基盤創成工学
2008
担当・辻 伸泰
材料の力学的性質(基礎、転 位論、 強化機構)
【4
5時限分】
0.材 料の力 学的性 質 を学ぶ 理由 :
金属材料は、比較的大きな強度を有しながら、展延性に富んでいる。そのため、単に強度が高いと
いうだけでなく、様々な形に加工することが可能であったり、また衝撃力等に対して脆く破壊する危
険性も少ない。このことが、金属材料の有用性を際立たせており、構造材料として多量に使われてい
る理由となっている。金属材料は、素材として製造する際に圧延、鍛造、線引き等の一次加工を受け
る。また、厚板、薄板、棒、線材などの形状になったあと、実際の製品とするために、鍛造、深絞り、
曲げあるいは切削などの二次加工を受ける。いずれもそこで起こっていることは、金属の塑性変形で
ある。そして製品として用いられる場合、機械設計段階で必ず材料の強度・延性等が問題となる。す
なわち、金属材料の変形の原理を知ることは、構造材料として金属を用いるものにとって避けて通る
ことのできない課題である。本講義の目的は、材料強度学の基本的概念を学び、強度や加工性といっ
た変形特性を設計するための基礎を身につけることである。
本講義では、まず材料のマクロな変形を、弾性変形、塑性変形に分けて論じる。応力とひずみとい
う基礎概念から、実際の材料試験に即した知識までを概説する。金属材料の塑性変形は、ほとんどの
場合転位のすべり運動によって担われる。そこで本講では、転位論の基礎を述べ、材料の強度や変形
特性を決めるものが何であるかを理解する。そして更に、転位強化、結晶粒微細化強化、分散強化、
固溶強化、析出強化という、金属の強化機構の原理と定式化について学ぶ。
【参考書】
(1) Materials Science And Engineering, An Introduction: by William D. Callister, Jr., John
Wiley & Sons, Inc.
(2) Mechanical Metallurgy, G.E.Dieter, McGraw Hill, 1987
(3) Fundamentals of Metal Forming, Robert H. Wagoner, Jean-Loup Chenot, John Wiley &
Sons, 1996
(4) Structure of Metals, Charles Barrett and T.B.Massalski, Pergamon Press, 1980
(5) 材料の科学と工学、[2]金属材料の力学的性質、W.D.キャリスター著
風館
(6) 加藤雅治:入門転位論、裳華房、1999
(7) 鈴木秀次:転位論入門、アグネ、1986
(8) 材料強度の原子論、日本金属学会、1985
(9) 加藤雅治、熊井真次、尾中
晋:材料強度学、朝倉書店、1999
(10) 丸山公一、中島英治:高温強度の材料科学、内田老鶴圃、1997
(11) 金属塑性加工学、加藤健三、丸善、1971
(12) 材料強度の基礎、高村仁一、京都大学学術出版会、1998
(13) 材料強度の考え方、木村
宏、アグネ技術センター、2000
1
入戸野修
監訳、培
基盤創成工学
2008
担当・辻 伸泰
1. 材料の マクロ 変形の 基礎
./
1.1. 材料の 弾性変 形と塑 性変形
'(
2
#$%&
1
!"
3
0
+,-
)*+,-
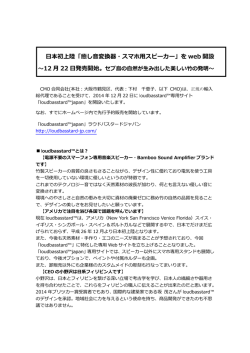
図1.1
金属材料の典型的な応力ひずみ曲線
弾性変形(Elastic Deformation)=力が徐荷された場合、時間的遅れなしに元の形に戻るような変形
"=E #
(1.1)
E:
!
Young's modulus
"=G #
(1.2)
G:
!
(ヤング率(縦弾性係数))
G=
Shear modulus
(剛性率(横弾性係数))
E
2 (1+ ")
ν:
(1.3)
Poisson's ratio
!
表1.1
(ポアソン比)
典型的な金属材料の弾性定数
Material
E (GPa)
G (GPa)
ν
Aluminum alloys
72.4
27.5
0.31
Copper
110
41.4
0.33
Steel (plain carbon & low-alloy)
200
75.8
0.33
Stainless steel (18Cr-8Ni)
193
65.6
0.28
Titanium
117
44.8
0.31
Tungsten
400
157
0.27
塑性変形(Plastic Deformation)=力を徐荷しても残る永久変形
2
基盤創成工学
2008
担当・辻 伸泰
1.2. 応力と ひずみ
1.2.1.ひずみと回転
仮定:
連続体
線形弾性論
微小変形理論(ひずみ成分の大きさが1に比べて十分小さい)
x3
!"$
!"#
u
x
x+u
0
x1
x2
図1.2
変位(Displacement):
u " (u1,u 2 ,u 3 )
(1.4)
u が物体内のどの部分でも同一なら、単に平行移動しただけ。
!
変形・・・u の場所による変化の議論
変形勾配(Distortion):
"u i
"x j
(i, j = 1,2,3)
(1.5)
変形勾配の対称成分をひずみ(Strain)εij 、反対称成分を回転(Rotation) ωij と定義する。(対称
!
化操作による変形勾配テンソルからの剛体スピン成分の除去)
"ij + # ij $
!
!
%u i
%x j
$u j (
1 % $u
*
"ij # '' i +
2 & $x j $x i *)
(1.6)
3
基盤創成工学
2008
担当・辻 伸泰
1 & $u $u j )
+
" ij # (( i %
2 ' $x j $x i +*
(注)
「ひずみ」という場合、工学せん断ひずみ
!
" ij #
$u i $u j
+
= 2%ij
$x j $x i
(i & j)
(1.7)
を用いる場合もある。
!
#"11 "12 "13 &
%
(
"ij = %"21 "22 "23 (
%$"31 "32 "33 ('
)
"u1
+
"x1
+
+1 # "u
"u &
=+ % 2 + 1(
+2 $ "x1 "x 2 '
+1 # "u 3 "u1 &
+2 %$ "x + "x ('
*
1
3
!
!
#"11 "12
%
" ij = %" 21 " 22
%$" 31 " 32
1 # "u1 "u 2 &
+
%
(
2 $ "x 2 "x1 '
"u 2
"x 2
#
1 "u 3 "u 2 &
+
%
(
2 $ "x 2 "x 3 '
1 # "u1 "u 3 &,
+
%
(.
2 $ "x 3 "x1 '.
)/11 /12 /13 ,
1 # "u 2 "u 3 &. +
.
+
%
(. = +/12 /22 /23 .
2 $ "x 3 "x 2 '.
+*/13 /23 /33 ."u 3
.
.
"x 3
-
#
0
%
%
"13 &
)u .
( %1 + )u
" 23 ( = % - 2 * 1 0
2 , )x
)x 2 /
" 33 (' % + 1
%1 )u 3 )u1 .
%2 -, )x * )x 0/
$
1
3
(1.8)
1 + )u1 )u 2 . 1 + )u1 )u 3 .&
*
*
0
0(
2 , )x 2 )x1 / 2 , )x 3 )x1 /(
1 + )u 2 )u 3 .(
0
*
0(
2 , )x 3 )x 2 /(
1 + )u 3 )u 2 .
(
*
0
0
(
2 , )x 2 )x 3 /
'
(1.9)
一般に、行列の対角成分の和(trace)は座標系の取り方によらない不変量(invariant)である。
!
"11 + "22 + "33 = 不変量
(1.10)
V + "V = V (1 + #11 ) (1 + #22 ) (1 + #33 )
" V (1 + #11 + #22 + #33 )
!
(1.11)
よって、微小変形の場合、
!
#V
!"11 + "22 + "33 = V
ひずみ行列のトレース
(1.12)
=
物体の体積変化率
!
4
基盤創成工学
2008
担当・辻 伸泰
1.2.2.応力
力( force,
load )
表面力( traction );物体表面に作用
体積力( body force )
;物体全体に作用(電磁力、重力、etc.)
