 v ri e v ri e Ld Lq 2 Ld Lq 2 pi pi Ld Lq 2 Ld Lq 2 pi cos 2t i sin 2t pi sin 2t i cos 2t 行列の形に変形すると v 1 0 i e r v 0 1 i e Ld Lq 2 1 0 i Ld Lq cos 2t sin 2t i p p i 0 1 2 sin 2t cos 2t i 以上の結果より、突極形(IPM など)の場合は dq 軸で考えるのが適切。 誘導電動機の基本式 ○静止座標(αβ軸)では次式が成り立つ。 v1 _ r1 p 1 0 r 2 p Lm i1 _ r2 p j m Lm i m _ ○同期回転座標(dq 軸)の関係に変換すると(形式的に添え字のαβを dq に、 また、微分演算子 p を(p+jω)に置き換えればよい) v1 _ dq r1 p j 1 0 r2 p j Lm i1 _ dq r2 p j m Lm i m 11 この関係式を等価回路で表わすと、次のようになる。 過渡時にも適用できる誘導電動機の等価回路 ただし、 T2 は二次側の回路の時定数であり、 T2 12 Lm L2 r2 r2 3.インバータの制御遅れを考慮した電流制御 注1:インバータは PWM により電圧を制御するが、通常、1制御周期 T(三 角波比較方式のキャリア周波数 fc=1/T)の間の平均電圧を考える。こ この電圧はαβ軸での値であり、dq 軸で考える場合には注意が必要。 注2:PWM の制御電圧は制御周期毎に更新されるが、電流制御などの演算の ため、必然的に1制御周期の遅れ(電流検出タイミングに対し、制御電 圧更新のタイミング)が生じる。 制御周期での平均電圧の計算の一例 表面永久磁石同期電動機で逆起電力に高調波が含まれる場合、基本波電流の みを流すために必要な電圧は次式に従って算出される。ただし、永久磁石によ る鎖交磁束は基本波成分の中心に対し対称であると仮定した。 v t d d i1e j t r i1e j t 1e j t 5 e j 5t 7 e j 7t dt dt 制御周期内(kT≦t≦(k+1)T)での平均電圧を算出し、制御周期の中点のタ イミング(t=(k+1/2)T)での電圧と定義すると、 1 k 1T v t d t T kT k 1T r k 1T 1 j t e d 1e j t 5e j 5t 7 e j 7t t i 1 kT kT T T k 1T r i1 _ k 1T e j k 1T i1 _ kT e j kT kT 2 v _ k 1 / 2 T i1e j t T i1e j t T 1 1e j t 5 e j 5t 7 e j 7t T k 1T kT なお、抵抗による電圧降下は平均電流によるもので近似した。 更に計算を進め、整理すると次式を得る。 13 k 1T kT v _ k 1 / 2 T T sin i1 _ k 1T i1 _ kT i1 _ k 1T i1 _ kT 2 j k 1 / 2 T T e cos j T T 2 2 2 i1 _ k 1T i1 _ kT T j k 1 / 2 T T i1 _ k 1T i1 _ kT r cos sin e j 2 2 2 2 T 5T 7T sin sin sin 2 j k 1 / 2 T 2 j 5 k 1 / 2 T 2 j 7 k 1 / 2 T j1 j 5 5 j 7 7 e e e 5T 7T T 2 2 2 ここで、次の関係式に注意する。 1 1 cos x 1 x 2 x 4 , 2! 4! x T 2 f fc 0.02 sin x x x fc 50, f 1 3 1 5 x x 3! 5! 1 1 x 2 1 x 4 3! 5! x x 2 4.0 10 3 即ち、基本波周波数の最大値に対して 50 倍のキャリア周波数を設定すれば、 cosT / 2 1 0.2 10 2 , sin T / 2 1 0.07 10 2 , T / 2 sin T / 2 6.0 10 2 , sin 5T / 2 1 1.6 10 2 , 5T / 2 sin 7T / 2 1 3.2 10 2 7T / 2 と計算できる。また、抵抗による電圧降下は小さいことから、次のような dq 軸の関係式に書き換えることができる。 v _ k 1 / 2 T i1 _ k 1T i1 _ kT i1 _ k 1T i1 _ kT j T 2 j k 1 / 2 T i1 _ k 1T i1 _ kT e r 2 j1e j k 1 / 2 T j 5 5 e j 5 k 1 / 2 T j 7 7 e j 7 k 1 / 2 T 即ち、 14 j k 1 / 2 T e v dq _ k 1 / 2 T v _ k 1 / 2 T e j k 1 / 2 T i1 _ k 1T i1 _ kT T j j1 j 55 e i1 _ k 1T i1 _ kT r i1 _ k 1T i1 _ kT 2 2 j 6 k 1 / 2 T j 77 e j 6 k 1 / 2 T となり、dq 軸での次の関係式を差分化したものと一致する。 d v dq t j i1 ri1 j1e j t j 55 e j 6t j 7 7 e j 6t dt なお、基本波周波数が高く、キャリア周波数を 50 倍程度に選べない場合は、 高調波電圧に対して補正係数をかける必要がある。 電流制御の考え方 ○dq 座標での突極形永久磁石同期電動機の基本式は、 d v dq j Ld id j Lq iq r id j iq j m d t ○モータパラメータ、速度、電流の正確な情報が得られれば、電流に関する フィードバックは比例制御とする。 