DS7-2013_corrigé.doc (version: 27/03/14)
DS7-2013_CORRIGE
« Bras manipulateur auto équilibré»
Ce sujet est très inspiré par le sujet de concours ATS 2007
Présentation générale.
Contexte et marché.
Les entreprises industrielles travaillent constamment à l’amélioration de la productivité et de la rentabilité. Sur des opérations de
manutention, positionnement, montage, à faible cadence, l’automatisation à outrance et les cellules robotisées ne sont pas rentables…
Les systèmes d’aide à la manutention sont un compromis intéressant. En effet l’employeur maintient une activité humaine
(conservation d’emploi) tout en limitant la pénibilité donc en améliorant les conditions de travail, pour des coûts d’investissement
modestes.
Il existe différentes familles de systèmes d’aide à la manutention :
Potence,
Pont roulant,
Bras manipulateur…
C’est ce dernier type de système d’aide à la manutention que l’on se propose
d’étudier. Plus particulièrement un matériel développé, fabriqué et distribué par la
société SARRAZIN.
Principe.
La charge est suspendue en bout de bras à un système de préhension ou préhenseur.
Le poids de la charge à manutentionner est équilibré par le bras, l’utilisateur
accompagne la charge dans son déplacement… dans
la limite des courses disponibles. Les seuls efforts à
fournir sont ceux nécessaires à vaincre les
frottements et les effets d’inertie. Lorsque
l’utilisateur lâche la charge, elle doit rester stable en
position dans l’espace.
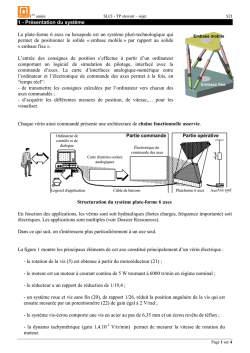
Bras manipulateur étudié.
Le manipulateur étudié est constitué :
D’un système de préhension, défini sur
mesure en fonction de la charge à
manutentionner.
D’un bras articulé (cinématique brevetée).
D’une tête en liaison pivot d’axe vertical
par rapport à la colonne support,
D’un actionneur pneumatique (ou
éventuellement électrique) implanté dans
la tête,
D’une colonne support scellée au sol pour
l’installation sur pied. Il existe aussi des
versions suspendues à la charpente ou
lestées autostables ne nécessitant pas
d’ancrage au sol.
Les mobilités autorisées au niveau du bras et de la colonne permettent à l’utilisateur d’atteindre tout point de l’espace, dans la limite
des courses disponibles. C’est l’action de l’utilisateur sur la charge (ou le préhenseur) qui provoque son mouvement. On parle de
système d’aide à la manutention.
C. Gabrion (mars/14)
page 1/8
C. Gabrion / DS7-2013_corrigé.doc (version: 27/03/14)
page 2/8
Utilisation.
Un cycle type d’utilisation du système d’aide à la manutention peut se décomposer de la manière suivante :
Assister l’utilisateur pour le déplacement du préhenseur (suspendu en bout de bras) à vide jusqu'à proximité de la charge,
Assister l’utilisateur pour le positionnement et l’orientation du préhenseur pour saisir la charge,
Prendre la charge avec le préhenseur,
Assister l’utilisateur pour le déplacement de la charge maintenue par le préhenseur,
Assister l’utilisateur pour le positionnement et l’orientation de la charge pour la dépose,
Dépose de la charge,
Assister l’utilisateur pour le retour du préhenseur à vide pour le cycle suivant.
Certains mouvements de prise, de dépose ou d’orientation au niveau du préhenseur peuvent être motorisés, les autres étant provoqués
par l’utilisateur.
Fonctionnement du bras manipulateur.
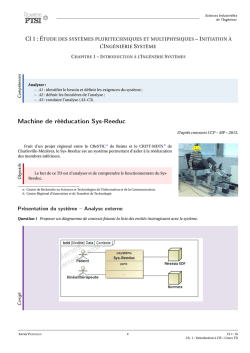
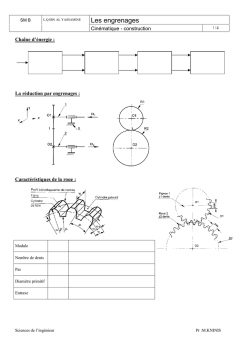
Etude de la cinématique du bras articulé.