外力が物体に作用すると、物体は自ら変形することにより外力と釣り合う内力を生じる。内力の分
布状態は材料の形状寸法などにより変化するため、ひずみ(局部的な変形)に対応する局所的な内力
(応力(Stress))を定義する必要がある。
x3
x3
!33
F = (F1, F2, F3)
!32
!31
F3
!23
!13
x2
!12
F2
!21
x2
!11
A
!22
F1
x1
x1
図1.3.
図1.4.
面力
X=
F
A
(1.13)
応力の定義
垂直応力(Normal Stress)
!
" 33 #
F3
A
(1.14)
せん断応力(Shear stress)
"13 #
!
F1
F
, " 23 # 2
A
A
(1.15)
#"11 "12 "13 &
%
(
" ij = %" 21 " 22 " 23 (
%$" 31 " 32 " 33 ('
!
#" ii
%3
%
=% 0
%
%0
$
!
0
" ii
3
0
& #
"
0 ( %"11 ) ii
3
( %
0 ( + % "12
( %
" ii ( %
"13
3' $
静水圧(Hydrostatic)成分
!
" 22 )
" ii
3
" 23
&
(
(
" 23 (
(
" ii (
" 33 )
3'
"13
偏差(Deviatoric)成分
(" ii = "11 + " 22 + " 33 )
!
"12
5
(1.16)
基盤創成工学
2008
担当・辻 伸泰
1.3. 弾性変 形にお ける応 力とひ ずみの 関係
線形弾性論:フックの法則(Hooke's law)
" ij = C ijkl e kl
(1.17)
Cijkl: 弾性定数(Elastic Constant )
弾性スティフネス(Elastic Stiffness)
!
e ij = C"1
ijkl # kl
(1.18)
Cijkl-1:弾性コンプライアンス(Elastic Compliance)
応力成分、ひずみ成分が対称であること、弾性ひずみエネルギーがひずみの2次形式で表されるこ
!
とから、
C ijkl = C jikl = C ijlk = C klij
(1.19)
よって、独立な弾性定数は最大で21個。
結晶のように対称性が高い場合には独立な弾性定数の数はさらに減り、立方晶では3個。等方体で
!
は、2個の独立な弾性定数(Lame's
constant:λ、μ)があるのみで、
"11 = ( # + 2µ) e11 + # (e 22 + e 33 )
" 22 = ( # + 2µ) e 22 + # (e 33 + e11 )
!
!
!
" 33 = ( # + 2µ) e 33 + # (e11 + e 22 )
(1.20)
"12 = 2 µ e12
" 23 = 2 µ e 23
" 31 = 2 µ e 31
等方体の弾性定数としては、ヤング率E、ポアソン比ν、体積弾性率(Bulk
Modulus)Kなども
!
用いられる。
!
外部応力としてσ
11 のみの一軸応力を付加した場合、
!
E " #11 e11
" # $e 22 e11 # $e 33 e11
(1.21)
体積弾性率は、静水圧σ
11=σ22=σ33=σ H の付加の下で、
!
# + # + # 33
#
K " 11 22
" H
!
3 (e11 + e 22 + e 33 ) e ii
(1.22)
以上の式より、
!
E=
µ ( 3" + 2µ)
" +µ
"=
#
2 ( # +µ)
!
E = 2µ (1+ ")
!
K=
!
!
(1.23)
3" + 2µ
E
=
3
3 (1#2 $)
6
基盤創成工学
2008
担当・辻 伸泰
1.4. 弾性ひ ずみエ ネルギ ー
!"F
k
#$"x
F
図1.5.
ES =
伸びたバネに蓄えられる弾性エネルギー
1
1
k x2 = F x
2
2
(1.24)
単位体積あたりの弾性ひずみエネルギー(弾性エネルギー密度)E0 は、
E0 =
1
1
C ijkl e ji e kl = " kl e kl
2
2
E el =
1
1
" C ijkl e ji e kl dV = " # kl e kl dV
2V
2V
(1.25)
一般に応力、ひずみは場所によって異なるので、体積Vの物体に蓄えられる弾性ひずみエネルギー
!
Eel は、
!
!
7
(1.26)
基盤創成工学
2008
担当・辻 伸泰
1.5. 降伏条 件・・ ・等方 弾性体 の降伏 現象
金属材料の塑性変形機構は一般にすべり変形であることから、体積ひずみ変化 dεii(=dε11+ dε22
+ dε33 )は、ほとんど無視することができる。塑性仕事増分 dW は、偏差応力成分 σ
ij、圧力
P を
用いて、
dW = " ij d#ij = "$ij d#ij + P d#ij
(1.27)
金属材料に対して提唱・使用されている2つの降伏条件
① Tresca の降伏条件:物体内で最大せん断応力が降伏せん断応力(χ)に達すると降伏する。
②!von Mises の降伏条件:偏差応力の二次不変量(J'2)が一定値に達すると降伏する。・・・
Taylor と Quinney の組み合わせ応力実験により妥当性が確認され、塑性流動解析にも有用。
von Mises の条件を、
(
J"2 = # $"x $"y # $"y $"z # $"z $"x + $ 2xy + $ 2yz + $ 2zx
)
(1.28)
と書くと、
より、
!
1%
" $#xx $#yy " $#yy $#zz " $#zz $#xx = ' $ xx "$ yy
6&
(
(
J"2 = # xx $# yy
!
2
) + (# yy $# zz )
2
2
) + ($ yy "$ zz )
2
2
2(
+ ($ zz "$ xx ) *
)
(
+ (# zz $# xx ) + 6 # 2xy + # 2yz + # 2zx
(1.29)
)
= 一定
(1.30)
となる。
!
いま、単軸引張り(σ
xx = Y、他の成分はゼロ)を考えると、
J"2 = 2 Y2 =const.
(1.31)
よって、von Mises の条件は、
2
!
(" xx #" yy ) + (" yy #" zz )
2
2
(
)
+ (" zz #" xx ) + 6 " 2xy + " 2yz + " 2zx = 2 Y2 = 6 $ 2
(1.32)
となる。テンソル表記を用いると、
!
$3
'
% #"ij #"ij (
&2
)
1
2
と書けるため、左辺を相当応力
=Y
(1.33)
!
と定義すると、
!von Mises の条件=「相当応力が引張降伏応力に達すると材料は降伏する」
ということができる。
8
基盤創成工学
2008
担当・辻 伸泰
1.6. 材料試 験によ る応力 -ひず み曲線 の測定
1.6.1.引張試験
引張試験片:丸棒状、板状・・・JIS で規定( JIS Z2201 )
初期標点間距離L0、初期直径D0 の丸棒試験片(初期断面積A0 = π D02 / 4 )の単軸引張試験を
行い、標点間距離がLとなった時点(直径がD)の垂直荷重がPだとすると、
公称応力(Nominal Stress)
:
s"
P
A0
(1.34)
公称ひずみ(Nominal Strain)
:
e"
!
L #L 0
L0
(1.35)
真応力(True Stress)
:
"#
!
P
A
(1.36)
真ひずみ(True Strain)
:
" # ln
!
(1.34)
L
D
= 2ln 0
L0
D
(1.37)
(1.37)より、
!
" = s (1 + e)
(1.38)
" = ln (1 + e)
(1.39)
また、
!ひずみ速度(Strain Rate):
d" 1 dL
v
!
"˙ = =
#
dt L dt L p
(1.40)
Lp:各時刻における試験片の平行部長さ
v:クロスヘッドの移動速度
絞り(Reduction in Area)
:
!
"#
A0 $ Af
A0
(1.41)
!
