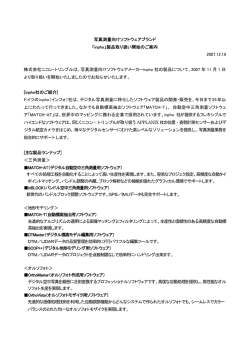
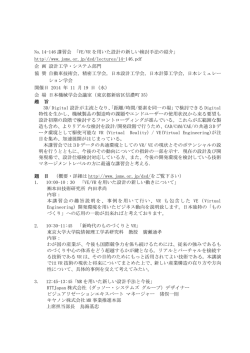
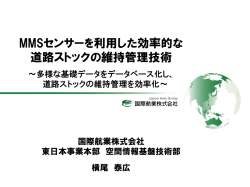
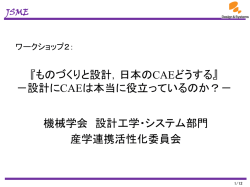
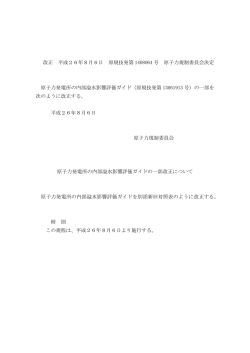
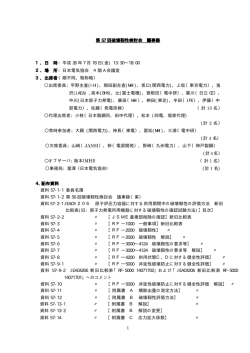
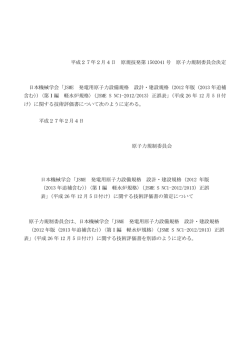
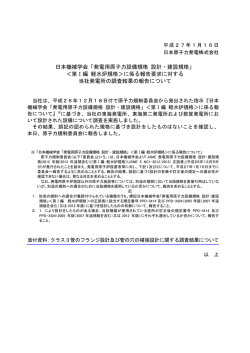
3.2.5 小型移動ロボット用遠隔操縦・視覚情報取得用インテリジェントセンサの開発 早稲田大学理工学総合研究所 橋詰匠 栄野隼一 荒木政和 清田光政 三菱電機株式会社 瀧口純一 (1) 目的 本研究は被災現場で使用する情報収集システムに用いるためのインテリジェントセン サの開発を目的としている.図 1 にインテリジェントセンサ用途を示す. (a) 遠隔操縦用リアルタイム半球画像 本センサに搭載している光学系は,リアルタイムに取得できる収差の少ない前方半球 視野を持つため,モニタへ映し出し,遠隔操縦に使用する. (b) 自己位置標定装置 IMU などを用いた自己位置標定装置により,移動体姿勢角,自己位置を高精度に算出 する. (c) 環境地図 ロボットの真上や真横を撮影し,パノラマ状に展開した後,自己位置に合わせ張り合 わせることで,通常の光学系では作成不可能な歪みのない移動軌跡上の実写地図を作成 する. (d) GIS データベースへの統合 ロボットの周囲 360°の距離情報と画像テクスチャを統合してローカルな三次元地図 を作成し,さらに基地局で GPS データを加えることにより,防災シミュレータ等で用い る GIS データベースの補足データの収集が可能となる. 図1 インテリジェントセンサ用途 - 159 - (2) 年次実施計画 平成14年度 センサヘッドとセンサ制御器の製作及び単体評価試験 主要目標性能:①センサヘッド直径Φ50mm以下 ②目標位置標定精度 1m以下連続移動100m ③二次元フィールドでの地図更新レート0.2Hz以上 ※移動体の速度変化及び旋回方向を考慮した地図作成機 能の達成 平成15年度 センサ信号処理の高速化、及び試験用移動プラットフォームを用いたテ スト,フィールドでの総合試験・評価 主要目標性能:①地図更新レート1Hz以上 ②視野角;前方視野55°以上,側方視野角45°以上 ③三次元空間での画像空間安定化 ※地面傾斜や凹凸への対応,高低情報を含む三次元地図 (平成16年度) センサヘッド小型化,自己位置標定精度向上 (平成17年度) センサ制御機器とIMUの小型化,三次元地図生成 (平成18年度) 移動機構との統合,GISデータベースへの三次元データ統合 (3) 前年度までの成果要約 平成14年度では,前方半球視野を持つ ODV を移動体に装備することで,上下左右を 含む視野情報が得られるため,被災者の早期発見や走行不能領域の予測など,移動ロボッ トの遠隔操縦に有効であることを確認した.また,二次元フィールドにおいて,磁気方位 計と加速度計による IMU での姿勢・位置情報を取得し,自己位置標定を行った.ODV の 画像を展開し得られるパノラマ画像を,移動体の移動軌跡にしたがって重ね合わせるパノ ラマ環境地図を作成した.得られたパノラマ環境地図は,被災者位置確認や救助隊の救出 プラン策定,ロボット等の回収に有効であることを確認した. (4) 平成 15 年度の目的 平成15年度は,平成14年度で達成できなかった自己位置精度向上と三次元空間での 環境地図生成の二つを目的とする.自己位置標定精度向上では,ODV画像から移動体の速 度情報を抽出するアルゴリズムの開発を行い,得られた三次元相対速度とキャタピラ回転 速度を観測量とするカルマンフィルタにより,加速度計やジャイロのバイアスを補正し, 位置標定精度向上を図る. 