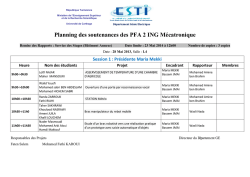
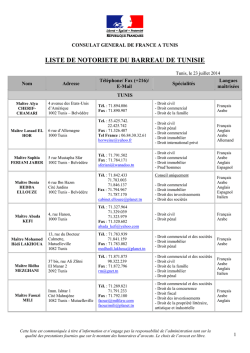
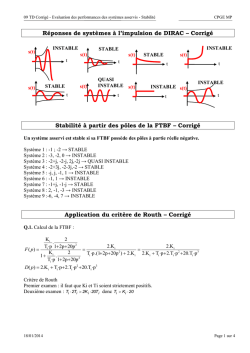
Ministère de l’Enseignement Supérieur, de la Recherche Scientifique Université Virtuelle de Tunis Les systèmes asservis linéaires échantillonnés Stabilité et précision des systèmes discrets Mohamed AKKARI Attention ! Ce produit pédagogique numérisé est la propriété exclusive de l'UVT. Il est strictement interdit de le reproduire à des fins commerciales. Seul le téléchargement ou impression pour un usage personnel (1 copie par utilisateur) est permis. Université Virtuelle de Tunis Les systèmes asservis linéaires échantillonnés Stabilité et précision des systèmes discrets Objectif : Dans ce chapitre on mène une étude sur les deux concepts de base que sont la stabilité et la précision d’un système asservi discret. Les techniques relatives à l’étude de la stabilité d’un système discret y sont largement détaillées. La précision qui est une performance que tout système asservi doit satisfaire en régime permanent et elle fait l’objet d’une attention particulière. 2 Mohamed AKKARI Les systèmes asservis linéaires échantillonnés Université Virtuelle de Tunis Stabilité et précision des systèmes discrets VII-a : stabilité : c’est une condition fondamentale que tout système linéaire discret invariant doit vérifier qu’il soit décrit par une fonction de H 0 ( z) transfert en boucle ouverte X ( k + 1) = F . X ( k ) + G.u ( k ) ou par la représentation d’état et on dit q’un système est asymptotiquement (47) stable si lim x(k)=0 Pour des entrées u (k ) nulles, et quelque soit la valeur de x(0), En effet, l’équation homogène X ( k + 1) = F . X ( k ) conduit par itération à : X (k ) = F k . X (0) , où F vérifie l’équation : ∞ ∑ F k . z −1 = [ zI − F ] −1 . z (48) k =0 La stabilité asymptotique du système se détermine alors soit par : ▪ Le calcul des valeurs propres de F. ▪ Le calcul des solutions de l’équation caractéristique : det zI − F = 0 (49) Si on exploite la fonction de transfert en boucle fermée H f ( z ) = H 0 ( z) 1 + H 0 ( z) dont le dénominateur est 1 + H 0 ( z ) , alors l’étude des pôles conduit à la résolution de l’équation caractéristique D( z ) = 1 + H 0 ( z ) = 0 . Théorème : Un système discret est asymptotiquement stable si : Les valeurs propres de sa matrice F, (lorsqu’il est décrit par une représentation d’état), ou les racines de son équation caractéristique Hf(z), (lorsqu’il est décrit par une fonction de transfert)ont leur module strictement inférieur à un. 3 Mohamed AKKARI Les systèmes asservis linéaires échantillonnés Université Virtuelle de Tunis Stabilité et précision des systèmes discrets Im(p) Im(z) +1 Zone réelle -1 0 0 +1 Réel(z) Réel(p) -1 Fig. 33 : Correspondance entre le plan p et le La figure ci-dessous montre la correspondance entre la plan de stabilité (réel négatif) pour les systèmes analogiques, et le cercle unité centé à l’origine pour les systèmes discrets. Instable +1 -1 +1 -1 Remarque : Pour l’étude de la stabilité, on peut éviter le calcul des valeurs propres de F dans la représentation d’état ou les racines du polynôme caractéristique en faisant appel à : 4 Mohamed AKKARI Université Virtuelle de Tunis Les systèmes asservis linéaires échantillonnés Stabilité et précision des systèmes discrets VII-a-1 : La transformation conforme : w = z +1 z −1 (50) appelée transformation de Mobius qui a comme propriété de transformer le disque unité du plan complexe z en demi plan négatif de la variable complexe