9
基盤創成工学
2008
担当・辻 伸泰
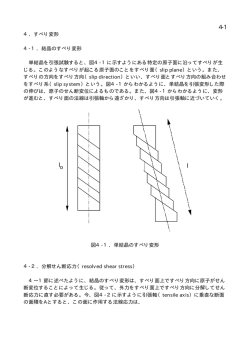
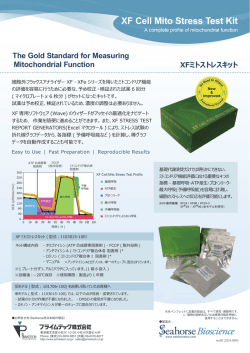
公称応力-公称ひずみ曲線
(a) 明瞭な降伏(点降下)現象(Yield Drop; Discontinuous Yielding)のある場合・・・軟鋼など
s
M
!B
N!"#$%&'
x ()
!yu
!yl
E
P
e
eu
el
ef
P:
E:
σyu:
σyl:
σB:
eu:
el:
ef:
図1.6
比例限
弾性限
上降伏応力(Upper Yield Stress)
下降伏応力(Lower Yield Stress)
引張強さ(Tensile Strength )
均一伸び(Uniform Elongation)
局部伸び(Local Elongation)
全伸び(破断伸び;Total Elongation)
(b) 明瞭な降伏現象のない場合・・・アルミニウムなど
s
!B
x
!0.2
e
e = 0.2%
σ0.2:
図1.7
0.2%耐力(0.2% Proof Stress; 0.2% Offset Stress )
10
基盤創成工学
2008
担当・辻 伸泰
1.6.2.くびれの開始条件(塑性不安定(Plastic Instability)
)
F
F
L
A
A + dA
!
L + dL
! + d!
図1.8
変形が局所的に起こり、長さLなる領域のみが L+ dL(dL>0)に変形し、断面積もA + dA(d
A<0)に減少したとする。一方、加工硬化(Strain Hardening, Work-Hardening)のために、この
領域をさらに塑性変形させるための応力が σ + dσ(dσ>0)へと増加したとすると、くびれの開
始条件は、
(" + d" ) ( A + dA) # " A
" A d# + # dA $ 0
(1.42)
体積一定条件(AL = 一定 )および真ひずみの定義より、
!
!
"
dA dL
=
= d#
A
L
(1.43)
よって、くびれの開始条件(塑性不安定条件)は、
d"
$"
d#
(1.44)
左辺は加工硬化率(Strain Hardening Rate)である。(注:変形応力(変形抵抗; flow stress )が
ひずみ速度の関数であれば、(3-49)式の表現は異なるものとなる。)
!
!
いずれにせよ、
「加工硬化が大きいほど、くびれは発生しにくく、材料の塑性変形は安定に進行する」
1.6.3.変形応力の実験式
n乗硬化則:
" = K #n
(1.45)
Ludwik の式:
!
" = Y + K #n
(1.46)
Swift の式:
!
" = K (B + # )
n
(1.47)
11
!
基盤創成工学
2008
担当・辻 伸泰
1.6.4.圧縮試験
圧縮試験では、治具と試験片の間の摩擦の影響が大なり小なり生じ、材料中の変形は均一ではない
⇨
潤滑の重要性
図1.9
I :不変形領域( dead cone )、II :主変形領域、III :均一変形領域
s
#$
x
!"
e
図1.10
引張試験、圧縮試験により得られる公称応力-公称ひずみ曲線
12
基盤創成工学
2008
担当・辻 伸泰
2.転位 論の基 礎
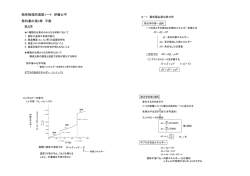
2.1. すべり 変形
結晶の塑性変形は、多くの場合すべり変形(slip deformation)
、すなわち、ある特定の結晶面(す
べり面;slip plane)上の特定の結晶方向(すべり方向;slip direction)に沿って生じるせん断変
形により担われる。
!
!
slip plane
図2.1
※
slip direction
!
!
結晶のすべり変形
すべり変形以外のせん断ひずみを生じる変形モードとして、双晶変形、マルテンサイト
変態がある。
また、高温ではクリープ変形や粒界すべりによっても塑性ひずみが生じる。
2.2. 転位の 運動に よるす べり
!
b
#"
a
!"
!
図2.2.
転位を含まない完全結晶のすべり変形が、図2.2のような A 列原子に対する B 列原子の一斉に起
こる相対運動により担われるとする。いま、すべり変形に伴う結晶のエネルギー変化が正弦曲線で与
えられるとし、すべり面間隔を a、すべり方向における原子間距離を b、剛性率を µ として、この
完全結晶にすべりを生じさせるために必要な臨界せん断応力を求めてみる。結晶のエネルギー変化が
正弦曲線で与えられる(図2.3(a))なら、これを微分して得られるB列原子を変位させるために必
要な力も、正弦曲線で与えられる(図2.3(b))。
よって、この完全結晶を変形させるために必要な応力 τ は、変位 x と原子間距離(バーガースベク
トル) b から、周期 b の正弦関数として、
$ 2# x '
" = " m sin&
)
% b (
と書ける。τ の最大値、τm(> 0 )が、求める臨界せん断応力である。
(2.1)
x が b に比べて小さいときはフックの法則が成立し、それはせん断ひずみ x/a を用いて
!
# x&
" = µ% (
$a'
(2.2)
と書けるはずである。このことと、(2.1)式が x << b のとき、
!
$ 2# x ' 2# " m x
" = " m sin&
)*
% b (
b
(2.3)
13
!
基盤創成工学
2008
担当・辻 伸泰
図2.3
となることから、
"m =
µb
2# a
(2.4)
が得られる。
a ≒ b とすれば、τm はおよそ µ / 10 程度のオーダーとなる(結晶の理想強度)。しかし、実際の
高純度の金属単結晶の試験により得られる臨界せん断応力の値は、おおよそ µ / 105 である。このこ
!
とは、実際の結晶のすべり変形は、図2.2のような原子列の一斉運動によって生じているのではな
いことを示している。
実際の結晶のすべり変形は、図2.4に示すように、転位(Dislocation)がすべり面上を運動する
(glide motion)ことにより生じる。
(a)
!
(b)
!
x
!
(d)
(c)
b
!
図2.4
転位の運動によるすべり変形
14
基盤創成工学
2008 担当・辻 伸泰
局所的なわずかの原子位置の変化が転位の運動を介してすべり面に沿って伝播すれば、結果的に、原
子列の一斉運動によって生じるのと同じ変形が、非常に小さな応力で可能になる(図2.5)。
!"#$%&'()*+,-...
/012&3456-)7#89:;<=
図2.5
/>1(?&@45(A(AB(5CD,EF)G7H
絨毯をずらすときの例え
1本の転位が結晶の端から端まで運動したときに生じるすべり面上のずれを、バーガースベクトル
(Burgers vector)と呼ぶ。すべり面、すべり方向、バーガースベクトルは、結晶構造により異なる。
表2.1
面心立方晶(FCC)、体心立方晶(BCC)におけるすべり系
crystal system
slip plane
slip direction
Burgers vector
FCC
{111}
{110}, {112},
{123},....
<110>
a/2 <110>
<111>
a/2 <111>
BCC
2.3. すべり の幾何 学
3.2.で述べるパイエルス応力を小さくするために、結晶のすべり変形は結晶学的な特定のすべり
面・すべり方向で起こる。例えば FCC 結晶の場合、等価な{111}面は4つあり、各{111}面上に等価な
<110>方向が3つあるから、独立なすべり系は12個あることになる。
いま、図2.6のような単結晶の単軸引張り変形を考える。
F
A
n
!
"
d
As
F
図2.6
単結晶丸棒試験片の一軸引張
引張力 F の方向とすべり面法線 n のなす角を θ 、引張方向とすべり方向 d のなす角を φ とす
15
基盤創成工学
2008
担当・辻 伸泰
る。試料の断面積を A 、引張力の大きさを F とすると、引張応力は、
"=
F
A
(2.5)
である。引張力のすべり方向への分力は、F cosφであり、すべり面の面積は、As = A/cosθであるか
ら、外力のこのすべり系への分解せん断応力(resolved shear stress)τは、
!
"=
F cos # F
= cos$ cos # = % cos$ cos #
AS
A
(2.6)
(2.6)式における方位因子、cosθcosφ をシュミット因子(Schmid factor)という。図2.6から
もわかるとおり、シュミット因子の最大値は、θ=φ=
45゜のとき、0.5 である。結晶の方位が決まれ
!
