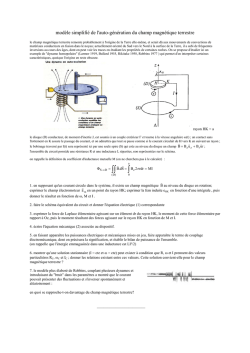
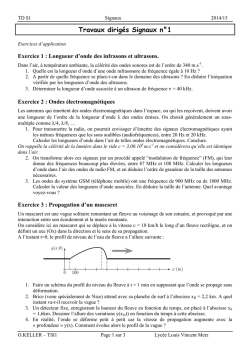
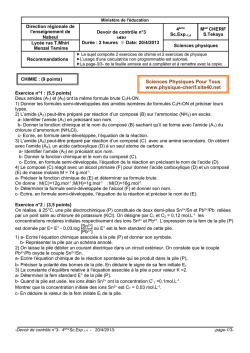
Electromagnétisme et Optique Physique Travaux Pratiques PEIP – 2e année 2013-2014 ELECTROMAGNETISME OPTIQUE PHYSIQUE Rappels de Cours : 1 – Préambule p2 2 – Interférences p3 3 – Diffraction p5 Manipulations : p8 1 – Champs magnétiques créés par les courants p9 2 – Interférences à l’infini : Dispositifs de Fresnel p 13 3 – Interféromètre de Michelson en Ondes centimétriques p 15 4 – Diffraction par des fentes (lumière visible) p 17 5 – Interférences localisées : Anneaux de Newton p 19 5 – Rappels de 1ére année : incertitudes, graphes p 21 1 PREAMBULE A LIRE ABSOLUMENT PREPARATION DES TRAVAUX PRATIQUES Vous devez, avant chaque séance : étudier soigneusement le texte du TP ; faire les calculs préliminaires dans la mesure du possible ; réfléchir à l’introduction et à la teneur du compte-rendu. MANIPULATION - REDACTION DES COMPTES RENDUS La manipulation est faite en binôme, ce qui implique une participation de chaque étudiant à la réalisation pratique et à la rédaction. Prendre soin du matériel qui vous est confié (parfois couteux), ranger la table avant de partir (pensez aux étudiants qui vous suivront), ne pas mélanger le matériel d’une table à l’autre même entre manips équivalentes, font partie du « code de bonne conduite » en TP. Travailler avec soin et intelligence sont les qualités d’un bon expérimentateur. Un compte-rendu de TP est un document autonome, qui se lit sans avoir besoin de se référer au texte du polycope, Respectez la présentation : - titre, - introduction (pourquoi faire ce TP), - paragraphes explications sur chaque mesure, - schémas, - résultats des mesures, en tableaux si possible , graphes - respect et mention des unités, - calculs d’incertitudes, résultats présentés sous la forme« x = m ± m (unit) » ; - remarques sur les difficultés expérimentales , explications complémentaires données par l’enseignant, - conclusion (qu’a-ton appris ? l’expérience est-elle probante ? intéressante ? à améliorer, et comment ?) (Eviter que le CR , hors schémas, fasse moins de 2 et plus de 4 ou 5 pages, et plus d’une faute d’orthographe par ligne...) Pour plus de détails, reportez vous au guide de rédaction qui vous a été distribué précédemment. RESTITUTION DES CR- NOTATION Le compte-rendu est rédigé par binôme (avec les deux noms, le rédacteur souligné) et rendu à la fin de la séance. La même note est attribuée aux deux étudiants. Le travail en trinôme n’est pas admis. La note de TP est attribuée entièrement en contrôle continu. Les TP sont prévus pour une durée de 3h, rédaction comprise. Les sorties avant la fin des 3h ne sont pas souhaitées. Une question complémentaire, « Si vous avez le temps » , peut faire la différence, à qualité de rédaction égale, entre un TP correct et un bon TP. LES NOTIONS CONCERNANT LES CALCULS D’INCERTITUDES, TRACES DE GRAPHES, ETC… RAPPELEES EN FIN DE POLYCOPE SONT CONSIDEREES COMME CONNUES 2 OPTIQUE PHYSIQUE : RAPPELS DE COURS INTERFERENCES Définition Une onde se modélise par une fonction A(x,t), x étant la position dans l'espace (vecteur) et t le temps. Lorsque l'on a deux sources distinctes, deux émetteurs, créant deux ondes A1 et A2, en un point x donné, l'amplitude de A sera : A(x, t) = A1(x, t) + A2(x, t) En physique, on considère classiquement deux phénomènes « idéaux » qui se produisent lorsqu'on mélange deux ondes sinusoïdales : l'interférence quand les deux ondes ont la même fréquence le battement quand les fréquences sont légèrement différentes. Cette approche est justifiée par le fait que toute fonction continue peut se décomposer en une somme de fonctions sinusoïdales (décomposition en série de Fourier). Illustration de l'expérience des fentes de Young Différence de marche – Différence de phase - Interfrange On considère deux ondes de même pulsation mais de phases différentes (cela peut être causé par un trajet multiple de l'onde dans sa propagation) d'expressions : et On peut écrire l'onde résultante sous la forme : Soit le déphasage en x entre les ondes planes issues des sources. Si les deux sources ont la même amplitude A, l'intensité lumineuse en x est : I(x) = 4.A2.cos2/2. Soit, en un point x d’un écran à distance D des sources, : I x 4 A2 cos2 a x D Les franges claires correspondent à ax/ D = k (k entier) ; l’interfrange vaut . D i = D/a . 3 x a D Avec un dispositif optique, (biprisme, miroirs de Fresnel, bilentille...) on forme deux images d'une source lumineuse monochromatique de longueur d'onde : ces deux sources sont synchrones. La distance entre ces deux sources est égale à a. On observe dans un plan parallèle au plan des sources situé à la distance D de celles-ci. Les sources étant synchrones et les deux vibrations lumineuses ayant la même direction, on a des interférences : dans la représentation de Fresnel, il y a addition vectorielle des amplitudes des deux vibrations. Franges d’égale inclinaison – franges d’égale épaisseur On obtient également des interférences lorsqu’une même onde incidente est divisée en plusieurs faisceaux qui suivent des chemins de longueurs différentes avant d’être à nouveau réunis : les déphasages dus aux différences de marche donnent alors également des interférences. Exemple : dispositif de Michelson Une onde incidente est divisée en deux parties à angle droit l’une de l’autre par une lame semi-réfléchissante ; ces 2 ondes sont réfléchies après des parcours respectifs D1 et D2 et se rejoignent après traversée de la même lame ; la différence de marche est =2(D1-D2), elle vaut entre 2 maxima ou 2 zéros successifs ; Dk D0 D2 = D2 - D1 D1 en ajustant , on mesure directement la longueur d’onde spatiale de l’onde. Dans le cas des lames à faces parallèles (a), où l'épaisseur est fixée, la différence de marche (donc l'intensité lumineuse) dépend de l'inclinaison des rayons. On parle de franges d'égale inclinaison, dites franges d'Haidinger. Au contraire, dans des dispositifs tels que le coin d'air (b) ou les anneaux de Newton (c), la différence de marche (donc l'intensité lumineuse) dépend de l'épaisseur (l'inclinaison des rayons est fixée). On a des franges d'égale épaisseur, dites franges de Fizeau. (a) (b) (c) 4 DIFFRACTION La diffraction est le comportement des ondes lorsqu'elles rencontrent un obstacle qui ne leur est pas complètement transparent, et qui réagit en ré-emettant des ondes de même fréquence que l’onde incidente dans