w. Dans ce cas, on remplace z dans l’équation caractéristique de Hf(z) par z= w +1 et on applique sur cette équation obtenue en fonction de w, le w −1 critère algébrique de Routh exploité pour les systèmes analogiques. (Voir rappel du critère de Routh en annexe) VII-a-2 : VII-a-2-1 : Le critère de Schur-Jury Il n'est pas toujours facile de calculer les pôles d'une fonction de transfert en boucle fermée, surtout quand celle-ci se présente sous une forme assez développée, le critère de Jury permet l’étude de la stabilité d'un système représenté sans calculer explicitement ces pôles. Il s’applique directement sur l’équation caractéristique 1 +H0(z)= 0 . VII-a-2-2 : Démarches relatives à l’application du critère Soit une fonction de transfert en boucle fermée dont le dénominateur s'écrit : 1 +H0(z)= d(z) = anzn + an-1zn-1 + … + a1z + a0= 0 Le critère de stabilité de Jury est établi alors comme suit : 5 Mohamed AKKARI Les systèmes asservis linéaires échantillonnés Université Virtuelle de Tunis Stabilité et précision des systèmes discrets VII-a-2-3 : Enoncé du critère Le système asservi, représenté par H0(z) est stable si : (51) d(1) > 0, d(-1) > 0 pour n pair, | a0| < d(-1) < 0 , pour n impair (52) (53) |an| Si l’une de ces trois conditions n’est pas vérifiée, le système est instable. Si ces conditions sont vérifiées, alors on vérifie d’autres conditions sur les éléments établis dans le tableau de Jury suivant: VII-a-2-4 : Tableau de Jury z0 6 z1 . . . . . . . . . zn Ligne 1 a0 a1 . . . . . . . . . an Ligne 2 an an-1 . . . . . . . . . a0 Ligne 3 b0 b1 . . . . . . Ligne 4 bn-1 Ligne 5 c0 Ligne 6 cn-2 cn-3 . . …. ….. c0 bn-1 0 bn-2 . . . . . . b0 0 c1 . . …cn-2 0 0 0 0 ……………………………….. Mohamed AKKARI Université Virtuelle de Tunis Les systèmes asservis linéaires échantillonnés Stabilité et précision des systèmes discrets Les deux premières lignes du tableau sont les coefficients de d(z). Les éléments des lignes suivantes du tableau sont définis par : bj = a0.aj - an.an-j; cj = b0.bj - bn-1.bn-j-1. ……… | b0|> |bn-1| …… (54) |c0 |> |cn-2| (55) ……. VII-a-2-5 : Dans les pages suivantes, on présente une pratique de l’exploitation du critère pour les cas particuliers de polynômes de deuxième, troisième et quatrième degré: Cas 1 : polynômes de second degré d(z) = a2z2 + a1z1 + a0 avec a2 > 0 Le critère de Jury impose les conditions suivantes : Condition1 : la0 l< a2 Condition2 : d(+1)= a2 + a1 + a0 > 0 et d(-1)= a2 - a1 + a0 > 0 Ces conditions imposent que les racines soient comprises entre -1 et +1 . Cas 2 : polynômes de troisième degré d(z) = a3z3 + a2z2 +a1z+ a0 avec a3 > 0 Condition1 : la0 l< a3 Condition2 : 7 a20 - a23 < a0a2- a1a3 Mohamed AKKARI Université Virtuelle de Tunis Les systèmes asservis linéaires échantillonnés Stabilité et précision des systèmes discrets Condition3 : d(+1)= a3 + a2 + a1 + a0 > 0 et d(-1)= - a3 + a2 - a1 + a0 > 0 Cas 3 : polynômes de quatrième degré d(z) = a4z4 + a3z3 +a2z2+ a1z + a0 avec a4 > 0 Condition 1: a24 - a 20 < l a0 a3 – a1 a4 l Condition 2: (a0 – a4)2(a0 -a2 Condition : d(+1)= et d(-1)= 8 + a4) + (a1-a3)(a0a3-a1a4) > 0 a4 + a3 + a2 + a1 + a0 > a4- a3 + a2 - a1 + a0 > 0 0 Mohamed AKKARI Les systèmes asservis linéaires échantillonnés Université Virtuelle de Tunis Stabilité et précision des systèmes discrets Evaluation Exercice 1 : Soit un système représenté en continu par sa fonction de transfert en boucle ouverte : H 0 ( p ) = K où K est le gain statique et 1+τ.p τ sa constante de temps. * En prenant Te comme