ば、個々のすべり系はそれぞれ特有のシュミット因子を持ち、シュミット因子の大きなすべり系ほど
その分解せん断応力が大きく、すなわちより活動しやすいことがわかる。シュミット因子最大のすべ
り系を主すべり系(primary slip system)とよび、それ以外のすべり系を2次すべり系(secondary slip
system)と呼ぶ。
2.4. 転位の 種類
転位には、転位の線ベクトル(t )とバーガースベクトル(b )が垂直な刃状転位(edge dislocation)、
線ベクトルとバーガースベクトルが平行ならせん転位(screw dislocation)
、そして混合転位(mixed
dislocation)がある。
刃状転位:
b!t
らせん転位: b //
混合転位:
t
それ以外
図2.7
刃状転位とらせん転位
16
基盤創成工学
2008
担当・辻 伸泰
!"#
&'
&'
$%
b
t
$%
&'
&'
!"#
()*+,-'.!"#/01$%/023456789:;<=
図2.8
すべり面上の転位ループ
2.5. 転位の 正負
(a)
!
(b)
!
!
(c)
!
!
図2.9
!
正負の刃状転位
図2.8においてせん断応力 τ をかけたとき、(a)の転位は左から右へ、(b)の転位は右から左へ動
くが、生じるせん断変形は同一である。例えば(a)を正の刃状転位(バーガースベクトル b )とする
と、(b)を負の刃状転位(バーガースベクトル - b )と呼ぶ。正負の決め方は、座標系(右手系 or 左
手系)およびバーガースベクトルの決め方(バーガース回路)による。(c)のように、正負の転位が同
一すべり面上で出会えば、転位は対消滅する(一種の回復)
2.6. 転位密 度( Di sl oc ati on D en sity)
転位密度:ρ≡単位体積の結晶中に含まれる転位の全長
単位は、m/m3 = m-2
完全に焼きなまされた金属材料中の転位密度は、ρ=109
位密度は、ρ=1014 1016 m-2 程度である。
17
1011 m-2 程度、強加工された材料中の転
基盤創成工学
2008
担当・辻 伸泰
2.7. 転位の 運動と 巨視的 ひずみ
(a)
(b)
(c)
w
d
h
x
b
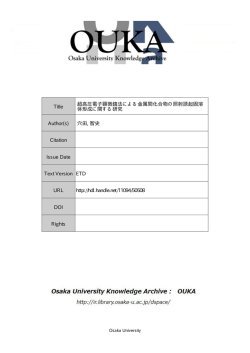
図2.10
図2.10のような h x d x w の直方体 (a) の端から刃状転位が x だけ中に入った状態 (b) を
考える。このときの工学的せん断ひずみは、
" 32 =
b x
#
h d
(2.7)
この結晶の転位密度は、
"=
!
w
1
=
hdw hd
(2.8)
であるから、
" 32 = #b x
(2.9)
!
(2.9)式は、転位の運動とマクロなひずみを結びつける重要な式である。
!
2.8. 降伏点 降下現 象とそ の転位 論的説 明
stress
upper yield
point
twinning
A
lower yield
point
(a)
B (!0.2)
(b)
(c)
(d)
0.2% strain
図2.11
strain
降伏時に見られる様々な応力ひずみ曲線
(2.9)式の両辺を時間tで微分すると、
" 32 =
d"
d#
dx
= bx
+#b
dt
dt
dt
(2.10)
18
!
基盤創成工学
2008 担当・辻 伸泰
右辺第1項が変形を律速する場合、塑性変形は転位密度の増加や減少の速度で決まる。これを回復律
速という。第2項が支配的な場合、転位の運動速度で変形が律速される。これをすべり律速と呼ぶ。
実用材料ではすべり律速のものが多いと考えられ、その場合には、
塑性ひずみ速度:
" 32 =
d"
= #b v
dt
(2.11)
v:転位の平均運動速度
ρ:運動転位の密度
!
ジョンストン(Johnston)とギルマン(Gilman)は、エッチピット観察により、転位の運動速度v
とせん断応力 τ の間に、
v " #m
が成り立つことを実験的に示した。ここでmの値は材料によって異なる定数であり、半導体で1
LiF 結晶で約 25、Fe-Si 合金で約 40、炭素鋼で 10 30、純鉄で 5 10 などの値を取る。
(2.12)
2、
!
<ジョンストン・ギルマン流の降伏点降下現象の説明>
まず、変形初期に、転位が何らかの理由で固着されて動きにくくなっていると仮定する。ひずみ速
度一定で応力を加える(引張試験)と、上降伏点で転位の固着からの離脱あるいは転位限の活動(転
位の増殖)による、運動転位密度 ρ の急激な増加が起こる。ひずみ速度一定であるから、
(2.11)式
よりvが減少する。すると(2.12)式より、応力 τ の低下(降伏現象)が説明される。
ただし、転位の運動速度vを考えるときには、
(i) 運動している転位の実際の平均速度がvである場合
(ii) 転位の自由運動と固着が繰り返され、vは自由運動時の速度よりはるかに小さいと考えら
れる場合
がある。
ところで、図2.11(b) のような明瞭な降伏点降下現象(yield drop; discontinuous yielding)は、
一般的に bcc 結晶において典型的に見られ、fcc や hcp 結晶では観察されない。bcc、または fcc・hcp
結晶の塑性の特徴として、以下の点が上げられる。
bcc:
fcc, hcp:
運動転位密度 ρ が大きく、転位の運動速度 v が小さい(転位の移動度律速)
ρ が小さく、v が大きい(転位の増殖律速)
これは、bcc 結晶では交差すべりが容易で2重交差すべりによる転位限の活性化が期待されるととも
に、らせん転位のパイエルスポテンシャルが大きく、移動が困難である一方、fcc 結晶では交差すべり
が困難である場合が多く、パイエルスポテンシャルも相対的に小さいことで説明できる。
しかし、自由に運動できる転位の数が極端に少なければ、bcc であろうが fcc であろうが、また純金
属であろうが合金であろうが、降伏点降下現象が現れても不思議ではない。
19
基盤創成工学
2008
担当・辻 伸泰
2.9. 転位の まわり の弾性 場
転位の周辺の結晶はひずんでおり、弾性場を有している。このことが転位の性質、ひいては結晶の
強度を支配していると考えることができる。
2.9.1.直線らせん転位の回りの弾性場
図2.12
直線らせん転位の Volterra dislocation model
図2.12のように、x3 軸に平行な直線らせん転位の弾性場を議論する。ここで、転位の芯(core;
中心から数原子分にわたる)の部分は原子配列の乱れが大きく、
弾性論的に計算することはできない。
そこで連続弾性体として取り扱えるように、図2.12のように、転位芯の部分をくりぬいた転位模
型(Volterra dislocation)を考える。円柱座標系(r, θ, x3)を考えると、x1 軸から x3 軸の回りを1
周するごとに、b だけの原子面の上昇がある。よって、任意の点(r, θ, x3)における x3 方向の変位
量 u3 は、
u3 =
"b
2#
(2.13)
tanθ = x2 / x1 であるから、直交座標系(x1, x2, x3)では、
!
u3 =
$x '
b
tan#1& 2 )
2"
% x1 (
(2.14)
他の変位成分はゼロだから、ひずみの定義((1.6)式)より、弾性ひずみ成分は、
!
$
0
&
&
&
eSij = &
0
&
x2
&" b
& 2# 2 2
x1 + x 2
%
0
b
x2 '
)
2# x12 + x 22 )
b
x1 )
2
2# x1 + x 22 )
)
)
0
)
(
"
0
b
x1
2
2# x1 + x 22
(2.15)
等方体のフックの法則((1.20)式)より、直線らせん転位の回りの応力場は、
!
%
0
'
'
'
"Sij = '
0
'
'# µb x 2
' 2$ 2 2
x1 + x 2
&
0
µb x 2 (
*
2$ x12 + x 22 *
µb x1 *
2$ x12 + x 22 *
*
*
0
*
)
#
0
µb x1
2$ x12 + x 22
20
!