結果として、制御の基本式は(P 制御+非干渉制御) ただし、パラメータ誤差、インバータ電圧制御誤差を考慮し、定常偏差低減 のために積分制御を付加する場合が多い。 ○比例制御の場合、電圧指令値は次式で与える。 v dq j Ld id j Lq iq r id j iq j m k j Ld id j Lq iq Ld id j Lq iq j Ld id j Lq iq r id j iq j m k Ld id j Lq iq Ld id j Lq iq 15 電圧制御誤差がないとし、2つの式の差分を取ることにより、 d k Ld id j Lq iq k Ld id j Lq iq d t 従って、ラプラス変換して伝達関数を考えると ( s ) Ld id ( s ) j Lq iq ( s ) k ( s ) Ld id ( s ) j Lq iq ( s ) s k ○連続系として考えると k を大きく選べば応答速度が上げられることになる。 ○パラメータ誤差や電圧制御誤差がある場合に、電流の定常偏差を零とするた めには、積分補償を不可する必要がある。簡単のため電圧誤差のみを考えた 場合、次式が成り立つ。 k sλ ( s ) v dq ( s ) k p i λ ( s ) λ ( s ) s ただし、 λ( s ) Ld id ( s ) j Lq iq ( s ), λ ( s ) Ld id ( s ) j Lq iq ( s ), v dq ( s ) vd ( s ) j vq ( s ) この場合の応答は次式のように計算され、電流の定常偏差は零となる。 λ( s ) k p s ki s 2 k p s ki λ (s) s v dq ( s ) 2 s k p s ki また、積分補償の項を計算すると、次式が得られ、その最終値は電圧誤差に 等しくなる。 ki ki s ki λ ( s ) λ( s ) 2 λ (s) 2 v dq ( s ) s s k p s ki s k p s ki PI 制御の場合のゲイン設計については第4節を参照。 16 ○PWM インバータを用いる場合は制御遅れの検討が不可欠。 ○サンプル値制御系として検討 サンプル値系はz変換で解析 I ( z ) inT z n , inT i nT 定義 n 0 z変換の例 i (t ) 1, z n I ( z) n0 i (t ) e at I ( z) , 1 1 z 1 e anT z n n0 i (t ) te at , I ( z) nTe anT z n 1 1 e aT z 1 n0 Te aT z 1 1 e aT z 1 2 d anT n z nTe anT z n e d a n 0 n0 d 1 Te aT z 1 d a 1 e aT z 1 1 e aT z 1 2 ○z変換による電流制御系の解析(インダクタンスのみを負荷とした場合) 基本式のサンプル値系としての表現 電流制御の制御遅れ(1サンプリング周期)を考慮すると L i( n 1)T inT vn 1 / 2 T T vn 1 / 2 T k i(n 1)T i( n 1)T 2つの式を組み合わせると L i( n 1)T inT k i(n 1)T i( n 1)T T 17 z変換した関係式では、1サンプルリング周期の遅れが z 1 を乗ずることに相 当するため、 L I z z 1 I z k z 2 I z z 2 I z T I z kT / L z 2 I z 1 z 1 kT / L z 2 I z 具体的な計算例(ステップ応答) 1) kT / L 1 / 4 1 1 z 1 の場合 z 2 0.25 z 2 1 1 1 4 I z 1 z 1 0.25 z 2 1 z 1 2 z 1 2 1 z 1 2 z 1 2 1 z 1 1 1 1 z 1 n 10.5 n z n 1 1 z 1 0.5 z 1 z 1 z n 1 2 0 0 z 1 0.25 z 2 0.5 z 3 1 n 10.5 n z n 2) kT / L 1 / 3 の場合 (1 / 3) z 2 1 z 2 1 I z 1 z 1 (1 / 3) z 2 1 z 1 3 3 z 1 z 2 1 z 1 z 2 1 A A B a z 1 a z 1 1 z 1 a z 1 a z 1 1 z 1 ただし a 3e j / 6 1.5 j 0.5 3, a 3e j / 6 1.5 j 0.5 3 18 a2 1 j 3, A a a 1 a A j 3, B 1 a 1a 1 従って I z A/a A /a B 1 z 1 / a 1 z 1 / a 1 z 1 0 .5 j 0 . 5 3 0 .5 j 0 .5 3 1 1 z 1 / a 1 z 1 / a 1 z 1 n 0.5 j 0.5 3 z 1 / a n 0 n n 1 0.5 j 0.5 3 z / a z 1 n0 n 0 1 1 1 j 3 1 1 n 1 n n n n z 2a 2 a a a n 0 1 3 n n 1 n / 2 cos n / 2 sin 6 3 6 3 n 0 具体的に計算すると 19 n z 1 i0 0 3 1 1 3 0 31 / 2 2 31 / 2 2 11 3 3 1 3 1 1 1 32 3 2 6 6 3 1 3 1 2 1 3/ 2 0 3/ 2 1 3 3 3 3 1 1 3 3 1 3 8 1 2 2 1 18 18 9 3 2 3 2 1 3 3 1 1 1 5 / 2 1 1 1 5 / 2 18 18 3 2 3 2 1 3 28 1 3 1 3 0 27 3 3 iT 1 i2T i3T i4T i5T i6T 