La cinématique du bras manipulateur seul (sans l’articulation d’axe vertical) est donnée sur la figure 3. Elle est similaire à celle d’un
pantographe. D’un coté la charge suspendue (au point H), de l’autre l’effort d’équilibrage développé par l’actionneur et appliqué au
point D.
Le bras est constitué de 4 classes d’équivalence ou sous ensembles fonctionnels (sans compter la tête qui est représentée ici par le
bâti). A savoir :
Barre FC : Bras porteur,
Barre CD : Biellette arrière,
Barre ED’ : Bras de reprise,
Barre HE : Bras flèche.
Les liaisons en C, D’, E et F sont des liaisons pivot d’axe perpendiculaire à la feuille. Ces 4 articulations forment un parallélogramme
déformable. Au point B, le bras est en liaison pivot avec la tête du manipulateur (représentée ici par le bâti).
Autres propriétés géométriques importantes :
HFB est un triangle isocèle,
Les points H, B et D restent constamment alignés quelque soit l’orientation du bras.
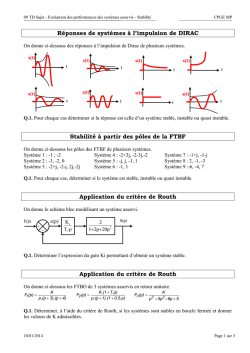
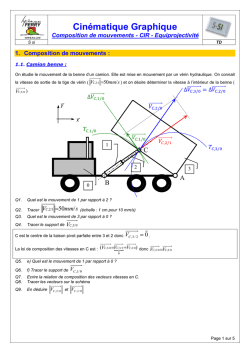
Auto équilibrage pneumatique.
L’actionneur pneumatique est implanté dans la tête.
L’extrémité de sa tige est en liaison mécanique avec
le bras au point D.
L’action mécanique de la pression p établie dans le
vérin équilibre la charge suspendue en bout de bras.
Cette pression, dite d’équilibrage, est réglée par
l’utilisateur et régulée par le régulateur de pression de
précision.
Si l’opérateur exerce sur la charge un effort vers le
bas pour la faire descendre, la tige du vérin est tirée
page 3/8
vers le haut par l’intermédiaire du bras. L’air emprisonné dans la chambre 1 est en légère surpression donc le régulateur évacue le
surplus d’air pour maintenir la pression d’équilibre. Lorsque l’opérateur lâche la charge, elle reste en équilibre.
Le principe est similaire pour faire monter la charge.
Ce système permet donc d’avoir une charge stable dans l’espace et déplaçable moyennant de faibles efforts, liés à l’inertie et aux
frottements. Le distributeur 2/2 est un organe de sécurité. En effet en cas de coupure d’alimentation pneumatique, la charge ne doit pas
tomber sur l’utilisateur. Le distributeur 2/2 normalement fermé bloque l’air dans la chambre 1 du vérin et évite la chute brutale de la
charge.
C. Gabrion / DS7-2013_corrigé.doc (version: 27/03/14)
Partie 1 : Etude cinématique.
Cette partie doit nous permettre de mieux comprendre le fonctionnement du bras manipulateur.
1. Tracer le graphe de liaisons du bras seul à partir du schéma cinématique proposé en figure 3.
Pivot d’axe (E,z)
Barre ED’
Pivot d’axe (D’,z)
Barre HE
Barre CD
Pivot d’axe (C,z)
Pivot d’axe (F,z)
Barre FC
Pivot d’axe (B,z)
2. Exprimer le rapport des longueurs HB/BD en fonction de HF et CD. Ce rapport est indépendant de
l’orientation du bras. Pour la suite il sera appelé
rapport d’homothétie, il sera noté k ; en pratique
7<k<10.
D’après le théorème de Thalès :
HB HF
=
BD CD
3. Si le point D décrit une surface rectangulaire (zone
1 sur la figure 5 du document réponse DR1), définir
à l’échelle et caractériser sur le document réponse
DR1 le lieu des points H. Les esquisses de
construction seront soigneusement représentées.
Par construction :
12.8
HB HF
=
=k=
= 3.05
BD CD
4.2
Par homothétie la forme rectangulaire est conservée.
Une étude statique de ce bras manipulateur,
permet de comprendre que pour une charge
constante en bout de bras, un effort constant
vertical au point D permet d’équilibrer la charge
dans toutes les positions permises par la
cinématique du bras.