(2.16)
基盤創成工学
2008
担当・辻 伸泰
2.9.2.直線刃状転位の回りの弾性場
図2.13
直線刃状転位の Volterra dislocation model
らせん転位と違い、図2.13に示すように、刃状転位の変位 u1 は、θ = π で b だけ不連続的に
変化する。よって刃状転位の弾性場を求めることは、らせん転位よりかなり難しいが、結論だけ記す
と以下の通りとなる。
&
x 2 $ + 3µ) x12 +µ x 22
(" b 2 (
2
( 2#
( $ + 2µ) x12 + x 22
(
(
x1 x12 " x 22
b
E (
e ij =
(
2# (1" %) x 2 + x 2 2
1
2
(
(
0
(
(
'
}
&
x 2 3x12 + x 22
(# µb
( 2$ (1# %)
2
2 2
x
+
x
1
2
(
(
2
2
µb x1 x1 # x 2
E (
" ij =
( 2$ (1# %) 2 2 2
x1 + x 2
(
(
0
(
(
'
2
2
µb x1 x1 # x 2
2$ (1# %) x 2 + x 2 2
{
(
(
)
)
(
!
(
)
(
(
)
)
(1
2
)
2
2
b x 2 (2 $ +µ) x1 "µ x 2
2# $ + 2µ x 2 + x 2 2
(
) 1 2
{
)
(
(
x1 x12 " x 22
b
2# (1" %) x 2 + x 2 2
0
(
(
)
)
( 1 2)
2
2
)
µb x 2 ( x1 # x 2 )
2
) 2$ (1# %) (x12 + x22 )
0
}
)
0+
+
+
+
0+
+
+
0+
+
+
*
(2.17)
)
+
0
+
+
+
+
0
+
+
µ %b
x2 +
#
+
$ (1# %) x12 + x 22 +
* (2.18)
刃状転位の応力場は、対角和(トレース)がゼロではなく、静水圧成分が存在する。らせん転位に
は、静水圧成分が存在しない。
!
転位のまわりの弾性場は、距離の1乗に反比例して減衰する。これは万有引力場やクーロン力場(距
離の2乗に反比例して減衰)に比べて減衰の仕方が緩やかであり、かなり遠方まで到達する。よって、
転位のまわりの応力場を、長距離応力場と呼ぶことがある。
21
基盤創成工学
2008
担当・辻 伸泰
2.10 .転位 の弾性 ひずみ エネル ギー
2.10.1.直線らせん転位の弾性ひずみエネルギー
(1.26)式を用いると、無限大の大きさの物質中の直線らせん転位の弾性ひずみエネルギーは、
1
% V#$ "Sij eSij dx
2
1 ' 2% R
= $ &' $ 0 $ r "S# x 3 eS# x 3 + "Sx 3 # eSx 3 # r dr d# dx 3
0
2
ES =
(
)
(2.19)
!
となる。ここで、r の積分範囲の下限を r0、上限を R とおいている。 r0 は、転位芯の半径(通常 r0
≒ 5 b 程度と考える)である。R は結晶粒の半径を表す。転位のまわりの弾性場より、
!
2 &
#
+ 2" R µ b
E S = ) *+ ) 0 ) r % 2 2 ( r dr d, dx 3
0
$8 " r '
(2.20)
このうち dx3 に関する積分は、単に転位の長さに比例するだけなので、r と θ に対する積分を行う
と、単位長さあたりのらせん転位の弾性ひずみエネルギーとして、
!
E S0 =
µb 2 # R &
ln% (
4 " $ r0 '
が得られる。
(2.21)式の
!
(2.21)
ln( R / r0 )
と 4π
はほぼ同程度の値となることから、粗い近似では、
E S0 = "µb 2
a:1/2
(2.22)
1 程度の定数
とすることも多い。
!
2.10.2.直線刃状転位の弾性ひずみエネルギー
直線刃状転位の弾性ひずみエネルギーは、
E E0 =
%R(
µb 2
ln' *
4 " (1# $) & r0 )
(2.23)
となる。
ポアソン比(ν)は、多くの固体で 1/3 程度の値を取るので、これを大きな違いと考えなければ、
!
転位の弾性ひずみエネルギー(自己エネルギー)は、転位の種類にあまりよらずに、(2.22)式で与え
られると考えても良い。
22
基盤創成工学
2008
担当・辻 伸泰
2.11 .転位 の線張 力
2.10で述べたように、転位はその長さに比例するエネルギーを持っている。従って図2.14
の実線のように曲がっている転位は、破線のように直線になろうとする。これは、転位に線張力 T L が
働いていると考えることができる。
dislocation
TL
TL
図2.14
湾曲した転位に働く線張力
転位のエネルギーとして(2.22)式を用いれば、湾曲により Δl だけ長くなった転位のエネルギー
の増加分 ΔE は、転位のエネルギーの曲率半径依存性を無視すれば、
"E = # µ b 2 "l
(2.24)
よって、
!
TL =
$ "E '
dE
= lim & ) = * µ b 2
dl "l#0% "l (
(2.25)
すなわち、転位の線張力と転位のエネルギーは同等である。
!
23
基盤創成工学
2008
担当・辻 伸泰
3.材料 の強化 機構
金属材料の塑性変形は、多くの場合転位のすべり運動により担われる。ということは、転位の運動
のしにくさこそが、材料の強度であると考えることができる。材料を強化するということは、転位が
運動しにくい状況を作ってやることに対応する。
3.1. 転位に 働く力 (ピー チ・ケ ーラー (Pe ach -K oe hl er)の 式)
外部せん断応力 τ のもとで長さ L の転位が x だけ動いたとき、転位の掃いた面積 S ( = L x ) の
部分では、上下の結晶が相対的に b だけ変位する(図2.9参照)。面積 S の部分に働く力 F は F
= τ S であるから、外力のした仕事 W は、
W =Fb= "Sb= "L xb
(3.1)
これを ( τ b L ) x と書くと、W とは、長さ L の転位が τ b L の力を受けて x だけ動いたときに外
力のした仕事、と考えることができる。すなわち、単位長さの転位には、
!
f="b
(3.2)
の力が働くものと理解できる。
成分まで考慮した厳密表現では、外部応力をσ、バーガースベクトルを
b =(b1, b2, b3) 、転位線の
!
方向を t =(t1, t2. t3) とすると、単位長さあたりの転位に働く力 f =(f1, f2, f3) は、
f =G"t
(3.3)
ただし、 G " # $b
により求めることができる。これをピーチ・ケーラー(Peach-Koehler)の式という。この式は、あ
!
る座標系のもとで応力場と転位の幾何学(転位線方向とバーガースベクトル)が決まれば、転位に働
!
く力が導出できるというものであり、外部応力を負荷したときの転位の運動のみならず、任意の内部
応力場を持つ格子欠陥と転位との相互作用などを考える場合にも利用できる重要な式である。
また、
(3.3)式は外積であることから、転位に働く力の向きは必ず転位線に垂直であることがわか
る。
いま、任意の応力状態(σ)下で、x3 軸に平行な( t =(0,0,1) )刃状転位( b =(b,0,0) )または
らせん転位( b =(0,0,b) )に働く力を考えてみる。
この場合の G は、
刃状転位:
G = ("11 b, "12 b, "13 b)
らせん転位:
G = ("13 b, " 23 b, " 33 b)
! (3.3)式(ピーチ・ケーラーの式)より、
であるから、
!刃状転位:
f = (" 21 b, #"11 b, 0)
(3.4)
f = (" 23 b, #"13 b, 0)
(3.5)
らせん転位:
!
となる。これを図示すると、図3.1のようになる。
!
24
基盤創成工学
2008
担当・辻 伸泰
!11
b
b
!21
f2
! 21
f1
x3
!11
x2
x1
b
b
!23
!13
f2
!13
!23
f1
図3.1
任意の応力場のもとで転位に働く力
3.2. 転位の 運動障 害
前節で述べたように、種々の格子欠陥は転位に相互作用を及ぼし、転位の運動の障害となる。一方、
例えば金属は比較的小さな応力で容易に塑性変形するが、セラミクスやダイヤモンドの塑性変形が非
常に困難であることは良く知られている。こうした物質による違いは、何に由来するのであろうか?。
図3.2のような結晶中の、せん断応力 τ のもとでの刃状転位の1バーガースベクトル分の運動を
考える。図3.2において、(a)と(c)の間に本質的な違いはない。しかし、両者の中間の b/2 だけ動
いた状態(b)は、転位の周囲の原子配列が明らかに(a), (c)とは異なっている。
!