période d’échantillonnage, et un échantillonneur bloqueur d’ordre un, montrer que sa fonction de transfert(boucle ouverte)est de la forme G0 ( z ) = où K (1 − α ) z −α α est un coefficient à déterminer. * Donner l’expression de son équation caractéristique E (z ) * Etablir la condition que doit vérifier K en fonction de Te pour que le système discret soit stable en boucle fermée en appliquant le critère de Jury. Conclure Solution : Avec un échantillonneur bloqueur d’ordre un on a : G 0 ( p ) = B0 ( p ) H 0 ( p ) = G 0 ( z ) = K .Ζ[ Ζ[ 1 − e −Te p K p 1+τ .p 1 − e −Te p 1 1 ] = K (1 − e −Te p ) Ζ[ ] p 1 + τp p (1 + τp ) 1 1 ] = Ζ[ − p (1 + τp ) p 1 1 1 z z ] = Ζ[ ] − Ζ[ ]= − Te 1 1 p z −1 p+ p+ z −eτ τ Comme 9 τ z −1 = e−Te p , alors G0 ( z ) = K .(1 − z −1 )( z z − ) z −1 z − α Mohamed AKKARI Les systèmes asservis linéaires échantillonnés Université Virtuelle de Tunis Stabilité et précision des systèmes discrets Te Avec α = eτ en réarrangeant il vient G 0 ( z ) = K (1 − α ) z −α L’expression de l’équation caractéristique est E ( z ) = G0 ( z ) + 1 = z − α + K − αK = 0 aboutit au polynôme de premier degré en z −α z P ( z ) = z − α + K (1 − α ) = 0 sur lequel on applique le critère de Jury. α p 1 Condition vérifiée. P (1) = (1 + K )(1 − α ) f 0 Condition également vérifiée du fait que K› 0 P ( −1) = K (1 − α ) − (1 + α ) f 0 si K p 1+α 1−α La stabilité du système discret en boucle fermée impose donc un choix de la période d’échantillonnage lié à son gain statique et à sa constante de temps où Te p τLog K −1 pour K< 1. K +1 Exercice 2 : Etudier de la stabilité d’un système décrit par la représentation d’état suivante: X ( k + 1) = F . X ( k ) + G.u ( k ) où F= 1 2 3 4 ; G= ; y (k ) = C. X (k ) 0 1 2 1 C= 1 −1 2 −3 Solution : On calcule les valeurs propres de F : qui évidemment vérifient l’équation : (σ − 1)(σ − 4) − 6 = 0 D’où les deux valeurs propres : σ 1 = 5.37 ; σ 2 = −0.37 On conclut que le système est instable car σ 1 = 5.37 f 1 Exercice 3 : Etude de la stabilité du système discret représenté par le schéma fonctionnel suivant (fig.34) : 10 Mohamed AKKARI Les systèmes asservis linéaires échantillonnés Université Virtuelle de Tunis Stabilité et précision des systèmes discrets X(p) K _ B0(p 1 p Y (p) T Fig.34 : Schéma du système asservi étudié Solution :On commence par discrétiser la fonction de transfert en boucle ouverte : 1 G ( z ) = Z K .B0 ( p ). p 1 T .z G ( z ) = K .(1 − z −1 ).z. 2 = K .(1 − z −1 ). e 2 ( z − 1) p fermée est alors : G f ( z ) = . La fonction de transfert en boucle K .Te G( z) = 1 + G ( z ) z − 1 + K .Te Pour que cette boucle soit stable, il faut que 1 − K .Te ≤ 1 c'est-à-dire 0 ≤ K .Te ≤ 2 donc la période d’échantillonnage Te influe sur la stabilité. Exercice 4 : Etude de la stabilité d’un système discret par usage de la transformation de Mobius : Soit Ε ( z ) = z 2 + a1 z + a 2 = 0 l’équation caractéristique d’un système asservi. Quelles conditions doit vérifier a1 et a2 pour que le système soit stable en boucle fermée? Solution : posons z = w +1 dans Ε(z ) : w −1 E ( w) = (1 + a1 + a2 ) w 2 + 2(1 − a2 ) w + 1 − a1 + a2 = 0 Le critère de Routh impose les conditions suivantes : 1 + a1 + a2 ≥ 0 ; a 2 ≤ 1 ; 1 − a1 + a 2 ≥ 0 11 Mohamed AKKARI Les systèmes asservis linéaires échantillonnés Université Virtuelle de Tunis Stabilité et précision des systèmes discrets Le système est stable que si a1 et a2 sont l’intérieur du triangle suivant : a2 1 -2 -1 1 2 a1 Exercice 5: Un système asservi à retour unitaire est représenté