半導体レーザ
— 複雑系物理と応用 — 静岡大学大学院
工学研究科機械工学専攻 大坪 順次 http://www.sys.eng.in.shizuoka.ac.jp/~ohtsubo1/ 3日目 半導体レーザカオスと応用、 結合半導体レーザネットワーク 5.半導体レーザカオス安定化と計測応用 5-1 半導体レーザの発振線幅の狭窄
5-2 フィードバック制御(強制制御)
5-3 カオス制御の方法
5-4 半導体レーザカオスの制御方法
5-5 戻り光、光注入による安定化
5-6 フォトニック構造
5-7 周期1を使う干渉計測の方法
5-8 干渉計測の具体例
5-9 レーザ端子電圧を用いる計測
5-10 ドップラー計測
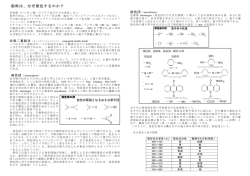
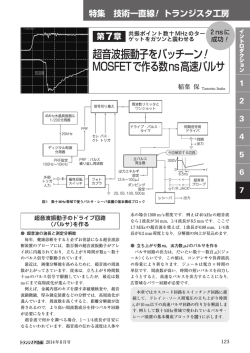
5-11 Chaotic Lidar 半導体レーザの発振線幅の狭窄 半導体レーザの戻り光による安定化 戻り光量(光振幅)によるダイナミクス・カテゴリ I
極微弱戻り光 ~10-7
安定
II 微弱戻り光 ~10-6
不安定
III 弱い戻り光I ~10-4
カオス的
IV 弱い戻り光II ~10-2
カオス的
V 強い戻り光 ~10-1
安定 光強度としては、-40dBくらいから不安定化 半導体レーザは小さい戻り光
により不安定化するが... FEEDBACK COEFFICIENT C
発
振 10
線
幅 0.5
5
戻り光により一旦線幅は小さくなる
↓
10-4くらいから不安定化
↓
10-1を超えると線幅狭窄が起こる LINEWIDTH
[kHz]
戻り光量が多いと安定化する 1
5
10
50
II
I
III
IV
10 MHz 104
103
Phase 0
0º
45º
90º
99.46º
135º
180º
225º
279.46º
/ in(
102
10
10
8
10
7
s
s
=2
tan-1
=0º)
10
6
10
5
FEEDBACK FRACTION r2
帰還光量 10
4
発振線幅の狭窄 カオス領域 25 GHz
Output Power [dB]
0
25 kHz -20
-40
-60
40
60
80
100
Frequency [MHz]
(a)
(b)
(c)
II III IV V コヒーレンス崩壊 安定 安定 120
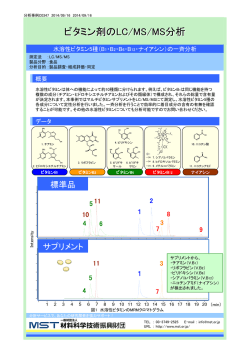
この他、光電検出帰還でも安定化 LD Lens
Fabry-Perot
Interferometer
Laser Diode
Current
Controller
Detector
A
光 光−電気帰還システム 電気 フィードバック制御 通常の制御系 Input
Output
u(t)
System
y(t)
y(t)
dy(t)
= f (y, x) + Ky(t)
dt
Feedback
フィードバック信号は、通常大 €
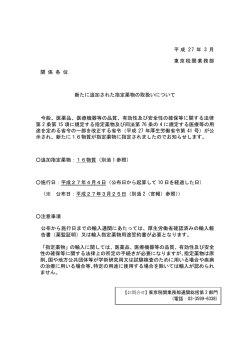
フィードバックには時間遅れがあることも... カオス制御の方法 カオス制御
(a)
xf
xn
カオスは制御できる!
初期状態
(b)
xf (µ0+!µ)
xn
xn : 初期の動作点 xf : ターゲット点 小摂動
vn
(c)
xf
xn
xn+1
es
サドルノードへの制御
カオス制御の例
連続制御
Chaotic System
y(t)
u(t)
y(t)
!"