des directions différentes de la direction d’incidence. La diffraction se manifeste par le fait qu'après la rencontre d'un objet, la densité de l'onde n'est pas conservée selon les lois de l'optique géométrique. La diffraction par un objet peut être considérée comme le résultat de l'interférence d’ondes de même fréquence, cohérentes, diffusées par tous les points de l’objet. Diffraction par un trou rond Diffraction par un trou carré La diffraction s'observe avec la lumière, mais également avec le son, les vagues, les neutrons, les rayons X (une onde électro-magnétique comme la lumière) ou la matière. Elle est une signature de la nature ondulatoire d'un phénomène. Par exemple, dans le cas de la diffraction des Rayons X par la matière, sous l’effet d’une onde incidente plane, chaque atome entre en vibration et devient la source d’une onde sphérique de même fréquence. Pour observer un phénomène de diffraction, l'obstacle que rencontre l'onde doit avoir une taille caractéristique relativement petite par rapport à la distance à laquelle l'observateur se place. Lorsque l'objet a une structure périodique (réseau), l'objet peut être représenté comme une cellule élémentaire répétée à intervalles réguliers. Le résultat de l'onde est alors la superposition — l'interférence — des ondes diffractées par les différentes cellules (la cellule unitaire étant elle-même composée de points qui diffusent chacun l'onde). Dans l'approche du phénomène, on a donc deux niveaux d'interférences : la cellule unitaire (diffraction par une seule cellule), et entre les cellules (diffraction de l'objet complet). Si l'on considère la diffraction par une couche mince, on a une réflexion de la lumière aux deux interfaces de la couche. La figure d'interférences obtenue (par exemple, les irisations d'une mince couche d'huile) résulte de l'interférence des ondes diffusées par les deux interfaces. Diffraction par une fente La diffraction par une fente est un modèle théorique utilisé pour modéliser les phénomènes de diffraction en optique. ( La diffraction par une fente peut également s'appliquer, pour décrire la figure de diffraction obtenue avec un fil placé sur le trajet d'un rayon lumineux). Une fente est une ouverture de largeur a et de longueur infinie, centrée sur l’origine (la fente s’étend de –a/2 à a/2 dans l’axe des x). Du fait de la symétrie par translation du problème, on ne considère les variations d’intensité que sur un seul axe x. 5 On se place dans le cas où l’écran est situé à l’infini (diffraction de Fraunhoffer), c’est-à-dire que les rayons issus de différents points de la fente, qui arrivent en un même point M de l’écran sont considérés comme parallèles. (Ecran éloigné de plusieurs mètres de la fente) Fente, largeur a M + x a + O H Onde incidente plane, + Distance D longueur d’onde Figure de diffraction de la fente Ces rayons sont en phase au niveau de la fente, mais leur déphasage est différent arrivé sur l'écran. Ils vont interférer, il faut donc calculer le déphasage entre les rayons. Si un rayon parcourt une distance δ entre deux points, la différence de phase introduite par ce chemin étant la longueur d'onde de la radiation lumineuse (monochromatique). est : Si D est la distance entre l'écran et la fente, alors l'intensité I en un point x de l'écran s'écrit : I = Io sinc2 ([ a sin]/) ; à l’infini (onde incidente plane) sin= x/D, d’où : où sinc (sinus cardinal) sinc(x) = [sin(x)]/x. L'intensité a donc pour pseudo longueur d'onde: est la distance entre 2 minima ; le pic central est deux fois plus large que les autres. La fonction sin C décroît rapidement. Noter la différence avec l’interférence de 2 sources ponctuelles, théoriquement non amortie (de fait, s’atténue mais beaucoup plus lentement): I x I 0 . cos2 a x D 6 Diffraction par plusieurs fentes La diffraction par deux fentes, par N fentes ou plus généralement par N objets sera la superposition de la diffraction de l’objet élémentaire et de l’interférence des 2 (ou N) objets. L’amplitude résultante sera la convolution des facteurs de forme dus à chaque étape. Si la dimension caractéristique de l’objet élémentaire (fente) d’une part, et la distance ou période ontre objets, d’autre part, est assez différente, il sera facile de séparer les deux effets et de mesurer les périodes (interfranges) caractéristiques de chaque phénomène. Plus la distance ou dimension de l’objet est petite, plus l’interfrange ou période correspondante est grande (c’est une TF !) Diffraction par une fente de largeur a Diffraction par l’intervalle c entre fentes Cas de deux fentes identiques de largeur a séparées par une distance c : 2 I x I 0 sin ax D 2 c x . cos 2 D a x D Cas de N fentes identiques de largeur a séparées par une distance c : a x N c x sin sin D D I x I 0 . c x a x N sin D D Diffraction par deux fentes amlpitude lumineuse On observe des maxima principaux, séparées par N-2 maxima secondaires. L’intensité des pics secondaires et la largeur des pics principaux diminuent, lorsque le nombre N d’objets diffractants augmente. 2 0,00 0 50 100 150 200 250 abcisse sur l'écran (mm) 7 MANIPULATIONS 8 I – CHAMPS MAGNETIQUES CREES PAR LES COURANTS I- RAPPELS THEORIQUES 1. Le champ magnétique : Le champ magnétique est un champ vectoriel, c'est-à-dire une fonction qui associe à chaque point M(x, y, z) de l'espace et à chaque instant t une grandeur vectorielle caractérisée r par une amplitude, r une direction et un sens (donnés par le vecteur unitaire u parallèle au vecteur B ). En base cartésienne, on note le champ magnétique : B B u B x e x B y e y B z e z B 0 cos t k r .u où B Bx2 B y2 Bz2 et r x e x ye y ze z Les instruments tels que le teslamètre permettent d'effectuer une mesure de la norme du champ magnétique. Cependant, bien que le champ oscille au cours du temps, ces oscillations sont trop rapides pour être détectées à l'aide d'instruments de mesure conventionnels. Le temps de mesure des instruments utilisés étant considérablement plus grand que la période des oscillations du champ magnétique, la valeur de lar norme B du champ mesurée est une moyenne temporelle, égale à la moitié de l'amplitude B0 du champ B . Elle est exprimée en tesla (T). La représentation du champ peut être effectuée à l'aide de vecteurs ou de lignes de champ (cf. figure 1). Ces deux types de représentation permettent de visualiser les variations locales d'orientation du champ magnétique (tangent aux vecteurs et aux lignes de champ) et d'amplitude (proportionnel à la norme des vecteurs et inversement proportionnel à la distance séparant les lignes de champ). Fig. 1 : Représentations 2D du champ magnétique. À gauche : représentation à l'aide de vecteurs dont la norme est proportionnelle à l'intensité locale du champ et dont la direction et le sens sont fixés par ceux du champ magnétique. À droite les lignes de champ (parallèles au champ magnétique en chaque point) permettent de représenter l'orientation locale du champ magnétique. L'intensité est d'autant plus forte que les lignes sont resserrées. N.B. Les lignes de champ créées par un dipôle magnétique sont toujours fermées. 