環境地図では二次元平面から三次元空間に拡張するため,ロール角,ピッチ角の画像補正 を行う画像スタビライザ機能付きパノラマ環境地図生成手法を提案する.さらに,得られ た自己位置と姿勢からモーションステレオ視により撮影対象物の距離を測定し,画像テク スチャを貼り付ける三次元地図生成手法を開発し,GIS データ拡張用として防災基地局と のシステムアップを目指す. - 160 - (5) 平成 15 年度の成果 表 1 に当初目標と試作機の性能比較を示す.当初目標に対してセンサヘッド径と自己位 置標定精度は満足できなかったものの,改良に向けての技術的目処をつけることができた. 表1 主要性能一覧 項目 目標性能 試作 1 号機性能 センサヘッド直径 φ50mm 以下 φ160mm ODV 直径 φ40mm 以下 φ60mm パノラマ環境地図 更新レート 1Hz 以上 約 1Hz(ただし 画像処理のみ) 画像スタビライザ ピッチ角 5°以上 ロール角 5°以上 ピッチ角 10°以下 ロール角 360° ◎ ODV 画 角 (直 射 /反 射ハイブリット光 学系構成) 前方 55°以上 側方 45°以上 同左 ◎ 自己位置標定精度 1m以下(100m 走行 時) 三次元地図 10m以下(100m 走 行時) デモ環境下で VRML 出力可能 備考 イルミネータの 小型化で対処可 能 来年度小型化予 定 最適化,PC の 処理能力向上に より対処可能 次年度性能改善 実施予定 評価 × △ ○ △ ○ (a) センサヘッド部 図 2 に ODV(OmniDirectional Vision)光学系原理図を示す. ODV は,主鏡,副鏡,レンズ,CCD カメラ,アクリルカバ ーから構成されている.主鏡と副鏡は,その反射面の動径方 向の断面形状は凹曲面であり,周方向の断面形状も凹曲面な ので,非点収差の発生は抑えられ,かつ2枚の反射鏡で像収 束点を CCD 面に一様に置くことができ,低照度下において 図2 ODV 原理図 図3 試作機外観 も焦点の合ったシャープな映像が得られる. なお,本試作 ODV では,反射/直射投影比率を大きく取 り,パノラマ展開画像の分解能を高くしている.図 3 に今回 試作したセンサの外観図を示す. (b) パノラマ環境地図生成部 本システムは前方と側方の視野を持つ ODV によって撮像 した画像をパノラマ展開し,加速度計とジャイロ等により構 成 さ れ る MEMS(Micro Electro Mechanical Systems) IMU(Inertial Measurement Unit) によって,姿勢と直線加速度を計測する.そして画像取得 タイミング毎の移動ベクタから画像の重ね合わせを行い,継ぎ目の無い連続パノラマ画像 による環境地図を生成する. - 161 - 1) ロール姿勢変化補正 図 4 にロール姿勢変化時の取得画像の補正結果を示す.パノラマ展開する際の基準点 を IMU により計測したロール角分ずらすことによって,常に水平面基準のパノラマ展開 画像を得られることがわかる. (a) 基準画像 図4 (b) ロール姿勢変化画像 図5 ロール補正パノラマ画像 ロール姿勢変化補正 図5に図4に対応するロール補正による展開画像を示す.図5より重力方向である道路が 画像中心に位置しており,ロール姿勢変化補正が有効であることが確認できる. 2) ピッチ姿勢変化補正 図 6 に姿勢変化における座標系の定義図を示す. ODV 基準直交座標系を ( X o , Yo , Z o ) ,水 ( ) 平面基準直交座標系を X p , Yp , Z p とし,ロール,ピッチ,ヨーの順にオイラー角を (φ , θ ,ψ ) とすると,ODV 基準直交座標系と水平面基準直交座標系の変換式は式(1)で表せる. ⎛ X p ⎞ ⎛ cos θ ⎟ ⎜ ⎜ ⎜ Yp ⎟ = ⎜ 0 ⎜ Z ⎟ ⎜ − sin θ ⎝ p⎠ ⎝ sin θ ⎞ ⎟ 0 ⎟ 0 cos θ ⎟⎠ 0 1 ⎛ Xo ⎞ ⎟ ⎜ ⎜ Yo ⎟ ⎜Z ⎟ ⎝ o⎠ (1) 式(1)の座標変換式より図 7 のように水平面基準へ展開画像を変換するものとする. 