!
(a) x = 0
(b) x = b/2
(c) x = b
図3.2
転位の周囲の原子配列の違いは、転位のポテンシャルエネルギーの違いを生む。もし、状態(b)のポテ
ンシャルエネルギーが状態(a,c)よりも大きければ、(b)の状態を乗り越えるだけのエネルギーを(外力
により)外部から供給しなければ、転位は b/2 以上の距離を動けない。図3.2からもわかるように、
このポテンシャルは転位芯の部分のエネルギー変化に由来している。
上記のポテンシャル変化を、図3.3に模式的に示す。このポテンシャルをパイエルスポテンシャ
ル(Peierls potential)といい、パイエルスポテンシャルを乗り越えるのに必要なせん断応力をパイ
25
基盤創成工学
2008
担当・辻 伸泰
Peierls potential
エルス応力(Peierls stress)と呼ぶ。
0
図3.3
b
b/2
パイエルスポテンシャル
絶対零度では、
臨界せん断応力
=
パイエルス応力
である。金属に比べてセラミクスやダイヤモンドが変形しにくいのは、後者ではパイエルス応力が大
きいことを意味している。
パイエルス応力を決める因子の一つに、結晶の幾何学がある。結晶学的なすべり面の間隔を a 、
バーガースベクトルの大きさを b とすると、b/a の値が大きいほどパイエルス応力が大きくなること
が知られている。そのため、ある材料中でのすべりは、b/a が最も小さくなる最密原子面(面間隔大)
上の最近接原子方向に起こるのが普通である(表2.1参照)。
通常の金属材料の多くは、BCC, FCC, HCP などの簡単な構造を取るため、b/a が小さく、パイエ
ルス応力も相対的に小さい。複雑な結晶構造になると b/a が大きくなってパイエルス応力が大きくな
る(すなわち変形しにくくなる)し、また金属間化合物のように規則構造を取るものは b が大きい
ため、パイエルス応力が大きい。
原子間の結合様式も、パイエルス応力に大きな影響を及ぼす。共有結合結晶では、原子間の結合が
強い方向性を持つため、原子配列のわずかな変化(図3.2(b)参照)でも大きなパイエルスポテンシ
ャルの変化を生じる。イオン結合結晶では、原子配列の変化に伴うイオン間のクーロン力の変化もパ
イエルスポテンシャルに影響する。パイエルス応力はパイエルスポテンシャルの勾配で決まるから、
これらの結晶ではパイエルス応力は大きいことが予想される。一方、金属結晶は、自由電子の雲の中
にある原子の結合の方向性が弱いため、パイエルスポテンシャルの変化が小さいと考えられる。
3.3. 転位の 熱活性 化運動
パイエルスポテンシャルに加え、結晶中には格子欠陥などに由来する様々な転位の運動障害が存在
する。その様子を模式的に図3.4に示す。
dislocation
sl
ip
pl
an
e
obstacle
図3.4
26
基盤創成工学
2008
担当・辻 伸泰
図3.4において、1個の障害物に関与する転位の長さを L とする。障害物が転位の運動を阻害す
る様子は、内部応力による抵抗力が材料中にあると考えることができる。内部応力が長さ L の転位
に作用する力 F の、運動方向 x に対する変化を図3.5に模式的に示す。
F
!m b L
!bL
+
x
0
図3.5
外部せん断応力 τ が加わって、転位が左から右へ動くとする。このとき、長さ L の転位に働く力は、
ピーチ・ケーラーの式より、τ b L である。F には正負があり、負の領域に位置する転位は運動を助
けられるが、正の領域では抵抗力を受け、抵抗力 F がちょうど τ b L となったところで停止する。
図3.5の障害を乗り越えるためには、少なくとも外部から τm のせん断応力力を加え、転位に
τm b L の力を加える必要がある。
絶対零度では、τm b L の力を加えない限り、転位は障害を乗り越えて運動することができない。し
かし、有限の温度では、外部応力に加え、原子の熱振動のエネルギーを利用することができる。従っ
て、障害を乗り越えるために加える必要のある外部せん断応力は小さくて済む。こうした熱エネルギ
ーの助けを借りた転位の運動を、熱活性化運動と呼ぶ。原子の熱振動のエネルギーは温度が高いほど
大きくなるから、材料を変形させるのに必要な外部負荷応力(すなわち材料の強度)は、温度が高い
ほど小さくなる。
材料中の転位運動の障害物には、長距離障害物(long-range obstacle)と短距離障害物(short-lange
obstacle)がある。
・長距離障害物の例:他の転位との弾性相互作用、比較的大きな第2相・介在物結晶粒界
・短距離障害物の例:パイエルスポテンシャル、林立転位との切り合い、ジョグの引きずり
抵抗固溶原子、微細な析出物
長距離障害物または短距離障害物による運動抵抗を、図3.6に模式的に示す。
27
基盤創成工学
2008
(a) long-range obstacle
担当・辻 伸泰
!m b L
!a b L
x
(b) short-range obstacle
!m b L
!* b L
x
!"#$%&'%()*+,-./0
図3.6
いま、ある温度では図中の正方形の面積に等しいだけの熱エネルギーが、1つの障害物を乗り越え
る過程で供給され、転位の運動を助けると仮定する。長距離障害物(a)の場合、熱振動により供給され
るエネルギーは、障害物を乗り越えるのに必要な山の面積(エネルギー)のごく一部に過ぎない。よ
って、山を乗り越えるためには依然として外力による仕事が欠かせず、長距離障害物の場合は有限温
度であっても、障害物を乗り越えるのに必要な外部せん断応力 τa は、τm にほぼ等しい。一方、短距
離障害物(b)の場合には、熱振動によるエネルギーが、個々の障害による山の大きな部分を占める。よ
って外力による仕事は小さくて済み、この場合に必要な外部せん断応力 τ* は、τ* < τm である。
以上のように、一般に、塑性変形に要する応力 t は、
" = "a + " *
(3.6)
と書ける。τa は長距離障害物によるもので、温度に依存しないことから、非熱的応力(athermal
stress)と呼ぶ。τ*は短距離障害物によるもので、原子の熱振動のエネルギーの寄与を反映して温度
!
に強く依存し、有効応力(effective
stress)と呼ばれる。τ*は温度だけでなくひずみ速度(変形速度)
にも依存する。
28
基盤創成工学
2008
担当・辻 伸泰
3.4. 材料の 強化法
材料の強化法は、表3.1のように分類することができる。いずれも、障害物によって転位の運動
を阻害するという意味では共通の原理に立脚している。
表3.1
材料の強化機構
加工硬化(転位強化)
加工によって転位密度を高める
結晶粒微細化強化
結晶粒を微細化する
固溶強化
置換型または侵入型固溶原子を導入する
析出強化
主に時効熱処理によって微細な第二相析出物を分散させる。広
義にはスピノーダル分解による強化も含む。
分散強化
酸化物・介在物などの粒子を分散させる
複合強化
異なる材料を複合化する
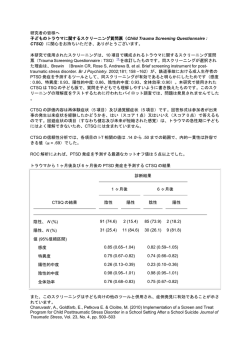
3.4.1.加工硬化(転位強化)
,-
図3.7に示すように、金属材料を比較的低温で塑性変形すると、降伏後ひずみが増すとともに変
形応力は高くなる。これを加工硬化(work-hardening あるいは strain-hardening)という。
'(
0
#$%&
/
!"
1
.