9 2. Champ magnétique créé par des bobines: Le champ magnétique est produit par les charges électriques en mouvement. C'est le cas notamment lorsqu'un courant circule dans un conducteur. Lorsque le conducteur est enroulé et forme une spire, le sens du champ magnétique produit obéit à la règle du tire bouchon (cf. figure 2). Fig. 2 : Règle du tire-bouchon et règle de la main droite permettant de déterminer l'orientation du champ magnétique r B créé par un courant circulant dans un enroulement conducteur. En haut : règle du tire- bouchon. L'enroulement est représenté par un tire-bouchon (attention au sens de l'enroulement). Le courant circulant positivement du manche vers la pointe du tire-bouchon produit un champ r B orienté selon l'axe dans le sens représenté sur la figure. En bas : règle de la main droite. Le sens de l'enroulement doit ici aussi être tel que représenté sur la figure. Le courant entrant dans la bobine par la main droite r produit un champ B orienté vers la gauche. Pour ces deux règles, le changement du sens de l'enroulement r ou du sens de circulation du courant s'accompagne du changement de sens du champ B. La norme du champ créé par une bobine plate (de rayon R très grand devant la longueur L d'enroulement) possédant N spires, dans laquelle circule un courant I, s'exprime : B -6 sp 0 NI 2R expression (1) -1 avec µ0 = 1,25710 T.m.A Pour un solénoïde (bobine pour laquelle L > 10R) possédant N spires, la norme du champ magnétique créé par un courant I est en son centre : B b 0 NI L expression (2) II - MATERIEL ET RECOMMANDATIONS Le matériel à disposition comprend : Une alimentation de tension continue MCP Deux bobines plates (bobines de Helmoltz) mobiles, de rayon R=65 mm. Bobines de Helmoltz Un solénoïde de rayon R=25 mm formé de deux enroulements de 200 spires. L'un des deux enroulements est de longueur fixe (bornes noires). L'autre présente différents connecteurs (bornes rouges) permettant de faire varier le nombre de spires dans lesquelles circule le courant. 10 Un multimètre (A/V/-mètre) Un teslamètre (incertitude relative 5%) Une boussole Les intensités délivrées par le générateur pour effectuer ce TP sont relativement élevées (quelques ampères). Bien que les tensions utilisées soient faibles, de tels courants peuvent provoquer une élévation de température importante des conducteurs et un endommagement irrémédiable des appareils. Il est donc nécessaire d'effectuer les mesures de la norme du champ magnétique assez rapidement lorsque le courant délivré excède 2 A et de couper l'alimentation lorsque les mesures sont finies. Ne dépasser en aucun cas 4 A. Faire systématiquement vérifier le montage par un enseignant avant d'alimenter le circuit. Les courbes et tableaux seront réalisés à l'aide du logiciel Microsoft Excel à disposition sur les postes informatiques, imprimés puis insérés dans le compte-rendu. Représenter les barres d'erreurs sur les courbes. Le teslamètre est un appareil de mesure du champ magnétique. Le dispositif mis à disposition dans ce TP est muni d'une sonde reposant sur le principe de l'effet Hall. Cet effet désigne l'apparition d'un champ électrique (appelé champ de Hall ou champ de modération) lié à la modification de la trajectoire de charges mobiles, soumises à l'action de la force de Lorentz, sous l'effet d'un champ magnétique. La mesure de la différence de potentiel U associée à ce champ de Hall, perpendiculaire à la fois au champ magnétique et à la circulation du courant i dans la sonde, permet de mesurer la norme du champ r magnétique B. r ex et la mesure de U r r s'effectue selon la direction ey , ces deux directions étantr perpendiculaires à l'axe ez de la sonde. La mesure effectuée correspond r donc à la projection de B sur l'axe de la sonde. Afin de mesurer correctement la norme de B , il fautrdonc placer la sonde parallèlement au champ magnétique. r Le signe indiqué, dépend du sens de B (positif si la sonde est orientée dans le même sens que B ). En pratique, pour la sonde fournie, le courant i circule suivant une direction III - ÉTUDE EXPERIMENTALE On alimente le solénoïde long à l'aide du générateur. On utilisera l'enroulement de longueur variable en fixant le nombre de spires à N=200 : utiliser pour cela les deux bornes rouges indiquant 100. Sur le générateur, régler le potentiomètre de tension au maximum et le potentiomètre de courant au minimum. Placer un ampèremètre dans le circuit. Après vérification du montage par un enseignant, augmenter progressivement la valeur de l'intensité jusqu'à ce qu'un courant de 2 A environ circule dans le circuit. 1) Étude quantitative du champ magnétique produit par le solénoïde : Utiliser le montage décrit ci-dessus en respectant la convention d'alimentation donnée par la règle de la main droite (cf. figure 2). 11 1. Placer la sonde du teslamètre au milieu du solénoïde (position 0) et relever les valeurs de la norme du champ magnétique en faisant varier I de 0,5 A à 4,0 A. On prendra une dizaine de mesures (tous les 0,3 A environ). Donner les valeurs mesurées dans un tableau. 2. Tracer la courbe B=f(I). Mesurer la pente de la courbe obtenue et la comparer avec la pente de la courbe théorique déduite de l'expression (2). Discuter le résultat obtenu. 3. Répéter la mesure pour différentes valeurs de N (N=140, 100, 60, 40, 20 et 10) pour un courant fixe de 2,5 A. Donner les valeurs mesurées dans un tableau. 4. Comparer les mesures de B=f(N) aux valeurs théoriques calculées à l'aide des expressions (1) et (2). Discuter les domaines de validité des deux expressions. 2) Étude des bobines de Helmoltz : 1. Alimenter une seule des deux bobines à l'aide du générateur en prenant les mêmes précautions que dans la partie précédente. Placer la sonde du teslamètre au centre de la bobine et relever les valeurs de la norme du champ magnétique en faisant varier I de 0,5 A à 4,0 A. On prendra une dizaine de mesures (tous les 0,3 A environ). Donner les valeurs mesurées dans un tableau. 