1 3) kT / L 1 / 2 の時 z 2 1 A A B I z a z 1 a z 1 1 z 1 a z 1 a z 1 1 z 1 a 2e j / 4 1 j a 2e j / 4 1 j 2 1 2e j / 4 j2 a2 j, A j A a a 1 a j 2 j j 2 j 1 1 B 1 a 1a 1 j j j 1 j 3 / 4 A A e 1 j, 1 j j / 4 a a 2 2e 20 I z A/a A /a 1 z 1 / a 1 z 1 / a 1 j 1 j B 1 z 1 1 1 z 1 / a 1 z 1 / a 1 z 1 n n n 1 1 1 j z / a 1 j z / a z 1 n 0 n 0 n 0 1 1 1 1 1 n n j n n z n a a a a n 0 1 n 1 n / 2 cos 4 2 n 0 1 n n / 2 sin 2 4 1 n I z 1 n / 2 cos 4 2 n 0 n z 1 n n / 2 sin 2 4 n z i0 0 2 1 2 0 21 / 2 2 21 / 2 2 1 1 1 2 2 1 2 1 2 3 / 2 1 3 / 2 1 2 2 2 2 1 1 5 1 2 1 2 0 4 2 2 1 2 1 2 5 5 / 2 1 5 / 2 2 2 2 2 4 1 1 9 1 3 0 3 1 8 2 2 iT 1 i2T i3T i4T i5T i6T 1 以上の結果をもとに、ステップ応答をグラフに示すと 21 1.4 1.2 1 i*(nT) 0.8 k=L/4T 0.6 k=L/3T 0.4 k=L/2T 0.2 0 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 ○制御遅れに対する対策をしない場合、 比例ゲインは(L/T)の1/3程度が適切。 ○制御遅れに対する対策 現在の電圧を用いて、次式に従って電流を予測する。 inT i( n 1)T T v( n 1 / 2 ) T L 電圧の制御式を変更 T vn 1 / 2 T k in 1T i( n 1)T v( n 1 / 2 )T L この時、次式のように考えることができる。 L i( n 1)T inT k i(n 1)T inT T L I ( z ) z 1 I ( z ) k z 2 I ( z ) z 1 I ( z ) T I ( z) kT / L z 2 I ( z ) 1 (1 kT / L ) z 1 22 1) kT / L 1 の場合 I z z 2 I z 2) kT / L 1 a I z z 2 I z の場合 I ( z ) 1 a z 2 I ( z ) 1 az 1 1 1 z 1 1 a z 2 1 1 2 a I z z 1 az 1 1 z 1 1 az 1 1 z 1 I z 1 a z 2 I z 1 1 2 a z 1 az 1 1 z 1 1 az 1 1 z 1 2 z 2 a1 az 1 az 1 1 z 1 z 2 2 2 1 3 2 z 1 a 1 a z 1 a z ○計算に使用するインダクタンスが実際の値とずれている場合。 L i( n 1)T inT vn 1 / 2 T T T vn 1 / 2 T k i(n 1)T i( n 1)T v( n 1 / 2 )T Lˆ ただし、 L は実際値、 Lˆ は計算に用いた値 この時、次のように考えることができる。 vn 1 / 2 T kT v( n 1 / 2 )T k i(n 1)T i( n 1)T Lˆ z変換して考えると、 23 L I ( z ) z 1I ( z ) z 1V z T kT 1 1 1 ˆ z V z kz I ( z ) I ( z ) L 代入して整理すると、 T 2 T 2 kT 1 1 1 1 ( ) z z k z I z k z I ( z) L L Lˆ I ( z) kT / L z 2 I ( z ) 1 (1 kT / Lˆ ) z 1 kT 1 / L 1 / Lˆ z 2 kT 1 Lˆ I ( z) Lˆ / Lz 2 1 a2 z 2 I ( z ) 1 1 Lˆ / L z 2 1 a 2 z 2 a 1 Lˆ / L 1 1 z 1 1 z 1 1 a2 z 2 1 1 I z 1 a 2 z 2 1 z 1 1 a 2 z 2 1 z 1 2 4 1 z 1 z 2 z 3 1 az 1 az 1 2 4 z 11 az 1 az 1 1 2 2 2 3 0 0 z 1 a z 1 a z 1 a 4 z 4 1 a 4 z 5 I z 以上の結果より、インダクタンスの誤差をパラメータにステップ応答を図示 すると、 24 1.6 1.4 1.2 電流 1 0.8 0.6 0.4 0.2 0 0 1 2 3 4 5 6 7 8 9 10 時間 T間隔 ○インダクタンスの値を正確に合わせる必要があるが、制御遅れを考慮した電 流制御を行うと、2サンプル周期で指令値に一致させることができる。 永久磁石同期電動機における電流制御(制御遅れを考慮)のまとめ 1)現在( t ( n 1)T )の検出電流値と電圧指令値および非干渉制御成分より、 次のタイミング( t nT )での電流を予測。指令電圧がリミットされた場合は リミットされた値を使用。 