On souhaite proposer une architecture pour
l’implantation du vérin pneumatique exerçant
l’effort d’équilibrage au point D. La figure 6 cicontre définit partiellement cette implantation.
C. Gabrion / DS7-2013_corrigé.doc (version: 27/03/14)
page 4/8
4. Compléter les tableaux sous les quatre solutions proposées sur le document réponse DR1.
Partie 2 : Actionneur électrique.
Dans cette partie, nous allons envisager le remplacement du vérin pneumatique par un vérin électrique.
On souhaite proposer une version électrique de l’actionneur permettant d’utiliser ce manipulateur dans des lieux n’ayant pas de réseau
pneumatique. La figure 7 du document réponse DR2 donne un schéma cinématique incomplet du vérin électrique. Le corps du vérin et
le stator du moteur électrique constituent le solide S0, un pignon moteur (Z1) est solidaire de l’arbre moteur S1, un arbre secondaire
S2 est muni de deux roues dentées (Z21 et Z22), un arbre tertiaire S3 est muni de deux roues dentées (Z31 et Z32), un satellite S4 (Z4)
permet de transmettre le mouvement de rotation à une vis S5 et finalement un système vis/écrou permet à la tige du vérin S6 de
translater par rapport à S0.
page 5/8
C. Gabrion / DS7-2013_corrigé.doc (version: 27/03/14)
5. Compléter le schéma cinématique du document réponse DR2 pour faire apparaître le système vis-écrou et
garantir le bon fonctionnement de cet actionneur. Il est possible de définir de nouveaux solides si nécessaire.
Z21
S4
S2
Z22
S5
Z4
S1
Z1
S6
Z32
Z31
S3
Z0
S0
6. Déterminer le rapport de transmission R =
ω5
en fonction des nombres de dents des différentes roues.
ω1
Ce réducteur est composé d’un train à axes fixes et d’un train épicycloïdal, on peut décomposer le rapport de
ω5 ω5 ω3
=
×
transmission : R =
ω1 ω 3 ω1
ω5
Z 32
ω 3 Z1× Z 22
Avec
=
et
=
ω 3 Z 32 + Z 0
ω1 Z 21× Z 31
On en déduit : R =
Z 32
Z1 × Z 22
×
Z 0 + Z 32 Z 21 × Z 31
Le rapport de transmission du réducteur est R = 0,12, le pas de la vis est p = 3 mm/tr et le rendement global de ce vérin est
de µ = 0,7 . Le point de puissance maximum retenu pour le moteur électrique est N = 12000tr/min avec un couple de C = 0,40 Nm.
7. Déterminer, dans ces conditions, l’effort développé par le vérin et sa vitesse de sortie.
Dans la chaine cinématique de ce vérin, le rendement n’affecte que la transmission des efforts. On peut donc en
déduire la vitesse de rotation de la vis S5 : N 5 = R.N = 0,12 × 12000 = 1440 tr / min
Connaissant le pas de la vis, on peut en déduire la vitesse de translation de la tige S6 :
p.N 5 3 × 1440
V6 =
=
= 72 mm / s
60
60
Le rendement exprime le rapport de puissance de cette chaine d’énergie : µ = 0,7 =
Pvérin
Pmoteur
Pvérin = F 6.V 6
π .N .C
Avec :
Où F6 est l’effort développé par le vérin. ⇒ Pvérin ≈ 351 W
Pmoteur =
≈ 502 W
30
µ .π .N .C 0,7 × 3,14 × 12000 × 0,4 10550
≈
≈
≈ 4880 N
On en déduit l’effort développé par le vérin : F 6 =
30.V 6
30 × 72 × 10 −3
2,16
page 6/8
C. Gabrion / DS7-2013_corrigé.doc (version: 27/03/14)
Partie 3 : Etude statique.
Dans cette partie, nous allons déterminer l’effort demandé au vérin et les efforts dans l’articulation entre le bras et la tête.
Le poids de la charge au point H est noté Mg et l’effort développé par l’actionneur est noté Fv. Le poids des différentes barres est
négligé et les différentes liaisons seront considérées comme parfaites.
Quelque soit la position du point H, sa position est définie par le vecteur unitaire
u=
HD
.