par le schéma bloc suivant : Te Te _ s* (t) B0(p ) 2 p+3 s (t) Quelle condition doit vérifier la période d’échantillonnage T pour que le système discret soit stable en boucle fermée ? Solution : On sait que la fonction de transfert discrète en boucle fermée s’écrit : Ff (z) = F0 ( z ) s( z ) = où e( z ) 1 + F0 ( z ) 2 1 −1 F0 ( z ) = Ζ B0 ( p ) = 2(1 − z ) Ζ p + 3 p ( p + 3) 1 1 1 z z Ζ − = Ζ − = − 3T p ( p + 3) p p + 3 z −1 z − e 12 Mohamed AKKARI Les systèmes asservis linéaires échantillonnés Université Virtuelle de Tunis Stabilité et précision des systèmes discrets Pour que le système soit stable en boucle fermée, il faut que les racines de l’équation caractéristique F0 ( z ) + 1 = 0 soient toutes de module strictement inférieur à 1. Dans notre cas : F0 ( z ) + 1 = 0 ⇒ z − 1.66e −3T + 0.66 = 0 Le système est stable si z = 1.66 .e −3T − 0.661 p 1 donc : 1.66e −3T − 0.66 p 1 qui donne la condition triviale T f 0 Ou − 1.66e −3T + 0.66 p −1 qui donne la condition T p 0.528 VII- b : Précision VII-b-1 :Introduction L’erreur permanente, qui représente l’écart en régime établi entre la consigne et la sortie du système, caractérise la précision du système asservi. A partir d’un schéma bloc représentant l’asservissement d’un système discret muni d’un correcteur R(z) et sans prendre en compte une éventuelle perturbation sur le processus, on mène une étude sur la précision du processus en régime permanent en étudiant la limite de l’erreur e(kT) pour k tendant vers l’infini. e( + Yc(z) R(z) u(z) H(z) Y(z) - Fig. 35 : Schéma d’un système asservi discret compensé 13 Mohamed AKKARI Les systèmes asservis linéaires échantillonnés Université Virtuelle de Tunis Stabilité et précision des systèmes discrets On établit d’abord la fonction de transfert en boucle fermée : Y (z) 1 = Yc ( z ) 1 + R ( z ) H ( z ) et on vérifie la stabilité du système, car la stabilité étant une performance fondamentale, elle doit être assurée en premier lieu. On calcule alors les zéros du polynôme caractéristique : 1 + R ( z ) H ( z ) = 0 ♦ Si ces zéros sont tous à l’intérieur du cercle unité, le système est stable. ♦ On met R ( z ) H ( z ) sous la forme R ( z ) H ( z ) = 1 B(z) , l ( z − 1) A ( z ) (56) Pour mettre en exergue l’existence d’intégrations, de multiplicité l, l est appelé classe du système en boucle ouverte. VII- b-2 : Le gain statique en boucle ouverte peut alors être défini par : G s = lim z→1 ( z − 1) l R ( z ) H ( z ) = B (1 ) A (1 ) ♦ On établit ensuite l’expression de l’erreur e( z) = (57) e( z ) 1 Yc ( z ) 1 + R(z)H (z) (58) Par définition, l’erreur statique est: lim k →∞ e ( k ) = lim z→1 ( z − 1) 1 Yc ( z ) 1 + R(z)H (z) où la consigne est de la forme 14 Yc ( z ) = z z −1 (59) (Echelon unitaire), on aura : Mohamed AKKARI Les systèmes asservis linéaires échantillonnés Université Virtuelle de Tunis Stabilité et précision des systèmes discrets lim k →∞ e ( k ) = lim lim k→∞ e(k ) = z→1 ( z − 1) 1 z 1 = 1 + R(z)H (z) z − 1 1 + Gs (60) 1 A (1 ) (Voir tableau des erreurs en annexe) = 1+ Gs A (1 ) + B (1 ) Evaluation Exercice 1 : Un asservissement à retour unitaire a pour fonction de transfert en boule ouverte : R(z)H (z) = K 0 . 015 z ( z − 0 . 985 ) 3 • Calculer son gain statique. • Calculer l’erreur permanente à une entrée échelon. Exercice 2 : Mêmes questions que dans (1) pour : R ( z ) H ( z ) = 0 . 93 10 − 3 (1 . 23 z + 1 . 21 ) ( z − 1 )( z − 0 . 95 ) Solution : Il suffit d‘appliquer les relations (74), (75), et (76) 15 Mohamed AKKARI
© Copyright 2026 Paperzz