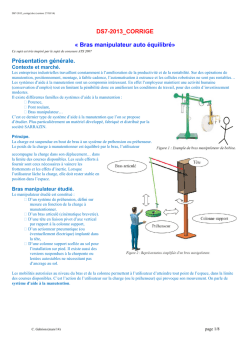
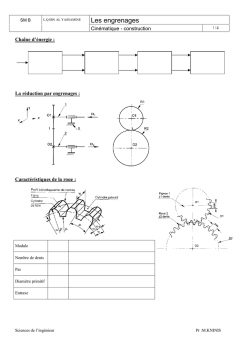
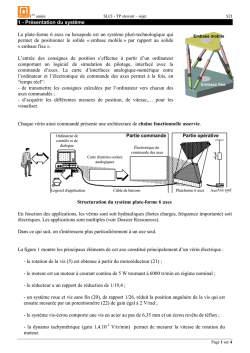
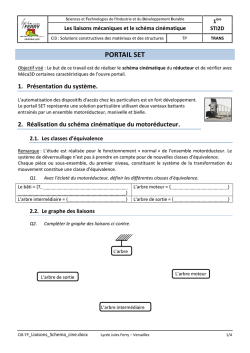
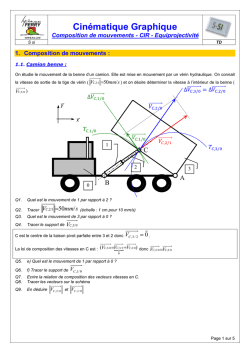
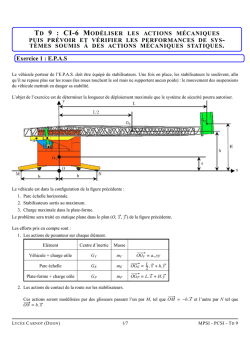
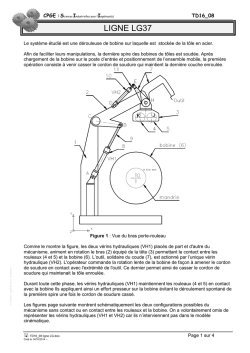
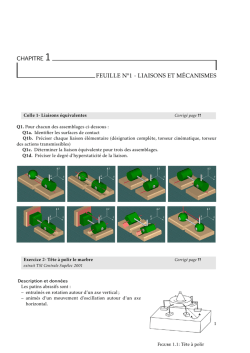
PCSI Sciences de l’Ingénieur DS de Sciences de l’Ingénieur, PCSI, avril 2014 Durée : 1h Exercice 1. Corrigé sur le site : http://perso.numericable.fr/starnaud/ Liaison équivalente Soit le repère orthonormé direct R ( O, x , y , z ) et le point A tel que OA l. x y avec le solide (0). Un solide (1) est au point O en liaison rotule (sphère sphère) avec un solide (0) et au point A en en liaison ponctuelle (sphère plan) de normale Questions 1. Réaliser schéma cinématique dans le plan (O, x , y ) . 2. Déterminer par calcul le torseur cinématique de la liaison équivalente au point O entre les 2 solides (0) et (2). 3. Donner le nom et les caractéristiques géométriques de cette liaison. 4. Représenter la schématisation normalisée de cette liaison dans le plan. Exercice 2 : Frein de TGV Duplex (Centrale PSI 06). Le dispositif de freinage de TGV est principalement constitué : d’un support, de deux garnitures, de deux biellettes, de deux leviers actionnés par un vérin pneumatique. Le bon fonctionnement du freinage impose le contact entre le disque et toute la surface des garnitures. Le disque est en liaison pivot d’axe (O, z ) ) avec le châssis (non représenté ci-dessus) Chaque pièce « en double » est indicée 1 ou 2. On donne le schéma cinématique du dispositif de freinage. Le vérin placé entre les points D1 et D2 est représenté séparément. Questions 1. On considère que la entre la tige et le corps du vérin est une liaison pivot glissant. Elle est obtenue par composition. Donner les 2 liaisons en parallèle qui permettent d’obtenir cette liaison équivalente. 2. Faire le Graphe de structure en considérant le vérin et le disque. 1/8 PCSI Sciences de l’Ingénieur Schéma cinématique (sans le disque et sans le vérin). 2/8 PCSI Sciences de l’Ingénieur Schéma cinématique du montage du vérin. Exercice 3 : Sys-Reeduc (CCP PSI 13) La machine de rééducation SYSREEDUC est issue d'un projet régional entre différents laboratoires de recherche : L'objectif de ce projet était de réaliser un système capable d'évaluer et d'aider à la rééducation des membres inférieurs. Le principe de la rééducation est de solliciter les différents muscles de la jambe afin de récupérer un maximum de mobilité suite à un accident. On distingue deux types de rééducation : Rééducation passive, qui vise à récupérer la mobilité en terme d'amplitude du mouvement. Elle est réalisée à l'aide de mouvement en chaîne ouverte où les membres sont pilotés par une machine ou un kinésithérapeute ; Rééducation active, qui vise à renforcer les muscles et la coordination musculaire. Elle est réalisée en chaîne fermée : le patient ne se laisse pas conduire, il doit résister au mouvement proposé par la machine ou le kinésithérapeute. Description du système Afin de réaliser le mouvement en chaîne fermée souhaité, le choix effectué du mécanisme de la machine SYS-REEDUC suppose que la hanche est fixe par rapport au bâti et que le mouvement est engendré par un support mobile sur lequel repose le pied. De plus, afin de pouvoir développer une chaîne cinématique permettant la réalisation de mouvement en chaîne musculaire fermée et par analogie aux systèmes robotisés, l’ensemble mécanique, constitué du membre inférieur et du dispositif de rééducation, doit former une chaîne cinématique fermée. 