id _ nT id _( n 1)T iq _ nT iq _( n 1)T T vd _( n 1 / 2 )T ed _( n 1 / 2 )T L T vq _( n 1 / 2 )T eq _( n 1 / 2 )T L ただし、 r i / 2 L i / 2 ed _ n 1 / 2 T r id _( n 1)T id _ nT / 2 Lq iq _( n 1)T iq _ nT / 2 eq _ n 1 / 2 T q _( n 1)T iq _ nT d 25 d _( n 1)T id _ nT m 2)次のタイミング( t ( n 1 / 2 )T )での抵抗の電圧降下および逆起電力を 予測 r i / 2 L i / 2 ed _ n 1 / 2 T r id _ nT id _( n 1)T / 2 Lq iq _ nT iq _( n 1)T / 2 eq _ n 1 / 2 T q _ nT iq _( n 1)T ここで、 id _( n 1)T id _( n 1)T , d d _ nT id _( n 1)T iq _( n 1)T iq _( n 1)T m と近似。 3)次のタイミング( t n 1 / 2 T )での電圧指令値を計算 vd _ n 1 / 2 T vq _ n 1 / 2 T L id _ nT id _ nT ed _ n 1 / 2 T T L iq _ nT iq _ nT eq _ n 1 / 2 T T 4)v dq vd _ n 1 / 2 T j v q _ n 1 / 2 T を三相電圧に変換、ただし、現在( t ( n 1)T ) の回転角度に比べ、基本波の位相を1 .5 T だけ進めておく必要あり。 その他の注意点 ○実際には PWM のデッドタイムによる電圧制御誤差の補償が必要 ○磁気飽和によるインダクタンスの変化がある場合には制御ゲインの変更が 必要。 ○モータパラメータを出来るだけ正確に把握。誤差が大きい場合には電流制御 に積分も付加することも必要。 26 4.位置および速度の計算法 ロータリーエンコーダ(ABZ、インクレメンタル) ○ロータリーエンコーダとは: 回転するディスクにスリットを設け、光信号を検出して、回転状況を把握。 インクレメンタル:基準の位置の信号(Z)と単位回転角毎に発生する信号 (A、B)を出力、A、B 信号に位相差を設けることにより、 回転方向を判断。 アブソリュート:回転角度に応じて必要なビット数の角度情報を出力。 ○ABZ 信号と回転位置の関係 A B Z n= ‐6 ‐5 ‐4 ‐3 ‐2 ‐1 0 1 2 27 3 4 5 6 7 8 9 ○A 信号、B 信号のいずれかが変化したら位置信号nを変更する。 一回転当たりのパルス数を p とすると、 2 p n 2 p 1 n 2 p ( )と n 2 p ( )は同じ位置 AB 信号の1周期を4分割していることから、一回転を 4pに分割 ○nを直接決められる場合 Z 1で AB 01 の場合は n 0 Z 1で AB 11 の場合は n 1 ○nを増減する条件( Z 0 ) 前の状態 今の状態 AB=00 AB=10 AB=11 AB=01 AB=00 AB=01 AB=11 AB=10 AB=10 AB=11 AB=01 AB=00 AB=01 AB=11 AB=10 AB=00 ○ n 2 p の時は ○角度 n 2 p nの増減 n=n+1 n=n-1 に、 n 2 p 1 の時 n 2p 28 n 2 p 1 に変更。 回転角度θから角速度ωを求める方法 ○基本式 角度 0t d t 角度推定値 ˆ 0t ˆ d t 推定誤差 e ˆ 角速度演算式 ˆ k p ˆ k I 0t ˆ d t ○ブロック線図 ○伝達関数 sk P k I 2 sk k I ˆ ˆ ab s s 2 P 1 sk P k I s sk P k I s a s b s2 ただし kI kP a b ab k P 29 ab 2 k I ○a,b の設計 ab a b b(a 1) a b a a 1 1 a 2 b 具体的数値例 a 2 1.5 1.2 1.1 1.05 b 2 3 6 11 21 b/a 1 2 5 10 20 ab=a+b 4 4.5 7.2 12.1 22.05 ○加速時の推定誤差(a=b=2) (t ) t 4s 4 2 ( s ) ˆ ( s ) 1 2 2 2 s 2 2 s 4s 4 s (t ) ˆ (t ) te 2t 誤差の最大値を求めると d (t ) ˆ (t ) e 2t 2te 2t 0 t 1 dt 2 (t ) ˆ (t )max 1 2e 1 0.735 e 2 4 kP 30 ○加速時の推定誤差(1<a<b) (t ) t 2 a b s ab ( s ) ˆ ( s ) 1 2 2 2 s a b s ab s 1 1 s a s b b a s a s b (t ) ˆ (t ) e a t e b t b a 誤差の最大値を求めると d (t ) ˆ (t ) ae at bebt 0 b a dt ae at be bt eb a t b a 1 b e a t a b ba a ba e at e bt e at e at e at b b (t ) ˆ (t )max ○加速時( ab t b b 1 a ba b ba 1 b a b a b b 1 ba a b k P b a )の推定誤差は最大で 31 a b ba 1 4 .8 1.2 6 k P 61.2 0 .8 [rad/s] kP 程度 kP 0.8 ○加速時の角度推定の定常誤差(参考) 1 2 t 2 2 a b s ab ˆ ( s ) ( s ) 1 2 2 3 s a b s ab s s2 2 s a b s ab 2 s 3 s a s b s 1 1 1 1 1 1 2 ab s ab a s a bb a s b lim ˆ s s 0 ab 2 k I 1 1 1 a t b t e e bb a 2 ab