HD
8. En isolant l’ensemble des 4 barres, montrer que : Fv = -k.Mg
On isole les 4 barres (HE – FC – ED’ – CD), cet ensemble est soumis à 3 actions mécaniques extérieures :
0 0
0
- Le poids de la charge (-Mg) en H : {T ( g → HE )}= − Mg 0= − Mg
0
0 B 0
H
0
uur
ur
- L’effort dans l’actionneur ( Fv = Fv y ) en D : {T (vérin → CD )}= Fv
D
- Actions dans le pivot
r
d’axe ( B, z ) :
0
0
BH .Mg. cos( X , u )
0
0 0
0
0= Fv
0
0 B 0 BD.Fv. cos( X , u )
XB LB
{T (tête → FC )}= YB MB
ZB 0
B
PFS au point B :
XB = 0 eq.1
− Mg + Fv + YB = 0 eq.2
ZB = 0 eq.3
LB = 0 eq.4
MB = 0 eq.5
BH .Mg . cos( X , u ) + BD.Fv. cos( X , u ) = 0 eq.6
r
Equation des moments sur l’axe ( B, z ) : eq.6 ⇒ BD.Fv + BH .Mg = 0
On en déduit : ⇒ BD.Fv = − BH .Mg ⇒ Fv = −
BH
Mg d’où Fv = − k .Mg
BD
9. En déduire les composantes du torseur de la liaison pivot d’axe (B,z) entre la tête et le bras porteur (barre
FC).
0
0
Les 5 autres équations donnent directement : {T (tête → FC )}= Mg (1 + k ) 0
0
0
B
page 7/8
C. Gabrion / DS7-2013_corrigé.doc (version: 27/03/14)
Y
Partie 4 : Modification.
Dans cette partie, nous allons envisager de modifier ce manipulateur pour le rendre
autonome pour les opérations répétitives.
Pour déterminer les mouvements effectués par ce manipulateur, on place deux capteurs,
respectivement sur les barres BF et FH, pour mesurer les angles α et γ définis sur la figure 3.
Attention, pour la suite des calculs, on considérera le paramètrage de la figure ci-contre. Les
dimensions seront notées BF = FH = a
10. Exprimer les coordonnées cartésiennes du point H dans le repère
R(B, x, y, z) en fonction de a et des deux angles.
− a. sin α − a. cos γ
BH = BF + FH = a. cos α + − a.sin γ
0
0
sin α + cos γ
⇒ BH = − a sin γ − cos α
0
α
Y1
X1
α
F
B
X
Z
Y
Y2
γ
X2
γ
Z
F
X
H
11. Calculer le vecteur vitesse du point H / R.
V ( H ∈ HF / R) = V ( F ∈ HF / R) + HF ∧ Ω( HF / R)
V ( H ∈ HF / R) = −aα& X 1 + a X 2 ∧ γ&.Z
V ( H ∈ HF / R) = − aα& X 1 − aγ&.Y 2
12. Calculer le vecteur accélération du point H / R.
d V ( H ∈ HF / R)
Γ( H ∈ HF / R) =
dt
R
(
)
Γ( H ∈ HF / R) = − aα&& X 1 − aα& ²Y 1 − aγ&&.Y 2 + γ&.Z ∧ − aγ&.Y 2
Γ( H ∈ HF / R) = − aα&& X 1 − aα& ²Y 1 − aγ&&.Y 2 + aγ& 2 . X 2
On souhaite écrire un programme sous SCILAB pour déterminer la cinématique du point H / R à partir des données fournies par les
deux capteurs. Une ébauche du programme est donnée sur le document réponse DR2. La première partie du programme permet de
récupérer les données des capteurs dans un fichier de type csv et de les stocker dans trois vecteurs à n composantes :
• Alpha = [les n valeurs de l’angle α en radian]
• Gamma = [les n valeurs de l’angle γ en radian]
•
Temps = [les n valeurs de temps en ms]
13. Compléter le programme, sur le document réponse DR2, pour calculer et stocker les coordonnées
cartésiennes du point H / R dans deux vecteurs à n composantes : « XH » et « YH ».
14. Poursuivre l’écriture du programme pour calculer les vitesses et les accélérations angulaires ( α& , α&&, γ&, γ&& ) et
les stocker dans les vecteurs à n composantes suivants : « Alpha_p » ; « Alpha_pp » ; « Gamma_p » ;
« Gamma_pp ».
Rechercher la valeur maximale de α& et la stocker dans une variable : « Max_Alpha_p ».
Afficher cette valeur à la console.
page 8/8
C. Gabrion / DS7-2013_corrigé.doc (version: 27/03/14)
Q. 13
Q. 14
© Copyright 2026 Paperzz