図6 座標系の定義 図7 ピッチ姿勢変化の各座標系 図 8 に ODV 水平設置時の取得パノラマ画像,図 9 にピッチ角 10°姿勢変化時の取得画 像を水平面上に補正した画像を示す.図 8,図 9 より物体の位置及び傾きが同様の傾向を 示しており,本補正が有効であることがわかる. 図8 基準パノラマ画像 図9 - 162 - ピッチ補正パノラマ画像 3) 画像スタビライズ結果 図 10 にピッチ,ロール動揺による姿勢変化をともなった際の環境地図を示す.図中の 赤いラインは画像歪の比較のため,あらかじめ壁,床に引いたものである.図 10 は直線的 な通路を走行しているにも関わらず,環境地図上ではロール回転の影響により曲線的な通 路となっている.また,ピッチ回転の影響により,物体の傾きに歪みが生じていることが わかる.図 11 にロール,ピッチ補正を実行した最終的な環境地図を示す.補正前後での赤 いラインの歪みをみると,図 10 の補正前画像では歪んでいたラインが,図 11 の補正後画 像では直線的になっていることがわかる.また,ロール変化による影響も補正され,直線 的な通路が再現されていることがわかる.これにより,ロール,ピッチ変化時の画像補正 が有効であることが確認でき,不整地等での姿勢変化時においても視覚的に状況把握の容 易な水平面基準の環境地図を作成できること が確認できた. 図10 姿勢変化補正なしパノラマ環境地図 図11 水平面基準パノラマ環境地図 (c) ODV 画像を用いた移動速度推定部 (b)項において,センサの回転に関しては補正ができたため,以下において周囲環境を基 準に画像情報から車速推定を試みる.まず ODV 画像から床上の特徴点 P を抽出し,ODV特徴点の位置関係を計算する.そして次フレームの画像から対応する特徴点の位置関係を 計算することで,移動距離を推定する.ここでは,ODV 画像上のある点と ODV の光学系 を基準とした直交座標系との位置関係を求める. 通路上の床と壁の境界線とドアなどの垂直エッジの交点を特徴点として抽出し,ENU座 標系におけるODVの移動速度をODV画像上の特徴点の追尾を行うことで推定する.座標系 の定義を図 12 に示し,ODVのドーナツ画像との対応を図 13 に示す.ODV座標は2項のよ うに水平面に空間安定化されているためENU系に対してh 0 の高さに平行と仮定する. ODV座標系における特徴点Pの座標(X P ,Y P ,Z P )は,以下のように表される. XP = tan θ g × h0 cos(π − θ r ) =− tan θ g × h0 (2) cos(θ r ) (3) YP = h0 × tan(π − θ r ) = −h0 × tan(θ r ) (4) Z P = h0 以後,この点 P の時系列的な移動ベクトルを計算することで慣性基準の移動速度が推定 できる. - 163 - θr Y U h0 Z P 図 12 θr X θg E θg (X P , Y P , Z P ) N P ODV 空間座標と特徴点 図 13 ODV 画像上での対応点 (d) カルマンフィルタによる自己位置補正 画像推定による速度は,いつでも算出できるわけでなく,キャタピラ回転速度もキャタ ピラが滑ったり,足場が崩れたりした場合には速度に誤差が生じるため,常に計測可能な IMU 出力を,画像処理による推定速度とキャタピラ回転速度により補正するカルマンフィ ルタを作成し,自己位置標定精度向上を図る. システム入力信号にIMUのセンサ座標基準加速度(a x , a y , a z )とオイラー角 (φ , θ ,ψ ) を, 観測信号には,3項で求めた画像推定による速度と慣性基準に変換したキャタピラ回転速 度の重み付平均(v x , v y , v z )を用いる.状態方程式は, x k +1 = Fk x k + G kWk (5) 観測方程式は y k = H K xk + q k k:離散時刻 x k ;状態ベクトル y k :観測ベクトル F k : 状態行列 H k :観測行列 G k: 駆動行列 W k: プロセスノイズ (6) で表される.