ab a e (0) 0, e ( ) ab 2 k I e (t ) (t ) ˆ(t ) ○加速時( 1 2 t )の角度推定値の定常誤差は [rad] 2 kI ○具体的な数値例 314(50 Hz ) a 1.1, b 11, 20 k P a b 12.1 242 lim ˆ s 0.065 rad s 0 k I ab 2 12.1 400 4840 (t ) ˆ (t )max 1.04 rad/s 注意)制御周期 T(周波数 Fs)のプログラムに組み込む場合 k PT 1 k P ab 0.2 * Fs 32 ○エンコーダの分解能によるリプル成分 1 回転 1000 パルスのエンコーダの場合、 の分解能 2 / 4000 0.00157 rad/s 0.09 deg 、 従 っ て 、 k P 0.35 rad/s のリプルが角速度推定値に重畳する。 ○速度推定の伝達関数を考慮した速度制御系の構成 ブロック線図 A:速度推定の伝達関数を指令値側にも挿入 ブロック線図 B(A と等価):速度制御劣化を防止 33 350 角速度 角速度 [rad/s] 300 1.5 250 1 速度誤差 200 0.5 150 0 100 ‐0.5 50 速度推定誤差 [rad/s] 2 ‐1 0 ‐1.5 0 0.5 1 1.5 2 2.5 ‐50 3 t[s] ‐2 加減速時の速度推定誤差 500 0.1 450 0.08 0.06 角度推定誤差 350 0.04 300 0.02 角速度 250 0 200 ‐0.02 150 ‐0.04 100 ‐0.06 50 ‐0.08 0 ‐0.1 0 0.5 1 1.5 2 加減速時の角度推定誤差 34 2.5 t [s] 3 角度推定誤差 [rad] 角速度 [rad/s] 400 5.トルク制御および速度制御 機械系の取り扱い ○機械系の運動方程式 J d M L dt J :系全体の慣性モーメント L :負荷トルク(機械系の損失も含む) ○慣性モーメントの考え方 機械系では慣性モーメントの値が重要。 電動機により駆動される機械系全体について、運動エネルギー E と慣性モー メント J (モータ軸換算、電気系換算)の間には次の関係がある。 E 1 J 2 2 一例として、電気自動車を考え、 減速機の減速比を k 、車両重量(含む乗員)を M [㎏]、 減速機から見て モータ側にある慣性モーメントの合計を J1 [kg・m2] (モータ軸換算)、 車輪側にある慣性モーメントの合計を J 2 [kg・m2] (車軸換算)、 タイヤの半径を r [m]、 車のスピードを v [m/s]とすると、 運動エネルギーの合計は 2 1 1 1 2 2 1 2 1 E Mv J1 J 2 / k J1 J 2 Mr 2 2 2 2 2 k 2 従って、 1 J J1 J 2 Mr 2 k 35 2 ○円柱の中心軸周りの慣性モーメント 内径 r1、外径 r2、重さ M の中空の円柱(均質な材料で出来ている)の中心 軸周りの慣性モーメント J を考える。 r2 r1 中心からの距離の二乗平均が次のように計算できる。 r 2 mean r2 2 r1 r 2rdr / 2 r24 r14 r22 r12 2rdr r2 r1 r22 r12 2 従って J M r 2 mean r22 r12 M 2 ○回転部分の外形や質量から慣性モーメントを推測できる。 ○速度制御のためにも出来るだけ正確な機械系全体の慣性モーメントが必要。 36 速度制御の考え方 ○機械系の運動方程式 J d M L dt d L dt M J ○慣性モーメントや負荷トルクが不明な場合には PI 補償 t M k P k I 0 dt ただし、1)速度指令値はステップ的に変更しない。 その変化率を制限する。 2)誤差積分をリミット、リセットするのなどの対策 ○慣性モーメントが把握できる場合には、次式のような制御も可能。 M J d ˆL k P dt ただし、ˆ L は負荷トルク推定値 ○負荷トルクの推定(外乱オブザーバ) J d ˆ M ˆL dt ˆL k1 ˆ k 2 0t ˆ dt 実システムの関係 J J d M L dt と組み合わせると、 d ˆ k1 ˆ k2 0t ˆ dt L dt ラプラス変換して考えると 37 ˆ ( s ) ( s ) 1 L (s) Js k1 k 2 / s ˆL ( s ) k1 k2 k s k2 L (s) ˆ ( s ) ( s ) 2 1 s Js k1s k 2 この伝達関数より、負荷トルク推定値はステップ及びランプ入力に対して、定 常偏差は零となる。負荷変化が遅い場合には k2 =0 とすることも可能。トルク の制御精度、速度の検出精度が十分であれば、k1 、k2 を大きく選ぶことも可能。 ゲインの設計法の詳細については、前節の検討結果を利用できる。 突極形永久磁石同期電動機の最大トルク制御 ○空間ベクトルを用いて、突極形同期電動機の入力電力を計算してみる。 p t v i v dq idq vd id vq iq rid p Ld id Lq iq id riq Ld id p Lq iq m iq 1 1 r id 2 iq 2 p Ld id 2 Lqiq 2 m Lq Ld id iq 2 2 第1項は銅損、第2項は磁気エネルギーの変化、第3項が出力 従って、極対数を1とすると、モータの発生トルクは M miq Lq Ld id iq ○電流の大きさ i idq が同じ条件で、トルクを最大とする id , ラグランジュの未定乗数法を用いて求めることができる。 