y(t-$)
$
#
+
dy(t)
= f ( y, x) + K{y(t − τ ) − y(t)}
dt
τe: カオス系に含まれる時間遅延成分 €
フィードバック信号は小さい (信号×~1%) 制御終了時には制御信号は零になる(K=0) カオス制御 €
€
制御信号 u(t) = K{y(t − τ ) − y(t)}
F
2
1
-1
10
0
-10
-20
制御を含むシステム €
dy
= f (y,x) + u(t)
dt
制御が成功すると、u→0 €
制御信号 0
y
システム dy
= f (y,x)
dt
dx
= g(y,x)
dt
制御on カオスから周期へ 0
100
50
150
200
t
250
300
350
400
レスラー・システムの制御例 dy
= f (y,x)
dt
450
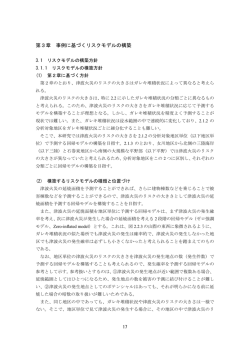
半導体レーザカオスの制御方法 数学的な方法では、事前にすべてのパラメータ値が必要 半導体レーザでは、すべてのデバイスパラメータを知ることは困難 そこで、遅延時間を推定し、その周期の微小正弦波変調(~数%) Occasional Proportional Feedback OPF法という 実際、有効な方法 RIN [dB/Hz]
半導体レーザ戻り光相対雑音RIN (実験)
-130
-140
0.1
1
Optical Feedback [%]
10
戻り光システムにおけるカオス制御
システムにおける安定、不安定モードの計算
不安定サドルノードへのアトラクション
アトラクションの方法は注入電流への変調など
このときの変調は非常に微小(振幅の1%とか)
光ディスクシステムにおけるレーザ高速変調“雑音”抑制のエッセンス 制御可能な不安定サドルノード
ターゲットモード
u(t) = uo {1 + msin(2πf0 t)}
Re[ ] n -1]
小信号変調 ~数% €
Im[!]/2" [GH ]
適当なデバイスパラメータを設定し、小信号解析により振動モードを推定 カオス制御の例
制御前
制御後
アトラクタ
カオス振動が周期に 低周波雑音が低減 制御前
制御後
微小信号によるカオス雑音制御の例
戻り光
制御結果
単独発振
光ディスクピックアップ と光ディスク 光ディスクでは、実際に正弦波変調 ただし、大振幅制御 RIN [Hz-1]
自励発振半導体レーザの戻り光安定性 10-7
10-8
10-9
10-10
10-11
10-12
10-13
10-14
10-15
10-16
103
L=4 cm
L=2 cm
104
105
No Feedback
106
107
108
Frequency [Hz]
109
自励発振は、一種のモード変調 システムに依存して、最適周波数が決まる → カオス安定モード周波数がシステム依存 1010
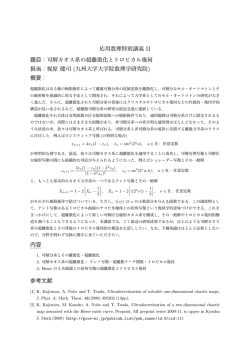
戻り光、光注入によるビーム波形整形 戻り光を用いたBALのビーム整形
partial mirror feedback
1.2
30.0
Intensity [a.u.]
1
0.8
29.8
0.6
0.4
0.2
0
-25
0
25
Stripe Width [µm]
Time[ns]
NFP
Intensity [a.u.]
1
29.6
0
29.4
1.2
29.2
FFP
Intensity [a.u.]
1
0.8
0.6
29.0
-25
0.4
0
Width[µm]
25
0.2
0
-8
-6
-4
-2
0
2
Angle [degree]
4
6
8
時間平均ビームプロファイル
高分解フィラメント発振パターン (NFP)
光注入によるBALのビーム整形
(numerical) J=1.5Jth, rinj=1.2, Δf=0 GHz
1.2
30.0
0.8
29.8
0.6
0.4
0.2
0
-25
0
Stripe Width [µm]
25
Time[ns]
NFP
Intensity [a.u.]
1
29.6
29.4
1.2
FFP
Intensity [a.u.]
1
0.8
29.2
0.6
0.4
29.0
-25
0.2
0
-8
-6
-4
-2
0
2
Angle [degree]
4
6
8
時間平均ビームプロファイル
0
25
Width[µm]
高分解発振パターン (NFP)
レーザアレイの戻り光制御 34
t [ns]
32
制御on 30
28
-30 -20
-10
0
x [ m]
10
20
30
フォトニック構造による安定化 フォトニック構造によるVCSEL空間モード制御
量子ドットBALおけるフィラメント抑制
平均 NFP
理論
平均 NFP
実験
QDも一つのフォトニック構造 フォトニックBAL
(b)
Output power [W]
2.0
60
50
1.5
40
1.0
30
20
0.5
0.0
Patterned
Reference
0.0
0.5
1.0
Current [A]
活性層上面の構造
L-I 特性
1.5
10
2.0
0
Efficiency [%]
(a)
周期1を使う干渉計測
カオス性を含むので本来計測には向かいなが... 限定的範囲で非常にコンパクトな計測器ができる この方法以外に装置化が難しい例 自己混合半導体レーザ振動計 戻り光半導体レーザを自己混合半導体レーザともいう カオス発生直前の周期状態の利用を考える
安定
周期
カオス
ロジステックの分岐例 波長程度の外部鏡変化に対するレーザ出力
Output Power
(a)
!/2
(b)
(c)
戻り光量増加方向
External Mirror Position