2. Tracer la courbe B=f(I). Mesurer la pente de la courbe obtenue et en utilisant l'expression (1), en déduire le nombre de spires N de cette bobine.. 3. Placer les deux bobines de Helmoltz l'une contre l'autre. Brancher les deux bobines en série et alimenter le circuit avec un courant de 2,5 A. Mesurer le champ selon différents points de l'axe en déplaçant la sonde entre les positions 0 et 20 (prendre une mesure tous les 2 cm). Répéter les mêmes mesures pour un espacement de 8 cm et 12 cm entre les deux bobines. Donner les valeurs mesurées dans un tableau. 4. Tracer sur un même graphique les courbes B=f(x) pour les 3 espacements choisis. Estimer la valeur moyenne du champ entre les deux bobines et comparer la valeur obtenue avec celle calculée à l'aide de l'expression (2) en considérant l'association des deux bobines comme une seule. Discuter les résultats obtenus. 3) Étude qualitative du champ magnétique : À l'aide des appareils fournis, répondre aux questions suivantes : 1. Déterminer l'orientation du champ à l'extérieur de la bobine en différents points de l'espace. Faites une représentation qualitative des variations d'orientation du champ magnétique dans un plan contenant l'axe de la bobine. 2. Déterminer le sens du champ magnétique à l'extérieur et à l'intérieur de la bobine. Inverser le branchement de la bobine et observer l'effet produit sur le champ magnétique. Discuter ce résultat. 12 II – DISPOSITIFS DE FRESNEL I - Principe Il s’agit de créer deux sources cohérentes ; pour cela, on prend une seule source et on en fait deux images. Deux dispositifs sont classiquement utilisés : les bi-prismes et les bi-miroirs. On utilisera ici un bi-prisme, plus facile à régler. + Sources secondaires S1, S2 + + Laser Faisceau parallèle Lentille de focalisation Source primaire S Dispositif de Fresnel Zone d’interférences Ecran Les deux sources secondaires S1 et S2 sont séparées d’une distance a et situées à peu près dans le même plan que S (en réalité, sur un cercle) c'est-à-dire dans le plan focal image de la lentille L1 placée juste après le laser. Leurs rayonnements interfèrent, on observe les franges obtenues sur un écran (ou mur, ou photo-diode) situé à une distance D des sources. L’interfrange observé vaut = D/a . II- Manipulation 1) Préambule : Mesure des distances focales des lentilles utilisées. Vous disposez de 2 lentilles convergentes, l’une épaisse et de très courte focale, L1, destinée à créer le point source S à partir du faisceau quasi parallèle qui sort du laser, l’autre L2, sert à former une image réelle des sources S1 et S2. Un banc optique supplémentaire, comportant une lampe blanche, un support de lentille, un écran et un miroir, est à votre disposition ; vous pouvez utiliser la méthode de votre choix (autocollimation, objet à l’infini, mesure des distances objet-lentille et lentille-image) pour déterminer la position du foyer image du système L1 et la distance focale de la lentille L2. 2) Mettre le laser en route et régler l’alignement des différents éléments jusqu’à l’obtention des franges d’interférences sur l’écran E. La position du foyer image de L1 est aussi celle du point S servant de source. D’après la configuration du bi-prisme (schéma question 5), les sources secondaires S1, S2 sont considérées comme situées dans le plan perpendiculaire à l’axe et passant par S. ! La distance source S – biprisme ne doit pas changer ente les questions 2), 3) et 5) ! Placer une feuille de papier portant un trait horizontal, sur l’écran ; relever au crayon les positions des franges. Mesurer autant de franges que possible et en déduire la valeur de l’interfrange i. Mesurer D =SE; estimer les incertitudes sur D et i. ! Bien noter que la position de S n’est ni sur la lentille L1, ni sur le bi-prisme, mais au foyer image de L1 ! On donnne vert = 532nm (rouge : 632nm) : en déduire la valeur de a avec son incertitude. 13 3) Pour mesurer plus simplement la distance a entre les sources S1 et S2, on utilise une lentille convergente f’ dans la configuration « objet placé avant la lentille, image réelle agrandie » pour former sur l’écran une image réelle S’1 , S’2 des sources. (voir schéma); on mesure les distances objet-lentille, p et lentille-image, p’ , ainsi que la taille de l’image, a’ et on applique la relation du grandissement : a’ / a = = p’/p pour en déduire a avec le plus de précision possible. On a également: 1/p + 1/p’ = 1/f’ (relation de conjugaison) rappel : calcul de l’incertitude relative sur a : a/ a = a’/ a ‘ + p/ p + p’/ p’ Placer la lentille L2 entre le dispositif de Fresnel et l’écran; la déplacer jusqu’à obtenir une image agrandie et nette des 2 points sources. Déterminer les distances p = sources-lentille et p’= lentilleécran. (La netteté étant difficile à déterminer, vérifier par le calcul, d’après 1/p + 1/p’ = 1/f2) Mesurer la distance a’ entre les 2 points images ; en déduire la valeur de a avec l’incertitude. p’ p S1 S’+1 + O2 + F2 S S2 + + F’ 2 = H’ E S’2 + 4) Comparer dans un tableau les mesures 2) et 3). Commenter. 5) Le biprisme donne de la source S, deux images S1 et S2 dont les positions sont fonction de l’angle du bi-prisme, de l’indice n du matériau le constituant, et de la distance d entre S et l’arête du prisme : la déviation d’un prisme entre point objet et point image, dans l’approximation des petits angles, est =(n − 1); déterminer la relation entre et la distance entre sources, a = S1-S2, en fonction de la distance d et de l’indice n ; S1 + a S + biprisme S2 indice n + d On donne pour ce bi-prisme, n = 1.50 : calculer en fonction de la distance d de votre montage et de la valeur obtenue pour a . 6) Des dispositifs de type bi-miroirs sont à votre disposition ; placez les sur le banc et commentez les figures observées. 