L id , iq miq Lq Ld id iq k id 2 iq 2 L id , iq Lq Ld iq 2kid 0 id 38 iq の関係は L id , iq m Lq Ld id 2kiq 0 iq 未定係数 k を消去すると、 mid Lq Ld id 2 Lq Ld iq 2 0 整理すると id im a iq im a 2 2 2 id im a a 2 iq im 2 where a m 2Lq Ld im このパターンに沿って電流を制御すると、同じ電流でも大きなトルクを発生 できる。ただし、電流ベクトルの大きさ idq i の制限値を im とする。 39 電圧および電流の制限を考慮した運転パターンの切り替え ○最大トルク曲線と電流制限の円(振幅を1とする)の交点を求める。 im iq im 1 id 2 id 2 im a iq im a 2 2 2 従って、 id im a id im a 2 1 2 2 2id im 2 a a2 2 2 a i d i m 1 0 i d im 2 iq im 2 1 id im 2 2 a a2 2 1 a2 a a2 2 1 2 2 1 a2 a a2 2 iq im 2 以上の結果より、dq 軸電流の制御範囲は次式で与えられる。 a a 2 2 id 0 2 im 1 a 2 a a 2 2 iq 1 a2 a a2 2 2 2 im 電流制御ではこれらの関係式を満足するよう、電流指令値を制限する必要 がある。 例えば、a m 2 Lq Ld im 1 3 id 0, 2 im 1 の場合を考えると、下記の制御範囲となる。 3 iq 2 im 40 3 2 ○インバータの電圧制限と id , iq の関係(抵抗の影響が無視できる場合) インバータが出力できる六角形の内接円の中に電圧ベクトルの定常値が存 在する条件は次式となる。ただし、抵抗の影響は無視できるものとする。 vd vq Lq iq 2 2 2 Ld id m 2 E d 2 2 なお、インバータの直流電圧を E d とする。この式を id , i q の関係式として 考え、両辺を L d i m で除して、以下のように整理する。 2 2 2 Lq iq id E 2 m m d L i i L i L i d m m d m m d m この結果より、 h 2 Lq Ld 0 Ed 2 b m 2 m とおくと、 Ld im 2 2 id iq 0 b h b im im この式は楕円を表し、楕円の中心は id / im , iq / im b, 0 、長半径(横軸) は b0 / 、短半径(縦軸)は b / h 0 / となり、径は角速度に反比例する。 41 なお、パラメータ a と b の間には次の関係がある。 a m 2Lq Ld im 1 b m 2Lq / Ld 1 Ld im 2h 1 具体例とし、突極比が h Lq Ld 1.5 の場合には a b となる。 以上、電圧制限の条件下では、 id / im を次式のように制御する必要がある。 id i b 0 b h q im im 2 2 さて、この曲線が原点 id / im , iq / im 0, 0 を通るのは、 0 の時である。 また、 1 の時、この曲線が次式で与えられる id 0 im , iq 0 im を通るもの とする。 id 0 a a 2 2 , 2 im iq 0 im 1 a2 a a2 2 2 これらの値が決定されると、次式により 1 を求めることができる。 id 0 b im 2 0 iq 0 b h 1 im 2 1 b 2 i i b d 0 h q 0 im im 2 0 ○トルク最大曲線と電圧制限曲線の交点について 1 0 の場合には、トルク最大曲線と電圧制限曲線が交差する。その 交点は次のように求めることができる。 2 2つの曲線 2 i id b h q 0 b 、 im im 2 2 2 2 i i iq / im を消去すると、 d b h 2 d a h 2 a 2 0 b im im 42 2 id i a q a 2 im im 2 0 2 2 2 id 2 id 1 h 2 b ah 1 b 0 i i m m 整理すると、 2 ここで、 b 2h 1a の関係を用いて、 b を消去すると、 2 b ah 2 2 2h 1a ah 2 2a h 2 2h 2 a 2a h 1 1 2 従って、 2 id id 0 2 2 1 h 2 a h 1 1 12h 1a 0 im im 2 2 これを満足する id の値を id _ とすると、 id _ im a h 1 1 a 2 h 1 1 41 h h 1 2 2 2 2 0 2 1 1 h2 この時の、 iq を iq _ とすると、最大トルク曲線上にあることより、 2 id _ iq _ a im im 2 a 2 iq _ im 2 id _ a a 2 im のように iq _ を求めることができる。 ○電圧制限曲線と電流制限の円との交点 1 の場合には、電圧制限曲線と電流制限の円の交点により最大トルクが制 限される。この場合の交点は以下のように求めることができる。 2 2つの曲線 2 2 2 2 i id b h q 0 b 、 im im iq / im を消去すると、 2 2 i d iq 1 i m im i i d b h 2 d 0 b h 2 im im 43 2 2 2 i id 2 0 2 2 d h 1 2b h 1 b 0 im im 整理すると、 これを満足する id の値を id max_ とすると、 id max_ im b b 2 h 2 1 h 2 1 0 b 2 2 h2 1 この時の iq を iq max_ とすると、電流制限の円の上にあることより、 id max_ im 2 iq max_ im 2 1 iq max_ im id max_ 1 im 2 のように iq max_ を求めることができる。 ○制御プログラムの構成 以上の結果をまとめると、次のような計算手順となる。 準備ステップ1: モータ定数およびインバータの条件より h, a, b, 0 を求めておく。 h Lq Ld 0 Ed 2 b m m a Ld i m m 2Lq Ld im b 2h 1 準備ステップ2:電流制限曲線と最大トルク曲線の交点を求めておく。 id 0 a a 2 2 , 2 im iq 0 im 1 a2 a a2 2 2 準備ステップ3:電圧制限が問題となる角速度 1 を求めておく。 1 b b id 0 / im 2 hi q 0 / im 2 0 制御では、角速度によりとトルク指令により制御パターンを切り替える。 44 ケース1: 1 の場合 最大トルク曲線にそって制御。 id im a a 2 iq im 2 ただし、q 軸電流指令の大きさを制限する。 1 a 2 a a 2 2 iq 1 a2 a a2 2 2 2 im ケース2: 1 0 の場合、 角速度 により次式により、 iq _ をもとめる。 id _ im iq _ im a h 1 1 a 2 h 1 1 41 h h 1 2 2 2 2 0 2 1 1 h2 2 id _ a a 2 im iq _ < iq < iq _ の時は最大トルク曲線にそって、iq max_ > iq > iq _ または iq max_ < iq < iq _ の時は電圧制限曲線にそって運転。 ケース3: 0 max の場合は電圧制限曲線にそって運転。 45 誘導電動機のベクトル制御 三相誘導電動機の基本式は v1 _ dq r1 p j 1 0 r2 p j Lm i1 _ dq r2 p j m Lm i m 一行目より v1 _ dq r1 p j 1 i1 _ dq p j Lm i m 二行目を整理すると p j Lm im j m Lm im r2 i1_ dq im ここで、入力電力を計算する。変形の途中で、上の関係式を用いる。 i1 _ dq v1 _ dq i1 _ dq r1 p j 1 i1 _ dq i1 _ dq p j Lm i m i1 _ dq r1 p j 1 i1 _ dq i1 _ dq i m i m p j Lm i m i1 _ dq r1 p j 1 i1 _ dq i m p j Lm i m i1 _ dq i m j m Lm i m r2 i1 _ dq i m i1 _ dq r1 p j 1 i1 _ dq i m p j Lm i m i1 _ dq i m r2 i1 _ dq i m i1 _ dq i m j m Lm i m 2 2 2 d 1 d 1 2 1 i1 _ dq Lm i m r2 i1 _ dq i m dt 2 dt 2 i m j m Lm i m r1 i1 _ dq i1 _ dq 銅損、磁気エネルギーの変化分を除くと、トルクは次式で与えられる。 m 1 m i1_ dq im jm Lm im i1_ dq im j Lm im ベクトル制御では、励磁電流を基準として(d 軸に合わせて)、一次電流を次 式のように制御する。 46 L d im j i i1 _ dq 1 m' d t r 2 なお、上式では、励磁電流を変化させる場合に二次側に流れ込む電流成分を 一次側から供給するための項も考慮してある。ただし、この項は d 軸成分のみ であるため、次式で与えられるトルクには関係しない。 m Lm im i 一方、基本式の2行目より一次電流を算出すると次式が得られる。 L d L im j m m im i1 _ dq 1 m r2 r2 d t 先の結果と比較すると、 i Lm m im r2 s m r2 i Lm im 以上の結果より、誘導電動機のベクトル制御の流れは 1) 励磁電流 im を設定する。 2) トルク指令 m より、トルク電流 i を計算する。 i m /( Lm im ) 3) すべり角周波数を計算する。 s r2 i Lm im 4) 検出速度とすべり角周波数より、一次角周波数計算する。 m s L d 5) 一次電流指令値を計算する。 i1 _ dq 1 m im j i r d t 2 6) 同期回転座標上で、一次電流制御を行う。 47 6.インバータの電圧制御誤差やパラメータ誤差への対応 デッドタイムによる電圧制御誤差の考え方(前回の復習) ○各相で上下の IGBT が同時にオンしないよう、通常、オン信号の立ち上がり を少し遅らせる。この時間をデッドタイム tdead と呼ぶ。 ○デッドタイムの間は上下いずれの IGBT もオフとなるため、見かけ上、出力 電圧は不定となる。実際には負荷インダクタンスのために出力電流が瞬時に 零となることはなく、IGBT に逆並列に接続されているダイオードを通して 直流電源に還流することになる。 ○スイッチング時の相電流瞬時値が正の場合 上側の IGBT から下側の IGBT への切り替え: 相電流を流している上の IGBT をターンオフすると自動的に下のダイオ ードがオンとなり、出力電圧が Ed/2 から-Ed/2 に切り替わるため、デッ ドタイムの影響は生じない。 下側の IGBT から上側の IGBT への切り替え: 下の IGBT には電流は流れておらず、逆並列のダイオードを通して電流が 流れているため、下の IGBT をオフとしても出力電圧は-Ed/2 のままであ り、上の IGBT をターンオンして初めて出力電圧が Ed/2 に切り替わる。 