外部鏡の速度、振動、変位、絶対位置などが測定できる Normalized Photon Number
周期的変化の例
外部鏡の時間変化
ω0τ [rad]
Normalized Photon Number
(a)
戻り光量増加方向
ω 0τ [rad]
(b)
計算
実験
外部鏡の位置、変位だけでなく、方向までわかる 干渉計測の具体例 戻り光半導体レーザにおけるカオス計測 戻り光による周期1状態の応用計測 l/2周期の振動
・振動 ・変位 ・速度 ・応力 などなど ただし、戻り光量を周期1状態に保つ必要がある。 多モード化すると、λ/4、λ/6・・・の周期振動 計測回路
Laser Diode
Target Reflector
PD
レーザ内部 光検出器 Amplifier
High-Pass
Filter
Discriminator
Monostable
Multivibrator
UP
Monostable
Multivibrator DOWN
Up-Down
Counter
Display
基本的には、フリンジ・カウンティング パルスカウンティングの例
光検出器の出力
パルス出力
変位測定(ΔL) S
S
Monitor PD
S0
S
t
Self-Mixing
Waveform
2
Interferometer
P/I
Characteristic
I
Voltage-Controlled
Y Current Source
Trans-Z
Amplifier
=2kL
Z
Target
Displacement
Laser Diode
S0+SI
/2
L
Servo-FeedbackLoop
VPD
+
A
+
VREF
VOUT
LP Filter
-
L
OUTPUT
L
DC Offset
+
+
-
t
(a)
Compensation Loop
ΔL = N
λ
λ
+ O(λ ) ≈ N
2
2
N: フリンジカウント数 €
現在位置からどれだけずれたか (b)
振動計測
外部鏡の駆動信号
実際の外部鏡振動
絶対位置計測 dS/dt
Δk⋅ 2L
= N + O( N )
2π
€
S
N: フリンジカウント数 電流変調 J → 光(S)変化 = 光周波数変化 応用装置 マイクロ光ディスクヘッド、近接場顕微鏡検出ヘッド 光ピックアップ
ピックアップ
動作原理
戻り光があるときの特性
(実験結果)
レーザ端子間電圧を用いる計測 VCSELやQCLのように内部PDが得られないレーザがある → 戻り光によるダイオード端子間の電圧変化を使う 8
40
Voltage [V]
6
電
圧 30
4
20
2
0
0
10
0.2
0.4
0.6
Current [A]
0.8
電流 Optical Power [mW]
50
光
出
力 0
1.0
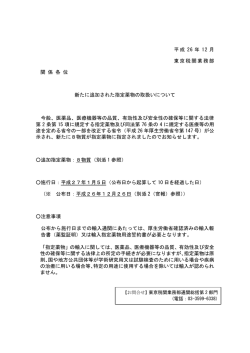
VCSELのLIとLV特性 発振しきい値以上では、光出力と電圧は比例 半導体レーザはダイオード J = J s{exp( βV ) −1} ≈ J s exp( βV ) 、 β = q/ ηkBT
€
€ 戻り光によるキャリア数の変化は、レーザ両端の電圧の関数 n = ns + Δn = n0s exp{β (Vs + ΔV )}
€ キャリア変化(電流=光出力)は、電圧変化に比例 Δn
= exp( βΔV ) −1 ≈ βΔV ∝ J
ns
€
要するに、ダイオードのVI特性 VCSEL戻り光 PZT
30
外部鏡変調 15
0
0
2
4
6
8
10
0.1
外部光検出器 IPD
0
-0.1
0
2
4
6
8
10
VLD
0.02
VCSEL電圧 0
-0.02
0
2
4
6
Time [ms]
8
10
VCSELを使った表面計測 (a) 通常の干渉計測
(b) 外部PD自己混合計測
(c) 自己混合電圧計測 段差のある資料の表面形状 QCLを使った不透明体を通した形状計測 (a)
(b) 1
MTF
(c)
0.5
0
1
1.5
2
0.5
Spatial Frequency [l/mm]
ドップラー計測 自己混合によるドップラービート 時間信号 ×1020
(a)
Photon Number Density [m-3]
5.72
(d)
30.0
20.0
5.71
10.0
5.70
(b)
5.72
0
45.0
(e)
戻り光大 30.0
5.71
15.0
5.70
11.0
0
45.0
(c)
8.00
30.0
5.00
15.0
2.00
0
400
t [ns]
800
1200
0
0
(f)
400
t [ns]
800
1200
ドップラー信号 0 MHz
(a)
散乱体からのドップラービート 1.22 MHz
2.44 MHz
(b)
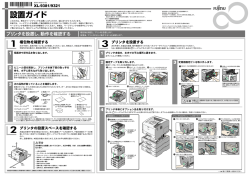
ビート周波数→移動速度 Chaotic Lidar
Chaotic Lidarの構成例 質の良い不規則信号発生器 PBS
HWP
Chaotic
Laser
OI
PD
Target
PD
Correlator
Lidar: Laser Imaging Detection and Ranging 大気観測、公害監視、気象観測など Lidarによる反射体の測定 高分解能 1
3.3 ns (49.5 cm)
Correlation
原信号 0.5
エコー 0.2 ns (3 cm)
0
0
1
2
3
4
5
Delay Time [ns]
6
7
8
Lidar OTDR (Optical Time Domain Reflectometry) にも応用できる
© Copyright 2026 Paperzz