3/8 PCSI Sciences de l’Ingénieur Er reur ! Signet non défini. O0O1 L.xc O1O2 L.x j O0O2 x(t ).x0 La chaîne cinématique, se compose du bâti 0 (le haut du corps du patient est supposé lié au dossier du bâti), du support mobile 1, du support intermédiaire 2, du support de pied 3, de la cuisse, de la jambe et du pied. Un seul côté est représenté mais la machine réelle permet de travailler sur les deux jambes en même temps si cela est nécessaire. Justification de la modélisation adoptée pour la liaison entre 1 et 2 La liaison entre 1 et 2 suivant l'axe de dorsi-flexion du pied (axe l'intermédiaire de 2 roulements. (O2 , z 0 ) ) est réalisée par On peut modéliser les liaisons réalisées par ces roulements entre le bâti et l'axe en rotation comme étant des liaisons sphériques (ou rotule) de centre A et de centre B. Question 4/8 PCSI Sciences de l’Ingénieur 1. Donner la liaison équivalente à ces deux liaisons en parallèle. Validation du choix pour la liaison glissière entre 0 et 1 La liaison glissière entre 0 et 1 étant réalisée à l'aide d'un composant intégrant directement les différentes fonctionnalités, il est nécessaire de vérifier qu'il convient aux longueurs de la cuisse et de la jambe du patient. Pour les question suivante, on ne prend pas en compte le mouvement de rotation interneexterne du pied : 23 t = 0 rad . On fait alors l'hypothèse d'un mouvement plan dans le plan (O0 , x0 , y 0 ) . Questions 2. Déterminer la loi entrée-sortie x t en fonction de 3. Donner la valeur maxi de L sachant que liaison glissière est de 1,3 m. Conclure. 0c 0c et L. varie de 0° à 80° et que la course de la On donne le schéma bloc de l’asservissement en position : Etude du reducteur 5/8 PCSI Sciences de l’Ingénieur On note : Z0 1/0 Z 1 le nombre de dents 2 /0 Z2 3/0 la vitesse de rotation du solide 3 par rapport au bâti 0. le nombre de dents de la couronne 0, liée au bâti. la vitesse de rotation du pignon 1 par rapport à 0 ; du pignon 1. la vitesse de rotation du pignon 2 par rapport à 0 ; du pignon 2. le nombre de dents Questions 4. Déterminer la relation entre les vitesses de rotation Z0 et 1/0 et 3/ 0 en fonction de Z1 . 5. Les solides 1 et 3 du réducteur sont liés soit à l'axe moteur, soit à l'axe de la poulie. Définir en le justifiant quel solide est relié à quel axe. 6. Sachant que Z1 = 10 dents et que l’on veut un rapport de réduction déterminer le nombre de dents Z0 K5 1 , 10 . Etude du système poulie courroie 6/8 PCSI Sciences de l’Ingénieur Question 7. Déterminer K6 sachant que la poulie à un rayon r 46,1 mm Exercice 4. Un mécanisme tournant est supporté par six roues identiques (3) dont l’une est représentée ci-dessous. Cette roue est en liaison pivot d'axe x 2 avec le carter (2) de la machine, cette liaison est située en A et la rotation est repérée par l'angle θ. Le carter est en liaison pivot glissant d'axe O1 et la rotation est repérée par l’angle φ. z1 avec le socle (1), cette liaison est située en La roue est en contact avec le socle en M. Le mécanisme évolue dans le plan horizontal (O1 , x1 , y1 ) . Le but de cet exercice est d'étudier le glissement au niveau du contact roue-socle. On donne : HA R.x 2 et AM r.z1 Questions 1. Déterminer l'expression du vecteur rotation (3 / 1) . 7/8 PCSI Sciences de l’Ingénieur 2. Le point de contact M est à la verticale du point A. On considère qu'en ce point M, le roulement est sans glissement. En déduire 3. Soit N un autre point du contact tel que vitesse de glissement en ce point. en fonction de . MN a.x2 . Déterminer l'expression de la 8/8 PCSI Sciences de l’Ingénieur 9/9
© Copyright 2026 Paperzz