)*+
図3.7
加工硬化
繰り返すように、材料の塑性ひずみは転位のすべり運動によってもたらされる。すべり運動した転位
がすべて材料の表面に抜けてしまったり、あるいは正負合体消滅してしまえば、変形前後の結晶の状
態に、マクロな形状変化以外には本質的な違いはなく、加工硬化は起こらない。しかし、材料中には
結晶粒界や大きな第2相・介在物などの強固な運動障害があり、
転位はそうした障害にトラップされ、
堆積する。また、異なるすべり面上の転位が交差・切り合いを起こせばジョグやキンクが生じ、その
うちのあるものは不動化して後続の転位の障害となる。このようにして、運動転位の一部は材料中に
蓄積されて行き、塑性ひずみの増加とともに材料中の転位密度は増加する。 こうした蓄積転位が、後
続の転位と相互作用を起こしてその運動を阻害する。これが加工硬化が起こる理由である。
このような原理から考えて、加工硬化は「転位強化」と呼ぶこともできる。
29
基盤創成工学
2008
担当・辻 伸泰
単結晶の典型的な応力ひずみ曲線は、図3.8のような形を示す。
stress
III
II
I
strain
図3.8
単結晶の典型的な応力ひずみ曲線
こうした加工硬化曲線は、特に FCC 単結晶で典型的に見ることができる。図3.8中に記入したよ
うに、応力ひずみ曲線は3つの領域に分けることができる。
ステージ I:容易すべり領域(easy glide region)
・・・主すべり系の転位の運動による変形
ステージ II:直線硬化領域(linear hardening region)・・・主すべり系に加えて2次すべ
り系の転位が活動。加工硬化が最も顕著に起こる。
ステージ III:放物線硬化領域(parabolic hardening region)
・・・交差すべりの開始により、
転位が障害物から逃れて合体消滅する、動的回復(dynamic recovery)が生
じる。
単結晶のせん断変形応力 τと転位密度ρ の間には、
"=#µb $
α:
μ:
b:
!
(3.7)
0.5 程度の値の定数
剛性率
バーガースベクトルの大きさ
なる関係がおおよそ成立する。これをベイリー・ハーシュ(Bailey-Hirsch)の式という。この式にお
ける転位密度 ρ は、2次すべり系の林立転位密度であることがほぼ明らかになっている。加工硬化
ステージ II 以降は、結晶中の全転位密度は2次すべり系の林立転位密度と同程度であるため、ベイリ
ー・ハーシュの式によって変形応力と結晶中の全転位密度の関係を見積もることができる。
3.4.2.結晶粒微細化強化
結晶粒界(grain boundary)とは、異なる結晶方位を持つ隣接粒間の境界である。したがって一般
にある結晶粒中のすべり面は粒界を挟んで連続してはおらず、通常転位は粒界を通り越えて運動する
ことはできない。一般に、材料の降伏強度 と平均結晶粒径 d の間には、
#
"y = "0 + k d
1
2
(3.8)
な る 関 係 が 経 験 的 に 成 り 立 つ こ と が 知 ら れ て い る 。 こ れ を ホ ー ル ・ ペ ッ チ の 式 ( Hall-Petch
!
30
基盤創成工学
2008 担当・辻 伸泰
relationship)という。ホール・ペッチの関係は、降伏応力だけではなく、引張強さやあるひずみの
時の変形応力、あるいは劈開破壊応力などについても成り立つことが多い。また、材料の靭性も d-1/2
に比例して向上する場合がある。
<ホール・ペッチの関係の転位論に基づく説明(転位の堆積モデル)>
ホール・ペッチの式はあく ま で経 験的 な 式 であるが、それを理論的に説明しようという試みがい
くつかなされている。ここではそのうちの転位の堆積モデルを示す。変形初期に、外部せん断応力 τ
のもとで粒内の転位源(例えばフランク・リード(Frank-Read)源)から発生した n 本の同符号の
刃状転位は、図3.9のように結晶粒界に堆積する。
grain
boundary
!
dislocation
source
0 x1 x2
x3
xn-1
slip plane
L
!
図3.9
結晶粒界における転位の堆積
各々の転位には、外部せん断応力に加えて、他の転位からの反発力が作用している。単位長さの先頭
の転位が外部応力と他の転位から受ける力 f0 は、
f0 = " n # b
(3.9)
と求められる。すなわち、堆積の先頭転位には外力をn倍した集中応力が作用している。(同時に、転
位は結晶粒界から同じ大きさで逆向きの反作用力(back stress)を受けている)先頭の転位にかかる
! n τ が、隣の結晶粒内に新たな転位源を作る(あるいは転位源を活性化させる)だけの臨
集中応力
界値 に達すれば、多結晶体は巨視的な降伏を起こす。すなわち、この場合の降伏条件として、
n " = "c
(3.10)
と書くことができる。
ところで、図3.9におけるn本の転位の堆積距離 L は、
!
L=
nµb
(1 " #) $ %
(3.11)
と表される(らせん転位の場合は (1-ν) の項がなくなる)。平均粒径 d の多結晶体における L の最
大値はおおよそ
!
L"
d
2
と見積もることができるから、
(3.10)
(3.12)
(3.12)式より n と L を消去して、
!
31
基盤創成工学
2008
担当・辻 伸泰
1
)
µb 2
1
&2 "
#
c
"='
* d 2
1
#
$
%
) +
((
(3.13)
のように、変形応力が粒径の -1/2 乗に比例するという式(ホール・ペッチの関係)が得られる。
!
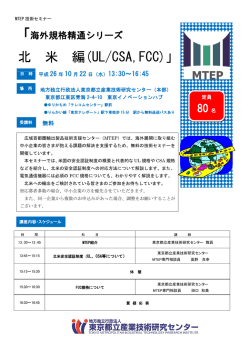
3.4.3.結晶粒界の拘束効果
ある応力状態のもとで、結晶中の各すべり系の活動のしやすさには優劣がある。図3.10に示す
ように、単結晶の場合にはそうした優劣のもと、主すべり系が優先的に活動し、それに応じた形状変
化がもたらされる。しかし、多結晶体中の結晶は隣接粒に囲まれており、単結晶のような勝手な変形
をしたのでは、粒界部に空隙や重なりを生じてしまう(図3.10右)。
!
ry
ma em
pri syst
slip
!"#
$%
!
single crystal
polycrystal
図3.10
実際の多結晶体においては、粒界部での変位の連続性を満足するように、個々の結晶粒の変形が生じ
ている。これを結晶粒界の拘束効果(constraint effect)という。
粒界の拘束を満足させるためには、単一のすべり系の活動のみでは無理であることが直感的にも明
らかである。ひずみには6個の独立成分がある(1.2.1.節)ことから、結晶を任意の形に変形させるた
めには、6個の塑性ひずみ成分が任意にとれなければならない。しかし、すべり変形は体積変化を伴
わないことから、
体積不変条件:
"11 + "22 + "33 = 0
(3.14)
を満たす必要があり、独立な塑性ひずみ成分は5個となる。従って、結晶を任意の形に変形させるた
めには、少なくとも5個の独立なすべり系が必要となる。これを、フォンミーゼスの条件(von Mises'
!
condition)という。
FCC や BCC のような対称性の良い結晶系の場合、独立なすべり系は多数あり、フォンミーゼスの
条件を満たすことは容易である。しかし、例えば HCP 結晶の場合、底面すべりだけだと独立なすべ
り系は2つしかない。したがって HCP 多結晶体が変形するためには柱面すべりや錐面すべりが活動
する必要があるが、これらの活動は底面すべりよりも困難である。このように対称性の良くない結晶
は独立なすべり系の数が少なく、フォンミーゼスの条件を満たすことが困難となる結果、FCC や BCC
などに比べて小さなひずみで破壊に至ってしまう(延性が小さい)場合が多い。
32
基盤創成工学
2008
担当・辻 伸泰
多結晶体の変形を考える場合の考え方として、
トレスカ(Tresca)の考え方:各結晶粒は単結晶と同様に変形する
テイラー(Taylor)の考え方:各結晶粒は、材料のマクロなひずみと同じひずみを生じる
ように変形する
という2種類の考え方がある。トレスカの考え方では、図3.10に示したように、結晶粒界に重な
りや空隙が生じてしまう。一方、テイラーの考え方では、各結晶粒の方位に由来した異方性を過小評
価している。現実の結晶が両者の中間的な振る舞いをすることは容易に理解できるが、種々の実験結
果より、金属多結晶の不均一性を考慮しないマクロなレベルでの変形は、テイラーの考え方でよく説
明できることが知られている。
以上の議論からわかるとおり、多結晶体が巨視的に降伏するためには、多重すべり(multiple slip)
が生じることが必要である。多結晶体において多重すべりを起こすのに必要な平均的な分解せん断応
力を τy とすれば、シュミット因子と類似の考え方で、引張変形により得られる単軸降伏応力σy と
の間には、
"y =
#y
M
(3.15)
なる関係が成り立つ。この方位因子Mを、テイラー因子(Taylor factor)という。テイラー因子は多
結晶体におけるシュミット因子の逆数に相当する。
!