この結果、キャリア周期 T での平均出力電圧は Ed*(tdead/T)だけ低下する。 ○スイッチング時の相電流瞬時値が負の場合 上側の IGBT から下側の IGBT への切り替え: 上の IGBT には電流は流れておらず、逆並列のダイオードを通して電流が 流れているため、上の IGBT をターンオフしても出力電圧は Ed/2 のまま であり、下の IGBT をターンオンして初めて-Ed/2 に切り替わる。 この結果、キャリア周期 T での平均出力電圧は Ed*(tdead/T)だけ増加する。 下側の IGBT から上側の IGBT への切り替え: 相電流を流している下の IGBT をターンオフすると自動的に上のダイオ ードがオンとなり、出力電圧が Ed/2 から-Ed/2 に切り替わるため、デッ ドタイムの影響は生じない。 ○スイッチング時の相電流瞬時値が零の場合 デッドタイム期間では前の出力電圧が維持されるため、出力したい電圧と は極性がことなるが、2つの切り替えでの平均電圧の誤差がキャンセし、 48 キャリア周期での平均出力電圧誤差は零となる。 ○以上のことを総合すると 1)デッドタイムによる電圧制御誤差はスイッチング時の電流値に依存する。 特に、電流が小さい領域で大ききく変化する。 2)IGBT やダイオードのオン電圧も電圧制御誤差の原因となる。 3)相電圧の制御誤差(指令値電圧-実際の平均出力電圧)は、下図の ようにスイッチング時の相電流瞬時値により定まる。 5 4 3 2 1 0 ‐1 ‐0.5 ‐1 0 0.5 1 ‐2 ‐3 ‐4 ‐5 ○実験による補償パターンの決定 永久磁石同期電動機の2つの相(例えば u 相と v 相)のみに直流電流を流す ため、d 軸方向を u 相軸より w 相軸側に 30 度だけずらし、PI 補償で電流制御 を構成し,d 軸電流のみを流して、電流指令値の大きさを出来るだけゆっくりと 変化させる。 vd rid と id の関係を、 vu riu 2 / 3 vd rid と iu 2 / 3id の関係に変 更することにより、各相の補償パターンを求めることができる。 49 パラメータのオンライン同定の考え方 電流制御の所で述べたように、電流制御を PI 補償により行うと、電流誤差 の積分項は、電圧制御誤差の値に収束する。ただし、二次の Low-pass フィル タが等価的に挿入される問題点がある。ここでは、オブザーバを用いたパラメ ータ同定を永久磁石同期電動機に適用することを考える。なお、簡単のため、 位置および速度はセンサにより十分な精度で検出できているものとする。 突極形永久磁石同期電動機の基本式は v dq ri dq p j Ld id j Lq iq j m また、オブザーバを次のように設計する。 v dq rˆiˆdq p j Lˆd iˆd j Lˆ q iˆq jˆm j Lˆd iˆd id Lˆq iˆq iq た だし、 Ld , i dq などは実際の値、 Lˆ d , iˆdq などは推定値を表す。 電圧制御誤差が無視できるとして、2つの式の差分をとると、 j Lˆ iˆ 0 rˆiˆdq ri dq p j Lˆd iˆd Ld id j Lˆq iˆq Lq iq j ˆm m d d id j Lˆq iˆq iq この式を変形すると、 Lˆ iˆ d d id j Lˆ q iˆq iq r rˆ 1 r0 idq r0 p L Lˆd 1 d Ld 0 p ただし、 r0 , 1 rˆ iˆdq i dq p ˆ 1 m m 0 m p j m 0 p j Ld 0id Lq Lˆ q Lq 0 1 j p j Lq 0iq p m 0 , Ld 0 , Lq 0 はそれぞれのパラメータの基準値を表す。 さて、上の式の左辺はオブザーバで推定した電流および検出電流から算出可 能であり、この値は、右辺が示すように色々なパラメータに誤差があると複雑 50 に変化する。上式を整理すると、次の形に変形できる。 λdq Lq Lˆ q m ˆm Ld Lˆ d r rˆ fr f f Ld f Lq r0 m 0 Ld 0 Lq 0 ただし、 λdq Lˆ d iˆd id j Lˆ q iˆq iq 1 rˆ iˆdq i dq p 1 1 r0 i dq , f j m 0 p p 1 p j Ld 0id , f Ld 1 j p j Lq 0iq p p fr f Ld 次のようなパラメータのオンライン同定を考える。 rˆ kr0 f r λdq dt ˆm k m 0 f λdq dt Lˆd kLd 0 f Ld λdq dt Lˆq kLq 0 f Lq λdq dt drˆ / dt kr0 f r λdq dˆm / dt k m 0 f λdq dLˆd / dt kLd 0 f Ld λdq dLˆ q / dt kLq 0 f Lq λdq 一方、次式のようなポテンシャル関数を考える。 2 2 r rˆ m ˆm Ld Lˆ d U r0 m 0 Ld 0 Lq Lˆ q Lq 0 2 2 この時間変化を求めると、 Lq Lˆ q 1 dLˆ q m ˆm 1 dˆm Ld Lˆ d 1 dLˆ d dU r rˆ 1 drˆ 2 2 2 2 m0 m 0 d t dt r0 r0 d t Ld 0 Ld 0 d t Lq 0 Lq 0 d t r rˆ Lq Lˆ q m ˆm Ld Lˆ d fr f f Ld f Lq λdq 2 k r0 m0 Ld 0 Lq 0 2 k λdq 2 この結果は、提案したパラメータ同定を行うと、パラメータ誤差の二乗和を表 すポテンシャル関数は単調減少となることを示す。 51 52
© Copyright 2026 Paperzz