14 III –INTERFEROMETRE DE MICHELSON EN ONDES CENTIMETRIQUES I- Principe L’interféromètre de Michelson a pour but la mesure de la longueur d’onde d’une onde électromagnétique à l’aide de franges d’interférences. Pour assurer la cohérence des deux signaux, on procède par division d’onde. Les 2 ondes suivent des parcours respectifs L1 et L2, puis sont superposées et interfèrent. On fixe un des parcours et en faisant varier l’autre, on observe le défilement des franges d’interférences. La différence de marche est = (L1-L2) =2(D1-D2). quand elle vaut le déphasage est 2; en mesurant la variation de entre 2 maxima ou 2 zéros successifs, on mesure directement la longueur d’onde . La précision obtenue sur est celle de la mesure de D1 et D2. Cette manipulation est donc très difficile à réaliser en ondes visibles ( = 0,4 à 0,8 µm) . Elle est bien plus aisée en ondes centimétriques. II- Appareillage R L’interféromètre a pour source une diode « GUNN » de fréquence 10,5 (±0,1) Ghz. Dk L’onde émise est polarisée dans un plan. Le récepteur est également polarisé (voir forme des cornets). L’intensité du signal reçu est traduite en courant mesuré par un milli-ampèremètre. D0 D2 E L’appareil comporte 4 rails gradués articulés autour d’un même axe, deux supports d’écrans réflecteurs et un support central placé au dessus de l’axe, pouvant recevoir une lame séparatrice. d = D2 - D1 D1 III- Manipulation 1) Observation de la Polarisation : Placer l’émetteur E et le récepteur R face à face, cornets parallèles (=0). Mettre en route la diode et l’ampèremètre. Ajuster la distance entre E et R pour adapter l’intensité. Faire ensuite une série de mesures de l’intensité I en variant de 10° en 10° l’angle entre les directions des cornets émetteur et récepteur. R On note I0 la valeur maximale de I : calculer les valeurs = I/I0 (on appelle ceci : « normer » les valeurs) et tracer le graphe normé : = f (). Retrouver que l’expression attendue pour l’intensité IL (carré de l’amplitude !) en fonction de , angle entre antennes émettrice et réceptrice, si l’onde est polarisée linéairement, est IL = ILo cos2 . (a) E 15 Sur le même graphe, tracer L = IL / ILo ; la loi de Malus (a) est-elle vérifiée ? 2) Mesure de la longueur d’onde Réglages : Placer l’émetteur, le récepteur, les réflecteurs et la séparatrice selon le schéma cidessus. Adapter les distances de départ pour avoir un signal aussi intense que possible. Par la suite on fera varier seulement D2, on gardera fixes les autres éléments. Faire varier la distance D2 et observer le défilement des maxima et des minima. Compter un nombre N de franges aussi grand que possible et mesurer sur la règle graduée la distance entre elles; en déduire la longueur d’onde des ondes émises. Evaluer l’incertitude sur la mesure de . Calculer la longueur d’onde théorique d’après la fréquence annoncée par le constructeur. Comparer et commenter. 3) Propagation dans un milieu autre que l’air Avec la même disposition qu’en 2), placer l’écran D2 de façon à obtenir un zéro d’intensité pour les franges. On a donc L2 – L1 = 2 (D2 – D1) = /2 (+ k k entier) Sans modifier la position de l’écran D1, placer devant celui-ci un, deux, puis trois blocs de polystyrène rouge , ou de parafine : On observe un décalage du zéro (déphasage). En effet, le « chemin optique *» parcouru par l’onde qui se réfléchit sur le miroir 1 n’est plus D1 (distance géométrique), mais D’1 , si la vitesse de l’onde change dans le milieu différent de l’air ; pour un aller-retour, L = 2 D . (* Chemin qui serait parcouru par la même onde dans le vide pendant le même temps) Retrouver l’expression liant la variation du chemin optique D = D’1 – D1 parcouru par l’onde, à l’épaisseur e des blocs et à l’indice n de celui-ci , pour l’onde émise par la source : D = (n-1) e Pour trois blocs, déplacer délicatement D2 pour retrouver un zéro d’intensité d’interférences. (Attention ! très sensible !) . On détermine ainsi D = D’2 – D2. R En déduire la valeur (approximative) de l’indice de propagation de l’onde de fréquence 10,5 GHz dans le polystsyrène ou la parafine , et sa vitesse v. Dk D2 D0 (* Dans le vide et l’air, c = 2.998 108 m/s) D’2 E D = D’2- D2 D1 4) Observation de la diffraction par des fentes S’il reste du temps : Placer l’émetteur et le récepteur face à face, oter les miroirs ; remplacer la séparatrice par un écran percé de deux fentes, et déplacer le récepteur autour de l’axe du gonio ; on observe que l’intensité I = f) présente des oscillations en fonction de l’angle ; faire le lien avec les franges d’interférences et de diffractions (voir la diffraction par deux fentes, rappel de cours et TP IV). 16 IV – DIFFRACTION PAR DES FENTES EN LUMIERE VISIBLE I- Principe Au cours de ce TP on s’attachera dans un premier temps à retrouver les dimensions caractéristiques des objets : largeur a d’une fente, distance c entre les deux fentes; on pourra ensuite utiliser le dispositif d’acquisition (si disponible) pour tenter de déterminer l’allure des variations d’intensité des franges. L’intensité reçue sur un écran à la distance D des fentes, en un point écarté de x de l’axe, vaut : 2 2 a x I x I 0 sin D pour 1 fente et . 2 a x D L’interfrange observé vaut . i = D/a I x I 0 sin ax D a x D 2 2 pour 2fentes. . cos c x D dans le 1er cas ; dans le 2e on observe un «double pointillé» dont le pas le plus serré correspond à un interfrange . j = D/c. . II- Manipulation 1) Diffraction par une fente Etude des franges de diffraction Pour une fente simple, l’interfrange i obtenu. mesurer sur l’écran D est la distance entre la fente et le mur, vaut 632nm (laser rouge) ou 532 nm (laser vert) ; en déduire la valeur de a avec son incertitude. Comparer avec la valeur annoncée. (Noter le pic central, plus intense, largeur = 2 i) Mesure directe de la dimension des fentes Placer la lentille convergente entre les fentes et l’écran, de façon à former sur l’écran une image nette de la fente. Mesurer la taille de l’image, les distances fente-lentille et lentille-écran, en déduire la largeur de la fente ; Comparer avec la valeur annoncée et la valeur calculée par l’interfrange. 17 2) Diffraction par 2 fentes a identiques séparées de c Les différents systèmes de fentes sont regroupés sur un cadre type « diapositive ». On comparera des fentes de c largeurs identiques, dans le cas d’une fente simple (largeur a) et de deux fentes (largeur a, séparées de c). c-a Noter que (c) est la distance entre les milieux des fentes, pas l’intervalle entre les bords, qui lui, vaut ( c- a) ! Mesure des d’interférences franges de diffraction a et Placer un couple de fentes dans le faisceau et observer les franges obtenues : on peut distinguer 2 interfranges différents, qu’on notera i et j. Mesurer sur l’écran l’interfrange j. à l’intérieur du pic central de largeur 2 i ; en déduire la valeur de c avec l’incertitude. Comparer avec la valeur annoncée. Si possible, mesurer aussi i et en déduire a . Mesure directe de la dimension des fentes Placer la lentille convergente entre les fentes et l’écran, de façon à former sur l’écran une image nette de la fente. Comme dans le cas d’une seule fente, mesurer les images des largeurs des fentes et de la distance qui les sépare : a’ et c’ ; D’après le grandissement de la lentille, déterminer les grandeurs a et c avec l’incertitude ; 3) Bilan Faire un tableau regroupant les valeurs annoncées, et les résultats pour une seule fente, puis pour deux, d’après les deux méthodes, en précisant les incertitudes ; commentez. S’il reste du temps : D’autres objets diffractants vous sont proposés : trous de diamètres divers, réseaux, etc… On en observera quelques-uns et on fera des schémas et commentaires sur les figures observées. 