尚,観測信号により停車中と判断した場合,画像処理により速度を算出でき ない場合およびキャタピラが滑る場合等は,速度平均演算における重みを変えたり観測ノ イズを変化させることでカルマンゲインをリアルタイムに変化させる. 実際に 3.2[m]×3.2[m]の L 字型のコースを走行し,この際の IMU と画像推定速度,及び 車軸エンコーダからとったキャタピラ回転速度の時系列データよりポスト処理にて計算し た結果を図 14 に示す.IMU による純慣性出力のみで求めた移動経路と比べ,カルマンフ ィルタ出力は,良好な補正結果を得られ,真の移動経路に近づいていることがわかる. - 164 - 緑:真の移動経路 赤:IMU 出力のみにより求めた 移動経路 青:カルマンフィルタによる移動経路 図14 移動軌跡出力結果 (e) ODV/IMU 複合モーションステレオによる三次元地図生成 大規模災害発生時における各地域の詳細な被災状況の把握は,住民の避難誘導,救難隊 の派遣,二次災害の防止等を行うための情報として重要である.特に GIS データベースと リンクした被災地の三次元地図データの迅速な収集/データベース化は,救助隊の派遣優 先度決定,救難計画立案,救助隊の詳細誘導に有効である. 以下において,三次元データの取得方法について詳述する.本センサをレスキューロボ ットに搭載することにより,IMU を用いた INS (Inertial Navigation System)機能と画像によ るモーションステレオの原理により周辺環境の距離を計測するとともに,周囲環境の画像 を同期させて取得することが可能である.本センサによるモーションステレオは画像間の 対応を取る為に通常カメラの 2 眼ステレオのようにエピポーラ拘束を使用するが,ODV と いう特殊な全周光学系を用いるため,エピポーラ拘束算出過程は通常の中心射影のカメラ と比べて複雑になる.図 15 にエピポーラ線算出図を示す.図 15 においてカメラ①,カメ ⎡ M ′⎤ ⎡ R T ⎤ ⎡ M ⎤ ⎢ 1 ⎥ = ⎢0 1⎥ ⎢ 1 ⎥ ⎦⎣ ⎦ ⎣ ⎦ ⎣ R:カメラ間相対回転行列 (7) T:カメラ間相対移動ベクトル行 ラ②座標系原点と空間上の注視点の 3 点からなる平面をエピポーラ平面とし,またカメラ ①座標系における空間上の注視点方向の直線をカメラ②仮想画像面に投影したものをエピ ポーラ線とする.カメラ①座標系における注視点 M のカメラ②座標系 M’ へ の座標変換式 は式(7)になる. 式(7)の座標変換式により,カメラ②座標系におけるエピポーラ平面方程式を算出し,ODV 仮想画像面との交線を求め,デジタル画像に投影することによりエピポーラ線を算出して いる. - 165 - 図15 エピポーラ線算出図 図16 エピポーラ線抽出例 図 16 にエピポーラ線抽出例を示す.提案手法はこのエピポーラ拘束を移動体の時系列 的な位置・姿勢偏差から幾何的に求めるものであり,エピポーラ拘束を求めるに当り画像 自体を使わないため,複雑な環境においても 2 枚の画像の対応点探索過程のロバスト性が 高いという特徴がある.エピポーラ線の抽出後,両画像間の ActiveCell という小領域内に おいてノルム比較をすることにより適合度を算出し,最適な対応点を決定する.図 17 の実 験装置を示す.本実験装置は ODV,イルミネータ,IMU から構成されている.図 18 に図 17 の実験装置を用いてモーションステレオを行った距離画像結果を示す.本センサにより 取得した時系列的な距離データとテクスチャをレンダリングし,三次元環境を復元させて いる.図 19 に VRML 表示例を示す. 