テイラー因子は多結晶体中の結晶粒の方位の集積状況(集合組織(texture))に影響されるが、一
般的に FCC 多結晶体では、M = 3.06 が妥当な値として良く用いられる。BCC の場合には、M = 2.0
を使う場合もある。
33
基盤創成工学
2008
担当・辻 伸泰
3.4.4.障害物を散りばめる強化法に共通する考え方
固溶強化・析出強化・分散強化は、材料中に転位の障害物を散りばめるという点で共通している(転
位強化も、林転位を材料中に導入すると考えれば同様に扱うことができる)。いま、すべり面上に障害
物が平均間隔 L0 で分布しているとする。1本の運動転位を考え、その転位上には障害物が平均間隔
L で存在しているものとする。外部せん断応力 τによってこの転位を動かす場合、転位の運動は障
害物のところで阻止され、図3.11のような転位の張り出しが起こる。
!"#$%&'()*+,(-.
!c
!/#$0&'()*+,(-.
!c
L
図3.11
障害物のピン止めによる運動転位の張り出し
転位が臨界角度 φc をなすように円弧状に曲がったら、転位の線張力(矢印)の合力によって障害物
を乗り越えることができるとする。強い障害物であるほど φc は小さくなり、絶対的な障害物の場合
は転位は半円形まで張り出し、 φc = 0 となる。1つの障害物が、相互作用によって転位に作用する
最大力を Fm とすると、絶対零度で転位が障害物を乗り越えるのに必要な外部せん断応力 τa は、
" a b L = Fm
(3.16)
となる。障害物からはずれる瞬間には、Fm と転位の線張力(TL)の合力が釣り合うはずだから、
!
" a b L = 2 TL cos
#c
2
(3.17)
となる。この式より、変形応力(τa )を知るためには、φc すなわち Fm と、L を知る必要がある
ことがわかる。
!
L については、障害物の障害としての強固さにより分類すると、
強い障害物の場合:φc≅ 0
弱い障害物の場合:φc≅ π
転位は大きく曲がり、L≅ L 0
転位は曲がらず、L>>L0
(図3.12参照)
34
基盤創成工学
2008
担当・辻 伸泰
!"#$%
L0
L
&"#$%
図3.12
3.4.5.分散強化
分散強化では、材料内にマトリクスよりも硬く塑性変形しにくい粒子を分散させ、転位運動の障害
とする。この場合、粒子は転位に切られることのない強固な障害、絶対的なピン止め点であると考え
る。よって、
Fm
=1
2 TL
" c = 0,
(3.18)
であり、(3.17)式より L = L0 とおいて、
!
" m # "OR =
2 TL µ b
=
b L0 L0
(3.19)
ただしここで、転位の線張力として(2.25)式でα=0.5
!
この臨界分解せん断応力
としている。
を、オロワン応力(Orowan stress)と呼ぶ。
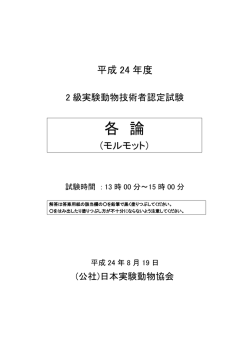
dislocation
Orowan loop
L0
2r
particle
図3.13
オロワン機構
図3.13に示すように、粒子は絶対的なピン止め点であるので、転位は半円形になるまで張り出す
が、その後粒子を迂回して進み、粒子のまわりにオロワンループ(Orowan loop)と呼ばれる転位ル
ープを残す。この機構をオロワン機構(Orowan mechanism)という。
35
基盤創成工学
2008
担当・辻 伸泰
(3.19)式の L0 に、幾何学的考察より得られる、
1
"2%2
L0 = $ ' r
#f &
を代入すると、
!
"OR =
µ b 0.7 µ b f
#
L0
r
(3.20)
( (Fm/2TL) ≅ 1 のとき)
という分散強化理論の別表現を得る。
!
つまり、分散強化による強化量は、分散粒子の大きさ r に反比例し、体積率 f の 1/2 乗に比例する。
3.4.6.固溶強化(solution hardening)
固溶強化とは、固溶原子と転位との相互作用を利用して材料を強化する方法である。溶質原子と転
位の相互作用を考える場合に重要なのは、寸法効果
s
Fm
=µ b r "
(3.21)
ただし
!
"=
rs # rm
rm
(3.22)
rs:溶質原子の半径
rm:母相原子の半径
!
と剛性率効果
Fmm
µ b2 #
"
20
(3.23)
"=
d(lnµ)
dc
(3.24)
ただし、
!
μ :固溶体の剛性率
c :溶質原子濃度
!
である。
36
基盤創成工学
2008
!"#$%&'(
図3.14
担当・辻 伸泰
!)#$*+,-.
固溶原子あるいは整合析出物による寸法効果
ここで溶質原子の場合には、
r"
b
2
(3.25)
であり、(3.21)式の " や(3.23)式の " /20 は1に比べて小さい値を取る。よって、(3.21, 3.23)
式の Fm!は、ともに
!
Fm
<<1 !
2 TL
となる。すなわち、固溶原子は「弱い」障害物として取り扱うことができる。
(b) Labusch limit
(a) Friedel limit
2
~L !
!
"c
L
L0
図3.15
固溶強化におけるフリーデル限界(a)とラバッシュ限界(b)
図3.15(a)のように、転位が溶質原子を1個1個はずしながら運動して行く過程を考えると、
1
3'
#
3
% 2 (Fm ) 2 % * c - 2
"m = $
0
2
µ
1
(
2
,
/
b3
%
%+ µ .
&
)
c
(3.26)
が得られる。この式によれば、固溶強化は溶質原子濃度の 1/2 乗に比例する。これは、図3.15(a)
のように1回の転位運動の素過程に1個の溶質原子のみが関与すると考えている。これをフリーデル
!
限界(Friedel
limit)という。フリーデル限界((3.26)式)は、希薄固溶体の場合に実験結果と良く
一致する。
一方、溶質原子の濃度が大きくなって、個々の原子の弾性場が重なるようになると、1回の転位運
動の素過程に複数の溶質原子が関与するようになる(図3.15(b))。この場合は、
37
基盤創成工学
2008
1
# F4 c2 w & 3
"m = % m 7
(
$ 8 b TL '
担当・辻 伸泰
1
# F4 c2 w & 3
=% m 9 (
$ 4µb '
(3.27)
w :転位と溶質原子の相互作用の及ぶ範囲を示すパラメーター、5b 程度
なる式が得られる。これをラバッシュ限界(Labusch limit)という。ラバッシュ限界の場合、臨界せ
!
ん断応力は濃度の 2/3 乗に比例する。これが実験結果と一致する場合も多い。
3.4.7.析出強化 (precipitation hardening)
析出強化においては、微細な析出物を母相に密に散りばめ、転位の障害物とする。析出強化の分散
強化との違いは、析出物が微細であるため障害物として弱い点にある。障害物としての弱さは、析出
物の多さでカバーされる。
半径 r、体積率 f の球状析出物の、転位線上の平均粒子間隔 L を、
1
1
" µ b2 % 2
" T %2
L = $ L ' L0 = $
' L0
# Fm &
# 2 Fm &
(3.28)
とする。
Fm として、寸法効果を考えてみると、
!
1
# r b &2
L =% (
$ " f'
(3.29)
が得られる。これより、
!
2
3
1
# f r& 2
! a = µ " %% ((
$ b'
(3.30)
が得られる。すなわち、析出強化量は、析出物の大きさ r と体積率 f の 1/2 乗に比例する。
析出粒子が大きくなって転位が貫通することができなくなると、オロワン機構が起こるようになる。
その場合には、(3.19)または(3.20)式が適用されるようになる。
38
© Copyright 2026 Paperzz