18 III – INTERFERENCES LOCALISEES : COIN D’AIR – ANNEAUX DE NEWTON Principe On considère 2 surfaces planes semi-réfléchissantes formant un dièdre d’angle faible. A leurs surfaces, se produit une succession de réflexions et réflexions partielles. Les rayons émis dans une même direction produisent des figures d’interférence qui sont situées sur la surface, d’où le terme « interférences localisées ». Une réflexion sur une surface verre-air s'effectue sans déphasage, une réflexion sur une surface air-verre induit un déphasage de 180°. Entre deux rayons successifs, la différence de marche est = 2e+/2 si e est la dimension locale de l’espace entre les deux dioptres. L’intensité des franges trace les lignes d’égale épaisseur. Pour les franges sombres, = (2k+1)/2 (k entier) et e = k /2 ; pour les claires = ket e = (2k-1)/4. Manipulation Pour les deux montages suivants, on utilisera une lentille convergente pour projeter sur un écran les figures d’interférences : on se place dans le cas où les images sont réelles et agrandies, ce qui permet de les mesurer avec une meilleure précision ; une première lentille dite condenseur, est placée entre la source lumineuse et l’objet (coin d’air ou de Newton) pour augmenter la luminosité. lampe condenseur Lentille Coin d’air de projection p’ Ecran S a a’ p On observera les franges parallèles formées par un « coin d’air » (méthode de Tolanski) et les franges circulaires dites « anneaux de Newton. Pour les mesurer plus facilement, on en projette une image agrandie sur un écran, par l’intermédiaire d’une lentille convergente. On choisira les distances objetlentille p et lentille-image p’ pour que l’image soit plus grande que l’objet !! et on appliquera la relation de grandissement des lentilles : A’B’/AB = = p’/p , pour déterminer la taille réelle de l’interfrange ou du rayon des anneaux. 1) Coin d’Air Dans le cas du coin d’air (fig.1), = 2e+/2 peut s’écrire : = 2 x +/2 , x étant la distance de la frange à l’arête du dièdre (ligne de contact des 2 plans) et l’angle du dièdre. L’interfrange vaut i = /2 Mesurer l’image d’une dizaine de franges ; Calculer leur taille réelle et la valeur de l’interfrange i ; En déduire l’angle du coin d’air (incertitude). La longueur d’onde émise par la lampe au Sodium vaut = 589.3±0.3 nm. (1) 19 2) Anneaux de Newton On considère 2 dioptres semi-réfléchissants accolés, l’un plan, l’autre sphérique, qu’on assimile à un coin d’air. On éclaire l’ensemble avec la lampe au sodium. On observe là encore des franges d’égale épaisseur. L’ensemble ayant un axe de révolution, les franges sont des anneaux centrés sur l'axe (2). Soient R le rayon de courbure du dioptre et rk le rayon de l’anneau d’ordre k, on aura : = rk2/R + /2 et k= / et R = (2 rk2)/(2k+1)(franges sombres, k=1.5 , 2.5, 3.5 …) Placer une feuille de papier sur l’écran et régler les distances pour avoir une image nette des anneaux. Reporter et mesurer les rayons r’k des anneaux images successifs ; (mesurer les anneaux sombre, plus nets ; mesurer des diamètres d’ pour être plus précis, en prendre autant que possible, une dizaine par exemple) -- déterminer le grandissement et calculer les rayons rk des anneaux réels; chacun donne une mesure du rayon de courbure R : --reporter les résultats en tableau et En déduire le rayon de courbure R de la lentille de Newton. (Moyenne, incertitude). Il est plus facile de faire l’ensemble des calculs dans un tableau excel, néanmoins ne pas oublier les calculs d’incertitudes ( « à la main »). k 2k+1 0,5 2 1,5 4 … … 9.5 20 d' r R mm mm mètres ……. 20 RAPPELS DE 1ERE ANNEE : INCERTITUDE DES MESURES TRACES DES GRAPHES 21 ECRITURE ET CALCUL DES INCERTITUDES I LECTURE DES MESURES. Les appareils de mesure dans leur grande diversité donne un affichage numérique ou analogique de la grandeur mesurée. Dans les deux cas, il y a une incertitude de mesure due à la précision de l’appareil et à l’exactitude de son calibrage (position du zéro et étalonnage de l’appareil). A cela se rajoute, dans le cas d’un affichage analogique, l’incertitude de lecture. I.1 Affichages numériques. On pourrait être tenté de croire qu’un tel affichage ne comporte pas d’erreur : ceci est FAUX . Cas d’un affichage stable : 8.35 V incertitude sur le dernier chiffre affiché, donc la mesure est au mieux à ± 0.01 V et au pire à ± 0.09 V. Si on dispose de la notice de l’appareil, le constructeur indique la précision de la mesure, qui varie souvent d’un calibre à l’autre. Elle est généralement donnée en % de la mesure, ou en (% de la mesure ± 1 ou 2 « digit » ), ce qui correspond à l’incertitude d’affichage expliquée ci- dessus. L’erreur de calibre et l’erreur d’affichage peuvent être du même ordre de grandeur : auquel cas il faut les ajouter, ou d’ordre différent, auquel cas il faut au moins s’aligner sur la plus grande. (NB : « erreur » pour « incertitude ») I.2 Affichages analogiques. Le principe de l’incertitude due à la précision du calibre existe sur les appareils analogiques de la même façon que sur les appareils numériques. Elle se calcule de la même façon si on dispose des informations du constructeur. A cela se rajoute l’incertitude de lecture. II – ECRITURE DES INCERTITUDES. Par convention, le dernier chiffre d’un résultat numérique est celui sur lequel porte l’erreur ; si on écrit l’incertitude, celle-ci est arrondie à un chiffre, situé à la même précision que le dernier chiffre du résultat. On écrit (grandeur) = (meilleure estimation de la mesure) +/- (incertitude) Ex : 23.4 ± 0.3 cm ; 23.0 ±0.5 cm ; mais PAS : 23 ± 0.5 cm ou 232 ± 20 mm !!! Chiffres significatifs : La notion de chiffre significatif est intimement liée à celle de précision. Plus un résultat contient de chiffres significatifs, plus il est précis. Pour déterminer le nombre de chiffres significatifs d'une valeur, on utilise la convention précédente d'écriture des résultats. Prenons par exemple 10,2. L'incertitude porte sur le dernier chiffre et sa valeur minimale est donc de 0,1. Ecrivons cette incertitude sous la forme d'un chiffre (et non plus d'un nombre), en utilisant la puissance de 10 adéquate : 0,1 = 1. 