図17 実験装置 図18 距離画像 図19 VRML 表示 (6) 平成 15 年度の成果発表等 (a) 論文掲載 T.Hasizume, et al .,”A Study of Autonomous Mobile System in Outdoor Environment (Part 21 A Development of Intelligent Vision Sensor for a Remote-control Mobile Robot)”, JSME, N2A1-2F-B3, 2003.5.25. 荒木 政和:屋外環境下で用いる自律移動システムに関する研究, ロボティクス・メカト ロニクス講演会'03, ロボティクス・メカトロニクス講演会'03 講演論文集, 2A1-2F-B3, 2003 - 166 - 廣瀬 直輝:屋外環境下で用いる自律移動システムに関する研究 第 23 報 二組のミ ラ ー を持 つ 反 射 型全 周 撮 像 器の ス テ レ オ視 に よ る 高精 度 な 距 離画 像 生 成, SI2003, 計 測自動制御学会 廣瀬 システムインテグレーション部門講演会論文集, 1B3-6, 2003 直輝:屋外環境下で用いる自律移動システムに関する研究 第 22 報 半球視野 を 持 つビ ジ ョ ン セン サ に よ るパ ノ ラ マ 環境 地 図 生 成, SI2003, 計 測 自 動 制 御学 会 シ ステムインテグレーション部門講演会論文集, 3J3-1, 2003 (b) 特許 「画像生成装置」特願 2002−356090 (7) 参考文献 [1] T. Hasizume, et al.: “A Study of Autonomous Mobile System in Outdoor Environment (Part 14 Development of the self-positioning system with an ODV),” JSME, No.001-4 pp.98-99, 2000.3.11. [2] T. Hasizume, et al.: “A Study of Autonomous Mobile System in Outdoor Environment (Part 15 Evaluation of the Self-positioning System with an ODV),” JSME,2P2-46-061,200.5.14. [3] T. Hasizume, et al.: “A Study of Autonomous Mobile System in Outdoor Environment (Part 19 Autonomous Mobile System Based on the Environmental Map Generation),” JSME, 1P1-G07, 2002.6.8. [4] T. Hasizume, et al.: “A Study of Autonomous Mobile System in Outdoor Environment (Part 20 Outline of a Forward-looking Hemispheric Vision for Reconnaissance & Surveillance Operation) ,” JSME, pp259-260, 2002.12.19. [5] J. Takiguchi, et al.: “A Self-positioning System Using an Omnidirectional Vision,” Transactions of the Japan Society of Mechanical Engineers(Part C), JSME, No68-673, pp.206-213, 2002. [6] J. Takiguchi, et al.: “High Precision Range Estimation from an Omnidirectional Stereo System,” Proc. IEEE Int. Workshop Intelligent Robots & Systems, Switzerland, pp.263-268, 2002. - 167 -
© Copyright 2026 Paperzz