10-1. Il suffit ensuite d'écrire 10,2 en utilisant la même puissance de 10 : 10,2 = 102 . 10-1. Il faut 3 chiffres pour écrire 102, ce sont les chiffres significatifs. Ex : 0,025 : 0,025 ± 0,001 = (25 ± 1) 10-3 donc : 2 chiffres significatifs. 0,0250 : 0,0250 ± 0,0001 = (250 ± 1) 10-4 donc : 3 chiffres significatifs. Bien que 0.025 et 0.0250 représentent la même valeur, écrire 0.0250 implique une précision 10 fois plus élevée que 0,025. Ecrire un zéro n'est donc jamais anodin... 22 La connaissance du nombre de chiffres significatif est utile lorsqu’on veut écrire une grandeur calculée à partir d’une mesure sans passer par le calcul d’incertitude de cette grandeur. En effet, en première approximation nous pouvons utiliser la règle du report du nombre de chiffres significatif. Ainsi si la mesure de m comporte 5 chiffres significatifs, toutes les valeurs calculées a partir de m comme 1/m, m2… devront être écrite avec 5 chiffres significatif. III - INCERTITUDES ABSOLUES ET INCERTITUDES RELATIVES. L’incertitude absolue est une grandeur du même type que la mesure m ; elle a la même unité (s’il y a lieu). On la note m . Si on ajoute deux valeurs, on ajoute leurs incertitudes. Ex : L1 = 23.4 ± 0.2 cm et L2 = 12.0 ± 0.3 cm : L1 +: L2 = 35.4 ± 0.5 cm Il arrive souvent que l’on veuille comparer l’incertitude à sa mesure ; on parle alors m d’incertitude relative . On la note . m Ex : On pèse m1 = (200 ± 2) g ; m2 = (2 000 ± 2) g ; m3 = (200 ± 2) kg L’incertitude absolue sur m1 et m2 est la même : 2 g ; celle sur m3 est 1000 fois plus grande (2 kg). L’incertitude relative sur m1 est 2/200 soit 1% , l’incertitude relative sur m2 est 2/2 000 soit 0.1% (10 fois plus petite) , l’incertitude relative sur m3 est 2/200 = 1%, la même que sur m1 . IV - CALCUL DES INCERTITUDES . IV.1 Rappels sur la différentielle d’une fonction. A toute fonction dérivable d’une seule variable, y = f(x) , on relie la variation locale de y à la variation locale de x par la forme dite “ différentielle ” , dy = f ’(x) dx . C’est à dire qu’autour de ce point x, on assimile la variation de f(x) avec le produit de la dérivée en x par la variation de x (on “ linéarise ” la fonction f en x). La différentielle s’écarte d’autant moins de la vraie variation de f(x) que l’intervalle dx est petit (tend vers zéro). Ecriture : y = a xn dy = a n x n-1 dx Y = ln (ax+b) dY a dx ax b Pour une fonction de plusieurs variables, on généralise en utilisant les dérivées partielles calculées en supposant une grandeur variable et les autres fixes : Soit f(x,y) : df f x ' ( x , y) dx f y ' (x , y) dy f f dx dy x y IV.2 Utilisation de la différentielle. Lorsqu’un résultat R est obtenu après un calcul utilisant des mesures mi , on doit déterminer l’incertitude sur le résultat en fonction des incertitudes sur les différentes mesures. Selon les cas, il sera plus facile de déterminer l’incertitude absolue R ou l’incertitude relative R / R . Quand les opérations en jeu sont des sommes ou des différences, on utilise les incertitudes absolues. Dans le cas où R s’écrit comme une fonction de plusieurs variables, on utilisera la différentielle pour exprimer la variation sur R à partir des variations mi. 23 Notations : Soit G une grandeur physique. Gm est la valeur mesurée de G. Ge est la valeur ”exacte “ de G (mais forcément inconnue). L’erreur absolue que l’on fait sur une mesure est notée : G = Gm – Ge (G est alors inconnue). L’incertitude sur G, que l’on note G et que l’on prend positive, est la limite supérieure de l’erreur (le pire des cas). Contrairement à G, G peut être estimée. Cas général Supposons que la grandeur physique G soit reliées à d’autres grandeurs physiques x, y, z... par une relation mathématique connue : G = f (x, y, z…). Ce sont les valeurs de x, y et z que l’on mesure expérimentalement et dont on connaît les incertitudes de mesure x, y, z… La valeur de G est obtenue par le calcul (relation mathématique) et l’objectif est de connaître l’incertitude G qui se répercute sur G du fait des incertitudes x, y, z... Les différentes étapes du calcul de G sont les suivantes : G = f(x, y, z…) 1 ère étape : Différencier dG = f’x dx + f’y dy + f’z dz + … avec f’x = f (dérivée partielle de f par rapport à la variable x) x On suppose que l’erreur de mesure est suffisamment petite pour que G dG et donc : G = f’x x + f’y y + f’z z + … 2 ème étape : Chercher le maximum de G G, la limite supérieure de l’erreur prise positive est définie par : G = G max = (f’x x)max + (f’y y)max + (f’z z)max + … = f’x . x max + f’y . y max + f’z .z max + … = f’x . x + f’y . y + f’z . z + … Exemple d’application : 1ère étape : différencier : 2ème étape : majorer G ( x, y , z ) xy dG y G = y z x 1 z x 12 z x 1 2 dx x dy x x y dz x 1 z x 1 24 Cas particulier : « dérivée logarithmique » et incertitudes relatives Dans le cas où la grandeur G apparaît sous forme de produits ou quotients des autres grandeurs, on simplifie beaucoup les calculs en différentiant le logarithmique de G. Soit une fonction G(x, y,z) = xa yb zc , alors Ex 1 : G x =x1 y-1 z-2 2 yz y G x z a b c G x y z Alors on définit F telle que : F ln G ln x ln y 2 ln z F F dx dy x y 1 1 1 dF dG dx dy G x y dF d(ln G ) F dz z 2 dz z dG dx dy 2dz dx dy dz a b c G x y z x y z En écrivant de nouveau : On obtient : G = G max G x y 2z x y z a b c G x y z x y z Cette technique de calcul est à connaitre « par cœur », on l’applique chaque fois que c’est possible (plus rapide que la méthode « générale). Ex 2 : I = RD/a2 , on a : I/I = R/R + D/D + 2 a/a IV.3 “ Estimation ” rapide des incertitudes. Dans certains cas seulement, on peut avoir une idée (généralement par excès) de l’incertitude en calculant Rmax ou Rmin par les valeurs des mi + mi ou mi - mi . Ex : V = 220 ± 3 volts, I = 4.5 ± 0.1 A ; on trouve R = V / I = 48.889 . Que vaut R ? Par les différentielles logarithmiques: V R donc ln R = ln V – ln I ; I dR dV dI R V I d'où : et : R V I R V I R 3 0.1 AN : 0.036 et R = 1.753 = 2 : on écrit R 220 4.5 R = 49 ± 2 Estimation : Vmax 223 V 217 et R min min Imin 4,4 Imax 4,6 R max = 50.68 et R min = 47.17 c’est à dire R max Soit: R = 49 ± 2 25 TRACE ET EXPLOITATION DES GRAPHES I. TRACES DE GRAPHES On rappelle qu’un graphe doit être clair, lisible par tous et compréhensible, en principe, même sorti de son contexte. Les axes sont gradués de façon régulière*. Ils comportent une légende et obligatoirement l’unité. (ex : Pression (Pa), Volume (m3)) L’échelle est choisie pour illustrer le mieux possible les résultas attendus (passage par zéro ou pas, faibles variations autour d’une valeur fixe, etc…). Le titre définit l’expérience plutôt que répéter les intitulés des axes. (ex : « Vérification de la loi des gaz parfaits à température constante » et non « Pression d’un gaz en fonction de son volume », ni « P ( Pa) =f(V)( m3) » ). Les points expérimentaux sont portés proprement, avec la barre d’erreur si possible ; le tracé est fait selon une ligne régulière, sans faire du « point à point » surtout s’ils sont dispersés (mise en évidence de points abberants). Les graphes illustrent un phénomène mieux qu’un tableau de mesures et permettent de vérifier rapidement (visuellement) si une loi physique simple relie les grandeurs mesurées. Les logiciels de simulation sont capables de rechercher l’adéquation entre une série de valeurs et une loi non linéaire. Néanmoins, il est pratique et donc fréquent, de faire des changements de variables lorsque ceux-ci permettent de ramener la représentation graphique à une droite. On appliquera ensuite les techniques de régression linéaire pour déterminer les paramètres régissant le phénomène étudié. Ex : à température constante T, le volume et la pression d’un gaz sont liés par P = (nRT) .1/V , la variation de P en fonction de V est une hyperbole. Si on calcule x= 1/V, le tracé P=f(x) doit être linéaire et la pente vaut (nRT). *Une graduation non linéaire peut remplacer un changement de variable. En particulier, on utilise fréquemment les échelles logarithmiques (sur les 2 axes) ou semi-logarithmiques (sur un seul axe). Ex : PV=nRT donne log(P) = log(nRT)+log(V) ; à T constante, log P = log V + cste ; variation linéaire en log-log : Courant I de décharge d’un condensateur C dans une résistance R en fonctions du temps t : I=Io e (-t/RC) donne ln (I) =( -1/RC) . t + ln(Io) ; le tracé de ln(I) en fonction de t ou le tracé de I (axe logarithmique) en fonction de t(axe linéaire) donne une droite ; le calcul de la pente permet de déterminer la constante RC. Vérification de la loi de Gaz parfaits: Pression en fonction du volume, à température constante 6000 1/V 5500 P (hPa) 13 0,077 5100 20 0,05 3400 30 0,033 2305 40 0,025 1775 50 0,02 1420 55 0,018 1300 Pression (hPa) V (cm3) 5000 4500 4000 3500 3000 2500 2000 1500 1000 10 Vérification de la loi des Gaz parfaits: Pression en fonction du volume à température constante 10000 Pression (hPa) 30 40 50 60 Volume (cm3) Verification de la loi des gaz parfaits : Pression en fonction de l'inverse du volume à Temperature cste 6000 5000 20 Pression (hPa) 4000 3000 2000 1000 Inverse du volume (cm-3) 1000 10 Volume (cm3) 100 0 0,000 0,010 0,020 0,030 0,040 0,050 0,060 0,070 0,080 26 II. REGRESSION LINEAIRE De nombreuses quantités physiques sont reliées par des conditions du type y=ax+b. Par des expériences, on arrive à connaitre des couples (xi,yi), et on cherche à déterminer a et b. En général, en raison des erreurs de mesure, les points (xi,yi) ne sont pas alignés, mais sont "presque" sur une même droite. Il faut alors choisir a et b de sorte que la droite soit la meilleure possible. Pour cela, il faut choisir une mesure de l'écart entre une droite y=ax+b et le nuage de points expérimentaux (xi,yi). On choisit en général le carré de la différence entre le point théorique et le point expérimental, c'est-à -dire (yi-(axi+b))2. L'écart total est donc : Effectuer une régression linéaire, c'est trouver la droite qui minimise l'écart précédent, c'est-à -dire la somme des carrés des différences : on parle de droite des moindres carrés. Un minimum d'une fonction de plusieurs variables ne peut se produire qu'en un point où les dérivées partielles s'annulent, c’est à dire: On a un système linéaire d'ordre 2 en a et b à résoudre, et on trouve : Ces formules sont en général directement implémentées dans les calculatrices ou les tableurs. Ex : La tension U aux bornes d'une batterie de force électromotrice E et de résistance interne R est U = E- RI. On a procédé à différentes mesures : Intensité mesurée (A) : 0 0,1 0,4 1 Tension mesurée (V) : 12 11 7 1 La régression linéaire donne y = a x + b avec a =- 11.7 et b = +11.9 , soit E=11,9 Volts et R=11,07 Ohms. 27 III . METHODE DES MOINDRES CARRES 2.1 Principe Bien sûr, toutes les quantités physiques ne sont pas linéaires. On peut parfois s'y ramener si l'évolution est exponentielle (comme dans l'étude d'une population) en prenant le logarithme, ou si l'évolution est logarithmique (comme pour une étude de pH) en prenant l'exponentielle. Mais ce n'est pas toujours le cas... Lorsque la dépendance entre y et x est régie par une fonction f, où f dépend de certains paramètres, la méthode des moindres carrés consiste à trouver les paramètres pour minimiser où les (xi,yi) sont les points expérimentaux. On réalise ensuite le même type d'étude que pour le cas linéaire. 2.2 Ajustement par moindres carrés sous « Excel » Cas d’une relation linéaire : y = a x + b Une fois les valeurs entrées sous forme de tableau, sélectionner la zone des cellules contenant les données ; Utiliser « Insertion graphes », puis, sur le graphique obtenu, sélectionner les points de données ; utiliser (clic droit) « Insérer une courbe de tendance » , « linéaire » et « Afficher l’équation de la courbe » On obtient le résultat ci-contre ! Excel calcule vite et bien mais ne réfléchit pas à votre place : vous devez comprendre les valeurs qui sont données dans l’équation de la courbe de tendance, réfléchir aux unités, à la précision (écart entre les points de mesure et la droite de tendance), etc…. On peut également obtenir les valeurs de a et b sans faire tracer la droite : Si: - Les valeurs x sont dans les cellules A1 à A8 - Les valeurs y sont dans les cellules B1 à B8 >> a se calcule avec la formule =DROITEREG(B1:B8;A1:A8) >> b se calcule avec la formule =MOYENNE(B1:B8)- DROITEREG(B1:B8;A1:A8)*MOYENNE(A1:A8) NOTE : l’utilisation d’Excel ou tout autre logiciel pour tracer les graphes ne dispense pas d’écrire les légendes des axes, les unités et le titre du graphique. 28
© Copyright 2026 Paperzz